第七章 PLC传送比较指令及.
- 格式:ppt
- 大小:1.82 MB
- 文档页数:58
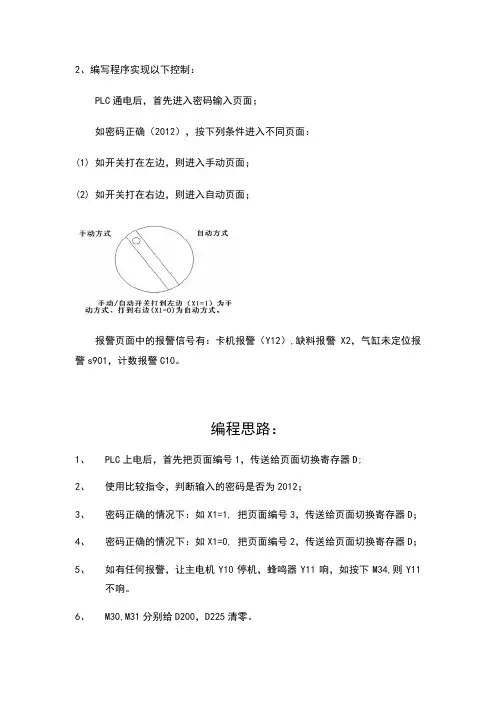
2、编写程序实现以下控制:PLC通电后,首先进入密码输入页面;如密码正确(2012),按下列条件进入不同页面:(1) 如开关打在左边,则进入手动页面;(2) 如开关打在右边,则进入自动页面;报警页面中的报警信号有:卡机报警(Y12),缺料报警X2,气缸未定位报警s901,计数报警C10。
编程思路:1、PLC上电后,首先把页面编号1,传送给页面切换寄存器D;2、使用比较指令,判断输入的密码是否为2012;3、密码正确的情况下:如X1=1, 把页面编号3,传送给页面切换寄存器D;4、密码正确的情况下:如X1=0, 把页面编号2,传送给页面切换寄存器D;5、如有任何报警,让主电机Y10停机,蜂鸣器Y11响,如按下M34,则Y11不响。
6、M30,M31分别给D200,D225清零。
3.1 传送指令今天,我们来学习跟“数值传送”相关的功能指令。
在控制应用中,一个控制程序总是需要初始数据,这些数据可以通过各种方式获得,如从外部器件读取,或在程序开始运行时,从内部存储单元获取,因此,机内的数据传送是不可缺少的。
一、传送指令的“助记符”在三菱的指令系统里,比较指令的“指令记号”是MOV,也就是Move (移动,运输)的简写。
二、传送指令的格式“比较指令的指令格式”如下:其中:是传送源;是传送目标。
指令规定:传送源:可以是字元件,如T、C、D、V/Z,也可以是位组合的字元件KnX,KnY,KnM,KnS,当然可以是十进制数K、十六进制数H。
是传送目标:必须是字元件,如T、C、D、V/Z,也可以是位组合的字元件KnY,KnM,KnS。
操作数格式如下所示:三、传送指令的常用用法传送指令一般用于读出内部存储器件的当前值、数据间接赋值和位传送。
1、读出内部存储器件的当前值此行程序表示,当X1导通时,将定时器T0的当前计时值读出,存储在数据寄存器D20中。
2、数据间接赋值上述程序表示,当X2导通时,将K100传送给数据寄存器D10,当X2关断时,将K50传送给数据寄存器D10,当M0导通时,定时器T20开始计时。



01教学目标与任务02相关理论知识03训练任务04课堂练习【教学目标】1.掌握比较指令的功能及应用编程2.熟悉S7-200系列PLC的结构和外部I/O接线方法3.熟悉STEP7-Micro/WIN编程软件的使用方法4.熟悉传送带的PLC控制工作原理和程序设计方法【教学任务】1.练习比较指令的基本使用方法,能够正确编制传送带的PLC控制程序;2.能够独立完成传送带的PLC控制的安装;3.按规定进行通电调试,出现故障时,能根据设计要求独立检修,直至系统正常工作。
字节比较整数比较双整数比较实数比较字符串比较应用比较指令的应用产生断电6s、通电4s的脉冲输出信号。
1. 任务引入传送带输送工件,数量为20个。
连接I0.0端子的光电传感器对工件进行计数。
当计件数量小于15时,指示灯常亮;当计件数量等于或大于15时,指示灯闪烁;当计件数量为20时,10s后传送带停止,同时指示灯熄灭。
2. 任务分析根据任务要求,有小于、大于和等于的时候,采用比较指令。
1)设备配置连接导线若干05PC/PPI 电缆04装有STEP7-Micro/WIN 编程软件的PC 机03传送带显示控制模块021台S7-200 CPU224 PLC 01输入输出输入继电器输入元件作用输出继电器控制元件控制对象I0.0光电传感器计数Q0.0接触器KM电动机M I0.2SB1常开触点启动Q0.2HL指示灯I0.3SB2常闭触点停止6)通电调试,验证是否符合设计要求1编写梯形图程序,编译后下载到PLC中2按下开关SB1,传送带启动;按下SB2,传送带停止3按下SB3,偶数灯亮;按下开关SB4,全部灯灭。
4检修线路连接和梯形图程序,直至能够正常工作①某生产线有5台电动机,要求每台电动机间隔5s启动,用比较指令编写控制程序。
结合学生完成的情况进行点评并给出考核成绩,展示学生优秀设计方案和程序,激发学生学习热情。
考核内容满分评分要求备注选择输入输出设备及地址10设备及端口地址选择正确每错一个扣1分画出I/O接线图10接线图正确、标注完整每错一处扣1分编制梯形图程序30梯形图格式正确,结构合理每错一处扣5分外部接线正确15电源线、通讯线及I/O信号线接线正确每错一处扣5分写入程序调试15操作步骤正确,动作熟练。
PLC 传送和比较指令的用法使用案例详细说明
1、比较指令CMP
CMP 指令有三个操作数:两个源操作数[S1.]和[S2.],一个目标操作数[D.],该指令将[S1.]和[S2.]进行比较,结果送到[D.]中。
CMP 指令使用说明如图所示。
2、区间比较指令ZCP
ZCP 指令是将一个操作数[S.]与两个操作数[S1.]和[S2.]形成的区间比较,且[S1.]不得大于[S2.],结果送到[D.]中。
ZCP 指令使用说明如图所示。
3、传送指令MOV
MOV 指令将源操作数的数据传送到目标元件中,即[S.]→[D.]。
MOV 指令的使用说明如图所示。
当X0 为ON 时,源操作数[S.]中的数据K100 传送到目标元件D10 中。
当X0 为OFF,指令不执行,数据保持不变。
4、移位传送指令SMOV。