(参考资料)结构有限元练习题
- 格式:pdf
- 大小:351.37 KB
- 文档页数:8
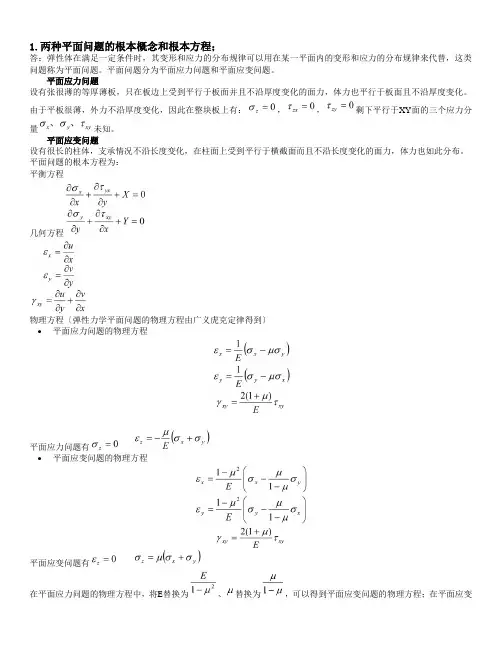
1.两种平面问题的根本概念和根本方程;答:弹性体在满足一定条件时,其变形和应力的分布规律可以用在某一平面内的变形和应力的分布规律来代替,这类问题称为平面问题。
平面问题分为平面应力问题和平面应变问题。
平面应力问题设有张很薄的等厚薄板,只在板边上受到平行于板面并且不沿厚度变化的面力,体力也平行于板面且不沿厚度变化。
由于平板很薄,外力不沿厚度变化,因此在整块板上有:,,剩下平行于XY面的三个应力分量未知。
平面应变问题设有很长的柱体,支承情况不沿长度变化,在柱面上受到平行于横截面而且不沿长度变化的面力,体力也如此分布。
平面问题的根本方程为:平衡方程几何方程物理方程〔弹性力学平面问题的物理方程由广义虎克定律得到〕•平面应力问题的物理方程平面应力问题有•平面应变问题的物理方程平面应变问题有在平面应力问题的物理方程中,将E替换为、替换为,可以得到平面应变问题的物理方程;在平面应变问题的物理方程中,将E替换为、替换为,可以得到平面应力问题的物理方程。
2弹性力学中的根本物理量和根本方程;答:根本物理量有:空间弹性力学问题共有15个方程,3个平衡方程,6个几何方程,6个物理方程。
其中包括6个应力分量,6个应变分量,3个位移分量。
平面问题共8个方程,2个平衡方程,3个几何方程,3个物理方程,相应3个应力分量,3个应变分量,2个位移分量。
根本方程有:1.平衡方程及应力边界条件:平衡方程:边界条件:2.几何方程及位移边界条件:几何方程:边界条件:3.物理方程:3.有限元中使用的虚功方程。
对于刚体,作用在其上的平衡力系在任意虚位移上的总虚功为0,这就是刚体的平衡条件,或者称为刚体的虚功方程。
对于弹性变形体,其虚位移原理为:在外力作用下处于平衡的弹性体,当给予物体微小的虚位移时,外力的总虚功等于物体的总虚应变能。
设想一处于平衡状态的弹性体发生了任意的虚位移,相应的虚应变为,作用在微元体上的平衡力系有〔X,Y,Z〕和面力。
外力的总虚功为实际的体力和面力在虚位移上所做的功,即:在物体产生微小虚变形过程中,整个弹性体内应力在虚应变上所做的功为总虚应变能,即:其中为弹性体单位体积内的应力在相应的虚应变上做的虚功,由此得到虚功方程:4.节点位移,单元位移及它们的关系。
西⼯⼤结构有限元习题库有限元法基础及应⽤习题集⼀、填空1. 有限元法是求解连续场⼒学和物理问题的⼀种⽅法。
⽤有限元法求解连续体或结构的⼒学问题的三个主要步骤是:①;②;③。
2. 离散化就是把连续体或结构分割成若⼲个在处相互连接,尺⼨有限的结合体来代替原来的连续结构。
3. 单元分析阶段导出的单元刚度⽅程建⽴了和之间的关系。
单元刚度⽅程的核⼼是矩阵。
该矩阵具有性和性,且主对⾓元素。
4. 建⽴实体单元(⼀维杆单元、三节点三⾓形平⾯单元等)的刚度⽅程时,须应⽤作为平衡条件。
5. 弹性⼒学⼏何⽅程反映弹性体变形时和之间的关系。
6. 单元位移模式[]{}e N v u δ=?中[]N 称为矩阵。
该⽅程的含义是。
7. 单元某节点i 的形函数N i 在该点的值为,在其它节点的值均为。
⼀个单元所有节点形函数之和等于。
8. 作⽤在单元上的载荷须按的原则移置到节点上,因为。
9. 单元刚度矩阵奇异性的⼒学意义是:。
10. 结构有限元平衡⽅程[]{}{}Q K =δ建⽴了有限元离散结构中节点的和之间的关系。
该⽅程的⼒学意义是有限元离散结构中节点的和之间的平衡。
11. 整体刚度矩阵具有如下性质:①②③④。
12. 对⼀定的有限元⽹格,整体刚度矩阵的半带宽与有关。
半带宽越⼩,求解时占⽤计算机资源。
13. 为保证有限元解的收敛性,单元位移模式应满⾜和。
14. 建⽴任意形状和⽅位平⾯四边形单元和空间六⾯体单元时,需要采⽤与单元位移模式中相同的⽤局部坐标表⽰的节点形函数对节点坐标进⾏插值以获得⼀种坐标变换,这种变换称为,采⽤等参变换的单元称为。
15. 节点数越多的单元,其位移模式多项式,单元的能⼒越强,所以精度。
16. 弹性⼒学⼏何⽅程反映弹性体变形时和之间的关系。
17. 弹性⼒学边界条件包括和。
18. 弹性体的虚位移是假想在弹性体上发⽣的满⾜条件的微⼩位移场。
弹性体的虚功原理可以概括为等于。
19.弹性⼒学物理⽅程反映弹性体变形时和之间的关系。
习题2.1 解释如下的概念:应力、应变,几何方程、物理方程、虚位移原理. 解 错误!应力是某截面上的应力在该处的集度。
○,2 应变是指单元体在某一个方向上有一个ΔU 的伸长量,其相对变化量就是应变.X U Xx ∆∆=ε表示在x 轴的方向上的正应变,其包括正应变和剪应变.○3几何方程是表示弹性体内节点的应变分量与位移分量之间的关系,其完整表示如下:Txz yz xy z y x x w z u zv y w y u x v z w y vx u x w z u z v y w y u x v z w y v x u ⎥⎦⎤⎢⎣⎡∂∂+∂∂∂∂+∂∂∂∂+∂∂∂∂∂∂∂∂=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∂∂+∂∂∂∂+∂∂∂∂+∂∂∂∂∂∂∂∂=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=γγγεεεε错误!物理方程:表示应力和应变关系的方程某一点应力分量与应变分量之间的关系如下:⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=666564636261565554535251464545434241363534333231262524232221161514131211αααααααααααααααααααααααααααααααααααατττσσσσxz yz xy z y x ⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡xz yz xy zz yy xx γγγεεε错误!虚位移原理:在弹性有一虚位移情况下,由于作用在每个质点上的力系,在相应的虚位移上虚功总和为零,即为:若弹性体在已知的面力和体力的作用下处于平衡状态,那么使弹性体产生虚位移,所有作用在弹性体上的体力在虚位移上所做的工就等于弹性体所具有的虚位能. 2.2说明弹性体力学中的几个基本假设。
错误! 连续性假设:就是假定整个物体的体积都被组成该物体的介质所填满,不存在任何间隙. 错误! 完全弹性假设:就是假定物体服从虎克定律。

1有限元是近似求解_一般连续_场问题的数值方法2有限元法将连续的求解域离散为若干个子域_,得到有限个单元,单元和单元之间用节点相连3从选择未知量的角度来看,有限元法分为三类位移法. 力法混合法4以_节点位移_为基本未知量的求解方法称为位移法.5以_节点力_为基本未知量的求解方法称为力法。
6一部分以__节点位移__,另一部分以_节点力_为基本未知量的求解方法称为混合法.7直梁在外力的作用下,横截面的内力有剪力_和_弯矩_两个。
8平面刚架结构在外力的作用下,横截面上的内力有轴力_ 、剪力_和弯矩。
9进行直梁有限元分析,平面刚架单元上每个节点的节点位移为挠度和转角10平面刚架结构中,已知单元e的坐标变换矩阵[T e]和在局部坐标系x'O'y'下的单元刚度矩阵[K’]e,则单元在真体坐标系xOy下的单元刚度矩阵为_ [K]e= [T e]T[K’]e [T e]13弹性力学问题的方程个数有15个,未知量的个数有15个.14弹性力学平面问题的方程个数有8_个,未知量个数有8_个15几何方程是研究__应变___和_位移之间关系的方程16物理方程是描述_应力_和_应变_关系的方程17平衡方程反映了_应力__和_位移_之间关系的18把经过物体内任意一点各个_ 截面上的应力状况叫做__该点_的应力状态19形函数在单元上节点上的值,具有本点为_1_.它点为零的性质,并且在三角形单元的任一节点上,三个行函数之和为_1_20 形函数是_三角形_单元内部坐标的_线性位移_函数,他反映了单元的_位移_状态21在进行节点编号时,要尽量使用同一单元的相邻节点的狭长的带状尽可能小,以使最大限度地缩小刚度矩阵的带宽,节省存储,提高计算效率.22三角形单元的位移模式为_线性位移模式_—23矩形单元的位移模式为__线性位移模式_24在选择多项式位移模式的阶次时,要求_所选的位移模式应该与局部坐标系的方位无关的性质为几何_各向同性25单元刚度矩阵描述了_节点力_和_节点位移之间的关系26在选择多项式作为单元的位移模式时,多项式阶次的确定,要考虑解答的收敛性,即要满足单元的_完备性和协调性要求27三节点三角形单元内的应力和应变是_常数,四节点矩形单元内的应力和应变是线性_变化的28在矩形单元的边界上,位移是线性_变化的29整体刚度是一个呈_ 狭长的带状_分布的稀疏矩阵30整体刚度[K]是一个奇异阵,在排除刚体位移_后,它正义阵1从选择未知量的角度来看,有限元法可分为三类(力法,位移法,混合法)2下列哪有限元特点的描述中,哪种说法是错误的(D需要使用于整个结构的插值函数)3几何方程研究的是(A应变和位移)之间关系的方程式4物理方程是描述(D应力和应变)关系的方程5平衡方程研究的是(C应力和位移)之间关系的方程式6在划分单元时,下列哪种说话是错误的(A一般首选矩形单元)7下列哪种单元的单元刚度矩阵必须通过积分才能得到(D矩形单元)8单元的刚度矩阵不取决于下列哪种因素(B单元位置)9可以证明,在给定载荷的作用下,有限元计算模型的变形与实际结构变形之间的关系为(B前者小于后者)10ANSYS按功能作用可分为若干个处理器,其中(B求解器)用于施加载荷和边界条件11下列有关有限元分析法的描述中,哪种说话是错误的(B单元之间通过其边界连接成组合体)12下列关于等参数单元的描述中,哪些说话是错误的(C将规则单元变换为不规则单元后,易于构造位移模式)13从选择未知量的角度来看,有限元可以分为三类,混合法的未知量是(C节点力和节点位移)14下列对有限元特点的描述中,哪种说话是错误的(B对有限元求解域问题没有较好的处理方法)15在划分单元时,下列哪种说话错误(D自由端不能取为节点)16对于平面问题,选择单元一般首选(D三角形单元或等参单元)17下列哪种说法不是形函数的性质(C三角形单元任一条边上的形函数,与三角形的三个节点坐标都有关)18下列四种假设中,哪种分析不属于分析弹性力学的基本假设(C大变形假设)19下列四种假设中,哪种不属于分析弹性力学的基本假设(B有限变形假设)20下列关于三角形单元说法中哪种是错误的(C在单元的公共边上应力和应变的值是连续的)21下列关于矩形单元的说法哪项是错误的(D其形函数是线形的)22应用圣维南原理简化边界条件时,静力等效是指前后的力系的(D主矢量相同,对于同一点的主矩也相同)24描述同一点的应力状态需要的应力分量是(C6个)25在选择多项式作为单元的位移模式时。
江西理工大学研究生考试试卷一、 简答题(共40分,每题10分)1. 论述单元划分应遵循的原则。
2. 说明形函数应满足的条件。
3. 说明四边形等参数单元中“等参数”的含义,即为什么要引入等参数单元。
4. 阐述边界元法的主要优缺点。
二、 计算题(共60分,每题20分)1.一杆件如图3所示,杆件上方固定后,在下方受垂直向下的集中力作用,已知:杆件材料的杨氏模量2721/100.3in lbf E E ⨯==,截面积2125.5in A =,2275.3in A =,长度in L L 1221==,集中力lbf P 100=,用有限元方法求解B 点和C 点位移。
备注:(1)1lbf(磅力,libraforce )=。
(2)杨氏模量、弹性模量、Young 氏弹性模量具有相同含义(10分)2.如图2t=1m ,载荷F=20KN/m ,设泊松比μ=015分)3.图示结点三角形单元的q ,单元厚度为t ,求单元的等效结点荷载。
学院专业学号姓名 y图3一、简答题1.答:1)合理安排单元网格的疏密分布2)为突出重要部位的单元二次划分3)划分单元的个数4)单元形状的合理性5)不同材料界面处及荷载突变点、支承点的单元划分6)曲线边界的处理,应尽可能减小几何误差7)充分利用结构及载荷的对称性,以减少计算量2.答:形函数应满足的三个条件:a.必须能反映单元的刚体位移,就是位移模式应反映与本单元形变无关的由其它单元形变所引起的位移。
b.能反映单元的常量应变,所谓常量应变,就是与坐标位置无关,单元内所有点都具有相同的应变。
当单元尺寸取小时,则单元中各点的应变趋于相等,也就是单元的形变趋于均匀,因而常量应变就成为应变的主要部分。
c.尽可能反映位移连续性;尽可能反映单元之间位移的连续性,即相邻单元位移协调。
3.答:含义:所谓的等参数单元,就是在确定单元形状的插值函数和确定单元位移场的插值函数中采用了完全相同的形函数。
意义:构造出一些曲边地高精度单元,以便在给定地精度下,用数目较少地单元,解决工程实际地具体问题。
![[精选]有限元考试试题及答案——第一组资料](https://uimg.taocdn.com/020e6af5dd3383c4bb4cd2cd.webp)
有限元考试试题及答案一、简答题(5道,共计25 分)。
1. 有限单元位移法求解弹性力学问题的基本步骤有哪些?(5 分)答:(1)选择适当的单元类型将弹性体离散化;(2)建立单元体的位移插值函数;(3)推导单元刚度矩阵;(4)将单元刚度矩阵组装成整体刚度矩阵;(5)代入边界条件和求解。
2. 在划分网格数相同的情况下,为什么八节点四边形等参数单元精度大于四边形矩形单元?(5 分)答:在对于曲线边界的边界单元,其边界为曲边,八节点四边形等参数单元边上三个节点所确定的抛物线来代替原来的曲线,显然拟合效果比四边形矩形单元的直边好。
3. 轴对称单元与平面单元有哪些区别?(5 分)答:轴对称单元是三角形或四边形截面的空间的环形单元,平面单元是三角形或四边形平面单元;轴对称单元内任意一点有四个应变分量,平面单元内任意一点非零独立应变分量有三个。
4. 有限元空间问题有哪些特征?(5 分)答:(1)单元为块体形状。
常用单元:四面体单元、长方体单元、直边六面体单元、曲边六面体单元、轴对称单元。
(2)结点位移3 个分量。
(3)基本方程比平面问题多。
3 个平衡方程,6 个几何方程,6 个物理方程。
5. 简述四节点四边形等参数单元的平面问题分析过程。
(5)分)答:(1)通过整体坐标系和局部坐标系的映射关系得到四节点四边形等参单元的母单元,并选取单元的唯一模式;(2 )通过坐标变换和等参元确定平面四节点四边形等参数单元的几何形状和位移模式;(3 )将四节点四边形等参数单元的位移模式代入平面问题的几何方程,得到单元应变分量的计算式,再将单元应变代入平面问题的物理方程,得到平面四节点等参数单元的应力矩阵;(4)用虚功原理求得单元刚度矩阵,最后用高斯积分法计算完成。
二、论述题(3 道, 共计30 分)。
1. 简述四节点四边形等参数单元的平面问题分析过程。
(10 分)答:(1)通过整体坐标系和局部坐标系的映射关系得到四节点四边形等参单元的母单元,并选取单元的唯一模式;(2)通过坐标变换和等参元确定平面四节点四边形等参数单元的几何形状和位移模式;(3)将四节点四边形等参数单元的位移模式代入平面问题的几何方程,得到单元应变分量的计算式,再将单元应变代入平面问题的物理方程,得到平面四节点等参数单元的应力矩阵;(4)用虚功原理求得单元刚度矩阵,最后用高斯积分法计算完成。
有限元考试试题有限元考试试题在工程学领域中,有限元分析是一种常用的数值计算方法,用于解决结构力学、热传导、流体力学等问题。
有限元方法的应用广泛,因此在相关领域中的考试中,有限元试题是非常重要的一部分。
本文将探讨一些有限元考试试题,以帮助读者更好地理解和应用这一方法。
1. 问题描述:一根长度为L的杆件,两端固定,如何确定杆件上各个位置的位移?解答:这是一个典型的弹性力学问题,可以通过有限元方法进行求解。
首先,将杆件分割成若干个小单元,每个小单元内部的位移近似为线性。
然后,根据杆件的边界条件,建立相应的刚度矩阵和载荷向量。
最后,通过求解线性方程组,得到杆件上各个位置的位移。
2. 问题描述:如何确定一个结构的应力分布情况?解答:有限元分析可以用来计算结构的应力分布情况。
首先,将结构分割成若干个小单元,每个小单元内部的应力近似为线性。
然后,根据结构的边界条件和加载情况,建立相应的刚度矩阵和载荷向量。
最后,通过求解线性方程组,得到结构上各个位置的应力分布情况。
3. 问题描述:如何确定一个结构的固有频率?解答:固有频率是指结构在没有外界激励下自由振动的频率。
有限元分析可以用来计算结构的固有频率。
首先,将结构分割成若干个小单元,每个小单元内部的位移近似为线性。
然后,根据结构的边界条件,建立相应的刚度矩阵和质量矩阵。
最后,通过求解特征值问题,得到结构的固有频率和相应的振型。
4. 问题描述:如何考虑非线性材料的影响?解答:有限元分析可以考虑非线性材料的影响。
在材料的应力-应变关系中,通常存在非线性现象,如材料的屈服、硬化、蠕变等。
为了考虑这些非线性现象,可以采用增量形式的有限元分析方法。
在每个增量步骤中,根据当前应力状态和材料的非线性特性,更新刚度矩阵和载荷向量。
通过迭代求解,可以得到结构的非线性响应。
5. 问题描述:如何考虑流体结构耦合问题?解答:有限元分析可以考虑流体结构耦合问题。
在流体结构耦合问题中,结构的变形会影响流体的流动,而流体的流动又会对结构施加载荷。
一、20分)(×) 1. 节点的位置依赖于形态,而并不依赖于载荷的位置( √ ) 2. 对于高压电线的铁塔那样的框架结构的模型化处理使用梁单元(×) 3. 不能把梁单元、壳单元和实体单元混合在一起作成模型( √ ) 4. 四边形的平面单元尽可能作成接近正方形形状的单元(×) 5. 平面应变单元也好,平面应力单元也好,如果以单位厚来作模型化处理的话会得到一样的答案(×) 6. 用有限元法不可以对运动的物体的结构进行静力分析( √ ) 7. 一般应力变化大的地方单元尺寸要划的小才好(×) 8. 所谓全约束只要将位移自由度约束住,而不必约束转动自由度( √ ) 9. 同一载荷作用下的结构,所给材料的弹性模量越大则变形值越小( √ ) 10 一维变带宽存储通常比二维等带宽存储更节省存储量。
二、填空(20 分)1.平面应力问题与薄板弯曲问题的弹性体几何形状都是薄板,但前者受力特点是:平行于板面且沿厚度均布载荷作用,变形发生在板面内;后者受力特点是:垂直于板面的力的作用,板将变成有弯有扭的曲面。
2 .平面应力问题与平面应变问题都具有三个独立的应力分量:σx,σy,τxy ,三个独立的应变分量:εx,εy,γxy,但对应的弹性体几何形状前者为薄板,后者为长柱体。
3.位移模式需反映刚体位移,反映常变形,满足单元边界上位移连续。
4 .单元刚度矩阵的特点有:对称性,奇异性,还可按节点分块。
5.轴对称问题单元形状为:三角形或四边形截面的空间环形单元,由于轴对称的特性,任意一点变形只发生在子午面上,因此可以作为二维问题处理。
6.等参数单元指的是:描述位移和描述坐标采用相同的形函数形式。
等参数单元优点是:可以采用高阶次位移模式,能够模拟复杂几何边界,方便单元刚度矩阵和等效节点载荷的积分运算。
7.有限单元法首先求出的解是节点位移,单元应力可由它求得,其计算公式为} = [D][B]6}e 。
有限元考试复习资料(含习题答案)1试说明用有限元法解题的主要步骤。
(1)离散化:将一个受外力作用的连续弹性体离散成一定数量的有限小的单元集合体,单元之间只在结点上互相联系,即只有结点才能传递力。
(2)单元分析:根据弹性力学的基本方程和变分原理建立单元结点力和结点位移之间的关系。
(3)整体分析:根据结点力的平衡条件建立有限元方程,引入边界条件,解线性方程组以及计算单元应力。
(4)求解方程,得出结点位移(5)结果分析,计算单元的应变和应力。
2.单元分析中,假设的位移模式应满足哪些条件,为什么?要使有限元解收敛于真解,关键在于位移模式的选择,选择位移模式需满足准则:(1)完备性准则:(2)连续性要求。
P210面简单地说,当选取的单元既完备又协调时,有限元解是收敛的,即当单元尺寸趋于0时,有限元解趋于真正解,称此单元为协调单元;当单元选取的位移模式满足完备性准则但不完全满足单元之间的位移及其导数连续条件时,称为非协调单元。
3.什么样的问题可以用轴对称单元求解?在工程问题中经常会遇到一些实际结构,它们的几何形状、约束条件和外载荷均对称某一固定轴,我们把该固定轴称为对称轴。
则在载荷作用下产生的应力、应变和位移也都对称此轴。
这种问题就称为轴对称问题。
可以用轴对称单元求解。
4.什么是比例阻尼?它有什么特点?其本质反映了阻尼与什么有关?答:比例阻尼:由于多自由度体系主振型关于质量矩阵与刚度矩阵具有正交性关系,若主振型关于阻尼矩阵亦具有正交性,这样可对多自由度地震响应方程进行解耦分析。
比例阻尼的特点为具有正交性。
其本质上反应了阻尼与结构物理特性的关系。
5.何谓等参单元?等参单元具有哪些优越性?①等参数单元(简称等参元)就是对坐标变换和单元内的参变量函数(通常是位移函数)采用相同数目的节点参数和相同的插值函数进行变换而设计出的一种单元。
①优点:可以很方便地用来离散具有复杂形体的结构。
由于等参变换的采用使等参单元特性矩阵的计算仍在单元的规则域内进行,因此不管各个积分形式的矩阵表示的被积函数如何复杂,仍然可以方便地采用标准化的数值积分方法计算。
一、如图所示的1D 杆结构,试用取微单元体的方法建立起全部基本方程和边界条件,并求出它的所有解答。
注意它的弹性模量为E 、横截面积A解:如图1.1所示的1D 杆结构,其基本变量为 位移 x u 应变 x ε 应力 x σ取微单元体Adx ,其应力状态如图1.2,由泰勒展开式知()⋅⋅⋅⋅⋅+∂∂+⋅∂∂+=+22221dx x dx x dx x x x x σσσσ略去2阶以上的商阶微量知()dx xdx x xx ⋅∂∂+=+σσσ 由力的平衡知0=∑i x :0=-⎪⎭⎫ ⎝⎛∂∂+A A dx x x x x σσσ即力的平衡方程为:⋅⋅⋅⋅=0dxd xσ① 位移由图1.3知(泰勒展开,略去商阶微量)()dx xu u dx x u xx ⋅∂∂+=+ dxu dxdxdx u dx x uu ABABB A xx x x x ∂=-+-∂∂+=-=∴)(''ε应变 即几何方程为:⋅⋅⋅⋅=dxdu xx ε② 根据虎克定律知⋅⋅⋅⋅⋅⋅⋅=⋅=dxdu E E xx x εσ③ 由①、②、③知该1D 杆的基本方程为⎪⎪⎪⎩⎪⎪⎪⎨⎧====dx du E E dx du dx d x x xx xxεσεσ0 在节点1时位移:00==x x u 在节点2时应力:APlx x==σ即其边界条件为00==x x u on u SAPlx x==σ on P S 由①式知⋅⋅⋅⋅⋅=0c x σ ④ ④代入③解得:dxdu Ec x=0 ⋅⋅⋅⋅⋅⋅⋅+=10c x Ec u x ⑤ 0c 、1c 为待定系数结合边界条件知⎪⎪⎩⎪⎪⎨⎧==+A P c c x Ec 010解知得APc =0,01=c ∴⎪⎪⎪⎩⎪⎪⎪⎨⎧==⋅==EA P E x EA P u A P x xx x σεσ二、设平面问题中的应力问题y a x a a x 321++=σy a x a a y 654++=σ y a x a a xy 987++=τ其中i a (1、2、………9)为常数,令所有体积力为零,对下面特殊情况说明平衡是否满足?为什么?或者i a 之间有什么关系才满足平衡。
第1章 杆件结构1.1 单元刚度如何叠加成结构的整体刚度矩阵?为什么这样叠加?如何从刚度矩阵的物理意义去理解此叠加关系?叠加成的整体刚度矩阵又有什么特点?答:(1)首先对杆件结构进行自然离散,并对其进行节点编号和单元编号,然后通过坐标转换公式将局部坐标系下的单元刚度矩阵转换为整体坐标系下的单元刚度矩阵。
将所得的单元刚度矩阵按节点编号进行组装,即可形成整体刚度。
(2)这样的叠加方法条理清晰,便于电脑程序编程,分块进行,效率较高,且尤其适用于大量杆件结构体系,将所有的计算程序化后,大大节省了时间,并且精度较高。
(3)刚度矩阵的物理意义是表示结构或构件单元在单位位移或变形下所能承受的力的大小。
通过单元刚度矩阵建立单元节点力与节点位移之间的关系,通过整体刚度矩阵建立所受外荷载与整体位移之间的关系。
通过单元刚度矩阵叠加构建整体刚度矩阵,则建立起了结构整体外荷载与整体位移之间的方程,进而通过求得的整体位移进一步求出单元之间的节点位移,并最终求得各单元之间的节点力。
(4)特点:1)对称性。
由于杆单元的单刚是对称矩阵,则由它们集成的总刚也具有对称性。
2)奇异性。
即无论是单刚还是总刚都是奇异的,它们不存在逆阵。
3)存在相当数量的零元素。
由于杆系结构的特点,一个节点可能只连接少数几个单元,因此可能与周围邻近的几个节点之间存在非零的元素。
1.2 如图所示的圆杆,由两个不同截面的杆件(1)与(2)组成,在节点1,2,3上作用有轴向节点载荷1Q 、2Q 、3Q 而平衡。
试写出3个轴向载荷与节点的轴向位移1u 、2u 、3u 之间的矩阵关系。
解:杆件1的单元刚度矩阵为:[]1111111EA k l -⎡⎤=⎢⎥-⎣⎦;杆件2的单元刚度矩阵为:[]2221111EA k l -⎡⎤=⎢⎥-⎣⎦; 结构的整体刚度矩阵为:1111111112112211222122111211222221222222EA EA l l k k EA EA EA EA K k k k k l l l l k k EA EA l l ⎡⎤-⎢⎥⎢⎥⎡⎤⎢⎥⎢⎥=+=-+-⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎢⎥-⎢⎥⎣⎦而又12l l L ==,所以11112222A A E K A A A A L A A -⎡⎤⎢⎥=-+-⎢⎥⎢⎥-⎣⎦令节点位移向量为{}123,,Tu u u δ=,节点力为{}123,,TF Q Q Q =,从而可得3个轴向载荷与节点的轴向位移其关系为11112112223223Q A A u E Q A A A A u L Q A A u -⎧⎫⎡⎤⎧⎫⎪⎪⎪⎪⎢⎥=-+-⎨⎬⎨⎬⎢⎥⎪⎪⎪⎪⎢⎥-⎩⎭⎣⎦⎩⎭1.3 如图所示为三角桁架,已知25/101.2mm N E ⨯=,两直边的长度m l 1=,各杆的截面积21000mm A =,求此结构的整体刚度矩阵[]K ,若节点的编号改变后,问[]K 的有无变化?解:杆件的单元刚度矩阵为:[]1111ii iEA k l -⎡⎤'=⎢⎥-⎣⎦,从而可得各个单元在局部坐标系下的单元刚度矩阵为:[]11111EA k l -⎡⎤'=⎢⎥-⎣⎦;[]21111EA k l -⎡⎤'=⎢⎥-⎣⎦;[]31111k -⎡⎤'=⎢⎥-⎣⎦平面杆单元坐标转置矩阵:cos sin cos sin T αααα⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦,而又00012390045ααα===-、和,从而各个单元的坐标转置矩阵分别为:10101T ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦;21010T ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥⎣⎦;3222T ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎢-⎢⎣⎦根据上面给出的坐标转置矩阵,可得各个单元在整体坐标系下的单元刚度矩阵为[][]1111000000101101000101001100010000010101T EA EA k T k T l l ⎡⎤⎡⎤⎢⎥⎢⎥--⎡⎤⎡⎤'⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎢⎥⎢⎥-⎣⎦⎣⎦[][]2222101010001110000000011100101010000000T EA EA k T k T l l -⎡⎤⎡⎤⎢⎥⎢⎥-⎡⎤⎡⎤'⎢⎥⎢⎥===⎢⎥⎢⎥⎢⎥⎢⎥--⎣⎦⎣⎦⎢⎥⎢⎥⎣⎦⎣⎦[][]3333101111101111001111011100111111011111T k T k T --⎡⎤⎡⎤⎢⎥⎢⎥-----⎡⎤⎡⎤'⎥⎢⎥===⎢⎥⎢⎥⎥⎢⎥----⎣⎦⎣⎦⎥⎢⎥---⎣⎦⎣⎦令节点位移向量为{}112233,,,,,Tu v u v u v δ=,节点力为{}112233,,,,,Tx y x y x y F q q q q q q =,按照整体刚度矩阵的拼装原则,可得[]1010000100011010000011 EAKl-⎡⎤⎢⎥-⎢⎥⎢⎥-+⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥-⎢⎥⎣⎦若节点的编号改变后,[]K会发生变化,但是并不影响最终的计算结果。
1、弹性力学与材料力学主要不同在于:研究方法。
2、利用Ansys进行结构分析时,结果文件是什么文件:jobname.rst文件。
3、在Ansys单元库中,Plane42属于结构实体单元。
4、在一个分析中可能有多个材料特性组,Ansys通过独特的(C )来识别每个材料的特性组。
A.特性B.说明C. 参考号D.方法5、载荷包括所有边界条件以及外部或者内部的作用效应,下列不属于Ansys载荷的是( D )。
A. DOF约束B.力C.体载荷D.应力【解析】:应力是结果,不是条件。
6、(B )什么要求面或者体有规则的形状,即必须满足一定的准则。
A.自由网格B.映射网格C. Sweep网格D.其他7、什么样的载荷独立于有限元网格,即可以改变单元网格而不影响施加的载荷( C )。
A.阶跃载荷B.有限元模型载荷C.实体模型载荷D.斜坡载荷8、有限元法首先把求解出的解是(D ),单元应变和应力都可以由它来求得。
A.节点坐标B.节点自由度C.节点载荷D.节点位移9、下列不属于Ansys产品当中求解联立方程的方法是(C )。
A.稀疏矩阵直接解法B.直接解法C.变分法D.雅可比共轭梯度法10、下列不属于/postl显示的图形类别的是(B )。
A.等直线图B.灰度图C.形状变形图D.矢量图11、对二维桁架进行强度校核时,选择的单元类型是(C )。
A. plane82B. Beam3C. Link2DSPrlD. Shell6312、5为板的厚度,b为长度的最小值,当满足1/80 -1/100 <5 /b < 1/5-1/8时,这样的板属于( B )。
A.薄膜B.薄板C.厚板D.壳13、下列哪个布尔运算的结果是由每个初始输入的图元的共同部分形成的新图元(A)A.交运算B.加运算C.减运算D.分割14、在整个有限元分析过程中,离散化是分解的基础。
15、典型的Ansys文件包括:数据库文件,日志文件,结果文件。
16、Ansys提供两种工作方法:人机交互方式(GUI),命令流输入方式(Batch 方式)。
例 8-1:E ,A ,L ,s σ 杆I 弹塑性; 杆II 弹性。
求s AF σ3=下2点位移。
解:(1)理论解在荷载s A F σ3=作用下,杆I 屈服而有内力(拉力)S A N σ=1,杆II 内力(压力)为s II A N σ2=,中点2位移δ取决于杆II 的变形,即*===∆=δσσδ22)2(EL AE L A l S S II式中E Ls σδ=*(屈服位移)(2)直接迭代法杆I 和杆II 的刚度分别为⎩⎨⎧=**≤〉)()(δδδδδσL EAAI S k L EA k II =①迭I 迭代步迭代从*=δδ0开始,这时有L EAk k K II I 20=+=*-====δσσδ5.15.123101EL L EA A F K S S②第2迭代步杆I 进入塑性,有L EA A k s I 67.01==δσ杆Ⅱ完全弹性,刚度不变。
因此,总刚为L EAk k K II I 67.11=+=*-====δσσδ8.18.167.13112E L LEA A F k S s 整个迭代过程见表8-1。
表8-1 直接迭代法各次迭代结果(3)切线刚度法杆Ⅰ和杆Ⅱ的切线刚度分别为⎩⎨⎧=**≤〉)()(0δδδδLEAI k L EA k II =①第1迭代步初始状态时,00=δ,杆Ⅰ,Ⅱ中应力、应变均匀为零。
总刚为:L EAk k K T TI T 21=+=由F K T -=δψ,得S A σψ30-=由n Tn n K ψδ1--=∆得,*=--=∆δσδ5.1)3(10S A L由式n n n δδδ∆+=+1得,s δδ5.11=杆中应力:S SI σσσσ5.111-==杆中内力:S SI A N A N σσ5.111-==②第2迭代步由于杆I 已进入塑性,杆Ⅱ仍处弹性,总刚:L EAk k K TIITI T =+=2由F K T -=δψ,得S S S A A A σσσψ5.035.21-=-=由n Tn n K ψδ1--=∆得,*=--=∆δσδ5.0)5.0(11S A LEA由式n n n δδδ∆+=+1得,*=∆+=σδδδ0.2112杆中应力:S II SI A N A N σσ0.222-==检验F K T -=δψ,有030.32=-=S S A A σσψ迭代平衡。