基于stm32的人形机器人制作
- 格式:doc
- 大小:653.24 KB
- 文档页数:11
基于STM32的家庭服务机器人系统设计家庭服务机器人是一种能够为家庭提供多样化服务的智能机器人。
基于STM32的家庭服务机器人系统设计是通过使用STM32微控制器来控制机器人的功能和行为。
该系统设计主要包括硬件设计和软件设计两个部分。
硬件设计:1.外壳设计:根据实际需要,设计一个坚固、美观的外壳,以保护机器人的内部电路和组件。
2.电源设计:选用适当的电源模块,以提供机器人所需的电力,并确保电源输入的稳定性。
3.传感器:通过使用各种传感器,如红外线传感器、声音传感器和图像传感器等,以获取周围环境的信息。
4.电机和驱动器:安装适当的电机和驱动器,以控制机器人的运动和姿态。
5.显示器和音响:装配合适的显示器和音响,以提供机器人和用户之间的交互界面。
6.通信模块:集成适当的通信模块,如Wi-Fi或蓝牙模块,以实现机器人与其他设备的通信。
软件设计:1.系统运行:首先需要编写机器人的控制程序,以确保机器人的运行和行为符合设计要求。
2.感知与导航:使用传感器数据来定位并建立机器人的内部地图,从而实现机器人的感知和自主导航功能。
3.语音和图像处理:使用语音识别和图像处理算法,使机器人能够理解人类的语言和识别人脸、物体等图像信息。
4.任务执行:根据用户的需求和指令,编写机器人执行各种任务的程序,如打扫、煮饭、看护等。
5.用户界面:设计易于操作和友好的用户界面,使用户能够与机器人进行交互,并向机器人提供指令和反馈。
6.智能学习:利用机器学习算法,不断提高机器人的学习能力和智能水平,使其能够根据用户的习惯和反馈进行自主学习和优化。
总结起来,基于STM32的家庭服务机器人系统设计包括硬件设计和软件设计两个部分,通过适当的硬件模块和程序编写,实现机器人的感知、导航、语音识别、图像处理和任务执行等功能,提供多样化的家庭服务。
同时,通过不断的学习和优化,使机器人能够更好地适应用户的需求,为家庭提供更为便捷和智能化的服务。
基于STM32F407的双足机器人双足机器人是一种模仿人类步行方式的机器人,它的动作更加灵活自然,能够适应各种复杂的环境和地形。
在现代科技的发展下,双足机器人已经被广泛应用于教育、娱乐和工业等领域。
而基于STM32F407的双足机器人则是一种新型的机器人,它利用STM32F407单片机搭建控制系统,具有高性能和低功耗的特点,成为了双足机器人中的一个重要组成部分。
一、STM32F407STM32F407是意法半导体公司推出的一款高性能ARM Cortex-M4内核的微控制器,具有丰富的外设和强大的性能优势。
它集成了丰富的外设,包括ADC、DAC、PWM、USART、I2C、SPI、CAN等,适用于各种复杂的应用场景。
STM32F407还具有低功耗和高性能的特点,能够满足双足机器人对于控制系统的要求。
基于STM32F407的双足机器人控制系统由STM32F407单片机、电机驱动器、传感器模块、姿态估计算法等组成。
STM32F407单片机作为控制核心,负责控制双足机器人的动作、平衡和姿态调整等功能。
电机驱动器则用于控制双足机器人的步态和速度,传感器模块用于感知周围环境,姿态估计算法用于实时估计双足机器人的姿态和状态。
1. 高性能:基于STM32F407的双足机器人具有较高的性能优势,能够实现复杂的控制算法和运动规划,从而实现更加灵活和稳定的步行动作。
2. 低功耗:STM32F407单片机具有低功耗的特点,能够为双足机器人提供可靠的电力支持,从而延长机器人的工作时间。
3. 灵活性:基于STM32F407的双足机器人具有较高的灵活性和可扩展性,能够根据不同的应用场景进行自由组合和调整,从而适应不同的任务需求。
1. 教育领域:基于STM32F407的双足机器人可以作为教育工具,用于教学生学习机器人控制和运动规划等知识,激发学生对科学和技术的兴趣。
2. 娱乐领域:基于STM32F407的双足机器人可以作为娱乐机器人,进行各种有趣的动作表演和互动,提供新颖的娱乐体验。
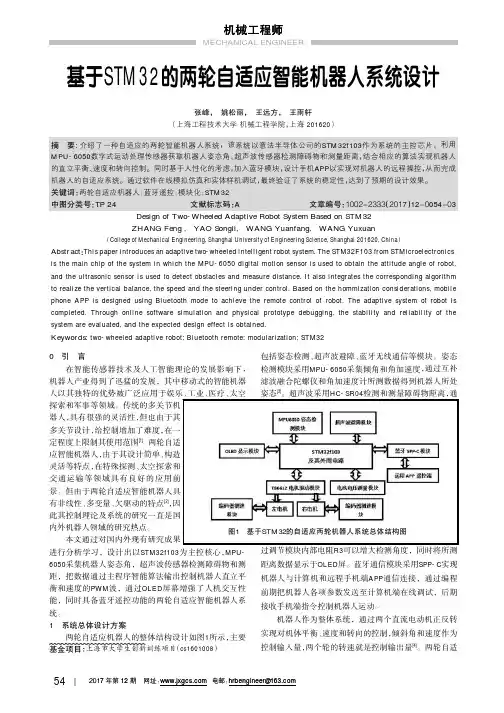
2017年第12期网址: 电邮:hrbengineer@基于STM32的两轮自适应智能机器人系统设计张峰,姚松丽,王远方,王雨轩(上海工程技术大学机械工程学院,上海201620)摘要:介绍了一种自适应的两轮智能机器人系统,该系统以意法半导体公司的STM32f103作为系统的主控芯片,利用MPU-6050数字式运动处理传感器获取机器人姿态角、超声波传感器检测障碍物和测量距离,结合相应的算法实现机器人的直立平衡、速度和转向控制。
同时基于人性化的考虑,加入蓝牙模块,设计手机APP 以实现对机器人的远程操控,从而完成机器人的自适应系统。
通过软件在线模拟仿真和实体样机调试,最终验证了系统的稳定性,达到了预期的设计效果。
关键词:两轮自适应机器人;蓝牙遥控;模块化;STM32中图分类号:TP 24文献标志码:A 文章编号:1002-2333(2017)12-0054-03Design of Two-Wheeled Adaptive Robot System Based on STM32ZHANG Feng ,YAO Songli,WANG Yuanfang,WANG Yuxuan(College of Mechanical Engineering,Shanghai University of Engineering Science,Shanghai 201620,China )Abstract 院This paper introduces an adaptive two-wheeled intelligent robot system.The STM32F103from STMicroelectronicsis the main chip of the system in which the MPU-6050digital motion sensor is used to obtain the attitude angle of robot,and the ultrasonic sensor is used to detect obstacles and measure distance.It also integrates the corresponding algorithm to realize the vertical balance,the speed and the steering under control.Based on the hommization considerations,mobile phone APP is designed using Bluetooth mode to achieve the remote control of robot.The adaptive system of robot iscompleted.Through online software simulation and physical prototype debugging,the stability and reliability of the system are evaluated,and the expected design effect is obtained.Keywords:two-wheeled adaptive robot;Bluetooth remote;modularization;STM32引言在智能传感器技术及人工智能理论的发展影响下,机器人产业得到了迅猛的发展,其中移动式的智能机器人以其独特的优势被广泛应用于娱探索和军事等领域。

基于STM32F407的双足机器人双足机器人是一种模拟人类行走的机器人,可以实现步行、跑步、跳跃等动作。
本文将介绍基于STM32F407的双足机器人的设计原理和实现过程。
我们需要设计机器人的硬件部分。
双足机器人需要具备平衡能力和步行能力。
为了实现这一目标,我们需要在两条腿上安装舵机和传感器。
舵机可以控制腿部的运动,传感器可以检测机器人的倾斜角度和腿部的位置。
基于STM32F407的双足机器人主控制器需要具备较强的计算能力和控制能力。
STM32F407是一款高性能的ARM Cortex-M4微控制器,具有高速的运算能力和多种外设接口。
我们可以将STM32F407作为机器人的主控制器。
接下来,我们需要设计机器人的软件部分。
双足机器人的软件主要包括运动控制算法和姿态控制算法。
运动控制算法用于控制舵机的转动角度,从而实现机器人的步行动作。
姿态控制算法用于保持机器人的平衡,根据传感器的测量值进行控制。
在编程上,我们可以使用Keil MDK进行开发。
Keil MDK是一款功能强大的集成开发环境,可以进行嵌入式软件的开发和调试。
我们可以使用C/C++语言编写机器人的软件,利用STM32F407的外设库函数进行控制。
我们需要对机器人进行测试和调试。
在测试阶段,我们可以通过连接电脑和机器人,通过串口通信进行调试。
我们还可以使用仿真软件进行虚拟测试,以提前检测和解决潜在的问题。
基于STM32F407的双足机器人可以应用于多个领域,例如教育、娱乐和服务机器人等。
通过不断改进和优化,双足机器人的性能和功能将得到进一步提升,为人们带来更多便利和乐趣。
基于STM32F407的双足机器人是一种具有广泛应用前景的机器人系统。
它结合了硬件设计和软件算法,能够实现人类步行动作,并具备平衡能力。
这为机器人技术的发展和应用带来了更多可能性。
摘要:变形机器人是机器人领域中新兴起的一个研究方向,同时也是当前机器人学研究领域的一个热点和难点。
本课题参照人体骨骼结构并综合考虑运动中模块间的碰撞、结构变化步数以及车型状态等因素,为机器人设计精确构型。
基于机器人结构设计,详细探讨本项目变形机器人人车变形过程,具体展示不同构型的特点及相互之间的转换和衔接,打破变形机器人研究局限,推进本领域关键技术的突破。
本文我们主要对机电一体化产品-变形金刚机器人进行了系统设计,该变形机器人旨在满足四五岁儿童对于变形金刚机器人玩具的需求,可在战车和机器人之间变换,并且各变形处的机构变换设计巧妙,变换的多变性、趣味性和实用性都非常高,在战车和变形后机器人的外观上极为逼真、酷炫,对儿童极具吸引力。
我们首先对市场前景进行了调查和分析,之后查阅相关资料并进行分析,随后进行机器人方案设计及具体的机械结构设计,并绘制机器人总装图和关键零部件图,然后进行传感与控制方案设计,包括硬件与软件设计,试验测试,最后编制课程设计说明书。
本文对于硬件电路的连接和软件控制方面进行了详细的阐明,完成变形金刚机器人变形、行走的功能,并实现无线通讯功能。
目录第一章方案设计 (6)1 机械结构方案设计 (6)2 驱动方案选择 (7)2.1 电机的选择 (7)3 传感器的选择 (7)4 结构的合理性和参数的合理性 (8)第二章动作的总体规划详细方案 (9)1 人形态下的行走设计 (9)2 车形态下的运动设计 (9)3 人车转换的变形设计 (9)第三章软件系统设计 (10)1 软件系统总体方案 (10)2 控制方案与流程 (11)第四章程序 (12)第五章项目心得 (14)第一章方案设计1机械结构方案设计本次任务主要对我们的机电一体化产品-变形金刚机器人进行了系统设计,实现自动变形。
外部机械结构包括作为战车整体外观的躯壳和车顶,用于连接躯壳以及车顶的支架,与支架连接组成战车车头的两个车头灯以及引擎盖,与支架上端连接的头部,与支架中部连接的两条手臂以及与支架下端连接的两条腿,安装于二条手臂上的前轮以及安装于二条腿上的后轮。
基于STM的轮式移动机器人的研制作者:张健蒙靓来源:《电子技术与软件工程》2018年第04期摘要自主移动机器人是经过内外部传感器分析外部环境与自身情况,在障碍物环境中实现对目标的自主移动,进而实现相关操作的机器人系统。
其含有单片机、传感器、通信接口以及人工智能等领域的相关技术,本文将研究的为基于STM32轮式移动机器人。
【关键词】移动机器人传感器人工智能STM32为系列微控制器,是ST公司推出的基于Cortex-M3内核处理器,其可以实现高速的运算,同时外设的配置可以带来极为优异的控制与连接能力。
具有先进的内核结构、优异的功耗控制以及性能出众的高度集成,可以作为智能移动机器人的控制芯片系统。
1 轮式移动机器人的硬件设计1.1 系统的总体方案对于轮式移动机器人的总体设计,控制系统极为重要,其是整个系统的核心。
本文设计的智能轮式移动机器人,含有障碍物检测、自主定位以及避障等功能。
依赖于这些功能,研究的控制系统含有:电源模块、微控制器模块、电机驱动模块、通讯扩展模块等。
系统的结构如图1所示。
1.2 电源系统的设计主控器的电压为+3.3V,电机驱动所需要的电源为+12V,为此选择+12V作为系统的主电源,+3.3V经过电路内部添加电源转换芯片获取。
转换芯片为LM1117进行,在输入与输出两侧添加电容,降低了电源扰动的干扰,使得系统的可靠性大幅度提升。
1.3 微控制器模块的设计本系统采用的为ST公司半导体生产的STM32芯片作为移动机器人的中央控制器,工作的频率可以达到72MHz,实现高速的运转。
内含有高速储存器,丰富的增强型I/O端口与连接两条APB总线外设,实现了对于外设备的控制与联通。
处理器含有多种低功耗模式与灵活的时钟控制模式,可以依赖于设计的需要开展合理的配置。
基于主控器STM32的最小系统硬件电路含有电源控制、复位电路、晶振电路以及JTAG 接口电路等。
对于电源控制电路,为提升转换的精确度,ADC使用的是独立电源,自动屏蔽来自印刷电路板上面的毛刺干扰。
基于STM32F407的双足机器人双足机器人是仿生型机器人的一种,与人类步态较为接近,因此在人机交互、服务机器人、医疗等领域有广泛应用。
本文介绍了基于STM32F407的双足机器人设计。
一、硬件设计1. 硬件原理图整个系统由主控板、电机驱动板、按键板、电量显示板、调试串口板、电源板等组成,如下图所示。
2. 材料清单双足机器人的材料清单主要包括:• 主控芯片:STM32F407• 电机驱动芯片:L298N• 步进电机:NEMA 17• 电源:12V、5A• 机壳:3D打印1. 系统框架整个系统采用嵌入式操作系统RTOS实现,用户可以通过触摸屏或按键操作控制双足机器人的移动、转向等动作。
2. 程序流程程序流程图如下图所示。
3. 关键算法(1)PID控制算法采用PID控制算法控制步进电机的转速,保证双足机器人移动的稳定性和平滑性。
(2)三关节反向解算算法该算法用于计算双足机器人每个关节的角度,使之达到期望角度,从而实现机器人的运动。
(3)Kinect传感器数据处理算法通过Kinect传感器获取地面深度数据,根据机器人的移动数据、机构参数、重心位置等计算机器人的倾角、速度等数据,从而实现双足机器人的平衡控制。
三、实验结果经实验,基于STM32F407的双足机器人控制系统工作稳定,运动平滑,靠墙时能自动保持平衡,转向时稳定性高,可靠性强。
四、结论本设计基于STM32F407的双足机器人控制系统,实现了双足机器人的运动控制。
通过Kinect传感器获取地面深度数据,根据机器人的移动参数计算机器人的倾角、运动速度等,从而实现机器人的平衡控制。
该设计为双足机器人系统提供了一个较为稳定、高可靠性的控制平台,并为双足机器人的应用提供了有力支持。
1 引言各行各业中,电力产业对人们的生产生活起着至关重要的作用。
其中变电站是电力输送和电能分配中的重要环节,不仅控制着电流和电压的大小、方向,还承担着将电能分配到千家万户的重任[1]。
随着变电站规模的不断扩大,巡检的项目和难度越来越大,采用传统人工巡检的方式,工作效率容易受到巡检人员主观经验和技术水平的限制,同时巡检人员长期工作于这样的环境下,会造成神经疲劳、精神衰弱、精神抑郁,增加中枢神经系统疾病、心脏病、心血管等疾病的患病概率。
因此,普及巡检机器人在变电站的应用,来代替巡视人员实现变电站的巡视检查,不但可节省开支,也是保障巡检工作者身体健康的现实所需[2,3]。
早在很多年前国内外的科学家们就已经开展对变电站巡检机器人的研究。
2000年加拿大科学家研制了一款轮式机器人,搭载了红外热成像仪和高清摄像头,可以实现远程操控[4];2012年梅西大学和新西兰电网公司联合研制了一基于STM32普及型变电站智能巡检机器人的设计太原科技大学电子信息工程学院 孙宏发 李昕涛 韩增强摘 要作为智能电网的核心环节,智能变电站备受关注,开发普适性巡检机器人成为推进变电站智能化的动力。
本文采用通用型嵌入式系统来构建动力系统,同时搭载高清摄像头和红外光感元件实现图像的采集;并设计运动控制算法和视觉算法,研制出巡检机器人样机,进行了室内巡航实验和爬坡稳定性实验,验证了各传感器模块和人机交互界面运行的稳定性。
实验表明,本文设计的机器人可以满足基本的运行要求,为后期研制普及型巡检机器人打下坚实的理论与实践基础。
关键词变电站;巡检机器人;电磁寻迹;卷积神经网络款搭载超声波传感器防碰撞结构且能进行高清视频和图像回传到工作后台的巡检机器人,可以实现变电站整个地形的全面巡检[5,6]。
同时,近年来国内变电站巡检机器人的研究也在如火如荼的进行。
例如2015年深圳市朗驰欣创科技股份有限公司研制出一款可以自主导航定位、自主巡航、自主充电的机器人,搭载了红外热成像和高清摄像头设备,能够实现识别设备仪表的实时参数,发现电流、电压过高导致的过热以及其他故障[7];2017年,中国亿嘉和科技有限公司推出了一款采用全自动激光定位与导航、全驱全动、可以感知到障碍物并轻松越过障碍物的全新机器人[8,9]。
基于STM32F407的双足机器人双足机器人是一种仿生机器人,它具有类似人类双足行走的能力,可以在复杂的地形环境中自主行走、保持平衡。
随着科技的不断发展,双足机器人在工业生产、救灾救援、服务业等领域有着广泛的应用前景。
本文将介绍基于STM32F407的双足机器人的设计与制作过程。
一、STM32F407介绍STM32F407是意法半导体公司推出的一款32位高性能微控制器,它采用ARM Cortex-M4内核,主频可达168MHz,具有丰富的外设资源和强大的计算能力。
STM32F407具有丰富的接口,如通用并行接口(GPI)、通用同步/异步串行接口USART)、通用串行接口GUS)、SPI、I²C、SDIO、ADC等,可以满足双足机器人在控制、通信、传感器等方面的需求。
二、双足机器人的设计思路双足机器人的设计思路是模仿人类行走的方式,通过不断调整身体姿态和腿部关节的运动来保持平衡。
在双足机器人的设计中,需要考虑机械结构、动力系统、传感系统和控制系统等多个方面。
在本设计中,我们采用STM32F407作为控制核心,利用其丰富的接口资源和强大的计算能力,配合相关模块和传感器,完成双足机器人的设计与制作。
三、双足机器人的硬件设计1. 机械结构设计双足机器人的机械结构设计是整个项目的基础,它直接影响机器人的稳定性和可行性。
我们采用了轻质材料制作机械结构,并通过CAD软件进行设计,确保结构的合理性和稳定性。
2. 动力系统设计双足机器人的动力系统设计包括电机、电机驱动器、电源系统等部分。
我们选用了高效的直流无刷电机作为动力源,并配合合适的电机驱动器和电源系统,保证机器人的稳定性和运动性能。
3. 传感系统设计双足机器人的传感系统设计包括姿态传感器、接触传感器、视觉传感器等部分。
在本设计中,我们利用了三轴加速度计和陀螺仪传感器来获取机器人的姿态信息,利用触摸传感器来检测机器人的接触状态,同时结合视觉传感器进行环境感知和障碍物识别。
18 | 电子制作 2019年05月优越得多,仿生学就是要在工程上实现并有效地应用生物功能,生物体的结构与功能在机械设计方面给了很大启发。
机械结构的设计是完成设计的第一步,整机结构、自由度、驱动方式、传动机构等都会影响机器人的性能。
仿生设计出来的机器人不仅要满足现有的技术条件,而且要满足经济条件[1]。
我们从动物世界数百万种的生物中选取了运动行为较为简单的爬行动物,其身体结构大致可以用分为大脑和躯体两部分。
设计中的“大脑”是核心的控制单元单片机;“躯体”包含了“眼睛”(采集周围环境信息的传感器)、“心脏”(系统的供电模组),以及最为关键的“足”(舵机及其附属机械结构)。
本设计中足的设计是最具难度的,首先需要确定足的数量。
选择的因素主要包括:稳定、灵活、控制难度、复杂的传感器和可能的步态等等。
为了解决这一难题,我们从大自然中学习借鉴,通过模仿爬行动物的结构和功能原理来研制新型机械和结构并将其灵活运用到机器人的研究中去。
大多数动物的足是成对出现的,少则4只,多则成百上千只。
足的数目与其自身的稳定性成正比,足的数目越多与地面接触的面积就越大,稳定性得到提高,但是行动起来相比足少的动物显得更加笨拙。
经过比较,参考现有设计方案,最终确定足的数量为6只,兼顾稳定性的同时也考虑到了控制的简单性和运动的灵活性。
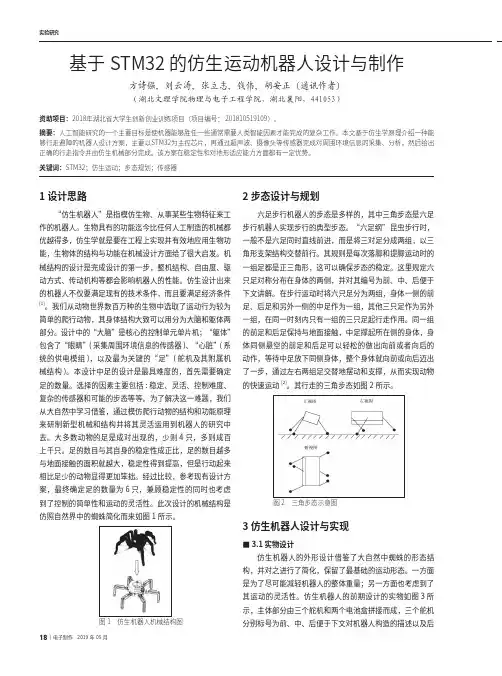
此次设计的机械结构是仿照自然界中的蜘蛛简化而来如图1所示。
图1 仿生机器人机械结构图一般不是六足同时直线前进,而是将三对足分成两组,以三角形支架结构交替前行。
其规则是每次落脚和提脚运动时的一组足都是正三角形,这可以确保步态的稳定。
这里规定六只足对称分布在身体的两侧,并对其编号为前、中、后便于下文讲解。
在步行运动时将六只足分为两组,身体一侧的前足、后足和另外一侧的中足作为一组,其他三只足作为另外一组,在同一时刻内只有一组的三只足起行走作用。
同一组的前足和后足保持与地面接触,中足撑起所在侧的身体,身体同侧悬空的前足和后足可以轻松的做出向前或者向后的动作,等待中足放下同侧身体,整个身体就向前或向后迈出了一步,通过左右两组足交替地摆动和支撑,从而实现动物的快速运动[2]。
基于STM32仿生六足机器人_毕业设计毕业设计(论文) 基于STM32仿生六足机器人学院:电子与信息工程学院专业: XXXXXXXXXXXXXXXX学号: XXXXXXXXXXX作者: XXX指导老师: XXX基于STM32仿生六足机器人电子与信息工程学院 XXXXXXXXXXXX专业作者 XXX 指导教师 XXX【摘要】在科技高速发展的信息社会,机器人在工业,军事,探测等各个领域起着越来越重要和不可替代的位置,机器人研究成为目前世界各国研究的热点。
仿生六足机器人涉及仿生学、机械学、信息技术和传感技术等众多学科,是机器人研究的一大分支。
仿生六足机器人模仿生物界爬行动物的肢体结构,具有良好的机动性和自适应能力,在军事运输、矿山开采、星球探测等众多领域具有广阔前景。
本设计采用ARM内核结构(Cortex-M3)的STM32F103RBT6为主控芯片,通过内部定时器产生脉宽调制信号,以及使用74HC138进行分时复用来控制六足机器人的关节,即18个MG955舵机。
通过BMX-02蓝牙转串口模块连接手机和机器人,实现手机蓝牙遥控。
采用UN2003A电机驱动芯片驱动步进电机,并配合红外传感器使机器人实现智能避障。
由于该机器人拥有18自由度,肢体灵活,还可实现各种类似舞蹈的特殊动作。
【关键词】仿生六足机器人;STM32F103RBT6;舵机控制目录1绪论 (1)1.1课题研究背景意义 (1)1.2仿生六足机器人的现状 (1)1.3本设计系统结构 (2)1.4本论文的组织结构 (2)2肢体结构和步态规划 (3)2.1肢体结构设计 (3)2.2步态规划 (3)2.2.1三角步态 (3)2.3本章小结 (4)3硬件设计介绍与系统各部分工作原理 (5)3.1主控芯片STM32F103RBT6简介 (5)3.2STM32F103RBT6最小系统电路 (5)3.2.1主芯片原理图 (5)3.2.2晶振电路 (6)3.2.3复位电路 (6)3.2.4下载电路 (7)3.3舵机原理与控制 (7)3.3.1舵机内部结构 (7)3.3.2舵机的工作原理错误!未定义书签。
基于STM32F407的双足机器人双足机器人是一种仿生机器人,具有双足步行能力,能够模拟人类的步态和动作。
它具有很高的灵活性和稳定性,可以适应不同的地形和环境。
基于STM32F407的双足机器人具有先进的控制系统和智能算法,能够实现复杂的动作和任务。
本文将介绍基于STM32F407的双足机器人的设计原理、控制系统和应用场景。
一、设计原理基于STM32F407的双足机器人主要由机械结构、传感器系统、控制系统和动力系统四个部分组成。
机械结构是双足机器人的骨架,它决定了机器人的外形和运动方式。
传感器系统用于感知环境和身体状态,包括视觉传感器、惯性传感器、力传感器等。
控制系统是双足机器人的大脑,它接收传感器数据并计算出相应的动作指令。
动力系统则负责执行控制系统的指令,驱动机器人进行运动。
1. 高性能处理器:STM32F407是一款高性能的32位微控制器,具有丰富的外设和强大的计算能力,能够满足双足机器人复杂的控制算法和实时运动要求。
2. 多轴驱动:双足机器人需要精确的多轴驱动来实现步行和平衡,STM32F407提供了丰富的PWM输出通道和高速定时器,能够满足机器人的驱动需求。
3. 实时通信:双足机器人需要实时地接收和发送数据,与外部设备进行通信。
STM32F407具有丰富的通信接口和高速外设,能够满足双足机器人的通信需求。
基于STM32F407的双足机器人的设计原理可以满足机器人的高性能计算和实时控制要求,为机器人的稳定步行和复杂动作提供了坚实的技术基础。
二、控制系统基于STM32F407的双足机器人的控制系统包括感知、规划和执行三个部分,实现了双足机器人的全面控制。
感知部分主要通过传感器系统获取环境信息和身体状态,包括视觉、力觉、陀螺仪等传感器,将感知到的数据传输给控制系统。
规划部分主要通过控制算法对感知数据进行处理和分析,得出接下来的运动控制指令。
执行部分主要通过动力系统执行规划好的运动控制指令,控制机器人进行步行和平衡。
www�ele169�com | 27智能应用0 引言根据资料显示,1999年中国进入老龄化社会,这20年以来我国老年人口数已从1.31亿升至2.49亿,老年人占总人口的比例达到17.9%。
从目前的趋势来看,未来中国老龄化速度会以较高斜率上升。
而人口老龄化的结果将直接导致老龄人口抚养比的不断提高继而加重劳动力的养老负担。
因此在物联网时代的大背景下,针对提升家庭安全和智能, 加强对老人看护问题,使物联网智能家庭机器人逐渐成为机器人生产制造业的主流。
为此本文设计了一款成本低廉,功能完善,性价比高,可二次开发,便于批量化生产,操作维护简单的物联网家庭智能机器人,创造适合老年人居住的舒适、便利、安全、健康的居住环境是社会发展的需要,充分体现关爱老人的情怀和理念,能很好地服务居家老人的生活起居,具有很好的推广价值。
1 系统总体设计物联网家庭智能机器人的整体结构设计分为三个部分,整体结构框图如图1所示。
图1 整体结构框图■1.1 机械结构设计机械结构部分的设计图如图2所示。
机械结构设计思路:在机器人的底盘上设计了一个可控旋转云台,云台上接机械臂进行对重物的提起,机械臂提重物的实现通过按键启动提重物模式,可通过按键控制云台调整角度、按键控制电机,带动轮轴旋转,使吊绳缠绕上升,从而提起重物。
并且在机器人上方装置了一个通过连机构杆连接可进行重叠的储物盒以便于老人存放物体。
图2 机械结构图■1.2 系统电控设计及物联网采取STM32控制电机传感器等部件,各个环境监测模块采集到的信息通过芯片的模数转换功能后通过串口与ESP8266进行通信。
ESP8266通过MQTT 协议将获取数据上报到物接入平台再由规则引擎来实现数据可视化,检测电器用电情况并实现电量合理分配。
同时LED 显示屏实时显示环境温湿度和天气情况,手机APP 端实现光照调节和室温调节。
物接入数据可视化界面如图3所示。
图3 可视化界面图2 硬件设计与实现该系统主要由控制器、传感器、WI-FI 模块和电机驱动模块组成,上电后通过控制器驱动传感器进行检测环境并将得到的数据进行处理后在LED 屏幕上显示以及通过WI-FI 模块上传到云端从而进行远端环境监测。
• 128•基于STM32的平衡机器人设计广东工业大学 黄嘉兴随着计算机技术的迅速发展及其应用优势,促进了越来越多的行业往智能化,信息化转变,也促进了以计算机技术为核心的其它技术的发展,比如嵌入式以及人工智能等新一代技术的产生。
其中嵌入式技术是人工智能技术的基础,而机器人则是它们的具体应用。
如何使用嵌入式技术来实现具有一定人工智能的机器人项目,有助于我们综合理解计算机技术并进一步了解其在机器人领域的应用。
前言:计算机是第三次工业革命的代表,其使得传统工业更加机械化和智能化,极大提升了工业生产效率和降低了生产成本,并随着计算机技术的迅速发展,计算机也越来越小型化和集成化,从最初只能用于大型工业到广泛运用于各个行业领域,其计算能力也得到大幅提升,极大地促进了整个社会往信息化,智能化发展方向发展,甚至完全改变了传统的运作模式(孙增择.RoboCup 世界杯与中国机器人大赛[J].机器人技术与应用,2010(4):7-8)。
随着晶体管的大规模应用以及高度集成化,以计算机技术为核心的嵌入式技术得到迅速发展和应用,其主要特点是:以应用为中心,以计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统(贺龙豹.竞赛用搬运机器人的设计与实现[D].南京:南京财经大学,2013)。
正是由于嵌入式技术的特点,结合人工智能在算法上的可行性,最终促进了机器人技术的迅速发展,并在工业、军事、医疗、环境等各行各业有着广泛的发展和应用,如何将嵌入式技术运用于智能机器人也成为了一个热门的研究方向(高正中,龚群英,宋森森.基于STM32 的智能平衡车控制系统设计[D ].山东科技大学电气与自动化工程学院,山东青岛266590)。
1 两轮平衡机器人简介从机器人的移动方式分,可以分为固定机器人和移动机器人,固定机器人主要指工业生产中的机械臂,移动机器人又可以分为足式机器人和轮式机器人,足式机器人有着更高要求的控制硬件及其程序算法,一般以轮式机器人居多,而轮式机器人又可以分为多轮机器人,两轮机器人,以及单轮机器人。
摘要:
变形机器人是机器人领域中新兴起的一个研究方向,同时也是当前机器人学研究领域的一个热点和难点。
本课题参照人体骨骼结构并综合考虑运动中模块间的碰撞、结构变化步数以及车型状态等因素,为机器人设计精确构型。
基于机器人结构设计,详细探讨本项目变形机器人人车变形过程,具体展示不同构型的特点及相互之间的转换和衔接,打破变形机器人研究局限,推进本领域关键技术的突破。
本文我们主要对机电一体化产品-变形金刚机器人进行了系统设计,该变形机器人旨在满足四五岁儿童对于变形金刚机器人玩具的需求,可在战车和机器人之间变换,并且各变形处的机构变换设计巧妙,变换的多变性、趣味性和实用性都非常高,在战车和变形后机器人的外观上极为逼真、酷炫,对儿童极具吸引力。
我们首先对市场前景进行了调查和分析,之后查阅相关资料并进行分析,随后进行机器人方案设计及具体的机械结构设计,并绘制机器人总装图和关键零部件图,然后进行传感与控制方案设计,包括硬件与软件设计,试验测试,最后编制课程设计说明书。
本文对于硬件电路的连接和软件控制方面进行了详细的阐明,完成变形金刚机器人变形、行走的功能,并实现无线通讯功能。
目录
第一章方案设计 (3)
1机械结构方案设计 (3)
2驱动方案选择 (4)
2.1电机的选择 (4)
3传感器的选择 (4)
4结构的合理性和参数的合理性 (5)
第二章动作的总体规划详细方案 (6)
1人形态下的行走设计 (6)
2车形态下的运动设计 (6)
3人车转换的变形设计 (6)
第三章软件系统设计 (7)
1软件系统总体方案 (7)
2控制方案与流程 (8)
第四章程序 (9)
第五章项目心得 (11)
第一章方案设计
1机械结构方案设计
本次任务主要对我们的机电一体化产品-变形金刚机器人进行了系统设计,实现自动变形。
外部机械结构包括作为战车整体外观的躯壳和车顶,用于连接躯壳以及车顶的支架,与支架连接组成战车车头的两个车头灯以及引擎盖,与支架上端连接的头部,与支架中部连接的两条手臂以及与支架下端连接的两条腿,安装于二条手臂上的前轮以及安装于二条腿上的后轮。
变形机器人的设计不同于一般人形机器人的设计。
为了实现人形状态的完备功能,机器人的构型需要依照人类运动关节的构造而设计。
本项目变形机器人采用了15个舵机实现其完整的功能。
首先是变形机器人人形基本结构的设计(如图2-1)。
腿部由6个舵机来实现人形的基本功能,保证变形机器人处于人形状态下能够自由行走,并且能够实现直走、转弯、劈叉等多个功能。
手部应用了4个舵机,能够实现手部的前举、上举等功能。
另外是胸部的设计。
当变形金刚在车形态向人形态的转换过程中,用胸部支架处两个舵机将车前身的两个轮子移动至胸前部,作为人形态的胸部的一部分,再用另外两个舵机的转动通过曲柄来带动胸部滑块的移动,完成胸部的合拢,同时挡板转动覆盖住舵机。
为保证车型机器人(如图2-2、图2-3)的实现,在机器人膝关节处加装了一对直流电机并配有防滑轮作为主动轮,而在机器人的肩部加装了一对防滑轮作为从动轮,由主动轮带动从动轮实现机器人的自由前进。
同时,在变形构型设计上既要考虑在变形过程中模块间的碰撞、一次结构改变的步数以及确保模块集合可以到达必要的位置,又要精确设计车型四轮的安装位置,以及其他构型对其变形过程所造成的影响。
图2-1 机器人人形结构设计图
图2-2 机器人车型结构正面图图2-3 机器人车型结构背面图
2驱动方案选择
2.1电机的选择
机体设计的电机有两种,一种是各个关节的驱动电机,另一种是车轮的驱动电机。
对于关节的驱动电机,要求能够转动指定的角度,且能提供一定的力矩。
车轮的驱动电机要求能够连续转动,且能够减速和加速。
根据要求并考虑到成本,关节的驱动电机选择了舵机,车轮的驱动电机选择了直流电机。
电机参数
电机种类型号参数
舵机MG995 转矩13kg/cm 重量55g
直流电机J GA25-370 20rad/s 重量80g
3传感器的选择
因为涉及到人形模式下的运动,为了增加控制精度,考虑增加陀螺仪以作为辅助考虑到精度要求和成本,选择陀螺仪的型号如下
传感器参数
型号电压体积姿态测量稳定度
4结构的合理性和参数的合理性
变形机器人所有模块的运动都基于一套几何学的原理,同时,在变形构型设计上既要考虑在变形过程中模块间的碰撞、一次结构改变的步数以及确保模块集合可以到达必要的位置,又要精确设计车型四轮的安装位置,以及其他构型对其变形过程所造成的影响。
比如在设计初期,我们就遇到了这样的问题,由于两个脚板在变形过程中会发生碰撞和干涉,修改模型和零件耗费了不少时间,因此一定要注意结构的合理性及参数的合理性。
第二章动作的总体规划详细方案
1人形态下的行走设计
根据变形金刚机器人要实现直线行走、转弯的步态控制功能,最终决定髋关节配置1个自由度,即俯仰(pitch)自由度,膝关节配置 1 个俯仰自由度,踝关节配置有1个自由度,即偏转(yaw)的自由度。
每条腿各配置 3个自由度,两条腿共 6个自由度。
步态行走时,通过腿部姿态的调整,核心思想是“先移重心后迈脚”,完成直线行走和转弯行走。
髋关节和膝关节的俯仰自由度共同协调动作可完成机器人的在径向平面内的直线行走功能;踝关节的偏转自由度协调动作可实现在侧向平面内的重心转移功能;上述关节的自由度共同协调可实现机器人的静态转弯功能。
具体动作过程即,首先脚板偏转调整重心,随后通过髋关节和膝关节的转动,完成迈腿,按此思想进行调试。
腿部结构三维图如下所示。
图3-1 腿部结构三维模型
2车形态下的运动设计
为保证车型机器人的实现,在机器人膝关节处加装了一对直流电机并配有防滑轮作为主动轮,而在机器人的肩部加装了一对防滑轮作为从动轮,由主动轮带动从动轮实现机器人的自由前进。
3人车转换的变形设计
本项目机器人变形过程中,脚踝上直流电机与舵机、膝盖舵机、腰部舵机照指令旋转,促使变形机器人身体部位前倾,根据惯性,机器人身体部位向前转动落于腿部、腰部部位接触地面、腿部呈现折叠状态。
这时,变形机器人腿关节处装有的车轮便与地面接触,使其变成车型机器人的车轮,从而实现人形到车型的状态。
接着,根据指令,轿车形态的机器人开始运动。
在实现轿车形态与双足形态的转换时,利用机器人的车门即手来做定点支撑,腿部伸直,脚板贴地,利用舵机的力度,使机器人缓缓撑起,从而得到双足的状态。
如图2-1、
图2-2所示。
第三章软件系统设计
1软件系统总体方案
选用“上位机+串口+下位机”的控制系统解决方案。
上位机控制软件的主要功能是对预定的机器人动作进行规划和位置插补,再按照一定时间和次序发送给下位机,实现机器人关节位置和速度控制;下位机主要功能是接收上位机发送的位置信号,根据信号要求产生 PWM 波,控制机器人各个关节舵机运动,使机器人按动作规划完成动作。
相应的,下位机主要由串口通信部分、电源、时钟部分、CPU 及接口部分、复位信号五部分组成。
当下位机接收数据时,采用中断方式进行接收,以保证通信的实时性,而下位机发送数据时,则通过调用发送函数完成发送功能。
在接收数据时,须先接收第一个字节的数据,以确定该数据帧占用的字节数,确定数据长度后,将关闭串行通信中断,采用查询方式接收数据,直至接收完该数据帧为止。
下位机数据接收中断服务程序的流程如图5-1所示。
图5-1 下位机数据接收中断服务程序流程图
2控制方案与流程
在实现轿车形态与双足形态的转换时,利用机器人的车门即手来做定点支撑,腿部伸直,脚板贴地,利用舵机的力度,使机器人缓缓撑起,从而得到双足的状态。
步态行走时,通过腿部姿态的调整,核心思想是“先移重心后迈脚”,完成直线行走和转弯行走。
髋关节和膝关节的俯仰自由度共同协调动作可完成机器人的在径向平面内的直线行走功能;踝关节的偏转自由度协调动作可实现在侧向平面内的重心转移功能;上述关节的自由度共同协调可实现机器人的静态转弯功能。
首先,利用舵机控制板控制腿部姿态,脚板偏转调整重心,随后通过髋关节和膝关节的转动,完成迈腿和变形,按此思想进行调试。
记录下各个舵机的参数变化,利用单片机stm32软件编程,利用无线串口模块实现无线操控。
软件流程图如下图所示。
第四章程序
部分程序如下:
单片机超时处理
单片机每隔200ms发送一次数据
单片机延时50ms返回
第五章项目心得
本次机电产品设计主要研究了变形金刚机器人,基于机器人结构设计,重点研究变形机器人人车变形的过程,参照人体骨骼结构并综合考虑运动中模块间的碰撞、结构变化步数以及车型状态等因素,为机器人设计精确构型,具体展示不同构型的特点及相互之间的转换和衔接,打破变形机器人的研究局限,推进本领域关键技术的突破,实现技术上的创新。
我们首先进行了可行性分析,方案的比较和设计,硬件和软件部分的设计,同时还进行了三维图的绘制,我们组还制作了动画的仿真,总的来说这次课程设计的任务量是比较大的。
在课设过程中大家相互讨论,方案的选择和设计的思路也最终越来越清晰。
这次课程设计对我们来说是一次挑战,之前很少参加类似的竞赛或项目,大家挤出时间,有质量的完成了课程设计,这对我们来说也是一次很好的历练。
但由于技术水平有限,本次设计仍存在一些控制上的不足,有待完善,需要进一步深入研究改进。
最后,由衷的感谢学校为我们提供的这次非常有意义的锻炼动手能力的机会,也非常感谢老师和学长们的耐心指导,我们会努力做到最好!
11。