微型计算机原理与接口技术第十章课后答案
- 格式:pdf
- 大小:241.89 KB
- 文档页数:6
微机原理与接口技术习题参考答案第一章(p20)1、参考答案:冯•诺伊曼计算机的设计思想(EDVAC方案:存储程序通用电子计算机方案):①计算机分为计算器、控制器、存储器、输入和输出装置五个部分;②计算机内采用二进制;③将程序存储在计算机内,简称“程序存储”。
其中第三点是冯•诺依曼计算机设计的精华,所以人们又把冯•诺依曼原理叫做程序存储原理,即程序由指令组成并和数据一起存放在存储器中,机器则按程序指定的逻辑顺序把指令从存储器中读出来并逐条执行,从而自动完成程序描述的处理工作。
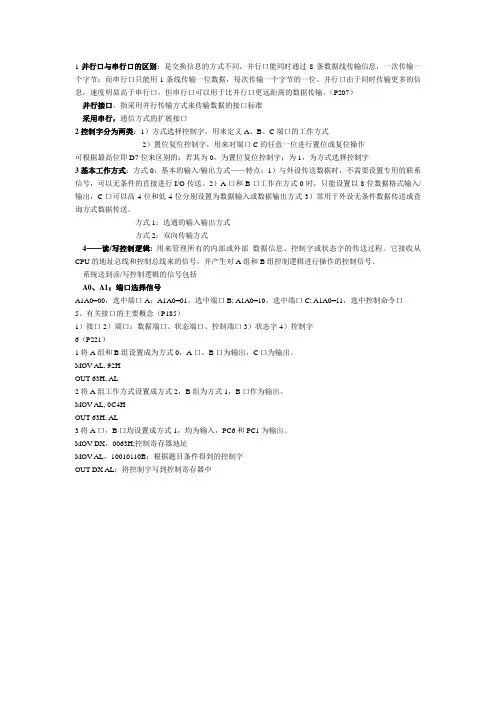
冯•诺伊曼计算机主要以运算器和控制器为中心,结构框图如下图所示。
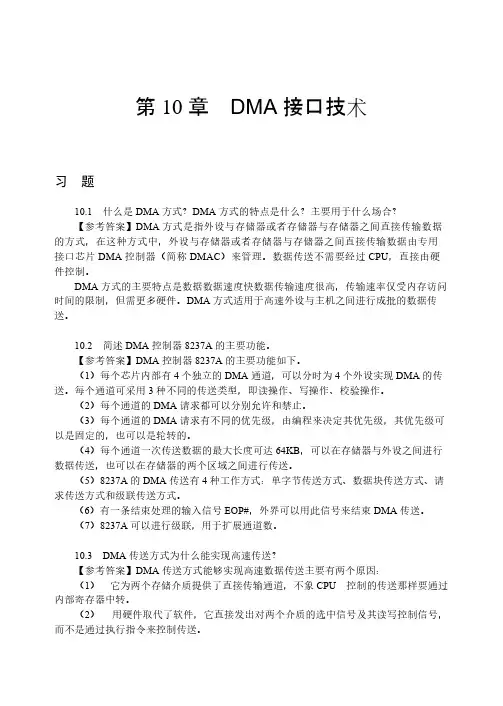
2、参考答案:微处理器就是中央处理器CPU,是计算机的核心,单独的CPU不能构成计算机系统;微型计算机由微处理器、主存储器、I/O接口(注意:不是I/O设备)组成;而微型计算机系统除了包括微型计算机外,还有系统软件(即操作系统)、应用软件、外存储器和I/O设备等。
微型计算机系统结构如下图所示。
3、答案略,见p6~74、答案略,见图2,或教材图1-35、答案略,见p12~136、参考答案:由于8086微处理器的地址总线的宽度为20位,所以它可寻址220=1M字节的存储空间;而PentiumII微处理器的地址总线的宽度为36位,所以它可寻址236=64G字节的存储空间。
7、参考答案:①PCI(Peripheral Component Interconnect:外围设备互联),是Intel公司1992年发布486微处理器时推出的32/64位标准总线,数据传输速率位132MB/s,适用于Pentium微型计算机。
PCI总线是同步且独立于微处理器的具有即插即用(PNP:Plug and play,所谓即插即用,是指当板卡插入系统时,系统会自动对板卡所需资源进行分配,如基地址、中断号等,并自动寻找相应的驱动程序)的特性.PCI总线允许任何微处理器通过桥接口连接到PCI 总线上。
1并行口与串行口的区别:是交换信息的方式不同,并行口能同时通过8条数据线传输信息,一次传输一个字节;而串行口只能用1条线传输一位数据,每次传输一个字节的一位。
并行口由于同时传输更多的信息,速度明显高于串行口,但串行口可以用于比并行口更远距离的数据传输。
(P207)并行接口,指采用并行传输方式来传输数据的接口标准采用串行,通信方式的扩展接口2控制字分为两类:1)方式选择控制字,用来定义A、B、C端口的工作方式2)置位复位控制字,用来对端口C的任意一位进行置位或复位操作可根据最高位即D7位来区别的:若其为0,为置位复位控制字;为1,为方式选择控制字3基本工作方式:方式0:基本的输入/输出方式——特点:1)与外设传送数据时,不需要设置专用的联系信号,可以无条件的直接进行I/O传送。
2)A口和B口工作在方式0时,只能设置以8位数据格式输入/输出,C口可以高4位和低4位分别设置为数据输入或数据输出方式3)常用于外设无条件数据传送或查询方式数据传送。
方式1:选通的输入输出方式方式2:双向传输方式4——读/写控制逻辑:用来管理所有的内部或外部数据信息、控制字或状态字的传送过程。
它接收从CPU的地址总线和控制总线来的信号,并产生对A组和B组控制逻辑进行操作的控制信号。
系统送到读/写控制逻辑的信号包括A0、A1:端口选择信号A1A0=00,选中端口A;A1A0=01,选中端口B; A1A0=10,选中端口C; A1A0=11,选中控制命令口5、有关接口的主要概念(P185)1)接口2)端口:数据端口、状态端口、控制端口3)状态字4)控制字6(P221)1将A组和B组设置成为方式0,A口,B口为输出,C口为输出。
MOV AL, 92HOUT 63H, AL2将A组工作方式设置成方式2,B组为方式1,B口作为输出。
MOV AL, 0C4HOUT 63H, AL3将A口,B口均设置成方式1,均为输入,PC6和PC1为输出。
第10章DMA接口技术习题10.1 什么是DMA方式?DMA方式的特点是什么?主要用于什么场合?【参考答案】DMA方式是指外设与存储器或者存储器与存储器之间直接传输数据的方式,在这种方式中,外设与存储器或者存储器与存储器之间直接传输数据由专用接口芯片DMA控制器(简称DMAC)来管理。
数据传送不需要经过CPU,直接由硬件控制。
DMA方式的主要特点是数据数据速度快数据传输速度很高,传输速率仅受内存访问时间的限制,但需更多硬件。
DMA方式适用于高速外设与主机之间进行成批的数据传送。
10.2 简述DMA控制器8237A的主要功能。
【参考答案】DMA控制器8237A的主要功能如下。
(1)每个芯片内部有4个独立的DMA通道,可以分时为4个外设实现DMA的传送。
每个通道可采用3种不同的传送类型,即读操作、写操作、校验操作。
(2)每个通道的DMA请求都可以分别允许和禁止。
(3)每个通道的DMA请求有不同的优先级,由编程来决定其优先级,其优先级可以是固定的,也可以是轮转的。
(4)每个通道一次传送数据的最大长度可达64KB,可以在存储器与外设之间进行数据传送,也可以在存储器的两个区域之间进行传送。
(5)8237A的DMA传送有4种工作方式:单字节传送方式、数据块传送方式、请求传送方式和级联传送方式。
(6)有一条结束处理的输入信号EOP#,外界可以用此信号来结束DMA传送。
(7)8237A可以进行级联,用于扩展通道数。
10.3 DMA传送方式为什么能实现高速传送?【参考答案】DMA传送方式能够实现高速数据传送主要有两个原因:(1)它为两个存储介质提供了直接传输通道,不象CPU 控制的传送那样要通过内部寄存器中转。
(2)用硬件取代了软件,它直接发出对两个介质的选中信号及其读写控制信号,而不是通过执行指令来控制传送。
10.4 DMA控制器8237A什么时候可作为主设备工作?什么时候可作为从设备工作?在这两种情况下,系统总线的IOR#、IOW#、MEMR#、MEMW#及地址线各处于什么状态?系统总线中哪个信号可以区分8237A处于哪种工作情况?【参考答案】7.3 DMA控制器8237A什么时候作为主模块工作?什么时候作为从模块工作?在这两种情况下,各控制信号处于什么状态,试作说明。
微机原理与接口技术课后部分习题参考答案第一章2. 第3项任务,状态标志位的状态决定转移方向。
3. 程序存储是将要执行的程序的全部指令存储到存储器中,程序控制指程序开始执行后,通过指令流控制数据或计算机,完成设定的任务。
4. 分BIU 总线接口部件和EI执行部件两大部件,其中总线接口部件BIU负责取指令和数据,执行部件EI负责执行指令及运算。
在执行一条指令的同时可以取下一条指令,重叠运行,速度快。
5. 有6个状态标志,分别为进位标志CF、溢出标志OF、零标志ZF、奇偶标志PF、负标志SF、辅助进位标志AF。
3个控制标志分别为中断允许标志IF、单步标志TF、方向标志DF。
标志位的内容可以通过标志位操作指令来操作,例如CLC指令清除进位位,即使CF=0,STC指令使CF=1,CLI指令使IF=0,禁止中断,STI指令使IF=1,允许中断。
还可以通过LAHF指令取来标识寄存器的内容修改后用SAHF指令送回去。
也可以用PUSHF/POPF指令来修改标志寄存器的内容。
6. 实模式下分段靠4个段寄存器实现。
段寄存器中的值就是段地址,当偏移地址为0时的段地址+偏移地址就是该段的起始地址。
物理地址是由段地址左移4位后与偏移地址相加形成的20位地址。
7. 说法不一定正确。
对顺序执行指令的计算机是对的。
对重叠或流水线的计算机就不对了。
例如对8086CPU,由于采用了取指令与执行指令的一次重叠,尽管执行一条指令的总时间并没有变化,但连续执行n条指令时,总的时间会大大缩短,可以简单的比喻成总时间为原时间的二分之一,快了一倍。
8. 引入流水线后,执行一条指令的总时间并没有变化。
9. 高速缓存的目的是提高存储器的速度,进而提高了CPU的速度。
虚拟存储器的目的是为了给程序员或程序一个大的存储或运行空间。
10。
8086采用总线接口部件BIU与执行部件EU分开提高了速度,286将8086的BIU进一步分成3个部件,提高了并行性。
386在286基础上进一步增加成6个逻辑部件,实现多条指令重叠,进一步提高了速度,486采用硬组合逻辑控制器,同时采用内嵌高速缓存,提高速度。
习题11.什么是汇编语言,汇编程序,和机器语言?答:机器语言是用二进制代码表示的计算机能直接识别和执行的一种机器指令的集合。
汇编语言是面向及其的程序设计语言。
在汇编语言中,用助记符代替操作码,用地址符号或标号代替地址码。
这种用符号代替机器语言的二进制码,就把机器语言编程了汇编语言。
使用汇编语言编写的程序,机器不能直接识别,要由一种程序将汇编语言翻译成机器语言,这种起翻译作用的程序叫汇编程序。
2.微型计算机系统有哪些特点?具有这些特点的根本原因是什么?答:微型计算机的特点:功能强,可靠性高,价格低廉,适应性强、系统设计灵活,周期短、见效快,体积小、重量轻、耗电省,维护方便。
这些特点是由于微型计算机广泛采用了集成度相当高的器件和部件,建立在微细加工工艺基础之上。
3.微型计算机系统由哪些功能部件组成?试说明“存储程序控制”的概念。
答:微型计算机系统的硬件主要由运算器、控制器、存储器、输入设备和输出设备组成。
“存储程序控制”的概念可简要地概括为以下几点:①计算机(指硬件)应由运算器、存储器、控制器和输入/输出设备五大基本部件组成。
②在计算机内部采用二进制来表示程序和数据。
③将编好的程序和原始数据事先存入存储器中,然后再启动计算机工作,使计算机在不需要人工干预的情况下,自动、高速的从存储器中取出指令加以执行,这就是存储程序的基本含义。
④五大部件以运算器为中心进行组织。
4.请说明微型计算机系统的工作过程。
答:微型计算机的基本工作过程是执行程序的过程,也就是CPU自动从程序存放的第1个存储单元起,逐步取出指令、分析指令,并根据指令规定的操作类型和操作对象,执行指令规定的相关操作。
如此重复,周而复始,直至执行完程序的所有指令,从而实现程序的基本功能。
5.试说明微处理器字长的意义。
答:微型机的字长是指由微处理器内部一次可以并行处理二进制代码的位数。
它决定着计算机内部寄存器、ALU和数据总线的位数,反映了一台计算机的计算精度,直接影响着机器的硬件规模和造价。
第3章8086/8088指令系统与寻址方式习题3.3 8086系统中,设DS=1000H,ES=2000H,SS=1200H,BX=0300H,SI=0200H,BP=0100H,VAR的偏移量为0600H,请指出下列指令的目标操作数的寻址方式,若目标操作数为存储器操作数,计算它们的物理地址。
(1)MOV BX,12 ;目标操作数为寄存器寻址(2)MOV [BX],12 ;目标操作数为寄存器间址 PA=10300H(3)MOV ES:[SI],AX ;目标操作数为寄存器间址 PA=20200H(4)MOV VAR,8 ;目标操作数为存储器直接寻址 PA=10600H(5)MOV [BX][SI],AX ;目标操作数为基址加变址寻址 PA=10500H(6)MOV 6[BP][SI],AL ;目标操作数为相对的基址加变址寻址 PA=12306H (7)MOV [1000H],DX ;目标操作数为存储器直接寻址 PA=11000H(8)MOV 6[BX],CX ;目标操作数为寄存器相对寻址 PA=10306H(9)MOV VAR+5,AX ;目标操作数为存储器直接寻址 PA=10605H3.4 下面这些指令中哪些是正确的?那些是错误的?如果是错误的,请说明原因。
(1)XCHG CS,AX ;错,CS不能参与交换(2)MOV [BX],[1000] ;错,存储器之不能交换(3)XCHG BX,IP ;错,IP不能参与交换(4)PUSH CS(5)POP CS ;错,不能将数据弹到CS中(6)IN BX,DX ;输入/输出只能通过AL/AX(7)MOV BYTE[BX],1000 ;1000大于255,不能装入字节单元(8)MOV CS,[1000] ;CS不能作为目标寄存器(9)MOV BX,OFFSET VAR[SI] ;OFFSET只能取变量的偏移地址(10)MOV AX,[SI][DI] ;SI、DI不能成为基址加变址(11)MOV COUNT[BX][SI],ES:AX ;AX是寄存器,不能加段前缀3.7 设当前 SS=2010H,SP=FE00H,BX=3457H,计算当前栈顶的地址为多少?当执行PUSH BX 指令后,栈顶地址和栈顶2个字节的内容分别是什么?当前栈顶的地址=2FF00H当执行PUSH BX 指令后,栈顶地址=2FEFEH(2FEFEH)=57H(2FEFFH)=34H3.8 设DX=78C5H,CL=5,CF=1,确定下列各条指令执行后,DX和CF中的值。
《微型计算机原理与接口技术》(尹建华)习题答案第一章2、156D = 10011100B = 9CH79D = 1001111B = 4FH0.675D = 0.1011B = 0.BH37.164D = 100101.0011B = 25.3H3、136D = 10001000B111010.111B = 3A.EH110010.11B = 62.6Q157Q = 06FH133Q = 910AE7.D2H = 101011100111.11010010B0.468D = 0.0111B4、无符号数:151符号数:-1058421BCD:976、+1原码 = 00000001反码 = 00000001补码= 00000001-1原码 = 10000001反码 = 11111110补码 = 11111111+36原码= 00100100反码 = 00100100补码 = 00100100-36原码= 10100100反码 = 11011011补码 = 11011100-128原码= 1000000010000000反码 = 111111*********补码 = 100000007、⑴ -128⑵ -1⑶ 15⑷ -868、⑴ 0 ~ 255⑵ -127 ~ +127⑶ -32767 ~ +32768 11、34H + 89H无溢出0AFH+ 45H无溢出76H-0FEH无溢出第二章2、1MB,64KB3、不能4、4,1,时钟5、0FFFF0H寄存器名FRIPCSDSSSES指令队列其它寄存器复位状态0000H0000HFFFFH0000H0000H0000H清空0000H6、段基地址和偏移地址1230H:0045H1000H:2345H7、90000H ~ 9FFFFH11、等待周期:8086CPU与慢速的存储器和I/O设备交换信息时,为了防止丢失数据,在总线周期的和之间,插入一些必要的等待状态,用来给予必要的时间补偿。
《微型计算机原理与接口技术》习题与思考答案第1章微型计算机概论1.1 A B C 1.2 B 1.3 B 1.4 C 1.5 A B C 1.6 B D1.7 00000111B=7D=07H 11010100B=212D=D4H01101010B=106D=6AH 10110.101B=22.625D=16.AH11001.011B=25.375D=19.6H1.8 127D=11111111B=FFH 12.625D=1100.101B=C.AH225.9375D=11100001.1111B=E1.FH 18.3l25D=10010.0101B=12.5H206.125=11001110.001B=CE.2H1.9 10H=10000B=16D 0.A8H=0.10101B=0.65625D28.9H=101000.1001B=40.5625D 4B.2AH=1001011.0010101B=75.6762D20E.4H=1000001110.01B=526.25D1.10 [+37]原=00100101B [+37]反=00100101B [+37]补=00100101B [+37]过余=10100101B[+94]原=01011110B [+94]反=01011110B [+94]补=01011110B [+94]过余=11011110B[-11]原=10001011B [-11]反=11110100B [-11]补=11110101B [-11]过余=01110101B[-125]原=11111101B [-125]反=10000010B [-125]补=10000011B [-125]过余=00000011B 1.11补码00010101B的真值为+21D 补码41H的真值为+65D补码9BH的真值为-101D 补码FFH的真值为-1D补码11110101B的真值为-11D1.12 A的ASCII码为41H a的ASCII码为61Hg的ASCII码为67H z的ASCII码为7AH0的ASCII码为30H 9的ASCII码为39H*的ASCII码为2AH +的ASCII码为2BHCR的ASCII码为0DH %的ASCII码为25H1.12一个16×16字形点阵占用存储空间32B一个24×24字形点阵占用存储空间72B一个32×32字形点阵占用存储空间128B1.14 (以8位补码为例)[X]补+[Y]补=[+38]补+[+100]补=0001010B,溢出[X]补+[Z]补=[+38]补+[-20]补=00010010B,未溢出[Y]补- [Z]补=[+100]补- [-20]补=01111000B,未溢出[Z]补- [X]补=[-20]补- [+38]补=11000110B,未溢出1.15 X与Y=0100B X或Z=1111B Y异或Z=1101B 非Y=1001B1.16微型计算机具有体积小、重量轻、功耗低;功能强;可靠性高;价格低廉;结构灵活、适应性强;使用方便、维护容易等特点。
现代微型计算机与接⼝教程(杨⽂显)第⼗章课后答案习题⼗1.总线的指标有哪⼏项?总线标准和总线产品哪⼀个先产⽣?(1) 总线宽度: 总线宽度是可以同时传输的数据位数,位数越多,⼀次传输的信息就越多。
(2) 总线频率: 总线通常都有⼀个基本时钟,总线上其它信号都以这个时钟为基准,这个时钟的频率也就是总线⼯作的最⾼频率。
总线频率越⾼,单位时间内传输的数据量就越⼤。
(3) 单个数据传输周期数: 传输⽅式的不同,使得每个数据传输所⽤的时钟周期数不同。
单个数据传输周期数越少,传输率越⾼。
此外,总线的仲裁⽅式,容错性能,是否⽀持突发成组传输,也反映了总线的性能。
总线标准的产⽣有多种形式。
有的总线产品推出后得到⼴泛的认同,随后成为事实上的⼯业标准,这个产品所采⽤的技术规范最终成为标准,标准产⽣在产品之后。
有的技术问题得到较多的关注,由标准化组织或者相关集团发起,制定了相应的标准。
这时,产品的出现晚于标准的制定。
2.ISA卡设计时如何解决资源冲突问题?ISA的I/O空间仅有100H~3FFH的768个地址可供使⽤,其中不少端⼝已分配给“常规”的设备使⽤,新设计I/O扩充卡的端⼝地址不能与它们冲突。
另外,扩充卡之间使⽤的地址也不能发⽣冲突。
为解决这个⽭盾,ISA卡上⼀般都设有⼀组开关(switch),⽤户可以通过设定这组开关来设置这块ISA所占⽤的I/O起始地址,使它位于所使⽤计算机I/O的空闲位置,从⽽避免发⽣冲突。
3.ISA总线需要进⾏总线仲裁吗?为什么?ISA总线是⼀个简单的多主控总线,需要使⽤总线的“主设备”是CPU和最多7个使⽤DMA传送的设备。
当CPU以外的⼀个或多个设备需要使⽤总线时,需要进⾏“总线仲裁”。
对于使⽤DMA请求使⽤总线的设备来说,“仲裁”要分两次进⾏:①DMA请求信号送到8237,由8237进⾏第⼀次“仲裁”;②8237的请求信号发送到CPU,在⼀个总线周期结束时释放总线。
4.若有两块818ISA卡BASE1= 0x0250, BASE2 = 0x0330, switch分别应如何设置?BASE1 = 0x250:swith 1, 4, 6 = off swith 2, 3, 5 = onBASE2 = 0x320:swith 1, 2, 5 = off swith 3, 4, 6 = on5.PCI总线怎样的信号组合启动⼀个总线的访问周期,⼜怎样结束⼀个访问周期?它的AD0~AD31同CPU的同名引脚有何不同?主设备获得总线使⽤权后,将FRAME#置为有效,在AD0~31上发出地址信号,C/BE#上发出总线命令,⼀次总线访问周期开始。
微机原理与接口技术》李华贵主编课后习题参考答案第1章(1.6 习题)1.简述名词的概念:微处理器、微型计算机、微型计算机系统。
答:(1)微处理器:微处理器(Microprocessor)简称或MP,或CPU。
CPU是采用大规模和超大规模集成电路技术将算术逻辑部件ALU (Arithmetic Logic Unit )、控制部件CU (Co ntrol Un it )和寄存器组R (Registers)等三个基本部分以及内部总线集成在一块半导体芯片上构成的电子器件。
(2)微型计算机:微型计算机(Microcomputer )是指以微处理器为核心,配上由大规模集成电路制作的存储器、输入/输出接口电路及系统总线等所组成的计算机,简称微机。
(3)微型计算机系统:微型计算机系统由硬件与软件两大部分组成,分别称为硬件(Hardware)系统与软件(Software)系统。
其中,硬件(Hardware)系统由CPU、内存储器、各类I/O接口、相应的I/O设备以及连接各部件的地址总线、数据总线、控制总线等组成。
软件(Software)系统:计算机软件(Software)是指为运行、维护、管理、应用计算机所编制的程序及程序运行所需要的数据文档资料的总和。
一般把软件划分为系统软件和应用软件。
其中系统软件为计算机使用提供最基本的功能,但是并不针对某一特定应用领域。
而应用软件则恰好相反,不同的应用软件根据用户和所服务的领域提供不同的功能。
2.简述名词的概念:指令寄存器、地址寄存器、标志寄存器。
答:(1)指令寄存器:指令寄存器(Instruction Register,IR)用来保存计算机当前正在执行或即将执行的指令。
当一条指令被执行时,首先,CPU从内存取出指令的操作码,并存入IR中,以便指令译码器进行译码分析。
(2)地址寄存器:地址寄存器(Address Register,AR)被动地接受IP传送给它的地址值(二进制地址),AR的作用是保持IP送来的地址,并且以并行方式连接输出到CPU的地址引脚上,以便CPU访问指定的内存单元。
第一章:1.1 为什么需要半加器和全加器,它们之间的主要区别是什么?答:无论是全加器还是半加器均能实现两个一位的二进制数相加,得到相加的和和向高位的进位。
半加器不需要考虑来自低位的进位,而全家器需考虑来自低位的进位。
1.2 用补码法写出下列减法的步骤:(1) 1111(2)-1010(2)=?(2)=?(10)=00001111B+11110110B=00000101B=5D(2) 1100(2)-0011(2)=?(2)=?(10)=00001100B+11111101B=00001001B=9D第二章:2.1 ALU是什么部件?它能完成什么运算功能?试画出其符号。
答:ALU是算术逻辑运算单元的简称,该部件既能进行二进制数的四则运算,也能进行布尔代数的逻辑运算。
符号略!2.2 触发器、寄存器及存储器之间有什么关系?请画出这几种器件的符号。
答:触发器能存储一位的二进制信息,是计算机记忆装置的基本单元。
寄存器是由多个触发器构成的,能存储多位二进制信息。
存储器又是由多个寄存器构成的。
器件的符号略!2.4 累加器有何用处?画出其符号。
答:累加器是由多个触发器构成的多位寄存器,作为ALU运算过程的代数和的临时存储处。
累加器不仅能装入及输出数据外,还能使存储其中的数据实现左移或右移。
符号略!2.6 何谓L门及E门?它们在总线结构中有何用处?答:L门即LOAD控制端,是用以使寄存器接受数据输入的控制门;E门即ENABLE控制端,是三态输出门,用以控制寄存器中的数据输出至总线。
有了L门及E门,就可以利用总线结构,从而使信息传递的线路简单化。
2.10 除地线公用外,5根地址线和11根地址线各可选多少个地址?答:5根地址线可选25=32个地址;11根地址线可选211=2048个地址。
2.12 存储地址寄存器(MAR)和存储数据寄存器(MDR)各有何用处?答:MAR和MDR均是存储器的附件。
存储地址寄存器(MAR)是一个可控的缓冲寄存器,具有L门以控制地址的输入,它和存储器的联系是双态的,存储地址寄存器存放的是索要寻找的存储单元的地址。
习题一1.1微型计算机系统主要由哪些部分组成?参考答案:微型计算机系统由硬件和软件两大部分组成。
1.2微型计算机中的CPU由哪些部件组成?各部件的功能是什么?参考答案:微型计算机中的CPU由运算器、控制器、寄存器组等部件组成。
其中运算器也称算术逻辑单元(ALU),主要用来完成对数据的运算(包括算术运算和逻辑运算);控制器是控制部件,它能自动、逐条地从内存储器中取指令,将指令翻译成控制信号,并按时间顺序和节拍发往其它部件,指挥各部件有条不紊地协同工作。
微机的数据输入/输出、打印、运算处理等一切操作都必须在控制器的控制下才能进行。
寄存器组是微处理器内部的一组暂时存储单元,主要起到数据准备、调度和缓冲的作用,寄存器的访问速度要比存储器快得多。
1.3微型计算机硬件结构由哪些部分组成?各部分的主要功能是什么?参考答案:微型计算机的硬件结构主要由微处理器、内存储器、输入/输出接口电路、输入/输出设备及系统总线组成。
其中微处理器是微型计算机的核心部件,其主要功能是负责统一协调、管理和控制系统中的各个部件有机地工作;内存储器的主要功能是用来存储微机工作过程中需要操作的数据、程序,运算的中间结果和最后结果,具有存数和取数的功能;输入/输出(I/O)接口电路的功能是完成主机与外部设备之间的信息交换;I/O设备是用户与微机进行通信联系的主要装置,其中输入设备是把程序、数据、命令转换成微机所能识别接收的信息,然后输入给微机;输出设备是把CPU计算和处理的结果转换成人们易于理解和阅读的形式,然后输出到外部。
微机的系统总线实现将CPU、存储器和外部设备进行连接,共有数据总线、地址总线和控制总线三种,其中数据总线主要用来实现在CPU与内存储器或I/O接口之间传送数据;地址总线是由CPU输出用来指定其要访问的存储单元或输入/输出接口的地址的;控制总线;控制总线用于传送控制信号、时序信号和状态信息,实现CPU的工作与外部电路的工作同步。
第十章1. 串行通信与并行通信的主要区别是什么?各有什么优缺点?答:计算机与外部的信息交换称为通信,基本的通信方式有两种,并行通信和串行通信。
并行通信:数据各位同时传送,此方式传输数据的速度快,但使用的通信线多,若要并行传送8位数据,需要用8根数据线,另外还需一些控制信号线。
随着传输距离的增加,通信线成本的增加将成为突出的问题,而且传输的可靠性随着距离的增加而下降。
因此,并行通信适用于近距离传送数据的场合。
串行通信:将要传送的数据或信息按一定的格式编码,然后在单根线上按一位接一位的先后顺序进行传送。
发送完一个字符后,再发送第二个。
接收数据时,每次从单根线上一位接一位的接收信息,再把它们拼成一个字符,送给CPU作进一步处理。
适用于远距离通信,需要的通信线少和传送距离远等优点。
2. 在串行通信中,什么叫单工、半双工、全双工工作方式?答:串行通信时,数据在两个站A与B之间传送,按传送方向分成单工、半双工和全双工三种方式。
单工数据线仅能在一个方向上传输数据,两个站之间进行通信时,一边只能发送数据,另一边只能接收数据,也称为单向通信。
在半双工方式中,数据可在两个设备之间向任一个方向传输,但两个设备之间只有一根传输线,故同一时间内只能在一个方向上传输数据,不能同时收发。
全双工:对数据的两个传输方向采用不同的通路,可以同时发送和接收数据。
3. 什么叫同步工作方式?什么叫异步工作方式?哪种工作方式的效率更高?为什么?答:串行通信有两种基本工作方式:异步方式和同步方式异步方式:不发送数据时,数据信号线总是呈现高电平,称为MARK状态,也称空闲状态。
当有数据要发送时,数据信号线变成低电平,并持续一位的时间,用于表示字符的开始,称为起始位。
起始位后,在信号线上依次出现待发送的每一位字符数据,最低有效位D0最先送出,根据不同编码,有效数据位可由5位、6位、7位或8位构成,数据位后面有一个奇偶校验位,校验位后至少有一位高电平表示停止位,用于指示字符的结束。
微机原理和接口技术课后习题和参考答案解析(汇编)精品文档第一章课后习题1.1 把下列十进制数转换成二进制数、八进制数、十六进制数。
① 16.25 ② 35.75 ③ 123.875 ④ 97/128 1.2 把下列二进制数转换成十进制数。
① 10101.01 ② 11001.0011 ③ 111.01 ④ 1010.1 1.3 把下列八进制数转换成十进制数和二进制数。
① 756.07 ② 63.73 ③ 35.6 ④ 323.45 1.4 把下列十六进制数转换成十进制数。
① A7.8 ② 9AD.BD ③ B7C.8D ④ 1EC 1.5 求下列带符号十进制数的8位补码。
① +127 ② -1 ③ -0 ④ -1281.6 求下列带符号十进制数的16位补码。
① +355 ② -11.7 计算机分那几类?各有什么特点?1.8 简述微处理器、微计算机及微计算机系统三个术语的内涵。
1.9 80X86微处理器有几代?各代的名称是什么? 1.10 你知道现在的微型机可以配备哪些外部设备? 1.11 微型机的运算速度与CPU的工作频率有关吗? 1.12 字长与计算机的什么性能有关?习题一参考答案1.1 ① 16.25D=10000.01B=20.2Q=10.4H② 35.75D=100011.11B=43.6Q=23.CH③ 123.875D=1111011.111B=173.7Q=7B.EH④ 97/128D=64/123+32/128+1/128=0.1100001B=0.604Q=0.C2H 1.2 ①10101.01B=21.25D ② 11001.0011B=25.1875D ③ 111.01B=7.25D ④ 1010.1B=10.5D1.3 ① 756.07Q=111101110.000111B=494.109D ② 63.73Q=110011.111011B=51.922D③ 35.6Q=11101.110B=29.75D ④ 323.45Q=11010011.100101B=211.578D1.4 ① A7.8H=167.5D ② 9AD.BDH=2477.738D③ B7C.8D=2940.551D ④ 1ECH=492D1.5 ① [+127]补=01111111 ② [-1] 补= 11111111③ [-0] 补=00000000 ④[-128] 补=100000001.6 ① [+355] 补= 0000000101100011 ② [-1] 补= 1111 1111 1111 1111 1.7 答:传统上分为三类:大型主机、小型机、微型机。
第一章1.什么是冯·诺依曼机?答:冯·诺依曼于1945 年提出了存储程序的概念和二进制原理,利用这种概念和原理设计的电子计算机系统统称为冯·诺依曼机。
它包括运算器、控制器、存储器、输入设备和输出设备五个组成部分。
早期的冯·诺依曼机结构上以运算器和控制器为中心,随着计算机体系结构的发展,现在已演化为以存储器为中心的结构。
2.微处理器,微型计算机,微型计算机系统有什么联系与区别?答:微处理器是微型计算机系统的核心,也称为 CPU(中央处理器)。
主要完成:①从存储器中取指令,指令译码;②简单的算术逻辑运算;③在处理器和存储器或者 I/O 之间传送数据;④程序流向控制等。
微型计算机由微处理器、存储器、输入 /输出接口电路和系统总线组成。
以微型计算机为主体,配上外部输入/输出设备及系统软件就构成了微型计算机系统。
三者关系如下图:3.微处理器有哪些主要部件组成?其功能是什么?答:微处理器是一个中央处理器,由算术逻辑部件 ALU 、累加器和寄存器组、指令指针寄存器 IP、段寄存器、标志寄存器、时序和控制逻辑部件、内部总线等组成。
算术逻辑部件 ALU 主要完成算术运算及逻辑运算。
累加器和寄存器组包括数据寄存器和变址及指针寄存器,用来存放参加运算的数1据、中间结果或地址。
指令指针寄存器 IP 存放要执行的下一条指令的偏移地址,顺序执行指令时,每取一条指令增加相应计数。
段寄存器存放存储单元的段地址,与偏移地址组成20 位物理地址用来对存储器寻址。
标志寄存器 flags 存放算术与逻辑运算结果的状态。
时序和控制逻辑部件负责对整机的控制:包括从存储器中取指令,对指令进行译码和分析,发出相应的控制信号和时序,将控制信号和时序送到微型计算机的相应部件,使CPU内部及外部协调工作。
内部总线用于微处理器内部各部件之间进行数据传输的通道。
4.画一个计算机系统的方框图,简述各部分主要功能。
答:计算机系统由硬件( Hardware )和软件( Software)两大部分组成。
微机原理与接口技术(第二版)课后习题答案第1章作业答案1.1 微处理器、微型计算机和微型计算机系统三者之间有什么不同?解:把CPU(运算器和控制器)用大规模集成电路技术做在一个芯片上,即为微处理器。
微处理器加上一定数量的存储器和外部设备(或外部设备的接口)构成了微型计算机。
微型计算机与管理、维护计算机硬件以及支持应用的软件相结合就形成了微型计算机系统。
1.2 CPU在内部结构上由哪几部分组成?CPU应该具备哪些主要功能? 解:CPU主要由起运算器作用的算术逻辑单元、起控制器作用的指令寄存器、指令译码器、可编程逻辑阵列和标志寄存器等一些寄存器组成。
其主要功能是进行算术和逻辑运算以及控制计算机按照程序的规定自动运行。
1.3 微型计算机采用总线结构有什么优点?解:采用总线结构,扩大了数据传送的灵活性、减少了连线。
而且总线可以标准化,易于兼容和工业化生产。
1.4 数据总线和地址总线在结构上有什么不同之处?如果一个系统的数据和地址合用一套总线或者合用部分总线,那么要靠什么来区分地址和数据?解:数据总线是双向的(数据既可以读也可以写),而地址总线是单向的。
8086CPU为了减少芯片的引脚数量,采用数据与地址线复用,既作数据总线也作为地址总线。
它们主要靠信号的时序来区分。
通常在读写数据时,总是先输出地址(指定要读或写数据的单元),过一段时间再读或写数据。
1.8在给定的模型中,写出用累加器的办法实现15×15的程序。
解: LD A, 0LD H, 15LOOP:ADD A, 15DEC HJP NZ, LOOPHALT第 2 章作业答案2.1 IA-32结构微处理器直至Pentillm4,有哪几种?解:80386、30486、Pentium、Pentium Pro、Peruium II 、PentiumIII、Pentium4。
2.6 IA-32结构微处理器有哪几种操作模式?解:IA一32结构支持3种操作模式:保护模式、实地址模式和系统管理模式。
第十章1. 串行通信与并行通信的主要区别是什么?各有什么优缺点?答:计算机与外部的信息交换称为通信,基本的通信方式有两种,并行通信和串行通信。
并行通信:数据各位同时传送,此方式传输数据的速度快,但使用的通信线多,若要并行传送8位数据,需要用8根数据线,另外还需一些控制信号线。
随着传输距离的增加,通信线成本的增加将成为突出的问题,而且传输的可靠性随着距离的增加而下降。
因此,并行通信适用于近距离传送数据的场合。
串行通信:将要传送的数据或信息按一定的格式编码,然后在单根线上按一位接一位的先后顺序进行传送。
发送完一个字符后,再发送第二个。
接收数据时,每次从单根线上一位接一位的接收信息,再把它们拼成一个字符,送给CPU作进一步处理。
适用于远距离通信,需要的通信线少和传送距离远等优点。
2. 在串行通信中,什么叫单工、半双工、全双工工作方式?答:串行通信时,数据在两个站A与B之间传送,按传送方向分成单工、半双工和全双工三种方式。
单工数据线仅能在一个方向上传输数据,两个站之间进行通信时,一边只能发送数据,另一边只能接收数据,也称为单向通信。
在半双工方式中,数据可在两个设备之间向任一个方向传输,但两个设备之间只有一根传输线,故同一时间内只能在一个方向上传输数据,不能同时收发。
全双工:对数据的两个传输方向采用不同的通路,可以同时发送和接收数据。
3. 什么叫同步工作方式?什么叫异步工作方式?哪种工作方式的效率更高?为什么?答:串行通信有两种基本工作方式:异步方式和同步方式异步方式:不发送数据时,数据信号线总是呈现高电平,称为MARK状态,也称空闲状态。
当有数据要发送时,数据信号线变成低电平,并持续一位的时间,用于表示字符的开始,称为起始位。
起始位后,在信号线上依次出现待发送的每一位字符数据,最低有效位D0最先送出,根据不同编码,有效数据位可由5位、6位、7位或8位构成,数据位后面有一个奇偶校验位,校验位后至少有一位高电平表示停止位,用于指示字符的结束。
由此可见,异步方式发送一个7位的ASCII码时,实际需发送10位、10.5位或11位信息,故影响传输效率。
同步方式:没有数据传送时,传输线处于MARK状态,为了表示数据传输的开始,发送方式发送一个或两个特殊字符,称为同步字符。
当发送法和接收方达到同步后,就可以一个字符接一个字符发送一大块数据,不再需要用起始位和停止位了,这样就可以明显的提高数据的传输速率。
同步方式传送数据时,在发送过程中,收发双发还必须用同一个时钟进行协调,用于确定串行传输中每一位的位置。
接收数据时,接受方可利用同步字符将内部时钟与发送方保持同步,然后将同步字符后面的数据逐位移入,并转换成并行格式,供CPU读取,直至收到结束符为止。
4. 用图表示异步串行通信数据的位格式,标出起始位,停止位和奇偶校验位,在数字位上标出数字各位发送的顺序。
答:5. 什么叫波特率?什么叫波特率因子?常用的波特率有哪些?答:在串行通信中,波特率表示数据传送的速率,每秒钟内所传送数据的位数称为波特率,单位为波特bps(Bd)。
在波特率指定后,输入移位寄存器/输出移位寄存器在接收时钟/发送时钟控制下,按指定的波特率速度进行移位。
一般几个时钟脉冲移位一次。
要求:接收时钟/发送时钟是波特率的16、32或64倍。
波特率因子就是发送/接收1个数据(1个数据位)所需要的时钟脉冲个数,其单位是个/位。
常用的波特率为110,300,600,1200,2400,4800,9600,19200,28800,36400,57600波特。
6. 若某一终端以2400波特的速率发送异步串行数据,发送1位需要多少时间?假设一个字符包含7个数据位、1个奇偶校验位、1个停止位,发送1个字符需要多少时间?答:1/2400=0.416ms,一个字符包含7个数据位、1个奇偶校验位、1个停止位,1个起始位,发送1个字符需要10/2400=4.16ms7. 什么叫UART?什么叫USART?列举典型芯片的例子。
答:仅用于异步通信的接口芯片,称为通用异步收发器UART(Universal Asynchronous Receiver-Transmitter),典型芯片如INS 8250。
既可以工作于异步方式,又可工作于同步方式,称为通用同步异步收发器USART (Universal Synchronous-Asynchronous Receiver-Transmitter),典型芯片如Intel 8251A。
8. 什么叫MODEM?用标准电话线发送数字数据为什么要用MODEM?调制的形式主要有哪几种?答:能将数字信号转换成音频信号及将音频信号恢复成数字信号的器件称为调制解调器,即MODEM。
标准电话线只能传送带宽为300Hz~3000Hz的音频信号,不能直接传送频带很宽的数字信号,为了解决此问题,在发送数据时,先把数字信号转换成音频信号后,称为调制,再利用电话线进行传输,接收数据时又将音频信号恢复成数字信号,称为解调。
调制的形式主要有:幅度(Amplitude)调制或幅移键控ASK(Amplitude-Shift Keying)简称“调幅”频率键移FSK(Frequency-Shift Keying,简称“调频”)相位键移PSK(Phase-Shift Keying,简称“调相”)多路载波(Multiple Carrier)9. 若8251A以9600波特的速率发送数据,波特率因子为16,发送时钟TxC频率为多少?答:发送时钟TxC频率=9600*16=153600Hz10. 8251A的SYNDET/BRKDET引脚有哪些功能?答:SYNDET/BRKDET(Synchronous Detect/Break Detect) 同步检测/断点检测,输出/输入,高电平有效。
(1)8251A工作于同步方式该引脚表示SYNDET,内同步时该引脚为输出,有效状态(高电平)表示8251A已经检测到同步字符;外同步时该引脚为输入,由该引脚输入同步脉冲,上升沿启动8251A接收数据。
(2)8251A工作于异步方式该引脚表示BRKDET,是输出信号,有效状态(高电平)表示接收端检测到间断点(编程规定长度的全“0”字符);恢复正常数据接收时该引脚被复位。
11. 如果系统中无MODEM,8251A与CPU之间有哪些连接信号?答:8251A 和 CPU 之间的连接信号可以分为四类:(1)片选信号CS:片选信号,它由 CPU 的地址信号通过译码后得到。
(2)数据信号D0~D7: 8 位,三态,双向数据线,与系统的数据总线相连。
传输 CPU 对 8251A 的编程命令字和 8251A 送往 CPU 的状态信息及数据。
(3)读 / 写控制信号RD:读信号,低电平时, CPU 当前正在从 8251A 读取数据或者状态信息。
WR:写信号,低电乎时, CPU 当前正在往 8251A 写入数据或者控制信息。
C/:控制 / 数据信号,用来区分当前读 / 写的是数据还是控制信息或状态信息。
该信号D也可看作是 8251A 数据口 / 控制口的选择信号。
(4)收发联络信号TXRDY:发送器准备好信号,用来通知CPU, 8251A 已准备好发送一个字符。
TXE :发送器空信号, TXE 为高电平时有效,用来表示此时 8251A 发送器中并行到串行转换器空,说明一个发送动作已完成。
RXRDY :接收器准备好信号,用来表示当前 8251A 已经从外部设备或调制解调器接收到一个字符,等待 CPU 来取走。
因此,在中断方式时, RXRDY 可用来作为中断请求信号;在查询方式时, RXRDY 可用来作为查询信号。
SYNDET :同步检测信号,只用于同步方式。
12. 在一个以8086为CPU的系统中,若8251A的数据端口地址为84H,控制口和状态口的地址为86H,试画出地址译码电路、数据总线和控制总线的连接图。
答:13. 设8251A的端口地址如题12,要求8251A工作于内同步方式,同步字符为2个,用偶校验,7个数据位,试对8251A进行初始化编程。
答:MOV AL,0OUT 86H,ALOUT 86H,ALOUT 86H,AL ;向控制口写入三个0MOV AL,40HOUT 86H,AL ;写入复位字MOV AL,00111000BOUT 86H,AL ;写入方式字MOV AL,SYSN ;同步字符OUT 86H,ALOUT 86H,AL ;两个同步字符MOV AL,10010101BOUT 86H,AL ;送命令字14. 若8251A的端口地址为FF0H,FF2H,要求8251A工作于异步工作方式,波特率因子为16,有7个数据位,1个奇校验位,1个停止位,试对8251A进行初始化编程。
答:MOV AL,0MOV DX,0FF2HOUT DX,ALOUT DX,ALOUT DX,AL ;向控制口写入三个0MOV AL,40HOUT DX,AL ;写入复位字MOV AL,01011010BOUT DX,AL ;写入方式字MOV AL,00010101BOUT DX,AL ;写入命令字15. RS-232C的逻辑高电平与逻辑低电平的范围是多少?怎么与TTL电平的器件相连?规定用什么样的接插件?最少用哪几根信号线进行通信?答:逻辑高电平:有负载时为-3V~-15V,无负载时为-25V逻辑低电平:有负载时为+3V~+15V,无负载时为+25V通常用±12V作为RS-232C的电平。
计算机及其接口芯片多采用TTL电平,即0~0.8V为逻辑0,+2.0V~+5V为逻辑1,与RS-232C电平不匹配,必须设计专门的电路进行电平转换,常用的电平转换电路为MAX232和MAX233。
RS-232C使用25芯的D型插头插座和9芯的D型接插件。
常用的信号线有:TxD 发送数据,RxD 接收数据,RTS请求发送,CTS清除发送,DSR数据装备准备好等信号。
16. 某微机系统用串行方式接收外设送来的数据,再把数据送到CRT去显示,若波特率为1200,波特率因子为16,用8253产生收发时钟,系统时钟频率为5MHz,收发数据个数为COUNT,数据存放到数据段中以BUFFER为始址的内存单元中。
8253和8251A的基地址分别为300H和304H。
(1)画出系统硬件连线图。
(2)编写8253和8251A的初始化程序。
(3)编写接收数据的程序。
答:(1)8251的接收时钟RxC=1200*16=19200Hz,用8253产生收发时钟,使用通道0产生频率为19200Hz的方波,故计数初值为n0=5MHz/19200Hz≈260(2)8253的初始化程序MOV DX,303HMOV AL,00110111BOUT DX,AL ;8253控制字,通道0,方式3,BCD计数MOV DX,300HMOV AL,60H ;初值低字节OUT DX,ALMOV AL,02H ;初值高字节OUT DX,AL8251A的初始化程序MOV AL,0MOV DX,305HOUT DX,ALOUT DX,ALOUT DX,AL ;向控制口写入3个0MOV AL,40H ;复位字OUT DX,ALMOV AL,01111010B ;方式字,异步,1停止位,偶校验,7位数据OUT DX,ALMOV AL,14HOUT DX,AL ;输出命令字,清错误标志,允许接收(3)接收数据的程序采用查询方式,异步传送LEA DI,BUFFER ;接收数据缓冲区MOV CX,COUNT ;接收数据个数MOV DX,305HNEXT:IN AL,DX ;读入状态字TEST AL,02H ;RxRDY有效吗JZ NEXT ;否,循环等待TEST AL,38H ;是,检查是否有错JNZ ERROR ;有错,转出错处理程序MOV DX,303H ;数据端口IN AL,DX ;无错,读入一个数据MOV [DI],AL ;送缓冲区INC DIMOV DX,305HLOOP NEXT ;数据没传完则继续….. ;完成ERROR:…… ;出错处理。