17 串行接口与C51编程
- 格式:ppt
- 大小:343.50 KB
- 文档页数:30
单片机C51编程规范1单片机C51编程规范-前言为了提高源程序的质量和可维护性,从而最终提高软件产品生产力,特编写此规范。
2 单片机C51编程规范-范围本标准规定了程序设计人员进行程序设计时必须遵循的规范。
本规范主要针对C51编程语言和keil编译器而言,包括排版、注释、命名、变量使用、代码可测性、程序效率、质量保证等内容。
3 单片机C51编程规范-总则l 格式清晰l 注释简明扼要l 命名规范易懂l 函数模块化l 程序易读易维护l 功能准确实现l 代码空间效率和时间效率高l 适度的可扩展性4 单片机C51编程规范-数据类型定义编程时统一采用下述新类型名的方式定义数据类型。
建立一个datatype.h文件,在该文件中进行如下定义:typedef bit BOOL; // 位变量//typedef unsigned char INT8U; // 无符号8位整型变量//typedef signed char INT8S; // 有符号8位整型变量//typedef unsigned int INT16U; // 无符号16位整型变量//typedef signed int INT16S; // 有符号16位整型变量//typedef unsigned long INT32U; // 无符号32位整型变量//typedef signed long INT32S; // 有符号32位整型变量//typedef float FP32; // 单精度浮点数(32位长度) //typedef double FP64; // 双精度浮点数(64位长度) //5 单片机C51编程规范-标识符命名5.1 命名基本原则l 命名要清晰明了,有明确含义,使用完整单词或约定俗成的缩写。
通常,较短的单词可通过去掉元音字母形成缩写;较长的单词可取单词的头几个字母形成缩写。
即"见名知意"。
l 命名风格要自始至终保持一致。
c51程序课程设计一、课程目标知识目标:1. 掌握C51编程语言的基本语法和结构;2. 理解并掌握C51的寄存器、内存管理及位操作等特性;3. 学会使用C51编写简单的嵌入式程序,实现基础功能;4. 了解C51程序与硬件之间的交互及接口技术。
技能目标:1. 能够运用C51编程语言设计简单的嵌入式系统程序;2. 培养学生分析问题、解决问题的能力,能够针对实际问题进行程序设计和调试;3. 学会使用C51的开发工具和调试方法,提高实际操作能力。
情感态度价值观目标:1. 培养学生对嵌入式系统开发的兴趣,激发创新意识;2. 培养学生严谨、细致的编程习惯,增强团队协作意识;3. 引导学生认识到编程对于国家科技发展的重要性,树立社会责任感。
本课程针对高中年级学生,结合学科特点和教学要求,注重理论与实践相结合。
课程目标旨在使学生掌握C51程序设计的基本知识和技能,培养学生解决实际问题的能力,同时提高学生的情感态度价值观,为我国嵌入式领域培养优秀人才。
通过对课程目标的分解,教师可进行针对性的教学设计和评估,确保学生达到预期学习成果。
二、教学内容1. C51编程语言基础:- 数据类型、变量、常量- 运算符、表达式和语句- 控制结构(顺序、选择、循环)- 函数的定义和调用2. C51特殊功能及寄存器:- SFR寄存器及其操作- 位操作及位带操作- 中断处理与定时器3. C51内存管理:- 内部RAM和外部RAM的使用- 程序存储器操作- 数据存储器操作4. C51程序设计与实践:- 简单I/O口编程- 系统时钟与串行通信- ADC和DAC编程- 综合项目设计实例5. 课程实践与调试:- 使用开发工具(如Keil uVision)- 程序编译、下载和调试- 常见错误分析和解决方法教学内容按照教学大纲安排,结合教材相关章节,循序渐进地展开。
确保学生在掌握基础知识的同时,能够逐步深入到实际应用。
通过理论与实践相结合的教学内容,使学生在完成本课程学习后,具备基本的C51程序设计能力。
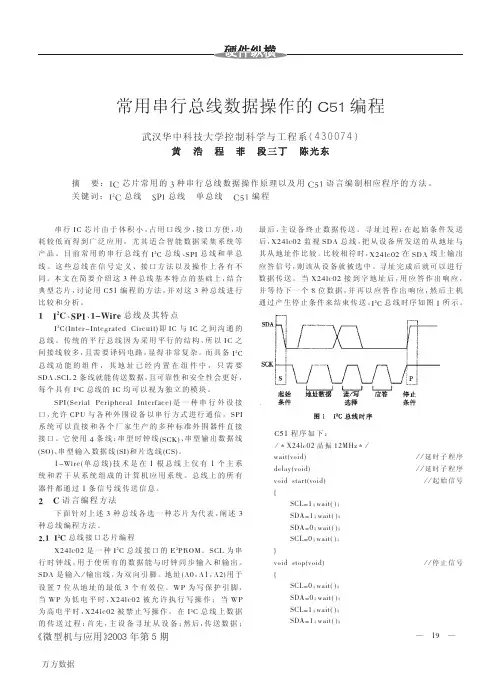
c51串口通信原理
C51串口通信的原理主要涉及到串行数据传输的方式。
在C51中,串口通
信可以通过串行数据通信模式进行,包括单工通信、半双工通信和全双工通信。
在串行通信中,数据是一位一位地进行传输的。
每一位数据在传输中都占据一个固定的时间长度。
串行通信的一个主要优点是传输线少,占用引脚资源少,成本低,适合远距离传送。
具体到C51的串口通信,其工作方式可以分为方式0、方式1等。
在方式0时,串行口作为同步移位寄存器的输入输出方式,数据由RXD()引脚输
入或输出,同步移位脉冲由TXD()引脚输出。
发送和接收均为8位数据,低位在先,高位在后。
在方式1时,它是10位数据的异步通信口,TXD为数据发送引脚,RXD为数据接收引脚,传送一帧数据的格式包括1位起始位、8位数据位和1位停止位。
此外,关于串行口的波特率,PCON中有一位SMOD与串行口工作有关:SMOD()波特率倍增位。
在串行口方式1、方式2、方式3时,波特率与SMOD有关,当SMOD=1时,波特率提高一倍。
复位时,SMOD=0。
以上是C51串口通信的基本原理,如需了解更多信息,建议咨询专业技术人员或查阅C51相关的专业书籍。
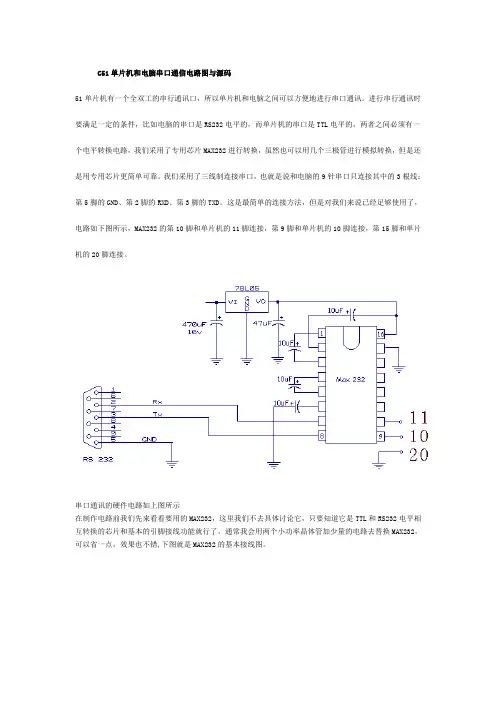
C51单片机和电脑串口通信电路图与源码51单片机有一个全双工的串行通讯口,所以单片机和电脑之间可以方便地进行串口通讯。
进行串行通讯时要满足一定的条件,比如电脑的串口是RS232电平的,而单片机的串口是TTL电平的,两者之间必须有一个电平转换电路,我们采用了专用芯片MAX232进行转换,虽然也可以用几个三极管进行模拟转换,但是还是用专用芯片更简单可靠。
我们采用了三线制连接串口,也就是说和电脑的9针串口只连接其中的3根线:第5脚的GND、第2脚的RXD、第3脚的TXD。
这是最简单的连接方法,但是对我们来说已经足够使用了,电路如下图所示,MAX232的第10脚和单片机的11脚连接,第9脚和单片机的10脚连接,第15脚和单片机的20脚连接。
串口通讯的硬件电路如上图所示在制作电路前我们先来看看要用的MAX232,这里我们不去具体讨论它,只要知道它是TTL和RS232电平相互转换的芯片和基本的引脚接线功能就行了。
通常我会用两个小功率晶体管加少量的电路去替换MAX232,可以省一点,效果也不错,下图就是MAX232的基本接线图。
按图7-3加上MAX232就可以了。
这大热天的拿烙铁焊焊,还真的是热气迫人来呀:P串口座用DB9的母头,这样就可以用买来的PC串口延长线进行和电脑相连接,也可以直接接到电脑com口上。
为了能够在电脑端看到单片机发出的数据,我们必须借助一个WINDOWS软件进行观察,这里我们利用一个免费的电脑串口调试软件。
本串口软件在本网站可以找到软件界面如上图,我们先要设置一下串口通讯的参数,将波特率调整为4800,勾选十六进制显示。
串口选择为COM1,当然将网站提供的51单片机实验板的串口也要和电脑的COM1连接,将烧写有以下程序的单片机插入单片机实验板的万能插座中,并接通51单片机实验板的电源。
串口实验的源程序如下所示:;这是一个S51单片机实验开发板向PC机的串口单向发送数据AF的演示程序;采用MAX232专用芯片作RS232/TTL电平转换.;通讯波特率为4800KBPS,只要按下一次K1(就是P3.6引脚变成低电平);就发送一个16进制的AF字符ORG 0000HMOV SCON,#50H;设置成串口1方式MOV TMOD,#20H;波特率发生器T1工作在模式2上MOV PCON,#80H;波特率翻倍为2400x2=4800BPSMOV TH1,#0F3H;预置初值(按照波特率2400BPS预置初值)MOV TL1,#0F3H;预置初值(按照波特率2400BPS预置初值)SETB TR1;启动定时器T1;以上完成通讯初始化设置WRIT:JB P3.6,$;判断K1是否按下,如果没有按下就等待ACALL DELAY10;延时10毫秒消触点抖动JB P3.6,WRIT;去除干扰信号JNB P3.6,$;等待按键松开MOV A,#0AFH;将16进制的字符AF发送到串口去MOV SBUF,A;将AF通过串口发送出去AJMP WRIT;10毫秒延时子程序DELAY10:MOV R4,#20D2:MOV R5,#248DJNZ R5,$DJNZ R4,D2RETEND;=============两机串口通讯程序(主机)===================== ; 功能: 使用串行中断,接收数据并显示; 硬件环境: 自制单片机实验板; 软件环境: 伟福 V3.20; Create date: 2004_07_26; First Modify: 2004_07_26; second Modify:; Last Modify: 2004_07_26; Author: Sujiande;;===========预定义===================LED0 EQU 40H ;预定义数码管LED1 EQU 41H ;预定义数码管LED2 EQU 42H ;预定义数码管LED3 EQU 43H ;预定义数码管LED4 EQU 44H ;预定义数码管LED5 EQU 45H ;预定义数码管LED6 EQU 46H ;预定义数码管LED7 EQU 47H ;预定义数码管SDA BIT P0.1 ; 定义数据线引脚定义SCL BIT P0.0 ; 定义时钟线引脚定义;---------------------------ORG 0000H ;主程序入口AJMP MAIN ;跳转到主程序ORG 0100H ;主程序在ROM中存放位置;===============主程序=====================MAIN:MOV LED0,#00H ;赋初值MOV LED1,#00HMOV LED2,#16 ;赋初值为16, 数码管显示代码为: 灭MOV LED3,#16MOV LED4,#16MOV LED5,#16MOV LED6,#16MOV LED7,#16;--------------------;MOV DPTR,#TABLE ; 赋显示代码首地址MOV R1,#00H ; 给R1赋初值00HACALL DISPLAY ; 调显示子程序MOV SP, #30H ; 给堆栈指针赋初值;--------------------------; 使用定时器1,作为波特率发生器,设定波特率=9600,; 定时器初值为:FAH; 串行控制器设置:SM0=0,SM1=1,SM2=0,REN=1,TB8=0,; RB8=0,TI=0,RI=0 即0101 0000B; 波特率加倍;-----------------------------MOV TMOD,#20H ;设置定时器1,工作方式2MOV TH1,#0FAh ;赋初值: FAMOV TL1,#0FAh ;赋初值: FAMOV SCON, #50h ;设置串行口控制寄存器MOV PCON, #80h ;设置电源控制寄存器, 让波特率加倍(2X) SETB TR1 ;启动定时;*****************主程序结束************************ LP8: MOV A,R1 ;将1的数据装到A中;-----------------------MOV SBUF,A ;将A的数据送到缓冲区JNB TI,$ ;等待数据发送完毕CLR TI ;清发送中断标志;-----------------------INC R1CJNE R1,#99,LP3MOV R1,#00HLP3: ACALL SEPERATE ;调拆分程序ACALL DISPLAY ;调显示子程序ACALL DELAY_1S ;调延时子程序AJMP LP8;=================拆分程序===================== SEPERATE: ANL A,#0Fh ;与操作得到个位数据MOV LED0,A ;个位送LED0MOV A,R1ANL A,#0F0H ;与操作得到十位数据SWAP AMOV LED1,A ;十位送LED1RET;===============显示子程序===================== DISPLAY:MOV DPTR,#TABLE ; 赋显示代码首地址MOV A,LED0 ;查表数据送AMOVC A,@A+DPTR ;查表,得到显示代码ACALL SHIFT ;调移位子程序MOV A,LED1MOVC A,@A+DPTRACALL SHIFTMOV A,LED2MOVC A,@A+DPTRACALL SHIFTMOV A,LED3MOVC A,@A+DPTRACALL SHIFTMOV A,LED4MOVC A,@A+DPTRACALL SHIFTMOV A,LED5MOVC A,@A+DPTRACALL SHIFTMOV A,LED6MOVC A,@A+DPTRACALL SHIFTMOV A,LED7MOVC A,@A+DPTRACALL SHIFTRET;---------显示代码表---------TABLE: DB 11H,0D7H,32H,92H,0D4H,98H,18H,0D3H,10H,90H ;0,1,2,3,4,5,6,7,8,9, DB 50H,1CH,39H,16H,38H,78H, 0FFH,0FEH,0EFH ;10,11,12,13,14,15,灭,-;================移位子程序============================SHIFT: PUSH A ; 进栈暂存A值MOV R0,#8 ; 循环8次CLR C ;清进位标志CLR SCL ;时钟线,先钳位为0LP2: RLC AMOV SDA,CNOPNOPSETB SCLNOPNOPCLR SCLNOPNOPDJNZ R0,LP2POP A ; 出栈恢复A值RET;=============延时子程序===============DELAY_1S:MOV R7,#0ffHLOOP7: MOV R6,#0ffHLOOP6: NOPNOPNOPNOPNOPNOPDJNZ R6,LOOP6DJNZ R7,LOOP7RET;------------------------------END;=============两机串口通讯程序(从机)===================== ; 功能: 使用串行中断,接收数据并显示; 硬件环境: 自制单片机实验板; 软件环境: 伟福 V3.20; Create date: 2004_07_26; First Modify: 2004_07_26; second Modify:; Last Modify: 2004_07_26; Author: Sujiande;===========预定义===================LED0 EQU 40H ;预定义数码管LED1 EQU 41H ;预定义数码管LED2 EQU 42H ;预定义数码管LED3 EQU 43H ;预定义数码管LED4 EQU 44H ;预定义数码管LED5 EQU 45H ;预定义数码管LED6 EQU 46H ;预定义数码管LED7 EQU 47H ;预定义数码管SDA BIT P0.1 ; 定义数据线引脚定义SCL BIT P0.0 ; 定义时钟线引脚定义;---------------------------ORG 0000H ;主程序入口AJMP MAIN ;跳转到主程序ORG 0023H ;中断入口地址AJMP S_INT ;跳转到中断程序ORG 0100H ;主程序在ROM中存放位置;==============主程序========================MAIN:MOV LED0,#00H ;赋初值MOV LED1,#00HMOV LED2,#16 ;赋初值为16, 数码管显示代码为: 灭MOV LED4,#16MOV LED5,#16MOV LED6,#16MOV LED7,#16;------------------------------MOV DPTR,#TABLE ; 赋显示代码首地址ACALL DISPLAY ; 调显示子程序MOV SP, #30H ; 给堆栈指针赋初值;--------------------------------------------; 使用定时器1,作为波特率发生器,设定波特率=9600,; 定时器初值为:FAH; 串行控制器设置:SM0=0,SM1=1,SM2=0,REN=1,TB8=0,; RB8=0,TI=0,RI=0 即0101 0000B; 波特率加倍;---------------------------------------------MOV TMOD,#20H ;设置定时器1,工作方式2MOV TH1,#0FAh ;赋初值: FAMOV TL1,#0FAh ;赋初值: FAMOV SCON, #50h ;设置串行口控制寄存器MOV PCON, #80h ;设置电源控制寄存器, 让波特率加倍(2X);---------------------------------------SETB EA ; 启动总中断SETB ES ; 启动串行中断SETB TR1 ;启动定时AJMP $ ; 等待中断;*****************主程序结束************************;===============中断服务程序============================= S_INT:MOV R1, SBUF ;将缓冲区的数据送到R1ACALL SEPERATE ;调拆分程序ACALL DISPLAY ;调显示子程序CLR RI ;清接收中断标志RETI ;中断返回;=================拆分程序===================== SEPERATE: MOV A,R1ANL A,#0Fh ;与操作得到个位数据MOV LED0,A ;个位送LED0MOV A,R1ANL A,#0F0H ;与操作得到十位数据SWAP A ;MOV LED1,A ;十位送LED1RET;===============显示子程序======================MOV A,LED0 ;查表数据送AMOVC A,@A+DPTR ;查表,得到显示代码ACALL SHIFT ;调移位子程序MOV A,LED1MOVC A,@A+DPTRACALL SHIFTMOV A,LED2MOVC A,@A+DPTRACALL SHIFTMOV A,LED3MOVC A,@A+DPTRACALL SHIFTMOV A,LED4MOVC A,@A+DPTRACALL SHIFTMOV A,LED5MOVC A,@A+DPTRACALL SHIFTMOV A,LED6MOVC A,@A+DPTRACALL SHIFTMOV A,LED7MOVC A,@A+DPTRACALL SHIFTRET;---------显示代码表---------TABLE: DB 11H,0D7H,32H,92H,0D4H,98H,18H,0D3H,10H,90H ;0,1,2,3,4,5,6,7,8,9, DB 50H,1CH,39H,16H,38H,78H, 0FFH,0FEH,0EFH ;10,11,12,13,14,15,灭,-;================移位子程序============================SHIFT: PUSH A ; 进栈暂存A值MOV R0,#8 ; 循环8次CLR C ;清进位标志CLR SCL ;时钟线,先钳位为0LP2: RLC AMOV SDA,CNOPNOPSETB SCLNOPNOPCLR SCLNOPNOPDJNZ R0,LP2POP A ; 出栈恢复A值RET;=============延时子程序=============== DELAY_1S:MOV R7,#0ffHLOOP7: MOV R6,#0ffHLOOP6: NOPNOPNOPNOPNOPNOPDJNZ R6,LOOP6DJNZ R7,LOOP7RET;------------------------------END。
C51单片机C语言程序设计单片机C语言程序设计是指使用C语言编写程序来控制和操作单片机的工作。
单片机是一种集成电路,它包含了中央处理器、存储器、输入输出接口等功能模块,广泛应用于嵌入式系统中。
在单片机C语言程序设计中,首先需要了解C语言的基本语法和语法规则。
C语言是一种面向过程的编程语言,具有简洁、高效和可移植等特点。
接下来,要熟悉单片机的硬件结构和寄存器的使用方法,了解单片机的输入输出方式、中断、定时器等功能。
在进行单片机C语言程序设计时,需要按照以下步骤进行:1.设置寄存器和引脚的初始化:根据单片机的型号和需要的功能,设置相关的寄存器和引脚的初始化。
这些初始化可以包括引脚的输入输出模式设置、中断向量表的初始化、定时器的设定等。
2.主程序的编写:主程序是单片机的执行入口,通过主程序可以完成各种功能的实现。
在主程序中,可以定义变量、函数和结构体等。
3.中断程序的编写:中断程序是由硬件触发的,可以在需要时被调用执行。
中断程序可以包括外部中断、定时器中断等。
在编写中断程序时,需要设置相应的中断向量,并完成相应的中断服务程序。
4.函数的编写:函数是实现其中一特定功能的代码段,通过函数可以提高程序的模块化和可重用性。
需要根据实际需求编写相应的函数,并在主程序中调用。
5. 调试和测试:在编写完程序后,需要进行调试和测试。
通过调试和测试可以发现程序中的bug和错误,并进行修复。
可以通过缓慢单步调试、观察变量值和输出结果等方式进行调试和测试。
6.优化和改进:在程序完成后,可以对程序进行优化和改进。
通过优化可以提高程序的性能和效率,减少资源的占用。
可以使用编译优化选项、减少不必要的计算和内存使用等方式进行优化。
以上是单片机C语言程序设计的基本步骤和内容。
在实际操作中,还需要根据具体的需求和硬件平台进行相应的调整和编程。
通过合理的设计和编程,可以实现单片机的各种功能和应用,广泛应用于电子设备、汽车、家电等领域。
无论是初学者还是有经验的程序员,都可以通过单片机C语言程序设计来进一步提高和拓展自己的技能。
C51单片机串口的使用方法解析很多朋友在使用单片机串口的时候存在着一定的问题,我根据自己的经验,给大家总结如下:串口调试经过调试,以上功能基本实现,目前可以通过上位机对单片机进行实时控制。
程序如下:这是一个单片机C51串口接收(中断)和发送例程,可以用来测试51单片机的中断接收和查询发送,另外我觉得发送没有必要用中断,因为程序的开销是一样的。
#i nclude#i nclude#i nclude#define INBUF_LEN 4 //数据长度unsigned char inbuf1[INBUF_LEN];unsigned char checksum,count3 ,flag,temp,ch;bit read_flag=0;sbit cp=P1 ;sbit DIR=P1 ;int i;unsigned int xdata *RAMDATA; /*定义RAM地址指针*/unsigned char a[6]={0x11,0x22,0x33,0x44,0x55,0x66} ;void init_serialcomm(void){SCON=0x50; //在11.0592MHz下,设置串行口波特率为9600,方式1,并允许接收PCON=0x00;ES=1;TMOD=0x21; //定时器工作于方式2,自动装载方式TH0=(65536-1000)%256;TL0=(65536-1000)/256;TL1=0xfd;TH1=0xfd;ET0=1;TR0=1;TR1=1;// TI=0;EA=1;// TI=1;RAMDATA=0x1F45;}void serial ()interrupt 4 using 3 {if(RI){ RI=0;ch=SBUF;TI=1; //置SBUF空switch(ch){case 0x01 :printf(“A”); TI=0;break; case 0x02 :printf(“B”); TI=0;break; case 0x03 :printf(“C”); TI=0;break; case 0x04 :printf(“D”); TI=0;break; default :printf(“fg”); TI=0;break; }}}//向串口发送一个字符void timer0()interrupt 1 using 3{ // char i;flag++;TH0=0x00;TL0=0x00;if(flag==10){// cp=!cp;// for(i=0;i《6;i++)P2=0x25;TI=1;temp=*RAMDATA;printf(“%c”,temp);TI=0;// RAMDATA--;flag=0;}}//主程序main(){init_serialcomm(); //初始化串口//向6264中送数据{*RAMDATA=0x33;}while(1){*RAMDATA=0x33;;}}调试过程中遇到的问题:1.发送过程:在发送时必须保证TI=1:即发送缓冲器为空,否则将导致数据发不出去,如果想强制发送可以用:TI=1.具体发送数据:利用printf(“akjdfaklfj”);函数直接发送即可。
c51程序设计心得
C51程序设计是指基于C51单片机的嵌入式系统开发。
在进行C51程序设计时,我认为有几个重要的方面需要考虑和总结心得。
首先,了解C51单片机的特性和指令集是非常重要的。
C51单片机是一种经典的8位单片机,具有特定的指令集和内部外设,包括GPIO、定时器、串口等。
熟悉这些特性可以帮助我们更好地利用C51单片机的功能进行程序设计。
其次,合理的程序结构和模块化设计是C51程序设计的关键。
在编写C51程序时,我们应该尽量遵循模块化的设计原则,将程序分解为多个模块,每个模块只负责特定的功能,这样不仅有利于代码的维护和扩展,也有利于团队协作和代码复用。
另外,对于C语言的应用也是C51程序设计的重要部分。
C语言是一种高级语言,可以帮助我们更快速地编写程序,并且具有良好的可移植性。
在C51程序设计中,我们可以充分利用C语言的特性,比如结构体、指针等,来简化程序设计和提高代码的可读性。
此外,调试和优化也是C51程序设计中需要重点关注的问题。
由于嵌入式系统的特殊性,对程序的调试和优化需要更加细致和深入。
我们可以通过单步调试、使用适当的调试工具和仪器来帮助我们找出程序中的问题,并且针对性地进行优化,以提高程序的性能和稳定性。
总的来说,C51程序设计需要我们全面理解单片机的特性,合理设计程序结构,熟练运用C语言,并且注重调试和优化。
通过不断的实践和总结,我们可以不断提高自己的C51程序设计能力,开发出高质量的嵌入式系统。