自动控制原理实验报告--典型二阶系统的时域特性
- 格式:docx
- 大小:367.44 KB
- 文档页数:4
实验一典型系统的时域响应和稳定性分析一、实验目的1.研究二阶系统的特征参量(ξ、ωn) 对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉Routh判据,用Routh判据对三阶系统进行稳定性分析。
二、实验设备PC机一台,TD-ACC+教学实验系统一套。
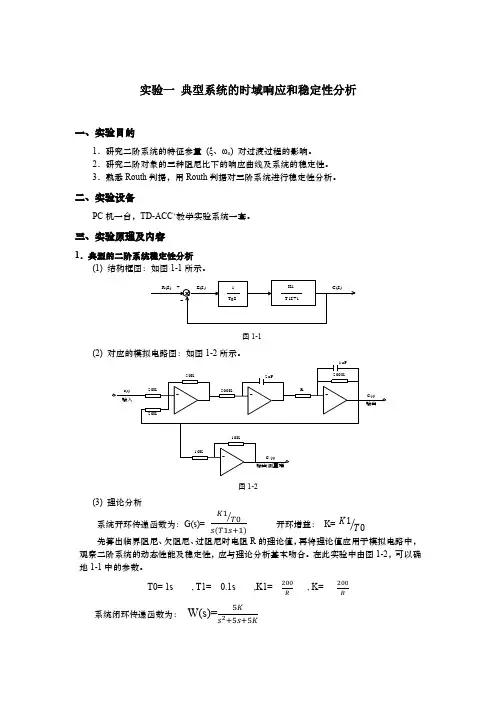
三、实验原理及内容1.典型的二阶系统稳定性分析(1) 结构框图:如图1-1所示。
图1-1(2)图1-2(3) 理论分析系统开环传递函数为:G(s)=K1T0⁄s(T1s+1)开环增益:K= K1T0⁄先算出临界阻尼、欠阻尼、过阻尼时电阻R的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。
在此实验中由图1-2,可以确地1-1中的参数。
T0= 1s , T1= 0.1s ,K1= 200R , K= 200R系统闭环传递函数为:W(s)=5Ks2+5s+5K其中自然振荡角频率:?n ω= 10√10R;阻尼比:?ζ= √10R402.典型的三阶系统稳定性分析(1) 结构框图:如图1-3所示。
图1-3(2) 模拟电路图:如图1-4所示。
图1-4(3) 理论分析系统的开环传函为: G(s)H(s)=20K s 3+12s 2+20s系统的特征方程为:1()()0G s H s += : s 3+12s 2+20s+20K=0 (4) 实验内容实验前由Routh 判断得Routh 行列式为:S 3 1 20 S 2 12 20K S 1 20-5/3*K 0 S 0 20K为了保证系统稳定,第一列各值应为正数,因此可以确定系统稳定 K 值的范围 : 0<K <12 R >41.7k系统临界稳定K: K=12 R =41.7k 系统不稳定K 值的范围: K >12 R <41.7k四、实验步骤1)将信号源单元的“ST ”端插针与“S ”端插针用“短路块”短接。

自动控制原理实验报告目录2.2典型环节模拟电路及其数学模型1. 实验目的2. 实验原理3. 实验内容4. 实验步骤5. 实验数据记录3.1典型二阶系统模拟电路及其动态性能分析1. 实验目的2. 实验原理3. 实验内容4. 实验步骤5. 实验数据纪录3.4三阶控制系统的稳定性分析1. 实验目的2. 实验原理3. 实验内容4. 实验步骤5. 实验数据记录3.5基于Matlab告诫控制系统的时域响应动态性能分析1. 实验目的2. 实验内容3. 实验数据纪录4.1基于Matlab控制系统的根轨迹及其性能分析1. 实验目的2. 实验原理3. 实验内容4. 实验步骤5. 实验数据记录5.4 基于MATLAB控制系统的博德图及其频域分析1. 实验目的2. 实验原理3. 实验内容4. 实验步骤5. 实验数据记录2.2典型环节模拟电路及其数学模型1.实验目的1)掌握典型环节模拟电路的构成,学习运用模拟电子组件构造控制系统。
2)观察和安装个典型环节的单位节阶跃响应曲线,掌握它们各自特性。
3)掌握各典型环节的特性参数的测量方法,并根据阶跃响应曲线建立传递函数。
2.实验原理本实验通过实验测试法建立控制系统的实验模型。
实验测试法是人为地给系统施加某种测试信号,记录基本输出响应,并用适当的数学模型区逼近。
常用的实验测试法有三种:时域测试法,频域测试法和统计相关测试法。
通过控制系统的时域测试,可以测量系统的静态特性和动态特性指标。
静态特性是指系统稳态是的输入与输出的关系,用静态特性参数来表征,如增益和稳态误差。
动态性能指标是表征系统输入一定控制信号,输出量随时间变化的响应,常用的动态性能指标有超调量、调节时间、上升时间、峰值时间和振荡次数等。
静态特性可以采用逐点测量法,及给新一个输入量,新颖测量被控对象的一个稳态输出量,利用一组数据绘出静态特性曲线求出其斜率,就可以确定被测对象的增益。
动态特性可以采用阶跃响应或脉冲响应测试法,给定被测对象施加阶跃输入信号或脉冲信号,利用示波器或记录仪测量被测对象的输出响应,如为使测量尽可能的得到理想的数学模型,应注意以下几点:1)被测对象应处于实际经常使用的负荷情况,并且在较为稳定的状态下进行测试。
实验一 线性系统时域特性分析一、实验目的1.掌握测试系统响应曲线的模拟实验方法。
2.研究二阶系统的特征参量ζ阻尼比和n ω自然频率对阶跃响应瞬态指标的影响。
二、实验设备与器件计算机一台,NI ELVIS Ⅱ多功能虚拟仪器综合实验平台一套,万用表一个,通用型运算放大器4个,电阻若干,电容若干,导线若干。
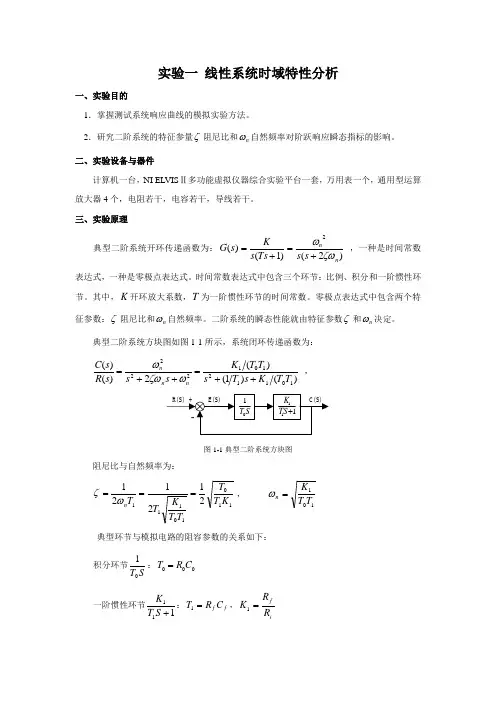
三、实验原理典型二阶系统开环传递函数为:)2()1()(2n ns s Ts s K s G ζωω+=+= ,一种是时间常数表达式,一种是零极点表达式。
时间常数表达式中包含三个环节:比例、积分和一阶惯性环节。
其中,K 开环放大系数,T 为一阶惯性环节的时间常数。
零极点表达式中包含两个特征参数:ζ阻尼比和n ω自然频率。
二阶系统的瞬态性能就由特征参数ζ和n ω决定。
典型二阶系统方块图如图1-1所示,系统闭环传递函数为:)()1()(2)()(10112101222T T K s T s T T K s s s R s C n n n ++=++=ωζωω ,图1-1典型二阶系统方块图阻尼比与自然频率为:11010111212121K T T T T K T T n ===ωζ, 101T T K n =ω典型环节与模拟电路的阻容参数的关系如下: 积分环节ST 01:000C R T = 一阶惯性环节111+S T K :f f C R T =1,if R R K =1四、实验内容Cf图1-2二阶系统闭环模拟电路图1.已知系统的模拟电路如图1-2所示,在NI ELVIS Ⅱ教学实验板上,利用运算放大器、电阻、电容自行搭建二阶模拟闭环系统。
阶跃信号由实验板模拟量输出接口AO0输出,接到二阶系统的输入端。
将二阶系统的输入端与输出端分别接实验板模拟量输入接口AI0(+)与AI1(+),采样阶跃输入信号与二阶系统的阶跃响应信号。
搭建模拟电路时,应特别注意:运算放大器的Vcc 与Vee 分别接实验板的+15V 与-15V ,正输入端IN+应接实验板的Ground ,实验板模拟量输入接口AI0(-)与AI1(-)应接实验板的Ground ,电容负端接运放负端输入IN-。
分组:成绩:__ _______北京航空航天大学自动控制原理实验报告实验一一、二阶系统的电子模拟及时域响应的动态测试学院专业方向班级学号学生姓名指导教师2014年11月目录一、实验目的 (1)二、实验内容 (1)三、实验原理 (1)四、实验设备 (2)五、实验步骤 (2)六、实验数据 (3)1.一阶系统实验数据及图形 (3)2.二阶系统实验数据及图形 (4)七、结论和误差分析 (6)结论: (6)误差分析: (7)八、收获与体会 (7)附录 (7)实验时间2014.11.1 同组同学 无一、实验目的1.了解一、二阶系统阶跃响应及其性能指标与系统参数之间的关系。
2.学习在电子模拟机上建立典型环节系统模型的方法。
3.学习阶跃响应的测试方法。
二、实验内容1.建立一阶系统的电子模型,观测并记录在不同时间常数T 时的阶跃响应曲线,并测定其过渡过程时间Ts 。
2.建立二阶系统的电子模型,观测并记录在不同阻尼比ζ时的阶跃响应曲线,并测定其超调量σ%及过渡过程时间Ts 。
三、实验原理1.一阶系统实验原理系统传递函数为:()()()1C S Ks R S TS φ==+模拟运算电路如图1所示:图1212R R Uo(s)K ==Ui(s)CSR +1Ts+1在实验中始终取R2=R1,则K=1,T=R2*C 取不同的时间常数T ,T=0.25s ,T=0.5s ,T=1s记录不同的时间常数下阶跃响应曲线,测量并记录其过渡时间Ts (Ts=3T )2.二阶系统实验原理 其传递函数为:222()()()(2)n n n C S S R S S S ωζωωΦ==++令1n ω=弧度/秒,二阶系统模拟线路下图2所示:图2取R2*C1=1,R3*C2=1,则R4/R3=R4*C2=1/(2*ζ)及ζ=1/(2*R4*C2)理论值:3(0.05)s nt ζω≈∆=,%σ100%e =⨯四、实验设备1. HHMN-1 型电子模拟机一台2. PC 机一台3. 数字式万用表一块。
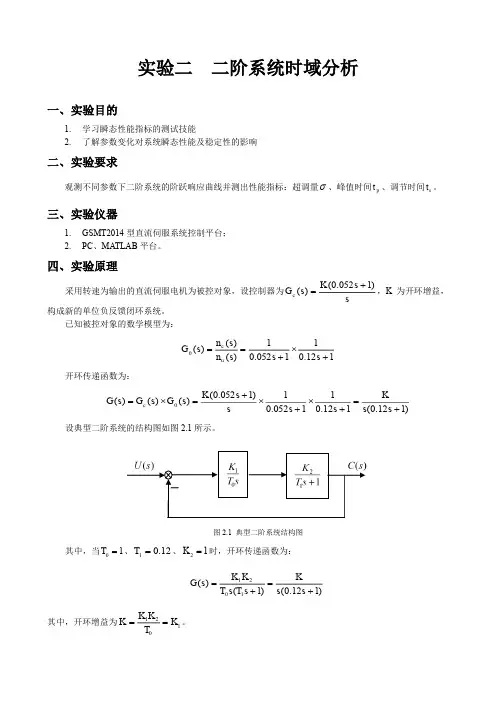
实验二 二阶系统时域分析一、 实验目的1. 学习瞬态性能指标的测试技能2. 了解参数变化对系统瞬态性能及稳定性的影响二、 实验要求观测不同参数下二阶系统的阶跃响应曲线并测出性能指标:超调量σ、峰值时间p t 、调节时间s t 。
三、 实验仪器1. GSMT2014型直流伺服系统控制平台;2. PC 、MA TLAB 平台。
四、 实验原理采用转速为输出的直流伺服电机为被控对象,设控制器为ss K s G c )1052.0()(+=,K 为开环增益,构成新的单位负反馈闭环系统。
已知被控对象的数学模型为:112.011052.01)()()(0+⨯+==s s s n s n s G u c 开环传递函数为:)112.0(112.011052.01)1052.0()()()(0+=+⨯+⨯+=⨯=s s Ks s s s K s G s G s G c 设典型二阶系统的结构图如图2.1所示。
图2.1 典型二阶系统结构图其中,当01T =、12.01=T 、21K =时,开环传递函数为:)112.0()1()(1021+=+=s s Ks T s T K K s G 其中,开环增益为1021K T K K K ==。
闭环传递函数为其中,1T K n =ω 11121T K =ξ (2.1) (1)当10<<ξ,即欠阻尼情况时,二阶系统的阶跃响应为衰减振荡,如图2.2中曲线1所示。
()1)(0)n T d C t t t ξωωθ=-+≥ (2.2)式中 21ξωω-=n d1tgθ-=峰值时间可由式(2.2)对时间求导,并令它为零,得:p d t πω== (2.3)超调量()()()p p C t C t C t σ∞∞-=,求得p eσ= (2.4)调节时间s t ,采用2%允许误差范围时,近似地等于系统时间常数1()n ξω⨯的四倍,即:n s t ξω4=(2.5)(2)当1=ξ,临界阻尼时,系统的阶跃响应为单调的指数曲线,如图2.2中曲线2所示)0()1(1)(≥+-=-t t e t C n t n ωω令输出为98.0可求得s t 。

自动控制原理实验报告实验一、典型环节的时域响应一.实验目的1.熟悉并掌握TD-ACC+(TD-ACS)设备的使用方法及各典型环节模拟控制电路的构成方法。
2.熟悉各种典型环节的理想阶跃曲线和实际阶跃响应曲线。
对比差异、分析原因。
3.了解参数变化对典型环节动态特性的影响。
二.实验设备PC机一台,TD-ACC+(TD-ACS)实验系统一套。
三.实验内容1.比例环节2.积分环节3.比例积分环节4.惯性环节5.比例微分环节6.比例积分微分环节四、实验感想在本次实验后,我了解了典型环节的时域响应方面的知识,并且通过实践,实现了时域响应相关的操作,感受到了实验成功的喜悦。
实验二、线性系统的矫正一、目的要求1.掌握系统校正的方法,重点了解串联校正。
2.根据期望的时域性能指标推导出二阶系统的串联校正环节的传递函数二、仪器设备PC 机一台,TD-ACC+(或 TD-ACS)教学实验系统一套。
三、原理简述所谓校正就是指在使系统特性发生变接方式,可分为:馈回路之内采用的测点之后和放1.原系统的结构框图及性能指标对应的模拟电路图2.期望校正后系统的性能指标3.串联校正环节的理论推导四、实验现象分析校正前:校正后:校正前:校正后:六、实验心得次实验让我进一步熟悉了TD-ACC+实验系统的使用,进一步学习了虚拟仪器,更加深入地学习了自动控制原理,更加牢固地掌握了相关理论知识,激发了我理论学习的兴趣。
实验三、线性系统的频率响应分析一、实验目的1.掌握波特图的绘制方法及由波特图来确定系统开环传函。
2.掌握实验方法测量系统的波特图。
二、实验设备PC机一台,TD-ACC+系列教学实验系统一套。
三、实验原理及内容(一)实验原理1.频率特性当输入正弦信号时,线性系统的稳态响应具有随频率(ω由0变至∞)而变化的特性。
频率响应法的基本思想是:尽管控制系统的输入信号不是正弦函数,而是其它形式的周期函数或非周期函数,但是,实际上的周期信号,都能满足狄利克莱条件,可以用富氏级数展开为各种谐波分量;而非周期信号也可以使用富氏积分表示为连续的频谱函数。
系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:典型系统的时域响应和稳定性分析实验时间:学生成绩:教师签名:批改时间:一、目的要求1.研究二阶系统的特征参量 (ξ、ωn) 对过渡过程的影响。
2.研究二阶对象的三种阻尼比下的响应曲线及系统的稳定性。
3.熟悉 Routh 判据,用 Routh 判据对三阶系统进行稳定性分析。
二、实验设备PC机一台,TD—ACC教学实验系统一套三、实验原理及内容1.典型的二阶系统稳定性分析(1) 结构框图:如图 1.2-1 所示。
图1.2-2(2) 对应的模拟电路图:如图 1.2-2 所示。
图1.2-2系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:(3) 理论分析系统开环传递函数为:;开环增益:(4) 实验内容先算出临界阻尼、欠阻尼、过阻尼时电阻 R 的理论值,再将理论值应用于模拟电路中,观察二阶系统的动态性能及稳定性,应与理论分析基本吻合。
在此实验中(图 1.2-2),系统闭环传递函数为:其中自然振荡角频率:2.典型的三阶系统稳定性分析(1) 结构框图:如图 1.2-3 所示。
系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:图 1.2-3(2)模拟电路图:如图 1.2-4 所示。
图 1.2-4(3)理论分析:系统的特征方程为:(4)实验内容:实验前由 Routh 判断得 Routh 行列式为:系别:机电工程学院专业:课程名称:自动控制原理实验班级:姓名:学号:组别:实验名称:实验时间:学生成绩:教师签名:批改时间:为了保证系统稳定,第一列各值应为正数,所以有五、实验步骤1.将信号源单元的“ST”端插针与“S”端插针用“短路块”短接。
由于每个运放单元均设臵了锁零场效应管,所以运放具有锁零功能。
自动控制原理实验报告姓名:xxx班号:xxxxxx学号:xxxxxxxxxx二阶系统时域分析已知:根据以下的二阶系统的原理图进行试验一、数学模型根据电路原理图推导数学模型(传递函数),分析稳定性、稳态误差、动态性能等。
依据图所示,得到下列方程:of U U =-1010K K 1()i f U U U =-+21111U U R C S=- 222221()1f R U U C S R R C S =-+ 消去中间项f U 、1U 、2U 得021*******i U U S S =++ ∴系统的闭环传递函数Φ(S )=021*******i U U S S =++分析系统稳定性: 系统特征方程()N s =210100S S ++。
构造劳斯表 2S 1 1001S 100S 10由劳斯表得,该系统稳定。
分析系统的稳态误差:由系统的闭环传递函数得系统的开环传递函数为()G s 210010S S =+, 故系统的稳态误差0lim ()()ss e s e S s R s φ→==01lim ()1()s S R s G s →+ 若输入为单位阶跃信号,即()R s =1S,则系统的稳态误差 ss e =011lim 1()s S G s S→+=22010lim 10100s S S S S →+++=0。
分析系统的动态性能:系统的闭环传递函数Φ(S )=021*******i U U S S =++,系统为二阶系统, 其n w =10,ξ=0.5∴系统的超调量为σ﹪=16.3﹪;调节时间s t =0.7(∆=0.05)。
二、实验结果可变电阻R=10K 时:可变电阻R=110K时:三、计算机仿真可变电阻R=10K时:可变电阻R=110K时:四、理论、仿真、实验结果的对比分析经过对比发现理论上的超调量与实验基本一致,但是调节时间差别较大,这是由于在计算过程中的舍入误差以及受实验设备精确度影响,使得两者的差别较大。
本科实验报告课程名称:自动控制原理实验项目:典型二阶系统的时域特性实验地点:电机馆自控实验室专业班级:学号:学生姓名:指导教师:2012 年5 月15 日一、实验目的和要求:学会利用自动控制实验箱对二阶控制系统进行时域分析。
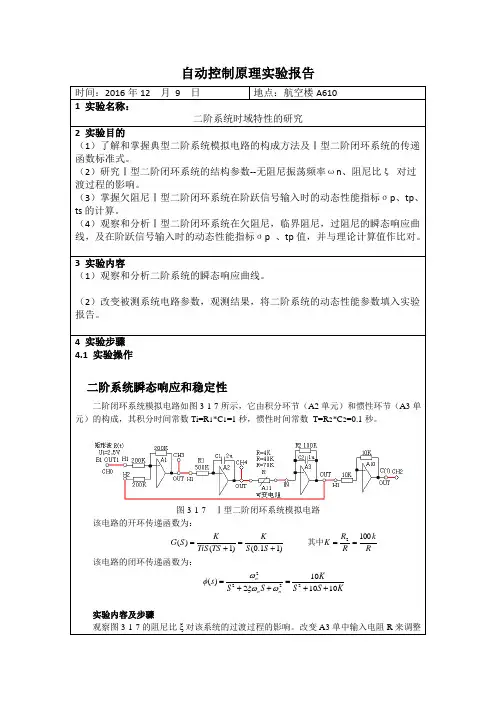
二、实验内容和原理:1、二阶系统动态特性的测试1. 典型二阶系统的方框图和模拟电路图① 典型二阶系统的方框图及传函图1-2是典型二阶系统的原理方框图,其中T 0=1s ,T 1=0.1s ,K 1分别为10、5、2.5和1。
开环传函: )11.0()1()(11+=+=s s K s T s K s G 其中:===101/K T K K 开环增益。
闭环传函: 2nn 22n 2)(ωζωω++=s s s W 其中:2//;/110011n T K T T T K ==ξω表1-2列出有关二阶系统在三种情况(欠阻尼、临界阻尼和过阻尼)下具体参数的表达式,以便计算理论值。
② 模拟电路图见图1-3。
三、主要仪器设备:TDN-AC/ACS+型控制系统实验箱一套、安装Windows 98系统和ACS2002应用软件的计算机一台。
四、操作方法与实验步骤:准备:将“信号源单元”(U1SG)的ST插针和+5V插针用“短路块”短接,使运算放大器反馈网络上的场效应管3DJ6夹断。
二阶系统瞬态性能指标的测试步骤:①按图1-3接线,R=10K。
②用示波器观察系统阶跃响应C(t),测量并记录超调量M p,峰值时间T p和调节时间t s,并记录在表1-3中。
③分别按R=20K;40K;100K改变系统开环增益,观察响应的阶跃响应C(t),测量并记录性能指标M p,T p和t s,及系统的稳定性。
并将测量值和计算值(实验前必须按公式计算出)进行比较,参数取值及响应曲线,详见表1-3。
五、实验数据记录和处理:(1)R=50K阶跃响应图:(2)R=100K阶跃响应图:六、讨论、心得:通过实验,让我对二阶系统的时域响应有了进一步的了解,也对这种新的实验方法有了进一步的认识,自控是一门不错的课,希望今后能有更多的机会去实践它。
实验三 二阶系统的动态响应分析实验指导书一、实验目的1.学习和掌握二阶系统动态性能指标的测试方法。
2.研究典型二阶系统参数对系统动态性能和稳定性的影响。
二、实验内容1.根据二阶系统的工作原理框图(动态结构方框图)建立matlab/simulink 仿真模型; 2.观测二阶系统的阶跃响应,测出其超调量和调节时间,并研究其参数变化对动态性能和稳定性的影响。
三、实验步骤1.建立由一个积分环节和一个惯性环节组成的二阶闭环系统的模型; 2.观测该二阶系统模拟电路的阶跃特性,并测出其超调量和调节时间; 3.改变该二阶系统模拟电路的参数,观测参数对系统动态性能的影响。
4.分析实验结果,完成实验报告。
四、附录1.典型二阶系统典型二阶系统的动态结构方框图如图3.1所示:其开环传递函数为1()(1)KG S S T S =+,10K K T =图3.1图3.2其闭环传递函数为11112111111121222111111()1(1)11212o o o o o o nn n o n n K T s T s K K s K T s T s K T T s T s K T s T s K T T w K s w s w s s T T T w w T ϕξξ+===++++++==++++===自然角频率阻尼比,其中n ω=ξ=取二阶系统的模拟电路如图3.2所示:(1) 比例环节1200()2100G S == (2) 比例积分环节121111()200o o C S G S R R C S s===(3)比例惯性环节 22312111()(1)100(1)x x x x x x R C s R R R C s G s R R C s R R s +===++(4)比例环节4()1R GS R==前向通道传递函数:123442()()()()()12200100(1)11010000(1)x x xx xG s G s G s G s G s R s R s R ss R s s R ==+==++系统的传递函数:4242424110()()11()1011010x xxss R G S s G S ss R s s R φ--+==+++=++210n w -==211502210n x x w R R ξ-===当ξ=1 ,系统为临界阻尼; 当ξ>1,系统为过阻尼; 当0<ξ<1,系统为欠阻尼; 当ξ=0,系统为无阻尼改变元件参数Rx大小,研究不同参数特征下的时域响应。
本科实验报告
课程名称:自动控制原理
实验项目:典型二阶系统的时域特性实验地点:电机馆自控实验室
专业班级:学号:
学生姓名:
指导教师:
2012 年5 月15 日
一、实验目的和要求:
学会利用自动控制实验箱对二阶控制系统进行时域分析。
二、实验内容和原理:
1、二阶系统动态特性的测试
1. 典型二阶系统的方框图和模拟电路图
① 典型二阶系统的方框图及传函
图1-2是典型二阶系统的原理方框图,其中T 0=1s ,T 1=0.1s ,K 1分别为10、5、2.5和1。
开环传函: )
11.0()1()(11+=+=s s K s T s K s G 其中:===101/K T K K 开环增益。
闭环传函: 2n
n 22n 2)(ωζωω++=s s s W 其中:2//;/110011n T K T T T K ==ξω
表1-2列出有关二阶系统在三种情况(欠阻尼、临界阻尼和过阻尼)下具体参数的表达式,以便计算理论值。
② 模拟电路图见图1-3。
三、主要仪器设备:
TDN-AC/ACS+型控制系统实验箱一套、安装Windows 98系统和ACS2002应用软件的计算机一台。
四、操作方法与实验步骤:
准备:将“信号源单元”(U1SG)的ST插针和+5V插针用“短路块”短接,使运算放大器反馈网络上的场效应管3DJ6夹断。
二阶系统瞬态性能指标的测试步骤:
①按图1-3接线,R=10K。
②用示波器观察系统阶跃响应C(t),测量并记录超调量M p,峰值时间T p和调节时间t s,并记录在表1-3中。
③分别按R=20K;40K;100K改变系统开环增益,观察响应的阶跃响应C(t),测量并记录性能指标M p,T p和t s,及系统的稳定性。
并将测量值和计算值(实验前必须按公式计算出)进行比较,参数取值及响应曲线,详见表1-3。
五、实验数据记录和处理:
(1)R=50K阶跃响应图:
(2)R=100K阶跃响应图:
六、讨论、心得:
通过实验,让我对二阶系统的时域响应有了进一步的了解,也对这种新的实验方法有了进一步的认识,自控是一门不错的课,希望今后能有更多的机会去实践它。