必修4--三角函数所有知识点归纳总结材料
- 格式:doc
- 大小:1.04 MB
- 文档页数:13

《三角函数》一、任意角的概念与弧度制1、将沿x 轴正向的射线,围绕原点旋转所形成的图形称作角. 逆时针旋转为正角,顺时针旋转为负角,不旋转为零角2、同终边的角可表示为{}()360k k Z ααβ︒=+∈gx 轴上角:{}()180k k Z αα=∈o gy 轴上角:{}()90180k k Z αα=+∈o o g3、第一象限角:{}()036090360k k k Z αα︒︒+<<+∈o g g第二象限角:{}()90360180360k k k Z αα︒︒+<<+∈o o g g第三象限角:{}()180360270360k k k Z αα︒︒+<<+∈oo g g第四象限角:{}()270360360360k k k Z αα︒︒+<<+∈oo g g4、区分第一象限角、锐角以及小于90o的角 第一象限角:{}()036090360k k k Z αα︒︒+<<+∈o g g锐角:{}090αα<<o小于90o的角:{}90αα<o5、若α为第二象限角,那么2α为第几象限角? ππαππk k 222+≤≤+ππαππk k +≤≤+224,24,0παπ≤≤=k ,2345,1παπ≤≤=k所以2α在第一、三象限6、弧度制:弧长等于半径时,所对的圆心角为1弧度的圆心角,记作1rad .7、角度与弧度的转化:01745.01801≈=︒π 815730.571801'︒=︒≈︒=π9、弧长与面积计算公式弧长:l R α=⨯;面积:21122S lRR α=⨯=⨯,注意:这里的α均为弧度制.二、任意角的三角函数1、正弦:sin y r α=;余弦cos x r α=;正切tan yxα=其中(),x y 为角α终边上任意点坐标,22r x y =+.2、三角函数值对应表:3、三角函数在各象限中的符号口诀:一全正,二正弦,三正切,四余弦.(简记为“全s t c ”)sin α tan α cos α 第一象限:0,0.>>y x sin α>0,cos α>0,tan α>0, 第二象限:0,0.><y x sin α>0,cos α<0,tan α<0, 第三象限:0,0.<<y x sin α<0,cos α<0,tan α>0, 第四象限:0,0.<>y x sin α<0,cos α>0,tan α<0,度0o 30o 45o 60o 90o 120o 135o 150o 180o︒270360o弧度6π 4π 3π 2π 23π 34π 56π π32π 2πsin α122232132 22121cos α132 221212- 22- 32-1- 0 1tan α 0331 3无3-1-33-无ry)(x,αP4、同角三角函数基本关系式22sin cos 1αα+=sin tan tan cot 1cos ααααα=⇒=g ααααcos sin 21)cos (sin 2+=+ ααααcos sin 21)cos (sin 2-=-(ααcos sin +,ααcos sin -,ααcos sin •,三式之间可以互相表示)5.诱导公式口诀:奇变偶不变,符号看象限(所谓奇偶指的是απ+2n 中整数n 的奇偶性,把α看作锐角)212(1)sin ,sin()2(1)s ,n n n n co n απαα-⎧-⎪+=⎨⎪-⎩为偶数为奇数;212(1)s ,s()2(1)sin ,nn co n n co n απαα+⎧-⎪+=⎨⎪-⎩为偶数为奇数. ①.公式(一):α与()2,k k Z απ+∈απαsin )2sin(=+k ;απαcos )2cos(=+k ;απαtan )2tan(=+k②.公式(二):α与α-()sin sin αα-=-;()cos cos αα-=;()tan tan αα-=-③.公式(三):α与πα+()sin sin παα+=-;()cos cos παα+=-;()tan tan παα+=④.公式(四):α与πα-()sin sin παα-=;()cos cos παα-=-;()tan tan παα-=-⑤.公式(五):α与2πα+sin cos 2παα⎛⎫+= ⎪⎝⎭;cos sin 2παα⎛⎫+=- ⎪⎝⎭; ⑥.公式(六):α与2πα-sin cos 2παα⎛⎫-= ⎪⎝⎭;cos sin 2παα⎛⎫-= ⎪⎝⎭; ⑦.公式(七):α与32πα+3sin cos 2παα⎛⎫+=- ⎪⎝⎭;3cos sin 2παα⎛⎫+= ⎪⎝⎭; ⑧.公式(八):α与32πα- 3sin cos 2παα⎛⎫-=- ⎪⎝⎭;3cos sin 2παα⎛⎫-=- ⎪⎝⎭;三、三角函数的图像与性质1、将函数sin y x =的图象上所有的点,向左(右)平移ϕ个单位长度,得到函数()sin y x ϕ=+的图象;再将函数()sin y x ϕ=+的图象上所有点的横坐标伸长(缩短)到原来的1ω倍(纵坐标不变),得到函数()sin y x ωϕ=+的图象;再将函数()sin y x ωϕ=+的图象上所有点的纵坐标伸长(缩短)到原来的A 倍(横坐标不变),得到函数()sin y A x ωϕ=+的图象。
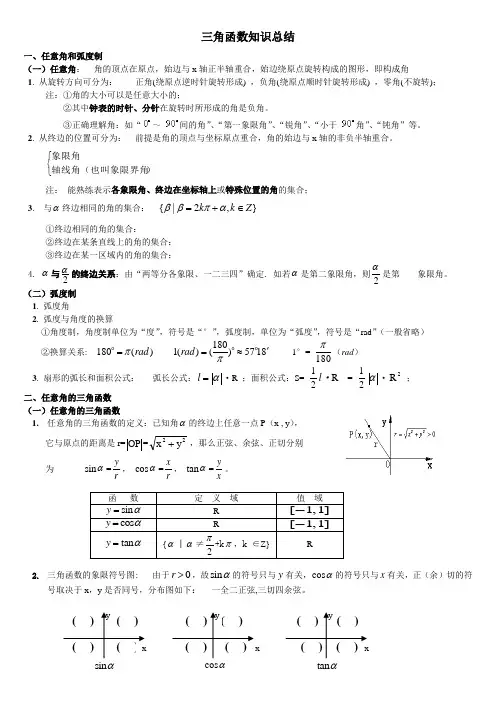
三角函数知识总结一、任意角和弧度制(一)任意角: 角的顶点在原点,始边与x 轴正半轴重合,始边绕原点旋转构成的图形,即构成角1. 从旋转方向可分为: 正角(绕原点逆时针旋转形成) ,负角(绕原点顺时针旋转形成) ,零角(不旋转);注:①角的大小可以是任意大小的;②其中钟表的时针、分针在旋转时所形成的角是负角。
③正确理解角:如“~间的角”、“第一象限角”、“锐角”、“小于角”、“钝角”等。
2. 从终边的位置可分为: 前提是角的顶点与坐标原点重合,角的始边与x 轴的非负半轴重合。
⎩⎨⎧)轴线角(也叫象限界角象限角注: 能熟练表示各象限角、终边在坐标轴上或特殊位置的角的集合; 3. 与α终边相同的角的集合: },2|{Z k k ∈+=απββ ①终边相同的角的集合:②终边在某条直线上的角的集合: ③终边在某一区域内的角的集合:4. α与2α的终边关系:由“两等分各象限、一二三四”确定. 如若α是第二象限角,则2α是第____象限角。
(二)弧度制1. 弧度角2. 弧度与角度的换算①角度制,角度制单位为“度”,符号是“°”,弧度制,单位为“弧度”,符号是“rad ”(一般省略)②换算关系: 180180()1()()5718rad rad ππ'==≈1°= 180π(rad )3. 扇形的弧长和面积公式: 弧长公式:l =α·R ;面积公式:S= 21l ·R = 21α·2R ;二、任意角的三角函数(一)任意角的三角函数1. 任意角的三角函数的定义:已知角α的终边上任意一点P (x , y ),它与原点的距离是r=OP =22y x +,那么正弦、余弦、正切分别为 sin α=y r , cos α=x r , tan α=y x。
2. 三角函数的象限符号图: 由于0r >,故sin α的符号只与y 有关,cos α的符号只与x 有关,正(余)切的符号取决于x ,y 是否同号,分布图如下: 一全二正弦,三切四余弦。
高中数学必修 4 知识点总结第一章三角函数正角 : 按逆时针方向旋转形成的角1、任意角负角:按顺时针方向旋转形成的角零角 : 不作任何旋转形成的角2、象限角:角的极点与原点重合,角的始边与x 轴的非负半轴重合,终边落在第几象限,那么称为第几象限角.第一象限角的会集为k 360o k 360o90o , k第二象限角的会集为k 360o90o k360o180o, k第三象限角的会集为k 360o 180o k360o270o , k第四象限角的会集为k 360o270o k360o360o, k终边在 x 轴上的角的会集为k 180o , k终边在 y 轴上的角的会集为k180o90o , k终边在坐标轴上的角的会集为k 90o, k3、终边相等的角:与角终边相同的角的会集为k 360o, k4、是第几象限角,确定n*所在象限的方法:先把各象限均分 n 等n份,再从 x 轴的正半轴的上方起,依次将各地域标上一、二、三、四,那么原来是第几象限对应的标号即为终边所落在的地域.n例 4.设角属于第二象限,且cos2cos2,那么角属于〔〕2A .第一象限B.第二象限C.第三象限D.第四象限解.C 2k22k,( k Z ), k4k,( k Z ),22当 k2n,( n Z)时,在第一象限;当 k2n1,(n Z ) 时,在第三象限;22而 cos cos cos20,在第三象限;2225、1 弧度:长度等于半径长的弧所对的圆心角叫做1弧度.- 1 -6、半径为 r 的圆的圆心角所对弧的长为 l ,那么角的弧度数的绝对值是l .ro7、弧度制与角度制的换算公式:2360o , 1o, 1180o.1808、假设扇形的圆心角为为弧度制 ,半径为 r ,弧长为 l ,周长为 C ,面积为 S , 那么弧长l r ,周长 C 2r l ,面积 S 1 lr 1 r 2 .2 2 9、设是一个任意大小的角,的终边上任意一点的坐标是 x, y ,它与原点的距离是 r r x 2y 20 ,那么 siny, cosx, tany x 0 . r r x10、三角函数在各象限的符号:第一象限全为正,第二象限正弦为正,第三象限正切为正,第四象限余弦为正. 11、三角函数线: sin , cos , tan . y例 7.设 MP 和 OM 分别是角17的正弦线和余弦线,那么给出的以下P T18不等式: ① MP OM 0;②OM 0 MP ; ③OMMP 0 ;OM Ax④ MP0 OM ,其中正确的选项是_____________________________ 。
高中数学必修4《三角函数》知识点与易错点归纳知识点(一)任意角和弧度制1.与θ终边相同的角的集合是 ;第一或第三象限角的集合是 ;x 轴上的角的集合是 ;2.若α是锐角,则πα-是第 象限角;πα+是第 象限角;2πα-是第 象限角;α-是第 象限角;32πα-是第 象限角;2πα+是第 象限角。
3.180°=π;1°= 弧度; 1弧度= ;圆心角α弧度数的绝对值||α= ;扇形面积公式S = 。
4.角ααcos 2=-,则2α角是 象限角。
知识点二.任意角的三角函数1.任意角的三角函数的定义:设α是任意一个角,(,)P x y 是α的终边上的任意一点(异于原点),它与原点的距离是0r =>,那么sin α= ,cos α= ,tan α= 。
2.如图,三角函数线:正弦线是 、余弦线是 、正切线是 ;4.已知角α的终边经过点(3,4)P -,则sin tan αα+的值为 ; 5.函数sin cos tan |sin ||cos ||tan |y αααααα=++的值域是 ; 6.sin cos θθ<⇔ ;sin cos θθ>⇔ 。
知识点三.同角三角函数的基本关系式及诱导公式1.平方关系:22sin cos αα+= ;商数关系:tan α= ;2.已知tan 2α=,则ααααcos sin cos 3sin +-= ;sin cos αα⋅= ;4.1419costan()34ππ+-的值为 ; 5.化简23sin (180)cos(360)sin(270)cos (180)cos(90)tan(180)αααααα+⋅-⋅-=--⋅+⋅+ 。
yTA xα B SO M P知识点四.正弦、余弦、正切公式及倍角公式1.基本公式及变式()()22222sin sin cos cos sin sin 22sin cos 1sin 2(sin cos )cos cos cos sin sin cos2cos sin 2cos 112sin t αβαβαβαβαβαααααααβαβαβααααα==±=±−−−→=⇒±=±±=−−−→=-=-=-↓↓令令 ()222tan tan 2tan 1+cos21cos2an tan 2cos sin 1tan tan 1tan 22αβααααβααααβα±-±=→=- = ,=变式:1tantan tan tan()(1tan tan),tan()1tan4απαβαβαβαα++=+⋅-⋅=+-;sin cos ),sin 2sin(cos 2sin()436πππθθθθθθθθθ±=±±=±±=±2.4411111212cos sin ππ-= ;sin163sin 223sin 253sin313+= ; 3.在ABC ∆中,53sin ,cos 135A B ==,则cos C = ; 4.在直角ABC ∆中,sin sin A B ⋅的最大值为 ;5.已知等腰三角形的一个底角的正弦值为13,则这个三角形的顶角的余弦值是 。
三角函数部分知识点总结1.1任意角和弧度制⎪⎩⎪⎨⎧零角负角:顺时针防线旋转正角:逆时针方向旋转任意角..12.象限角:在直角坐标系中,使角的顶点与原点重合,角的始边与x 轴的非负半轴重合,角的终边在第几象限,就说这个角是第几象限的角。
如果角的终边在坐标轴上,就认为这个角不属于任何象限。
3. ①与α(0°≤α<360°)终边相同的角的集合:{}Z k k ∈+⨯=,360|αββ ②终边在x 轴上的角的集合: {}Z k k ∈⨯=,180| ββ ③终边在y 轴上的角的集合:{}Z k k ∈+⨯=,90180| ββ ④终边在坐标轴上的角的集合:{}Z k k ∈⨯=,90| ββ⑤终边在y =x 轴上的角的集合:{}Z k k ∈+⨯=,45180| ββ ⑥终边在x y -=轴上的角的集合:{}Z k k ∈-⨯=,45180| ββ⑦若角α与角β的终边关于x 轴对称,则角α与角β的关系:Z k k ∈-=,βα 360⑧若角α与角β的终边关于y 轴对称,则α与角β的关系:Z k k ∈-+=,βα180360⑨若角α与角β的终边在一条直线上,则α与角β的关系:Z k k ∈+=,βα 180⑩角α与角β的终边互相垂直,则α与角β的关系:Z k k ∈++=, 90180βα 4. 弧度制:把等于半径长的圆弧所对的圆心角叫做一弧度。
360度=2π弧度。
若圆心角所对的弧长为l ,则其弧度数的绝对值|rl=α,其中r 是圆的半径。
5. 弧度与角度互换公式: 1rad =(π180)°≈57.30° 1°=180π 注意:正角的弧度数为正数,负角的弧度数为负数,零角的弧度数为零.6.第一象限的角:⎭⎬⎫⎩⎨⎧∈+<<Z k k k ,222|ππαπα锐角:⎭⎬⎫⎩⎨⎧<<20|παα ; 小于o 90的角:⎭⎬⎫⎩⎨⎧<2|παα(包括负角和零角)7. 弧长公式:||l R α= 扇形面积公式:211||22S lR R α==§1.2任意角的三角函数1. 任意角的三角函数的定义:设α是任意一个角,P (,)x y 是α的终边上的任意一点(异于原点),它与原点的距离是r =>,那么s i n,cyx rrαα==,()tan ,0yx xα=≠ 三角函数值只与角的大小有关,而与终边上点P 的位置无关。
高中数学必修4知识点总结第一章 三角函数⎧⎪⎨⎪⎩正角:按逆时针方向旋转形成的角1、任意角负角:按顺时针方向旋转形成的角零角:不作任何旋转形成的角2、象限角:角α的顶点与原点重合,角的始边与x 轴的非负半轴重合,终边落在第几象限,则称α为第几象限角.第一象限角的集合为{}36036090,k k k αα⋅<<⋅+∈Z第二象限角的集合为{}36090360180,k k k α⋅+<⋅+∈Z第三象限角的集合为{}360180360270,k k k αα⋅+<<⋅+∈Z第四象限角的集合为{}360270360360,k k k αα⋅+<<⋅+∈Z终边在x 轴上的角的集合为{}180,k k αα=⋅∈Z终边在y 轴上的角的集合为{}18090,k k αα=⋅+∈Z终边在坐标轴上的角的集合为{}90,k k αα=⋅∈Z3、终边相等的角:与角α终边相同的角的集合为{}360,k k ββα=⋅+∈Z4、已知α是第几象限角,确定()*n nα∈N 所在象限的方法:先把各象限均分n 等份,再从x 轴的正半轴的上方起,依次将各区域标上一、二、三、四,则α原来是第几象限对应的标号即为n α终边所落在的区域.例4.设α角属于第二象限,且2cos2cosαα-=,则2α角属于( ) A .第一象限 B .第二象限 C .第三象限 D .第四象限 解.C 22,(),,(),2422k k k Z k k k Z ππαππαππππ+<<+∈+<<+∈当2,()k n n Z =∈时,2α在第一象限;当21,()k n n Z =+∈时,2α在第三象限; 而coscoscos0222ααα=-⇒≤,2α∴在第三象限;5、1弧度:长度等于半径长的弧所对的圆心角叫做1弧度.6、半径为r 的圆的圆心角α所对弧的长为l ,则角α的弧度数的绝对值是lrα=. 7、弧度制与角度制的换算公式:2360π= ,1180π= ,180157.3π⎛⎫=≈ ⎪⎝⎭. 8、若扇形的圆心角为()αα为弧度制,半径为r ,弧长为l ,周长为C ,面积为S ,则弧长l r α=,周长2C r l =+,面积21122S lr r α==.9、设α是一个任意大小的角,α的终边上任意一点P 的坐标是(),x y ,它与原点的距离是()0r r =>,则sin y r α=,cos x r α=,()tan 0yx xα=≠. 10、三角函数在各象限的符号:第一象限全为正,第二象限正弦为正,第三象限正切为正,第四象限余弦为正.11、三角函数线:sin α=MP ,cos α=OM ,tan α=AT .例7.设MP 和OM 分别是角1817π不等式:①0<<OM MP ;②0O M M P <<; ③0<<MP OM ;④OM MP <<0,其中正确的是_____________________________。
第一章 高一数学必修4:三角函数(知识点梳理)三角函数不作任何旋转形成的角:零角按顺时针方向旋转形成的角:、任意角负角1按逆时针方向旋转形成的角:正角⎩⎪⎨⎪⎧2、象限的角:在直角坐标系内,顶点与原点重合,始边与x 轴的非负半轴重合,角的终边落在第几象限,就是第几象限的角;角的终边落在坐标轴上,这个角不属于任何象限,叫做轴线角。
第一象限角的集合为⋅<<⋅+∈Z ααk k k 36036090,}{第二象限角的集合为⋅+<⋅+∈Z αk k k 36090360180,}{第三象限角的集合为⋅+<<⋅+∈Z ααk k k 360180360270,}{ 第四象限角的集合为⋅+<<⋅+∈Z ααk k k 360270360360,}{ 终边在x 轴上的角的集合为=⋅∈Z ααk k 180,}{终边在y 轴上的角的集合为=⋅+∈Z ααk k 18090,}{ 终边在坐标轴上的角的集合为=⋅∈Z ααk k 90,}{3、与角α终边相同的角,连同角α在内,都可以表示为集合{αββ|360,∈⋅+=Z k k } 4、弧度制:(1)定义:等于半径的弧所对的圆心角叫做1弧度的角,用弧度做单位叫弧度制。
半径为r 的圆的圆心角α所对弧的长为l ,则角α的弧度数的绝对值是=αrl. (2)度数与弧度数的换算:=o 3602π,180=π rad ,1 rad π=≈= (180)57.185730'注:角度与弧度的相互转化:设一个角的角度为n o,弧度为α;①角度化为弧度:=⋅=o o o n n n ππ180180,②弧度化为角度:ααπαπ=⋅=⎛⎝ ⎫⎭⎪180180oo(3)若扇形的圆心角为α(α是角的弧度数),半径为r ,则:弧长公式: ①=l n π(用度表示的)180,② =α||r l (用弧度表示的); 扇形面积:①=πs r n 扇用度表示的2360()② 扇α==212||12r S lr (用弧度表示的)5、三角函数:(1)定义①:设α是一个任意大小的角,α是x y ,(),它与原点的距离是==>r OP r 0)(,则=αr y sin ,=αr x cos ,=≠αxx ytan 0() 定义②:设α是一个任意角,它的终边与单位圆交于点P 那么v 叫做α的正弦,记作sin α,即sin α=y ;u 叫做α弦,记作cos α,即cos α=x ; 当α的终边不在y 轴上时,y x 叫做α的正切,记作tan α, 即tan α=y x. (2)三角函数值在各象限的符号:口诀:全正,S 正,T 正,C口诀:第一象限全为正;二正三切四余弦. (3)特殊角的三角函数值sin αx y + + _ _ O x y + + _ _ cos α Otan α x y++_ _ O(4)三角函数线:如下图(5)同角三角函数基本关系式(1)平方关系:αα=+221cos sin (2)商数关系:=tan sin cos ααα6、三角函数的诱导公式:+=πααk 1sin 2sin ()(),+=πααk cos 2cos (),+=∈Z πααk k tan 2tan ()().口诀:终边相同的角的同一三角函数值相等.-=-αα2sin sin ()(),-=ααcos cos (),-=-ααtan tan (). -=παα3sin sin ()(),-=-πααcos cos (),-=-πααtan tan ().+=-παα4sin sin ()(),+=-πααcos cos (),+=πααtan tan (). -=-παα5sin 2sin ()(),-=πααcos 2cos (),-=-πααtan 2tan ().口诀:函数名称不变,正负看象限.⎝⎭⎪-=⎛⎫ααπ26sin cos (),⎝⎭ ⎪-=⎛⎫ααπ2cos sin ,⎝⎭ ⎪-=⎛⎫ααπ2tan cot . ⎝⎭⎪+=⎛⎫ααπ27sin cos (),⎝⎭ ⎪+=-⎛⎫ααπ2sin cos ,⎝⎭⎪+=-⎛⎫ααπ2cot tan . 口诀:正弦与余弦互换,正负看象限.诱导公式记忆口诀:“奇变偶不变,符号看象限”。
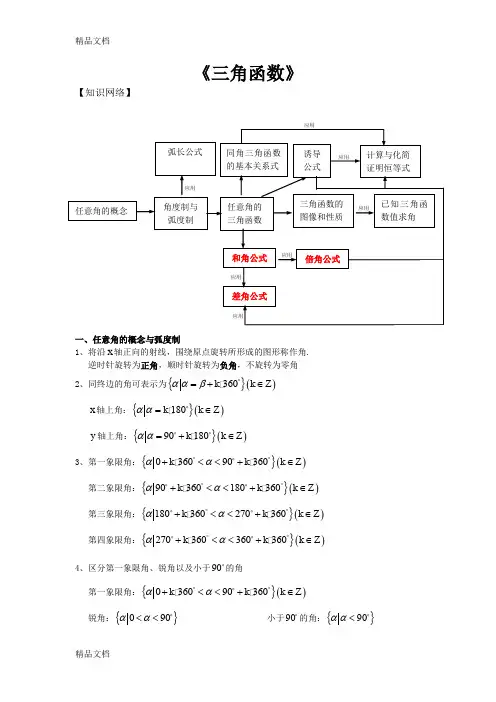
《三角函数》【知识网络】一、任意角的概念与弧度制1、将沿x 轴正向的射线,围绕原点旋转所形成的图形称作角. 逆时针旋转为正角,顺时针旋转为负角,不旋转为零角2、同终边的角可表示为{}()360k k Z ααβ︒=+∈x 轴上角:{}()180k k Z αα=∈ y 轴上角:{}()90180k k Z αα=+∈3、第一象限角:{}()036090360k k k Z αα︒︒+<<+∈第二象限角:{}()90360180360k k k Z αα︒︒+<<+∈ 第三象限角:{}()180360270360k k k Z αα︒︒+<<+∈ 第四象限角:{}()270360360360k k k Z αα︒︒+<<+∈4、区分第一象限角、锐角以及小于90的角 第一象限角:{}()036090360k k k Z αα︒︒+<<+∈锐角:{}090αα<< 小于90的角:{}90αα<任意角的概念弧长公式 角度制与 弧度制 同角三角函数的基本关系式 诱导 公式 计算与化简 证明恒等式任意角的 三角函数 三角函数的 图像和性质 已知三角函数值求角和角公式 倍角公式 差角公式 应用应用 应用 应用应用 应用 应用5、若α为第二象限角,那么2α为第几象限角? ππαππk k 222+≤≤+ππαππk k +≤≤+224,24,0παπ≤≤=k ,2345,1παπ≤≤=k所以2α在第一、三象限6、弧度制:弧长等于半径时,所对的圆心角为1弧度的圆心角,记作1rad .7、角度与弧度的转化:01745.01801≈=︒π 815730.571801'︒=︒≈︒=π8、角度与弧度对应表: 角度 0︒ 30︒ 45︒ 60︒90120︒ 135︒ 150︒ 180︒ 360︒弧度6π 4π 3π 2π 23π 34π 56π π2π9、弧长与面积计算公式 弧长:l R α=⨯;面积:21122S l R R α=⨯=⨯,注意:这里的α均为弧度制.二、任意角的三角函数1、正弦:sin y r α=;余弦cos x r α=;正切tan yxα=其中(),x y 为角α终边上任意点坐标,22r x y =+.2、三角函数值对应表:3、三角函数在各象限中的符号口诀:一全正,二正弦,三正切,四余弦.(简记为“全s t c ”) 度0 30 45 60 90 120 135 150 180︒270360弧度6π 4π 3π 2π 23π 34π 56π π32π 2πsin α 01222 32132 22121 0cos α132 22 12 012- 22- 32- 1- 0 1tan α 03313无 3-1-33-无ry)(x,αPsin α tan α cos α 第一象限:0,0.>>y x sin α>0,cos α>0,tan α>0, 第二象限:0,0.><y x sin α>0,cos α<0,tan α<0, 第三象限:0,0.<<y x sin α<0,cos α<0,tan α>0, 第四象限:0,0.<>y x sin α<0,cos α>0,tan α<0,4、三角函数线设任意角α的顶点在原点O ,始边与x 轴非负半轴重合,终边与单位圆相交与P (,)x y , 过P 作x 轴的垂线,垂足为M ;过点(1,0)A 作单位圆的切线,它与角α的终边或其反向 延长线交于点T.由四个图看出:当角α的终边不在坐标轴上时,有向线段,OM x MP y ==,于是有sin 1y y y MP r α====, c o s 1x x x OM r α====, tan y MP ATAT x OM OAα====.我们就分别称有向线段,,MP OM AT 为正弦线、余弦线、正切线。
高中数学必修4知识点总结第一章三角函数正角:按逆时针方向旋转形成的角1、任意角 负角:按顺时针方向旋转形成的角零角:不作任何旋转形成的角2、象限角:角 的顶点与原点重合,角的始边与 x 轴的非负半轴重合,终边落 在第几象限,则称4、已知 是第几象限角,确定一n *所在象限的方法:先把各象限均分n 等n 份,再从x 轴的正半轴的上方起,依次将各区域标上一、二、 三、四,则 原 来是第几象限对应的标号即为 一终边所落在的区域.n为第几象限角. 第一象限角的集合为第二象限角的集合为 第三象限角的集合为第四象限角的集合为 360°90° k 360° 180°, k180°k 360° 270°,k 270° k 360° 360°, k终边在x 轴上的角的集合为 终边在y 轴上的角的集合为 终边在坐标轴上的角的集合为 k 180°,k k 180° 90°,k k 90°, k3、终边相等的角:与角终边相同的角的集合为k 360°,k360°360°360° k 360° 90°,k例4 .设角属于第二象限,且COS—2A .第一象限B .第二象限C.第三象限 D .第四象限解.C 2k 2k,(k Z),k -- k 2/k Z),2n,(n Z)时,一在第一象限;当k 2n 2 1,(n Z)时,一在第三象限;2cos —2 cos2 cos2 0,i在5、1弧度:长度等于半径长的弧所对的圆心角叫做1弧度.平方关系: 2 1 sin cos 2 1, si n 2 1 c 2 2os ,cos 1 2 sin ; 商数关系: 小sin 2 tan , sin tan cos ,cossincostan 13、三角函数的诱导公式:口诀: 奇变偶不变,付号看象限.1 sin 2k sin ,cos 2k cos , tan 2ktan k2 sin sin ,cos cos , tanta n • 3 sin sin , cos cos , tan tan•4 sin sin , coscos , tan ta n• 5 sin - cos ,cos — sin •2 26半径为r 的圆的圆心角 所对弧的长为I ,则角 的弧度数的绝对值是 7、弧度制与角度制的换算公式:2 360° , 1 180,1o 型 57.3。
三角函数一、随意角、弧度制及随意角的三角函数1.随意角(1)角的观点的推行①按旋转方向不一样分为正角、负角、零角.正角 : 按逆时针方向旋转形成的角随意角 负角: 按顺时针方向旋转形成的角零角 : 不作任何旋转形成的角②按终边地点不一样分为象限角和轴线角.角 的极点与原点重合,角的始边与 x 轴的非负半轴重合,终边落在第几象限,则称 为第几象限角.第一象限角的会合为 k 360ok 360o 90o , k第二象限角的会合为 k 360o 90o k 360o 180o , k第三象限角的会合为 k 360o 180o k 360o 270o , k第四象限角的会合为k 360o 270ok 360o360o , k终边在 x 轴上的角的会合为 k 180o , k终边在 y 轴上的角的会合为 k 180o 90o , k终边在座标轴上的角的会合为k 90o ,k(2)终边与角 α同样的角可写成 α+ k ·360 °(k ∈ Z).终边与角 同样的角的会合为k 360o, k(3)弧度制① 1 弧度的角:把长度等于半径长的弧所对的圆心角叫做1 弧度的角.②弧度与角度的换算: 360°= 2π弧度; 180°= π弧度.③ 半径为 r 的圆的圆心角所对弧的长为 l ,则角的弧度数的绝对值是lr④ 若扇形的圆心角为 为弧度制 ,半径为 r ,弧长为 l ,周长为 C ,面积为 S ,则 lr,C2r l ,S1 lr 1 r2 . 222 .随意角的三角函数定义设 α是一个随意角,角 α的终边上随意一点P(x , y),它与原点的距离为 r rx 2 y 2 ,那么角 α的正弦、余弦、rrx(三角函数值在各象限的符号规律归纳为:一全正、二正弦、三正切分别是: sin α= y , cos α= x , tan α= y.正切、四余弦)3.特别角的三角函数值角度030456090120135150180270360函数角 a 的弧度0π /6π/4π /3π /22π /33π /45π/6π3π /22πsina01/2√ 2/2√ 3/21√ 3/2√ 2/21/20-10 cosa1√ 3/2√ 2/21/20-1/2-√ 2/2-√ 3/2-101 tana0√ 3/31√ 3-√ 3-1-√ 3/300二、同角三角函数的基本关系与引诱公式A.基础梳理1.同角三角函数的基本关系(1)平方关系: sin2α+ cos2α= 1;(在利用同角三角函数的平方关系时,若开方,要特别注意判断符号)sin α(2)商数关系:=tanα.(3)倒数关系:tan cot 1cos α2.引诱公式公式一: sin( α+ 2kπ)=sin α, cos(α+ 2kπ)=cos_α,tan(2k )tan此中 k∈Z .公式二: sin( π+α)=- sin_α, cos( π+α)=- cos_α, tan( π+α)= tan α.公式三: sin( π-α)= sin α, cos( π-α)=- cos_α,tan tan.公式四: sin( -α)=- sin_α, cos(-α)= cos_α,tan tan .ππ公式五: sin -α= cos_α, cos-α= sin α.22ππ公式六: sin 2+α= cos_α, cos2+α=- sin_α.π口诀:奇变偶不变,符号看象限.此中的奇、偶是指π引诱公式可归纳为 k· ±α的各三角函数值的化简公式.的奇数22倍和偶数倍,变与不变是指函数名称的变化.假如奇数倍,则函数名称要变( 正弦变余弦,余弦变正弦 ) ;假如偶数倍,则函数名称不变,符号看象限是指:把πα当作锐角时,依据 k· ±α在哪个象限判断原三角函数值的符号,最后作为结....2...果符号.B. 方法与重点一个口诀1、引诱公式的记忆口诀为:奇变偶不变,符号看象限.2、四种方法在求值与化简时,常用方法有:sin α(1)弦切互化法:主要利用公式tan α=化成正、余弦.cos α(2)和积变换法:利用 (sin θ±cos θ)2=1 ±2sin θcos θ的关系进行变形、转变.( sin cos、sin cos、sin cos三个式子知一可求二)(3)巧用 “1”的变换: 1= sin 2θ+ cos 2θ= sinπ=tan 42(4)齐次式化切法:已知 tank ,则 a sinbcos a tan b ak bm sinn cos m tan n mk n三、三角函数的图像与性质学习目标:1 会求三角函数的定义域、值域2 会求三角函数的周期 :定义法,公式法,图像法(如y sin x 与 y cosx 的周期是)。
§04。
三角函数 知识要点1. ①与α(0°≤α<360°)终边相同的角的集合(角α与角β的终边重合):{}Z k k ∈+⨯=,360|αββ②终边在x 轴上的角的集合: {}Z k k ∈⨯=,180|ββ ③终边在y 轴上的角的集合:{}Z k k ∈+⨯=,90180|ββ ④终边在坐标轴上的角的集合:{}Z k k ∈⨯=,90| ββ ⑤终边在y =x 轴上的角的集合:{}Z k k ∈+⨯=,45180| ββ⑥终边在x y -=轴上的角的集合:{}Z k k ∈-⨯=,45180| ββ⑦若角α与角β的终边关于x 轴对称,则角α与角β的关系:βα-=k 360 ⑧若角α与角β的终边关于y 轴对称,则角α与角β的关系:βα-+= 180360k ⑨若角α与角β的终边在一条直线上,则角α与角β的关系:βα+=k 180⑩角α与角β的终边互相垂直,则角α与角β的关系: 90360±+=βαk2. 角度与弧度的互换关系:360°=2π 180°=π 1°=0。
01745 1=57。
30°=57°18′ 注意:正角的弧度数为正数,负角的弧度数为负数,零角的弧度数为零.、弧度与角度互换公式: 1rad =π180°≈57。
30°=57°18ˊ. 1°=180π≈0。
01745(rad )3、弧长公式:rl ⋅=||α。
扇形面积公式:211||22s lr r α==⋅扇形4、三角函数:设α是一个任意角,在α的终边上任取(异于原点的)一点P (x,y)P与原点的距离为r,则 ry =αsin ; rx =αcos ; =αtan yx=αcot ; xr =αsec ;。
yr=αcsc 。
5、三角函数在各象限的符号:(一全二正弦,三切四余弦)正切、余切余弦、正割正弦、余割6、三角函数线正弦线:MP ; 余弦线:OM; 正切线: AT.SIN \COS 三角函数值大小关系图1、2、3、4表示第一、二、三、四象限一半所在区域16. 几个重要结论:8、同角三角函数的基本关系式:αααtan cos sin = αααcot sin cos = 1cot tan =⋅αα 1sin csc =α⋅α 1cos sec =α⋅α1cos sin 22=+αα 1tan sec 22=-αα 1cot csc 22=-αα9、诱导公式:2k παα±把的三角函数化为的三角函数,概括为: “奇变偶不变,符号看象限"公式组二 公式组三(完整版)高中必修四三角函数知识点总结x x k x x k x x k x x k cot )2cot(tan )2tan(cos )2cos(sin )2sin(=+=+=+=+ππππ x x x x xx x x cot )cot(tan )tan(cos )cos(sin )sin(-=--=-=--=- 公式组四 公式组五 公式组六xx x x x x xx cot )cot(tan )tan(cos )cos(sin )sin(=+=+-=+-=+ππππ xx x x x x xx cot )2cot(tan )2tan(cos )2cos(sin )2sin(-=--=-=--=-ππππ xx x x xx xx cot )cot(tan )tan(cos )cos(sin )sin(-=--=--=-=-ππππ(二)角与角之间的互换公式组一 公式组二 βαβαβαsin sin cos cos )cos(-=+ αααcos sin 22sin =βαβαβαsin sin cos cos )cos(+=- ααααα2222sin 211cos 2sin cos 2cos -=-=-= βαβαβαsin cos cos sin )sin(+=+ ααα2tan 1tan 22tan -=βαβαβαsin cos cos sin )sin(-=- 2cos 12sinαα-±= βαβαβαtan tan 1tan tan )tan(-+=+ 2cos 12cos αα+±=βαβαβαtan tan 1tan tan )tan(+-=- 公式组三 公式组四 公式组五2tan 12tan2sin 2ααα+= 2tan 12tan 1cos 22ααα+-= 2tan 12tan2tan 2ααα-=42675cos 15sin -== ,42615cos 75sin +== ,3275cot 15tan -== ,3215cot 75tan +== 。
必修四三角函数知识点经典总结高一必修四:三角函数一任意角的概念与弧度制(一)角的概念的推广 1、角概念的推广:在平面,一条射线绕它的端点旋转有两个相反的方向,旋转多少度角算是多少度角。
按别同方向旋转的角可分为正角和负角,其中逆时针方向旋转的角叫做正角,顺时针方向的叫做负角;当射线没有旋转时,我们把它叫做零角。
适应上将平面直角坐标系x 轴正半轴作为角的起始边,叫做角的始边。
射线旋转停止时对应的边叫角的终边。
2、特别命名的角的定义:(1)正角,负角,零角:见上文。
(2)象限角:角的终边降在象限的角,依照角终边所在的象限把象限角分为:第一象限角、第二象限角等(3)轴线角:角的终边降在坐标轴上的角终边在x 轴上的角的集合: {}Z k k ∈?=,180| ββ 终边在y 轴上的角的集合: {}Z k k ∈+?=,90180| ββ 终边在坐标轴上的角的集合:{}Z k k ∈?=,90| ββ (4)终边相同的角:与α终边相同的角2x k απ=+ (5)与α终边反向的角:(21)x k απ=++终边在y =x 轴上的角的集合:{}Z k k ∈+?=,45180| ββ 终边在x y -=轴上的角的集合:{}Z k k ∈-?=,45180| ββ(6)若角α与角β的终边在一条直线上,则角α与角β的关系:βα+=k 180 (7)成特别关系的两角若角α与角β的终边对于x 轴对称,则角α与角β的关系:βα-=k 360 若角α与角β的终边对于y 轴对称,则角α与角β的关系:βα-+= 180360k 若角α与角β的终边互相垂直,则角α与角β的关系:90360±+=βαk 注:(1)角的集合表示形式别唯一.(2)终边相同的角别一定相等,相等的角终边一定相同. 3、本节要紧题型: 1.表示终边位于指定区间的角.例1:写出在720-?到720?之间与1050-?的终边相同的角. 例2:若α是第二象限的角,则2,2αα是第几象限的角?写出它们的普通表达形式.例3:①写出终边在y 轴上的集合.②写出终边和函数y x =-的图像重合,试写出角α 的集合. ③α在第二象限角,试确定2,,23ααα所在的象限.④θ角终边与168?角终边相同,求在[0,360)??与3θ终边相同的角.(二)弧度制1、弧度制的定义:l Rα=2、角度与弧度的换算公式:360°=2π 180°=π 1°=0.01745 1=57.30°=57°18′注意:正角的弧度数为正数,负角的弧度数为负数,零角的弧度数为零.一具式子中别能角度,弧度混用. 3、题型(1)角度与弧度的互化例:74315,330,,63ππ?? (2)L R α=,211,22l r s lr r αα===的应用咨询题例1:已知扇形周长10cm ,面积24cm ,求中心角.例2:已知扇形弧度数为72?,半径等于20cm ,求扇形的面积.例3:已知扇形周长40cm ,半径和圆心角取多大时,面积最大. 例4:12123 7570,750,,53ααβπβπ=-?=?==- a.求出12,αα弧度,象限.b.12,ββ用角度表示出,并在720~0-??之间找出,他们有相同终边的所有角. 二任意角三角函数(一)三角函数的定义 1、任意角的三角函数定义正弦r y =αsin ,余弦r x=αcos ,正切xy =αtan 2(二)单位圆与三角函数线1、单位圆的三角函数线定义如图(1)PM表示α角的正弦值,叫做正弦线。
《三角函数》第一讲:诱导公式及同角的三角函数关系知识要点:一、三角函数的定义:()22,,P x y r OP x y α==+设点是角终边上异于原点的任一点,则()sin ;cos tan 0.y x yx r r xααα===≠; sin cos tan ααα“一、二象限为正,三、四象限为负”“一、四象限为正,二、三象限为负”“一、三象限为正,二、四象限为负”二、诱导公式:十字决:“奇变偶不变,符号看象限”说明:⑴将“α”始终视为锐角;⑵“奇,偶”指的是除α外的角是902π⎛⎫⎪⎝⎭或的奇数倍或偶数倍; ⑶“变,不变”指的是函数名的变或不变;⑷ “符号”指的是原函数的正负号,看象限指的是“() ”内整体角所在的象限。
三、同角的三角函数关系:平方关系:22sin cos 1αα+=;商数关系:sin tan ,cos 2k k Z απααπα⎛⎫=≠+∈ ⎪⎝⎭倒数关系:1tan ,cot 2k k Z πααα⎛⎫=≠∈ ⎪⎝⎭变形应用: ()2sin cos 12sin cos x x x x ±=±、()()22sin cos sin cos 2.x x x x ++-=典型例题:题型一:(诱导公式)【例1】tan 300sin 450+=【例2】已知sin (-α)=,则)2cos(απ+= .【例3】已知sin()4πα+=3sin()4πα-值为( )A.21 B. 12- C. 23 D. 题型二:(同角的三角函数关系)【例4】已知()3sin 5πα+=,且α是第四象限的角,则()cos 2απ-= . 【例5】已知:1cos tan 0,sin _______.5ααα=<=且则 【例6】已知tan100,sin80k =则的值等于_______. 【例7】已知:1tan 3α=-,求下列各式的值. ()()()24sin 2cos 11;2sin 3sin cos 1;3.5cos 3sin 1sin cos ααααααααα--++-【例8】已知()()sin cos ,32ππαπαθπ⎫--+=<<⎪⎝⎭求值:(1)sin cos αα-; (2)()()33sin2cos 2παπα-+-强化训练:1. 化简:)23sin()2sin(++-ππ= 。
高中数学必修四第一章:三角函数1.1任意角和弧度制考点1:任意角的概念考点2:终边相同的角考点3:象限角与轴线角1.1.2弧度制考点1:弧度制考点2:弧度制与角度制考点3:用弧度表示有关角考点4:扇形的弧长与面积1.2任意角的三角函数1.2.1任意角的三角函数考点1:任意角的三角函数的定义考点2:三角函数值的符号考点3:诱导公式(一)考点4:三角函数式的化简与证明考点5:三角函数线考点6:三角函数的定义域与值域1.2.2同角三角函数的基本关系考点1:同角三角函数的基本关系考点2:三角函数式的化简考点3:利用sinα,cosα,sinαcos α之间的关系求值考点4:三角函数恒等式的证明1.3三角函数的诱导公式考点1:诱导公式考点2:运用诱导公式化简、求值考点3:诱导公式的综合运用1.4三角函数的图像与性质1.4.1正弦函数、余弦函数的图像1.4.2正弦函数。
余弦函数的性质考点1:函数的周期性考点2:正弦函数与余弦函数的图像考点3:正弦函数与余弦函数的定义域和值域考点4:正弦函数与余弦函数的奇偶性考点5:正弦函数与余弦函数的单调性考点6:正弦函数与余弦函数的对称性1.4.3正切函数的性质与图像考点1:正切函数的图像考点2:正切函数的性质考点3:正切函数的综合问题1.5函数y=Asin(ωx+φ)的综合应用考点1:用“五点法”作函数y=Asin(ωx+φ)的图像考点2:用变换作图法作函数y=Asin(ωx+φ)的图像考点3:由函数y=Asin(ωx+φ)的部分图像确定其解析式考点4:简谐运动的有关概念考点5:函数y=Asin(ωx+φ)的综合应用1.6三角函数模型的简单应用考点1:利用三角函数定义建立三角函数模型考点2:用拟合法建立三角函数模型考点3:三角函数模型应用的综合问题考法整合:考法1:任意角三角函数定义的灵活运用考法2:山脚函数图像的对称性考法3:三角函数的值域与最值问题考法4:利用图像解题第二章:平面向量2.1平面向量的事件背景及基本概念考点1:平面向量的概念考点2:平行向量(共线向量)、相等向量与相反向量考点3:平面向量的应用2.2平面向量的线性运算2.2.1向量加法运算及其几何意义2.2.2向量减法运算及其集合意义考点1:向量的加法考点2:向量的减法考点3:向量的化简考点4:响亮的加减法应用2.2.3向量数乘运算及其集合意义考点1:向量的数乘运算考点2:向量的线性运算考点3:向量的共线问题考点4:利用向量解决平面几个问题2.3平面向量的基本定理及坐标表示2.3.1平面向量的基本定理考点1:平面向量的基本定理考点2:平面向量基本定理的应用考点3:两个平面向量的夹角2.3.2平面向量的正交分解及坐标表示2.3.3平面向量的坐标运算2.3.4平面向量共线的坐标表示考点1:平面向量的坐标表示考点2:平面向量的坐标运算考点3:平面向量贡献的坐标表示考点4:线段的定比分点考点5:平面向量坐标表示的应用2.4平面向量的数量积2.4.1平面向量数量积的物理背景及其含义考点1:平面向量的数量积考点2:数量积的性质及其运算律考点3:两向量的夹角考点4:数量积的应用2.4.2平面向量数量积的坐标表示。