第27卷 第2期计 算 机 仿 真2010年2月 文章编号:1006-9348(2010)02-0320-05
基于R F I D技术的室内定位算法研究
闫保中,姜 琛,尹伟伟
(哈尔滨工程大学自动化学院,黑龙江哈尔滨150001)
摘要:为了提高室内定位系统的性能,使用主动式射频识别技术设计了一种应用于室内环境的低成本定位仿真算法。算法
引入参考标签辅助定位,利用布局方式造成接收信号强度的不同对待定位的电子标签进行方向与距离上的估测。详细介绍
系统的布局方式,仿真了不同布局方式对系统定位精度的影响。根据仿真分析,最终选取了一种适合于化工企业生产车间
的人员定位方案,该方案提高了定位精度、降低了系统的成本,具有一定的实用意义。
关键词:射频识别;室内定位;参考标签;接收信号强度
中图分类号:T N911.23 文献标识码:A
R e s e a r c ho n t h e I n d o o r P o s i t i o n i n g A l g o r i t h m B a s e d o nR F I D
Y A NB a o-z h o n g,J I A N GC h e n,Y I NWe i-w e i
(C o l l e g e o f A u t o m a t i o n,H a r b i n E n g i n e e r i n g U n i v e r s i t y,H a r b i nH e i l o n g j i a n g150001,C h i n a)
A B S T R A C T:I no r d e r t o i m p r o v et h e p e r f o r m a n c e o f t h e i n d o o r p o s i t i o n i n g s y s t e m,a l o wc o s t i n d o o r p o s i t i o n i n g a l-
g o r i t h m i s p r o p o s e db y u s i n g t h e a c t i v e r a d i o f r e q u e n c y i d e n t i f i c a t i o nt e c h n o l o g y.T h i s s c h e m e i n t r o d u c e d t h er e f e r-
e n c et a g s a s s i s t e dp o s i t i o n i n g,a n d e s t i m a t e d t h e d i r e c t i o na n d d i s t a n c e o
f t h e u n c e r t a i n p o s i t i o n t a
g s b y u s i n g t
h e d
i f-
f e r e n t r e c e i v e ds i
g n a l s t r e n g t
h t h a t c a u s e db yt h e v a r
i o u s l a y o u t s c h e m e.T h e l a y o u t s c h e m e i s d e s c r i b e di nd e t a i l.
T h e e f f e c t o n t h e p o s i t i o n i n g a c c u r a c y o f t h e s y s t e mt h a t c a u s e d b y t h e v a r i o u s l a y o u t s c h e m e w a s s i m u l a t e d.O n t h e
b a s i s o f s i m u l a t i o na n a l y s i s,t h e s
c h e m e i s s e l e c t e
d w h i c h i s s u i t a b l
e
f o r p e r s o n n e l p o s i t i o ni n t h e c h e m i c a l i n d u s t r i a l
e n t e r p r i s e s a t l a s t.T h e s c h e m e w h i c h i m p r o v e s t h e p o s i t i o n i n g p r e c i s i o na n d d e c r e a s e s t h e s y s t e mc o s t s h a s p r a c t i c a l
m e a n i n g s.
K E Y WO R D S:R a d i o f r e q u e n c y i d e n t i f i c a t i o n;I n d o o r p o s i t i o n i n g;R e f e r e n c e t a g;R e c e i v e d s i g n a l s t r e n g t h
1 引言
室内目标定位存在重要的潜在应用,近年来引起了大量的研究及关注。本设计基于某化工企业生产车间的人员定位系统,该系统在日常生产活动中,可以提供考勤管理、指挥生产;当事故发生时(如火灾、保障),可以为灾难抢险提供保障。目前在室内环境下研究最广泛的是具备信息携载功能、传输可靠的射频识别(R a d i oF r e q u e n c y I d e n t i f i c a t i o n,R F I D)技术。R F I D定位系统利用标签对物体的唯一标识特性,依据读卡器接收到的电子标签发送的信号来获得电子标签的位置信息[1]。
现有的室内定位系统定位误差一般为1~1.2m[2],其中研究最为广泛的优势比较突出的L A N D M A R C(L o c a t i o ni-d e n t i f i c a t i o nb a s e do nd y n a m i c a c t i v e R F I Dc a l i b r a t i o n)系统的定位误差为1m。L A N D M A R C系统可扩展性好,能处理比较复杂的环境;但L A N D M A R C系统存在不必要的耗时、硬件浪费及定位精度受系统标签的密度分布和布局形状影响等缺点[3]。改进L A N D M A R C系统的适用范围又受到了限制[4]。
基于现有的定位算法存在的不足,本文提出一种基于接收信号强度(R e c e i v e dS i g n a l S t r e n g t h,R S S)的室内定位算法,该算法创新性地利用多频读卡器以及具有转发读卡器指令的参考标签来进行定位。相对L A N D M A R C算法,该算法只需要较少的读写器和参考标签就能获得较高的定位精度,降低了成本和现场布局的难度,并且通过细胞组合式扩充的方法扩大定位区域,弥补了改进L A N D M A R C系统的不足。
2 基本定位方法
目前,有以下几种常用的定位方法:基于信号到达角的定位方法(A n g l e o f A r r i v a l,A O A)、基于接收信号强度(R S S)和信号到达时间(T i m e o f A r r i v a l,T O A)等等[5]。由于室内环
收稿日期:2008-09-27 修回日期:2008-12-10
境非视距传输(N o n -L i n e -o f -S i g h t ,N L O S )及多径传输效应的存在,多径信号到达接收端时具有不同的时延和入射角,T O A 和A O A 在室内存在不可预测的误差,且高精度时钟和传感器阵列费用昂贵。相比之下,R S S 检测设备和机制简单,可通过多次测量平均获得较准确信号强度值,降低多径和遮蔽效应影响,是室内定位研究的焦点[6]。因此本设计选择基于接收信号强度的定位算法。
3 系统模型的建立
3.1 定位系统的布局
系统引入充当参考点使用的参考标签进行辅助定位,这些参考标签具有转发读卡器信号功能的,根据系统布局情况和读卡器接收信号强度对待定位的电子标签进行位置估测。主要组成部件如下定义:
○读卡器(R e a d e r ):选用多频读卡器,即读卡器可发送不同强度的射频信号;设信号最大强度为F u l l P o w e r ,最远传输距离为N 米,可指定参考标签的I D ,命令其进行转发的动作。
○参考标签(S R e f T a g ):位置固定,功率为S R e f T a g P W;最远传输距离M 米;具有转发读卡器传送指令的功能。○待定位标签(T a g ):功率固定为T a g P W;最远传输距离为N 米。
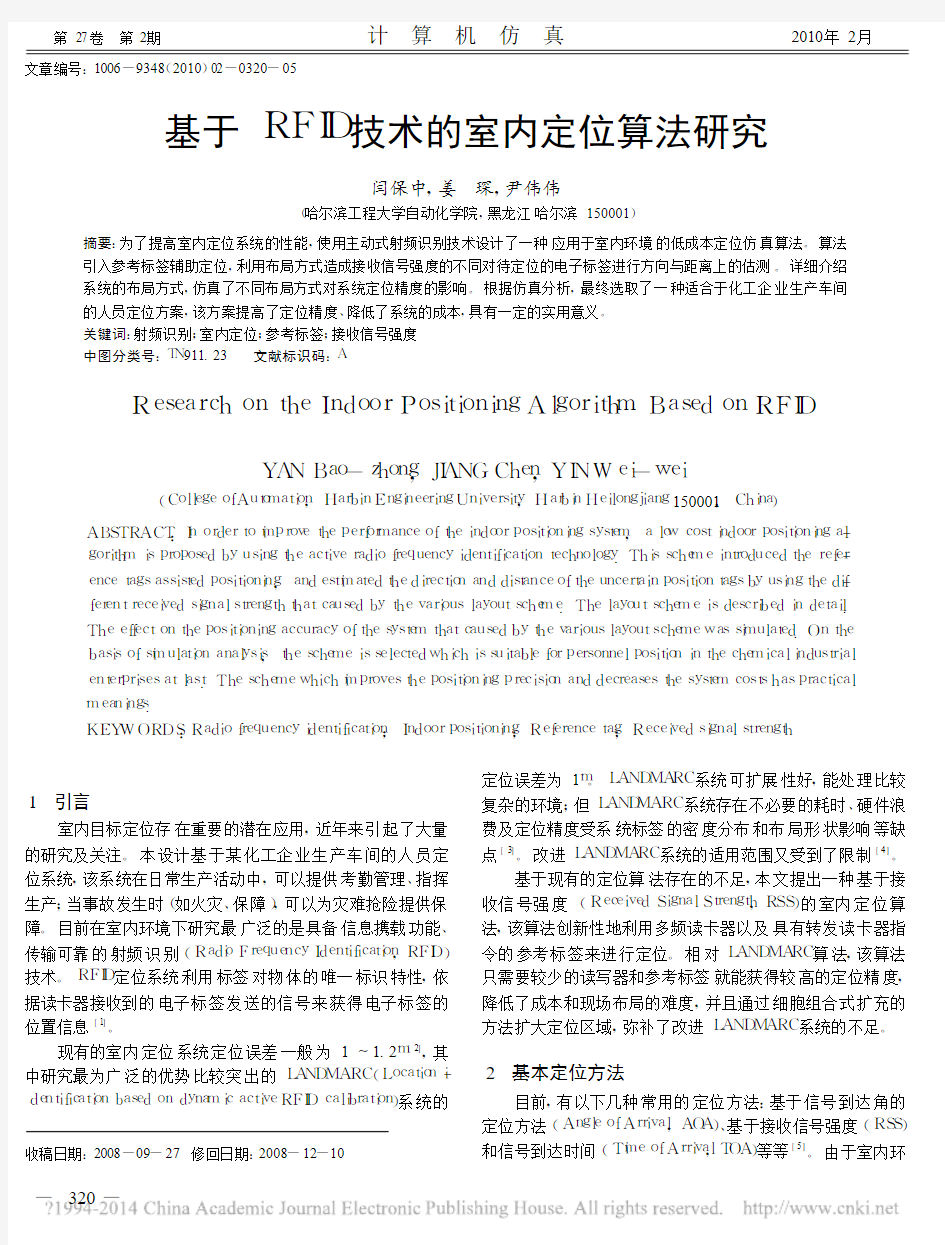
系统布局如图1,参考标签数目分别为三个、四个和六个
。
图1 系统布局
读卡器放置于平面中央处,定义其坐标为(R e a d e r x ,R e a d e r y );读卡器和参考标签坐标已知;多个参考标签均匀分布在距离读卡器N 米处,其坐标为(S R e f T a g X x ,S R e f T a g X y ),参考标签数目X 可以为三个、四个或六个。假设n 个待定位标签均位于以N 为半径的圆形区域内。3.2 定位系统的资讯收集
资讯收集流程如下:
1)读卡器以最大功率对参考标签和待定位标签发送射频信号,记录被识别的待定位标签;
2)参考标签依次转发读卡器指令,记录每个参考标签转发的信号被哪些待定位标签接收到;
3)改变读卡器的信号传输功率,记录哪些待定位标签被识别;
4)重复动作3)。
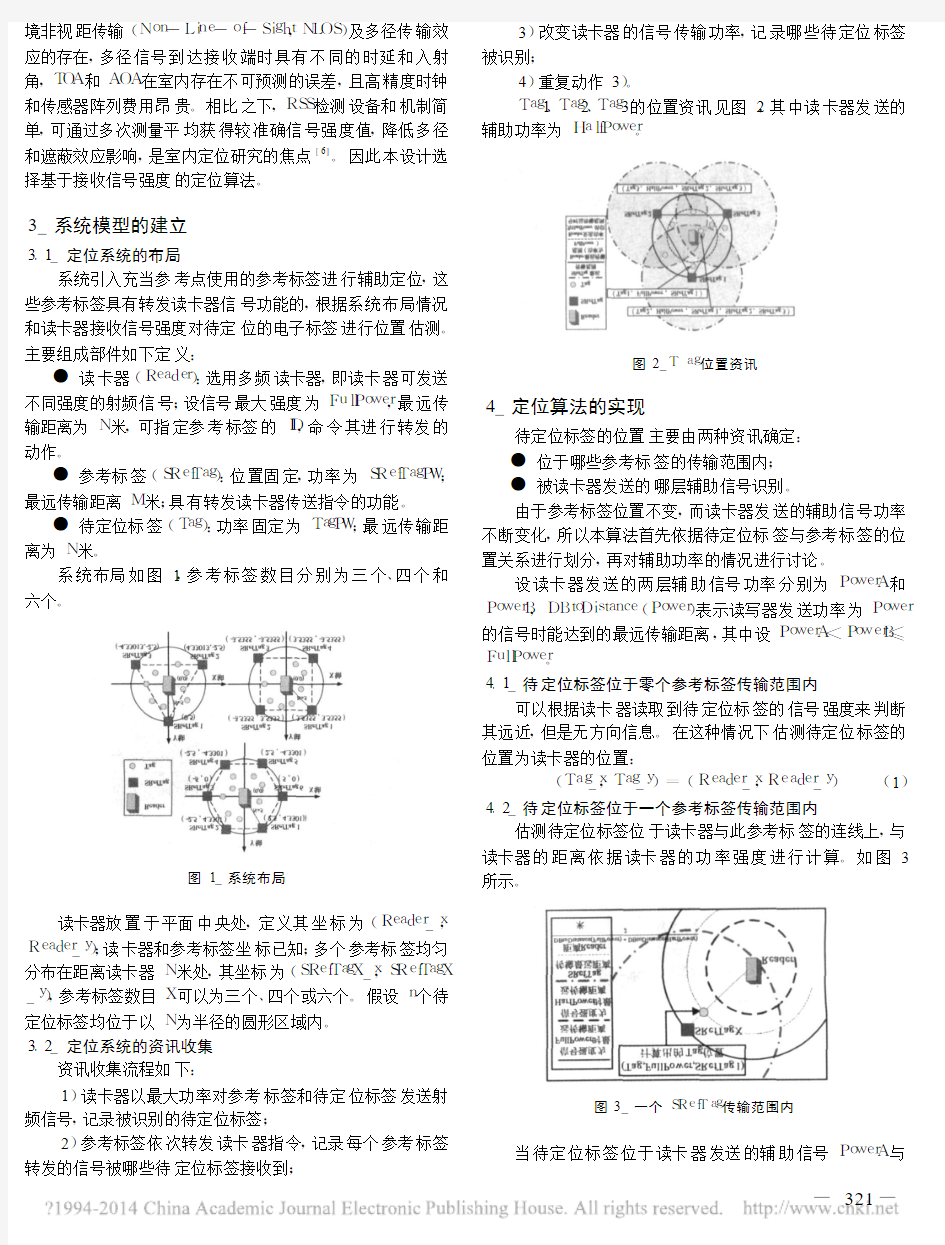
T a g 1、T a g 2、T a g 3的位置资讯见图2,其中读卡器发送的辅助功率为H a l f P o w e r
。
图2 T a g 位置资讯
4 定位算法的实现
待定位标签的位置主要由两种资讯确定:○位于哪些参考标签的传输范围内;
○被读卡器发送的哪层辅助信号识别。
由于参考标签位置不变,而读卡器发送的辅助信号功率不断变化,所以本算法首先依据待定位标签与参考标签的位置关系进行划分,再对辅助功率的情况进行讨论。
设读卡器发送的两层辅助信号功率分别为P o w e r A 和P o w e r B ,D B t o D i s t a n c e (P o w e r )表示读写器发送功率为P o w e r 的信号时能达到的最远传输距离,其中设P o w e r A
可以根据读卡器读取到待定位标签的信号强度来判断其远近,但是无方向信息。在这种情况下估测待定位标签的位置为读卡器的位置:
(T a g x ,T a g y )=(R e a d e r x ,R e a d e r y )
(1)
4.2 待定位标签位于一个参考标签传输范围内
估测待定位标签位于读卡器与此参考标签的连线上,与
读卡器的距离依据读卡器的功率强度进行计算。如图3所示
。
图3 一个S R e f T a g 传输范围内
当待定位标签位于读卡器发送的辅助信号P o w e r A 与
P o w e r B 传输范围之间时,待定位标签位置系数为:
w=
[D B t o D i s t a n c e (P o w e r A )+D B t o D i s t a n c e (P o w e r B )]/2
S R e f T a g 与R e a d e r 的距离
(2)当待定位标签仅位于辅助信号P o w e r A 的传输范围内
时,待定位标签位置系数为:
w =
D B t o D i s t a n c e (P o w e r A )/2S R e f T a g 与R e a d e r 的距离
(3)
待定位标签的位置方程:
T a g x =R e a d e r x +w (S R e f T a g X
x -R e a d e r x )T a g y =R e a d e r y +w (S R e f T a g X y -R e a d e r y )(4)
4.3 待定位标签位于两个参考标签传输范围内
估测待定位标签位于过读卡器与两个参考标签连线垂
直的直线上,且与读卡器的距离为d i s 。如图4所示。
图4 两个S R e f T a g 传输范围内
当待定位标签位于辅助信号P o w e r A 与P o w e r B 传输范围之间时,与读卡器的距离为:
d i s =[D B t o D i s t a n c
e (P o w e r A )+D B t o D i s t a n c e (P o w e r B )]/2
(5)当待定位标签仅位于辅助信号P o w e r A 传输范围内时,
与读卡器的距离为:
d i s=D B t o D i s t a n c
e (P o w e r A )/2
(6)
待定位标签的位置方程:
当(S R e f T a g 1 y =S R e f T a g 2 y )时:
x=
S R e f T a g 1 x +S R e f T a g 2 x 2
(d i s )2
=(x -R e a d e r x )2
+(y-R e a d e r y )
2
(7)
当(S R e f T a g 1 y ≠S R e f T a g 2 y )时:y -(S R e
f T a
g 1 y +S R e f T a g 2 y 2
)=
-S R e f T a g 1 x -S R e f T a g 2 x S R e f T a g 1 y -S R e f T a g 2 y (x -S R e f T a g 1 x +S R e f T a g 2 x 2
)
(d i s )2=(x -R e a d e r x )2+(y -R e a d e r y )
2(8)
这样计算的出的待定位标签位置坐标有两个解,取与距
离参考标签较近的点作为真值。
4.4 待定位标签位于三个及以上参考标签传输范围内
估测待定位标签位于这些参考标签的中点与读卡器的连线上。如图5所示。
图5 三个S R e f T a g 传输范围内
先求出这些参考标签所形成的中点,定义该点为S R e f T -a g S ,N u m (S R e f T a g )表示参考标签的个数,该点坐标为:
S R e f T a g S x =
S R e f T a g 1 x +S R e f T a g 2 x +L
N u m (S R e f T a g )
S R e f T a g S y =
S R e f T a g 1 y +S R e f T a g 2 y +L
N u m (S R e f T a g )(9)
当待定位标签位于辅助信号P o w e r A 与P o w e r B 传输范
围之间时,待定位标签位置系数为:
w=
[D B t o D i s t a n c e (P o w e r A )+D B t o D i s t a n c e (P o w e r B )]/2S R e f T a g S 与R e a d e r 的距离(10)
当待定位标签仅位于辅助信号P o w e r A 的传输范围内
时,待定位标签位置系数为:
w=
D B t o D i s t a n c e (P o w e r A )/2(11)
则参考标签的估测坐标为:T a g x =R e a d e r x +w (S R e f T a g S x -R e a d e r x )
T a g y =R e a d e r y +w (S R e f T a g S y -R e a d e r y )(12)综合以上三种情况,第i 个待定位标签的位置误差为:
e i =(
R e a l T a g i x -T a g i x )2+(R e a l T a g i y -T a g i y )2(13)其中,i ∈[1,n ],(R e a l T a g i x ,R e a l T a g i y )是第i 个待定位标签的真实位置,(T a g i x ,T a g i y )是第i 个待定位标签的计算位置,n 为待定位标签的数目。
则待定位标签的平均误差[6]为:
e =1∑
n
i
=1
e i
i ∈[1,n ](14)
5 系统仿真分析
实验中,在读卡器所能识别的圆形区域内任取400个采
样点,作为待定位标签的真实位置坐标。模型的布局方式见图2。仿真参数如下:参考标签与读卡器之间的距离为5m ;参考标签的最大传输功率为18.7753d B m (5m );当读卡器发送两层辅助功率时,第一层辅助功率为18.7753d B m (5m ),第二层辅助功率为11.5506(2.5m );当读卡器发送三层辅助功率时,第一层辅助功率为18.7753d B m (5m ),第二层辅助功率为14.5491d B m (3.3333m ),第三层辅助功率为7.3244d B m (1.6667m );距离与功率的转换关系如下:
D B t o D i s t a n c e (D )=2+10*2.4*l o g (D )(15)
其中D 表示距离,单位为m ;D B t o D i s t a n c e (D )表示距离D 与
传输功率的关系,单位为d B m 。下面根据系统的各种参数变化,对平均定位误差进行分析,找出精度更高的情况。
5.1 辅助功率对系统平均误差的影响5.1.1 当读卡器发送二层辅助功率时
第一层辅助信号固定不变,改变第二层辅助信号的功率使之在0d B m~18.7753d B m 之间变化。图6表示读卡器数目发生变化时,改变读卡器第二层辅助功率对平均误差产生的影响
。
图6 第二层辅助功率对误差的影响
观察图6可知:对与给定的参考标签数量,定位模型的平均误差随着第二层辅助信号功率的变化而变化,当辅助功
率位于10d B m 左右时平均误差均能达到最小。5.1.2 当读卡器发送三层辅助功率时
1)第一层和第二层辅助信号功率固定不变,图7(a )为改变第三层辅助信号的功率(在0d B m ~14.5491d B m 间变化)对系统平均误差的影响;2)第一层和第三层辅助信号功率固定不变,图7(b )为改变第二层辅助信号的功率(在7.3244d B m ~18.7753d B m 间变化)对系统平均误差的影响。
由图7可知,改变读卡器发送的辅助功率信号强度对平均误差产生一定的影响,图7(a )中当第二层辅助信号的功率在14d B m 左右平均误差最小,图7(b )中当第三层辅助信号的强度在8d B m 左右平均误差最小。比较图6(b )与图7,可以发现当读卡器的辅助功率层数由二层增至三层时,模型的平均误差有所减小,但仅仅增加辅助功率的层数,并不能显著的减小定位误差。辅助功率的层数过多,对位置计算和实时处理产生一定的困难
。
图7 辅助功率对误差的影响
5.2 参考标签数目对平均误差的影响
由图6可知,该模型的平均误差与使用的参考标签的数量成反比,当参考标签数目由三个增至四个时,平均误差显着降低,当参考标签数目由四个增至六个的时候,平均误差的变化缓慢。通过试验可知,仅仅增加参考标签的数目,系统的定位精度变化不大,而且参考标签的数目过多,使得计算难度加大,不利于实时定位处理。
5.3 参考标签传输距离对平均误差的影响
系统整体布局和读卡器发送的两层辅助信号功率不变,使用四个参考标签,参考标签的最大传输功率在10d B m~22d B m 之间变化时,参考标签的最大传输范围随之改变,对平均误差的影响如图8
。
图8 传输距离对误差的影响
由图8可知,当参考标签与读卡器距离为5m 时,读卡器的最大功率在18d B m 附近系统的平均误差达到最小值;当参考标签与读卡器距离为4m 时,读卡器的最大功率在16d B m 附近系统的平均误差达到最小值。参考标签的最大传输功率对定位系统的平均误差有着比较明显的影响,当参考标签与读卡器间距离小时,平均误差达到最小值需要的最大功率小。5.4 参考标签位置对平均误差影响
系统整体布局和读卡器发送的两层辅助信号功率不变,参考标签的数量为四个,改变参考标签距离读卡的位置对平均误差的影响见图9。
当参考标签相对读卡器的距离在1m~9m 之间变化时,定位系统的平均误差也发生变化。由图9知,并非参考标签
图9 S R e f T a g 位置对误差影响
距离读卡器越近越好,而是在两者距离为5m 左右,系统的平
均误差达到最小。
5.5 扩大算法的适用范围
在上述模型中,定位系统的覆盖面积较小,实际应用存在困难,为了提高定位系统的适用范围,比较理想的办法是在使用较少的资源保持较高的定位精度的前提下增大系统的覆盖面积。最直接的方式是提高读卡器和参考标签传输功率,并将读卡器与参考标签间的距离一起增大。
图10为读卡器发送的二层辅助信号功率不变时读卡器和参考标签传输范围对系统平均误差的影响。由图10可知,读卡器和参考标签传输距离越大,定位系统的平均误差越大
。
图10 覆盖范围对误差的影响
为了解决上述的问题,本设计采用细胞组合式扩充的方法,将前文所说的一个读卡器配数个参考标签的方式作为一
个“基本单元”,将“基本单元”的布局进行组合从而扩大范围,如图11所示
。
图11 细胞组合式扩充
这种细胞组合式扩充方法可以提高定位系统的定位范围,减少参考标签的使用数量,这种定位方式更适用于范围较大的情况。
6 结论
通过上面的仿真结果,可以发现:本论文提出的定位算法并非辅助功率越大、层数越多定位误差越小;并非参考标签越多、传输距离越远定位误差越小;当参考标签距离读卡器为5m 左右时定位误差最小;并且随着系统的覆盖范围增加,系统的精度下降。因此,基于本设计的工业应用背景,每
个基本单元选择一个双频读卡器(第一层功率为
18.7753d B m ,第二层功率为14.5491d B m ,第三层功率为7.3244d B m )、四个参考标签、读卡器和参考标签的传输距离均为5m 。上述基本单元的定位适用范围为7.0711*7.0711m 2,定位误差为0.7447m ,并且可以利用“细胞组合式扩充方法”扩大系统的适用范围。
与应用较为广泛的L A N D M A R C 系统和改进L A N D -M A R C 系统相比,本文提出的定位算法做出了如下改进:提高了系统的定位精度;扩大了算法的适用范围;减少了读卡器和参考标签的数量,降低了系统成本;减小了系统布局的难度。并且本文所提出的定位算法对系统硬件、软件配置要求低,抗干扰能力较强,因此适用于复杂、危险的工业场所。
表1 算法性能比较
L A N D M A R C 系统
[3]
改进
L A N D M A R C 系统
[4]
本文提出的
方案
定位范围6m *4m 6m *4m 7.0711m *7.0711m
平均误差1m 0.7886m 0.7447m 读卡器数量4个4个1个参考标签数量
8个
8个
4个
参考文献:
[1] J i n G u a n g -y a o ,L u X i a o -y i .A n I n d o o r -L o c a l i -z a t i o n M e c h a -n i s m U s i n g A c t i v e R F I DT a g [C ].P r o c e e d i n g s o f t h eI E E EI n t e r -n a t i o n a l C o n f e -r e n c e o n S e n s o r N e t w o r k s ,U b i q u i t o u s ,a n d T r u s t -w o r t h y C o m p u t i n g .S e o u l ,K o r e a ,2006.
[2] 赵军.基于射频信号强度的零配置室内定位系统[D ].浙江大
学,2007.
[3] 孙瑜.射频识别(R F I D )室内定位算法研究[D ].西南交通大
学,2002.
[4] 李兴鹤.基于R F I D 的室内人员跟踪及药品防伪与管理的研究
[D ].山东大学,2006.
[5] B a o X u ,Wa n g G a n g .R a n d o m S a m p l i n g A l g o -r i t h mi n R F I DI n -d o o r L o c a t i o n S y s t e m [C ].P r o c e e d i n g s o f t h eT h i r dI E E EI n t e r n a -t i o n a lW o r k s h o p o nE l e c t r o n i cD e s i g n ,T e s ta n d A p p l i c a t i o n s ,
Z h e n j i a n g ,J i a n g s uP r o v i n c e ,C h i n a ,2005.
[6] 徐凤燕,石鹏,王宗欣.基于参数拟合的距离———损耗模型室
内定位算法[J ].电路与系统学报,2007,12(1):1-5.[7] Y i m i n Z h a n g a n d M o e n e s s GA m i n .L o c a l i -z a t i o n a n d T r a c k i n g o f
P a s s i v e R F I DT a g s [C ].W i r e l e s s S e n s i n g a n d P r o c e s s i n g ,2006,9(1):1-11.
(下转第355页)
表1 分段路径的误差统计
路径未补偿误差补偿后误差均方差精度提高1、直线1、曲线2.直线2、曲线
2.3529°10.575°2.4658°9.4753°
0.8619°-1.8750°0.9573°-2.0280°
0.37561.30090.49481.2486
63.37%82.27%61.18%78.60%
从表中数据的对比可发现,直线段的航向误差振幅较曲线段小很多,且从均方差计算得到,其平稳性也更佳;此外,两组数据的统计结果相近,表明了磁罗盘的测量重复性较高。
综上分析,磁罗盘在实际环境下仿真实验中体现了较好的总体性能。补偿算法应用于直线路径航向角解算时误差范围仅2°左右,精度提高约60%;在曲线路径上的航向误差范围也可控制在5°以内,精度提高80%左右。当载体航向变化剧烈(即运动曲线曲率变化较大)时,解算得到的航向误差出现尖峰现象,但考虑到此时载体转弯时的颠簸,导致磁罗盘与G P S 天线安装支架的颤动,从而造成对测量结果的影响;此外,磁罗盘x 轴向和测姿仪基线方向之间存在的安装误差,所以这种短时间内的航向解算误差还是合理的。
6 结论
本文在讨论磁罗盘航向测量原理和误差特性的基础上提出了椭圆假设及相应的实时补偿算法。陆上仿真实测结果表明,该算法能够有效地补偿载体中的磁场干扰,在不同路径下测得的航向角误差较稳定,且测量重复性较高,为A U V 导航系统的设计提供了实验依据。从测量误差的分析中可看出,针对载体内部磁场环境固定、运动方式为小曲率变化的应用,算法都有较好的适用性。此外将算法从两维推广到三维后,磁罗盘的三轴磁传感器可解算出三轴姿态,即航向、俯仰、横滚。三轴姿态测量将是进一步工作的研究方向。
参考文献:
[1] EB o v i o ,DC e c c h i ,F B a r a l l i .A u t o n o m o u s u n d e r w a t e r v e h i c l e s f o r
s c i e n t i f i c a n dn a v a l o p e r a t i o n s [J ].A n n u a l R e v i e w si nC o n t r o l ,2006,30:117–130
[2] Y E P i n g ,Z H A IC h u a n r u n ,WU H a o w e n ,Z H A N G Y a n h u a ,
Z H A NX i n g q u n .AL o w-C o s t I n t e g r a t e d N a v i g a t i o nS y s t e mB a s e d o nI M U/M a g n e t i c C o m p a s s/V e l o c i t y L o g /A l t i m e t e r [C ].I n t e r n a -t i o n a l S y m p o s i u mo nG P S /G N S S ,2008.
[3] 杨新勇,黄圣国.磁罗盘的罗差分析与验证[J ].电子技术大
学学报,2004,33(5):547-550.
[4] 邱丹,黄圣国.组合导航系统中数字磁罗盘的罗差补偿研究
[J ].仪器仪表学报,2006,27(6):1369-1371.
[5] 刘诗斌.微型智能磁航向系统研究[D ].西北工业大学,
2001.70-79.
[6] A n d r e wW F i t z g i b b o n ,M a u r i z i oP i l u ,R o b e r t BF i s h e r .D i r e c t
L e a s t S q u a r e s F i t t i n g o f E l l i p s e s [J ].P a t t e r n A n a l y s i s a n d M a c h i n e I n t e l l i g e n c e .M a y .1999,21(5):476-480.
[7] 王永泉,王玫,战兴群,张炎华.基于解析法的G P S 姿态测量技
术[J ].上海交通大学学报,2005,39(11):1904-1908
.
[作者简介]
吴浩文(1984-),男(汉族),上海人,上海交通大
学航空航天学院,硕士研究生,主要研究方向为捷联惯导系统与组合导航技术。
杜 刚(1978-),男(汉族),江西人,上海交通大
学,讲师,主要研究方向为控制理论及应用,水下
组合导航系统。
叶 萍(1983-),女(汉族),山西人,上海交通大学,博士生,主要
研究方向为卫星导航技术、组合导航理论、水下组合导航系统。
战兴群(1970-),男(汉族),黑龙江哈尔滨市人,上海交通大学,教
授,博士生导师,主要研究方向为卫星导航技术与系统、微小型组合导航系统、新型控制理论及应用。
(上接第324页
)
[作者简介]
闫保中(1963-),男(汉族),黑龙江哈尔滨市
人,工学硕士,硕士研究生导师,研究员,主要研究方向:组合导航、信息处理、计算机控制。主要科研成果:参与和主持完成科研项目30余项,其中有10余项通过省部级鉴定;发表论文40余篇;
获得省部级
奖项:一等奖两次、三等奖一次、四等奖一次。
姜 琛(1983-),女(汉族),黑龙江哈尔滨市人,硕士研究生,主要
研究方向:工业系统控制、室内无线定位。
尹伟伟(1983-),女(汉族),河北省衡水室人,硕士研究生,主要研
究方向:工业系统控制。