学院
自动控制原理课程设计报告
题目:线性系统的性能分析与校正
院别机械学院专业自动化
学生姓名班级
学号设计时间2016.1.15-22指导教师评定成绩
二0一五年十二月
摘要
自动控制技术已广泛应用于制造业、农业、交通、航空及航天等众多产业部门,极大地提高了社会劳动生产率,改善了人们的劳动环境,丰富和提高了人民的生活水平。然而,在控制技术需求的推动下,控制理论本身也取得了显著的进步。控制系统的校正问题,是自动控制理论的重要分支,也是具有实际意义的一种改善系统性能的手段和方法。
本文针对线性系统进行时域及频域性能的分析,根据对系统的要求对线性系统进行校正,主要采用频域的校正方法,控制器采用串联超前校正装置或串联滞后装置进行系统的校正。本文根据具体被控对象传递函数采用滞后校正装置进行系统校正。对校正过程及校正步骤进行详细阐述。同时给出采用之后校正装置时的控制器选择方法。
关键词:线性系统;时域分析;频域分析;串联滞后校正
ABSTRACT
Automatic control technology has been widely used in manufacturing industry, agriculture, transportation, aviation anaerospace and other many other industries, greatly improve the social labor productivity, improve the working environment of people, enrich and improve the people's living standards. However, under the control of the demand of control technology, the control theory itself has made remarkable progress. The correction of control system is an important branch of automatic control theory, and it is also a means and method to improve the performance of the system.
This paper analysis of time domain and frequency domain performance for linear systems, in accordance with the requirements of the system of linear system is corrected, mainly using frequency domain correction method. The controller uses series leading correction device or tandem lagging device for system calibration. In this paper, according to the specific control object transfer function using advanced calibration device for system calibration. The correction process and the correction steps are described in detail. At the same time, the selection method of the controller is given.
KEYWORDS:Linear system; Time domain analysis;Frequency domain analysis; Series delay correction
目录
1.设计内容 ................................. 错误!未定义书签。
2.设计要求 (5)
3.校正前系统分析 (5)
3.1时域性能指标计算与MATLAB分析 (5)
3.2 根轨迹稳定性分析 (7)
3.3 频域指标的计算与MATLAB分析 (9)
4.校正方案的选择、比较与确定 (10)
5.校正装置设计 (10)
5.1 参数计算 (10)
5.2 校正装置的选择 (11)
6.校正后系统分析 (11)
6.1 时域性能指标计算与MATLAB分析 (11)
6.2 根轨迹稳定性分析 (12)
6.3 频域指标的计算与MATLAB分析 (13)
7.校正前后系统性能指标的比较与分析 (15)
7.1 动态指标 (15)
7.2 静态指标 (15)
7.3 小结 (16)
8.设计总结 (16)
9.参考文献 (17)
1.设计内容
设单位负反馈系统的开环传递函数模型为()()()
1s 3.01s s k
s ++=
G ,完成设计
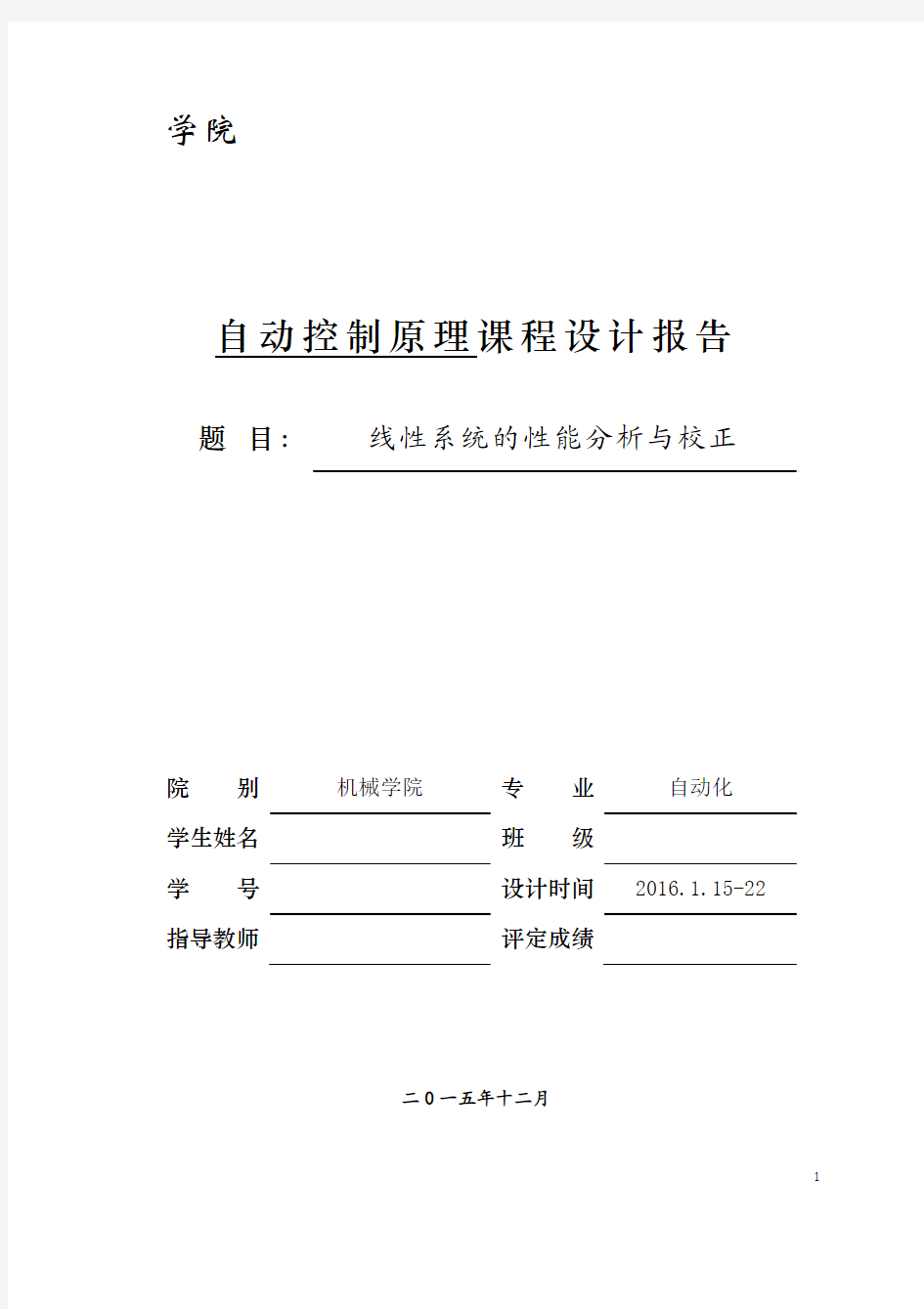
内容。要求校正后系统的性能指标为: 45γ>°,05.0 2.设计要求 已知单位反馈的系统开环传函为: ()()() 1s 3.01s s k s ++= G 校正后系统的性能指标为05.0e ,45ss ' <> o γ 3.校正前系统分析 3.1时域性能指标计算与MATLAB 分析 系统闭环传递函数为: ()()()k 1s 3.01s s k s +++= G 1.劳斯判据判定系统的绝对稳定性 系统闭环特征方程为D(s)=s(s+1)(0.3s+1)+K ,即 D(s)=0.3s^3+1.3s^2+s+K 根据劳斯判据得:对于三阶系统,系统稳定的充要条件为所有系数为正, 且a1*a2>a0*a3,因此该系统稳定,K 的范围:0 对于该系统的I 型系统, 静态误差系数分别为Kp=∞,Kv=K,Ka=0 单位阶跃输入时ess=1/(1+Kp)=0 单位斜坡输入时ess=1/Kv=1/K 单位加速度输入时ess=1/Ka=∞ 3.当K=4时,用MATLAB 绘制该系统的单位阶跃响应: 单位阶跃响应程序如下: clear; G1=tf([4],[conv([1,1],[0.3,1]),0]) G=feedback(G1,1,-1) step(G) G1 = 4 --------------------- 0.3 s^3 + 1.3 s^2 + s Continuous-time transfer function. G = 4 ------------------------- 0.3 s^3 + 1.3 s^2 + s + 4 Continuous-time transfer function. 图一单位阶跃响应曲线 分析:上图知,当K=4时,该系统稳定,ts=148s,tp=2s,超调量Mp=88.3%,tr=0.65s。但此时稳态误差ess=0.25,大于系统所要求的0.05,而05 =,该系统不稳 e .0 ss 定(其单位阶跃如下图),所以对系统进行校正。 当20 K时, = 单位阶跃响应程序如下所示: clear; G1=tf([20],[conv([1,1],[0.3,1]),0]) G=feedback(G1,1,-1) step(G) 单位阶跃响应曲线如图3-1所示: 单位阶跃响应曲线如图二所示: 图二 单位阶跃响应曲线 3.2 根轨迹稳定性分析 根轨迹:指系统开环传函的某一参量(一般为增益K )从0变化到∞时,闭 环系统特征方程根在s 平面上变化而形成的运动轨迹。 系统开环传函: ()()() 1s 3.01s s s ++= K G 1.根据开环传函用MATLAB 绘制根轨迹 根轨迹程序段如下所示: clear; G=tf(1,[conv([1,1],[0.3,1]),0]); rlocus(G); grid; 根轨迹图如图三所示: 图三 根轨迹 2.根据根轨迹规则绘制的根轨迹过程如下: 1 3.011 )(2 2++= )(ωωωωA ①求分离点 A B K G *= 根据A ’B=B ’A 0.9*s^2+2.6*s^+1=0 解得分离点s=-0.457 ②求渐近线 m n Zj P n i m j --= ∑∑==1 1 i σ 代入数值得渐近线与实轴交点σ=-1.44 m k -+=n )12(π?,k=0,1,2,…n-m-1 代入数值得渐近线与实轴正方向夹角?=π/3,π,5π/3. 用劳斯判据求解,劳斯表如下: S^3 0.31 S^2 1.3K S^1 (1.3-0.3k)/1.3 0 S^0 K 由以上数据绘制根轨迹 3.3 频域指标的计算与MATLAB分析 频域指标主要有截止频率ωc,穿越频率ωx,相位裕量γ,增益裕量h. 1.用MATLAB求解指标及bode图和奈氏图绘制: 校正前Bode图和奈氏曲线程序如下所示: clear; G=tf(20,[conv([1,1],[0.3,1]),0]); nyquist(G); figure(2);bode(G); margin(G); Grid 校正前Bode图如图四所示: 图四校正前Bode图 校正前奈氏图如图五所示: 图五 校正前奈氏图 校正前奈氏图包围(-1,j0),1=+ N ,,1- =N 0=N ,32=-=N P Z ,所以系统不稳定。 4.校正方案的选择、比较与确定 根据题目,校正后系统的性能指标为?>'45γ,05.0e 13.0)(1(s ++= s s s K G ,为单位负反馈。 当系统为单位斜坡信号输入时,K K e V 1 1ss == ,K=20 由图四bode 图知,原系统相位裕量Pm=-31.8小于零,系统不稳定,故采用串联滞 后校正较为合适. 取滞后装置补偿裕量△=15°, 根据滞后校正的原理有 γ()= γ’+△=45°+15°=60°, 从相位特性曲线中测得相位裕量60°对应的频率值为=0.425,此即为校正后 系统的截止频率. %求原系统在=0.425处的对数幅值L 5.校正装置设计 5.1 参数计算 'c ω' c ω' c ω clear; G1=tf([20],[conv([1,1],[0.3,1]),0]);%原系统的开环传递函数 =0.425; L=20*log10(20/(0.425*sqrt(0.425^2+1)*sqrt((0.3*0.425)^2+1))); %计算=0.425时的幅值 beta=10^(L/20);%计算beta 的值 T=4/; num=[T,1]; den=[beta*T,1]; Gc=tf(num,den) beta = 42.9619 T = 9.411 Gc = 9.412 s + 1 ----------- 404.3 s + 1 5.2 校正装置的选择 选择无源校正装置,设校正装置为 ()1s 1 s ++=T Ts G C β, ()13.4041412.9s ++= s s G c 校正后装置为: ()()())13.404)(13.0)(1() 1412.9(20s s s 1++++= =s s s s s G G G c 6.校正后系统分析 () 6.45)3.404arctan()3.0arctan()arctan()412.9arctan(90180' ''''=---+?-=c c c c c ωωωωωγ(解得 ?>='456.45 γ满足系统性能校正指标。 6.1 时域性能指标计算与MATLAB 分析 'c ω'c ω'c ω 系统闭环传函为: ()()())13.404)(13.0)(1() 1412.9(20s s s 1++++= =s s s s s G G G c 稳态误差ess 对于该系统的I 型系统, 静态误差系数分别为Kp=∞,Kv=20,Ka=0 单位阶跃输入时ess=1/(1+Kp)=0 单位斜坡输入时ess=1/Kv=1/20 单位加速度输入时ess=1/Ka=∞ 校正后单位阶跃曲线程序如下所示: clear; G=tf(20*[9.412,1],[conv(conv([1,1],[0.3,1]),[404.3,1]),0]); G=feedback(G,1) step(G) 校正后单位阶跃曲线如图所示: 图六 校正后系统的单位阶跃响应曲线 6.2 根轨迹稳定性分析 根轨迹:指系统开环传函的某一参量(一般为增益K )从0变化到∞时, 闭环系统特征方程根在s 平面上变化而形成的运动轨迹。 系统开环传函为: ()) 13.404)(13.0)(1() 1412.9(20s ++++== s s s s s G 1.根据开环传函用MATLAB 绘制根轨迹 校正后根轨迹程序如下所示: clear; G=tf(20*[9.412,1],[conv(conv([1,1],[0.3,1]),[404.3,1]),0]); rlocus(G); grid; 校正后根轨迹如图所示: 图七校正后系统的根轨迹 6.3 频域指标的计算与MATLAB分析 频域指标主要有截止频率ωc,穿越频率ωx,相位裕量γ,增益裕量h. 用MATLAB求解指标及bode图绘制: 校正后系统的对数幅频曲线程序如下所示: clear; G=tf(20*[9.412,1],[conv(conv([1,1],[0.3,1]),[404.3,1]),0]); nyquist(G); figure(2);bode(G); margin(G);[Gm,Pm,Wcg,Wcp]=margin(G) Grid Gm = 8.0509 Pm = 45.6332 Wcg = 1.6981 Wcp = 0.4356 校正后系统的对数幅频,相频曲线图如图所示: 图八校正后系统的对数幅频、相频特性曲线校正前,校正装置,校正后系统的对数幅频曲线程序如下所示: 图九 校正前后系统的对数幅频、 相频特性曲线 7.校正前后系统性能指标的比较与分析 7.1 动态指标 根据题目,校正后系统的性能指标为?>'45γ,05.0e 13.404)(13.0)(1() 1412.9(20s ++++== s s s s s G ,为单位负反馈。 当系统为单位斜坡信号输入时,K K e V 1 1ss ==,K=20 由图八得 1c 436.0-=s ω6.45=γ 1-x s 3.3=ω1.18h = 40.1sin 1 r == γ M ()[]% 98.31%1001-40.14.016.0=?+=σ()()[] s 61.211-5.21-5.12t 2 r r c s =++= M M ωπ 7.2 静态指标 校正后的静态指标: 该系统为I 型系统, 静态误差系数分别为Kp=∞,Kv=K,Ka=0 单位阶跃输入时ess=1/(1+Kp)=0 单位斜坡输入时ess=1/Kv=1/20 7.3小结 校正后系统超调量减小,调节时间缩短,上升时间减小,系统快速性得到改善,由于系统开环增益不确定,故首先按系统要求将静态误差首先确定得到开环增益为K=20。 校正前相位裕量为 8.31-,校正后为 456.45>,符合要求。相位裕量增加,提高了系统的相对稳定性;由于相位裕量增加,系统有裕量允许增大其开环增益,提高了稳定性能;系统高频段的幅值降低,提高了稳定性能。 8.设计总结 (1)题目特点 : 原系统为三阶一型系统,阶跃响应误差为0,速度响应误差为一常数。经计算,相位裕量小于o 0,故适合串联滞后校正装置进行系统校正。 (2)设计思路: 根据稳态误差要求,确定原系统开环传递函数()s 0G ,绘制对应的对数频率特性()w 0L ,计算截止频率c W 和相位裕量γ,如果' c c W W >,o 0<γ,就为串联滞后 校正。 (3)设计方法与步骤: 根据给定的相位裕量指标,确定校正后系统截止频率' c W ,原系统在' c W 处相位裕量() ?+'=γωγ' c ,o o 15~5=? 原系统相位裕量表达式带入' c W ,得() ' c ωγ,可确定' c W 确定校正装置β和T ,根据() βωlg 20' c 0=L ,求出β, T T βωωω1 ,101~4111'c 2= ??? ??== . 指标校验,()()()s s s c 0G G G = (4)结果校验: 验算校正后系统相位裕量γ和增益裕量h ,若不满足,重新选择?。 () 'c '180ω?γ+=o ,若o 45'>γ,则满足系统性能指标,否则不满足。 (5)结论: 若'' c c 0,γγωω<< 根据稳态误差要求,确定原系统开环传递函数()s 0G ,绘制对应的对数频率 特性()w 0L ,计算截止频率c W 和相位裕量γ。 设计校正装置: 设校正装置为()1 1 s s c ++= Ts T G α,若给定指标是截止频率' c ω,设提供最大超前 角频率为m ω,使' c m ωω=,() ()αωωlg 10m c ' c 0==-L L ,求出α,α ωm 1 = T ; 若给定相位裕量'γ,先确定装置在' c m ωω=处需提供的最大超前相角m ?, o o 12~5,'m =??+-=γγ?,m m sin -1sin 1??α+= ,根据校正原则,在原系统()ω0L 上找 到幅值为α10lg -的点,该点频率为' c m ωω=,求得σ ωm 1 = T 。 指标校验,()()()s s s c 0G G G =,验算校正后系统相位裕量γ,若不满足,重新选择?。 () ' c '180ω?γ+=o ,若o 45'>γ,则满足系统性能指标,否则不满足。 9.参考文献 [1]刘超,高双.自动控制原理的MATLAB 仿真与实践[M].北京:机械工业出版 社,2015.3 [2]孔凡才.自动控制原理与系统[M].北京:机械工业出版社,2003 [3]胡寿松.自动控制原理习题解析[M].北京:科学出版社,2003 [4]潘丰,徐颖秦.自动控制原理[M].北京:机械工业出版社,2015.2 实验四 线性系统的串联校正 一.实验目的 1.掌握线性系统的串联校正方法; 2.研究串联校正装置对系统性能的影响; 3.对线性系统串联校正进行计算机仿真研究,并对电路模拟与数字仿真结果进行比较。 二.实验内容 1.搭建待校正系统模拟电路,观测系统响应波形,记录超调量σ%和调节时间ts ; 2.加入串联校正环节,观测校正后的系统响应波形,记录超调量σ%和调节时间ts ; 3.运行线性系统串联校正的仿真软件,并对电路模拟与数字仿真结果进行比较。 三.实验步骤 在实验中观测实验结果时,可选用普通示波器,也可选用本实验台上的虚拟示波器。 如果选用虚拟示波器,只要运行ACES 程序,选择菜单列表中的相应实验项目,再选择开始实验,就会打开虚拟示波器的界面,点击开始即可使用本实验台上的虚拟示波器CH1、CH2两通道观察被测波形。具体用法参见用户手册中的示波器部分。 1.待校正线性系统 实验中所用到的功能区域: 阶跃信号、虚拟示波器、实验电路A1、实验电路A3、实验电路A4。 待校正线性系统模拟电路如图1-4-1所示,系统开环传递函数为:(0.041)K s s +,增益K =100,相角裕度028γ=。 图1-4-1待校正线性系统模拟电路(028γ=) (1) 设置阶跃信号源: A .将阶跃信号区的选择开关拨至“0~5V ”; B .将阶跃信号区的“0~5V ”端子与实验电路A3的“IN32”端子相连接; C .按压阶跃信号区的红色开关按钮就可以在“0~5V ”端子产生阶跃信号。 (2) 搭建待校正线性系统模拟电路: A .将实验电路A3的“OUT3”端子与实验电路A1的“IN12”端子相连接,将 线性系统串联校正 专业班级 学号 姓名 任课老师 学院名称电气信息学院 一、实验目的 1.熟练掌握用MATLAB 语句绘制频域曲线。 2.掌握控制系统频域范围内的分析校正方法。 3.掌握用频率特性法进行串联校正设计的思路和步骤。 二、基础知识 控制系统设计的思路之一就是在原系统特性的基础上,对原特性加以校正,使之达到要求的性能指标。最常用的经典校正方法有根轨迹法和频域法。而常用的串联校正装置有超前校正、滞后校正和超前滞后校正装置。本实验主要讨论在MATLAB 环境下进行串联校正设计。 三、实验内容 1.某单位负反馈控制系统的开环传递函数为) 1(4 )(+= s s s G ,试设计一超前 校正装置,使校正后系统的静态速度误差系数120-=s K v ,相位裕量050=γ,增益裕量dB K g 10lg 20=。 解:(1)根据题意,则校正后系统的增益20K =, 取20 ()(1) G s s s = +求出现系统的相角裕度。 num0=20; den0=[1,1,0]; w=0.1:1000; [gm1,pm1,wcg1,wcp1]=margin(num0,den0); [mag1,phase1]=bode(num0,den0,w); [gm1,pm1,wcg1,wcp1] margin(num0,den0) 运行结果: ans = Inf 12.7580 Inf 4.4165 Bode 图如下: M a g n i t u d e (d B )10 10 10 10 10 P h a s e (d e g ) Bode D iagram Frequency (rad/sec) 由图像可知可知,原系统在满足静态速度误差之后,幅值裕度为无穷大,相角裕度0012.8γ=, 4.42/c rad s ω=,不满足指标要求,因此采用串联超前校正装置,以增加系统的相角裕度。 (2)确定串联装置所需要增加的超前相位角及求得的校正装置参数。 程序代码: %****************求出校正前系统相角裕量********************% num0=20; den0=[1,1,0]; w=0.1:1000; [gm1,pm1,wcg1,wcp1]=margin(num0,den0); [mag1,phase1]=bode(num0,den0,w); [gm1,pm1,wcg1,wcp1]; margin(num0,den0); %****************求出a 的值*******************************% e=7.8; r=50; r0=pm1; phic=(r-r0+e)*pi/180; alpha=(1+sin(phic))/(1-sin(phic)); 第6章线性系统的校正方法(12学时)【主要讲授内容】 6.1 系统的设计与校正问题 6.2常用校正装置及其特性 6.3 串联校正 6.4 反馈校正 6.5 复合校正 6.6 控制系统的校正设计 【重点与难点】 1、重点: 串联滞后-超前校正网络的设计及复合校正方法。 2、难点: 反馈校正方法及应用。 【教学要求】 1、了解基本控制规律; 2、掌握超前校正装置、滞后校正装置、超前-滞后校正装置及其特性; 3、掌握运用频率法进行串联校正的过程; 4、了解运用根轨迹法进行串联校正的过程; 5、掌握反馈校正方法及应用; 6、掌握运用MATLAB进行控制系统的校正的方法。 【实施方法】 课堂讲授,PPT及上机实验配合 6.1系统的设计与校正问题 控制系统是由为完成给定任务而设置的一系列元件组成,其中可分成被控对象与控制器两大部分。设计控制系统的目的,在于将构成控制器的各元件和被控对象适当地组合起来,使之能完成对控制系统提出的给定任务。通常,这种给定任务通过性能指标来表达。当将上面选定的控制器与被控对象组成控制系统后,如果不能全面满足设计要求的性能指标时,在已选定的系统不可变部分基础上,还需要再增加些必要的元件,使重新组合起来的控制系统能够全面满足设计要求的性能指标。这就是控制系统设计中的综合与校正问题。 在校正与设计控制系统过程中,对控制精度及稳定性能都要求较高的控制系统来说,为使系统能全面满足性能指标,只能在原已选定的不可变部分基础上,引入其它元件来校正控制系统的特性。这些能使系统的控制性能满足设计要求的 性能指标而有目的地增添的元件,称为控制系统的校正元件。校正元件的形式及其在系统中的位置,以及它和系统不可变部分的联接方式,称为系统的校正方案。在控制系统中,经常应用的基本上有两种校正方案,即串联校正与反馈校正。 如果校正元件与系统不可变部分串接起来,如图6-1所示,则称这种形式的校正为串联校正。 图6-1 串联校正系统方框图 如果从系统的某个元件输出取得反馈信号,构成反馈回路,并在反馈回路内 G s的校正元件,见图6-2,则称这种校正形式为反馈校正。设置传递函数为() c 图6-2 反馈校正系统方框图 G s,可 应用串联校正或(和)反馈校正,合理选择校正元件的传递函数() c 以改变控制系统的开环传递函数以及其性能指标。一般来说,系统的校正与设计问题,通常简化为合理选择串联或(和)反馈校正元件的问题。究竟是选择串联校正还是反馈校正,主要取决于信号性质、系统各点功率的大小,可供采用的元件、设计者的经验以及经济条件等。在控制工程实践中,解决系统的校正与设计问题时,采用的设计方法一般依据性能指标而定。在利用试探法综合与校正控制系统时,对一个设计者来说,灵活的设计技巧和丰富的设计经验都将起着很重要的作用。 串联校正和反馈校正,是控制系统工程中两种常用的校正方法,在一定程度上可以使已校正系统满足给定的性能指标要求。把前馈控制和反馈控制有机结合起来的校正方法就是复合控制校正。在系统的反馈控制回路中加入前馈通路,组成一个前馈控制和反馈控制相组合的系统,选择得当的系统参数,这样的系统称之为复合控制系统,相应的控制方式称为复合控制。把复合控制的思想用于系统 线性系统的校正实验报告 (滞后校正) (超前校正) 超前校正: 已知单位负反馈系统被控对象的传递函数为: ()(1)(4)K G s S S S = ++,使 用根轨迹解析法对系统进行超前串联校正设计,使之满足: 1)阶跃响应的超调量%20%σ= 2)阶跃响应的调节时间不超过4(0.02)s t s =?=± 一、基于根轨迹法的串联超前校正的校正原理: 当系统的性能指标以时域形式提出时,通常用根轨迹法对系统进行校正。基于根轨迹法校正的基本思想是:假设系统的动态性能指标可由靠近虚轴的一对共轭闭环主导极点来表征,因此,可把对系统提出的时域性能指标的要求转化为一对期望闭环主导极点。确定这对闭环主导极点的位置后,首先根据绘制根轨迹的相角条件判断一下它们是否位于校正前系统的根轨迹上。如果这对闭环主导极点正好落在校正前系统的根轨迹上,则无需校正,只需调整系统的根轨迹增益即可;否 则,可在系统中串联一超前校正装置1()(1)1C aTs G s a Ts += >+,通过引入新的开环零点z c =-1/aT 和新的开环极点p c =-1/T 来改变系统原根轨迹的走向,使校正后系统的根轨迹经过这对期望闭环主导极点。 二、超前校正装置及其特性: 典型超前校正装置的传递函数可写为1()(0)1C aTs G s a Ts +=>+ 式中a 为分度系数,T 为时间常数 其频率响应1()1C jaT G j jTs ω ωω += + 幅频特性: ()c A ω= 相频特性: 111 22(1)()1a T tg aT tg T tg aT ωφωωωω----=-=+ 由于a>1,()φω始终大于0,即超前校正装置始终提供超前相角。 超前装置提供一个极点和一个零点 三、校正过程 实验八 线性系统串联校正 一、实验目的 1.熟练掌握用MATLAB 语句绘制频域曲线。 2.掌握控制系统频域范围内的分析校正方法。 3.掌握用频率特性法进行串联校正设计的思路和步骤。 二、基础知识 控制系统设计的思路之一就是在原系统特性的基础上,对原特性加以校正,使之达到要求的性能指标。最常用的经典校正方法有根轨迹法和频域法。而常用的串联校正装置有超前校正、滞后校正和超前滞后校正装置。本实验主要讨论在MATLAB 环境下进行串联校正设计。 1.基于频率法的串联超前校正 超前校正装置的主要作用是通过其相位超前效应来改变频率响应曲线的形状,产生足够大的相位超前角,以补偿原来系统中元件造成的过大的相位滞后。因此校正时应使校正装置的最大超前相位角出现在校正后系统的开环截止频率c ω处。 例5-1:单位反馈系统的开环传递函数为) 1()(+=s s K s G ,试确定串联校正装置的特性,使系统满足在斜坡函数作用下系统的稳态误差小于0.1,相角裕度045≥r 。 解:根据系统静态精度的要求,选择开环增益 101.0)1(11 )(2 00>?<++?==→→K s s k s s Lim s sE Lim e s s ss 取12=K ,求原系统的相角裕度。 >>num0=12; den0=[2,1,0]; w=0.1:1000; [gm1,pm1,wcg1,wcp1]=margin(num0,den0); [mag1,phase1]=bode(num0,den0,w); [gm1,pm1,wcg1,wcp1] margin(num0,den0) %计算系统的相角裕度和幅值裕度,并绘制出Bode 图 grid; ans = Inf 11.6548 Inf 2.4240 由结果可知,原系统相角裕度06.11=r ,s rad c /4.2=ω,不满足指标要求,系 统的Bode 图如图5-1所示。考虑采用串联超前校正装置,以增加系统的相角裕度。 确定串联装置所需要增加的超前相位角及求得的校正装置参数。 ),5,,45(0000c m c Φ=Φ=+-=Φ令取为原系统的相角裕度εγγεγγ m m ??αsin 1sin 1-+= e=5; r=45; r0=pm1; phic=(r-r0+e)*pi/180; alpha=(1+sin(phic))/(1-sin(phi c)); 将校正装置的最大超前角处的频率m ω作为 校正后系统的剪切频率c ω。则有: αωωω1 )(0)()(lg 2000=?=c c c c j G j G j G 即原系统幅频特性幅值等于αlg 20-时的频率,选为c ω。 根据m ω=c ω,求出校正装置的参数T 。即αωc T 1= 。 [il,ii]=min(abs(mag1-1/sqrt(alpha))); wc=w( ii); T=1/(wc*sqrt(alpha)); numc=[alpha*T,1]; denc=[T,1]; [num,den]=series(num0,den0,numc,denc);%原系统与校正装置串联 [gm,pm,wcg,wcp]=margin(num,den); %返回系统新的相角裕度和幅值裕图5-1 原系统的Bode 图实验四线性系统的串联校正
自动控制原理_线性系统串联校正
线性系统的校正方法
线性系统的校正 实验报告
实验八 线性系统串联校正
相关主题
文本预览