MicroDCS-SunyPCC800小型集散控制系统产品简介
1.系统概要
浙大中自集成控制股份有限公司在广泛的用户调查、专家访谈、市场调研与行业分析的基础上,吸收以浙江大学工业自动化国家工程研究中心、浙江大学工业控制技术国家重点实验室、浙江大学工业控制技术研究所数十年的科研成果,基于浙大中自长期的科技攻关与技术创新实力,并结合其丰富的系统集成与工程应用经验,经过不断分析总结、开发创新、测试改进与考核完善,成功推出了新一代MicroDCS—SunyPCC800小型集散控制系统。
SunyPCC800采用尖端的电子技术、仪表控制技术、现代控制理论,吸取迄今为止的各种控制系统的长处,是集成综合了智能仪表、多功能回路控制器、顺序控制器、可编程控制器功能的小型集散控制系统MicroDCS。具有先进控制策略、图形操作界面和在线实时组态工具;实现工业过程的实时监视、记录、操作、管理,及其连续控制、逻辑控制、顺序控制的综合;是一种实现各行各业复杂多样工业自动化构想的新型计算机控制系统。特别适合于国内企业组建控制系统和对现有控制设备进行技术改造,如工业窑、环保设备、反应器、精镏塔、加热炉、发酵罐、食品机械、干燥器、蒸发器、造纸机、以及中小型锅炉等类似控制要求的工业设备或工业过程。
设计目标:为复杂多样的需求提供标准开放的技术平台
设计思想:智能化、数字化、网络化
基于网络时代的开放化
独创SmartBus模块总线,网络技术深入到点,为用户定制特殊模块;
运用ODBC、OPC、ActiveX、TCP/IP技术,界面友好,系统开放;
基于数字时代的智能化
智能调理、通用输入,适应现场信号的复杂性;
在线自校正和自诊断,保证信号精度;
基于工业时代的可靠性
信号、模板、控制器、网络、电源全隔离,保证极强的抗干扰能力;
模板、控制器、电源、网络任意冗余设计,自由配置;
基于商业时代的经济性
所有信号提供隔离24VDC配电,降低用户配套设备成本;
结合行业应用,提供二次开发平台及快捷实用的集成解决方案;
先进控制与过程优化策略,充分挖掘企业潜力,创造最大经济效益。
MicroDCS-SunyPCC800综合了以下优点:
DCS冗余容错、分散控制、过程控制、配置灵活、网络强大的优点;
PLC快速响应、逻辑控制、价格便宜、小巧灵活、简单易学的优点;
IPC网络开放、数据开放、界面友好、易学易懂、易于维护的优点;
FCS工业标准、数字传输、实时网络、远程安装、设备管理的优点;
APC先进控制、过程优化、稳定过程、挖掘潜力、提高效益的优点;
DDZ成熟稳定、简单直观、价格低廉、小巧实用、用户成熟的优点;
MicroDCS-SunyPCC800克服了以下缺点:
× DCS系统庞大、价格昂贵、逻辑控制弱、安装调试周期长的缺点;
× PLC控制集中、系统封闭、运算能力差、模拟控制成本高的缺点;
× IPC控制集中、危险集中、辅助设备多、适应工业环境差的缺点;
× FCS标准不一、设备价高、总线成本高、有待进一步成熟的缺点;
× APC实施复杂、维护困难、支持成本高、专业化与通用性结合不足的缺点;× DDZ设计繁琐、维护困难、系统规模小、系统柔性严重不足的缺点。
DCS:集散控制系统/分布式控制系统
PLC:可编程逻辑控制器
IPC:基于工业计算机的工业控制系统
FCS:基于现场总线技术的工业控制系统
APC:先进控制与过程优化软件系统
DDZ:基于电动单元组合仪表的工业控制系统
2.技术特点
MicroDCS-SunyPCC800小型集散控制系统基于智能化、数字化、网络化设计思想;针对中小型工业设备或生产过程;具有模块化柔性设计;提供开放数据接口、现场总线与互联网接入;顺应时代发展潮流,吸收最新电子技术、网络技术、控制技术;实现过程控制、逻辑控制、顺序控制综合;既可以规模化分散联控,也可以低成本单机配置;具有可靠性高、系统开放、构成灵活、界面友好、功能强大、维护简便的特点。
可靠性高:自始至终贯彻可靠性设计思想,不断提高产品可靠性
冗余设计:电源冗余、网络冗余、控制模板冗余,可根据可靠性要求配置冗余方案;电源冗余,支持双电网输入,并具有过压、过流保护;网络冗余,保证系统通讯稳定可靠;控
制冗余,无扰动切换,保持控制连续性;
多处理器分布处理、协调工作:I/O模块、I/O模板、控制模板、通讯模板、显示记录模板均配置相应微处理器,分工协作、就地处理、自主工作,负荷分散、危险分散、耦合减
少、可靠性高、稳定性强,支持模板故障隔离、在线插拔、在线修复;
信号智能调理与隔离技术,全电子数字化设计,无旋转电位器,无磨损部件,全隔离、隔离配电、自诊断、自校正、自恢复、故障隔离,自动补偿环境影响;通用信号输入,软件
配置信号类型,基于SmartBus灵巧数字总线,信号无损传递,支持全系列信号模块自动
识别、任意混装,开放协议,可为用户定制特殊模块;
电磁兼容性(EMC)设计,信号端抗群脉冲干扰,振幅达到1000V,电源端为2000V,达到了EMC的相关标准;在电磁发射源5W功率/0.5m距离下,能完全抑制射频干扰;
多用户分级分区域安全设计、重要组态信息冗余化、可恢复,保证系统信息安全;
标准9U/6U/84TE机箱,针式连接器,有效的防尘与散热措施;
严格系统元器件的进货、检验、老化、筛选工作,模板入库前高温老化运行72小时,系统出厂前全面测试及连续运行考核120小时;
严格遵循国际《ISO9001质量保证体系》,贯彻于系统设计、开发、研制、生产、服务全过程。
系统开放:遵循标准,以不变应万变
系统分布式、硬件模块化、软件组件化。整个系统可分步实施,并根据需要不断进行横行或纵向扩展,能自由地组成从几个回路的小规模数据采集与单元控制系统到成百上千回路
的中大规模分布式监控与控制系统,既可用于化工、制药、建材、轻工、化肥、城市工程
等行业中的小型装置的控制,也可用于电力、石油、化工、冶金等行业中的中型装置和一
些联合装置的控制;
完全基于网络的概念,支持真正客户-服务器模式和Internet/Intranet浏览器技术,是一种可伸缩的柔性结构,根据网络规模大小,可以将不同站点设计成I/O服务器、报警服务器、
数据服务器、登录服务器、校时服务器、客户机等,有着极大的灵活性;
通用模拟量输入,不需调整硬件配置(不必更换任何器件或进行任何硬件设置或跳线),支持工业标准信号,如热电阻、热电偶、电流、电压、II/III型标准信号等的全范围输入,
只需软件设置信号类型、信号量程,并确认接线即可;
I/O模板基于SmartBus灵巧总线连接信号调理模块,支持全类型信号输入输出,包括模拟量输入、模拟量输出、开关量输入输出和脉冲量输入输出,而且信号调理模块化、智能化、
网络化,自动识别、任意混装、拆装方便、组态简单;
全方位开放设计,支持ActiveX、OPC、ODBC;系统提供数据库接口,可与常用的MIS 数据库直接接口;完全实现OPC规范;提供OLE自动化服务器接口、DDE数据交换接口、驱动程序接口等将系统全方位的开放于用户,允许用户进行功能扩展与个性发挥; 符合IEC61131-3标准的组态语言,包括功能块图FBD、梯形图LD、结构化文本ST等; 基于模块化的系统硬件、开放化的软件平台、专业化的应用软件,进行灵活集成与巧妙组合,如控制站/操作站/工程师站既可一体化集成配置,以节省空间、节省费用,也可分离配置、分布处理,满足不同层次、不同场合用户的需求。
功能强大:公欲善其事必先利其器
系统完全基于构件结构,各模块独立性强,系统稳定,扩展系统和引用第三方软件方便;
支持实时趋势曲线在线组态,用于系统运行分析、故障分析;灵活方便的报表组态方式,可形成多种多样的报表;输入输出仿真软件包,多种仿真手段,检查实施方案的正确性,节省成本;
SunyTech工业控制应用软件开发平台,基于中文WindowsNT/2000环境,全中文操作界面,全面支持ODBC、OPC、ActiveX、TCP/IP协议;多媒体操作界面色彩丰富,动画显示形象生动,在线帮助思路清晰,易学易懂不需专门培训;
透明的网络管理技术,无需任何网络编程知识和经验,在单机上无需联网即可完成分布在多区域的多机分布式监控系统的组态开发;
提供123种标准算法模块和高级控制算法,先进的图形组态方式,形象直观,只需指定模块,拖拉连线,填写参数,无需编程即可生成系统;
SunyRTM实时控制软件,扩展IEC61131-3标准控制语言,支持先进控制与过程优化算法,结合浙江大学数十年控制理论与控制应用研究成果,可扩展先进控制与过程优化算法集,如典型时变时滞工业过程的设定值鲁棒跟踪控制算法、具有最满意动、静态指标的自校正高级控制算法、无模型控制算法、专家自整定PID控制算法等。
维护简便:满足用户是持续改进的目标
19”,6U/9U工业标准,机柜内部互连规范化,服务始于端子,方便用户使用与维修;
在线故障诊断技术,自动确定故障点,模板可带电插拔,在线修复;
模板智能化、多功能、类型少、易维修,消除配置浪费、减少备件;
模拟量输入类型及数字量输入输出模式可软件设置,选型方便、改型容易;
模块化结构,方便用户按需要逐步进行系统扩展和升级;
基于视窗技术的系统软件,易学易懂,方便用户自行维护;
始终以满足用户广泛需求为新产品开发宗旨,收集用户关于产品功能、技术、性能、价格方面的要求,通过细致深入的工作,确保提供最先进适用的产品;
远程技术支持,及时迅速地提供系统指导、培训、维护服务。
3.硬件体系
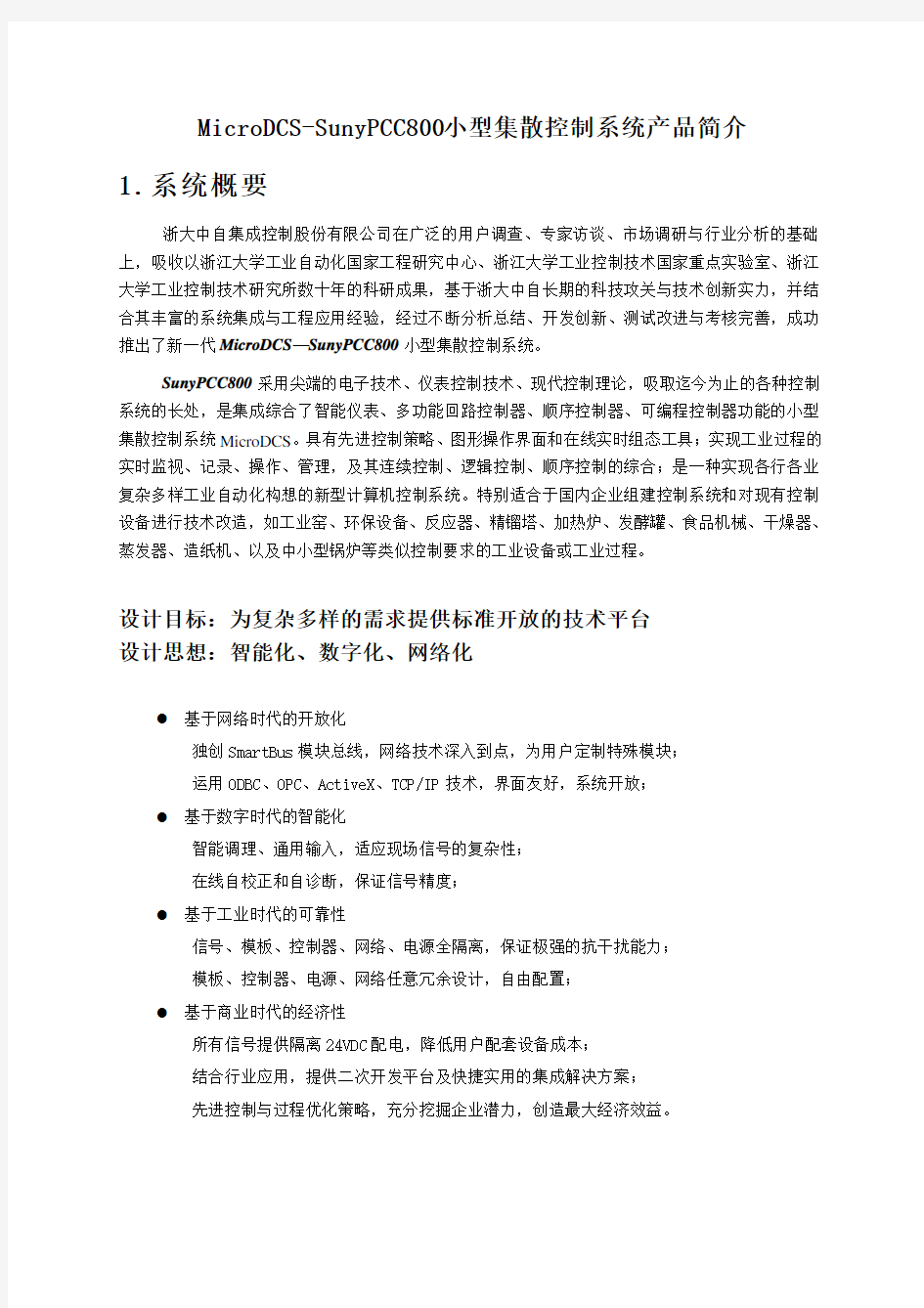
MicroDCS-SunyPCC800小型集散控制系统采用多处理器智能化体系结构,控制站硬件包括公共部件、功能模板、调理模块等几大部分。公共部件包括:机柜、机笼、控制模板、电源组件、散热组件、总线底板、集线器、光端机、转接端子板等;功能模板包括:I/O模板、通讯模板等;调理模块包括:模拟量输入、模拟量输出、数字量输入、数字量输出、脉冲量输入、脉冲量输出、特殊定制模块等。I/O模板基于SmartBus灵巧总线连接调理模块,并通过冗余现场总线相互连接。控制站采用工业以太网连接操作站/工程师站,工业以太网可冗余配置。
SunyPCC800小型集散控制系统控制站硬件结构图
SunyPCC800小型集散控制系统控制站由功能模板构成,功能模板是控制站内部完成特定任务的硬件板卡、运算处理单元、应用软件的组合。功能模板智能化,具有独立性、自主性,它及时有效地完成所分担的局部任务。包括:
显示记录模板:实现数据动态显示、实时操作、历史数据存储与浏览、报表处理与打印,是控制系统的本地人机界面;
控制模板:集成了高速处理器和智能双冗余控制网络CNet驱动,根据控制组态所生成的目标文件,解释运行,实现所设计的控制策略,并支持数据同步与冗余切换;
特殊功能模板;应工业过程特殊需要所开发的功能模板。如支持第三方产品的通讯管理模板、现场总线管理模板;
模拟量输入模板;实现模拟量点数据的信号隔离、类型选择、程控放大、数据采集、故障诊断、报警生成、数字滤波、温度补偿、线性校正、工程转换等,支持通用输入;
模拟量输出模板;实现模拟量点数据的校验、锁存、保护输出,可以根据配置要求在异常情况下,实现数据输出保持或输出指定设定值;
数字量输入/输出模板;实现数字量的输入/输出,包括数字输入的抖动消除、变化时间戳生成、实时响应;数字输出的校验、诊断、掉电记忆、上电保护等;
脉冲量输入模板;实现脉冲量的输入;
通用信号输入/输出模板;实现模拟量输入、模拟量输出、数字量输入输出、脉冲量输入等全系列信号类型的混合输入与输出,实现智能调理、软件设置、自动识别、任意混装,并
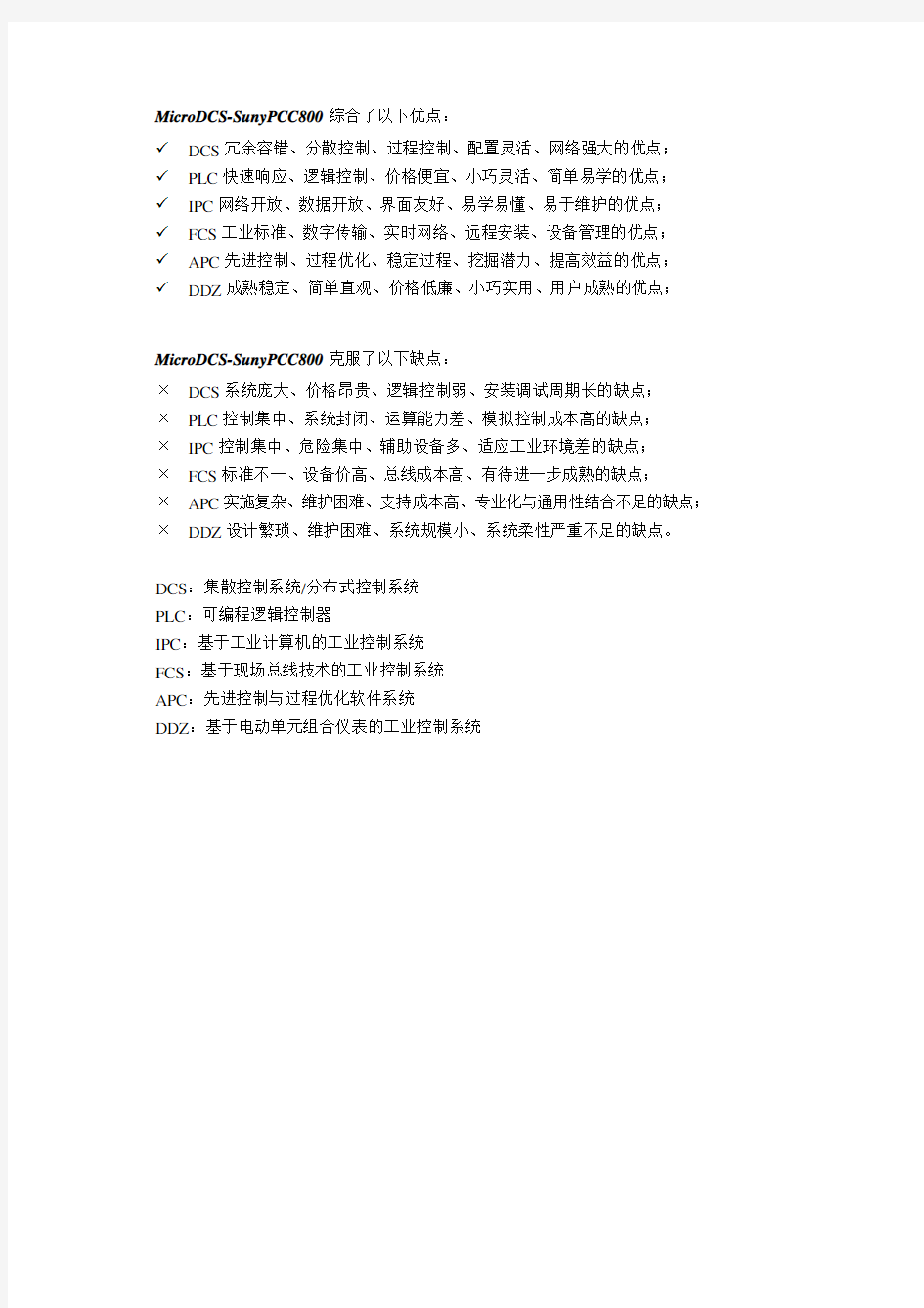
SunyPCC800小型集散控制系统控制站结构示意图
功能模板具有可靠性高、功能强大、维护方便的特点:
控制模板支持1:1热备冗余配置,无扰动切换;电源组件支持冗余配置,并联使用,均流运行;
I/O模板智能化,运算与处理能力有效分散,大幅度降低控制模板运算负担与网络通信负荷,使得模板级运行状态检测和故障诊断能力得以提高;采用现场总线技术取代并行总线,有效隔离各模板故障;热插拔设计,支持在线维护,无需设备停机;
模块采用智能调理与信号隔离技术,通道全隔离,无需另配隔离器,将通道窜入的干扰拒之门外,并支持隔离配电功能;
模板均有状态指示灯,包括运行、故障、网络等,各模板运行状态一目了然;
系统规模:根据用户需要进行最佳配置,满足绝大多数工业控制场合需要;
单机基本配置,具有最多128个通用模拟量输入,或128个模拟量输出,或256个数字量输入或输出,可构成64个PID控制回路;
单机扩展配置,通过远程I/O机箱扩展,可实现最多256个通用模拟量输入,或最多256个模拟量输出、或最多512个数字量输入或输出,可构成最多128个PID控制回路;
网络分布配置,系统网络支持32个网络节点,支持最多16套控制站、16套操作站或工程师站,系统最大规模:AI:4096,AO:4096,DIO:8192。
控制站采用19”9U工业标准,以机笼与总线底板为固定结构,在底板上插入控制模板和各种I/O 功能模板;1#~8#插槽可配置各种类型的I/O功能模板,9#、10#插槽均可配置控制模板,配置双控制模板,则可构成1:1热备冗余;主机笼支持最多8块I/O模板与2块控制模板,扩展机笼可扩展支持最多8块I/O模板,因此单机配置最多可支持16块I/O模板与2块控制模板;电源组件提供24VDC/6A和5VDC/7A直流电源,可冗余配置;各类部件主要分为公共部件、功能模板、I/O调理模块及电源模块、连接器件、附属设备五大类。
4.网络结构
MicroDCS-SunyPCC800小型集散控制系统采用二层网络结构,分别是系统网络SNet、控制网络CNet。I/O功能模板通过SmartBus连接智能I/O调理模块;CNet连接各个功能模板;SNet采用工业以太网,可连接多套控制站,或多台操作站/工程师站,并可无缝连接MIS/ERP。
SunyPCC800小型集散控制系统网络结构图
系统网络采用工业以太网,符合IEEE802.3标准;其通讯速率10/100Mbps,传输介质为5类非屏蔽双绞线。系统网络采用可靠性高的冗余结构,热备份工作,可以保证在任何一条网络失效的情况下不影响系统通讯。系统网络拓扑结构为星型和菊花链型,在一定区域范围的各节点都通过双绞线连到一个集线器上,各区域又通过双绞线或光纤把多个光端机/集线器互连在一起。系统网络的最大通讯距离与集线器/光端机的个数和使用的通讯介质有关。双绞线每段最大长度为120m,光纤每段最大长度为1850m。系统网络涉及的硬件有操作站/工程师站、控制站、集线器/光端机以及传输介质,系统网络设计的最大节点数为32个。其中操作员站/工程师站 1~16台,现场控制站1~16台。
控制网络是控制站功能模板,如各I/O模板、控制模板之间的数据通道,控制网络采用CAN (Control Area Network)现场总线,符合ISO11898 CAN Specification 2.0B标准,是一种按优先级抢占式的总线网络,采用双绞线为通讯介质,最大通讯速率1.2Mbps,在MicroDCS-SunyPCC800中最多支持16块I/O模板。它具有以下特点:
多主工作方式,网络上任一节点均可在任意时刻主动地向网络上其他节点发送信息,而不分主从,通信方式灵活,且无需地址等节点信息,可方便地构成多机备份系统;
网络节点信息分成不同的优先级,可满足不同的实时要求,高优先级的数据最多可在134us 内得到传输;
采用非破坏性总线仲裁技术,当多个节点同时向总线发送信息时,优先级较低的节点会主动地退出发送,而最高优先级的节点可不受影响地继续,传输数据,从而大大节省了总线冲突仲裁时间。尤其是在网络负载很重的情况下也不会出现网络瘫痪情况;
只需通过报文滤波即可实现点对点、一点对多点及全局广播等几种方式传送接收数据,无需专门的“调度”;
采用短帧结构,传输时间短,受干扰概率低,具有极好的检错效果;
每帧信息都有CRC校验及其他检错措施,保证了极低的数据出错率;
节点在错误严重的情况下具有自动关闭输出功能,以使总线上其他节点的操作不受影响。
灵巧总线SmartBus是调理模板内部连接I/O模块与模板控制器的实时控制网络,实现调理模板控制器和所有智能I/O模块之间的互连和信息传送,具有以下特点:
节点数可达24个;
支持点对点发送和广播发送功能;
节点错误严重时不会影响其他节点正常工作;
传输时间短,不易干扰,具有极好的检错效果;
容易实现信号和信号之间,信号和主机之间的隔离;
容易实现模块级功能扩展。
5. 操作员站/工程师站
MicroDCS-SunyPCC800小型集散控制系统既可以一体化集成配置控制站、操作员站与工程师站,也可分布配置或支持多台独立的操作员站与工程师站。
系统操作员站是工业现场操作人员使用的设备,操作人员通过键盘或鼠标可以灵活、方便、准确地监视过程量,以及根据流程变化调整过程参数等。工程师站用于对应用系统进行功能组态、组态数据下载,也能代替操作员站发挥运行监视的作用。操作员站与工程师站均采用高可靠性的工业微机,推荐硬件配置要求如下:
操作员站工程师站
工业操作台工业操作台或计算机桌
CPU:PIII800,RAM:128M,HD:40G,FD:1.44M;
10/100M以太网;
标准键盘、鼠标;
19”/21”彩色显示器,分辨率1280×1024;17”/19”/21”彩色显示器,分辨率1024x768;
并行口:打印,并用于插入SunyTech 6.0加密锁;
操作系统:Windows2000;
6.SunyTech工业控制应用软件平台
SunyTech工业控制应用软件平台是SunyPCC800小型集散控制系统的系统软件包,它基于WindowsNT/2000和SROS多任务实时操作系统,基于组件结构设计,采用32位多任务、多线程等最新技术,集现场数据采集、算法执行、实时数据和历史数据处理、报警和安全机制、流程控制、动画显示、趋势曲线和报表输出以及监控网络等功能于一体,已广泛应用于石油、化工、电力、冶金、交通、楼宇自动化、医药、食品等行业。
SunyPCC800系统软件体系图
SunyPCC800系统的软件体系分为工程师站组态软件、操作员站实时监控软件及现场控制站实时控制软件三大部分,三部分软件分别运行在不同层次的硬件平台上,并通过控制网络、系统网络进行通讯,彼此互为配合、互为协调,交换各种数据及管理、控制信息,完成整个集散控制系统的各种功能。SunyTech工业控制应用软件平台由实时控制组件(SunyRTM)、系统配置组件(SunyCFG)、人机界面组件(SunyHMI)三大类组件构成,如下表所示:
SunyTech工业控制应用软件平台
实时控制组件(SunyRTM)系统配置组件(SunyCFG)人机界面组件(SunyHMI)
系统组态软件
硬件配置软件 SunyMaker
SunyIEC 算法编辑器 SunyCFG
画面运行系统
实时数据库 SunyView
SunyRTM 实时运行系统 SunyRDB
SROS 多任务实时操作系统 SunySOE SOE分析软件
6.1 软件产品特点
系统软件完全基于组件(COM)结构,所有模块与实时数据库通过COM接口无缝连接,各模块独立性强,系统稳定性高,扩展系统和引用第三方软件方便;
基于Microsoft Windows NT(SP4)/2000操作系统,运行实时高效,使用方便灵活;
提供符合IEC61131-3标准的编程控制语言,编程环境功能强大、直观易用,降低编程人员的训练时间,减少编程费用,有效缩短工程开发周期;
提供多达123个标准模块,既包含IEC61131-3标准功能块,也有扩展功能块,既可以实现顺序控制,也可以实现连续过程的精确控制;
提供开放的算法接口,可以嵌入用户自己以C语言或IEC61131-3语言编制的控制程序,用户编制的功能块可以在不同的工程中反复使用;
提供功能强大的仿真调试功能,可以进行断点设置,单步执行。工程人员能够很容易的调试程序,查找错误。同时支持在线监控程序执行,并可以强制修改变量;
提供在线组态、在线下装、运行系统操作、变量操作(强制、赋值、观测)。支持TCP/IP 协议,可在本地实现对远程系统的在线监控、诊断、远程操作;
提供了双机热备功能,实现双机冗余,实现了实时数据与历史数据的热备;
开放的数据接口可与常用的MIS数据库系统如Sybase,InfoMix,dBase,Oracle等直接接口;
系统完全实现OPC规范(OPC客户及OPC服务器);
支持ActiveX 控件,提供众多功能强大、实用的控件;
独特的透明网络管理技术,用户无需任何网络编程知识和经验,即可完成分布式监控系统的组态开发,支持TCP/IP、Modem、RS485/422/232等多种网络体系结构;
画面制作系统功能强大,具有丰富的图库及专用控件;
强大的报警功能,报警组功能,报警优先级别管理,实时记录与历史查询报警;
类似Excel的内嵌报表,提供丰富的报表函数,方便制作报表模板;
6.2方便易用的组态软件
SunyTech工业控制应用软件平台功能全面、易于使用,它由人机界面软件(SunyHMI)、系统配置软件(SunyCFG)、实时控制软件(SunyRTM)等组件及其所含的软件模块组成,实现工程管理组态、实时数据库组态、控制算法组态、系统硬件组态、图形组态、历史记录组态、报表组态、报警组态、在线组态在线下装、安全性组态等功能。
工程管理组态工程管理组态是通过工程管理器(ProjectMan)来完成的。它管理计算机上存在的多个工程,具有新建、搜索、修改、删除以及备份和恢复工程的功能,如图所示。
实时数据库组态实时数据库组态是通过实时数据库编辑器(SunyRDB)来完成的。用来定义各站点的变量信息,包括各站的组成设备及设置的属性,各点的数据采集与转换、报警、历史记录、安全区等属性。
控制算法组态算法编辑器(SunyIEC)用于生成系统所有连续控制、逻辑控制、顺序控制、特殊处理算法等控制策略。该软件采用IEC61131-3国际可编程控制组态语言标准,提供了功能块图、梯形图和顺序控制语言共三种编程语言,能够全面满足过程控制领域的组态需求。组态元素放置灵活,自动格线对齐,触点、线圈、功能块和变量等可用文本进行注释;具备块剪切、拷贝、粘贴、删除等功能,具备对前次操作步骤的撤消和恢复功能,大大提高编程效率,达到事半功倍的效果;强大的查找功能,可在当前程序段也可在当前整个工程中查找变量、常数、位号、模块,并进行标记,用户只需用鼠标点击相应的信息就可以直接跳到所要查找的位置。提供缩放功能,使用户更清晰地查看页面或按照缩小的比例看到页面中更多的内容;多种仿真手段,既可针对某个任务单独进行仿真,也可进行全工程的仿真;即可进行连续仿真,也可进行断点仿真。
系统硬件组态系统硬件组态是通过系统配置软件(SunyCFG)来完成的。它是用于配置DCS 系统的模板、模块及控制模板的专用软件,同时可以实时监控系统内所有模板和模块数据,具备在线工程下装,模板、模块及组态等方面的故障诊断的功能。
图形组态利用SunyMaker的画面开发系统,可方便的绘制出应用系统所需的各种总貌图、流程图和工况图,所有画面中均可以嵌入报警、报表和趋势控件。画面开发系统提供丰富的绘图工具,调色板支持无限色,支持24种过渡色效果;提供十几个图形库,几百个元件,降低了开发者的设计难度;此外还提供趋势曲线、窗口控制、超级文本显示和多媒体等多类控件。
报表组态SunyMaker提供了一个高度模仿Excel的功能全面的内嵌式报表系统,工程人员可以任意设置报表格式,对报表进行组态。而且SunyMaker为工程人员提供了丰富的报表函数,实现各种运算、数据转换、统计分析、报表打印等。既可以制作实时报表,也可以制作历史报表。另外,工程人员还可以制作各种报表模板,实现多次使用,减少重复工作。
报警、历史记录组态SunyMaker提供报警及历史记录的组态功能。可以方便的设置数据点的报警组、各项报警限、报警偏差、变化率报警限等属性来满足不同的报警需要;可以选择变化记录和定时记录的方式来记录数据点的历史数据,提供给历史趋势和历史报表进行显示分析。
安全性组态在SunyMaker中,可以对画面上的图形对象设置访问权限,同时给操作者分配访问优先级和安全区。操作者的操作优先级从1~999,每个操作者和对象的操作优先级级别只有一个。系统安全区共有64个,一个用户可有多个安全区权限,每个对象也可有多个安全区权限,保障系统的安全运行。优先级大于900的用户还可以配置其他操作者,为他们设置用户名、口令、访问优先级和安全区。
6.3 功能强大的监控软件
SunyTech工业控制应用软件平台集成了功能强大、运行稳定的实时监控软件,运行于WindowsNT/2000操作系统下。由实时控制软件(SunyRTM)、画面监控软件(SunyHMI)、系统配置软件(SunyCFG)等组件组成。主要有高速的实时数据库、画面及流程显示、控制调节、系统硬件诊断、报警、报表、趋势显示、DDE、OPC、ODBC、ActiveX接口、WEB服务、SOE分析等功能。
画面及流程显示SunyMaker的画面开发系统中制作的组态图形通过画面运行系统SunyView显示并运行,实现与SunyRTM的数据交换,同时完成报警、历史记录、趋势曲线等监视功能,并可生成历史数据文件。
实时趋势显示和历史趋势显示趋势分析是控制软件必不可少的功能,SunyView对该功能提供了强有力的支持和简单的控制方法。实时趋势实时显示数据的变化情况,可同时显示四条曲线。SunyView既支持标准的历史趋势曲线,又支持定制个性化历史趋势曲线。
报警功能报警和事件记录是控制软件必不可少的功能,当变量的数值或数值的变化异常时,将产生报警,以便操作者采取必要的措施。主要包括变量报警事件、操作事件、用户登录事件和工作站事件。报警和事件在报警窗中会按照设置的过滤条件实时显示出来。
报表功能SunyView在实时运行时提供内嵌式报表系统,工程人员可以任意设置报表格式,对报表进行组态。SunyView为工程人员提供了丰富的报表函数,实现各种运算处理、数据转换、统计分析、报表打印等。
冗余功能SunyRTM提供全面的冗余功能,能够有效地减少数据丢失,增加系统可靠性,大大方便系统维护。SunyRTM提供三重意义上的冗余功能,即双设备冗余、双机冗余和双网络冗余。
网络功能独特的透明网络管理技术,用户无需任何网络编程知识和经验,即可完成分布在多区域的多机分布式监控系统的组态开发;支持TCP/IP、Modem、485/422/232等多种网络体系结构,支持分布式历史数据库及分布式报警以及数据采集。
全方位的开放性SunyRTM提供ODBC数据库接口,可与常用的MIS数据库系统如Sybase,InfoMix,dBase,Oracle等直接接口;完全实现OPC规范,系统既是OPC客户,也可作为OPC服务器,可以向任意支持OPC客户的软件提供数据。另外系统还提供OLE Automation接口、DDE数据交换接口、驱动程序接口、用户编程接口等,将系统全方位的开放于用户。
故障诊断与恢复在工业现场中,由于通讯故障而引起的损失是可能存在的,为了将这种损失降为最小,软件精心优化了通讯故障的诊断机制,可以在极短的时间内报告故障的发生,并诊断出发生故障的设备,有助于现场工程师及时排除险情。
事件记录功能SunyCFG提供了功能强大的过程顺序事件记录、操作人员的操作记录、过程参数的报警记录等多种事件记录功能,并配以相应的事件存取、分析、打印、追忆等软件。系统具有最小事件分辨间隔(1ms)的事件序列记录(SOE)卡件,可以通过多卡时间同步的方法同时对256点信号进行高速顺序记录。
6.4 实时高效的控制软件
现场控制站是SunyPCC800小型集散控制系统的核心部分,现场信息的采集,各种控制算法的实现都在控制站上完成。为保证现场控制站的高可靠运行,在控制模板的软件上采取了一系列的可靠性保护措施,如控制模板与控制网络的故障诊断、网络冗余、主从切换、故障恢复、数据掉电保持等。现场控制站控制软件运行在一套高效的实时多任务操作系统下,该实时多任务操作系统为基于优先级调度的抢占式操作系统,各功能模块依据其功能的轻重缓急被赋予不同的优先级,再辅以对突发中断事件的实时处理,因而能有效的利用CPU资源,使各功能模块协调地工作。现场控制站软件主要完成以下功能:数据采集、数据转换、算法运行、控制输出、与其他站点通讯及实时广播数据、控制站自诊断及故障恢复、冗余切换、在线组态在线下装、工程在线升级与数据保持。
数据采集、转换及输出在工程师站组态并编译生成的各种控制算法以及实时数据库等,经网络在线下装到控制站后,在控制模板中进行信号采集、工程量换算、控制算法运算、控制信号的输出等。控制模板采用循环扫描,立即更新的方式。
实时控制支持周期任务和非周期任务。任务具有多种触发方式,每个周期任务可以设定独立的运算周期。系统控制周期可以达到模拟量200ms,数字量100ms。
丰富的工业控制算法实时控制软件内嵌120多个标准模块,分为数学函数功能块、逻辑函数功能块、代数函数功能块、三角函数功能块、比较函数功能块、选择函数功能块、计时器、计数器、触发器、输入输出模块、信号处理模块、控制算法模块、对象辨识模块等。其中控制算法模块中既包含经典的PID控制,也有积分分离死区PID控制、模糊控制、自整定PID控制、无模型控制等。对象辨识模块中提供了性能优越的辨识手段,可用于在线或离线辨识工业过程模型。信号处理模块可实现对信号的滤波、平滑、预测等。用户可以利用现有功能块实现各类顺序及连续过程的精确控制。同时提供开放的算法接口,可以嵌入用户自己以C语言或IEC61131-3语言编制的控制程序,用户编制的功能块可以在不同的工程中反复使用。结合浙大中自丰富的工程实践经验,实时控制软件内嵌了一些针对特定行业的专家控制系统,如造纸过程的KAPPA值软测量、蒸煮升温曲线的在线优化、打浆过程的优化模型、洗衣粉行业喷粉过程的软测量、前配过程的顺序控制、锅炉过程的燃烧系统专家控制等。
先进的控制功能实时控制软件所提供的实时控制算法模块,具有先进的控制功能,控制精度高,能有效提高企业经济效益。如针对某1200M3的大厦,在室外昼夜温度从-5℃到+25℃之间变化的条件下,要求保持20℃左右的恒温。使用实时控制软件所提供的模糊调节器时,室内外温度变化如图所示。
通讯功能控制模板连接了控制网络和系统网络,它不仅要实时的采集各种I/O模板的数据、与其他控制模板通讯,而且要通过系统网络与操作员站、工程师站进行通讯。它真正支持双网络冗余,在仅有一根通讯线的情况下能完全正常的工作,并且具有网络自诊断和故障报警的功能。主控控制模板广播实时数据,备份控制模板实时跟踪主控状态,实现控制模板冗余及无扰切换。
在线功能提供在线下装、执行系统操作、变量操作的功能,支持远程操作,可在本地实现对远程系统的在线监控、诊断、远程操作。支持工程在线升级,能实现工程的无扰切换。
7.SunyRTM功能块说明 7.1 SunyRTM标准功能块
编号 功能块名 功能
逻 辑 函 数
1 And 逻辑与
2 Not 逻辑非
3 Or 逻辑或
4 Xor 异或
5 Shr 右移
6 SHL 左移
7 Ror 循环右移
8 Rol 循环左移
数 学 函 数
9 Add 加法(2)
10 Mul 乘法
11 Sub 减法
12 DIV 除法
13 Mod 余数
14 Expt 乘方
15 Move 赋值
16 Abs 绝对值
17 Sqrt 平方根
三 角 函 数
18 Sin 正弦函数
19 Cos 余弦函数
20 Tan 正切函数
21 Asin 反正弦函数
22 Acos 反余弦函数
23 Atan 反正切函数
代 数 函 数
24 Exp 求幂 25 Ln 自然对数
26 Log 以十为底的对数运算
比 较 函 数
27 Eq 相等
28 Ne 不等
29 Gt 大于
30 Lt 小于
31 Ge 大于等于
32 Le 小于等于
选 择 函 数
33 Sel 二选一
34 Max 选择最大值
35 Min 选择最小值
36 Limit 限值
37 Mux 七选一
触发器、计数器、计时器
38 RTrig 上升沿
39 FTrig 下降沿
40 RS RS触发器
41 SR SR触发器
42 CTU 递增计数器
43 CTD 递减计数器
44 SEMA 信号器
45 CTUD 复合计数器
46 TP 随机脉冲
47 Ton ON延迟
48 Toff OFF延迟
49 RTC 实时时钟
7.2 SunyRTM扩展功能块
编号 功能块名 功能
逻 辑 函 数
1 _And 按位逻辑与
2 _Not 按位求非
3 _Or 按位逻辑或
4 _Xor 按位异或
5 Test 位选择
6 Sbit 位置位
7Rbit 位复位
数 学 函 数
8 Add4 加法(4)
9 Inv 相反数
10 Floor 取整
11 Recip 倒数 12 Sqr 平方
13 Scale 比例
三 角 函 数
14 Ptd 极坐标换成笛卡儿坐标
15 Dtp 笛卡儿坐标换成极坐标
代 数 函 数
16 Pol 二次方程
17 tProc 转成百分数
18 fProc 转换百分比
19 Avr3 3点平均值
20 Per 负载
21 Ndgt 四舍五入
22 Avrt 滑动平均值
23 Stat 求统计值
24 Intg 积分
25 Diff 导数
26 Df3 三点导数
27 Ddf 二次导数
比 较 函 数
28 Eq0 等于零
29 Ne0 不等于零
30 Nlim 间隔号
31 Cmp 匹配分析
32 Alarm 时间匹配
33 Sign 符号函数
34 CmpN 正匹配
35 CmpE 负匹配
选 择 函 数
36 Ltn 滞区
37 Frwd 预测
38 nSel 五选一
随 机 函 数
39 Rand 随机数
40 Gp01 按指定概率产生信号
信 号 处 理 函 数
41 Smth 指数平滑
42 LRate 速度限制
43 Apert 盲区
44 Dzone 非灵敏区
45 Hstr 滞区
46 G01 位振荡
47 G1 移位单元
48 Pila 线性增长
49 Gpt0 指定概率的序列单元
50 Gsin 正弦信号
51 Time 标准时间
52 Date 标准日期
输 入 输 出 函 数
53 Rport 读取端口
54 WPort 端口写入
55 Exit 从程序退出
显示函数(在实时运行模块中不支持)
56 Shbit 离散变量显示
57 Sfloat 模拟变量显示
58 Menu 菜单控制
59 Stext 文本显示
信 号 处 理
60 Peack 波峰过滤
61 Ins0 插入零
62 Imp 循环脉冲
63 Smth2 二阶平滑
64 Pwm 宽脉冲调制
65 Preg 三点控制
66 Qreg 控制质量
67 Obj 对象模型
控 制 算 法
68 Pid PID控制
69 Pdd PDD控制
70 Sfz 模糊控制参数设置
71 Fuzzy 模糊控制
72 IdentOne 一阶对象辨识
73 IdentTwo 二阶对象辨识
74 AutoPid 自整定PID
8.MicroDCS-SunyPCC800小型集散控制系统选型指导 类别 型号 名称 类别型号
名称 ST8111 19”/9U 主机笼 ST8311
单路全隔离Ⅱ型AI 模块 ST8112 19”/6U 扩展机笼 ST8312
单路全隔离Ⅲ型AI 模块 ST8121 6U 总线底板(含端子) ST8313
单路全隔离热电偶AI 模块 ST8132 电源组件(200W) ST8314单路全隔离热电阻AI 模块 ST8133 散热组件 ST8315单路全隔离多功能AI 模块 ST8141 显示记录模板 ST8321单路全隔离电流AO 模块 ST8151 液晶显示组件 ST8322单路全隔离电压AO 模块 ST8153 鼠标、键盘 ST8331双路光隔离DI 模块 ST8154 USB 硬盘 ST8341双路光隔离DO 模块 ST8161 控制模板 ST8351双路光隔离DIO 模块 ST8171 集线器/光端机 ST8361单路光隔离脉冲量PI 模块 ST8181 CNet 智能通讯模板 ST8371隔离AI 电源模块 ST8515 SunyPCC800用户光盘 ST8372隔离AO 电源模块 ST8511 SunyPCC800硬件手册 ST8373
隔离DI 电源模块 ST8514 SunyPCC800软件手册 ST8374
隔离DO 电源模块 ST8516 SunyPCC800培训手册 I O 调 理 模 块 及 电 源
模
块
ST8381
CNet 通讯模块 公 共 部 件 ST8192 SunyPCC800软件手册
ST800119”/2200mm 标准机柜 ST8211 16路AI 模板 ST8002
19”/1800mm 标准机柜 ST8221 16路AO 模板 ST800319”/1600mm 标准机柜 ST8231 32路DI 模板 ST8004通讯电缆 ST8241 32路DO 模板 模板导轨 ST8251 16路AIO 模板 面板 ST8261 32路DIO 模板 盲板 ST8271 16/32路通用IO 模板
I/O 模块固定器 功 能 模 板 ST8281 16路PI 模板
附 属 设 备 ST8005附件 配电模块固定器
定义说明:
ST8X 1X 2X 3 ST8 ——S unyPCC800集散控制系统;X 1 —— 模板类别; X 2 —— 同类别模板的不同类型; X 3 —— 同类型模板的不同型号。
MicroDCS-SunyPCC800小型集散控制系统简介
9. 主要技术性能指标及环境要求:
1.精确度 历史数据库:20G HDD
AI误差:≤0.1% 实时画面数量:512
AO误差:≤0.2% 7.输入输出特性
时间顺序纪录(SOE)时间分辨率:1ms AI输入阻抗:电压10MΩ;电流250Ω
2.抗干扰能力 III 型AO负载:4-20mA,500Ω
AI共模干扰抑制比:≥120Db II型 AO负载:4-20mA,500Ω
AI差模干扰抑制比:≥50dB DI点:输入阻抗6.8K
隔离阻抗:20M? @ 500V DO最大负载能力:24VDC,100mA
3.可靠性 PI频率:0-30KHz
冗余电源(选项) 现场接线端子均加有过压及过流保护
冗余网络 8.显示媒体
冗余控制模板(选项) 液晶屏:15.1”,TFT
冗余I/O模板(选项) 分辨率:1024*768
带电插拔板卡 颜色:16位
AO保持(系统不掉电) 亮度:200cd/m2
平均无故障运行时间MTBF ≥100000h 9.电源特性
系统可利用率:≥99.95% 交流供电:165V-265V AC,50/60Hz
4.实时性 直流输出:最大负载时压降<0.8%
扫描周期:数字量0.1s;模拟量0.2s 波纹系数:<5%
回路控制周期:0.2s 过流保护:负载>额定值的110-150%
逻辑控制周期:0.1s 过压保护:电压>标称值的125-145%
实时画面响应时间:≤0.5s 10.环境条件
5.网络性能 工作温度:0~45℃
SmartBus模块总线:19200BPS 存贮运输温度:-40~55℃
控制网通讯速率:1MBPS 工作湿度:10~85%RH
管理网通讯速率:10M/100MBPS 存贮运输温度:≤93%RH(40℃)
6.容量 大气压力:86~106kPa
实时数据库:65536
现场控制站:AIO128;DIO256
浙江浙大中自集成控制股份有限公司1
填空1.1975年,世界上第一套集散控制系统由Honeywell公司首先向市场推出,其型号是TDC2000。2. 操作站的基本功能包括显示、操作、报警、系统组态、系统维护和报告生成。 3. OSI参考模型的七层分别是物理层、数据链路层、网络层、传输层、会话层、表示层、应用层。 4.TDC3000系统中,一条LCN网最多可连40个模块,通过扩大器可连645个模块。 5. CS3000系统主要由操作站、现场控制站、工程师站、通信总线和通信网关等部分组成。 6.MACS现场控制站由控制机笼、主控制器、电源模块、智能I/O模块、端子模块、通信网络、控制机柜等部分组成。 7. 现场总线是一种数字式、双向传输、多分支结构和计算机局部网络的底层控制网络。 8. 典型的现场总线有Profibus、CAN、FF等。 9. 现场总线的基本设备有现场总线变送器、温度变送器、电流-现场总线转换器和现场总线-电流变换器等。10. PROFIBUS现场总线的组态软件是STEP711。11. 计算机控制系统由工业控制机和生成过程两大部分组成。12. 计算机控制系统按参与控制的计算机不同,可分为工业控制机控制系统、PLC控制和单片机控制。13. 集散控制系统是计算机技术、控制技术、显示技术和通信技术相结合的产物。14. 计算机网络的拓扑结构主要有总线型、星型、环型、树型和网状型。 15. JX-300X集散控制系统控制站卡件有主控制卡、数据转发卡和I/O卡。16. JX-300X DCS 的基本组态软件是sckey,实时监控软件是Advantrol/Advantrol-Pro17. 现场控制站的基本功能包括反馈控制、逻辑控制、顺序控制、批量控制、数据采集与处理和数据通信。18. TPS集散控制系统的网络类型主要有工厂信息网路PIN、TPS过程控制网络TPN和万能控制网络UCN。19. TDC3000集散控制系统的万能控制网UCN上挂接着过程管理站PM、先进过程管理站APM、万能控制网络UCN等。20. CS3000集散控制系统的FCS有标准型、扩展型和紧凑型三种。21. MACS通信网络主要分系统网络SNET、监控网络MNET和企业管理网ENET层次。22. 计算机控制系统按其结构不同可分为集中结构和分散结构两大类。23. 集散控制系统由工业控制机、通信网络和现场检测控制设备三大部分组成。24. 常用的通信介质主要有双绞线、同轴电缆和光纤。25. 集散控制系统又称为分散控制系统英文简称DCS,现场总线控制系统简称为FCS。26. 集散控制系统的设计思想为集中管理、分散控制。27. JX-300X DCS的通信网络主要有SBUS总线、过程控制网SC netII和信息管理网EYHERNET三个层次。 28.TDC3000系统的三种通信网络主要是局部控制网LCN、万能控制网UCN和数据高速通道DHW。29. TPS集散控制系统中,一个HPMM最多能安装40块IOP和40块后备IOP。30. CS3000系统RIO标准型FCS中,一个FCU最多连1031个节点。31. MACS系统主要由网络、工程师站、操作员站、高级计算站、管理网网关、系统服务器、现场控制站、通信控制站等部分组成。31.集散控制系统的设计一般分为方案论证、方案设计、工程设计和系统文件设计四个
DCS(集散控制系统)模拟题 第一部分: 1、DCS产生于那个年代?是从哪两大控制系统发展而来? 答:DCS产生于二十世纪70年代中期,由美国霍尼韦尔公司提出的。它是由直接数字控制DDC(Direct Digital Control)或监督计算机控制SCC(Supervisory Computer Control)发展来的。 2、DCS的概念如何描述? 答: DCS(Distributed Control System)分散控制系统的简称,国内一般习惯称之为集散控制系统DCS是一个由过程控制级和过程监控级组成的以通信网络为纽带的多级计算机系统,综合了计算机、通信、显示和控制等4C技术,其基本思想是分散控制、集中操作、分级管理、配置灵活以及组态方便。 3、DCS的系统结构是什么?可图示。 4、何为全集成自动化(TIA)? 答: TIA 是高度自动化的工业系统产品简称。TIA 的中文含义是,完全集成自动化。TIA 是一个由西门子公司从1996年开发和完善的策略构造和策略理念。这套策略定义了所有涉及到的个体部件,工具和相应的服务(替换部件服务,等)是如何构成一个整体的。这个整体承担着四个自动化层面的一致性。管理层面、策划层面、控制层面、工作层面。
TIA 的这个一致性提供给相应企业在创造价值环节(OEM,系统策划和客户终端)一个简便并且经济的过程。子定义:一个自动化系统必须要由拖动系统(变频器+ 马达)和可编程控制器来实现。 5、PROFIBUS-DP网络最多可连接多少个站点?其通讯率是多少? 答: PROFIBUS-DP总线上最多站点(主-从设备)数为126。通讯波特率从9.6Kbit/s到12Mbit/s。 第二部分:综合应用题 制作方案书 某企业年产20万吨/年三元硫基复合肥的生产主要有以下4个工段完成:磷酸工段、氢钾工段、制氨工段、复合工段,各工段的I/O点如下表: 置1台ES、4台OS,报表、报警打印机各1台,每个工段配置1套AS,I/O可集中配置也可分布式配置,按15%余量。并选用合适的通讯网络。 请写出较合理的方案配置书(包含以下内容:1、配置方案说明2、系统配置图3、I/O 模板数量计算说明4、软硬件配置清单)。 附:可供选择的主要硬件 1、工控机 SIMATIC箱式PC
集散控制系统课程学习报告 学院名称:电气学院 专业班级: 1 学生姓名: 学生学号: 2013年12 月
集散控制系统学习心得 通过本课程的学习,让我对集散控制系统有了初步的了解下面就本学期的学习对本课程做介绍。 一、集散控制系统(DCS)简介 DCS,即所谓的分布式控制系统,或在有些资料中称之为集散系统,是相对于集中式控制系统而言的一种新型计算机控制系统,它是在集中式控制系统的基础上发展、演变而来的。在系统功能方面,DCS和集中式控制系统的区别不大,但在系统功能的实现方法上却完全不同。 首先,DCS的骨架——系统网络,它是DCS的基础和核心。由于网络对于DCS整个系统的实时性、可靠性和扩充性,起着决定性的作用,因此各厂家都在这方面进行了精心的设计。对于DCS的系统网络来说,它必须满足实时性的要求,即在确定的时间限度内完成信息的传送。这里所说的“确定”的时间限度,是指在无论何种情况下,信息传送都能在这个时间限度内完成,而这个时间限度则是根据被控制过程的实时性要求确定的。因此,衡量系统网络性能的指标并不是网络的速率,即通常所说的每秒比特数(bps),而是系统网络的实时性,即能在多长的时间内确保所需信息的传输完成。系统网络还必须非常可靠,无论在任何情况下,网络通信都不能中断,因此多数厂家的DCS均采用双总线、环形或双重星形的网络拓扑结构。为了满足系统扩充性的要求,系统网络上可接入的最大节点数量应比实际使用的节点数量大若干倍。这样,一方面可以随时增加新的节点,另一方面也可以使系统网络运行于较轻的通信负荷状态,以确保系统的实时性和可靠性。在系统实际运行过程中,各个节点的上网和下网是随时可能发生的,特别是操作员站,这样,网络重构会经常进行,而这种操作绝对不能影响系统的正常运行,因此,系统网络应该具有很强在线网络重构功能。 其次,这是一种完全对现场I/O处理并实现直接数字控制(DOS)功能的网络节点。一般一套DCS中要设置现场I/O控制站,用以分担整个系统的I/O和控制功能。这样既可以避免由于一个站点失效造成整个系统的失效,提高系统可靠性,也可以使各站点分担数据采集和控制功能,有利于提高整个系统的性能。DCS的操作员站是处理一切与运行操作有关的人机界面(HMI-Human Machine Interface或operator interface)功能的网络节点。系统网络是DCS的工程师站,它是对DCS进行离线的配置、组态工作和在线的系统监督、控制、维护的网络节点,其主要功能是提供对DCS进行组态,配置工作的工具软件(即组态软件),并在DCS在线运行时实时地监视DCS网络上各个节点的运行情况,使系统工程师可以通过工程师站及时调整系统配置及一些系统参数的设定,使DCS随时处在最佳的工作状态之下。与集中式控制系统不同,所有的DCS都要求有系统组态功能,可以说,没有系统组态功能的系统就不能称其为DCS。 DCS自1975年问世以来,已经经历了二十多年的发展历程。在这二十多年中,DCS虽然在系统的体系结构上没有发生重大改变,但是经过不断的发展和完善,其功能和性能都得到了巨大的提高。总的来说,DCS正在向着更加开放,更加标准化,更加产品化的方向发展。作为生产过程自动化领域的计算机控制系统,传统的DCS仅仅是一个狭义的概念。如果以为DCS只是生产过程的自动化系统,那就会引出错误的结论,因为现在的计算机控制系统的含义已被大大扩展了,它不仅包括过去DCS中所包含的各种内容,还向下深入到了现场的每台测量设备、执行机构,向上发展到了生产管理,企业经营的方方面面。传统意义上的DCS现在仅仅是指生产过程控制这一部分的自动化,而工业自动化系统的概念,则应定位到企业全面解决方案,即total solution 的层次。只有从这个角度上提出问题并解决问题,才能使计算机自动化真正起到其应有的作用。 进入九十年代以后,计算机技术突飞猛进,更多新的技术被应用到了DCS之中。PLC是一种针对顺序逻辑控制发展起来的电子设备,它主要用于代替不灵活而且笨重的继电器逻
断路器的几大功能: A、短路保护:就是火线和零线接触,瞬间电流很大,断路器跳闸。 B、过载保护:就是用电电流超过电器的额定电流,断路器跳闸。 C、漏电保护(电漏电保护装置):就是当漏电电流超过30毫安时,漏电附件自动拉闸,主要是保护人体安全的。 1P断路器与DPN断路器的区别: 一、1P就是火线进断路器,零线不进,DPN是火线和零线同时进断路器,切断时火线和零线同时切断,对居民用户来说安全性更高。 二、2P断路器也为双进双出,即火线和零线都进断路器,但2P断路器的宽度比1P和DPN断路器宽一倍。 三、漏电保护器:实际上是指带漏电保护装置的断路器,作用是当漏电电流超过30毫安时,漏电附件自动拉闸,保护人体安全。 断路器(空气开关)的极性和表示方法 切断火线 220V :1P单极. 双极2P: 220V 火线与零线同时切断 双极1P+N:220V 相线+中性线同时切断 三级3P: 380V 三相线全部切断 四级4P: 380V 三相火线一相零线全部切断。 家庭用电路的配置方法为: 1、总开关一回路 2、照明一回路 3、客厅、卧室插座一回路 4、厨房、卫生间插座一回路
5、每个空调各一回路 空调如何换算功率及匹配断路器空气开关 1匹=750W 1.5匹=1.5×750W=1125W 2匹=2×750W=1500W 2.5匹=2.5×750W=1875W 此计算法以此类推。 1例:一个2P(2匹)的空调回路配的断路器规格大小为DPN20A,那么他准许通过的最大功率就为4400W(220V*20A)。而一个2匹的空调的额定功率为2000W,但考虑到空调启动瞬间功率会突然加大,所以配一个20A的断路器(足矣)。注:断路器的大小并不是配得越大越好,配得过大,反而起不到过栽保护作用,使家用电器受损。 2例:3匹空调应选择多少A的空气开关?(220V电压) 750W×3匹=2250W×3倍(冲击电流)=6750W÷220V=30.68A≈32A。 3例:5匹空调应选择多少A的空气开关?( 380V电压) 750W×5匹=3750W×3倍(冲击电流)=1125W÷380V=29.60≈32A(功率÷电压=安培) 安装或施工说明: 1.、按产品说明书进行安装。 (1) 应安装在干燥、清洁的地方。不能装在露天和潮湿地方,不能装在灰尘多、受烟薰的地方。因为雨水、潮气或灰尘、烟雾侵入漏电开关,能使金属件生锈动作不灵、绝缘降低,或使电子元件受到腐蚀,致使整机过早损坏。 (2) 漏电开关的进、出线不可接反。因为进线接电源,当漏电开关跳闸后,其辅助电源亦断开,其内晶闸管瞬间导通不会损坏;若出线接电源,跳闸后辅助电源不能断开,晶闸管有一特性,就是导通后即使触发信号消失,仍旧保持导通状态,则晶闸管因较长时间导通而烧毁,整机因而损坏。 2、应由电工动手安装。因电工有一定的电气知识和电力工作经验,能选择恰当位置、安装正确、走线美观、出现问题可当即处理。 3安装中可能出现的问题及处理方法 (1) 按试跳按钮不会动作。检查电源和接线,若均无问题,则是漏电开关故障,应换新的。 (2) 安上后合上开关即动作,送不上电。先检查电源电压,看是否过压引起漏电开关动作;若电压正常,退掉负载线,若一开仍跳,系漏电开关故障,应换新的,若不跳,系被保护的线路泄漏过大,超过漏电开关的额定漏电动作电流。 采购指南: (1)由线路的计算电流来决定断路器的额定电流;(大概有99%的设计者做到了这一条)。 (2)断路器的短路整定电流应躲过线路的正常工作启动电流。(大概有30%的设计者注意到了这一条)。 (3)按线路的最大短路电流来校验低压断路器的分断能力;(大概有10%的设计者注意到了这一条)。 (4)按照线路的最小短路电流来校验断路器动作的灵敏性,即线路最小短路电流应不小于断路器短路整定电流的1.3 的设计者注意到了这一条)。5%倍;(大概有. ,来校验断路器的额定短路接通能力(最大电流预期峰值))按照线路上的短路冲击电流((即短路全电流最大瞬时值)5即后者应大于前者。(大概有1%的设计者注意到了这一条)。 DZ47LE系列漏电断路器使用说明书 适用范围 系列适用于交流50Hz,额定工作电压230V~400V,额定电流至100A的线路漏电断路器DZ47LE中,用来对人进行间接接触保护,以及对建筑物及类似用途的线路进行过电流保护。也可对由于过电流保护装置不动作而持续存在的接地故障引起的火灾提供保护。带过电压保护的漏电断路器还能对由于电网故障引起的电压过高进行保护。 本系列产品在低压配电系统中已经越来越多地被采用作为接地故障和直接接触、间接接触电击的后备保护。 本产品复合GB16917和IEC61009标准。
-自动控制原理知识点汇总
————————————————————————————————作者:————————————————————————————————日期:
自动控制原理知识点总结 第一章 1.什么是自动控制?(填空) 自动控制:是指在无人直接参与的情况下,利用控制装置操纵受控对象,是被控量等于给定值或按给定信号的变化规律去变化的过程。 2.自动控制系统的两种常用控制方式是什么?(填空) 开环控制和闭环控制 3.开环控制和闭环控制的概念? 开环控制:控制装置与受控对象之间只有顺向作用而无反向联系 特点:开环控制实施起来简单,但抗扰动能力较差,控制精度也不高。 闭环控制:控制装置与受控对象之间,不但有顺向作用,而且还有反向联系,既有被控量对被控过程的影响。 主要特点:抗扰动能力强,控制精度高,但存在能否正常工作,即稳定与否的问题。 掌握典型闭环控制系统的结构。开环控制和闭环控制各自的优缺点? (分析题:对一个实际的控制系统,能够参照下图画出其闭环控制方框图。) 4.控制系统的性能指标主要表现在哪三个方面?各自的定义?(填空或判断) (1)、稳定性:系统受到外作用后,其动态过程的振荡倾向和系统恢复平衡的能力 (2)、快速性:通过动态过程时间长短来表征的 e来表征的 (3)、准确性:有输入给定值与输入响应的终值之间的差值 ss 第二章 1.控制系统的数学模型有什么?(填空) 微分方程、传递函数、动态结构图、频率特性 2.了解微分方程的建立? (1)、确定系统的输入变量和输入变量 (2)、建立初始微分方程组。即根据各环节所遵循的基本物理规律,分别列写出相应的微分方程,并建立微分方程组 (3)、消除中间变量,将式子标准化。将与输入量有关的项写在方程式等号的右边,与输出量有关的项写在等号的左边 3.传递函数定义和性质?认真理解。(填空或选择) 传递函数:在零初始条件下,线性定常系统输出量的拉普拉斯变换域系统输入量的拉普拉斯变
第8章集散型控制系统 (DCS) 回顾自动化技术发展的历史,可以看到它与生产过程本身的发展密切相关,是一个从简单形式到复杂形式,从局部自动化到全局自动化,从低级智能到高级智能的发展过程。20 世纪70 年代初,受生产过程控制和管理要求的驱动以及4C 技术 ( Computer, Communication, Control and CRT )的影响,过程控制系统由直接数字控制系统DDC( Direct Digital Control )发展成为以“危险分散” 为基本设计思想的集散型控制系统 DCS( Distributed Control System ),目前正向着现场总线控制系统FCS( Fieldbus Control System )方向发展。 本章主要讲述集散控制系统的一些基本知识,重点介绍两种常用的分散型控制系统:德国西门子 ( Siemens )公司的基于PLC( Programmable Logic Controller )的分散控制系统PCS7 和北京和利时( Hollysys )公司的MACS 系统。 8.1 集散控制系统基础集散控制系统又称多级计算机分布控制系统和分布式控制系统,它是以微处理器为基础的集中分散型控制系统,根据分级设计的基本思想,实现功能上分离,位置上分散,以达到“分散控制为主,集中管理为辅”的控制目的。目前,集散控制系统已在工业控制领域得到了广泛应用,越来越多的仪表和控制工程师已经认识到集散控制系统必将成为过程工业自动控制的主流。在计算机集成制造系CIMS ( Computer Integrated Manufacturing System )或计算机集成作业系统CIPS ( Computer Integrated Production System )中,集散控制系统将成为主角,发挥其优势。随着计算机技术和网络技术的发展,系统的开放性不仅能使不同制造厂商的集散控制系统产品互联,方便地进行数据交换,而且也使得第三方的软件可以方便地在现有的集散控制系统上应用。目前,我国已引进不同型号集散控制系统的数量多达几百套,同时也有自行研发的DCS 系统,应用领域遍及石化、轻化、冶金、 建材、纺织、制药等各行各业。 8.1.1 集散控制系统的基本组成和特点 尽管集散控制系统的种类和制造厂商繁多(如Siemens 、Honeywell 、Tayler 、Foxboro 、Yokogawa 、AB 、ABB 等),控制系统软、硬件功能不断完善和加强,但从系统的结构分析,它们都是由过程控制站、操作站和通信系统三部分组成。这三部分之间的关系如图8-1-1 所示。 ( 1 )过程控制站过程控制站由分散过程控制装置组成,是集散控制系统与生产过程之间的界面,它的主要功能是分散的过程控制,生产过程的各种过程变量通过分散过程控制装置转化为操作监视的数据,而操作的各种信息也通过分散过程控制装置送到执行机构。在分散过程控制装置内,进行模拟量与数字量的相互转换,完成控制算法的各种运算,对输入与输出量进行有关的软件滤波及其它的一些运算。其结构具有如下特征:
小型断路器 1、适用范围 HSLM8-63高分断小型断路器适用于交流50/60Hz,额定电压单极230V,二、 三、四极400V,额定电流至63A线路的过载和短路保护之用,也可以在正常情 况下作为线路的不频繁操转换之用。 该断路器广泛用于工业、商业高层和民用住宅等各种场所。符合GB10963、IEC60898标准。 2、主要规格 按额定电流ln分:1A、3A、6A、10A、16A、20A、25A、32A、40A、50A、63A按 极数分: a、单极短路器; b、带二个保护极的断路器; c、带三个保护极的短路器; d、带四个保护极的短路器; 按瞬时脱扣器的型式分:B型(3ln-5ln)、C型(10ln-14ln)。 3、技术参数 ■额定短路分断能力 额定电流极数额定电压(V)额定电路分断电流(A)功率因数COSφ 1-63A1223060000.7 1-63A23440060000.7 ■机械电气寿命 电气寿命(次)机械寿命(次)操作频率(次/时)额定电流(A) 6000100002401-32 60001000012040-63 ■接线:适用于25平方毫米以下导线连接 名称参数 额定电流ln(A)1-61016、20253240、5063导线标准截面积S(mm)1 1.5 2.5461016 ■过电流保护特性 脱扣器额定电流ln起始状态试验电流规定时间预期结果备注1-63冷态 1.13ln t≥ln不脱扣 1-63紧接着前项 试验后进行 1.45ln t<ln脱扣电流在5s内稳定地上升至规定值 ln≤32冷态 2.55ln1s<t<60s脱扣 ln>32冷态255ln1s﹤t﹤120s脱扣 1-63冷态3ln t≥0.1s不脱扣B型
自动控制原理基本知识测试题 第一章自动控制的一般概念 一、填空题 1.()、()和()是对自动控制系统性能的基本要求。 2.线性控制系统的特点是可以使用()原理,而非线性控制系统则不能。 3.根据系统给定值信号特点,控制系统可分为()控制系统、()控制系统和()控制系统。 4.自动控制的基本方式有()控制、()控制和()控制。 5.一个简单自动控制系统主要由()、()、()和()四个基本环节组成。 6.自动控制系统过度过程有()过程、()过程、()过程和()过程。 二、单项选择题 1.下列系统中属于开环控制的为()。 A.自动跟踪雷达 B.无人驾驶车 C.普通车床 D.家用空调器 2.下列系统属于闭环控制系统的为()。 A.自动流水线 B.传统交通红绿灯控制 C.普通车床 D.家用电冰箱 3.下列系统属于定值控制系统的为()。 A.自动化流水线 B.自动跟踪雷达 C.家用电冰箱 D.家用微波炉 4.下列系统属于随动控制系统的为()。 A.自动化流水线 B.火炮自动跟踪系统 C.家用空调器 D.家用电冰箱 5.下列系统属于程序控制系统的为()。 A.家用空调器 B.传统交通红绿灯控制 C.普通车床 D.火炮自动跟踪系统 6.()为按照系统给定值信号特点定义的控制系统。 A.连续控制系统 B.离散控制系统 C.随动控制系统 D.线性控制系统 7.下列不是对自动控制系统性能的基本要求的是()。 A.稳定性 B.复现性 C.快速性 D.准确性 8.下列不是自动控制系统基本方式的是()。 A.开环控制 B.闭环控制 C.前馈控制 D.复合控制 9.下列不是自动控制系统的基本组成环节的是()。 A.被控对象 B.被控变量 C.控制器 D.测量变送器 10.自动控制系统不稳定的过度过程是()。 A.发散振荡过程 B.衰减振荡过程 C.单调过程 D.以上都不是 三、简答题 1.什么是自动控制?什么是自动控制系统? 2.自动控制系统的任务是什么? 3.自动控制的基本方式有那些? 4.什么是开环控制系统?什么是闭环控制系统?各自的优缺点是什么? 5.简述负反馈控制系统的基本原理及基本组成。 6.自动控制系统主要有那些类型? 7.对控制系统的基本要求是什么?请加以说明。 8.什么是自动控制系统的过度过程?主要有那些种? 四、名词解释 1.被控对象 2.被控变量 3.给定值 4.扰动量 5.定值控制系统 6.随动控制系统 7.程序控制系统
集散型(DCS)控制系统采用计算机技术对生产过程进行集中监视、操作、管理和分散控制,适用于化肥、化工、食品、粮食、制药、智能生物、饲料等行业自动化系统改造及自动化系统生产线,能够保证生产安全,提高自动化水平和管理水平,提高产品质量,提高劳动生率,降低人工费用、能源消耗和原材料消耗。 系统结构 ◆集散型控制系统采用标准化、模块化和系列化设计,由集中管理部分、分散控制检测部分和通信部分组成。 ◆集中管理部分包括管理计算机、工程师站、操作站。管理计算机用于系统的信息管理和优化控制,工程师站用于组态和维护,操作站用于监视和操作。 ◆分散控制监测部分包括控制站、监测站或现场控制站,用于控制和监测。 ◆通信部分连接系统各个分布部分,完成数据、指令及其他信息的传递。 系统特点 ◆各工作站独立完成合理分配的数据采集、处理、计算、监视、操作、控制等规定任务。 ◆控制功能齐全,控制算法丰富,集连续控制、顺序控制和批量控制于--体,系统可控性高。 ◆操作方便、显示直观、可监视性好。
◆人机会话系统实用、简捷,工艺流程状态图、参数表、历史趋势图、实时趋势图、信息报警、故障分析、操作指导等窗口画面丰富。 ◆DCS控制系统可以通过电脑在专用软件环境下进行编程,较小的参数修改和程序变更送入PLC不
会引起中断运行,并且PLC的内变量参数也可在线读写,因而方便了程序的维护和检查。 ◆积木式系统结构,开放式、标准化、模块化设计的硬件和软件,配置灵活,适应性和扩充性好。 ◆实时采集、分析、记录、监视、操作控制过程对象参数,在线修改系统结构和组态回路,在线维护局部故障,系统可用性高。 ◆采用系统结构容错设计,任意单元失效时可保持系统的完整性,全局性通信或管理站失效时可维持局部站的工作。 ◆具有事故报警、双重化措施、在线故障处理等手段,系统可靠性、安全性高。 山东祺龙电子有限公司创建于1998年,是山东省高新技术企业、全国肥料机械设备协作联盟副理事长单位,设有市级自动配料系统工程技术研究中心。拥有国家发明专利和实用新型专利二十多件。集科研开发、工程设计、生产安装、调试服务于一体的国内规模较大的自动化控制计量设备专业制造商。公司创建二十年来,一直致力于化肥行业自动化配料计量设备、自动包膜系统、自动控制系统的研制开发。并承接有机肥、掺混肥、微量元素肥、水溶肥、硅肥等整条生产线的制造、安装、调试。产品远销巴基斯坦、越南、南非等国家和地区。因在化肥行业的良好口碑,被授予“全国肥料机械设备协作联盟副理事长单位”、“中国化肥行业优质设备配套供应商”、“自动化计量设备指定供应商”等荣誉称号。
集散控制与现场总线课程设计 设计名称:集散控制系统的控制算法应用 班级: 10自动化(1)班 姓名: 学号: 1005073028 指导教师:丁健
摘要 集散控制系统(Distributed control system)是以微处理器为基础的对生产过程进行集中监视、操作、管理和分散控制的集中分散控制系统,简称DCS 系统。该系统将若干台微机分散应用于过程控制,全部信息通过通信网络由上位管理计算机监控,实现最优化控制,整个装置继承了常规仪表分散控制和计算机集中控制的优点,克服了常规仪表功能单一,人-机联系差以及单台微型计算机控制系统危险性高度集中的缺点,既实现了在管理、操作和显示三方面集中,又实现了在功能、负荷和危险性三方面的分散。DCS系统在现代化生产过程控制中起着重要的作用。 关键词:监视操作管理控制
一、集散控制系统简介 1.1 集散控制系统简介 集散控制系统(Total Distributed Control System,DSC)是20世纪70年代中期发展起来的以微处理器为基础的分散型计算机控制系统。它是控制技术(Control)、计算机技术(Computer)、通信技术(Communication)、阴极射线管(CRT)图形显示技术和网络技术相结合的产物。该装置时利用计算机技术对生产过程进行集中监视、操作、管理和分散控制的一种全新的分布式计算机控制系统。 1.2 集散控制系统的组成 一个基本的DCS应包括至少一台现场控制站、一台操作员站、一台工程师站(也可利用一台操作员站兼做工程师站)、一条系统网络四大组成部分: 1.2.1现场控制站 现场控制站是DCS的核心,系统主要的控制功能由它来完成。系统的性能、可靠性等重要指标也都要依靠现场控制站保证,因此对它的设计、生产及安装都有很高的要求。现场控制站的硬件一般都采用专门的工业级计算机系统,其中除了计算机系统所必需的运算器(即主CPU)、存储器外,还包括了现场测量单元、执行单元的输入/输出设备,即过程量I/O或现场I/O。在现场控制站内部,主CPU和内存等用于数据的处理、计算和存储的部分被称为逻辑部分,而现场I/O 则被称为现场部分。 1.2.2操作员站 操作员站主要完成人机界面的功能,一般采用桌面型通用计算机系统,如图像工作站或个人计算机等。其配置与常规的桌面系统相同,但要求有大尺寸的显示器(CRT或液晶屏)和性能好的图形处理器,有些系统还要求每台操作员站使用多屏幕,以拓宽操作员的观察范围。为了提高画面的显示速度,一般都在操作员站上配置较大的内存。 1.2.3工程师站 工程师站是DCS中的一个特殊功能站,其主要作用是对DCS进行应用组态。
本答案仅供参考。 第1章绪论 1.1 什么是过程计算机控制系统?它由哪几部分组成?通过具体示例说明。 答:它是指由被控对象、测量变送装置、计算机和执行装置构成,以实现生产过程闭环控制的系统,它综合了计算机过程控制和生产工艺过程。例 如温度控制系统。 1.2 计算机控制工业生产过程有哪些种类型? 答:计算机控制工业生产过程一般有五种类型: 操作指导控制系统;直接数字控制系统;监督控制系统;集散控制系统; 现场总线控制系统。 1.3 计算机控制系统的硬件一般有哪几大主要组成部分?各部分是怎样互相联系 的?其中过程通道有几种基本类型?它们在系统中起什么作用? 答:计算机控制系统的硬件一般包括:主机、外部设备、过程输入输出设备。 两个过程通道,一个是输入通道,另一个为输出过程通道。 输入过程通道包括:A/D通道----把模拟信号转换成数字信号后再输入;
DI 通道-----直接输入开关量信号或数字量信号。 输出过程通道包括:D/A 通道----把数字信号转换成模拟信号后再输出; DO 通道-----直接输出开关量信号或数字量信号。 1.4 直接数字控制系统的硬件由哪几部分组成? 答:直接数字控制系统的硬件主要有计算机(主机)、过程输入输出通道、操作台和计算机辅助设备组成。如下图所示。 1.5 数字PID 控制算法有几种形式?各有什么特点? 答:数字PID 控制算法有位置式、增量式、速度式三种形式。PID 位置式根 据偏差计算阀门的位置,PID 增量式根据偏差计算阀门的变化;PID 速度式根据偏差变化程度计算阀门的变化。 1.6 试推导计算机控制系统PI 控制算法的位置式、增量式和速度式。 答:模拟PI 控制算法为 ])(1 )([)(0?+=t I p dt t e T t e k t u 其中,p k ----比例增益 I T ----积分时间常数 在采样周期相当短暂时,用矩形法近似代替积分项∑?=≈k i t i Te dt t e 00)()(,
第一章自动控制的一般概念 1.1 自动控制的基本原理与方式 1、自动控制、系统、自动控制系统 ◎自动控制:是指在没有人直接参与的情况下,利用外加的设备或装置(称控制装置或控制 器),使机器、设备或生产过程(统称被控对象)的某个工作状态或参数(即被控量)自 动地按照预定的规律(给定值)运行。 ◎系统:是指按照某些规律结合在一起的物体(元部件)的组合,它们相互作用、相互依存, 并能完成一定的任务。 ◎自动控制系统:能够实现自动控制的系统就可称为自动控制系统,一般由控制装置和被 控对象组成。 除被控对象外的其余部分统称为控制装置,它必须具备以下三种职能部件。 ?测量元件:用以测量被控量或干扰量。?比较元件:将被控量与给定值进行比较。
?执行元件:根据比较后的偏差,产生执行作用,去操纵被控对象。 参与控制的信号来自三条通道,即给定值、干扰量、被控量。 2、自动控制原理及其要解决的基本问题 ◎自动控制原理:是研究自动控制共同规律的技术科学。而不是对某一过程或对象的具体控 制实现(正如微积分是一种数学工具一样)。 ◎解决的基本问题: ?建模:建立系统数学模型(实际问题抽象,数学描述) ?分析:分析控制系统的性能(稳定性、动/稳态性能) ?综合:控制系统的综合与校正——控制器设计(方案选择、设计) 3、自动控制原理研究的主要内容 经典控制理论现代控制理论 研究对象单输入、单输 出系统 (SISO) 多输入、多输 出系统 (MIMO)
4、室 温控 制系统 5、控制系统的基本组成 ◎被控对象:在自动化领域,被控制的装置、物理系统或过程称为被控对象(室内空气)。 ◎控制装置:对控制对象产生控制作用的装置,也称为控制器、控制元件、调节器等(放大 器)。 ◎执行元件:直接改变被控变量的元件称为执行元件(空调器)。 ◎测量元件:能够将一种物理量检测出来并转化成另一种容易处理和使用的物理量的装置称 数学 模型 传递函数 状态方程 研究 手段 频域法、根轨迹法 状态空间方法 研究 目的 系统综合、校正 最优控制、系统辨识、最优 估计、自适应 控制
合肥学院HEFEI UNIVERSITY 集散控制系统的工程设计 班级: 10 姓名: 学号: 10 指导教师: 完成时间:
集散控制系统的工程设计 现代科学技术领域中,计算机技术和自动化技术被认为是发展较快的两个分支,工业自动化根据生产过程的特点可分为过程控制和制造工业自动化及自动化测量系统。过程控制自动化是以流程工业为对象,流程工业自动化控制一般采用集散控制系统(DCS)。 一、DCS控制系统介绍 集散控制系统(Distributed control system)是以微处理器为基础的对生产过程进行集中监视、操作、管理和分散控制的集中分散控制系统,简称DCS系统。该系统将若干台微机分散应用于过程控制,全部信息通过通信网络由上位管理计算机监控,实现最优化控制,整个装置继承了常规仪表分散控制和计算机集中控制的优点,克服了常规仪表功能单一,人机联系差以及单台微型计算机控制系统危险性高度集中的缺点,既实现了在管理、操作和显示三方面集中,又实现了在功能、负荷和危险性三方面的分散。DCS系统在现代化生产过程控制中起着重要的作用。 DCS的工程设计主要有12项内容,按先后顺序排列如下:方案论证,DCS 评估,DCS询价,技术谈判,合同签订,开工会议,系统设计,组态编程,安装调试,现场投运,整理文件,工程验收。 1.1集散控制系统的组成 1、现场控制级 又称数据采集装置,主要是将过程非控变量进行数据采集和预处理,而且对实时数据进一步加工处理,供CRT操作站显示和打印,从而实现开环监视,并将采集到的数据传输到监控计算机。输出装置在有上位机的情况下,能以开关量或者模拟量信号的方式,向终端元件输出计算机控制命令。 在DCS系统中,这一级别的功能就是服从上位机发来的命令,同时向上位机反馈执行的情况。至于它与上位机交流,就是通过模拟信号或者现场总线的数字信号。由于模拟信号在传递的过程或多或少存在一些失真或者受到干扰,所以目前流行的是通过现场总线来进行DCS信号的传递。
模块一集散控制系统必备知识 【任务目标】 1、通过与模拟控制系统比较,认识计算机控制系统及其组成。 2、了解计算机控制系统的应用类型、发展史。 3、了解计算机通信网络的概念和通信协议。 4、掌握集散控制系统的硬件结构。 5、了解集散控制系统的软件体系。 6、提高查阅资料和信息处理的能力、交流表达能力及团队合作能力。 【任务内容】 阅读能力训练环节 任务内容:了解本课程的性质、内容、任务及学习方法,对目前市场上所常用的计算机控制系统的使用情况进行了解和比较,掌握计算机控制系统的组成原理、信号处理原理;了解计算机通信基本知识,掌握通信网络基础知识及网络控制方法,了解集散控制系统的设计思想及其发展过程,掌握集散控制系统的基本概念、体系结构及各层次的主要功能,了解集散控制系统的软件体系,了解集散系统的组态软件。具体要求如下: 一、一般了解(表面了解) 1、会说目前市场上所常用的计算机控制系统的组成、类型及应用? 2、会讲集散控制系统的设计思想及其发展过程?(背景、发展) 3、会说市场上常见的应用数据通信的例子。 4、会说常见通信网络的拓扑结构。 5、会讲集散控制系统是什么?(定义、特点、应用场合) 6、会说市场上起主导地位的集散控制系统有哪些?(品牌、分类、系列、型号、图片) 7、能说出三种以上市场上常用DCS的性价比。 8、能说出三种以上常用的集散控制系统的组态软件。 二、核心理解(内在理解) 1、能表述计算机控制系统的组成原理、信号处理原理。(结构、原理、特点)。 2、能正确表述集散控制系统的基本概念、体系结构及各层次的主要功能。 3、能够识别现有实训装置中集散控制系统的各个组成部分及相互联系。 三、根据上述要求,独立咨询相关信息,通过收集、整理、提炼完成表1-2~表1-5的填写训练,重点研究表1-3的相关内容,填写结果的参考评分标准见表1-7。 四、配分:本项目工时180分钟,满分为100分,比重70%。 综合能力训练环节 以小组为单位,总结上面任务的实施经验,并回答教师提出的问题。回答问题要求包含以下要素: 1)小组成员。 2)各成员的身份(以分工不同划分)。 3)经验总结报告主题及内涵。 4)小组共性经验(共性优点,共性缺点)。 5)小组个性经验(个性优点,个性缺点)。 6)存在的问题。 7)将如何改进或解决存在的问题。 8)给同学的建议。 9)回答核心问题: 10)回答限时:每小组5分钟,共60分钟。 11)配分:本项目工时90分钟,本项目满分100分,比重30%。
第2章集散型控制系统(DCS)的导论 2.1 什么是集散型控制系统?它的主要特点是什么? 答:集散控制系统又称为分布式控制系统,是计算机技术(computer)、通信技术(communication)、图形显示技术(CRT)、控制技术(control)(简称4C技术)的 发展产物,它是一个通过通信网络将现场控制站、操作员站、工程师站联系起来,共同完成分级控制、集中管理的综合控制系统。 它的主要特点是:①可靠性高②灵活的扩展性③完善的自主控制性④完善的通 信网络。 2.2 集散型控制系统的设计思想是什么? 答:集散控制系统的设计思想是:危险分散、控制功能分散,而操作和管理集中。 2.3 集散型控制系统一般由哪几部分组成?各自主要功能是什么? 答:集散控制系统一般由过程控制单元、数据采集器、CRT显示操作站、管理计算机以及高速数据通路五部分组成。 过程控制单元:实现对DCS的一个或多个回路的较复杂闭环控制。 数据采集器:针对生产过程中非控制变量而言,实现数据采集、预处理以及实时数 据的进一步加工,供CRT操作站显示和打印,实现开环监视。 CRT显示操作站:它是DCS与外界联系的人机接口,具有显示控制过程中各种信 息、监视操作、输出报表,还对DCS的PCU和PIU进行组态,实 现系统的操作和管理。 高速数据通路:它将过程控制单元、操作站、管理计算机等设备连接成一个完整的 DCS,以一定速率在各单元之间完成数据、指令及其它信息的传输, 一般设置成冗余结构。
管理计算机:综合监视DCS的单元,管理DCS的所有信息,具有进行大型复杂运 算的能力以及多输入、多输出控制功能,以实现系统的最优控制和全 厂的优化管理。 2.4 什么是计算机网络?集散型控制系统的通信网络常采用什么类型的网络形式? 答:凡是将地理位置不同而且具有独立功能的各个计算机系统通过通信设备和线路将它们连接起来,由功能完善的网络软件(网络协议、信息交换方式、控制程序和网络 操作系统)实现网络资源(硬件、软件、信息)共享。集散控制系统常用总线网和 环形总线网络。 2.5 什么是通信网络协议?常用的通信网络协议有哪几种? 答:由网络全体“成员”共同遵守的一套“约定”,以实现彼此通信和共享资源,这就是网络协议。常见的网络协议有: 开放系统互连参考模型OSI;IEEE802标准局域网标准;MAP制造业自动化通信 协议;PROWAY过程数据高速公路。 2.6 试分别画出数字量:(1)65H和(2)BAH的不归零、归零及差分曼彻斯特编码的信号 波形图。 答:65H转换为二进制是:01100101B BAH转换为二进制是:10111010B
《集散控制系统》课程标准 学分:2 学时:36 适用专业及专业代码:生产过程自动化技术专业080602 执笔人: 审核人: 1、课程性质与作用 1.1 课程性质 《集散控制系统》课程是生产过程自动化技术专业的一门专业课,也是自动化类专业的主要专业课,工程应用性与操作性较强。课程内容整合、序化为教学过程以模拟现场教学和企业教学为主,以培养技术应用性人才知识能力素质和职业素养为目标,实现了“工学结合”理念。 1.2 课程作用 通过本课程的学习,使学生掌握常用计算机控制技术的体系结构、基本功能、软件组态、系统调试、操作、维护等方面的知识和基本技能,使学生先修课程过程检测仪表、过程控制仪表、过程控制技术等知识在本课程中得到了综合应用;通过学习不仅使学生掌握了专业岗位技能知识,而且培养了学生良好的职业素质和修养,为学生毕业后能胜任过程控制自动化技术专业技术岗位工作打下坚实基础。 1.3 前导课程 《过程检测仪表》、《过程控制仪表》、《过程控制技术》 1.4 后续课程 毕业设计、顶岗实习 2、教学目标与教学方法 2.1 教学目标 通过本课程的几个典型的计算机控制项目的学习和实践,以项目实施过程为导向,使学生不仅仅掌握计算机控制系统的概念、设计思想及特点、发展概况、层次化体系结构和过程控制级的硬件结构及软件组态。更重要的是使学生在做中
学、学中做,逐渐提高学生利用已掌握的计算机控制系统知识去解决控制工程项目的问题。 2.1.1 专业能力目标 能识读控制系统施工图; 能识读并绘制控制流程图; 初步具备集散控制系统硬件配置和安装技术能力; 能熟悉绘制集散控制系统流程图和制作简单报表; 能熟练使用具备组态软件对集散控制系统进行系统组态、回路组态等; 能用其他组态方法进行简单控制方案的设计; 能熟练对集散控制系统进行监控和调试; 能运用所掌握的知识和技术分析集散控制系统的应用案例; 能够遵守操作规范,使用相关技术资料; 能够按规定使用工具、设备,遵守劳动安全、环保的规章制度; 能够用资料说明、核查、评价自身的工作成果; 能够分析故障原因,并做出解释,并提出合理化建议。 2.1.2 社会能力目标 具有团队意识和相互协作精神; 具有较强的沟通能力,人际交往能力; 注重事故保护和工作安全; 遵守职业道德; 语言表达能力。 2.1.3 方法能力目标 在完成工作任务中培养学生获取新知识的方法,为学生的后续独立学习新知识、新技术打好基础; 培养学生具有解决实际问题的思路; 能独立制定工作计划并进行实施; 能够查找中英文资料与文献已取得有用的知识,不断提升自己的能力;2.2 教学方法 宏观:项目化教学法 微观:做中学、问题引导、讲授、互动讨论