南京化工职业技术学院 毕业论文设计 题目: PLC控制皮带运输机的设计 姓名: 所在系部: 班级名称: 学号: 指导老师: 2013年 2 月25日
目录 摘要 ................................................................... III 第1章 PLC概述.. (1) 1.1 PLC的发展 (1) 1.2 PLC的定义 (1) 1.3 PLC的特点 (1) 1.3.1高可靠性 (2) 1.3.2应用灵活、使用方便 (2) 1.3.3控制过程的编程语言简单 (2) 1.4 PLC组成 (3) 1.5 PLC的工作原理 (4) 1.6 PLC的分类 (5) 1.6.1小型PLC (5) 1.6.2中型PLC (5) 1.6.3大型PLC (5) 1.7 PLC的主要技术指标 (5) 1.8 PLC控制系统设计的基本内容及原则 (6) 1.8.1 PLC控制系统设计的基本内容 (6) 1.8.2在设计PLC控制系统时.应遵循以下基本原则 (7) 第2章皮带传输机集中控制系统的结构及工作过程 (8) 1.1皮带传输机的结构 (8) 1.2 皮带运输机的电气控制要求 (9) 1.3 皮带运输机的总体方案确定 (9) 第3章控制系统的硬件电路设计 (11) 3.1 PLC选型 (11) 3.1.1信号的确定 (11) 3.1.2 PLC型号确定 (11) 3.2 I/O点分配 (13) 3.3 PLC外围硬件电路的设计与硬件电路图 (13)
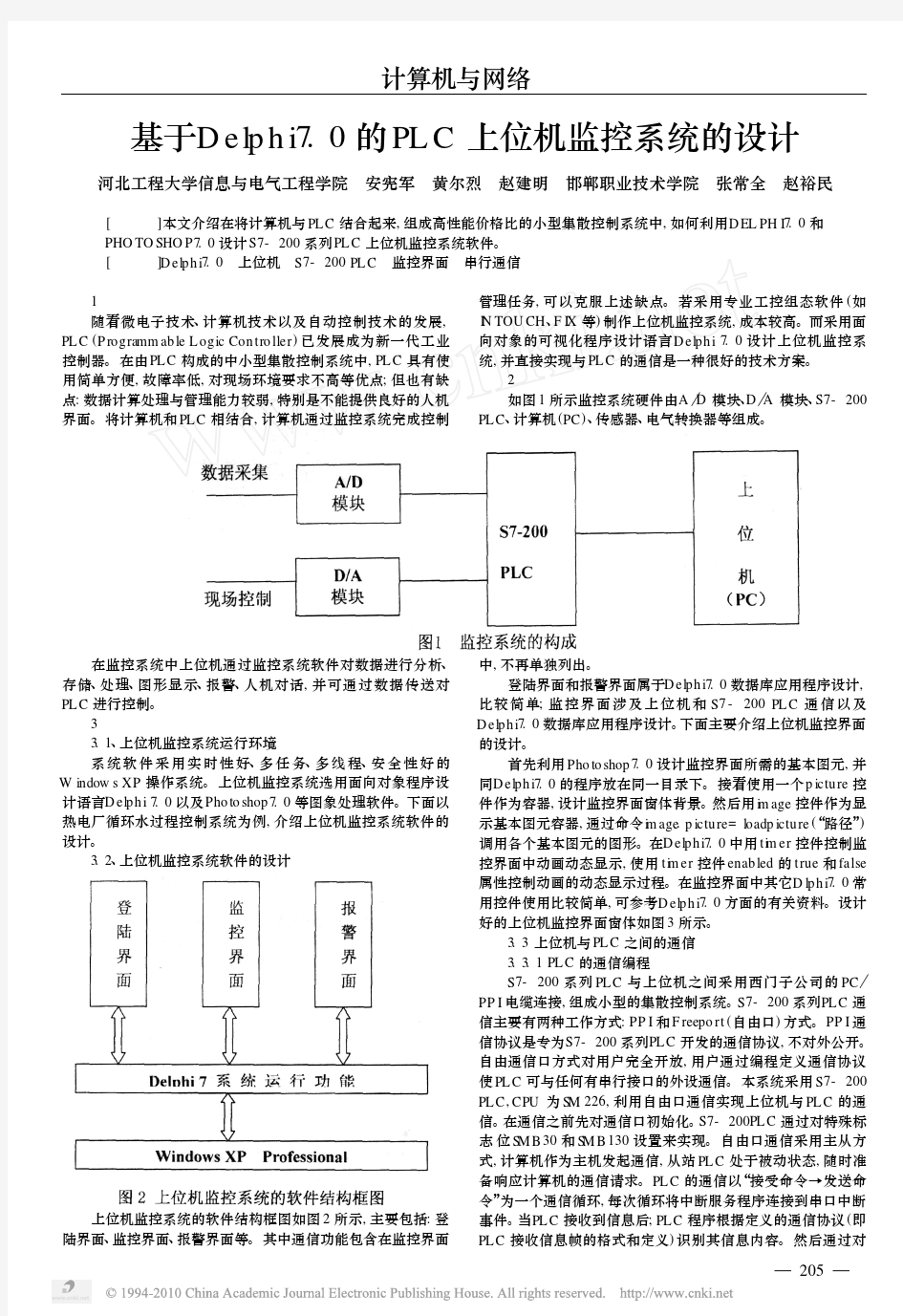
3.3.1 PLC外围硬件电路图 (13) 3.3.2硬件电路主电路图及说明 (14) 3.4硬件电路的接线要求 (15) 第4章控制系统的软件设计 (16) 3.1软件设计思路 (16) 3.2程序流程图与梯形图及说明 (16) 第5章抗干扰的设计 (19) 4.1设备选型 (19) 4.2 综合抗干扰设计 (19) 第5章系统调试 (20) 总结 (21) 致谢 (22) 参考文献 (23)
附件1 起重机械安全监控管理系统的项目、 内容、方法和要求(试行) 1、设计文件 检查起重机械设计文件中有关安全监控管理系统的内容是否符合《起重机械 安全监控管理系统》(GB/T 28264-2012)的要求。 2、安全监控管理功能要求的硬件配备 检查起重机械的出厂配套件清单中是否有GB/T 28264-2012所要求的信号采集单元、信号处理单元、控制输出单元、数据存储单元、信号显示单元、信息导出接口单元等硬件设施,并核查。 3、管理权限的设定 现场核实系统管理员的授权,进入系统后,需要有登录密码或更高级的身份识别方式。系统管理员输入正确的密码或其它识别方式后,能够顺利进入系统。 4、故障自诊断 开机进入系统后,现场核实系统有运行自检的程序,并显示自检结果,系统应具有故障自诊断功能。系统自身发生故障而影响正常使用时,能立即发出报警信号。 5、报警装置 在空载的条件下,通过按急停或系统设计的报警信号现场验证起重机械的各种报警装置的动作。 系统的报警装置能向起重机械操作者和处于危险区域的人员发出清晰的声光报警信号。
当发生故障时,系统不但要报警,还应能根据设置要求对设备止停。 6、文字表达形式 现场目测系统显示的所有界面的文字表达形式为简体中文。 7、通信协议的开放性 (1)现场检查系统有对外开放的硬件接口,查阅相关说明书中通信协议的内容,应符合国家现行标准规定的MODBUS、TCP/IP、串口等对外开放的协议; (2)现场验证系统通过以太网或USB接口能方便地将记录数据导出。 8、显示信息的清晰度 在司机座位上,斜视45°可清晰完整的观察到整个监控画面,包括视频系统的画面,画面上显示的信息不刺目、不干扰视线,清晰可辨。 9、系统信息采集源 对应GB/T 28264-2012中表1检查信息采集源。 10、监控参数验证 按照下述方法,对应GB/T 28264-2012中表2验证具体产品的参数。 (1)起重量 现场起升载荷,检查显示器上是否显示起重量,显示计量单位为“t”,并至少保留小数点后两位。 (2)起重力矩 现场起升载荷,并进行变幅运动,检查显示器上是否显示起重量和相应位置幅度,显示计量单位分别为“t”和“m”,均应至少保留小数点后两位。 — 2 —
目录 摘要 .................................................................. 错误!未定义书签。 一、课设要求 (2) 二、设计目的 (2) 三、设计方案思路 (2) 四、PLC编程的I/O编址及I/O端子接线图 (3) (一)I/O编址 (3) (二)I/O端子接线图 (3) 五、PLC编程及调试 (3) (一)系统流程图 (3) (二)程序设计 (5) (三)、皮带传输控制原理 (8) 六、课程设计小结 (10) 七、参考文献 (11)
皮带运输机传输系统梯形图控制程序设计与调试 摘要:皮带机是皮带输送机的简称,皮带机运用输送带的连续或间歇运动来输送各种轻重不同的物品,既可输送各种散料,也可输送各种纸箱、包装袋等单件重量不大的件货,用途广泛。它的控制形式也多种多样,它可以由单片机,PLC,以及计算机来控制,由于PLC为主构成的控制系统具有可靠性高、控制功能强大、性价比高等优点,是目前工业自动的首选控制装置,故本设计中采用PLC集中控制的办法。此次设计内容中利用PLC编程来实现皮带运输机的启动和停止要求,同时对运行过程中出现故障的调试。 关键词:皮带运输机; PLC ;故障调试
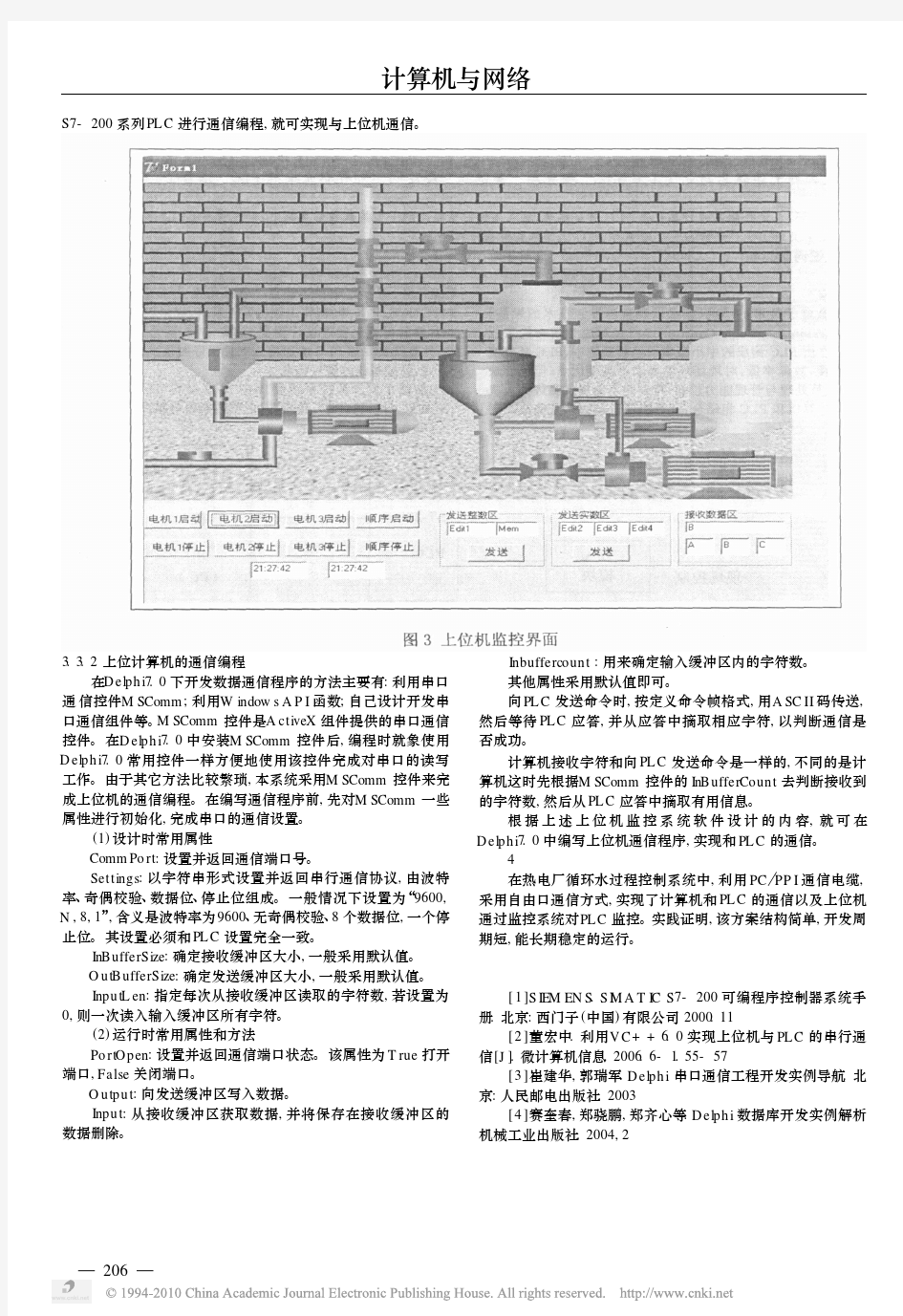
皮带运输机传输系统梯形图控制程序设计与调试 一、课设要求 1. 控制要求: (1)皮带运输机传输系统由四台电动机M1,M2,M3,M4带动 起动时 M4→M3→M2→M1 (分别间隔5s) 停止时 M1→M2→M3→M4 (分别间隔5s) (2)当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而其后的皮带机则待料运完后才停止。例如:M2出故障,M2和M1立即停止,经5s 延时后,M3停,再经过5s,M4停 (3)设置故障调试开关 2. I/O编址 3. 编程并调试 4. I/O端子接线图 二、设计目的 1、熟悉步进顺空指令的编程方法; 2、掌握选择性流程的编制 3、掌握皮带运输机的程序设计及I/O端子接线图 三、设计方案思路 1、设计启动电路控制程序 2、设计停止电路控制程序 3、设计故障调试电路控制程序
西南科技大学城市学院 City College of Southwest University Of Science and Technology 课程设计论文(设计)论文题目:二级减速器设计 指导教师:王忠 系别:机电工程系 专业班级:机械设计制造及其自动化1004 姓名:张乐天 学号:201040255 日期:2012年7月 摘要 齿轮传动是现代机械中应用最广的一种传动形式。它由齿轮、
轴、轴承及箱体组成的齿轮减速器,用于原动机和工作机或执行机构之间,起匹配转速和传递转矩的作用。齿轮减速器的特点是效率高、寿命长、维护简便,因而应用极为广泛。 本设计讲述了带式运输机的传动装置——二级圆柱齿轮减速器的设计过程。首先进行了传动方案的评述,选择齿轮减速器作为传动装置,然后进行减速器的设计计算(包括选择电动机、设计齿轮传动、轴的结构设计、选择并验算滚动轴承、选择并验算联轴器、校核平键联接、选择齿轮传动和轴承的润滑方式九部分内容)。运用AutoCAD软件进行齿轮减速器的二维平面设计,完成齿轮减速器的二维平面零件图和装配图的绘制。 关键词:齿轮啮合轴传动传动比传动效率 目录
一、设计任务书 (4) 二、动力机的选择 (5) 三、计算传动装置的运动和动力参数 (6) 四、传动件设计计算(齿轮) (7) 五、轴的设计.......... .......... .......... ........... .. .. . (16) 六、滚动轴承的计算 (23) 七、连结的选择和计算 (25) 八、润滑方式、润滑油牌号及密封装置的选择 (26) 九、箱体及其附件的结构设计 (26) 十、设计总结 (27) 十一、参考资料 (28)
起重机安全监控管理系统 一、内容 二、说明 1、设计文件 符合《起重机械安全监控管理系统》(GB/T 28264-2012)的要求。
2、安全监控管理功能要求的硬件配备 符合GB/T 28264-2012所要求的信号采集单元、信号处理单元、控制输出单元、数据存储单元、信号显示单元、信息导出接口单元等硬件设施。 3、管理权限的设定 系统管理员的授权,进入系统后,需要有登录密码或更高级的身份识别方式。系统管理员输入正确的密码或其它识别方式后,能够顺利进入系统。 4、故障自诊断 开机进入系统后,系统有运行自检的程序,并显示自检结果,系统具有故障自诊断功能。系统自身发生故障而影响正常使用时,能立即发出报警信号。 5、报警装置 系统的报警装置能向起重机械操作者和处于危险区域的人员发 出清晰的声光报警信号。 当发生故障时,系统不但要报警,还能根据设置要求对设备止停。 6、文字表达形式 现场目测系统显示的所有界面的文字表达形式为简体中文。 7、通信协议的开放性 (1)系统有对外开放的硬件接口,通信协议的内容,应符合国家现行标准规定的MODBUS、TCP/IP、串口等对外开放的协议; (2)系统通过以太网或USB接口能方便地将记录数据导出。 8、显示信息的清晰度 在司机座位上,斜视45°可清晰完整的观察到整个监控画面,包括视频系统的画面,画面上显示的信息不刺目、不干扰视线,清晰可辨。 9、系统信息采集源
对应GB/T 28264-2012中表1信息采集源。 10、监控参数 (1)起重量 起升载荷,显示器上显示起重量,显示计量单位为“t”,至少保留小数点后两位。 (2)起重力矩 起升载荷,并进行变幅运动,显示器上显示起重量和相应位置幅度,显示计量单位分别为“t”和“m”,至少保留小数点后两位。 (3)起升高度/下降深度 显示屏上,能实时显示所吊运的物体高度和下降深度。 (4) 运行行程 起重机械的起升高度、下降深度、小车运行、大车运行等运行行程可实时显示。 (5) 风速 系统实时显示风速值,记录当前风速值。在司机室和起重机周围能清晰的观察到声光报警信号,当报警动作后,起重机停止运行。 (6)回转角度 系统实时记录并显示起重机械的回转角度。 (7)幅度 现场进行变幅运动,显示器上显示相应位置幅度,显示计量单位为“m”,保留小数点后两位。 (8)大车运行偏斜 大车运行偏斜达到设定值时,系统显示并能发出报警信号。 (9)水平度 系统中有实时显示整体水平度的数值并记录。 (10)同一或不同一轨道运行机构安全距离
目录 摘要 (1) 一、课设要求 (2) 二、设计目的 (2) 三、设计方案思路 (2) 四、PLC编程的I/O编址及I/O端子接线图 (3) (一)I/O编址 (3) (二)I/O端子接线图 (3) 五、PLC编程及调试 (3) (一)系统流程图 (3) (二)程序设计 (5) (三)、皮带传输控制原理 (8) 六、课程设计小结 (10) 七、参考文献 (11)
皮带运输机传输系统梯形图控制程序设计与调试 摘要:皮带机是皮带输送机的简称,皮带机运用输送带的连续或间歇运动来输送各种轻重不同的物品,既可输送各种散料,也可输送各种纸箱、包装袋等单件重量不大的件货,用途广泛。它的控制形式也多种多样,它可以由单片机,PLC,以及计算机来控制,由于PLC为主构成的控制系统具有可靠性高、控制功能强大、性价比高等优点,是目前工业自动的首选控制装置,故本设计中采用PLC集中控制的办法。此次设计容中利用PLC编程来实现皮带运输机的启动和停止要求,同时对运行过程中出现故障的调试。 关键词:皮带运输机; PLC ;故障调试
皮带运输机传输系统梯形图控制程序设计与调试 一、课设要求 1. 控制要求: (1)皮带运输机传输系统由四台电动机M1,M2,M3,M4带动 起动时 M4→M3→M2→M1 (分别间隔5s) 停止时 M1→M2→M3→M4 (分别间隔5s) (2)当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而其后的皮带机则待料运完后才停止。例如:M2出故障,M2和M1立即停止,经5s 延时后,M3停,再经过5s,M4停 (3)设置故障调试开关 2. I/O编址 3. 编程并调试 4. I/O端子接线图 二、设计目的 1、熟悉步进顺空指令的编程方法; 2、掌握选择性流程的编制 3、掌握皮带运输机的程序设计及I/O端子接线图 三、设计方案思路 1、设计启动电路控制程序 2、设计停止电路控制程序 3、设计故障调试电路控制程序
河北联合大学轻工学院 QINGGONG COLLEGE, HEBEI UNITED UNIVERSITY 机械设计课程设计课程设计 计算说明书 设计题目带式运输机传动装置
目录 一、设计任务书 (4) 二、减速器总体方案设计 (5) 2.1传动方案的拟定 (5) 2.2电动机的选择 (5) (1)电动机类型的选择 (5) (2)电动机功率的选择 (5) (3)电动机转速的选择 (5) (4)确定电动机型号 (5) 2.3传动比的分配 (6) 2.4运动参数及动力参数计算 (6) 三、V带传动的设计 (8) 3.1确定设计计算功率P d (8) 3.2选择带的型号 (8) 3.3确定带轮基准直径d d1、d d2 (8) (1)选择小带轮的基准直径d d1 (8) (2)验算带速 (8) (3)计算大带轮基准直径d d2 (8) (4)确定中心矩a及带的基准长度L d0 (9) (5)验算小带轮包角 1 (9) (6)确定V带的根数 (9) (7)确定带的初拉力F0 (10)
(10)计算带的轴压力F Q (10) 四、齿轮的设计计算及结构说明 (10) 4.1选择齿轮材料 (10) 4.2计算齿面接触疲劳强度 (10) 4.3确定齿轮的主要参数和计算几何尺寸 (11) 4.4校核齿根弯曲疲劳强度 (12) 4.5计算齿轮的圆周速度及确定精度等级 (12) 五、轴的设计计算及校 (13) 5.1输入轴的设计计算与校核 (13) (1)根据工作要求选择材料 (13) (2)按扭矩初算轴的最小直径 (13) (3)轴的结构设计 (13) (4)轴的强度校核 (15) 5.2输出轴的设计计算与校核 (19) (1) 根据工作要求选择材料 (19) (2)按扭矩粗算的最小直径 (19) (3)轴的结构设计 (20) (4)轴的强度校核 (21) 六、滚动轴承的校核 (26) 6.1 输入轴滚动轴承寿命校核 (26) 6.2输出轴滚动轴承寿命校核 (27) 七、键的选择与校核 (28)
起重机安全监控管理系统应用及开发分析 摘要:文章主要针对起重机安全监控管理系统应用展开研究,分别从以下几个方面详细分析,目的是凸显起重机安全监控管理系统优势,深入开发应用。 关键词:起重机;安全监控管理系统;PLC系统 在起重机上安装系列传感器、监控仪表形成安全监控管理系统对保障起重机安全?\行具有重要意义。对于大型起重机,由于其起重量大、跨度大、结构复杂、使用环境苛刻、事故危害更大等原因,其安全性更加引起使用和监管部门的关注,故大型起重机安装安全监控管理系统更加显得重要。 1.起重机安全监控管理系统的组成结构 该系统主要由外围元器件、信息采集模块、监控仪、视频监控系统等组成。通过外围元器件采集到起重机各个位置的模拟信号,并汇总到控制器,转换后的数字信号经传输到监控仪进行处理、存储、显示【1】。视频监控系统是相对独立的,主要由摄像机、硬盘录像机等实现。在信号采集、监控布线实施过程中,数据监控系统与视频监控系统相互独立。现场采集信号主要有模拟量、开关量以及视频信号等。数据监控主要是模拟量和开关量,采用各类传感器进行采集以及相应的监控记录仪实现监控。而对于视频监控需求则采
用视频监控器进行监控。模拟量的信号采集方式是对设备运行过程的线性情况的采集;开关量的信号采集方式是对现场设备运行状态的一种点情况采集。模拟量信号主要来源于起重量传感器、起重机纵移传感器、起升高度传感器、水平倾角传感器、风速仪、转速传感器等。开关量信号主要来源于操作指令状态、门限位、联锁报警、电缆卷筒限位、电缆卷筒过松过紧、行程限位、起升制动器状态、抗风防滑状态等。 2.起重机安全监控管理系统主要功能 (1)系统监控功能。起重机安全监控管理系统具有可扩展接口,能够实现起重机操作人员、现场办公室、远程管理者等3种不同层次的监控管理需求。 (2)用户管理功能。起重机安全监控管理可以预设若干用户名的使用权限,只有输入正确的用户名和密码后可进入系统,进行系统的设定、报警查阅及文档输出等。 (3)系统控制输出和报警功能。门式起重机起动前系统将对其进行自检,如果出现影响门式起重机安全运行的情况时,系统通过警示提示司机谨慎操作;当门式起重机某部位出现故障时,系统通过警示提示司机,同时控制模块输出信号接人电控系统,使相应的机构停止运行或断电,待故障排除后系统恢复正常后,门式起重机才能正常运行【2】。 (4)系统信息的存储和调取功能。起重机安全监控管理系统以图形、图像、图标和文字的方式实时显示起重机械
皮带运输机电气控制系统设计
任务书 姓名:专业: 设计课题:皮带运输机电气控制系统设计 设计条件及要求: 设计条件:(1)起动:起动时为了避免在前段运输皮带上造成物料堆积,要求逆物料流动方向按一定时间间隔顺序起动。其起动顺序 为: (2)停止:停止时为了使运输皮带上不残留物料,要求顺物料流动方向按一定时间间隔顺序停止。其停止顺序为: (3)紧急停止:紧急情况下无条件地把PD-1、PD-2、YV全部同时停止。 (4)故障停止:运转中,当M1过载时,应使PD-1、PD-2、YV 同时停止。当M2过载时,应使PD-2、YV同时停止;PD—1在PD-2停止后延迟10s后停止。 (5)M1和M2电机功率都是5.5KW。 设计要求: 1、掌握继电接触器控制系统基本分析和设计能力;2、掌握可编程控制器的工作原理及结构特点;3、熟练掌握基本逻辑指令的应用;4、绘制系统的主电路图、继电接触器控制线路图(一张); 5、编写设计说明书(一份)。 设计时间:自20**年**月**日至20**年**月**日 设计指导人(签字):_________________________ 教研室主任(签字):_________________________ 年月日
前言 (4) 一、机床电气控制技术课程设计的目的 (5) 二、设计的内容与步骤 (5) (一)设计的基本原则 (5) (二)设计的内容 (6) 三、系统传动方式的确定 (6) (1)往复运动工作机构传动方式的确定 (7) (2)传动方式的选择应使调速性质与负载特性相适 (8) (3)电动机起动方式的确定 (8) (4)电气系统的保护 (8) 四电气控制方案的确定 (13) (一)电气逻辑控制装置的选择 (13) (二)控制方式的选择 (14) (三)系统动作要求 (15) (四)确定I/O点数及PLC的选型 (16) 设计总结 (25) 感谢信 (26) 参考文献 (27)
课程设计报告 二级展开式圆柱齿轮减速器 姓名: 学院:物理与机电工程学院 系别:机电工程系 专业:机械设计制造及其自动化年级:2003 学号:03150117 指导教师:冯永健 2006年6月29日
一.设计题目 设计一用于卷扬机传动装置中的两级圆柱齿轮减速器。轻微震动,单向运转,在室内常温下长期连续工作。卷筒直径D=500mm,运输带的有效拉力F=10000N, 卷筒效率 5 η=0.96,运输带速度0.3/v m s =,电源380V ,三相交流. 二.传动装置总体设计: 1. 组成:传动装置由电机、减速器、工作机组成。 2. 特点:齿轮相对于轴承不对称分布,故沿轴向载荷分布不均匀,要求轴有较大的刚度。 3. 确定传动方案:考虑到电机转速高,传动功率大,将V 带设置在高速级。 其传动方案如下: 三.选择电动机 1.选择电动机类型: 按工作要求和条件,选用三相笼型异步电动机,封闭型结果,电压380V ,Y 型。 2.选择电动机的容量 电动机所需的功率为: W d a P P = η KW 1000 W FV P = KW 所以 1000d a FV P = η KW 由电动机到运输带的传动总功率为 1a 422345 η=η?η?η?η?η
1 η—带传动效率:0.96 2η—每对轴承的传动效率:0.99 3η—圆柱齿轮的传动效率:0.96 4 η—联轴器的传动效率:0.99 5 η—卷筒的传动效率:0.96 则:4210.960.990.960.990.960.79a 422345η=η?η?η?η?η=????= 所以 94650.3 3.8100010000.81d a FV p η= ?==?KW 3.确定电动机转速 卷筒的工作转速为 601000 6010000.3 11.46 500V n D ???= = =∏∏?r/min 查指导书第7页表1:取V 带传动的传动比2i =~4带;二级圆柱齿轮减速器传动比840i =~减速器,所以总传动比合理范围为16160i =~总,故电动机转速的可选范围是: n n i =?=(16~160)?11.46=183~1834总 卷筒电机r/min 符合这一范围的同步转速有750、1000和1500r/min 。 根据容量和转速,由有关手册查出有三种适用的电动机型号,因此有四种传动比方案如下: 方案 电动机型号 额定功率 KW 同步转速 r/min 额定转速 r/min 重量 N 总传动比 1 Y112M- 2 4 1500 1440 470 125.65 2 Y132M1-6 4 1000 960 730 83.77 3 Y160M1-8 4 750 720 1180 62.83 综合考虑电动机和传动装置的尺寸、重量和带传动、减速器的传动比,可见第二方案比较适合。因此选定电动机型号为Y132M1-6,其主要参数如下;
起重机械在线安全监控及预警系统
——每一次安全的装卸都有我们默默的保驾护航
On-line System of Safety & Health Monitoring & Warning for Cranes
江西飞尚科技有限公司
JIANGXI FASHION TECHNOLOGY CO., LTD
一、监测的缘由 监测的缘由
二、监测的意义
三、监测的内容和目的
结合国家和行业政策,对起重机械的工作环境、关键部位应力应变、变形(挠度) 、结构稳 定性、姿态控制、运行区域等进行 24 小时在线监测。发现异常状况及时报警,并将异常信 息及时传达给相应的管理或者技术人员,防止起重机械发生倾覆、失稳、疲劳损伤甚至断裂 等造成重大事故和经济损失。 从而对起重机械的安全状况、健康程度、疲劳损伤、寿命预测等进行诊断和预警,并做 到基于状态的维修和更换,保证起重机械的安全可靠和经济性。
四、监测的对象
监测类型包括港口起重机、公路铁路架桥机、造船门机、建筑塔机、流动式起重机等。
五、监测的项目
监测项目有可选和建议测试项目,也可以针对具体用户定制监测项目。 No. 监控内容 项目 仪器 型号 FS-T-DZ120 温度 温度传感器 1 工作环境 FS-FS-jx 风速 风速仪 挠度 2 3 4 5 结构稳定性 倾斜度 应力 (应变) 应力应变 姿态监测 角度,距离 缆绳力监测 力 测斜仪 应变计 高精度电子罗盘 磁通量传感器 FS-HGC01 FS-BM30 FS-LP01 FS-BCT18J-25 可选 可选 挠度仪 FS-ND-50 备注
目录 第1章控制对象概述 (1) 1.1 皮带运输机用途、基本组成结构及工作过程 (1) 1.1.1 皮带运输机用途 (1) 1.1.2 皮带运输机组成及工作原理 (1) 1.2 控制对象对控制系统的要求 (1) 1.3 本课题应完成的设计工作 (2) 第2章控制方案论证 (3) 2.1 继电器控制方案 (3) 2.2 单片机控制方案 (3) 2.3 PLC控制方案 (4) 2.4 结论 (4) 第3章控制系统硬件设计 (5) 3.1 电机及元件选择 (5) 3.2 电路设计 (5) 3.2.1 主电路设计 (5) 3.2.2 PLC I/O 接线图设计 (6) 第4章控制系统程序设计 (7) 4.1 程序组成部分 (7) 4.2 主程序 (7) 4.3 公用子程序 (8) 4.4 手动公用子程序 (8) 4.5 自动公用子程序 (9) 4.6 M1电机故障子程序 (10) 4.7 M2电机故障子程序 (11) 4.8 M3电机故障子程序 (12) 4.9 M4电机故障子程序 (12) 第5章程序调试 (13) 第6章体会心得 (14) 附录 (15) 参考资料 (18)
第1章控制对象概述 1.1 皮带运输机用途、基本组成结构及工作过程 1.1.1 皮带运输机用途 皮带输送机可以广泛应用于现代化的各种工业企业中,露天采矿场及选矿厂中,在矿山的井下巷道、矿井地面运输系统中,皮带输送机都得到了广泛应用,水平运输或倾斜运输,皮带输送机的使用都非常方便。皮带输送机是以连续摩擦驱动的方式用来运输物料。那么皮带输送机的主要是由输送带和驱动装置组成的。皮带输送机具有输送量大、结构简单优点,它广泛地应用在矿山、冶金、煤炭等部门,用来输送松散物料或成件物品,根据输送工艺要求,可以单台输送,也可多台组成或与其他输送设备组成水平或倾斜的输送系统,以满足不同布置型式的作业线需要。 皮带运输机的驱动装置由单个或多个驱动滚筒驱动,驱动电机也可以是单个电机或多个电机驱动。一般驱动装置包括电动机、减速机、液力偶合器、制动器或逆止器等组成。偶合器的作用是改善皮带运输机的启动性能。制动器和逆止器是为了防止当皮带运输机停机时皮带向下滑动。 皮带运输机是散料连续运输机械,是应用于短距离连续运输的的重要机械设备。 1.1.2 皮带运输机组成及工作原理 皮带输送机的主要是由输送带和驱动装置组成的。主要介绍驱动装置即四台电动机的运动情况。皮带运输机由4台皮带机组成,4台皮带机分别用4台电动机(M1~M4)拖动。皮带输送机是以连续摩擦驱动的方式用来运输物料,通过控制4台电动机的运动,来控制传输物料。 1.2 控制对象对控制系统的要求 皮带运输机由4台皮带机组成,4台皮带机分别用4台电动机(M1~M4)拖动,如图1所示。
XXXX职业技术学院 学生毕业设计(毕业论文) 系别:机电工程学院 专业:机电一体化 班级:机电XXX 学生姓名: 学生学号: 设计(论文)题目:皮带运输机电器控制系统设计 指导教师: 设计地点: XXXX职业技术学院 起迄日期: 2013.09.08-2013.11.12
专业机电一体化班级机电姓名 XXX 一、课题名称:皮带运输机电器控制系统设计 二、主要技术指标: 1.延时开关延时时间为5s,使皮带运输机能够按间隔5s时间相继运行,间隔5s相继停止 2.三菱FX2N PLC程序的设计,使皮带运输机能够自动循环的运行 3.电路及电路保护的设计,使皮带运输机能够防止短路、过载等危险,安全运行 三、工作内容和要求: 1.了解市场皮带运输机的优缺点,明确设计方向及要点 2.电路及保护电路的设计 3.PLC程序设计 4.皮带运输机电器系统的原理说明 四、主要参考文献: 1.王成福.可编程序控制器原理及应用[M].北京:北京机械工业出版社,2006 2.李景学.可编程序控制器应用系统设计及方法[M].北京:电子工业出版社,1995 3.陈新华.电工技术与可编程序控制器实践[M].北京:北京机械工业出版社,2002 4.余雷声.电气控制与PLC应用[M].北京:机械工业出版社,2001 5.三菱微型可编程控制器编程手册(手册) 2000年 学生(签名)年月日 指导教师(签名)年月日 教研室主任(签名)年月日 系主任(签名)年月日
设计(论文)题目皮带运输机电器控制系统设计 一、选题的背景和意义: 随着社会的发展、科技的进步,现代的工业生产中常常需要对物料进行加工、搬运,如果这繁杂的工作由人工完成的话不但效率低,而且劳动强度大,不适合现代化的生产需要。因此,皮带运输系统应运而生。它因具备长距离、大批量、高速、高效的有点而被广泛应用于冶金、煤炭、港口、建筑、食品加工等工业中。但是因为皮带运输机控制系统的安全、操作难度等还不够完善,在工业生产中时常发生事故。因此,设计出安全、高效的皮带运输系统以迫在眉睫。它可使企业更高效、更安全的生产、增加效益、减少事故。 二、课题研究的主要内容: 1.皮带运输系统所使用的相关内容和领域 2.三菱FX2N PLC在皮带运输机电器控制系统中的应用 3.电工学在皮带运输机电器控制系统设计中的应用 三、主要研究(设计)方法论述: 1.通过网络、书籍了解皮带运输机控制系统存在的优缺点,明确设计方向 2.查阅电工学书籍,学习电路知识,完成电路图及电路保护的设计 3.学习、借助三菱PLC软件,完成PLC程序的设计 4.后期处理阶段,完成毕业设计工作 四、设计(论文)进度安排: 时间(迄止日期)工作内容 2013.9.8-2013.9.15 确定论文题目,通过网络、资料等了解皮带运输控制系统存在背景、 意义及优缺点 2013.9.16-2013.9.20 通过查找皮带运输机控制系统的相关资料和书籍,完成并且上交开题 报告,模拟初稿 2013.9.21-2013.10.1 通过对皮带运输机控制系统设计的资料的研究,完成绪论部分和第一 章的内容
机械设计课程设计 ---一级圆柱齿轮减速器设计 (带式运输机) 北京市机械局职工大学 目录
一、电动机的选择 --------------------------- 4 二、传动比的分配 -------------------------- 5 三、传动装置各轴的运动和动力参数--------- 5 四、V带的设计与计算 ----------------------- 7 五、齿轮的选择 ---------------------------- 10 六、轴的设计-------------------------------- 13 1、Ⅰ轴的设计(高速轴) ---------------- 13 2、Ⅱ轴的设计(低速轴) ----------------- 19 七、减速箱的设计 ------------------------- 25 八、润滑的选择 --------------------------- 26 参考文献 -------------------------------- 27 机械课程任务书 设计带式运输传动系统 题目要求:传动装置含有圆柱齿轮减速器
原始 1)运输带工作拉力F/N 1200 2)运输带工作速度V/(m·s-1) 3)运输机卷筒直径D/mm 270 传动简图 1、V带运动 2、运动带3一级圆柱齿轮减速器4、联轴器 5、电动机 6、卷筒 工作条件连续单向运转,载荷可能有轻微冲击,空载起动电压380/220V的三相电源。 技术要求使用年限10年,小批量生产,两班制工作,8h/班 设计任务说明书一份,装配图一份 一、电动机的选择 1、确定电动机的类型 按工作要求选择Y系列全封闭直扇冷式笼型三相异步电动机,
目录 内容摘要 0 绪论 0 1控制要求的分析设计思路 (1) 1.1设计方案 (2) 1.2基本原则 (3) 1.3控制要求 (3) 1.4分析控制要求 (4) 1.5PLC的选型 (8) 1.6实训器材 (9) 2输入输出分配 (10) 2.1I/O分配 (10) 2.2外接线图 (10) 3顺序功能图设计 (11) 3.1划分步 (11) 3.2动作确定 (12) 3.3转换条件的确定 (13) 3.4顺序功能图 (14) 3.5步进梯形图 (15) 3.6指令表 (17) 4系统试调 (19) 5产品的发展前景 (19) 参考文献 (21) 致谢辞 (23)
摘要 皮带运输机是一种有牵引件的连续运输设备,主要用在煤炭、冶金、有色金属和水泥等矿山中,车辆的运输成本快速增高。带式输送机越来越显示出它的集约化、自动化、连续化、高速化、简单化、清洁化、环保化、安全化等突出的综合优势。主要用来运送块状、粒状和散状等物料和成件的货物,广泛的应用于工业生产中。传统的皮带运输机调速系统大部分是人工手动或半自动调速的,应用在皮带运输机上的直流电机存在动态性能差、故障率高、维护困难等缺点;本文就是采用PLC和变频器相结合的控制技术来提高生产效率的设计。 本文针对系统的主令控制器、转速传感器和皮带运输机部分进行了阐述,变频器、可编程控制器、三相异步电机部分进行了设计。实现了转速传感器直接检测到皮带运输机的速度,通过信号传输线路传输到主令控制器中。主令控制器接收转速传感器的数据,按照一定的控制规律做出指示,对变频器进行动作,从而使三相异步电动机的转速发生变化的功能。 关键词 PLC 皮带运输机 绪论
机械设计课程设计计算说明书-带式输送机传动装置(含全套图纸)
机械设计课程设计 计算说明书 设计题目:带式输送机 班级: 设计者: 学号: 指导老师: 日期:2011年01月06日
目录 一、题目及总体分析 (1) 二、选择电动机 (2) 三、传动零件的计算 (7) 1)带传动的设计计算 (7) 2)减速箱的设计计算 (10) Ⅰ.高速齿轮的设计计算 (10) Ⅱ.低速齿轮的设计计算 (14) 四、轴、键、轴承的设计计算 (20) Ⅰ.输入轴及其轴承装置、键的设计 (20) Ⅱ.中间轴及其轴承装置、键的设计 (25) Ⅲ.输出轴及其轴承装置、键的设计 (29) 键连接的校核计算 (33) 轴承的校核计算 (35) 五、润滑与密封 (37) 六、箱体结构尺寸 (38) 七、设计总结 (39) 八、参考文献 (39)
一、题目及总体分析 题目:带式输送机传动装置 设计参数: 设计要求: 1).输送机运转方向不变,工作载荷稳定。 2).输送带鼓轮的传动效率取为0.97。 3).工作寿命为8年,每年300个工作日,每日工作16小时。设计内容: 1.装配图1张; 2.零件图3张; 3.设计说明书1份。 说明: 1.带式输送机提升物料:谷物、型砂、碎矿石、煤炭等; 2.输送机运转方向不变,工作载荷稳定; 3.输送带鼓轮的传动效率取为0.97; 4.工作寿命为8年,每年300个工作日,每日工作16小时。
装置分布如图: 1. 选择电动机类型和结构形式 按工作条件和要求选用一般用途的Y 系列三相异步电动机,卧式封闭。 2. 选择电动机的容量 电动机所需的工作效率为: d w d P P η= d P -电动机功率;w P -工作机所需功率; 工作机所需要功率为: w Fv P 1000 = 传动装置的总效率为: 42d 1234ηηηηηη= 按表2-3确定各部分效率: 三 相电压 380V
试题1、设计装调:用PLC 控制一套三级皮带运输机的设计、安装与调试 ? 本题分值:100分 ? 考核时间:180分钟 ? 考核形式:现场操作 ? 考核内容和要求: 1. 电气控制工艺流程 (1)三台拖动电动机M1、M2和M3,为了避免物料在运输途中堆积,实现正常传输,皮带运输机起动时要按一定时间间隔半自动顺序起动: M1??→?秒间隔5M2??→?秒间隔5M3;停车时按一定时间间隔半自动反序停车:M3间隔10秒M2间隔10秒M1。 (2)由现场考评决定:①运行模式可按不同的组配方案,如选择“手动停车/半自动起动/自动循环”;②其中的自动可定为“单周”(或“双周”循环)工作;③三台电机的“全投运行时T1”(从M3起动2秒后至M3停止前的时段),“全停待机时T2”(从M1处于停车2秒后,至M1重新起动前的时段),均由考评现场随机指定,(如模拟运行可取T1=13秒,T2=15秒作为象征运行时间)。 (3)以上各时间间隔和时段、控制方式、运行模式组配方案(手动、半自动、自动、循环等方式),均由考评现场指定,作为参数条件设计依据考生可记录在本人试卷上。 2.电路设计 (1)根据任务,设计“用PLC 控制”的主/控电路图; (2)有短路、过载及必要的联锁保护功能等。 (3)填写〈材料申领单〉; (4)列出PLC 控制I /O (输入/输出)接口地址分配表(或称现场元件信号对照表); (5)绘制PLC 控制I /O 口(输入/输出)接线图; (6)根据工艺要求,设计梯形图; (7)根据梯形图,列出指令表。 3.安装与接线 (1)按主/控电路图及PLC 控制I /O 口(输入/输出)接线图,在机架或模拟配线板上安装与接线。 (2)如在模拟配线板上安装,将熔断器、接触器、PLC 装在主接线板上;将转换开关、按钮等外接器件装在另一块配线板上。 4.PLC 键盘操作 (1)熟练操作键盘; (2)能正确地将所编程序输人PLC ; (3)按照被控设备的动作要求模拟调试,达到设计要求。 5.联机试验 (1)正确使用电工工具及万用表,完成设备、PLC 装置和负载之间的互连线; (2)仔细进行检查,有步骤地进行通电试验,达到项目功能要求; (3)注意人身和设备安全,遵守安全操作规程。
目录 目录 (1) 第一章课程设计题目 (5) 1.1 设计带式运输机 (5) 1.2运动简图 (5) 1.3 原始设计数据 (5) 1.4 工作条件 (5) 第二章总体设计 (7) 2.1电动机的选择。 (7) 2.1.1 电动机型号选择: (7) 2.1.2 工作所需功率: (7) 2.1.3 电动机所需功率: (7) 2.1.4 电动机转速的选择: (7) 2.2 传动比分配 (8) 2.3传动装置的运动和动力参数 (8) 2.3.1 各轴的转速计算 (8) 2.3.2 各轴输出功率计算 (8) 2.3.3 各轴输入转矩计算 (9) 第三章传动零件设计 (10) 3.1 V带的设计与计算 (10) 3.1.1 确定计算功率Pca (10) 3.1.2 选择V带的带型 (10) 3.1.3 确定带轮的基准直径d d1 (10) 3.1.4 验算带速v (10) 3.1.5 计算大带轮的直径 (10) 3.1.6 确定V带的中心距a和基准长度Ld (10) 3.1.7 计算V带根数Z (11) 3.1.8 计算单根V带的初拉力的最小值。 (11) 3.1.9 计算轴压力Fp (11)
3.1.10 带轮设计 (11) 3.1.11 V带传动的主要参数 (11) 3.2 高速级齿轮传动设计 (12) 3.2.1 选定高速齿轮类型,精度等级,材料及齿数 (12) 3.2.2 按齿面接触强度设计 (12) 3.2.3 按齿根弯曲疲劳强度设计 (14) 3.2.4 几何尺寸的计算 (15) 3.2.5 修正计算结果 (16) 3.2.6 高速级齿轮的参数 (17) 3.2.7 高速大齿轮结构参数 (17) 3.3 低速级齿轮传动设计 (18) 3.3.1 选定低速级齿轮类型,精度等级,材料及齿数 (18) 3.3.2 按齿面接触疲劳强度设计 (18) 3.3.3 按齿根弯曲疲劳强度设计 (20) 3.3.4 几何尺寸的计算 (21) 3.3.5 修正计算结果 (22) 3.3.6 低速级齿轮的参数 (23) 3.3.7 低速大齿轮结构参数 (23) 第四章轴的设计 (25) 4.1 轴的材料选择和最小直径估算。 (25) 4.1.1 高速轴: (25) 4.1.2 中间轴: (25) 4.1.3 低速轴: (25) 4.2轴的结构设计 (25) 4.2.1 高速轴 (25) 4.2.2 中间轴 (26) 4.2.3 低速轴 (26) 4.2.4 细部机构设计 (27) 第五章轴的校核 (28) 5.1 中间轴上作用力的计算 (28)
关于印发《大型起重机械安装安全监控管理系统实施方案》的通知(国质检特联〔2011〕137 号) 国质检特联〔2011〕137号 关于印发《大型起重机械 安装安全监控管理系统实施方案》的通知 各省、自治区、直辖市质量技术监督局,安全生产监督管理局:根据《国务院关于进一步加强企业安全生产工作的通知》(国发〔2010〕23号)和《国务院办公厅印发贯彻落实〈国务院关于进一步加强企业安全生产工作的通知〉重点工作分工方案的通知》(国办函〔2010〕140号)的要求,国家质检总局与国家安全监管总局联合制定了《大型起重机械安装安全监控管理系统实施方案》,现印发给你们,请结合本地区、本部门实际,认真贯彻落实。 二〇一一年三月二十五日 大型起重机械安装安全监控管理系统实施方案
为贯彻落实《国务院关于进一步加强企业安全生产工作的通知》(国发〔2010〕23号,以下简称《通知》)要求,推动大型起重机械安装安全监控管理系统工作,提高大型起重机械本质安全,预防和减少起重机械重特大事故发生,制订本工作方案。 一、指导思想 坚持“以人为本,安全发展”的原则和“安全第一、预防为主、综合治理”的方针,应用现代物联网信息管理技术,以生产单位和使用单位为主体,提高大型起重机械本质安全性能,促进产品升级换代,防范事故发生,保障从业人员和公众的生命安全。 二、总体目标 在“十二五”期间,以公路建设、铁路建设、电站建设、船舶修造等行业(领域)为重点,逐步在新制造和在用大型起重机械上安装安全监控管理系统,强化大型起重机械技术安全管理和控制,促进现场操作标准化和规范化,实现大型起重机械安全形势的根本好转。 三、工作机制 (一)发挥企业积极性。此项工作以大型起重机械使用单位和生产单位为主体,首先选择有条件的单位进行试点,充分发挥试点单位的作用和积极性,在此基础上再逐步扩大试点并推广。
课程设计任务书 课程名称机械设计课程设计 课题名称皮带运输机传动装置专业班级 姓名 学号 指导教师 审批 汽车与交通学院交通工程教研室
机械设计课程设计说明书课题名称:皮带运输机传动装置 班级: 学号: 设计人: 指导教师 完成日期
目录 一、设计任务书 (3) 二、电动机的选择 (5) 三、计算传动装置的运动和动力参数 (7) 四、传动件设计计算............ (8) 五、轴的设计.......... .......... .......... ........... .. .. . (14) 六、润滑方式、润滑油牌号及密封装置的选择 (21) 七、箱体及其附件的结构设计 (21) 八、设计总结 (24) 九、参考资料 (24)
设计任务书 题目:设计皮带运输机的二级直齿圆柱齿轮减速器。 课题号:1 技术数据:输送带有效拉力F=2000N 带速V=0.8m/s 滚筒直径D=200mm 带式运输机的传动示意图 图中,1——电动机2——三角皮带传动3——齿轮减速器4——滚动轴承5——联轴器6——滑动轴承7——运输皮带8——滚筒 工作条件及技术要求: 电源380V; 工作年限:10年; 工作班制:两班 运输机单项运转,工作平稳。 η1,带传动的效率; η2,齿轮的效率;
η3,滚动轴承传动效率; η4,联轴器的传动效率; η5,滑动轴承的传动效率; η6,卷筒的传动效率; η6,卷筒的传动效率; 电动机的机选择 动力来源:电力,三相交流电,电压380V ;所以选用常用的封闭式系列的 ——交流电动机。 1. 电动机容量的选择 1)工作机所需功率P w 由题中条件 查询工作情况系数K A (见[1]表8-7),查得K A=1.2 设计方案的总效率 n 0=n 1*n 2*n 3*n 4*n 5*n 6…n n 本设计中的 η带 ——v 带的传动效率, η滚轴——滚动轴承的传动效率 (3对),齿η—— 齿轮的传动效率(2对),联η——联轴器的传动效率(1个)η滑轴——滑动轴承的传动效率 (2对),η筒——滚筒的传动效率。 其中 η带 =0.96,η轴滚=0.99,齿η=0.97(两对齿 轮的效率取相等),联η=0.99, η滑轴=0.97,η筒=0.96。 总η=322 η带齿联滑轴筒 滚轴ηηηηη=0.96*0.97*0.97*0.99*0.99*o.99*0.99*0.97*0.96=0.808 1.电动机的输出功率 P w==1.6KW Pd = Pw/ 总 η, 总η=0.808 Pd =1.6/0.808=1.98KW 2. 电动机转速的选择 由v=0.8m/s 求卷筒转速n w V = 1000 *60w dn π=0.8 →w n =76.39r/min, i 总=i1’·i2’…in ’ 由该传动方案知,在该系统存在减速器二级传动比i1,i2和带传动传动比。由[2]表2.1知。二级展开式圆柱齿轮减速器传动比范围为8~40,v 带传动i 带<=8,取i 带=2.4 所以 d n =[8,40]* w n *2.4 所以nd 的范围是(1466.6,7333.44)r/min ,初选为同步转速