野外应急救援灯杆
功能介绍:野外山区应急救援太阳能灯杆高6米,自备太阳能电池板,顶端有夜间自动闪烁灯,下部有手机充电装置可直接为手机电池充电。每根灯杆有特定灯杆编号,夜间可发光。山区户外运动者可通过手机报警报告灯杆编号并在此等待救援。 编码说明:HCL-黄草梁;LS-灵山;TTS-铁坨山;HTS-海陀山;SS-松山;YDS-玉渡山;SCK-三岔口;YMS-云蒙山;YTS-阳台山;JF-鹫峰;FHL-凤凰岭;QLS-千灵山;MES-猫儿山;CSL-喇叭沟门原始次生林景区。 今后,标有全市灯杆位置的地图将在110报警服务台、市应急办、各区县应急办间共享,这一后方操作平台上将直接显现所有灯杆的经度、纬度,三维成像,实现更准确救援。
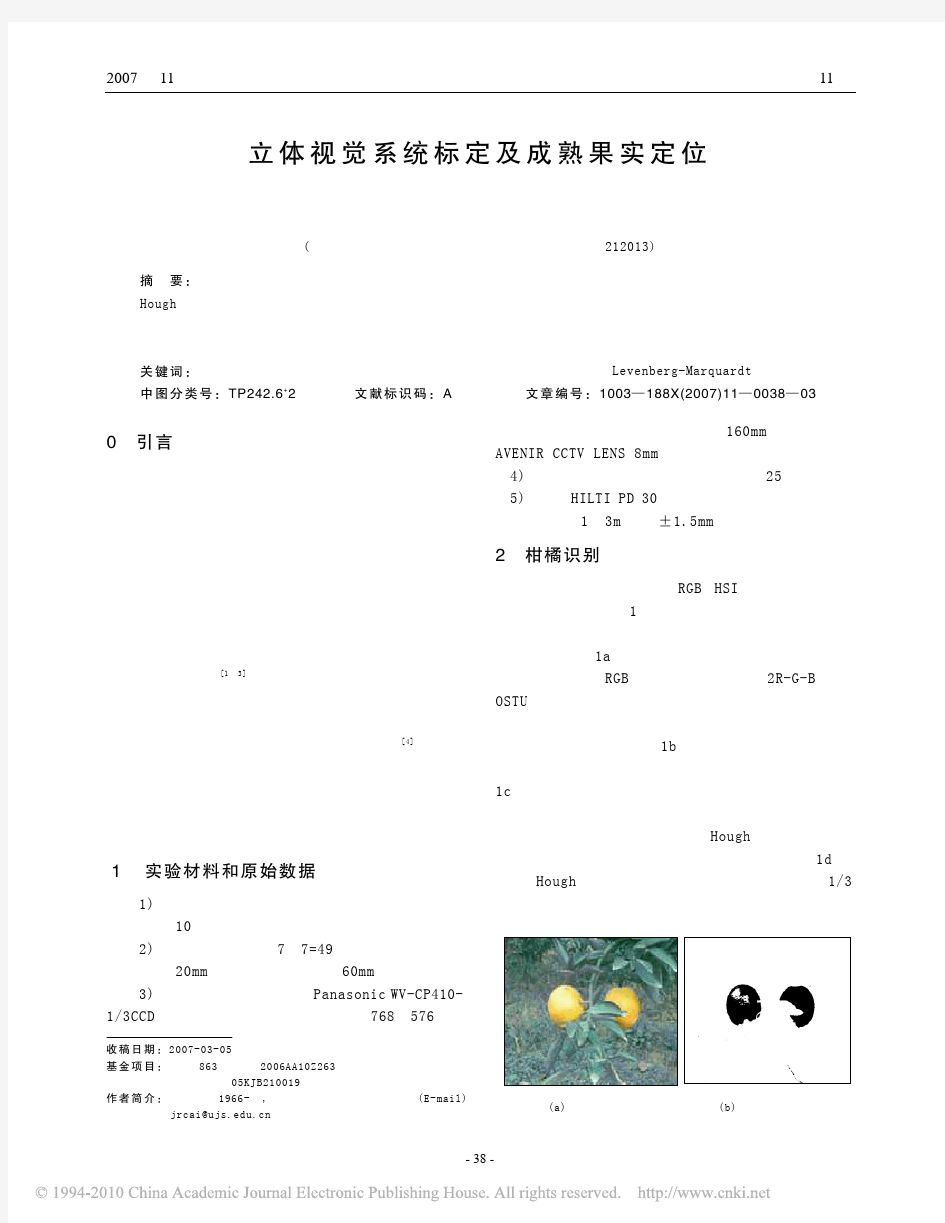
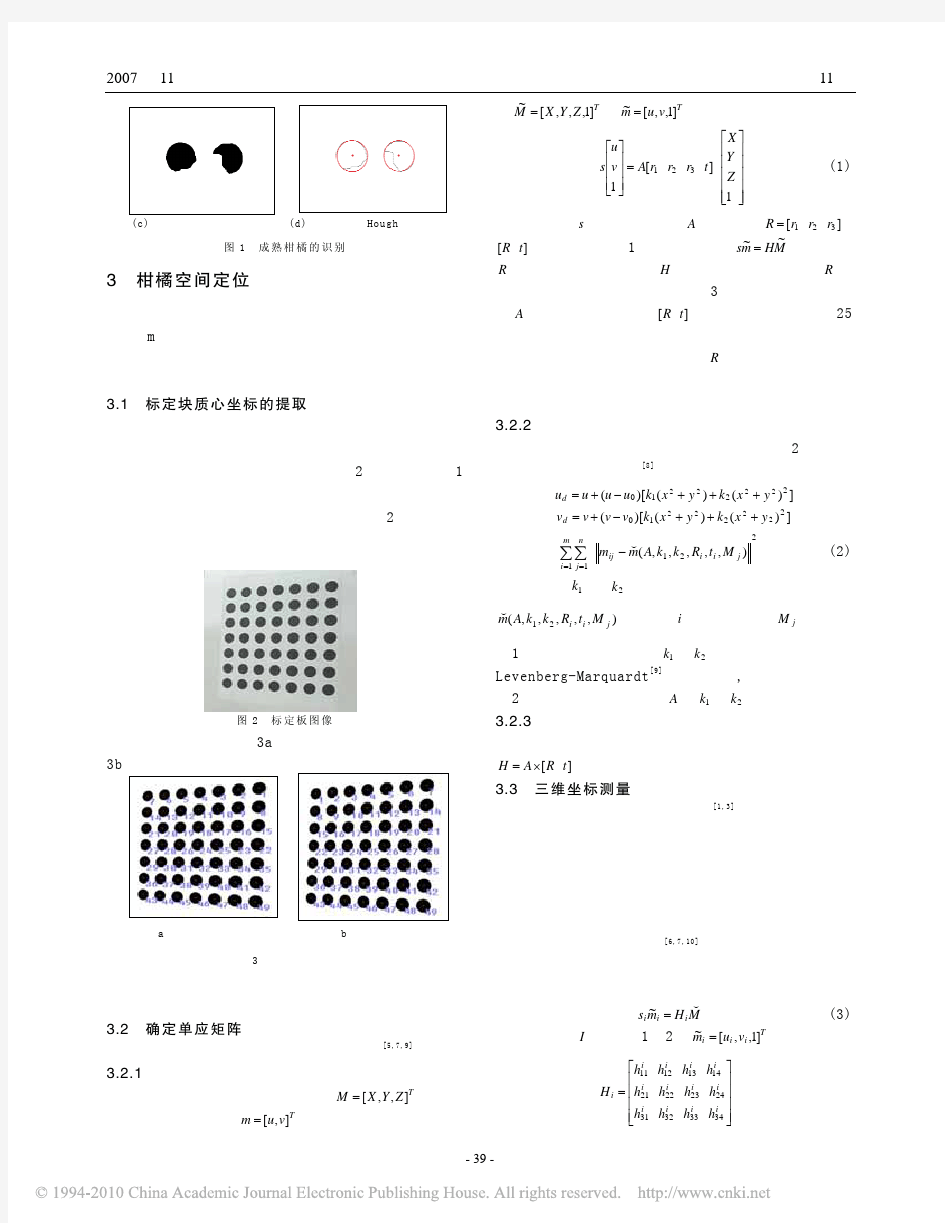
野外山区应急救援太阳能灯杆分布略图,可在北京市旅游局电子政务网站上查看具体分布情况。 北京市拥有丰富的山地资源和登山、户外运动爱好者,野外登山管理工作面临巨大挑战。据统计,北京市目前拥有乡村景区244个,其中山区风景名胜区27个,总面积2257.9平方公里,全市森林公园22处,总面积736.91平方公里,对于进入非景区探险的人员在管理和救助上存在很大困难。 为了加强野外登山管理工作,将由市体育局牵头,对全市山区景区及森林公园进行普查,对“驴友”经常前往的地区实行编号,按照危险程度划分风险等级,供不同水平的野外登山爱好者选择,同时提供完备的登山风险等级说明。同时,利用现有专业登山队、市森林消防总队的专业力量,组成野外登山救援队。 另外,本市拟制定《北京市户外运动管理规定》,对从业组织、人员和机构进行规范性管理。建立野外登山登记制度,鼓励自发组织进行野外登山活动的“驴友”通过该网站登记野外登山去向及无线电台频率。 虽然管理部门正在不断努力完善应急救援体系,但他们也呼吁广大市民,尽量不要到没有开放的地区登山,控制和避免风险。
视觉定位软件 V i s i o n K i t软件说明书 HEN system office room 【HEN16H-HENS2AHENS8Q8-HENH1688】
文件名称:视觉定位软件VisionKit使用说明书文件版本:中文简体版 文件页数:共 42 页(含此页) 编制: 审核: 标准化: 批准: 日期: 大族激光科技产业集团股份有限公司 视觉定位软件VisionKit 使用说明书 (版本:中文简体版) 大族激光科技产业集团股份有限公司
声明 版权所有 ? 大族激光科技产业集团股份有限公司保留一切权利。 未经大族激光科技股份有限公司的许可,任何组织和个人不得擅自摘抄、复制文档内容的部分或全部,并不得以任何形式传播。 商标声明 和其它大族商标均为大族激光科技产业集团股份有限公司的注册商标,并对其享有独占使用、许可使用、转让、续展等各项法定权利,未经大族激光科技产业集团股份有限公司允许,任何组织或个人不得在商品上使用相同或类似的商标。 注意 在所规定的支持保修范围内,大族激光科技产业集团股份有限公司履行承诺的保修服务,超出所在规定的保修范围的,恕不承担保修服务。对于在使用本产品过程中可能造成的损失,大族激光科技产业集团股份有限公司不承担相关责任。如发生任何争议,应按中华人民共和国的相关法律解 决。 大族激光科技产业集团股份有限公司随时可能因为软件或硬件升级对使用说明书的内容进行更新,所有这些更新都将纳入使用说明书新的版本中,恕不另行通知。 目录
一、软件概述 视觉定位软件VIsionKit是大族激光科技产业集团股份有限公司光纤打标产品线开发的一款定制的机器视觉定位软件,通过CCD视觉定位后将位置偏差数据发送至打标软件系统进行补偿校正打标,实现产品精确定位打标功能。视觉定位打标系统通常由CCD定位软件、具有数据通讯和偏位补偿功能的打标软件系统、以及数据通讯网络(COM232或IP/TCP网络)等三大模块组成。二、环境安装 环境要求 操作系统:Windows XP以上,推荐Windows 7(32)位系统,暂不支持64位系统。 最低硬件配置: CPU:赛扬1G以上; 内存:至少1GB,建议2GB以上; 硬盘:至少500MB可用空间,建议预留更多的可用空间。 软件安装 安装halcon基础软件
陀螺仪辅助定位方法 陀螺仪辅助定位方法 CN 103644911 A 摘要 本发明公开了一种陀螺仪辅助定位方法,包括以下步骤:首先、姿态角的测量:对加速度计的测量值和磁 传感器的测量值分别经过高斯牛顿迭代得到姿态误差速率, 陀螺仪直接通过四元数微分方程得到姿态四元数速率,两个 加起来积分得到姿态四元数;其次、初始点的 获取:利用加速度计和陀螺仪芯片两者的数据,进行轨迹推算,以将轨迹周期提高到惯性测量单元的数据周期;第三、速度和移动距离的计算;第四、计算位置点; 第五:纠正位置。本发明针对性的解决了陀螺仪的漂移、载体的线性加速度和周围局部磁场的干扰问题,根据道路数据,对定位结果进行投影修正,并利用修正结果 计算下一个位置点,这样就有效地减小累计误差。 权利要求(1) 1.一种陀螺仪辅助定位方法,其特征在于包括以下步骤: 首先、姿态角的测量:对加速度计的测量值和磁传感器的测量值分别经过高斯牛顿迭代得到姿态误差速率,陀螺仪直接通
过四元数微分方程得到姿态四元数速率,两 个加起来积分得到姿态四元数;其次、初始点的获取:利用加速度计和陀螺仪芯片两者的数据,进行轨迹推算,以将轨迹周期提高到惯性测量单元的数据周期; 第三、速度和移动距离的计算:根据修正过的欧拉角,计算三轴的加速度的分量,从而计算出实际的加速度;在已知初速度,加速度和时间的情况下,通过对初速度 积分和加速度二次积分,计算出移动距离;第四、计算位置点:根据移动距离和方向计算当前的位置点的经纬度; 第五:纠正位置:根据计算的位置点,在道路上进行投影,进行平滑处理,得到纠正后的位置点。 说明 陀螺仪辅助定位方法 技术领域 [0001] 本发明涉及辅助定位方法,尤其是涉及一种脱落及辅助定位及其方法。 背景技术 [0002] 现有的陀螺仪辅助导航方法是采用陀螺仪定位方式,陀螺仪定位方式是基于角速度检测的原理而设计,通过一系列的运
VisionKit 文件名称:视觉定位软件VisionKit使用说明书文件版本:中文简体版 文件页数:共42 页(含此页) 编制: 审核: 标准化: 批准: 日期: 大族激光科技产业集团股份有限公司
VisionKit 视觉定位软件VisionKit 使用说明书 (版本:中文简体版) 大族激光科技产业集团股份有限公司 https://www.doczj.com/doc/fc3032399.html,
声明 版权所有? 大族激光科技产业集团股份有限公司保留一切权利。 未经大族激光科技股份有限公司的许可,任何组织和个人不得擅自摘抄、复制文档内容的部分或全部,并不得以任何形式传播。 商标声明 和其它大族商标均为大族激光科技产业集团股份有限公司的注册商标,并对其享有独占使用、许可使用、转让、续展等各项法定权利,未经大族激光科技产业集团股份有限公司允许,任何组织或个人不得在商品上使用相同或类似的商标。 注意 在所规定的支持保修范围内,大族激光科技产业集团股份有限公司履行承诺的保修服务,超出所在规定的保修范围的,恕不承担保修服务。对于在使用本产品过程中可能造成的损失,大族激光科技产业集团股份有限公司不承担相关责任。如发生任何争议,应按中华人民共和国的相关法律解决。 大族激光科技产业集团股份有限公司随时可能因为软件或硬件升级对使用说明书的内容进行更新,所有这些更新都将纳入使用说明书新的版本中,恕不另行通知。
目录 声明 (3) 一、软件概述 (5) 二、环境安装 (5) 2.1环境要求 (5) 2.2软件安装 (5) 2.2.1 安装halcon基础软件 (5) 2.2.2 安装相机驱动软件 (6) 2.2.3注册串口通讯组件 (10) 2.2.4 VIsionKit软件 (10) 三、软件界面介绍 (10) 3.1主界面 (10) 3.1.1 主界面介绍 (10) 3.1运行界面 (13) 3.1.1 运行界面介绍 (13) 3.2设置界面 (15) 3.2.1 图像标定 (16) 3.2.2 ROI设置 (18) 3.2.3通信设置 (20) 3.2.4 LED设置 (21) 3.3参数界面 (22) 3.3.1编辑定位集 (23) 3.3.2定位模板下拉框 (23) 3.3.3测试 (24) 3.4诊断界面 (25) 3.4.1图像操作 (25) 3.4.2验证补偿 (27) 3.4.3整体补偿 (27) 四、CCD工作流程 (28) 4.1相机标定 (28) 4.2模板制作 (34) 4.3生产运行 (38) 4.4 误差校正 (40) 五、软件操作注意事项 (42) 附录A:软件定制功能 (42) 附录B:术语解释 (42) 附录C:技术支持与服务 (42)
双目视觉成像原理 1.引言 双目立体视觉(Binocular Stereo Vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图。 双目立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点,非常适合于制造现场的在线、非接触产品检测和质量控制。对运动物体(包括动物和人体形体)测量中,由于图像获取是在瞬间完成的,因此立体视觉方法是一种更有效的测量方法。双目立体视觉系统是计算机视觉的关键技术之一,获取空间三维场景的距离信息也是计算机视觉研究中最基础的内容。 2.双目立体视觉系统 立体视觉系统由左右两部摄像机组成。如图一所示,图中分别以下标L和r标注左、右摄像机的相应参数。世界空间中一点A(X,Y,Z)在左右摄像机的成像面C L和C R上的像点分别为al(ul,vl)和ar(ur,vr)。这两个像点是世界空间中同一个对象点A的像,称为“共轭点”。知道了这两个共轭像点,分别作它们与各自相机的光心Ol和Or的连线,即投影线alOl和arOr,它们的交点即为世界空间中的对象点A(X,Y,Z)。这就是立体视觉的基本原理。 图1:立体视觉系统 3.双目立体视觉相关基本理论说明 3.1 双目立体视觉原理 双目立体视觉三维测量是基于视差原理,图2所示为简单的平视双目立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b。摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图2所示。事实上摄像机的成像平面在镜头的光心后,图2中将左右成像平面绘制在镜头的光心前f处,这个虚拟的图像平面坐标系O1uv的u轴和v轴与和摄像机坐标系的x轴和y轴方向一致,这样可以简化计算过程。左右图像坐
文件名称:视觉定位软件VisionKit使用说明书文件版本:中文简体版 文件页数:共 42 页(含此页) 编制: 审核: 标准化: 批准: 日期:
大族激光科技产业集团股份有限公司 视觉定位软件VisionKit 使用说明书 (版本:中文简体版)
大族激光科技产业集团股份有限公司 声明 版权所有?大族激光科技产业集团股份有限公司保留一切权利。 未经大族激光科技股份有限公司的许可,任何组织和个人不得擅自摘抄、复制文档内容的部分或全部,并不得以任何形式传播。 商标声明 和其它大族商标均为大族激光科技产业集团股份有限公司的注册商标,并对其享有独占使用、许可使用、转让、续展等各项法定权利,未经大族激光科技产业集团股份有限公司允许,任何组织或个人不得在商品上使用相同或类似的商标。 注意 在所规定的支持保修范围内,大族激光科技产业集团股份有限公
司履行承诺的保修服务,超出所在规定的保修范围的,恕不承担保修服务。对于在使用本产品过程中可能造成的损失,大族激光科技产业集团股份有限公司不承担相关责任。如发生任何争议,应按中华人民共和国的相关法律解决。 大族激光科技产业集团股份有限公司随时可能因为软件或硬件升级对使用说明书的内容进行更新,所有这些更新都将纳入使用说明书新的版本中,恕不另行通知。 目录 声明 (3) 一、软件概述 (5) 二、环境安装 (5)
软件安装 (5) 安装halcon基础软件 (5) 安装相机驱动软件 (6) 注册串口通讯组件 (10) VIsionKit软件 (10) 三、软件界面介绍 (10) 主界面 (10) 主界面介绍 (10) 运行界面 (13) 运行界面介绍 (13) 设置界面 (15) 图像标定 (16) ROI设置 (18) 通信设置 (20)
全球定位系统(GPS)术语及定义 全球定位系统(GPS)术语及定义 【中华人民共和国国家标准GB/T 19391-2003 】2004-12-24 5:55:15 1范围 本标准规定了全球定位系统(GPS)常用术语及定义。 本标准适用于GPS专业范围内的各种标准的制定、各类技术文件的编制,也适用于科研、教学等方面。 2通用术语 2.1 全球定位系统global positioning system(GPS) 导航星navigation by satellite timing and ranging(NA VSTAR) 一种卫星导航定位系统。由空间段、地面控制段和用户段三部分组成.为伞球用户提供实时的三维位置、速度和时间信息。包括主要为军用的精密定位服务(PPS)和民用的标准定位服务(SPS)。 2.2 全球导航卫星系统global navigation satellite system(GLONASS) 一种全球卫星导航定位系统:为全球用户提供实时的三维位置、速度和时间信息。包括军用和民用两种服务。 2.3 伽利略系统Galileo system 一种民用全球卫星导航系统; 2.4 全球导航卫星系统global navigation satellite system(GNSS) 由国际民航组织提出的概念。GNSS的最终目标是由多种民用卫星导航系统组成,向全球民间提供服务。并将由多国民间参与运行和控制的卫星导航系统。GNSS也已经为国际海事组织(IMO)所接受。欧洲的GNSS计划分为两个阶段,即GNSS-1和GNSS-2。GNSS-1为EGNOS(欧洲地球静止轨道卫星导航重叠服务)系统,GNSS-2为Galileo(伽利略)系统。 2.5 静地星/定位星系统Geostar/Locstar system 一种卫星定位系统,利用两颗地球轨道静止卫星双程测距而实现定位功能,兼有简短报文通信能力。 2.6 海军导航卫星系统navy navigation satellite system(NNSS) 子午仪Transit 是1960年由美国研制的卫星导航系统,为固定用户或低动态用户提供不连续定位信息。 注:已于l997年12月31日关闭。 2.7 国际GPS动力学服务international GPS geodynamics service(IGS) 国际大地测量协会于1994年创立的国际GPS研究服务机构。它负责向世界各国的GPS 用户提供精密的星历、地球旋转参数、全球GPS跟踪网数据等多种信息。
机器视觉检测 一、概念 视觉检测是指通过机器视觉产品(即图像摄取装置,分 CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉检测的特点是提高生产的柔性和自动化程度。 2、典型结构 五大块:照明、镜头、相机、图像采集卡、软件 1.照明 照明是影响机器视觉系统输入的重要因素,它直接影响输入数据的质量和应用效果。目前没有通用的照明设备,具体应用场景选择相应的照明装置。照射方法可分为: 分类具体说明优点 背向照明被测物放在光源和摄像机之 间能获得高对比度的图像 前向照明光源和摄像机位于被测物的 同侧 便于安装 结构光将光栅或线光源等投射到被 测物上,根据它们产生的畸 变,解调出被测物的三维信 息 频闪光照明将高频率的光脉冲照射到物
体上,摄像机拍摄要求与光 源同步 2.镜头 镜头的选择应注意以下几点:焦距、目标高度、影像高度、放大倍数、影响至目标的距离、中心点/节点、畸变。 3.相机 按照不同标准可分为:标准分辨率数字相机和模拟相机等。 要根据不同的实际应用场合选不同的相机和高分辨率相机:线扫描CCD 和面阵CCD;单色相机和彩色相机。 为优化捕捉到的图像,需要对光圈、对比度和快门速度进行调整。 4.图像采集卡 图像采集卡是图像采集部分和图像处理部分的接口。将图像信号采集到电脑中,以数据文件的形式保存在硬盘上。通过它,可以把摄像机拍摄的视频信号从摄像带上转存到计算机中。 5.软件 视觉检测系统使用软件处理图像。软件采用算法工具帮助分析图像。视觉检测解决方案使用此类工具组合来完成所需要的检测。是视觉检测的核心部分,最终形成缺陷的判断并能向后续执行机构发出指令。常用的包括,搜索工具,边界工具,特征分析工具,过程工具,视觉打印工具等。 3、关键——光源的选择 1.光源选型基本要素: 对比度机器视觉应用的照明的最重要的任务就是使需要被观察的特征与需要被忽略的图像特征之间产生最大的对比度,从而易于特
双目视觉成像原理
双目视觉成像原理 1.引言 双目立体视觉(Binocular Stereo Vision)是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点间的位置偏差,来获取物体三维几何信息的方法。融合两只眼睛获得的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作视差(Disparity)图。 双目立体视觉测量方法具有效率高、精度合适、系统结构简单、成本低等优点,非常适合于制造现场的在线、非接触产品检测和质量控制。对运动物体(包括动物和人体形体)测量中,由于图像获取是在瞬间完成的,因此立体视觉方法是一种更有效的测量方法。双目立体视觉系统是计算机视觉的关键技术之一,获取空间三维场景的距离信息也是计算机视觉研究中最基础的内容。2.双目立体视觉系统 立体视觉系统由左右两部摄像机组成。如图一所示,图中分别以下标L和r标注左、右摄像机的相应参数。世界空间中一点A(X,Y,Z)在左右摄像机的成像面C L和C R上的像点分别为al(ul,vl)和ar(ur,vr)。这两个像点是世界空间中同一个对象点A的像,称为“共轭点”。知道了这两个共轭像点,分别作它们与各自相机的光心Ol和Or的连线,即投影线alOl和arOr,它们的交点即为世界空间中的对象点A(X,Y,Z)。这就是立体视觉的基本原理。
图1:立体视觉系统 3.双目立体视觉相关基本理论说明 3.1 双目立体视觉原理 双目立体视觉三维测量是基于视差原理,图2所示为简单的平视双目 立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b 。摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图2所示。事实上摄像机的成像平面在镜头的光心后,图2中将左右成像平面绘制在镜头的光心前f 处,这个虚拟的图像平面坐标系O1uv 的u 轴和v 轴与和摄像机坐标系的x 轴和y 轴方向一致,这样可以简化计算过程。左右图像坐标系的原点在摄像机光轴与平面的交点O1和O2。空间中某点P 在左图像和右图像中相应的坐标分别为P1(u1,v1)和P2(u2,v2)。假定两摄像机的图像在同一个平面上,则点P 图像坐标的Y 坐标相同,即v1=v2。由三角几何关系得到: c c 1z x f u = c c 2z )b -x (f u = v 1 c c 21z y f v v ==
机器视觉技术应用--视觉定位系统 (编辑:李军单位:无锡创视新科技有限公司) 当前,工业产品种类繁多,在工业产品的生产过程中,都可能涉及到自动定位。如自动化生产线中要求对各零件快速、准确的安装到位。但目前还有部分加工厂还都采用传统的人工定位方法,此方法存在以下缺点: (1)长时间定位单一产品,检测工人眼睛容易疲劳,并且容易受情绪的影响,定位结果难以保证; (2)每个工人对同种被定位准确性的判断标准有轻微的浮动,定位标准不一致,因此很难保证高质量的产品; (3)人工定位的速度相对很慢,定位准确一个产品就需要很长时间,人工定位无法满足高速生产线的在线定位需求。 随着科技的发展,市场及用户对产品的精密程度和质量的要求越来越高,传统的定位方法已经不能满足用户的需求,因此,行业便相继引进机器视觉技术。 机器视觉就是用机器代替人眼来做测量和判断,通过机器视觉产品(即图像摄取装置,分 CMOS 和CCD 两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉技术具备定位功能,能够自动判断物体的位置,并将位置信息通过一定的通讯协议输出。此功能多用于全自动装配和生产,譬如自动组装、自动焊接、自动包装、自动灌装、自动喷涂,多配合自动执行机构(机械手、焊枪、喷嘴等)。 基于机器视觉的视觉定位技术得到了广大加工厂商的普遍关注,全自动视觉定位方法不但克服了传统人工定位方法的缺点,同时也发挥了自己快速准确的优点:(1)定位精度高,定位结果可靠、稳定; (2)定位速度快,并且可以长时间工作,可以达到24小时全天运行。 在视觉定位检测系统中,能够准确识别产品的方向和位置是系统的核心。定位检测可分为两个步骤,一是制作标准模板,二是搜索。视觉定位系统采用先进的图像视觉检测技术,实现对高速运动的工业产品进行实时全面的视觉定位分析。当系统配备一台高性能彩
万方数据
万方数据
万方数据
万方数据
单目视觉定位方法研究综述 作者:李荣明, 芦利斌, 金国栋 作者单位:第二炮兵工程学院602教研室,西安,710025 刊名: 现代计算机:下半月版 英文刊名:Modem Computer 年,卷(期):2011(11) 参考文献(29条) 1.R.Horaud;B.Conio;O.Leboullcux An Analytic Solution for the Perspective 4-Point Problem 1989(01) 2.任沁源基于视觉信息的微小型无人直升机地标识别与位姿估计研究 2008 3.徐筱龙;徐国华;陈俊水下机器人的单目视觉定位系统[期刊论文]-传感器与微系统 2010(07) 4.邹伟;喻俊志;徐德基于ARM处理器的单目视觉测距定位系统[期刊论文]-控制工程 2010(04) 5.胡占义;雷成;吴福朝关于P4P问题的一点讨论[期刊论文]-自动化学报 2001(06) 6.Abdel-Aziz Y;Karara H Direct Linear Transformation from Comparator to Object Space Coordinates in Close-Range Ph- togrammetry 1971 7.Fishier M A;Bolles R C Random Sample Consensus:A Paradigm for Model Fitting with Applications to Image Analy-s~s anu Automated tartograpny 1981(06) 8.祝世平;强锡富用于摄像机定位的单目视觉方法研究[期刊论文]-光学学报 2001(03) 9.沈慧杰基于单目视觉的摄像机定位方法的研究 2009 10.任沁源;李平;韩波基于视觉信息的微型无人直升机位姿估计[期刊论文]-浙江大学学报(工学版) 2009(01) 11.刘立基于多尺度特征的图像匹配与目标定位研究[学位论文] 2008 12.张治国基于单目视觉的定位系统研究[学位论文] 2009 13.张广军;周富强基于双圆特征的无人机着陆位置姿态视觉测量方法[期刊论文]-航空学报 2005(03) 14.Zen Chen;JenBin Huang A Vision-Based Method for theCircle Pose Determination with a Direct Geometric Interpre- tation[外文期刊] 1999(06) 15.Safaee-Rad;I.Tchoukanov;K.C.Smith Three-Dimension of Circular Features for Machine Vision 1992 16.S.D.Ma;S.H.Si;Z.Y.Chen Quadric Curve Based Stereo 1992 17.D.A.Forsyth;J.L.Munday;A.Zisserman Projective In- variant Representation Using Implicit Algebraic Curves 1991(02) 18.吴朝福;胡占义PNP问题的线性求解算法[期刊论文]-软件学报 2003(03) 19.降丽娟;胡玉兰;魏英姿一种基于平面四边形的视觉定位算法[期刊论文]-沈阳理工大学学报 2009(02) 20.Sun Fengmei;Wang Weining Pose Determination from a Single Image of a Single Parallelogram[期刊论文]-Acta Automatica Sinica 2006(05) 21.吴福朝;王光辉;胡占义由矩形确定摄像机内参数与位置的线性方法[期刊论文]-软件学报 2003(03) 22.王晓剑;潘顺良;邱力为基于双平行线特征的位姿估计解析算法[期刊论文]-仪器仪表学报 2008(03) 23.刘晓杰基于视觉的微小型四旋翼飞行器位姿估计研究与实现 2009 24.刘士清;胡春华;朱纪洪一种基于灭影线的无人直升机位姿估计方法[期刊论文]-计算机工程与应用 2004(9) 25.Mukundan R;Raghu Narayanan R V;Philip N K A Vision Based Attitude and Position Estimation Algorithm for Rendezvous and Docking 1994(02)
具有简单视觉功能的直线定位系统设计 芦飞 湖南师范大学 摘要:本次论文主要是先设计1米左右的线轨装置,然后使其同时具有简单的视觉功能,能够在其左右平移范围内搜寻并定位预先设定的小圆圈、小三角形、小正方形等标记。本次论文采用摄像头的形式来采集图像,并且通过MATLAB编程实现图像的识别。设计的主要内容包括确定线轨的搭建材料、主要结构,驱动的机械部件、控制方式及其电路,视觉处理的主要部件选型及匹配搜索算法等,在本篇论文中主要是针对视觉处理的主要部件即摄像头的类型的选型和匹配的搜索算法进行阐述。 关键字:视觉跟踪;匹配算法;单摄像头 1.引言 视频图像能够对现实生活中的客观事物进行生动、形象、直观和连续的表达,因此被广泛应用在工业生产、安防、智能机器人和生物等领域。随着计算机网络、通信和半导体技术的迅速发展,人们越来越青睐于利用计算机视觉代替人眼对传感器得到的视频图像进行分析,获取图像中的有用信息。视频跟踪就是计算机视觉研究的一个重点,它主要是对图像传感器得到的感兴趣的目标进行跟踪。视频跟踪是许多视频应用的基础,比如交通监控、智能机器人和人机交互等,因此视频跟踪技术是目前研究的热点。 2.主要机械器件的选择 2.1机器视觉系统的视觉部件的设计 本次论文中的系统主要分为目标提取识别和目标跟踪定位两大模块,目标提取识别模块由边缘提取,特征提取,图像分割等方法实现。其实质是用数字图像处理的方法实现对目标的识别,数字图像处理一般包括图像的获取,增强,存储,处理,表达和识别等步骤。 在目标识别之前,首先要进行目标采集,就需要用到摄像头,即机器视觉系统。机器视觉系统应该包括图像感应器与透镜系统,这通常整体称作摄像系统,可需要通过火线,USB 或以太网等电气接口连接到计算机上,而计算机则连接至控制设备。本文所用设备为UAB 摄像头,所采集图片的颜色空间为RGB空间,然后选取目标的颜色模板,通过特征匹配和领域线性搜索等检测跟踪算法,最终实现对目标的识别与跟踪。 一个经典的机器视觉应用系统包括光源,光学镜头,摄像机,图像采集卡,图像处理系统,控制执行模块等等。
基于机器视觉的工件识别和定位文献综述 1.前言 1.1工业机器人的现状与发展趋势 机器人作为一种最典型的应用范围广、技术附加值高的数字控制装备,在现代先进生产制造业中发挥的作用越来越重要,机器人技术的发展将会对未来生产和社会发展起到强有力的推动作用。《2l 世纪日本创建机器人社会技术发展战略报告》指出,“机器人技术与信息技术一样,在强化产业竞争力方面是极为重要的战略高技术领域。培育未来机器人产业是支撑2l 世纪日本产业竞争力的产业战略之一,具有非常重要的意义。” 研发工业机器人的初衷是为了使工人能够从单调重复作业、危险恶劣环境作业中解脱出来,但近些年来,工厂和企业引进工业机器人的主要目的则更多地是为了提高生产效率和保证产品质量。因为机器人的使用寿命很长,大都在10 年以上,并且可以全天后不间断的保持连续、高效地工作状态,因此被广泛应用于各行各业,主要进行焊接、装配、搬运、加工、喷涂、码垛等复杂作业。伴随着工业机器人研究技术的成熟和现代制造业对自动生产的需要,工业机器人越来越被广泛的应用到现代化的生产中。 现在机器人的价格相比过去已经下降很多,并且以后还会继续下降,但目前全世界范围的劳动力成本都有所上涨,个别国家和地区劳动力成本又很高,这就给工业机器人的需求提供了广阔的市场空间,工业机器人销量的保持着较快速度的增长。工业机器人在生产中主要有机器人工作单元和机器人工作生产线这两种应用方式,并且在国外,机器人工作生产线已经成为工业机器人主要的应用方式。以机器人为核心的自动化生产线适应了现代制造业多品种、少批量的柔性生产发展方向,具有广阔的市场发展前景和强劲生命力,已开发出多种面向汽车、电气机械等行业的自动化成套装备和生产线产品。在发达国家,机器人自动化生产线已经应用到了各行各业,并且已经形成一个庞大的产业链。像日本的FANUC、MOTOMAN,瑞典的ABB、德国的KUKA、意大利的COMAU 等都是国际上知名的被广泛用于自动化生产线的工业机器人。这些产品代表着当今世界工业机器人的最高水平。 我国的工业机器人前期发展比较缓慢。当将被研发列入国家有关计划后,发展速度就明显加快。特别是在每次国家的五年规划和“863”计划的重点支持下,我国机器人技术的研究取得了重大发展。在机器人基础技术和关键技术方面都取得了巨大进展,科技成果已经在实际工作中得到转化。以沈阳新松机器人为代表的国内机器人自主品牌已迅速崛起并逐步缩小与国际品牌的技术差距。 机器人涉及到多学科的交叉融合,涉及到机械、电子、计算机、通讯、控制等多个方面。在现代制造业中,伴随着工业机器人应用范围的扩大和机器人技术的发展,机器人的自动化、智能化和网络化的程度也越来越高,所能实现的功能也越来越多,性能越来越好。机器人技术的内涵已变为“灵活应用机器人技术的、具有实在动作功能的智能化系统。”目前,工业机器人技术正在向智能机器和智能系统的方向发展,其发展趋势主要为:结构的模块化和可重构化;控制技术的开放化、PC 化和网络化;伺服驱动技术的数字化和分散化;多传感器融合技术的实用化;工作环境设计的优化和作业的柔性化以及系统的网络化和智能化等方面。 1.2机器视觉在工业机器人中的应用 工业机器人是FMS(柔性加工)加工单元的主要组成部分,它的灵活性和柔性使其成为自动化物流系统中必不可少的设备,主要用于物料、工件的装卸、分捡和贮运。目前在全世界有数以百万的各种类型的工业机器人应用在机械制造、零件加工和装配及运输等领域,
收稿日期:2013-04-05;修订日期:2013-05-03 基金项目:国家自然科学基金(61275011);国家自然科学基金(51005222) 作者简介:王小蕾(1976-),女,硕士生,主要从事信号检测方面的研究。Email:wxl-20062006@https://www.doczj.com/doc/fc3032399.html, 导师简介:王克逸(1962-),男,教授,博士生导师,博士后,主要从事近场光学和微光学的教学和科研方面的研究。 Email:kywang@https://www.doczj.com/doc/fc3032399.html, 目标定位仿生复眼视觉系统成像位置计算 王小蕾,王克逸,曹兆楼,闫培正,郭方 (中国科学技术大学精密机械与精密仪器系,安徽合肥230027) 摘要:用于目标定位的仿生复眼视觉系统,目标成像位置的精确计算是提高系统定位精度的关键。文章从像斑能量分布的角度出发,介绍了一种较为适于复眼成像位置计算的方法:能量对称法。该方法以主光线在像斑上的坐标定义像斑重心,以主光线像点是像斑能量对称中心的原理来获得像斑重心(即像斑位置)。文中以仿生复眼视觉系统的简化模型为研究对象,应用能量对称法对理论模拟像斑和实验像斑进行了实际计算,计算表明理论像斑位置可以通过能量对称法准确得到;利用实验像斑位置计算入射光线角度也达到了较为理想的计算精度。文中采用传统的灰度重心法同步计算,与新方法形成对比。关键词:目标定位;复眼;像斑重心;能量;灰度重心法中图分类号:TP391.4;TP391.9文献标志码:A 文章编号:1007-2276(2013)12-3433-07 Location of the target image for compound eye system Wang Xiaolei,Wang Keyi,Cao Zhaolou,Yan Peizheng,Guo Fang (Department of Precision Machinery &Instrumentation,University of Science and Technology of China,Hefei 230027,China)Abstract:Accurate calculation of the spotlight center position on the image is important to improve target localization accuracy for compound eye system.A method of calculating the spotlight position was introduced based on the symmetric property of the energy field.The position of main light on the image was defined as the position of the light spot on the image,and can be get by calculating the point of the spot energy centre on the image.Simulation and real images were used both with gray gravity method and energy method respectively,and the results show that energy method agrees with ideal position.Incident angle was calculated from the position of the image spot,the result shows energy method is also better than gray gravity method. Key word:target position;compound eye;spotlight center position;energy;gray gravity 第42卷第12期 红外与激光工程2013年12月Vol.42No.12Infrared and Laser Engineering Dec .2013
计算机双目立体视觉 双目立体视觉技术是仿照人类利用双目线索感知深度信息的方法,实现对三维信息的感知。为解决智能机器人抓取物体、视觉导航、目标跟踪等奠定基础。 双目立体视觉(Binocular Stereo Vision )是机器视觉的一种重要形式,它是基于视差原理并利用成像设备从不同的位置获取被测物体的两幅图像,通过计算图像对应点之间的位置偏差,来获取物体三维几何信息的方法。融合两只眼睛获取的图像并观察它们之间的差别,使我们可以获得明显的深度感,建立特征间的对应关系,将同一空间物理点在不同图像中的映像点对应起来,这个差别,我们称作为视差(Disparity )图像。 双目立体视觉系统 立体视觉系统由左右两部摄像机组成,如图,世界空间中的一点A(X,Y ,Z)在左右摄像机的成像面1C 和r C 上的像点分别为)(111,v u a 和) (r r r v u a ,。这两个像点是世界空间中同一个对象点A 的像,称为“共轭点”。知道了这两个共轭像点,分别作它们与各自相机的光心1O 和r O 的连线,即投影线11O a 和r r O a ,它们的交点即为世界空间中的对象点A 。这就是立体视觉的基本原理。 双目立体视觉智能视频分析技术 恢复场景的3D 信息是立体视觉研究中最基本的目标,为实现这一目标,一个完整的立体视觉系统通常包含六个模块:图像获取、摄像机标定、特征提取、立体匹配、三维恢复和视频
分析(运动检测、运动跟踪、规则判断、报警处理)。 图像获取(Image Acquisition ) 数字图像的获取是立体视觉的信息来源。常用的立体视觉图像一般为双目图像,有的采用夺目图像。图像的获取方式有很多种,主要有具体运用的场合和目的决定。立体图像的获取不仅要满足应用要求,而且考虑视点差异、光照条件、摄像机的性能和场景特点等方面的影像。 摄像机标定(Camera Calibration ) 图像上每一点的亮度反映了空间物体表面某点反射光的强度,而该点在图像上的位置则与空 间物体表面相应点的几何位置有关。这些位置的相互关系由摄像机成像几何模型来决定。该几何模型的参数称为摄像机参数,这些参数必须由实验与计算来确定,实验与计算的过程称为摄像机定标。 立体视觉系统摄像机标定是指对三维场景中对象点在左右摄像机图像平面上的坐标位置 )(111,v u a 和) (r r r v u a ,与其世界空间坐标A (X, Y , Z )之间的映射关系的确立,是实现立体视觉三维模型重构中基本且关键的一步。 特征提取(Feature Acquisition ) 特征提取的目的是获取匹配得以进行的图像特征,图像特征的性质与图像匹配的方法选择有着密切的联系。目前,还没有建立起一种普遍适用的获取图像特征的理论,因此导致了立体视觉研究领域中匹配特征的多样化。像素相位匹配是近二十年才发展起来的一类匹配算法。相位作为匹配基元,本身反映着信号的结构信息,对图像的高频噪声有很好的一直作用,适于并行处理,能获得亚像素级精度的致密视差。但存在相位奇点和相位卷绕的问题,需加入自适应滤波器解决。或者是像素的集合,也可以是它们的抽象表达,如图像的结构、图像的目标和关系结构等。常用的匹配特征主要有点状特征、线装特征和区特征等几种情形。 一般而言,尺度较大的图像特征蕴含较多的图片信息,且特征本身的数目较少,匹配效率高;但特征提取和描述过程存在较大的困难,定位精度也较差。而对于尺度较小的图像特征来说,对其进行表达和描述相对简单,定位的精度高;但由于特征本身数码较多,所包含的图像信息少,在匹配时需要采用较为严格的约束条件和匹配策略,一尽可能的减少匹配歧义和提高匹配效率。总的来说,好的匹配特征应该具有要可区分性、不变性、唯一性以及有效解决匹配歧义的能力。 图像匹配(Image Matching ) 在立体视觉中,图像匹配是指将三维空间中一点A (X, Y , Z )在左右摄像机的成像面1C 和r C 上的像点)(111,v u a 和) (r r r v u a ,对应起来。图像匹配是立体视觉中最重要也是最困难的问题,一直是立体视觉研究的焦点。当空间三维场景经过透视投影(Perspective Projection )变换为二维图像时,同一场景在不同视点的摄像机图像平面上成像会发生不同程度的扭曲和变形,而且场景中的光照条件、被测对象的几何形状和表面特性、噪声干扰和畸变、摄像机特性等诸多因素的影响都被集中体现在单一的图像灰度值中。显然,要包含了如此之多不利因素的图像进行精准的匹配是很不容易的。
双目立体视觉 双目立体视觉的研究一直是机器视觉中的热点和难点。使用双目立体视觉系统可以确定任意物体的三维轮廓,并且可以得到轮廓上任意点的三维坐标。因此双目立体视觉系统可以应用在多个领域。现说明介绍如何基于HALCON实现双目立体视觉系统,以及立体视觉的基本理论、方法和相关技术,为搭建双目立体视觉系统和提高算法效率。 双目立体视觉是机器视觉的一种重要形式,它是基于视差原理并由多幅图像获取物体三维几何信息的方法。双目立体视觉系统一般由双摄像机从不同角度同时获得被测物的两幅数字图像,或由单摄像机在不同时刻从不同角度获得被测物的两幅数字图像,并基于视差原理恢复出物体的三维几何信息,重建物体三维轮廓及位置。双目立体视觉系统在机器视觉领域有着广泛的应用前景。 HALCON是在世界范围内广泛使用的机器视觉软件。它拥有满足您各类机器视觉应用需求的完善的开发库。HALCON也包含Blob分析、形态学、模式识别、测量、三维摄像机定标、双目立体视觉等杰出的高级算法。HALCON支持Linux和Windows,并且可以通过C、C++、C#、Visual Basic和Delphi 语言访问。另外HALCON与硬件无关,支持大多数图像采集卡及带有DirectShow和IEEE 1394驱动的采集设备,用户可以利用其开放式结构快速开发图像处理和机器视觉应用软件。 一.双目立体视觉相关基本理论说明 1.1 双目立体视觉原理 双目立体视觉三维测量是基于视差原理,图1所示为简单的平视双目立体成像原理图,两摄像机的投影中心的连线的距离,即基线距为b。摄像机坐标系的原点在摄像机镜头的光心处,坐标系如图1所示。事实上摄像机的成像平面在镜头的光心后,图1中将左右成像平面绘制在镜头的光心前f处,这个虚拟的图像平面坐标系O1uv的u轴和v轴与和摄像机坐标系的x轴和y轴方向一致,这样可以简化计算过程。左右图像坐标系的原点在摄像机光轴与平面的交点O1和O2。空间中某点P在左图像和右图像中相应的坐标分别为P1(u1,v1)和P2(u2,v2)。假定两摄像机的图像在同一个平面上,则点P图像坐标的Y坐标相同,即v1=v2。由三角几何关系得到: 上式中(xc,yc,zc)为点P在左摄像机坐标系中的坐标,b为基线距,f为两个摄像机的焦距,(u1,v1)和(u2,v2)分别为点P在左图像和右图像中的坐标。 视差定义为某一点在两幅图像中相应点的位置差: 图1 双目立体成像原理图图3 一般双目立体视觉系统原理图