运动控制系统
技
术
报
告
扬州市职业大学机电、电气、汽检代表队
2012年08月
目录
第一章竞赛背景及要求 (1)
1.1 系统研究背景 (1)
1.2 运动控制项目竞赛要求 (1)
第二章系统总体方案 (3)
第三章硬件系统技术方案 (5)
3.1 机械系统设计 (5)
3.1.1 机械系统结构 (5)
3.1.2 机械系统元件清单 (6)
3.2 电气系统设计 (6)
3.2.1 接近开关选型 (6)
3.2.2 变频器选型 (7)
3.2.3 变压器的选择与连接 (9)
3.2.4 三相电机选型 (9)
3.2.5 伺服放大器选型 (9)
3.2.6 伺服电机选型 (10)
3.2.7 PLC选型 (10)
3.2.8 人接界面选型 (11)
3.2.9 系统电路设计与安装 (11)
3.2.9 电气元件清单 (13)
第四章系统软件技术方案 (14)
4.1 PLC软件设计 (14)
4.1.1 程序流程图 (14)
4.1.2 软元件说明 (14)
4.1.3 梯形图设计 (15)
4.2 GOT软件设计 (15)
4.2.1 软元件分配 (15)
4.2.2 GOT画面设计和操作 (15)
第五章系统调试 (18)
5.1 调试一般准则 (18)
5.1.2 调试前准备 (18)
5.1.3 调试前的检查 (19)
5.1.4 调试的一般顺序 (19)
5.2 机械系统调试 (19)
5.3 电气系统调试 (20)
第六章总结 (21)
参考文献 (22)
致谢 (23)
附录 (24)
附录A 电器元件清单 (24)
附录B 模糊控制表 (25)
附录C 软元件表 (26)
附录D 梯形图 (27)
第一章竞赛背景及要求
1.1 系统研究背景
加强学生创新意识、合作精神、实践能力培养,是当前高等教育教学改革的重要内容之一。以竞赛为载体,推动大学生的课外科技活动,将对深入开展高等学校教学改革,促进学生基础知识教育与综合能力培养、理论与实践的有机结合等方面起到积极地推动作用。为此,三菱电机自动化(中国)有限公司与中国各高校合作共同发起,每年开展一次面向高校在校学生(包括本科生、研究生和高职生)的科技竞赛活动——“三菱电机自动化杯”大学生自动化大赛,为优秀人才脱颖而出创造条件。
2012年“第六届“三菱电机自动化杯”大学生自动化大赛,下设过程控制和运动控制两个项目。
1.2 运动控制项目竞赛要求
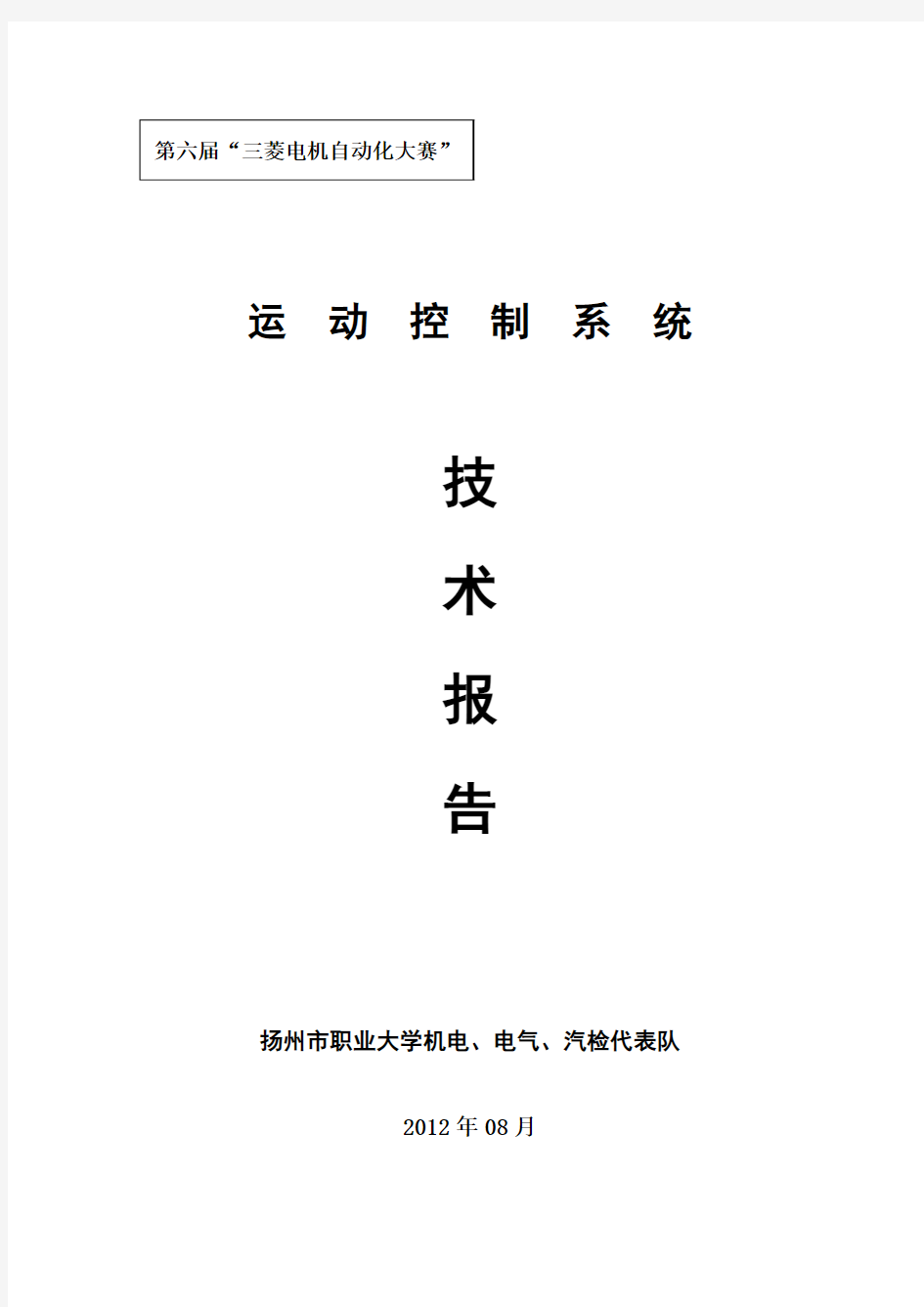
本控制方案依据2012年“第六届“三菱电机自动化杯”大学生自动化大赛实施方案的要求命制。用自带设备安装调试由两台伺服电动机及一台变频电机驱动的运动控制系统。
1、系统配置:PLC(含定位模块或运动控制CPU)、伺服驱动器、触摸屏、伺服电动机(两台)、变频器和三相异步电动机。
2、系统连接:从工作台的电源板用安全插线引出电源到电源端子排。
3、基本控制要求:系统工作时,在工作盘放入磁钢(工作盘是由交流变频器控制;磁钢大小Φ8),当工作盘转动时,XY十字工作台的X轴下部安装的传感器须一直能够对应磁钢(XY轴随动,传感器保持检测到磁钢而不脱开,如果脱开即告失败),从A点开始,即从A磁钢开始,传感器跟随A点磁钢转动一圈后,移动到下一磁钢B点,以此类推…
4、发挥部分:工作盘上放有A、B、C三个磁钢(在不同的半径上),由触摸屏设定要跟随的磁钢,工作盘转动过程中变频器的频率在10Hz~35Hz手动调节,
XY轴必须一直跟随指定的磁钢。
定位系统模型见图1-1。
图 1-1 定位系统示意图
第二章系统总体方案
根据2012年第六届“三菱电机自动化杯”大学生自动化大赛暨自动化系统应用竞赛运动控制项目示意图和任务书,设计完成了定位、追踪运动控制系统。
依据本次大赛过程控制系统任务书所提控制要求,完成该任务需要用到的主要电气设备有:GOT、PLC、变频器、伺服放大器、伺服电机、三相交流电机、限位开关、开关电源其它低压电器设备。
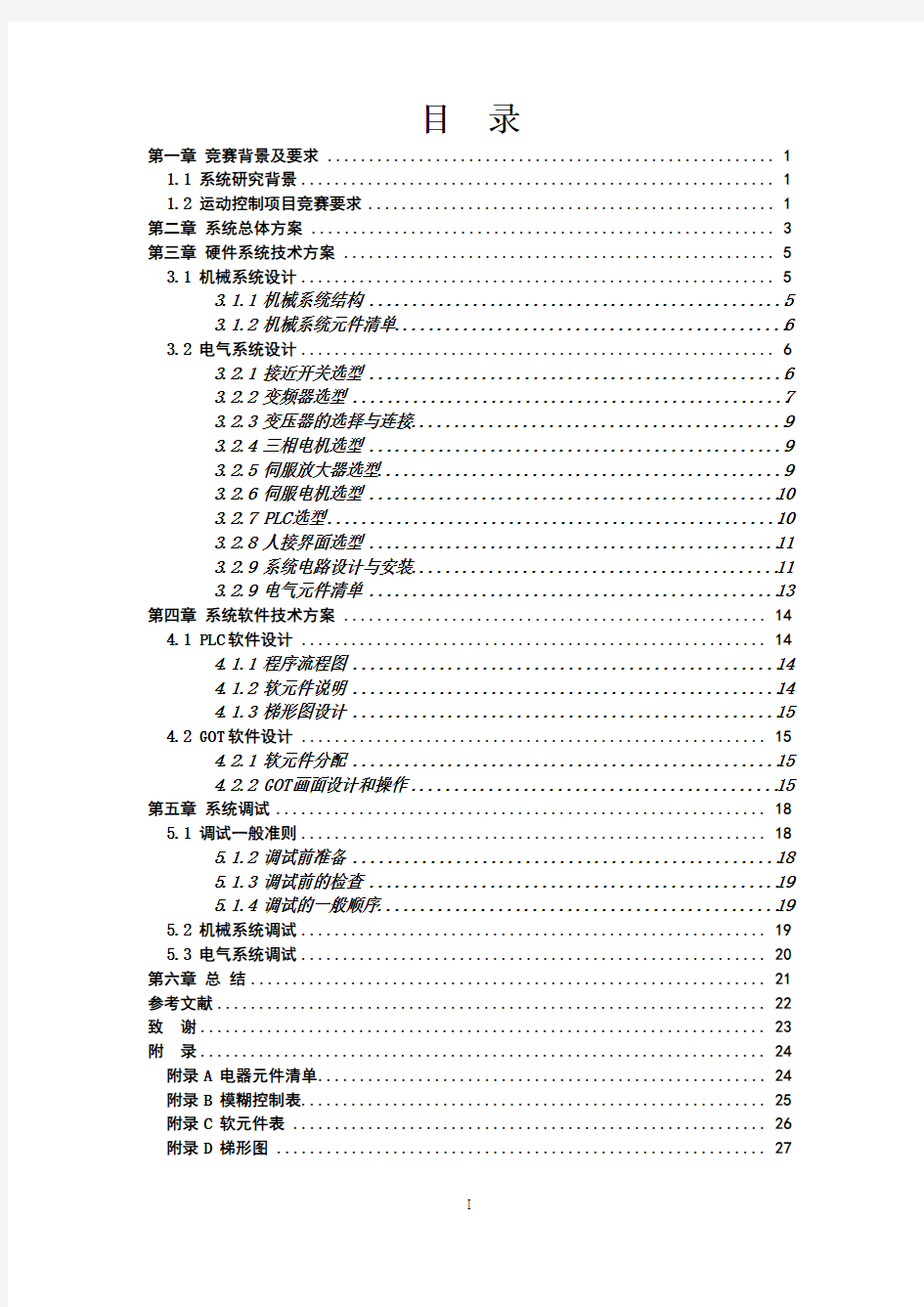
运动控制系统框图如图 2-1 所示。
图 2-1 运动控制系统框图
根据大赛组委会运动控制方案要求,设计运动控制方案如下:
1、手动控制
手动控制是根据GOT手动控制画面相应操作,控制定位笔在X、Y轴上运动,用于机械结构的调试。
2、自动控制
在自动控制模式下,系统启动后定位笔回归原点,原点回归标志接通。用户通过GOT设定变频器的输出频率,PLC通过C-Clink通信模式与变频器通信,将控制信息传送给变频器,变频器按照相应输入控制三相电机的运转。在电机运转的同时,PLC通过伺服控制器控制定位笔在X轴上左右往复运动,寻找磁钢。在寻到磁钢的同时,GOT上的追踪指示灯点亮,伺服控制器控制定位笔追踪小磁钢。
3、追踪控制方案
本系统追踪过程中,反馈信号为开关信号,因此追踪控制过程运用开环控制。
追踪过程中,定位笔运动的速度与变频器驱动转盘的速度无确切的函数关系。因此定位笔的速度有模糊控制表确定,模糊控制表见附录B。
第三章硬件系统技术方案
3.1 机械系统设计
3.1.1 机械系统结构
运动控制系统的机械结构,主要由多功能工作台面、支架、XY十字工作台、旋转工作台四部分组成。
一、多功能工作台面
多功能工作台面长1000cm、宽720cm。用于固定十字工作台支架和旋转工作台支架。
二、型材支架
型材支架分为十字工作台支架和旋转工作台支架。
1.十字工作台支架的四只脚之间组成长630cm、宽480cm的长方形,固定在多功能工作台面的左上方。支架上方固定着十字工作台。
2.旋转工作台支架
旋转工作台支架固定在多功能工作台面上,上方固定着由于固定电机的固定板。
三、XY十字工作台
XY十字工作台由伺服电机控制,考虑到机械强度的问题,Y轴有两个平行轴固定,其中左侧的为主动驱动轴,右侧为从动轴。且Y轴两端装有行程开关,限定X轴左右运动范围;X轴平面装有霍尔传感器;下方为旋转工作台,工作盘由交流电机(电机的速度由变频器控制)带着转动。
四、旋转工作台
旋转工作台由多孔工作盘和电机组成。多孔工作盘固定在电机(型号中大电机51K4OGN-S
,自带减速箱)转轴上,电机通过固定板,固定在旋转工作台支架
3
上。
实物图参看图3-1。
图 3-1 传动系统实物图
3.1.2 机械系统元件清单
机械系统元件清单见表3-1
表3-1 机械系统元件清单
3.2 电气系统设计
3.2.1 接近开关选型
一、接近开关选择
选用霍尔接近开关。霍尔元件是一种磁敏元件。利用霍尔元件做成的开关,叫做霍尔开关。当磁性物件移近霍尔开关时,开关检测面上的霍尔元件因产生霍尔效应而使开关内部电路状态发生变化,由此识别附近有磁性物体存在,进而控制开关的通或断。
二、霍尔接近开关的连接
霍尔接近开关的连接见图 3-2.
图 3-2 接近开关连接图
3.2.2 变频器选型
一、变频器选型
由于实验室器材限制,变频器选用三菱FR-A700系列。
二、变频器设置
变频器的连接采用NET(网络)运行模式,变频器外接C-Clink通信模块和可编程逻辑控制器的C-Clink模块连接,将终端电阻开关设置成100Ω,连接电缆是C-Clink专用电缆,链接方便通讯简单,而且可以链接多台变频器,为后期硬件改善留有余量。变频器C-Clink通信模块和PLC的C-Clink模块端子连接,见图3-3。
变频器的连接步骤:1、确认连接方法,2、准备接线,3、断开可编程逻辑控制器的电源,4、连接(仅FXon-485ADP)电源,5、通讯设备之间的接线,6、连接终端电阻,7、连接屏蔽线。
图3-3 C-Clink通信模块连接
三、变频器的参数设置
本系统设计不需要改变电机转矩控制,位置控制,对于速度控制如果用改变电压来控制电机的转速会因电流增大而使电机发热、烧坏,因此保持输出电压和频率的比率恒定的方式就是采用V/F控制模式,采用V/F控制对电机的要求比较少,通用性比较好,适用低速调整。其他方式在本系统中,没有被采用,采用V/F控制就满足本系统的要求。
1、确认运行的现实以及运行模式的显示:确定已是停止运行状态。
2、设定为参数设定模式:按下MODE键后,设置为参数设定模式。
3、输入参数:转动M拨盘,对准P79,按下SET键,转动M拨盘,将设定直改为6,按下SET,完成输入参数。
4 、完成输入:按照步骤3,将表 3-2中的数据全部输入变频器,完成变频器的参数设定。
表3-2 变频器参数设定表
3.2.3 变压器的选择与连接
因选用FR-A700型变频器,额定输入 3PH AC200~220V。而赛场提供电源为AC 3PH 380V所以应选用变压器,变压器输入三相380V,输出为三项200V。
连接方式为进线端连接赛场提供三相电源,出线端连接变频器。
3.2.4 三相电机选型
将水泵接到变频器的输出端子U、V、W输出端子即可。
3.2.5 伺服放大器选型
伺服放大器也叫伺服控制器,是控制伺服电机转速的控制器。本系统采用MR-J3-10A,MR-J3系列伺服放大器配有USB通用接口可方便和PC机的通讯,通讯速度快,实时采集数据的能力非常强。
运动控制系统中伺服放大器与PLC定位模块(QD75P2N模块)用专用电缆连接。两伺服放大器分别于定位模块的A轴和B轴。详细链接见图3-4。
图3-4 伺服放大器连接图
3.2.6 伺服电机选型
伺服电机有两根外置电缆线,一根是电源线,将电源线连接到伺服放大器的U、V、W端,另外一根是链接伺服放大器的编码线CN3;编码线连接到伺服放大器的CN2接口。
3.2.7 PLC选型
一、PLC的选用
选用三菱Q系列PLC,硬件配置见表3-4。
表3-4 PLC硬件配置表
二、PLC的连接
PLC可直接连接到电脑进行通讯,GOT也可以直接连接到电脑通讯,但是这样会比较麻烦,有一种直接通讯方式,可通过一根USB电缆线连接到GOT,可经由GOT进行工控设备的编程与安装、调试,无需打开控制柜、更换电缆等麻烦的工作,这种就是透明连接。本系统PLC——GOT——PC的连接参看图3-5。
图3-5 透明接线图
PLC外界输入输出信号及地址分配及电路连接PLC请参表3-5输入输出端口分配表和图3-7 PLC连接图。
表 3-5 I∕O端口分配
3.2.8 人接界面选型
人机界面选用三菱GT1155-QSBD-C,通过专用电缆和PLC链接。
3.2.9 系统电路设计与安装
系统原理图参看图3-6,主电路由一个空气开关保护,三相线下面连接变压器,变压器连接变频器,由变频器控制水泵转速大小,实现液位、流量、压力控制。另一项由220V连接 PLC、GOT、开关电源以及调压模块。变频器和各传感器由PLC进行控制的,开关电源是为各传感器提供24V而采用的。系统电气控制柜安装布置图参看图3-7。
图 3-6 电气控制原理图
12
图3-7 系统安装布置图3.2.9 电气元件清单
电气元件清单见附录A。
第四章系统软件技术方案4.1 PLC软件设计
4.1.1 程序流程图
系统控制流程图见图4-1。
图4-1 系统控制程序流程图
4.1.2 软元件说明
软元件说明见附录C
4.1.3 梯形图设计
详细梯形图见附录D。
4.2 GOT软件设计
GOT的画面编辑是通过GT Desinger2进行编辑,操作简单,可自行编辑画面,亦可自行美化画面。程序通过USB电缆线进行下载设计画面。本系统设计了4个画面包括:欢迎画面、系统启动画面、手动模式画面、自动模式画面。
4.2.1 软元件分配
软元件分配见表4-2。
表4-2 GOT软元件分配表
4.2.2 GOT画面设计和操作
GOT的画面编辑是通过GT Desinger2进行编辑,操作简单,可自行编辑画面,亦可自行美化画面。程序通过USB电缆线进行下载设计画面。本系统设计了4个画面包括:欢迎画面、操作画面、手动画面和自动画面。
GOT上电启动后,首先进入的是欢迎界面,如图4-2。
图 4-2欢迎画面
点击按钮,可进入操作画面,如图4-3。
图 4-3 操作画面
在操作画面中点击或按钮,可分别进入手动控制画面和自动控制画面,如图4-4,图4-5。在手动控制画面和自动控制画面中可进行相应的操作控制。
图4-4 手动控制画面
图4-5 自动控制画面
第五章系统调试
5.1 调试一般准则
5.1.1 调试的基本任务
为了实现生产机械的工作任务以及达到规定的静态、动态性能指标,必须在系统安装竣工并经质量检验合格后,进行认真细致的调试工作。这是确保系统安全可靠、合理进行的必要手段。为此,应做到以下几方面要求。
按技术文件及图纸对各单体设备、附属装备进行外观检查,关键尺寸检查,装配质量及部件互换性检查,接线检查,绝缘试验等常规的检验,以发现整个系统的设备及附件在经过长途搬运、仓库保管以及安装过程中有无损坏、差错或其他隐患。找出并核对系统中各电源装置的极性、相序以及各单元之间的正确连接关系。将所有保护装置均按设计要求进行整定。对每一单元进行特性测定、调整、试验,使其工作在最合理的工作状态——达到满意的技术指标。通过调试,使得整个系统获得较为理想的静态特性和动态指标。验证在各种状态下,系统工作的可靠性,以及各种事故状态下保护装置的可靠性。通过调试,校核设计文件的正确性及提供修改设计的必要依据。
5.1.2 调试前准备
1、应具备完整的设计图纸、说明书(包括有关计算)以及主要设备的技术文件;
2、应编制详尽的系统调试大纲,明确规定各单元、各环节以及整个系统的调试步骤、操作方法、技术指标;
3.、应挑选对本系统有一定了解的人员和电工参加调试工作,必要时可邀请有关设计人员、技术人员参加调试;
4、除一般常用的仪器、仪表、工具、器材、备品、配件等应齐备完好外,还应准备好被调试系统所需的专用仪器和仪表,如双踪示波器等;
5、为确保调试安全顺利进行,应具有可切断全部电源的紧急总开关,并认真考虑调试时的各种安全措施。
现代运动控制已成为电机学,电力电子技术,微电子技术,计算机控制技术,控制理论,信号检测与处理技术等多门学科相互交叉的综合性学科。课上老师简单介绍了运动控制及其相关学科的关系,随着其他相关学科的不断发展,运动控制系统也在不断发展,不断提高系统的安全性,可靠性,在课上跟随老师的思路,使我对运动控制系统有了更深刻的理解。 运动控制系统也叫做电力拖动控制系统。运动控制系统的任务是通过对电动机电压,电流,频率等输入电量的控制,来改变工作机械 的转矩,速度,位移等机械量,使各种机械按人们期望的要求运行以满足生产工艺及其他应用的需要。工业生产和科学技术的发展对运动控制系统提出了日益复杂的要求,同时也为研制和生产各类新型的控制装置提供了可能。在前期课程控制理论、计算机技术、数据处理、电力电子等课程的基础上,学习以电动机为被控对象的控制系统,培养学生的系统观念、 运动控制系统的基本理论和方法、初步的工程设计能力和研发同类系统的能力。 课堂上老师全面、系统、深入地介绍了运动控制系统的基本控制原理、系统组成和结构特点、分析和设计方法。 运动控制内容主要包括直流调速、交流调速和伺服系统三部分。 直流调速部分主要介绍单闭环、双闭环直流调速系统和以全控型功率器件为主的直流脉宽调速系统等内容;交流调速部分主要包括基于异步电动机稳态模型的调速系统、基于异步电动机动态模型的高性能调速系统以及串级调速系统;随动系统部分介绍直、交流随动系统的性能分析与动态校正等内容。此外,书中还介绍了近几年发展起来的多电平逆变技术和数字控制技术等内容。《运动控制系统》既注重理论基础,又注重工程应用,体现了理论性与实用性相统一的特点。书中结合大量的工程实例,给出了其仿真分析、图形或实验数据,具有形象直观、简明易懂的特点。 第一部分中主要介绍直流调速系统,调节直流电动机的转速有三种方法:改变电枢回路电阻调速阀,减弱磁通调速法,调节电枢电压调速法。 变压调速是是直流调速系统的主要方法,系统的硬件结构至少包含了两部分:能够调节直流电动机电枢电压的直流电源和产生被调节转速的直流电动机。随着电力电子技术的发展,可控直流电源主要有两大类,一类是相控整流器,它把交流电源直接转换成可控直流电源;另一类是直流脉宽变换器,它先把交流电整流成不可控的直流电,然后用PWM 方式调节输出直流电压。本章说明了两类直流电源的特性和数学模型。当用可控直流电源和直流电动机组成一个直流调速系统时,它们所表现车来的性能指标和人们
1、计算机控制系统的基本框图,并说明各部分的工作。 2、计算机控制系统的典型形式有哪些?说明其优缺点。 ①操作指导控制系统 优缺点:结构简单,控制灵活安全,特别适用于未摸清控制规律的系统,常常被用于计算机控制系统研制的初级阶段,或用于试验新的数学模型和调试新的程序等,由于最终需要人工操作,故不适用于快速过程的控制。 ②直接数字控制系统 优缺点:DDC系统中的计算机参加闭环控制过程,它不仅能完全取代模拟调节器,实现多回路的PID调节,而且不需要改变硬件,只需要通过改变程序就能实现多种较复杂的控制规律,如串级控制、前馈控制、非线性控制、自适应控制、最优控制等。 ③监督计算机控制系统 优缺点:SCC能进行最优控制、自适应控制等,并能完成某些管理工作。SCC 出现故障时,下级仍可继续执行控制任务。 ④分级计算机控制系统 优缺点:功能分散,用多台计算机分别执行不同的控制功能,既能进行控制又能实现管理。 3、计算机监督系统SCC中,SCC计算机的作用? 在SCC系统中计算机根据工艺参数和过程参量检测值,按照所设计的控制算法进行计算,计算出最佳设定值直接传送给常规模拟调节器或者DDC计算机,最后由模拟调节器或DDC计算机控制生产过程。 4、DDC系统的最大优点是什么? DDC最大的优点是从参数的采集、传输到控制等各个环节采用数字控制功能来实现。 5、计算机与外部的通信方式分为哪两种,区别是什么?各自的特点?
并行通信和串行通信 并行通信,传送速度快、信息率高。并且,通常只要提供二条控制和状态先,称为握手信号线,就能完成CPU 和接口设备之间的协调、应答,实现异步传输。不适合长距离、多数位的传送。 串行通信,数据按位进行传送的。在传输过程中,每一位数据都占据一个固定的时间长度,一位一位的串行传送和接受。 6、串行通信从数据传输方向来分,分为哪两种?说明各自的特点? 全双工和半双工方式 全双工,有二根数据线,串行接口可以同时输入和输出数据,计算机可同时发送和接受数据。传输效率高 半双工,串行接口和外围设备间除公共地线外,只有一根数据传输线,某一时刻数据只能一个方向传送。信息传输效率低些。 7、串行通信从数据格式来分,分为哪两种?说明各自的特点? 同步通信和异步通信 同步通信,将许多字符组成一个信息组,通常称为信息帧。在每帧信息的开始加上同步字符,接着字符一个接一个地传输(在没有信息要传输时,要填上空字符) 异步通信,每个字符在传输时,由一个“1”跳变到“0”的起始位开始,其后是5到8个信息位(也称字符位),信息位由低到高排列,即第一位为字符的最低位,最后一位为字符的最高位。其后是克选择的奇偶校验位,最后为“1”的停 止位,停止位为1位,2 11位或者2位。如果传输完一个字符位后立即传输下一个字符,那么后一个字符的起始位就紧挨着前一个字符的停止位了。字符传输前,输出线为“1”状态,称为标识态,传输一开始,输出线状态由“1”变为“0”状态,作为起始位。传输完一个字符之后的间隔时间输出线又进入标识态。 8、I/O 信号的种类。 数据信息、状态信息、和控制信息类 9、设置I/O 接口电路的必要性 ①解决主机CPU 和外围设备之间的时序配合和通信联络问题
11级电气工程与自动化专业《运动控制系统》基本要求(2014-05-23) 第一章 绪论 了解本课程的研究内容。 第二章 (转速单)闭环控制的直流调速系统 1、 了解V (SCR )--M 、PWM--M 两种主电路方案及其特点(2.1节、P16、P97--98、笔记); 2、 他励(或永磁)直流电动机三种数学模型及转换,解耦模型中I do ~U d 环节的处理(P27--28、笔记); 3、 稳态性能指标中D 、S 间关系及适用范围(2.2.1节、P29--30、笔记); 4、 转速单闭环直流调速系统组成原理、特点及适用范围(P2 5、笔记); 5、 带电流截至负反馈的转速单闭环直流调速系统的组成原理、特点(笔记、2.5.2节)。 第三章 转速、电流反馈控制的直流调速系统 1、 双闭环直流调速系统的组成原理(主要指:V —M 不可逆调速系统、PWM-M 调速系统)、特点,符合实际的系统数学模型,静(稳)态参数的整定及计算(P60、P59--6 2、笔记); 2、 ASR 、ACR 的作用(P65); 3、 典1、典2系统的特点、适用范围、参数整定依据(3.3.2节、笔记); 4、 基于工程设计法的ASR 、ACR 调节器参数整定方法(P77--78、3.3.3节、例3-1、3-2、笔记); 5、 理解ASR 退饱和时的(阶跃响应)转速超调量等时域指标算式(P86--88、笔记); 6、 系统分别在正常恒流动态、稳态阶段,及机械堵转故障、转速反馈断开故障下的(新稳态)物理量计算; 7、 M 、T 、M/T 三种数字测速方法及特点(2.4.2节、笔记); 8、 了解了解M/T 数字测速的技术实现方法、系统控制器的技术实现方法(P82-85、笔记)。 第四章 可逆控制和弱磁控制的直流调速系统 1、 PWM--M 可逆直流调速系统组成原理及特点(4.1节,笔记) 2、 V (SCR )--M 可逆主电路中的环流概念、类型、特点(P103--104、笔记); 3、 常用的晶闸管-直流电动机可逆调速系统组成原理及特点(4.2.2节,图4-1 4、图4-1 5、4.2.3节)。 第五章 基于稳态模型的异步电动机调速系统 1、 异步电动机定子调压调速的机械特性簇与特点,转速闭环调压调速系统组成原理及适用范围(5.1--5.2节); 2、 软起动器的作用及适用条件(5.2.4节); 3、 异步电动机变压变频调速的基本协调控制关系(一点两段)及其依据(5.3.1节); 4、 异步电动机四种协调控制的特点,各自的机械特性簇、特点及比较(5.3.2节--5.3.3节、笔记); 5、 SPWM 、CFPWM 、SVPWM 变频调速器组成原理与特点,及其中各环节的作用(5.4节); 6、 了解基于转差频率控制的转速闭环变频变压调速系统的基本原理(5.6节)。 第六章 基于动态模型的异步电动机调速系统 1、 交流电动机坐标变换的作用,矢量控制(VC )的基本思想、特点(6.6、6.7、笔记); 2、 异步电动机VC 系统的一般组成原理(图6-20); 3、 了解各种具体的VC 系统组成方案,理解转子磁链直接与间接定向控制的区别(6.6. 4、6.6.6节、笔记); 4、 异步电动机直接转矩控制(DTC )系统的基本原理及特点(6.7.3节),DTC 与VC 的比较(6.8节)。 第七章 绕线转子异步电动机双馈调速系统 1、 绕线转子异步电动机次同步串级调速主电路及其工作原理,()S f β=公式及特点(7.2.1节、笔记); 2、 绕线转子异步电动机双闭环次同步串级调速系统组成原理;起动、停车操作步骤;(7.5、7.6、7.4.3节、笔记)。 第八章 同步电动机变压变频调速系统 1、 正弦波永磁同步电动机(PMSM )矢量控制系统组成原理,0sd i =时的转矩公式(8.4.3节); 2、 具有位置、速度闭环的正弦波永磁同步电动机(伺服)矢量控制系统组成原理(图8-26、27扩展、笔记)。 第九章 伺服系统 1、 位置伺服系统的典型结构(开环、半闭环、闭环、混合闭环)及特点(笔记、9.1.2); 2、 位置伺服系统的三种运行方式、位置伺服系统的三种方案;(笔记、9.3.2--9.3.4) 3、 数字伺服系统中电子齿轮的作用(笔记); 4、 数字式位置、速度伺服系统的指令形式(笔记)。 *** 考试须知---要点提示: (1)无证件者不能考试;(2)未交卷者中途不得离场;(3)严禁带手机到座位,操作手机者按作弊论处。 附:答疑地点(2-216)、时间:(1)2014-6-6,13:00--15:00;(2)2014-6-7,8:00--11:00,13:00--15:00。
湖南科技大学测控技术与仪器专业专业综合实验报告 姓名 学号 成绩 湖南科技大学机电工程学院 二0—三年 ^一月 ^一日目录 一、液压泵站综合控制实验 3 (一)实验目的 3 (二)实验内容 3 二、液压实验台PLC控制实验 4 (一)实验目的 4 (二)实验内容 4 —振动测试与故障诊断综合实验( 一) 一)实验目的 5 二)实验内容 5 四.振动测试与故障诊断综合实验(二)(一)实验目的 6 (二)实验内容 6 五.基于虚拟仪器的自动控制原理综合实验(一)实验目的7 (二)实验内容7 六.基于虚拟仪器的传感器综合实验8 (一)实验目的8 (二)实验内容8 七.地震仪器综合设计9 (一)实验目的9 (二)实验内容9 八.电法仪器综合设计10 (一)实验目的10 (二)实验内容10 九、实验心得11 一、液压泵站综合控制实验 (一)实验目的 了解液压控制的装置,熟悉PLC编程,并且了解 置的原理并且用于实践生活中去。(二)实验内容 此实验是液压的测量实验用PLC处理器控制来实现,液压PLC综合控制实验室是我公 司根据高校机电一体化对气、电、液控制的教学大纲要求,在我公司专利产品YY-18透明 液压传动演示系统的基础上,综合了我公司气动PLC与液压PLC控制实验设备的优点,采 用了开放型综合实验台结构,广泛征求专家教授与老师的意见,经不断创新改进研制而成的。是目前集气动控制技术、液压传动控制技术以及PLC可编程序控制器控制技术于一体 的理想的综合性实验设备。实验时,它们可以相互辅成,交叉控制。可以让学生直观、感性地对比、了解气、电、液各自具有的特点、特色、及优缺点等。 信号采集电路原理设计: (1)前置放大电路要求有阻抗匹配设计(前置放大器采用集成运放OP07、 采用电压负反馈设计、增益为10、50 两档手动设计) (2)主放大器采用级联组合程控放大、增益动态范围为10 至1500 倍之内。 (增益程档位要求有30 至40 梯度之内,具体每档增益值不做具体要求但要求梯度 增益呈线性) (3)主放大器末端输出值(Up-p)设计为5v,如有溢出则在设计说明中明。 PLC控制在工业领域的发展。理解液压装
运动控制系统实验报告 专业班级 学号 姓名 学院名称 运动控制仿真实验报告 一、实验内容与要求 1.单闭环转速负反馈 2.转速电流双闭环负反馈
3.晶闸管相控整流双闭环直流调速系统仿真模型搭建 具体要求:针对1 2 (1)仿真各环节参数 (2)仿真模型的建立 (3)仿真结果,分为空载还是负载,有无扰动 (4)仿真结果分析 二、Simulink 环境下的仿真 1.单闭环转速负反馈 1.1转速负反馈闭环调速系统仿真各环节参数 直流电动机:额定电压N U =220V ,额定电流dN I =55A ,额定N n =1000r/min ,电动机电动 势系数e C =0.192V ·min/r 。 假定晶闸管整流装置输出电流可逆,装置的放大系数s K =44,滞后时间常数 s T =0.00167s 。 电枢回路总电阻R=1.0Ω,电枢回路电磁时间常l T =0.00167s ,电力拖动统机电时间 常数m T =0.075s 。 转速反馈系数α=0.01V ·min/r 。 对应额定转速是的给定电压 n U =10V 。
1.2仿真模型的建立 图1-1单闭环转速负反馈直流调速系统的仿真模型 PI 调节器的值定为 =0.56, = 11.43。 图1-2单闭环转速负反馈直流调速系统加入扰动负载时的仿真模型 1.3仿真结果 p K 1
图1-3空载启动不加扰动转速和电流波形 图1-4空载启动加负载扰动转速和电流波形 1.4仿真结果分析 (1)空载启动无扰动:由空载启动不加扰动转速和电流波形可知,当 =0.56, = 11.43。系统转速有较大的超调量,但快速性较好的。空载启动电流的最大值有230A 左右,而额定电流 dN I =55A ,远远超过了电动机承受的最大电流。 (1)空载启动加负载扰动:由空载启动加负载扰动转速和电流波形可知,在空载启动1S 后加负载扰动,在1S 到1.5S 时间段,转速和电流有明显的下降,但系统马上进行了调节。 p K 1
精心整理 二、填空题 1.PWM控制技术包括单极性控制和双极性控制两种方式。 2.反馈控制系统的作用是:抵抗扰动,服从给定。 3.静态环流可以分为直流平均环流和瞬时脉动环流。 4.PWM逆变器根据电源类型不同可以分为电压型和电流型。 5.直流电动机电枢的电流由负载决定。 20.V-M系统中,采用三相整流电路,为抑制电流脉动,可采用的主要措施是设置平波电抗器. 21.在单闭环调速系统中,为了限制全压启动和堵转电流过大,通常采用电流截止负反馈。22.在无静差的直流调速系统中,I部分的作用是__消除稳态误差____。 23.在α=β配合控制的直流可逆调速系统中,存在的是瞬时脉动环流,可用串接环流电抗器抑制。24.调速系统的稳态性能指标有调速范围、静差率。 25.某直流调速系统电动机的额定转速为n =1430r/min,额定速降为115r/min,要求静差率s≤30%, N 则系统允许的最大调速范围为。
26.转速、电流双闭环调速系统当中,两个调节器采用串联联接,其中转速反馈极性为负、电流反馈极性为负。 27.转速、电流双闭环系统,采用PI调节器,稳态运行时,转速n取决于给定电压、ASR的输出量取决于负载电流。 28.下图为单闭环转速控制系统。 (1)图中V是晶闸管整流器; 是平波电抗器,它的作用是抑制电流脉动和保证最小续流电流; (2)图中L d 37.在两组晶闸管反并联的可逆调速系统中,反转用正组晶闸管实现回馈制动的。 38、交流异步电动机调压调速工作时,其最大转矩随电机电压的降低而降低。 39、恒压频比控制方式是指给异步电动机供电的电压和之频率比为常数。 40、异步电动机变压变频调速控制特性曲线中,基频以下调速称为恒转矩调速,基频以上调速称为恒功率调速。 42、转速、电流双闭环直流调速系统中,对负载变化起抗扰作用的是转速调节器。 43、对于调速系统,最主要的抗扰性能是抗负载扰动和抗电网电压的性能。 44、在调速系统中常用的抗扰性能指标为动态降落和恢复时间。
传感器综合实验报告( 2012-2013年度第二学期) 名称:传感器综合实验报告 题目: 利用传感器测量重物质量院系:自动化系 班级:测控1201 班 小组成员:加桑扎西,黄承德 学生:加桑扎西 指导教师:仝卫国 实验周数:1周 成绩:
日期:2015 年7 月12日
传感器综合实验报告 一、实验目的 1、了解各种传感器的工作原理与工作特性。 2、掌握多种传感器应用于电子称的原理。 3、根据不同传感器的特性,选择不同的传感器测给定物体的重量。 4、能根据原理特性分析结果,加深对传感器的认识与应用。 5、测量精度要求达到1%。 二、实验设备、器材 1、金属箔式应变片传感器用到的设备: 直流稳压电源、双平行梁、测微器、金属箔式应变片、标准电阻、差动放大器、直流数字电压表。 2、电容式传感器用到的设备: 电容传感器、电容变换器、差动放大器、低通滤波器、电压表、示波器。 3、电涡流式传感器用到的设备: 电涡流式传感器、测微器、铝测片、铁测片、铜测片、电压表、示波器。 三、传感器工作原理 1、电容式传感器的工作原理: 电容器的电容量C是的函数,当被测量变化使S、d或 任意一个参数发生变化时,电容量也随之而变,从而可实现由被测量到电容量的转换。电容式传感器的工作原理就是建立在上述关系上的,若保持两个参数不变,仅改变另一参数,
就可以把该参数的变化转换为电容量的变化,通过测量电路再转换为电量输出。 差动平行变面积式传感器是由两组定片和一组动片组成。当安装于振动台上的动片上、下改变位置,与两组静片之间的相对面积发生变化,极间电容也发生相应变化,成为差动电容。如将上层定片与动片形成的电容定为C X1,下层定片与动片形成的电容定为C X2,当将C X1和C X2接入双T型桥路作为相邻两臂时,桥路的输出电压与电容量的变化有关,即与振动台的位移有关。依据该原理,在振动台上加上砝码可测定重量与桥路输出电压的对应关系,称未知重量物体时只要测得桥路的输出电压即可得出该重物的重量。 2、电涡流式传感器的工作原理: 电涡流式传感器由平面线圈和金属涡流片组成,当线圈中通以高频交变电流后,与其平行的金属片上感应产生电涡流,电涡流的大小影响线圈的阻抗Z,而涡流的大小与金属涡流片的电阻率、导磁率、厚度、温度以及与线圈的距离X有关。当平面线圈、被测体(涡流片)、激励源已确定,并保持环境温度不变,阻抗Z只与X距离有关。将阻抗变化经涡流变换器变换成电压V输出,则输出电压是距离X的单值函数。依据该原理可制成电涡流式传感器电子称。3、金属箔式应变片传感器工作原理: 应变片应用于测试时,应变片要牢固地粘贴在测试体表面,当测件受力发生形变,应变片的敏感栅随同变形,其电阻值也随之发生相应的变化。通过测量电路,转换成电信号输出显示。 实验中,通过旋转测微器可使双平梁的自由端上、下移动,从而使应变片的受力情况不同,将应变片接于电桥中即可使双平衡的位移转换为电压输出。电桥的四个桥臂电阻R1、R2、R3、R4,电阻的相对变化率分别为△R1/R1、△
单轴电机运动控制实验报告范文 实验一晶闸管直流调速系统电流-转速调节器调试 一.实验目的 1.熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。2.掌握直流调速系统主要单元部件的调试步骤和方法。 二.实验内容 1.调节器的调试 三.实验设备及仪器 1.教学实验台主控制屏。2.MEL―11组件3.MCL―18组件4.双踪示波器5.万用表 四.实验方法 1.速度调节器(ASR)的调试 按图1-5接线,DZS(零速封锁器)的扭子开关扳向“解除”。 (1)调整输出正、负限幅值“5”、“6”端接可调电容,使ASR调节器为PI 调节器,加入一定的输入电压(由MCL―18的给定提供,以下同),调整正、负限幅电位器RP1、RP2,使输出正负值等于5V。 (2)测定输入输出特性将反馈网络中的电容短接(“5”、“6”端短接),使ASR调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画 图1-5 速度调节器和电流调节器的调试接线图
出曲线。 (3)观察PI特性 拆除“5”、“6”端短接线,突加给定电压(0.1V),用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变数值。 2.电流调节器(ACR)的调试按图1-5接线。 (1)调整输出正,负限幅值 “9”、“10”端接可调电容,使调节器为PI调节器,加入一定的输入电压,调整正,负限幅电位器,使输出正负最大值等于5V。 (2)测定输入输出特性 将反馈网络中的电容短接(“9”、“10”端短接),使调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。 (3)观察PI特性 拆除“9”、“10”端短接线,突加给定电压,用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变数值。 一.实验目的 1.了解双闭环不可逆直流调速系统的原理,组成及各主要单元部件的原理。2.熟悉电力电子及教学实验台主控制屏的结构及调试方法。3.熟悉MCL-18,MCL-33的结构及调试方法
目录 一、课程设计系统概述 (1) 1.1课程设计项目参数 (1) 1.2课程设计要求: (1) 1.3课程设计设计任务 (2) 1.4.稳态分析及参数设计计算 (2) 1.4.1静态参数计算 (2) 1.4.2.动态参数计算 (3) 1.4.3稳定性分析 (4) 1.4.4系统校正 (4) 1.4.5.控制结构图 (5) 二、MATLAB仿真设计 (6) 三、总结 (10) 四、参考文献 (10)
一、课程设计系统概述 1.1课程设计项目参数 1)电动机:额定数据为PN=10kW,UN=220v,IN=52A,nN=1460r/min,电枢电阻RS=0.5Ω,飞轮力矩GD2=10N.m2。 2)晶闸管装置:三相桥式可控整流电路,整流变压器Y/Y联结,二次线电压U2l=230v,触发整流环节的放大系数Ks=40。 3)V-M系统主电路总电阻R=1Ω。 4)测速发电机:永磁式,ZYS231/110型;额定数据为23.1w,110v,0.18A,1800r/min。 5)系统静动态指标:稳态无静差,调速指标D=10,s≤5% 6)电流截止负反馈环节:要求加入合适的电流截止负反馈环节,使电动机的最大电流限制(1.5-2)I N。(选座) 7)给定电压Un*=15V。 1.2课程设计要求: (1)根据题目要求,分析论证确定系统的组成,画出系统组成的原理框图; (2)对转速单闭环直流调速系统进行稳态分析及参数设计计算; (3)绘制系统的动态结构图; (4)动态稳定性判断,校正,选择转速调节器并进行设计; (5)绘制校正后系统的动态结构图; (6)应用MATLAB软件对转速单闭环直流调速系统进行仿真,验证所设计的调节器是否符合设计要求; (7)加入电流截止负反馈环节;(选做) (8)应用MATLAB软件对带电流截至负反馈的转速单闭环直流调速系统进行仿真,完善系统;
《控制系统设计》 重点 一 1. 频谱概念 傅里叶级数的系数表示了各次谐波的幅值和相位,这些系数的集合成为频谱。 2. 线状谱,连续谱 周期信号对其求傅里叶级数,可得到其频谱,周期信号的频谱是离散的; 非周期信号一般可视为T →∞的周期信号,对其取傅氏变换得到频谱,一般来说,其频谱是连续的。非周期信号可以进行周期延拓,这时它的频谱就是对应周期信号的频谱的包络线,但幅值有可能不同。 3. 典型频谱特性(阶跃谱,常值谱,脉冲谱,余弦谱) 脉冲信号的频谱是一常值A 且包含所有的频率,频谱丰富。 余弦谱若输入为t A 1cos ω,则其线谱为 -1δ处的两个f f ±=函数(脉冲函数) 构成,脉冲函数的面积为2A ,即幅值是2A 。 常值谱在所有的频段上均为零,仅在零频率(直流)上有一个-δ函数。 阶跃谱有一个连续变化的部分和一个-δ函数,-δ函数代表直流分量,其他各次谐波构成以连续谱,连续谱随频率增加很快衰减。(P18) 4. 离散,快速傅里叶变换的区别 ①DFT 为离散傅里叶变换,是用数值计算的方法求信号的频谱。其一般公式为: ()()1 -1,0,/2-1 -0 * N k e n f k F N jnk p N n ?==∑=π 对一段给定的信号,在一个周期内取N 个采样点,求其离散傅里叶变换,再除以N 就可得对应的线谱。 求频谱 :将其乘上?t就可以得到所求频谱的值 求线谱 :在一个周期内取N 个采样值,求其离散傅立叶变换,再除以N ②FFT 为快速傅里叶变换,它是为了提高DFT 的计算效率而提出的。对FFT 而言,一般要求时间点数为2的整数次方,即r N 2=。
工业控制计算机实验报告 电气211 宋少杰 2120302078
实验一A/D、D/A 转换实验 一、实验目的 1.了解温控系统的组成。 2.了解NI 测量及自动化浏览器的使用并对数据采集卡进行设置。 3.了解Dasylab 软件的各项功能,并会简单的应用。 4.通过实验了解计算机是如何进行数据采集、控制的。 二、实验设备 微型计算机、NI USB 6008 数据采集卡、温度控制仪、温箱。 三、实验内容 1.了解温度控制系统的组成。 2.仔细观察老师对数据采集卡输入输出任务建立的过程及设置还有dasylab 基本功能 的演示。 3.仔细阅读dasylab 相关文档,了解其基本使用方法。 4.动手实践,打开范例,仔细揣摩,并独立完成数据采集卡输入输出任务的建立并建 立并运行虚拟的AD 及DA 系统,完成之后,按照自己的需要及兴趣搭建几个简单的系统运行。 四、温控系统的组成 计算机温度控制系统由温度控制仪与计算机、数据采集卡一起构成,被控对象为温箱, 温箱内装有电阻加热丝构成的电炉,还有模拟温度传感器A D590。 系统框图如图1-1 所示:
图 1-3 图 1-1系 统框图 五、温控仪基本工作原理 温度控制仪由信号转换电路、电压放大电路、可控硅移相触发器及可控硅加 热电路组成。 被控制的加热炉允许温度变化范围为 0~100℃.集成电路温度传感器 AD590(AD590 温 度传感器输出电流与绝对温度成正比关系,灵敏度为 1uA/K).将炉温的变化转换为电流的变化送入信号转换、电压放大电路.信号转换电路将 AD590 送来的电流信号转换为电压信号, 然后经精密运算放大器放大、滤波后变为 0~5V 的标准电压信号,一路送给炉温指示仪表, 直接显示炉温值。另一路送给微机接口电路供计算机采样.计算机通过插在计算机 U SB 总线 接口上的 N I USB 6008 12 位数据采集卡将传感器送来的 0~5V 测量信号转换成 0~FFFH 的12 位数字量信号,经与给定值比较,求出偏差值,然后对偏差值进行控制运算,得到控制温度 变化的输出量,再经过 N I USB 6008 将该数字输出量经 12 位 D /A 转换器变为 0~5V 的模拟电 压信号送入可控硅移相触发器,触发器输出相应控制角的触发 脉冲给可控硅,控制可控硅的 导通与关断,从而达到控制炉温的目的。 六、思考题 1.数据采集系统差分输入与单端输入有些什么区别?各有什么优缺点? 答: 单端输入的输入信号均以共同的地线为基准.这种输入方法主要应用于输入信号电压较高(高于1 V),信号源到模拟输入硬件的导线较短(低于15 ft),且所有的输入信号共用一个基准地线.如果信号达不到这些标准,此时应该用差分输入。 对于差分输入,每一个输入信号都有自有的基准地线;由于共模噪声可以被导线所消除,从而减小了噪声误差.单端输入时, 是判断信号与 GND 的电压差. 差分输入时, 是判断两个信号线的电压差. 信号受干扰时, 差分的两线会同时受影响, 但电压差变化不大. (抗干扰性较佳) 而单端输入的一线变化时, GND 不变, 所以电压差变化较大(抗干扰性较差)。
自动控制系统实验报告 学号: 班级: 姓名: 老师:
一.运动控制系统实验 实验一.硬件电路的熟悉和控制原理复习巩固 实验目的:综合了解运动控制实验仪器机械结构、各部分硬件电路以及控制原理,复习巩固以前课堂知识,为下阶段实习打好基础。 实验内容:了解运动控制实验仪的几个基本电路: 单片机控制电路(键盘显示电路最小应用系统、步进电机控制电路、光槽位置检测电路) ISA运动接口卡原理(搞清楚译码电路原理和ISA总线原理) 步进电机驱动检测电路原理(高低压恒流斩波驱动电路原理、光槽位置检测电路)两轴运动十字工作台结构 步进电机驱动技术(掌握步进电机三相六拍、三相三拍驱动方法。) 微机接口技术、单片机原理及接口技术,数控轮廓插补原理,计算机高级语言硬件编程等知识。 实验结果: 步进电机驱动技术: 控制信号接口: (1)PUL:单脉冲控制方式时为脉冲控制信号,每当脉冲由低变高是电机走一步;双 脉冲控制方式时为正转脉冲信号。 (2)DIR:单脉冲控制方式时为方向控制信号,用于改变电机转向;双脉冲控制方式 时为反转脉冲信号。
(3)OPTO :为PUL 、DIR 、ENA 的共阳极端口。 (4)ENA :使能/禁止信号,高电平使能,低电平时驱动器不能工作,电机处于自由状 态。 电流设定: (1)工作电流设定: (2)静止电流设定: 静态电流可用SW4 拨码开关设定,off 表示静态电流设为动态电流的一半,on 表示静态电流与动态电流相同。一般用途中应将SW4 设成off ,使得电机和驱动器的发热减少,可靠性提高。脉冲串停止后约0.4 秒左右电流自动减至一半左右(实际值的60%),发热量理论上减至36%。 (3)细分设定: (4)步进电机的转速与脉冲频率的关系 电机转速v = 脉冲频率P * 电机固有步进角e / (360 * 细分数m) 逐点比较法的直线插补和圆弧插补: 一.直线插补原理: 如图所示的平面斜线AB ,以斜线起点A 的坐标为x0,y0,斜线AB 的终点坐标为(xe ,ye),则此直线方程为: 00 00Y Ye X Xe Y Y X X --= -- 取判别函数F =(Y —Y0)(Xe —Xo)—(X-X0)(Ye —Y0)
《运动控制系统》课程设计报告 时间 2014.10 _ 学院自动化 _ 专业班级自1103 _ 姓名曹俊博 __ 学号 41151093 指导教师潘月斗 ___ 成绩 _______
摘 要 本课程设计从直流电动机原理入手,建立V-M双闭环直流调速系统,设计双闭环直流调速系统的ACR和ASR结构,其中主回路采用晶闸管三相桥式全控整流电路供电,触发器采用KJ004触发电路,系统无静差;符合电流超调量σi≤5%;空载启动到额定转速超调量σn≤10%。并详细分析系统各部分原理及其静态和动态性能,且利用Simulink对系统进行各种参数给定下的仿真。 关键词:双闭环;直流调速;无静差;仿真 Abstract This course is designed from DC motor, establish the principles of V-M double closed loop DC speed control system design, the double closed loop dc speed control system and the structure, including ACR ASR the main loop thyristor three-phase bridge type all control the power supply and trigger the rectifier circuit KJ004 trigger circuit, the system without the static poor; Accord with current overshoots sigma I 5% or less; No-load start to the rated speed overshoot sigma n 10% or less. And detailed analysis of the system principle and the static and dynamic performance, and the system of simulink to various parameters set simulation. Key Words:double closed loop;DC speed control system;without the static poor;simulation
HEFEI UNIVERSITY 自动控制原理课程总结 系别电子信息与电气工程系 专业自动化 班级 09自动化(1)班 姓名 完成时间 2011.12.29
自动控制原理课程总结 前言 自动控制技术已广泛应用于制造、农业、交通、航空及航天等众多产业部门,极大地提高了社会劳动生产率,改善了人们的劳动环境,丰富了人民的生活水平。在今天的社会中,自动化装置无所不在,为人类文明进步做出了重要贡献。本学期我们开了自动控制原理这门专业课,下面主要介绍下我对这门课前五章的认识和总结。 一、控制系统的数学模型 1.传递函数的定义: 在线性定常系统中,当初是条件为零时,系统输出的拉氏变换与输入的拉氏变换之比。 (1)零极点表达式: (2)时间常数表达式: 2.信号流图
(1)信号流图的组成 节点:用来表示变量或信号的点,用符号“○”表示。 支路:连接两节点的定向线段,用符号“→”表示。(2)信号流图与结构图的关系 3.梅逊公式
其中:Δ=1-La+LbLc-LdLeLf+...成为特征试。 Pi:从输入端到输出端第k条前向通路的总传递函数 Δi:在Δ中,将与第i条前向通路相接触的回路所在项除去后所余下的部分,称为余子式。 La:所有单回路的“回路传递函数”之和 LbLc:两两不接触回路,其“回路传递函数”乘积之和 LdLeL:所有三个互不接触回路,其“回路传递函数”乘积之和“回路传递函数”指反馈回路的前向通路和反馈通路的传递函数只积并且包含表示反馈极性的正负号。 二、线性系统的时域分 1.ζ、ωn坐标轴上表示如下: (1)闭环主导 极点:
当一个极点距离虚轴较近,且周围没有其他闭环极点和零点,并且该极点的实部的绝对值应比其他极点的实部绝对值小5倍以上。(2)对于任何线性定常连续控制系统由如下的关系: ①系统的输入信号导数的响应等于系统对该输入信号响应的导数; ②系统对输入信号积分的响应等于系统对该输入信号响应的积分,积分常数由初始条件确定。 2.劳斯判据: 设系统特征方程为 : 劳斯判据指出:系统稳定的充要条件是劳斯表中第一列系数都大于零,否则系统不稳定,而且第一列系数符号改变的次数就是系统特征方程中正实部根的个数。 劳斯判据特殊情况的处理 ⑴某行第一列元素为零而该行元素不全为零时——用一个很小的正数ε代替第一列的零元素参与计算,表格计算完成后再令ε→0。 ⑵某行元素全部为零时—利用上一行元素构成辅助方程,对辅助方程求导得到新的方程,用新方程的系数代替该行的零元素继续计算。 3.稳态误差 (1)定义: (2)各种误差系数的定义公式
《运动控制系统》课程教学大纲 大纲执笔人:大纲审核人: 课程编号:0808000555 英文名称:Motion control system 学分:4 总学时:64。其中,讲授54 学时,实验 10 学时,上机 0 学时,实训 0 学时。 适用专业: 自动化 先修课程:自动控制原理、现代控制理论基础、电力电子技术 一、课程性质与教学目的 《运动控制系统》是一门讲授交、直流电动机控制理论和控制规律,以提高电能利用效率及运动控制品质的一门专业主干课程,是自动化专业的一门必修课。其目的是使学生了解并掌握各类交、直流电动机控制系统的基本结构、工作原理和性能指标,着重培养学生对运动控制系统的综合分析能力和工程设计能力,从而掌握现代交、直流电动机的控制理论和系统设计方法,为今后从事专业工作打下扎实的基础。 二、基本要求 本课程秉承理论与实际相结合的理念,应用自动控制理论解决运动控制系统的分析和设计问题,以转矩和磁链(或磁通)控制规律为主线,由简入繁、由低及高地循序深入,论述系统的静、动态性能。通过本课程的学习,要求学生能够了解运动控制系统的定义、结构及其分类,理解运动控制的必要性,掌握单、双闭环直流电动机调速系统、VVVF变频器、交流异步电动机矢量控制系统、正弦波永磁同步电动机调速系统、位置控制系统等的结构与原理、分析与设计方法。 三、重点与难点 1. 课程重点 (1)直流调速系统:以直流电动机为对象组成的运动控制系统,转速单闭环调速系统,转速、电流双闭环控制调速系统的基本组成和控制规律,静态、动态性能分析,直流调速系统的工程设计方法,直流调速系统的数字控制方法。 (2)交流调速系统:异步电动机的稳态模型及基于稳态模型的交流调速系统,异步电动机的动态模型及基于动态模型的高性能交流调速系统,同步电动机变频调速系统。 2、课程难点 (1)双闭环直流调速系统:通过双闭环直流调速系统静、动态模型研究及性能分析,对转速与电流环的典型系统校正,推导PI 控制规律与工程计算方法。 (2)空间电压矢量PWM:从稳态和动态、时域和空间等方面论述矢量、标量、相量的区别与联系,各自的表现形式,基本特征与物理意义。 (3)异步电动机动态数学模型:依据旋转磁场产生原理,论述时间和空间变量的相对关系,讨论静止与旋转(或交变)的关系与转化,理解在各种坐标系下的数学模型。通过计算机数字仿真,分析比较各种物理量在不同坐标系的表现形式和相互间的联系。 (4)矢量控制系统:着重论述按转子磁链定向,定子电流转矩分量和励磁分量的解耦,等效
测控电路实验报告 班级: 学号: 姓名:
实验一运算电路的仿真 一、实验目的 通过使用仿真软件和实验箱,学习并掌握各种运算电路的仿真,并且调试出各种电路的输入输出波形。 二、实验内容 1、积分电路 2 、微分电路 3 、运算放大器积分电路 R1=16K,C1=100nF 4 、运算放大器微分电路 R1=16K, C1=100nF 5、反相加法器 6 、同相加法器 7、减法器电路
三、实验结果 1、积分电路 2、微分电路 3、运算放大器积分电路 4、运算放大器微分电路
5、反向加法器 6、同向加法器 7、减法器电路
实验二A/D 、D/A 转换实验 一、实验目的 1、掌握D/A和A/D转换器的基本工作原理和基本结构; 2、掌握大规模集成D/A和A/D转换器的功能及其典型应用。 二、实验内容 1、A/D转换实验 2、D/A转换实验 图1 所示电路是4 位数字—模拟转换电路。它可将4 位二进制数字信号转换为模拟信号。 R f=26kΩ,R=4kΩ,求当[u1u2u3u4]=[1110]和[u1u2u3u4]=[0010]时,输出电压u0。 三、实验结果 1、A/D转换实验
2、D/A转换实验 被选模拟通道输入 模拟 量 地址输出数字量 IN V1(V) A2A1 A0D7 D6 D5 D4 D3 D2 D1 D0 十进制IN0 4.5 0 0 0 0 1 1 1 0 0 1 1 115 IN1 4.0 0 0 1 0 1 1 0 0 1 1 0 102 IN2 3.5 0 1 0 1 0 1 0 1 0 0 1 89 IN3 3.0 0 1 1 0 1 0 0 1 1 0 0 76 IN4 2.5 1 0 0 0 0 1 1 1 1 1 1 63 IN5 2.0 1 0 1 0 0 1 1 0 0 1 1 51 IN6 1.5 1 1 0 0 0 1 0 0 1 1 0 38 IN7 1.0 1 1 1 0 0 0 1 1 0 0 1 25
运动控制系统实验报 告 姓名刘炜原 学号 201303080414
实验一 晶闸管直流调速系统电流 -转速调节器调试 一. 实验目的 1 ?熟悉直流调速系统主要单元部件的工作原理及调速系统对其提出的要求。 2?掌握直流调速系统主要单元部件的调试步骤和方法。 三. 实验设备及仪器 1?教学实验台主控制屏。 2. ME —11 组件 3. MC —18 组件 4. 双踪示波器 5. 万用表 四. 实验方法 1. 速度调节器(ASR 的调试 按图1-5接线,DZS (零速封锁 器)的扭子 开关扳向“解除”。 (1) 调整输出正、负限幅值 “ 5”、“ 6”端 接可调电容, 使ASR 调节器为PI 调节器,加入 一定的输入电压(由MC —18的给 定提供,以下同),调整正、负限 幅电位器RR 、 RP ,使输出正负值 等于:5V 。 (2) 测定输入输出特性 将反馈网络中的电容短接 (“ 5”、“6 ”端短接),使 ASR 调节器为P 调节器,向调节器输入 端逐渐加入正负电压,测出相应的 输出电压,直至输出限幅值,并画 出曲线。 (3) 观察PI 特性 拆除“ 5”、“6”端短接线,突加 二.实验内容 1?调节器的调试 C B RF 4 2 HP1 RP2 6 4 2 3 1 NMCL-31A 可调电容,位于 NMCL-18的下部 封锁 -S 2 反 号 Q 9 ASR ( ??) DZS (零速封锁 解除 ACR 电就声书器) 11 12 图1-5速度调节器和电流调节器的调试接线图
给定电压(_0.1V),用慢扫描示波器观察输出电压的 变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容 箱改变数值。 2.电流调节器(ACR的调试 按图1-5接线。 (1)调整输出正,负限幅值 “9”、“10”端接可调电容,使调节器为PI调节器,加入一定的输入电压,调整正,负限幅电位器,使输出正负最大值等于_5V。 (2)测定输入输出特性 将反馈网络中的电容短接(“ 9”、“10”端短接),使调节器为P调节器,向调节器输入端逐渐加入正负电压,测出相应的输出电压,直至输出限幅值,并画出曲线。 (3)观察PI特性 拆除“ 9”、“10”端短接线,突加给定电压,用慢扫描示波器观察输出电压的变化规律,改变调节器的放大倍数及反馈电容,观察输出电压的变化。反馈电容由外接电容箱改变 数值。