
第五章综合的约束与优化
综合的一个很重要的概念就是:单纯的映射是远远不够的,更重要的是设计的整体优化。一方面设计工程师为综合规定必要的约束,例如对面积、速度、功耗的要求等,从而使优化有所依据;另一方面选择合适的综合器是优化程度的决定性因素。同一个设计使用不同的综合器所得到的优化结果可以相差3~5倍。
第一节综合约束
5-1-1 概述
综合约束是对可测量的电路特性所定义的设计目标,比如面积、速度和电容等。如果没有这些约束,Design Compiler 工具将不能有效地对你的设计进行最优化。
在对设计进行优化时,Design Compiler支持两种类型的约束:
●设计规则约束(Design rule constraints)
●最优化约束(Optimization constraints)
设计规则约束是固有的,在工艺库里定义;这些约束条件是为了保证设计的功能正确性,适用于使用工艺库的每一个设计;可以使这些约束比最优化约束更为严格。
最优化约束是外在的,由设计者自己定义;最优化约束描述设计指标,在整个dc_shell工作期间应用于当前设计;它们必须接近于现实情况。
D esign Compiler试图同时满足设计规则约束和最优化约束,但设计规则约束必须首先被满足。设计者可以以命令行
形式交互式的指定约束或者在一个约束文件里指令约束。
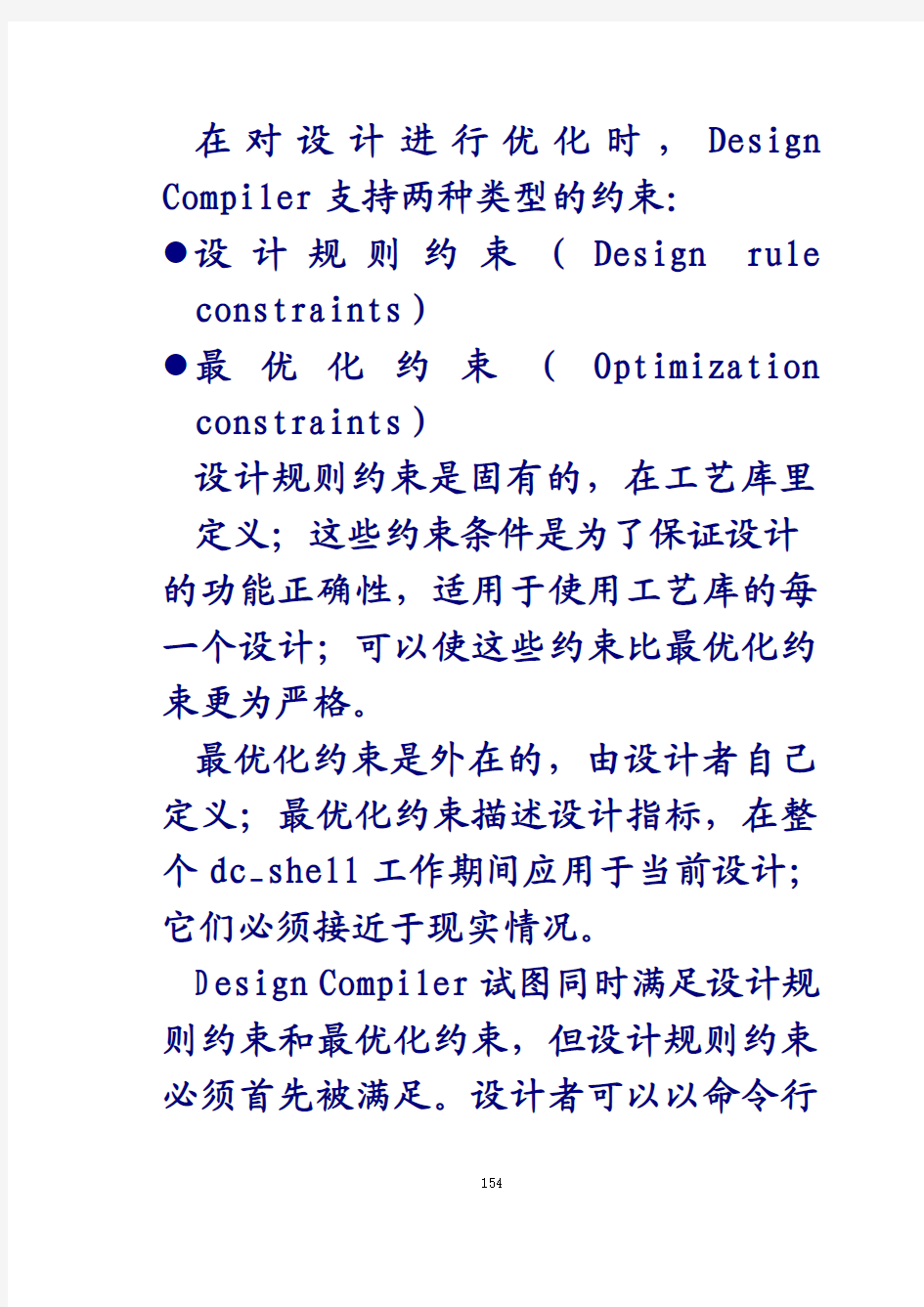
图 5.1显示了主要的设计规则约束和最优化约束,以及如何用dc_shell界面命令来设置这些约束。
图5.1 Major Design Compiler
Constraints
第二节设置设计规则约束
这一节将讨论最常用的设计规则约束:
?转换时间(Transition time)
?扇出负载(Fanout load)
?电容(Capacitance)
Design Compiler给设计对象赋予属性来表示这些设计规则约束。表5.1列出了每一个设计规则约束对应的属性名。
表5.1 设计规则属性
设计规则约束是工艺库里指定属性,你也可以明确地、随意地指定这些约束。
如果工艺库里定义了这些属性,在进行设计编译和生成约束报告时,Design Compiler暗中将它们应用于使用那个库的任何设计。你不能移走工艺库里定义的设计规则约束,因为它们是工艺的特定要求,但你可以使它们更为严格来适应你的设计。如果内在的和外在的设计规则约束同时应用于一个设计或一条线,更为严格的值拥有优先权。
5-2-1 设置转换时间约束
线的转换时间约束是对它的驱动管脚改变逻辑值的时序要求。转换时间是以工艺库数据为基础。对于非线性延迟模型(NLDM),输出转换时间是输入转换和输出负载的函数。
通过对一个单元的每一个输出管脚赋予max_transition属性,Design
Compiler和Library Compiler模拟转换时间约束。在最优化过程中,Design Compiler试图使每一条线的转换时间都小于max_transition属性值。命令set_max_transition用来改变工艺库里指定的最大转换时间约束。通过对指定的对象设置max_transition属性,这条命令给设计中所有线或与确定端口相连的线设置了最大转换时间。
比如,对设计adder中的所有线设置最大转换时间3.2,输入:
dc_shell> set_max_transition 3.2 find(design,adder)
利用remove_attribute命令来取消set_max_transition命令,比如,输入:dc_shell> remove_attribute find(design,adder)\max_transition
5-2-2 设置扇出负载约束
线的最大扇出负载是指这条线所能驱动的最大数目的负载。
通过赋予每一个输入管脚fanout_load属性和一个单元的每一个输出管脚max_fanout属性,Design Compiler和Library Compiler模拟扇出限制。
扇出负载值不表示电容;它表示对整个扇出负载的数字上的贡献。强加于一个输入管脚的扇出负载不必是1.0。库的开发者可以指定更高的扇出负载值来模仿内在的单元负载效果。将有那个管脚驱动的所有输入的fanout_load值相加,Design Compiler计算一个驱动管脚的扇出。为确定这个管脚是否满足最大扇出负载约束,Design Compiler将计算的扇
出负载值和管脚的max_fanout值相比较。
图5.2显示了一个小电路。其中管脚X 驱动两个负载,管脚A和管脚B。如果管
脚A的fanout_load值为1.0,管脚B的fanout_load为2.0,那管脚X的整个扇出负载为3.0。如果管脚X有一个大于3.0的最大扇出,比如说16.0,那管脚X符合扇出约束。
图5.2 扇出约束实例
在最优化时,Design Compiler试图满足每一个驱动管脚的扇出负载限制。如果一个管脚违反了扇出负载限制,Design Compiler会尽力改正这个问题(比如通过改变这个元件的驱动能力)。工艺库可能对整个库指定默认的扇出
约束,或对库描述的一个单独的单元里特定的管脚指定扇出约束。为确定你的工艺库是否为扇出计算而模拟,你可以对单元的输入管脚搜索fanout_load属性:
dc_shell> get_attribute find(pin, my_lib/*/*) fanout_load
用set_max_fanout命令对设计或输入管脚设置比工艺库里指定的更为保守的扇出约束(用set_fanout_load命令对输出端口设置预期的扇出负载值)。set_max_fanout命令通过对指定对象设置max_fanout属性对设计中的所有线或指定的输入端口设置最大扇出负载。比如,要对设计adder中的所有线设置max_fanout为16,输入:
dc_shell> set_max_fanout 16 find(design, adder)
如果你用set_max_fanout命令和存在库的max_fanout属性,Design Compiler 会尽力满足更小的扇出限制。
用remove_attribute命令来取消set_max_fanout命令,比如,输入:
dc_shell> remove_attribute find(design,adder) max_fanout
5-2-3 设置电容约束
转换时间约束并没有提供一个直接的方式来控制线的真实电容。如果你想要直接控制电容,利用set_max_capacitance命令来设置最大电容约束。这个约束是完全独立的,因此除了转换时间约束外,你还可以使用它。
通过给一个单元的输出端口或管脚赋予max_capacitance属性,Design
Compiler和Library Compiler模拟电容约束。把线电容和管脚电容相加,Design Compiler来计算输出线的电容。为确定线是否满足电容约束,Design Compiler 把计算出的电容值与输出管脚的max_capacitance值相比较。
比如,对设计adder中的所有线设置最大电容为3,输入:
dc_shell> set_max_capacitance 3 find(design,adder)
用remove_attribute命令来取消set_max_capacitance命令,如,输入:dc_shell> remove_attribute find(design,adder)\max_capacitance 你也可以用set_min_capacitance命令对输入端口或管脚设置最小电容。
第三节设置最优化约束
这一节中将讨论最常用的指定的最优化约束:
?时序约束(Timing constraints)?面积约束(Area constraints)
Design Compiler也支持功耗约束。图5.3解释了定义最优化约束的一些常用的命令。
图5.3 Commands Used to Define the Optimization Constraints for
Sequential Blocks
5-3-1 设置时序约束
时序约束指定了设计所要求的性能。为设置时序约束,
1.定义时钟。
2.定义与时钟相关的I/O的时序要求。
3.指定组合路径延迟要求。
4.指定时序异常。
表5.2列出了设置时序约束的命令。
表5.2 设置时序约束的命令
下面的部分将详细介绍三个步骤。
5-3-1-1 定义一个时钟
对于一个同步设计,时钟周期是最重要的约束,因为它对设计中所有寄存器到寄存器的路径加以约束。
1.定义时钟的周期和波形
利用create_clock来定义时钟的周期(-period选项)和波形(-waveform选项)。如果你没有指定时钟的波形,Design Compiler使用50%的占空循环。比如,对端口clk指定25兆赫和50%的占空循环,输入:
dc_shell> create_clock clk -period 40
当你的设计包含多时钟时,密切注意
这些时钟共同的基本周期。共同的基本周期是所有时钟周期最小的共同的倍数。比如,如果你有10,15,20的时钟周期,那共同的基本周期就为60。
定义你的时钟以使这个共同的基本周期是每一个时钟周期的最小的整数倍数。这个共同的基本周期的要求是定性的,不存在硬性限制。如果这个基本周期大于最小周期的十倍,那结果是要求更长的运行时间和更大的内存。
一个极端的情况是如果你有一个寄存器到寄存器的路径,其中一个寄存器的周期为10,而另一个寄存器的周期为10.1,那么共同的基本周期就为1010.0。通过指定不带小数点的时钟周期,插入不确定的时钟来调整时钟周期,你可以解决这个问题。
dc_shell> create_clock -period 10
clk1
dc_shell> create_clock -period 10 clk2
dc_shell> set_clock_uncertainty -setup 0.1 clk2
用report_clock命令来显示设计中所有时钟资源的信息,用remove_clock命令来移走时钟的定义。
2.创建虚拟时钟
许多情况下,一个模块里可能不存在系统时钟。你可以用create_clock-name 来创建一个虚拟时钟,模拟系统中表现的时钟信号。通过创建一个虚拟时钟,你可以描述模块外的与时钟相关的延迟。
dc_shell> create_clock -period 30 -waveform {10 25} \-name sys_clk 3.指定时钟网络延迟
默认情况下,Design Compiler假设时钟网络没有延迟(完美的时钟)。用set_clock_latency和set_clock_uncertainty命令来指定关于时钟网络延迟的时序信息。你也可以用这些命令来指定估计的或真实的延迟信息。用set_propagated_clock命令来指定通过时钟网络传播的时钟等待,比如:
dc_shell> set_propagated_clock clk 考虑到由于布局导致的时钟网络的变化,利用set_clock_latency命令的-setup或-hold选项增加少许的错误富余。比如,对于先期提到的20兆赫的时钟,在时钟边缘的每一边增加0.2的富余,输入:
dc_shell> set_clock_uncertainty -setup 0.2 clk
dc_shell> set_clock_uncertainty -hold 0.2 clk
使用report_clock命令的-skew选项来显示时钟网络的时滞信息。Design Compiler用这些时钟信息来确定一条路径是否满足建立和保持时间。
5-3-1-2 指定I/O时序要求
如果你没有对一个输入端口指定时序要求,Design Compiler假设信号在零时刻到达输入端口。绝大多数情况下,输入信号在交错时间到达。用命令set_input_delay定义输入端口的到达时间。你定义相对于系统时钟和其他输入端口的输入延迟约束。
如果你没有对一个输出端口指定时序要求,Design Compiler不会对任何一个以该输出端口结束的路径加以约束。用
附件4: 管理会计应用指引第504号——约束资源优化 第一章总则 第一条约束资源优化,是指企业通过识别制约其实现生产经营目标的瓶颈资源,并对相关资源进行改善和调整,以优化企业资源配置、提高企业资源使用效率的方法。 约束资源,是指企业拥有的实际资源能力小于需要的资源能力的资源,即制约企业实现生产经营目标的瓶颈资源,如流动资金、原材料、劳动力、生产设备、技术等要素及要素投入的时间安排等。 第二条约束资源优化一般适用于企业的投融资管理和营运管理等领域。 第二章应用环境 第三条企业应用约束资源优化工具方法,约束资源的缺口一般应相对稳定。 第四条企业应用约束资源优化工具方法,相关数据一般应完整并可获取,必要时提供信息技术的支持。 第三章应用程序 第五条企业应用约束资源优化工具方法,一般按照识别约束资
源、寻找突破方法、协同非约束资源、评价实施效果等程序进行。 第六条企业应用约束资源优化工具方法,应识别出管理过程中制约既定目标实现的约束资源,并对约束资源进行定量分析。在约束资源难以进行定量分析时,可以通过内部评审法、专家评价法等,识别出管理过程中的约束资源。 内部评审法,是指企业通过内部组织开展评议、审查识别约束资源的方法。企业通常应组建满足约束资源识别所需的,由财务部门、生产部门和其他相关部门人员组成的内部评审小组或类似评审组织,通过集中研讨等方式,识别出管理过程中的约束资源。 专家评价法,是指利用专家的经验、知识等识别约束资源的方法。对于企业既定目标的实现形成重大制约影响的约束资源,企业通常采用此方法进行综合评判。 第七条在识别约束资源的基础上,企业应比较约束资源的资源能力差距,搜集约束资源的相关数据等信息,系统分析约束资源形成的原因和涉及的实施责任主体,制定约束资源优化的实施方案,建立实现约束资源优化的长效机制,促进约束资源的资源能力提升。 (一)当约束资源是流动资金时,通常采取企业资金内部调剂、缩短应收账款回收周期、加快存货周转、延长付款周期等方法消除流动资金缺口,也可以通过外部融资扩大企业的资金来源,如债务融资、权益融资等。 (二)当约束资源是原材料时,通常采取设置库存缓冲,确保原材料的及时供应等方法消除原材料缺口。
1 附件4: 管理会计应用指引第504号——约束资源优化 第一章总则 第一条约束资源优化,是指企业通过识别制约其实现生产经营目标的瓶颈资源,并对相关资 源进行改善和调整,以优化企业资源配置、提高企业资源使用效率的方法。 约束资源,是指企业拥有的实际资源能力小于需要的资源能力的资源,即制约企业实现生产 经营目标的瓶颈资源,如流动资金、原材料、劳动力、生产设备、技术等要素及要素投入的 时间安排等。 第二条约束资源优化一般适用于企业的投融资管理和营运管理等领域。 第二章应用环境 第三条企业应用约束资源优化工具方法,约束资源的缺口一般应相对稳定。 第四条企业应用约束资源优化工具方法,相关数据一般应完整并可获取,必要时提供信息技 术的支持。 第三章应用程序 第五条企业应用约束资源优化工具方法,一般按照识别约束资 2 源、寻找突破方法、协同非约束资源、评价实施效果等程序进行。 第六条企业应用约束资源优化工具方法,应识别出管理过程中制约既定目标实现的约束资源,并对约束资源进行定量分析。在约束资源难以进行定量分析时,可以通过内部评审法、专家 评价法等,识别出管理过程中的约束资源。 内部评审法,是指企业通过内部组织开展评议、审查识别约束资源的方法。企业通常应组建 满足约束资源识别所需的,由财务部门、生产部门和其他相关部门人员组成的内部评审小组 或类似评审组织,通过集中研讨等方式,识别出管理过程中的约束资源。 专家评价法,是指利用专家的经验、知识等识别约束资源的方法。对于企业既定目标的实现 形成重大制约影响的约束资源,企业通常采用此方法进行综合评判。 第七条在识别约束资源的基础上,企业应比较约束资源的资源能力差距,搜集约束资源的相 关数据等信息,系统分析约束资源形成的原因和涉及的实施责任主体,制定约束资源优化的 实施方案,建立实现约束资源优化的长效机制,促进约束资源的资源能力提升。 (一)当约束资源是流动资金时,通常采取企业资金内部调剂、缩短应收账款回收周期、加 快存货周转、延长付款周期等方法消除流动资金缺口,也可以通过外部融资扩大企业的资金 来源,如债务融资、权益融资等。 (二)当约束资源是原材料时,通常采取设置库存缓冲,确保原材料的及时供应等方法消除 原材料缺口。 3 (三)当约束资源是劳动力时,通常采取招聘新员工、增设新岗位、其他岗位借调等方法消 除劳动力瓶颈。 (四)当约束资源是生产设备时,通常采取提前安排设备购置计划、或寻找委托加工方式补 充产能的不足。 (五)当约束资源是技术时,通常采取技术研发、引进新技术等方法来消除技术瓶颈。 (六)当约束资源是要素投入的时间时,通常在明确各项作业的关键路线和关键工序的基础上,重新安排各项作业的工作流程,利用时间缓冲进行优化,确保要素投入的时间不受影响。
行域 φ 内,选择一个初始点 X 然后确定一个可行 得一个目标函数有所改善的可行的新点 X 即完成了 第四章 约束优化设计 ● 概述 ● 约束坐标轮换法 ● 随机方向法 ● 罚函数法 概述 结构优化设计的问题,大多属于约束优化设计问题,其数学模型为: s .t . min f (x ) g u (x ) ≤ 0 h v (x ) = 0 x ∈ R n u = 1, 2,..., m v = 1, 2,..., p < n 根据求解方式的不同,可分为直接解法和间接解法两类。 直接解法是在仅满足不等式约束的可行设计区域内直接求出问题的约束最优解。属于 这类方法的有:随机实验法、随机方向搜索法、复合形法、可行方向法等。其基本思路: 在由 m 个不等式约束条件 gu(x )≤0 所确定的可 0 搜索方向 S ,且以适当的步长沿 S 方向进行搜索,取 1 一次迭代。以新点为起始点重复上述搜索过程,每次 均按如下的基本迭代格式进行计算: X k+1=X k +α k S k (k=0,1,2,..) 逐步趋向最优解, 直到满足终止准则才停止迭代。 直接解法的原理简单,方法实用,其特点是: 1) 由于整个过程在可行域内进行,因此,迭代计算 不论何时终止,都可以获得比初始点好的设计点。 2) 若目标函数为凸函数,可行域为凸集,则可获得全域最优解,否则,可能存在多个局 部最优解,当选择的初始点不同,而搜索到不同的局部最优解。 3) 要求可行域有界的非空集
φ(X,μ1,μ2)=F(X)+∑μ 1 G??g j X)??+∑μ2H??h k(X)?? a)可行域是凸集;b)可行域是非凸 集 间接解法 间接解法是将约束优化问题转化为一系列无约束优化问题来解的一种方法。由于间接解法可以选用已研究比较成熟的无约束优化方法,并且容易处理同时具有不等式约束和等式约束的问题。因而在机械优化设计得到广泛的应用。 间接解法中具有代表性的是惩罚函数法。将约束函数进行特殊的加权处理后,和目标函数 结合起来,构成一个新的目标函数,即将原约束优化问题转化为一个或一系列的无约束优 化问题。 m l j=1k=1 新目标函数 然后对新目标函数进行无约束极小化计算。 加权因子 间接法是结构优化设计中广泛使用的有效方法,其特点: 1)由于无约束优化方法的研究日趋成熟,为间接法提供可靠基础。这类算法的计算效率和数值计算的稳定性大有提高; 2)可以有效处理具有等式约束的约束优化问题; 3)目前存在的主要问题,选取加权因子较为困难,选取不当,不仅影响收敛速度和计算精度,甚至导致计算失败。
项目三 常用无约束最优化方法(一) [实验目的] 编写最速下降法、Newton 法(修正Newton 法)的程序。 [实验学时] 2学时 [实验准备] 1.掌握最速下降法的思想及迭代步骤。 2.掌握Newton 法的思想及迭代步骤; 3.掌握修正Newton 法的思想及迭代步骤。 [实验内容及步骤] 编程解决以下问题:【选作一个】 1.用最速下降法求 22120min ()25[22]0.01T f X x x X ε=+==,,,. 2.用Newton 法求 22121212min ()60104f X x x x x x x =--++-, 初始点 0[00]0.01T X ε==,,. 最速下降法 Matlab 程序: clc;clear; syms x1 x2; X=[x1,x2]; fx=X(1)^2+X(2)^2-4*X(1)-6*X(2)+17; fxd1=[diff(fx,x1) diff(fx,x2)]; x=[2 3]; g=0; e=0.0005; a=1; fan=subs(fxd1,[x1 x2],[x(1) x(2)]); g=0; for i=1:length(fan) g=g+fan(i)^2; end g=sqrt(g); step=0; while g>e step=step+1; dk=-fan; %点x(k)处的搜索步长
ak=((2*x(1)-4)*dk(1)+(2*x(2)-6)*dk(2))/(dk(1)*dk(2)-2*dk(1)^2-2*dk(2)^2); xu=x+ak*dk; x=xu; %输出结果 optim_fx=subs(fx,[x1 x2],[x(1) x(2)]); fprintf(' x=[ %d %d ] optim_fx=%d\n',x(1),x(2),optim_fx); %计算目标函数点x(k+1)处一阶导数值 fan=subs(fxd1,[x1 x2],[x(1) x(2)]); g=0; for i=1:length(fan) g=g+fan(i)^2; end g=sqrt(g); end %输出结果 optim_fx=subs(fx,[x1 x2],[x(1) x(2)]); fprintf('\n最速下降法\n结果:\n x=[ %d %d ] optim_fx=%d\n',x(1),x(2),optim_fx); c++程序 #include
无约束优化方法---鲍威尔方法 本实验用鲍威尔方法求函数f(x)=(x1-5)2+(x2-6)2 的最优解。 一、简述鲍威尔法的基本原理 从任选的初始点x⑴o出发,先按坐标轮换法的搜索方向依次沿e1.e2.e3进行一维搜索,得各自方向的一维极小点x⑴ x⑵ x⑶.连接初始点xo⑴和最末一个一维极小点x3⑴,产生一个新的矢量 S1=x3⑴-xo⑴ 再沿此方向作一维搜索,得该方向上的一维极小点x⑴. 从xo⑴出发知道获得x⑴点的搜索过程称为一环。S1是该环中产生的一个新方向,称为新生方向。 接着,以第一环迭代的终点x⑴作为第二环迭代的起点xo⑵,即 Xo⑵←x⑴ 弃去第一环方向组中的第一个方向e1,将第一环新生方向S1补在最后,构成第二环的基本搜索方向组e2,e3,S1,依次沿这些方向求得一维极小点x1⑵,x2⑵,x3⑵.连接 Xo⑵与x3⑵,又得第二环的新生方向 S2=x3⑵-xo⑵ 沿S2作一维搜索所得的极小点x⑵即为第二环的最终迭代点 二、鲍威尔法的程序 #include "stdafx.h" /* 文件包含*/ #include
#include
资源约束条件下工期、质量、成本综合均衡优化工期、成本和质量称为工程项目的三大控制目标, 三者之间相互依存、相互影响, 形成一个辩证的统一体. 因此, 必须对工期、质量、成本进行综合、均衡、统筹考虑. 由于受资金、人力、技术和地理环境等的制约, 在资源有限的约束条件下, 如何在三者之间取得平衡, 一直是业主、承包商、监理方共同关注的问题. 工程项目的工期、质量和成本三大目标之间的关系[1 ] , 如图1 所示. 网络计划问题是解决工程项目优化问题的基本方法.网络计划技术在解决工程费用、工期、资源等单目标优化问题方面, 带来了极大的方便. 然而, 现代的工程项目不单考虑工期、费用和资源均衡目标的优化, 还要综合考虑工程质量、安全和风险等诸多难以定量的因素, 甚至还要考虑在资源均衡、安全和风险约束下的工程质量、费用、工期的多目标优化问题, 网络计划技术在解决多个目标权衡的优化问题时效果往往不尽人意, 这就要求引入其它优化方法和技术综合加以解决. 国内外一些学者在质量成本、工期成本优化方面做了大量卓有成效的研究[1~ 6 ] , 而目前对工期、质量优化以及工期、质量、成本的综合优化问题研究较少, 尤其是对基于资源约束条件下的工程综合优化问题的研究更加少见. 文献[ 1 ]认为成本、工期和质量是评价建筑工程项目的主要指标, 文献[ 3 ]介绍了基于PERT(Program/Project Evaluation and Review Technique即计划评审技术)技术的工程项目工期、费用、质量控制模拟模型及风险分析方法, 文献[ 4 ]建立了线形模型来研究工期、成本以及质量之间的平衡关系. 文献[ 2 ]利用线
分数: ___________ 任课教师签字:___________ 课程作业 学年学期:2017——2018学年第二学期 课程名称:优化理论 作业名称:作业三 学生姓名: 学号: 提交时间:
一、问题重述 形如的min (x),x R n f ∈问题称为无约束优化问题,常用下降算法来解决这类问题。下降算法的关键在于步长和搜索方向的选取。步长的求取可以借助前面作业中提到的一维搜索等方法求取,而搜索方向算法可以分为两大类,解析法和直接法。 解析法借助了目标函数的导数进行搜索,这类算法搜索速度快、效率高,但是对目标函数的要求更为严格。常用的方法有最速下降法、Newton 法、共轭梯度法、拟Newton 法等。 直接法不使用导数,也不需要得到目标函数的明确解析式,只需要能够得到某些函数上的点即可。因此直接法的适用范围更广,但相应的收敛速度会较慢,计算量也会随着问题维数的增加而迅速增大。常用的方法有单纯形法、Powell 方向加速法以及Powell 改进算法。 本作业以直接法的Powell 法为例,解决具体的无约束优化问题,并对将Powell 方向加速法和Powell 改进算法解决结果进行对比。 二、算法原理 对于n 维正定二次函数(x)0.5T T f x Gx b x c =++,设011,,...(k n)k p p p -<关于G 共轭,0x 与1x 为任意不同点。分别从0x 与1x 出发,依次沿011,,...k p p p -作一维搜索。如果最后找到两个互不相同的极小点x a 与x b ,则x b a x -与011,,...k p p p -关于G 共轭。 Powell 方向加速法正是基于这一原理,每次迭代过程作n+1次一维搜索。第一次沿给定的n 个线性无关的方向011,,...n p p p -依次作一维搜索,之后沿由这一阶段的起点到第n 次搜索所得到的点的方向P 再做一次一维搜索,并把这次所得点作为下一阶段的起点,下一阶段的n 个搜索方向为011,,...,n p p p p -。以此直到找到最优解。 此算法是在迭代中逐次生成共轭方向,而共轭方向又是较好的搜索方向,所以称之为方向加速法。但是,此算法产生的n 个向量可能线性或近似线性相关,这时张不成n 维空间,可能得不到真正的极小点。因此,Powell 原始算法存在一定的缺陷。 Powell 改进算法虽然不再具有二次终止性,但克服了搜索方向的线性相关的不利情形,是解决无约束优化问题较有效的直接法之一。 本次作业一维搜索的过程是利用函数求导,求得最小值。经过试验发现,α是允许为负数的。否则最终寻优得到的极值点与实际结果存在很大的偏差,而且寻优的效率特别低下。
实验八 无约束优化问题 一.实验目的 掌握应用matlab 求解无约束最优化问题的方法 二.实验原理及方法 1:标准形式: 元函数 为其中n R R f X f n R x n →∈:) (min 2.无约束优化问题的基本算法一.最速下降法(共轭梯度法)算法步骤:⑴ 给定初始点 n E X ∈0,允许误差0>ε,令k=0; ⑵ 计算() k X f ?; ⑶ 检验是否满足收敛性的判别准则: () ε≤?k X f , 若满足,则停止迭代,得点k X X ≈*,否则进行⑷; ⑷ 令() k k X f S -?=,从k X 出发,沿k S 进行一维搜索, 即求k λ使得: ()() k k k k k S X f S X f λλλ+=+≥0 min ; ⑸ 令k k k k S X X λ+=+1,k=k+1返回⑵. 最速下降法是一种最基本的算法,它在最优化方法中占有重要地位.最速下降法的优点是工作量小,存储变量较少,初始点要求不高;缺点是收敛慢,最速下降法适用于寻优过程的前期迭代或作为间插步骤,当接近极值点时,宜选用别种收敛快的算法..牛顿法算法步骤: (1) 选定初始点n E X ∈0,给定允许误差0>ε,令k=0; (2) 求()k X f ?,()() 1 2-?k X f ,检验:若() ε
无约束最优化问题及其Matlab 求解 一、教学目标 1. 了解悟约束规划的基本算法最速下降法(共轭梯度法)的基本步骤 2. 掌握用Matlab 求解五约束的一元规划问题、多元规划问题、以及Matlab 求解过程中参数的设置。 3. 针对实际问题能列出其无约束规划方程并用Matlab 求解。 二、 教学手段 1. 用Flashmx 2004制作课件,并用数学软件Matlab 作辅助教学。 2. 采用教学手法上采取讲授为主、讲练结合的方法。 3. 上机实践操作。 三、 教学内容 (一)、求解无约束最优化问题的基本思想 标准形式: ★(借助课件说明过程) (二)、无约束优化问题的基本算法 1.最速下降法(共轭梯度法)算法步骤: ⑴ 给定初始点n E X ∈0,允许误差0>ε,令k=0; ⑵ 计算()k X f ?; ⑶ 检验是否满足收敛性的判别准则: ()ε≤?k X f , 若满足,则停止迭代,得点k X X ≈*,否则进行⑷; ⑷ 令()k k X f S -?=,从k X 出发,沿k S 进行一维搜索, 即求k λ使得: ()() k k k k k S X f S X f λλλ+=+≥0min ; ⑸ 令k k k k S X X λ+=+1,k=k+1返回⑵. 最速下降法是一种最基本的算法,它在最优化方法中占有重要地位.最速下降法的优点是工作量小,存储变量较少,初始点要求不高;缺点是收敛慢。 ★(借助课件说明过程,由于 算法 在实际中用推导过程比较枯燥,用课件显示搜索过程比较直观) 2. 采用Matlab 软件,利用最速下降法求解无约束优化问题 常用格式如下: (1)x= fminbnd (fun,x1,x2) (2)x= fminbnd (fun,x1,x2 ,options) (3)[x ,fval]= fminbnd (...) (4)[x ,fval ,exitflag]= fminbnd (...) (5)[x ,fval ,exitflag ,output]= fminbnd (...) 其中(3)、(4)、(5)的等式右边可选用(1)或(2)的等式右边。函数fminbnd ()X f n E X ∈min 其中 1:E E f n →
第四章 约束优化设计 ● 概述 ● 约束坐标轮换法 ● 随机方向法 ● 罚函数法 概述 结构优化设计的问题,大多属于约束优化设计问题,其数学模型为: 根据求解方式的不同,可分为直接解法和间接解法两类。 直接解法是在仅满足不等式约束的可行设计区域内直接求出问题的约束最优解。属于这类方法的有:随机实验法、随机方向搜索法、复合形法、可行方向法等。其基本思路: 在由m 个不等式约束条件g u (x )≤0所确定的可行域φ内,选择一个初始点0 X 然后确定一个可行搜索方向S ,且以适当的步长沿S 方向进行搜索,取得一个目标函数有所改善的可行的新点1 X 即完成了一次迭代。以新点为起始点重复上述搜索过程,每次均按如下的基本迭代格式进行计算: k+1k k k =+S (k=0,1,2,..)X X α逐步趋向最优解, 直到满足终止准则才停止迭代。 直接解法的原理简单,方法实用,其特点是: 1) 由于整个过程在可行域内进行,因此,迭代计算不论何时终止,都可以获得比初始点好 的设计点。 2) 若目标函数为凸函数,可行域为凸集,则可获得全域最优解,否则,可能存在多个局部 最优解,当选择的初始点不同,而搜索到不同的局部最优解。 3) 要求可行域有界的非空集 1,2,...,1,2,...,u m v p n == 间接解法 间接解法是将约束优化问题转化为一系列无约束优化问题来解的一种方法。由于间接解法可以选用已研究比较成熟的无约束优化方法,并且容易处理同时具有不等式约束和等式约束的问题。因而在机械优化设计得到广泛的应用。 间接解法中具有代表性的是惩罚函数法。将约束函数进行特殊的加权处理后,和目标函数结合起来,构成一个新的目标函数,即将原约束优化问题转化为一个或一系列的无约束优化问题。 然后对新目标函数进行无约束极小化计算。 间接法是结构优化设计中广泛使用的有效方法,其特点: 1) 由于无约束优化方法的研究日趋成熟,为间接法提供可靠基础。这类算法的计算效率和 数值计算的稳定性大有提高; 2) 可以有效处理具有等式约束的约束优化问题; 3) 目前存在的主要问题,选取加权因子较为困难,选取不当,不仅影响收敛速度和计算精 度,甚至导致计算失败。 a) 可行域是凸集;b)可行域是非凸集 () ()()()121211 ,,m l j k j k X F X G g X H h X φμμμμ==??=++? ?????∑∑ 新目标函数 加权因子 数学规划课程设计 题目外点法求约束最优化问题 姓名 学号 成绩 摘要 罚函数是应用最广泛的一种求解式的数值解法,基本思路是通过目标函数加上惩罚项,将原约束非线性规划问题转化为求解一系列无约束的极值问题。(这种惩罚体现在求解过程中,对于企图违反约束的那些迭代点,给予很大的目标函数值,迫使这一系列无约束问题的极小值或者无限地向可行解(域)逼近,或者一直保持在可行集(域)内移动,直到收敛于原来约束问题的极小值点。) 本文....... 外点法可用于求解不等式约束优化问题,又可用于求解等式约束优化问题,主要特点是惩罚函数定义在可行域的外部,从而在求解系列无约束优化问题的过程中,从可行域外部逐渐逼近原约束优化问题最优解。 关键词:罚函数法、约束最优化问题、外点法 一、预备知识(基本理论) 看下是否还有定理、定义等等,可以加一些 外点惩罚函数法的一般形式 考虑不等式约束优化设计时:对 ) ,2,1(,0)(. .), (min m u X g t s R x X f u n =≥∈ 构造一般形式的外点惩罚函数为: []2 1 } )(,0{min )(),(∑=+=m u u k k X g r X f r X P 其中: (1)当满足所有约束条件时惩罚项为0,即 []{}0 )(,0min 2 1 =∑=m u u k X g r (2)当 X 违反某一约束条件,即0 )( 第五章综合的约束与优化 综合的一个很重要的概念就是:单纯的映射是远远不够的,更重要的是设计的整体优化。一方面设计工程师为综合规定必要的约束,例如对面积、速度、功耗的要求等,从而使优化有所依据;另一方面选择合适的综合器是优化程度的决定性因素。同一个设计使用不同的综合器所得到的优化结果可以相差3~5倍。 第一节综合约束 5-1-1 概述 综合约束是对可测量的电路特性所定义的设计目标,比如面积、速度和电容等。如果没有这些约束,Design Compiler工具将不能有效地对你的设计进行最优化。 在对设计进行优化时,Design Compiler支持两种类型的约束: ●设计规则约束(Design rule constraints) ●最优化约束(Optimization constraints) 设计规则约束是固有的,在工艺库里定义;这些约束条件是为了保证设计 的功能正确性,适用于使用工艺库的每一个设计;可以使这些约束比最优化约束更为严格。 最优化约束是外在的,由设计者自己定义;最优化约束描述设计指标,在整个dc_shell 工作期间应用于当前设计;它们必须接近于现实情况。 Design Compiler试图同时满足设计规则约束和最优化约束,但设计规则约束必须首先被满足。设计者可以以命令行形式交互式的指定约束或者在一个约束文件里指令约束。 图5.1显示了主要的设计规则约束和最优化约束,以及如何用dc_shell界面命令来设置这些约束。 图5.1 Major Design Compiler Constraints 第二节设置设计规则约束 这一节将讨论最常用的设计规则约束: ?转换时间(Transition time) ?扇出负载(Fanout load) ?电容(Capacitance) Design Compiler给设计对象赋予属性来表示这些设计规则约束。表5.1列出了每一个设计规则约束对应的属性名。 表5.1 设计规则属性 设计规则约束是工艺库里指定属性,你也可以明确地、随意地指定这些约束。如果工艺库里定义了这些属性,在进行设计编译和生成约束报告时,Design Compiler暗中将它们应用于使用那个库的任何设计。你不能移走工艺库里定义的设计规则约束,因为它们是工艺的特定要求,但你可以使它们更为严格来适应你的设计。如果内在的和外在的设计规则约束同时应用于一个设计或一条线,更为严格的值拥有优先权。 5-2-1 设置转换时间约束 线的转换时间约束是对它的驱动管脚改变逻辑值的时序要求。转换时间是以工艺库数 `第五章综合的约束与优化 综合的一个很重要的概念就是:单纯的映射是远远不够的,更重要的是设计的整体优化。一方面设计工程师为综合规定必要的约束,例如对面积、速度、功耗的要求等,从而使优化有所依据;另一方面选择合适的综合器是优化程度的决定性因素。同一个设计使用不同的综合器所得到的优化结果可以相差3~5倍。 第一节综合约束 5-1-1 概述 综合约束是对可测量的电路特性所定义的设计目标,比如面积、速度和电容等。如果没有这些约束,Design Compiler工具将不能有效地对你的设计进行最优化。 在对设计进行优化时,Design Compiler支持两种类型的约束: ●设计规则约束(Design rule constraints) ●最优化约束(Optimization constraints) 设计规则约束是固有的,在工艺库里定义;这些约束条件是为了保证设计 的功能正确性,适用于使用工艺库的每一个设计;可以使这些约束比最优化约束更为严格。 最优化约束是外在的,由设计者自己定义;最优化约束描述设计指标,在整个dc_shell 工作期间应用于当前设计;它们必须接近于现实情况。 D esign Compiler试图同时满足设计规则约束和最优化约束,但设计规则约束必须首先被满足。设计者可以以命令行形式交互式的指定约束或者在一个约束文件里指令约束。 图5.1显示了主要的设计规则约束和最优化约束,以及如何用dc_shell界面命令来设置这些约束。 图5.1 Major Design Compiler Constraints 第二节设置设计规则约束 这一节将讨论最常用的设计规则约束: ?转换时间(Transition time) ?扇出负载(Fanout load) ?电容(Capacitance) Design Compiler给设计对象赋予属性来表示这些设计规则约束。表5.1列出了每一个设计规则约束对应的属性名。 表5.1 设计规则属性 Design Rule Constraint Attribute Name Transition time max_transition Fanout load max_fanout Capacitance max_capacitance min_capacitance Cell degradation cell_degradation Connection class connection_class 设计规则约束是工艺库里指定属性,你也可以明确地、随意地指定这些约束。如果工艺库里定义了这些属性,在进行设计编译和生成约束报告时,Design Compiler暗中将它们应用于使用那个库的任何设计。你不能移走工艺库里定义的设计规则约束,因为它们是工艺的特定要求,但你可以使它们更为严格来适应你的设计。如果内在的和外在的设计规则约束同时应用于一个设计或一条线,更为严格的值拥有优先权。 5-2-1 设置转换时间约束 线的转换时间约束是对它的驱动管脚改变逻辑值的时序要求。转换时间是以工艺库数 分数: ___________任课教师签字:___________ 课程作业 学年学期:2017——2018学年第二学期 课程名称:优化理论 作业名称:作业三 学生姓名: 学号: 提交时间: 一、问题重述 形如的min (x),x R n f ∈问题称为无约束优化问题,常用下降算法来解决这类问题。下降算法的关键在于步长和搜索方向的选取。步长的求取可以借助前面作业中提到的一维搜索等方法求取,而搜索方向算法可以分为两大类,解析法和直接法。 解析法借助了目标函数的导数进行搜索,这类算法搜索速度快、效率高,但是对目标函数的要求更为严格。常用的方法有最速下降法、Newton 法、共轭梯度法、拟Newton 法等。 直接法不使用导数,也不需要得到目标函数的明确解析式,只需要能够得到某些函数上的点即可。因此直接法的适用范围更广,但相应的收敛速度会较慢,计算量也会随着问题维数的增加而迅速增大。常用的方法有单纯形法、Powell 方向加速法以及Powell 改进算法。 本作业以直接法的Powell 法为例,解决具体的无约束优化问题,并对将Powell 方向加速法和Powell 改进算法解决结果进行对比。 二、算法原理 对于n 维正定二次函数(x)0.5T T f x Gx b x c =++,设011,,...(k n)k p p p -<关于G 共轭,0x 与1x 为任意不同点。分别从0x 与1x 出发,依次沿011,,...k p p p -作一维搜索。如果最后找到两个互不相同的极小点x a 与x b ,则x b a x -与011,,...k p p p -关于G 共轭。 Powell 方向加速法正是基于这一原理,每次迭代过程作n+1次一维搜索。第一次沿给定的n 个线性无关的方向011,,...n p p p -依次作一维搜索,之后沿由这一阶段的起点到第n 次搜索所得到的点的方向P 再做一次一维搜索,并把这次所得点作为下一阶段的起点,下一阶段的n 个搜索方向为011,,...,n p p p p -。以此直到找到最优解。 此算法是在迭代中逐次生成共轭方向,而共轭方向又是较好的搜索方向,所以称之为方向加速法。但是,此算法产生的n 个向量可能线性或近似线性相关,这时张不成n 维空间,可能得不到真正的极小点。因此,Powell 原始算法存在一定的缺陷。 Powell 改进算法虽然不再具有二次终止性,但克服了搜索方向的线性相关的不利情形,是解决无约束优化问题较有效的直接法之一。 本次作业一维搜索的过程是利用函数求导,求得最小值。经过试验发现,α是允许为负数的。否则最终寻优得到的极值点与实际结果存在很大的偏差, 资源优化调度问题研究 【摘要】资源优化调度问题是一个广泛存在的复杂系统问题,以物流配送和排课问题等的一类资源优化调度的典型问题,由其难解性引起了较为广泛的关注。本文以排课问题为例,提出了基于不等式方法的多目标遗传算法解决方案,对排课问题的研究具有重要的现实意义。 【关键词】资源优化调度问题;排课问题 1.资源优化调度问题概述 资源优化调度问题是工程领域的一个普遍问题,在工程实践中,资源的优化调度关系到整体的效率和效益,具有很高的研究和应用价值。资源优化调度一般涉及的变量较多,属于带约束的多目标优化问题,而物流配送等的一类问题区别于一般的多目标优化问题,具有以下几个特点: (1)这类资源优化调度问题是带约束的多目标优化问题,并且这些约束既包含常规约束,也包含动态约束,常规约束确定解的可行区域,动态约束则确定解的折中与妥协空间。 (2)这类资源优化调度问题在求解过程中,可行解不一定是合理的,最后寻求的更多是满意解。如在排课问题中,有一门课是一周上两次的,在解中,两次课刚好连在一起,这也是不合理的。 (3)这类资源优化调度问题在应用遗传算法求解的过程中,其基因存在唯一性,区别于一般的遗传算法应用问题。如货物配送地点与货物需求量的组合,课程与教师、班级的组合,这些都是唯一的。 (4)这类资源优化调度问题在资源的组合优化方面具有一定的可调整空间。因为这类问题涉及时间和人员等,所以在资源调度过程中,可以通过适当地增加或减少少量的时间或人员方面的资源,达到资源的充分和有效利用,从而提高效率和效益。 2.资源优化调动问题的描述 多目标优化问题(MOP)一般采用如下定义: 一般MOP由n个决策变量参数、k个目标函数和m个约束条件组成,目标函数、约束条件与决策变量满足一定的关系。最优化问题如下: 这里,x表示决策变量,y表示目标向量,X表示决策向量x形成的决策空间,Y表示目标向量y形成的目标空间,约束条件e(x)?燮0确定决策向量的可行取值范围。 第七章 无约束最优化的解析法 本章主要内容:最速下降法及其收敛性与收敛速度 Newton 切线法及其收敛性 与收敛速度 阻尼Newton 法 共轭梯度法及其收敛性 变度量 法、最小二乘法 教学目的及要求:掌握最速下降法并理解其收敛性与收敛速度,掌握Newton 切 线法并理解其收敛性与收敛速度,了解阻尼Newton 法;掌握 共轭梯度法并理解其收敛性;了解变度量法、最小二乘法。 教学重点:最速下降法. 教学难点:变度量法. 教学方法:启发式. 教学手段:多媒体演示、演讲与板书相结合. 教学时间:6学时. 教学内容: §7.1 最速下降法 考虑无约束最优化问题 m i n ()f x , (7.1.1) 其中:n f R R →具有一阶连续偏导数. 算法7-1(最速下降法) Step1 选取初始数据.选取初始点0x ,给定允许误差0ε>,令0k =. Step2 检查是否满足终止准则.计算()k f x ?,若()k f x ε?<,迭代终止,k x 为问题(7.1.1)的近似最优解;否则,转Step3. Step3 进行一维搜索.取()k k d f x =-?,求k λ和1k x +,使得 ()min ()k k k k k f x d f x d λλλ≥+=+, 1k k k k x x d λ+=+. 令:1k k =+,返回Step2. 特别地,考虑 1m i n ()2 T T f x x Qx b x c =++, (7.1.2) 其中,n n n x R Q R ?∈∈为正定矩阵,,n b R c R ∈∈. 设第k 次迭代点为k x ,从点k x 出发沿()k f x -?作一维搜索,得 1()k k k k x x f x λ+=-?, 其中k λ为最优步长.根据定理 6.1.1,有1()() 0T k k f x f x +??=.而(),n f x Q x b x R ?=+?∈, 所以1()()()k k k k f x f x Q f x λ+?=?-?,从而(()())()0T k k k k f x Q f x f x λ?-??=,而Q 正定,即()()0T k k f x Q f x ??>,故由上式解出 ()()()() T k k k T k k f x f x f x Q f x λ??=??, (7.1.3) 于是 1()()()()() T k k k k k T k k f x f x x x f x f x Q f x +??=-???, (7.1.4) 这是最速下降法用于问题(7.1.2)的迭代公式. 例1 用最速下降法求解问题 2212min ()4f x x x =+, (7.1.5) 其中12(,)T x x x =.取初始点(0)(1,1)T x =,允许误差0.1ε=. 解 问题(7.1.5)中的f 是正定二次函数,且 800,,0020Q b c ????=== ? ????? . f 在点12(,)T x x x =处的梯度12()(8,2)T f x x x ?=. 第一次迭代: 令搜索方向(0)(0)()(8,2)T d f x =-?=--, (0)d ε==>, 从点(0)x 出发沿(0)d 作一维搜索,由(7.1.3)式和(7.1.4)式有 0680.130769520 λ==, (1)(1,1)0.130769(8,2)(0.046152,0.738462)T T T x =+--=-. 第三章无约束最优化方法 本章内容及教学安排 第一节概述 第二节迭代终止原则 第三节常用的一维搜索方法 第四节梯度法 第五节牛顿法 第六节共轭方向法 第七节变尺度法 第八节坐标轮换法 第九节鲍威尔方法 第一节概述 优化问题可分为 无约束优化问题 有约束优化问题 无约束最优化问题求解基于古典极值理论的一种数值迭代方法,主要用来求解非线性规划问题 迭代法的基本思想: 所以迭代法要解决三个问题 1、如何选择搜索方向 2、如何确定步长 3、如何确定最优点(终止迭代) 第二节 迭代终止准则 1)1K K X X ε+-≤ 111/2 21K K K K n i i i X X X X ε++=??-=-≤???? ∑() 2) 11()()()() () K K K K K f X f X f X f X or f X ε ε ++-≤-≤ 3)(1)()K f X ε+?≤ 第三节 常用的一维搜索方法 本节主要解决的是如何确定最优步长的问题。 从初始点(0)X 出发,以一定的步长沿某一个方向,可以找到一个新的迭代点,其公式如下: (1)(0)00(2)(1)11(1)() K K k k X X S X X S X X S ααα+=+=+= + 现在假设K S 已经确定,需要确定的是步长k α,就把求多维目标函数的极小值这个多维算过程中,当起步点和方向问题,变成求一个变量即步长的最优值的一维问题了。即 (1)()min ()min ()min ()K K K k k f X f X S f αα+=+= 由此可见,最佳步长*K α由一维搜索方法来确定 求*k α,使得()()()()()()min K K K K f f X S αα=+→ 一、一维搜索区间的确定 区间[,]a b 应满足 ()(*)()f a f f b α><外点法求约束最优化问题
第五章 综合的约束与优化
Ch5_综合的约束与优化
单纯形法解决无约束优化问题
资源优化调度问题研究
7无约束最优化的解析法
第三章 无约束最优化方法
相关主题
文本预览