收稿日期:2007209225
作者简介:熊文海(1976—
),男,湖北安陆人,讲师,博士,主要研究航行安全与船舶操纵,复杂系统与复杂网络。E 2mail :wenhaixg @https://www.doczj.com/doc/f7454096.html,
文章编号:1000-4653(2007)04-0009-04
基于细长体理论的小水线面双体船操纵性预报
熊文海1
, 周振路1
, 陈 力
2
(1.青岛远洋船员学院,山东青岛266071;2.潍坊通达国际海运学校,山东潍坊261021)
摘 要:小水线面双体船(SW ATH )由于具有良好的船舶快速性、耐波性、稳性和效率高等特点,已经成为新船型的代表。根据小水线面双体船的船型结构特点,在操纵运动数学模型的基础上,充分考虑小水线面船的结构特点和双体、双桨、双舵之间水动力的相互影响,采用细长体理论计算了附加质量、附加惯性矩和线性水动力导数,编制了双体船操纵运动预报程序,并结合实例对SW ATH 的操纵性能进行了预报。关键词:水路运输;小水线面双体船;操纵性预报;水动力导数;操纵运动数学模型中图分类号:U675.95 文献标识码:A
Prediction of SWATH Maneuverability B ased on Slender Body Theory
XIONG Wen 2hai 1
, ZHOU Zhen 2lu 1
, CHEN Li
2
(1.Qingdao Ocean Shipping Mariners ’C ollege ,Qingdao 266071,China ;
2.Weifang T ongda Nautical Academy ,Weifang 261021,China )
Abstract :SW ATH is a new kind of ship types due to its excellent powering and seakeeping per formances as well as stability.T aking the characteristics of SW ATH ship form and the hydrodynamic interaction am ong twin bodies ,twin propellers and twin rudders into consideration ,its hydrodynamic force derivatives and added mass as well as added m oment of inertia are com puted based on theory of slender body ,the program of predicting SW ATH maneuverability is com piled using the M MG maneuvering m odel at sea and illustrated with an exam ple.
K ey w ords :Waterway transportation ;SW ATH ;Maneuverability prediction ;Hydrohynamic force derivative ;M odel of M MG
小水线面双体船SW ATH (Small Waterplane Area
T win Hull )是一种排水型的高性能船舶。它由水下船体(也称潜体、主体)、水上船体(也称箱体)、支柱和附加的稳定鳍组成。这种船型兼容了潜艇、水翼艇和双体船的许多优点,又克服了它们的缺陷,而且这种船型在波浪中船体摇摆幅度较小,具有良好的耐波性和稳性,因此特别适合于风浪较大的航线或对“全天候”要求较高的航线;除此之外,当它高速航行时,静水阻力性能和波浪中阻力性能都比较好,且由于推进器浸深较大,推进效率也较高,因此近年来世界各国都在大力发展、推广这种船型。
船舶操纵性是船舶的重要性能之一,由于其涉及到波浪环境力的影响,这给船舶操纵性预报的试验研究和计算工作增加了技术难度,因此它一直是国内外学者致力解决的船舶操纵性技术难点之一,到目前为止还鲜有对SW ATH 船舶操纵性预报的研究见于报道,本文尝试在操纵运动数学模型(M MG )
的基础上,充分考虑双体船的结构特点和双体、双桨、双舵之间水动力的相互影响,采用细长体理论计算出了其附加质量和线性水动力导数,用理论与计算机数值模拟的方法对SW ATH 船舶的操纵性进行了预报,结果表明采用本方法切实可行。
1 SWATH 操纵运动数学模型
1.1 坐标系
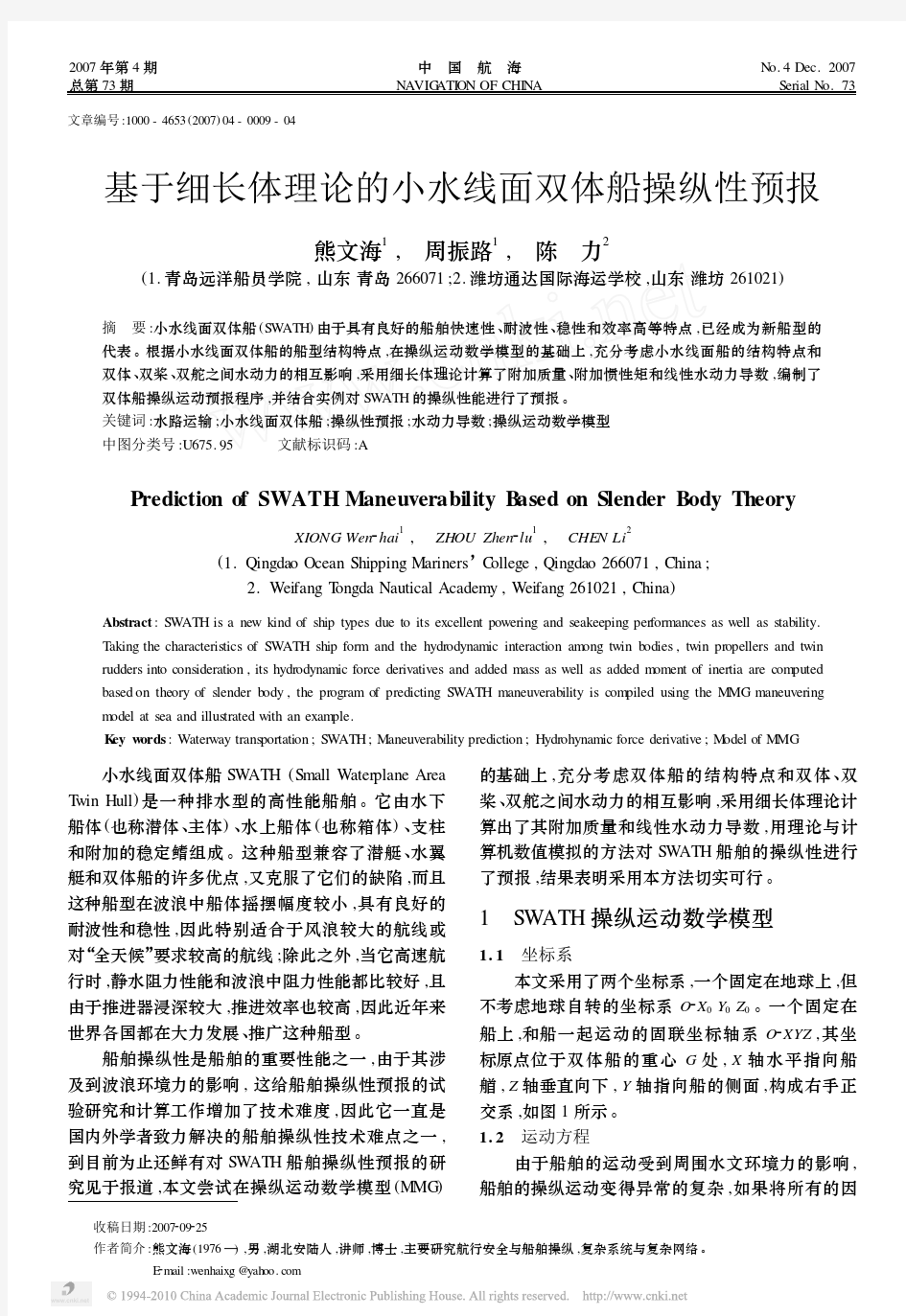
本文采用了两个坐标系,一个固定在地球上,但不考虑地球自转的坐标系O 2X 0Y 0Z 0。一个固定在船上,和船一起运动的固联坐标轴系O 2XYZ ,其坐标原点位于双体船的重心G 处,X 轴水平指向船艏,Z 轴垂直向下,Y 轴指向船的侧面,构成右手正交系,如图1所示。1.2 运动方程
由于船舶的运动受到周围水文环境力的影响,船舶的操纵运动变得异常的复杂,如果将所有的因
2007年第4期总第73期
中 国 航 海 NAVIG ATI ON OF CHI NA N o.4Dec.2007
Serial N o.73
素都考虑进去的话,船舶的操纵运动方程无解
,为了
便于理解问题,我们假定船舶航行在无限水深、无风、无流的水域;假设船体为刚体,同时忽略船舶摇荡之间的耦合影响,根据井上等提出的操纵运动M MG(Ship Manoeuvring Mathematical M odel G roup)数学模型,船舶在水平面上的运动方程可写为:
(m+m
x
) u-(m+m y)vr=X H+X P+X R
(m+m
y
) v+(m+m
x
)ur=Y
H
+Y R
(I
ZZ
+J ZZ) r=N H+N R
(1)
式(1)中:m是船舶的质量,m
x和m y表示船舶在水中运动时在X和Y方向的附连水质量;I
Z
为船舶质
量绕Z轴的惯性矩;J
ZZ
为船体在水中运动时绕Z轴的附连水质量惯性矩;u和v分别为船舶质心的纵向和横向速度;r为船舶绕Z轴的旋转角速度;下标H为裸船体;下标P为螺旋桨;下标R为舵;X H、Y H、N H为船体产生的水动力和力矩;X P为螺旋桨
产生的水动力;X
R 、Y
R
、N
R
为舵产生的水动力和力
矩。
图1 船舶操纵坐标系
Fig.1 C oordinate system of ship manoeuvrability
1.3 计算附连水质量与附连水惯性矩
目前对SW ATH这种船型的操纵运动预报资料很少,本文根据所选取的SW ATH船舶的主尺度,将其单个片体的主体简化为回转椭球体,支柱简化为主体的附体,采用兰伯(lamb)给出的公式得到单片体船舶的附连水质量和附连水惯性矩的表达式:
m x=k x 4π
3
ρab2=k
x
m
m y=k y 4π
3
ρab2=k
y
m
J ZZ=k Z 4π
15
ρab2(a2+b2)=k
Z
I ZZ
(2)
式(2)中:ρ为流体的质量密度;m、I
ZZ为回转椭球体
的质量和转动惯性矩;b、a为椭球体的长、短轴,k
x、k y、k Z=f(bΠa)可根据所给出的图谱查得。
对于SWATH的两个片体的附连水质量和附连水质量惯性矩可根据双体船的相应公式得到:
m x=2m1x1+
3
16
0.5b
c
3
m y=m1y1+
3
8
d
c
3
J ZZ=2m1x1+
3
16
0.5b
c
3
c2+J1ZZ1+
3
8
d
c
3
(3)
式(3)中:b为片体宽;d为吃水;c为片体之间的距
离;m
1x、m1y、J1ZZ分别为一个片体的附连水质量和附连水惯性矩。
1.4 船、桨、舵水动力的估算
1.4.1 船体水动力
根据井上模型,船舶的纵向船体水动力可写为: X H=X(u)+X vr vr+X vv v2+X rr r2(4)式(4)中:X(u)为船舶阻力。
根据SWATH船型的特点,单个片体的操纵运动
侧向力Y
H和偏航力矩N H可根据细长体理论计算:
Y H=-
ρ
2uvL d
π
2
λC3η+
ρ
2ur L
2d
π
4
λC3η
N H=-
ρ
2uvL
2d
π
4
λC3(2-η)-
ρ
2ur L
3d
π
8C
3η
(5)式(5)中:λ、c3、η可由以下各式得到:
∫L5C(x)
5x d x=-C3η
λ=2dΠL
(6) C(x)为x处横截面的无量纲化的附加惯性系数,它是该截面的附加质量与吃水d为半径的圆盘的附加质量的比值。在此认为C(x)是均匀分布的,其值为C3。
1.4.2 螺旋桨推力
单桨船的螺旋桨推力可表达为:
X P=(1-t)ρn2D4P K T(J)(7)
式(7)中:t为推力减额分数;n为螺旋桨转速;K
T为螺旋桨敞水推力系数;D
P为螺旋桨的直径;进速系数J用下式表示:
J=u(1-w P)Π(nD P)(8)
式(8)中:w
P为螺旋桨伴流分数,在船舶操纵过程中,螺旋桨有效伴流分数w
P可写为:
w P=w P0exp(- 4.0β2P)(9)
式(9)中:w
P0
为敞水伴流分数;β
P
为螺旋桨位置处的
几何漂角,定义为β
P
=β-
x P r
V
,其中x P为螺旋桨的纵向位置坐标,β为船舶坐标原点的漂角。
01 中 国 航 海2007年第4期
由于SW ATH船为双桨船,需要考虑双桨的影响,故其螺旋桨的推力计算公式为:
X P=(1-t)×(T Left+T Right)(10) 1.4.3 舵力及其力矩
在船、桨、舵三者之间,舵处于最后面的位置,它不仅受到螺旋桨工作的影响,而且还受到船体伴流的影响。单个舵力及操舵引起的水动力表示为:
X R=-(1-t R)F N sinδ
Y R=-(1-αH)F N cosδ
N R=-(1+αH)x R F N cosδ
(11)
式(11)中:t
R 为舵力减额系数;α
H
为操舵引起的船体
流体力的增额系数;x
R 为舵力作用中心坐标;x
H
为操
舵引起船体增额流体力作用中心坐标;F
N为作用舵的流体法向力。可采用藤井公式计算:
F N=1
2
ρ 6.13
λ
λ+2.25A d U
2
R
sinαR(12)
同理,SW ATH为双体船,也必须考虑其相互作用的影响,其舵力和舵力矩的计算公式便变为:
X R=-(1-t R)(F N
-
Left
+F N
-
Right
)sinδ
Y R=-(1+αR)(F N
-
Left
+F N
-
Right
)cosδ
N R=-(1-t R)C PP(F N
-
Left
-F N
-
Right
)sinδ-
(1+α
H
)x R(F N
-
Left
+F N
-
Right
)cosδ
(13)
式(13)中:C
PP
为两个螺旋桨之间距离的1Π2。
2 数值计算模拟与分析
2.1 计算框图和步骤
本文根据以上理论建立了SW ATH操纵运动的
预报程序系统,本程序包括3个部分:
1)各种水动力导数的计算子程序;
2)各种船舶操纵运动的计算子程序;
3)各种操纵性指标的计算子程序。
其程序框图见图2。
图2 SW ATH操纵运动预报框图
Fig.2 Prediction flow diagram of SW ATH manoeuvrability
2.2 算例分析
本文根据以上建立的SW ATH船舶操纵运动模
型以及各种水动力导数的估算公式,按照上述框图
的思路,采用四阶龙格-库塔积分便可以求出各种
舵角下SW ATH的操纵运动性能,从而达到对其操
纵性进行预报的目的,表1为一艘SW ATH实船的各
种主要参数,本文对其Z形操纵运动和旋回运动进
行了具体的预报,图3为该SW ATH船-10°Π10°Z形
操纵运动曲线,图4为不同舵角下的旋回曲线。
4 结 语
由于SW ATH船体结构与普通船舶具有很大的
不同,因此研究和预报SW ATH操纵性能的基本手
段和方法也与普通单体船不同,但是仍然可以采用
11
熊文海,等:基于细长体理论的小水线面双体船操纵性预报
图3 -10°Π10°Z 形操纵运动曲线
Fig.
3 Z igzag curve of manoeuvrability under -10~10degrees
表1 船舶主要参数表
T ab.1 The m ain p arameter of SWATH
总长Πm 40.40主机功率Πshp 1300两柱间长L pp Πm 34.54螺旋桨直径D p Πm 2.20船宽B Πm 16.35片体间距C Πm 11.40型深D Πm 6.48舵展弦比λ 1.68吃水d Πm 3.70
桨叶数Z
4支柱形式双支柱舵面积A R Πm
2
5.481方型系数C b
0.5263排水量Πt
370.84
图4 不同舵角下的旋回曲线
Fig.4 Turning curve under different rudder angle
理论分析法和船模试验法,然而这两种方法都存在
缺陷,因此到目前为止还很少见到对SW ATH 操纵性能进行预报的文章,也没有见到船模实验结果的报道。
由于使用船舶数学模型的理论分析方法的成本较低,而且容易根据环境的变化对模型进行调整来符合用户的需要,因此用这种方法来预报SW ATH 操纵性能已经成为SW ATH 船舶设计、营运者所关注的课题之一,本文采用类似于单体船的操纵预报模型,但考虑到SW ATH 船舶在其构造上的特殊性以及双船体、双桨和双舵间流体作用力的相互影响,采用细长体理论估算了SW ATH 船的附连水质量和附连水质量惯性矩及各种水动力导数,从而对SW ATH 船舶的操纵性能进行了预报,从预报结果来
看,基本符合船舶操纵运动原理,也符合船舶实际运
动规律,因此采用本文所述的方法是可行的、有效的。但是由于采用了常规理论来计算SW ATH 的水动力系数,可能会存在一定的误差,而且由于目前没有船模试验结果对预报结果进行验证,也可能会有一些偏差,这些问题将待今后进行探讨。
参考文献
[1] Y ang Y ansheng.S tudy on ship manoeuvring mathematical
m odel in shiphandling simulator [C].M ARSI M ’96,
Denmark ,1996,43248.
[2] K ijima K.,S ome studys on the predicition for ship
manoeuvrability [C]M ARSI M ’2003,1522157.
[3] Proceedings of the 23rd ITT C.The Manoeuvring C ommittee
Final Report and Recommendations to the 23rd ITT C [R].2002.Venice ,I taly.
[4] Proceedings of the 23rd ITT C ,The S pecialist C ommittee On
Ess o Osaka Final Report and Recommendations to the 23rd ITT C [R].2002.Venice ,I taly.
[5] 范尚雍,程智斌,吕韶康.高速双浆双舵的船—浆—舵
之间的水动力干扰[J ].中国造船.1989,(2):25231.
FAN Shang 2y ong ,CHE NG Zhi 2bin ,LV Shao 2kang.
Inter ference of hydrodynamics am ong ship 2propeller 2rudder of twin propeller and twin rudder high speed ship [J ].Shipbuilding of China ,1989,(2):25231.
[6] 张乐文,周轶美,吴秀恒.操纵运动船体水动力计算
[J ].船舶工程.1999,(2):12218. ZH ANG le 2wen ,ZH OU Y i 2mei ,W U X iu 2heng.
Hydrodynamics com putation of manoeuvrability hull [J ].Ship Engineering ,1999,(2):12218.
[7] 贾欣乐,杨盐生.船舶数学模型[M].大连:大连海事
大学出版社.1999. J I A X in 2le ,Y ANG Y an 2sheng.ship mathematical m odel
[M].Dalian :Dalian maritime university publishing house ,1999.
[8] 田超.风浪流作用下船舶操纵运动的仿真计算[D].
武汉理工大学硕士论文.2003.
TI AN Chao.S imulation com putation of manoeuvrability under
the action of wind wave current [D].Dissertation for master degree ,Wuhan University of technology ,2003.
[9] 方祥麟,姚杰,卓永强.船舶交通及操纵安全系统评
价模型与方法[M].大连:大连海事大学出版社.2003.
FANG X iang 2lin ,Y AO Jie ,ZH UO Y ong 2qiang.Safety system
evaluation m odels and methods of ship transportation and manoeuvrability [M].Dalian :Dalian maritime university publishing house ,2003.
[10] 杨盐生,方祥麟.在不均匀流中船舶操纵运动仿真模
型及应用[J ].中国造船,1998,(1):30234. Y ANG Y an 2sheng ,FANG X iang 2lin.ship manoeuvrability
simulation m odels and its application under nonuniform current [J ].Shipbuilding of China ,1998,(1):30234.
2
1
中 国 航 海2007年第4期
关键词:汽车操纵稳定性 1、蔡世芳(1985). "汽车操纵稳定性评价指标和参数匹配的工程分析方法." 汽车工程7(3): 21-29. 本文提出一种工程分析方法,并利用此方法研究评价指标和参数匹配规律。全文主要内容有四部份: (1)工程分析方法的数学模型; (2)评价指标的工程计算方法; (8)评价指标的相关分析和主要评价指标的推荐。(4)操纵稳定性参数匹配的基本规律。 2、岑少起, 潘筱, et al. (2006). "ADAMS 在汽车操纵稳定性仿真中的应用研究." 郑州大学学报: 工学版27(003): 55-58. 运用ADAMS软件建立了C型车多自由度整车多体动力学仿真模型,详细分析了前悬架系统、后钢板弹簧系统和轮胎模型,同时提出了一种建立钢板弹簧多体模型的新方法——中性面法,并对不同方向盘转角及改变整车质心位置下的操纵稳定性进行了动力学仿真.经过与实际车型性能比较,该模型与分析结果是准确、可靠的,可应用于汽车平顺性研究中. 3、陈克, 王工, et al. (2005). "基于ADAMS 的汽车操纵稳定性虚拟试验演示系统开发." 沈阳理工大学学报24(001): 59-61. 利用ADAMS动力学软件建立了整车多刚体系统模型.分别考虑车型、悬架、轮胎、车速等不同因素对整车操纵稳定性的影响,进行整车操纵稳定性6个性能试验的仿真分析.利用获取的动力学分析数据、仿真动画,实现汽车操纵稳定性虚拟试验演示系统. 4、陈黎卿, 王启瑞, et al. (2005). "基于ADAMS 的双横臂扭杆独立悬架操纵稳定性分析." 合肥工业大学学报: 自然科学版28(004): 341-345. 悬架的主要性能参数在悬架运动过程中的变化规律是影响悬架性能的主要因素。文章采用ADAMS软件建立了某商务车独立悬架的数学模型和仿真模型,分析了该悬架对操纵稳定性的影响,以及悬架主要性能参数的变化规律,为悬架设计奠定了基础。与传统的设计方法相比,这种方法提高了精度和效率。 5、邓亚东, 余路, et al. (2005). "ADAMS 在汽车操纵稳定性仿真分析中的运用." 武汉大学学报: 工学版38(002): 95-98. 利用ADAMS软件建立了某轿车的操纵动力学多体仿真模型,详细考虑了前后悬架系统、转向系统、轮胎以及各种连接件中的弹性衬套的影响,分析了汽车在方向盘转角阶跃输入时的转向特性.通过对不同车速、不同载荷下的仿真计算,得出汽车转向特性在这些条件下的不同表现,揭示了汽车转向特性与车速、载荷和轮胎的内在关系,为汽车操纵稳定性分析提供了参考. 6、董涵(2003). 侧风环境下高速汽车稳定性研究与分析[D], 长沙: 湖南大学. 随着汽车车速的不断提高,汽车侧风稳定性的研究日益重要。由于实车试验风险大、场地设备要求高,而使用计算机仿真则可以极大的的缩短产品开发周期。因而进行高速汽车侧风稳定性计算机仿真研究具有现实意义。在车辆动力学研究过程中,汽车数学模型的精确与否始终是一个关键问题。随着计算机技术的长足进步,以及多体系统动力学这一学科的成熟,汽车模型的自由度越来越多,仿真结果越来越精确。本文首先整理了汽车操纵稳定性的各项评价指标,根据汽车高速运动时的受力分析,使用非线性轮胎模型,建立了侧风环境下汽车运动十八自由度数学模型并进行了直线行驶运动仿真。
第一章绪论 近年来,越来越多的双体船占据了民用和军用船舶市场。它们新颖的外观、独特的综合性能受到世界各国的瞩目。据外电报道,美国海军新近欲按计划接收一艘高速双体船:“海上斗士”号,此消息再一次引起了人们对双体船的关注。 1.1双体船的概况与发展趋势 1.1.1双体船的概况 人类最早使用双体船是由于发现将两艘船横向连接在一起,可以从内河到海上航行而不容易翻船,早期曾将这种方法用在帆船上,建造了双体帆船,这种帆船在海上可以承受较大的风浪。在此基础上,人们又发现双体船与同样吨位的单体船相比,具有更大的甲板面积和舱容,因此而被用于货船。20世纪60年代后,随着海上高速客运的迅速发展,高速双体船由于有宽大的甲板面积、空间和便于豪华装饰而被普遍看好,成为近几十年来高性能船中发展最快、应用最广、建造数量最多的一种。 典型的高速双体船由两个瘦长的单体船(称为片体)组成,上部用甲板桥连接,体内设置动力装置、电站等设备,甲板桥上部安置上层建筑,内设客舱、生活设施等。高速双体船由于把单一船体分成两个片体,使每个片体更瘦长,从而减小了兴波阻力,使其具有较高的航速,目前其航速已普遍达到35-40节;由于双体船的宽度比单体船大得多,其稳定性明显优于单体船,且具有承受较大风浪的能力;双体船不仅具有良好的操纵性,而且还具有阻力峰不明显、装载量大等特点,因而被世界各国广泛应用于军用和民用船舶( 。
1.1.2双体船的航海性能 图1-1双体船的航海性能 1.1.3双体船的发展趋势 为进一步改善高速双体船的综合性能,人们在高速双体船的基础上派生了若干新型的双体船型。 (1)小水线面双体船和穿浪双体船的派生 所谓小水线面双体船,是由潜没于水中的鱼雷状下体、高于水面的平台(上体)和穿越水面联接上下体的支柱三部分组成,其优点在于水线面面积较小,受波浪干扰力较小,在波浪中具有优越的耐波性。另外,还具有宽阔的甲板面和充裕的使用空间。但也存在船体结构复杂,对重量分布较为敏感等问题。 穿浪双体船是在高速双体船的基础上发展起来的,是将小水线面和深V 型船在波浪中的优良航行性能、双体船的结构形式及水翼船弧形支柱等优点复合在一起的产物,具有良好的适航性,而且继承了双体船宽甲板的特点。 (2)双体船向大型化发展 为了改善快速性和耐波性尝试向复合船型发展,其中,小水线面船型将从双体演化成单体或三体、四体、五体等多体。为提高双体船在高海况下的航行能力,各国的研究方向大都集中在开发超细长体双体船的系统技术、优化线形设计和采用大功率喷水推进系统等方面。 双体船的航海性能 主要 性能 其他 性能 快 速 性 浮 性 稳 性 耐 波 性 操 纵 性 不 沉 性 隐 身 性
第5章汽车的操纵稳定性 学习目标 通过本章的学习,应掌握汽车行驶的纵向和横向稳定性条件;掌握车辆坐标系的有关术语,了解影响侧偏特性的因素,掌握轮胎回正力矩与侧偏特性的关系;熟练掌握汽车的稳态转向特性及其影响因素;了解汽车转向轮的振动和操纵稳定性的道路试验内容。 汽车在其行驶过程中,会碰到各种复杂的情况,有时沿直线行驶,有时沿曲线行驶。在出现意外情况时,驾驶员还要作出紧急的转向操作,以求避免事故。此外,汽车还要经受来自地面不平、坡道、大风等各种外部因素的干扰。一辆操纵性能良好的汽车必须具备以下的能力: (1)根据道路、地形和交通情况的限制,汽车能够正确地遵循驾驶员通过操纵机构所给定的方向行驶的能力——汽车的操纵性。 (2)汽车在行驶过程中具有抵抗力图改变其行驶方向的各种干扰,并保持稳定行驶的能力——汽车的稳定性。 操纵性和稳定性有紧密的关系:操纵性差,导致汽车侧滑、倾覆,汽车的稳定性就破坏了。如稳定性差,则会失去操纵性,因此,通常将两者统称为汽车的操纵稳定性。 汽车的操纵稳定性,是汽车的主要使用性能之一,随着汽车平均速度的提高,操纵稳定性显得越来越重要。它不仅影响着汽车的行驶安全,而且与运输生产率与驾驶员的疲劳强度有关。 节汽车行驶的纵向和横向稳定性 5.1.1 汽车行驶的纵向稳定性 汽车在纵向坡道上行驶,例如等速上坡,随着道路坡度增大,前轮的地面法向反作用力不断减小。当道路坡度大到一定程度时,前轮的地面法向反作用力为零。在这样的坡度下,汽车将失去操纵性,并可能产生纵向翻倒。汽车上坡时,坡度阻力随坡度的增大而增加,在坡度大到一定程度时,为克服坡度阻力所需的驱动力超过附着力时,驱动轮将滑转。这两种情况均使汽车的行驶稳定性遭到破坏。 图汽车上坡时的受力图 图为汽车上坡时的受力图,如汽车在硬路面上以较低的速度上坡,空气阻力 w F可以忽略不计,由于剩余驱动力用于等速爬坡,即汽车的加速阻力0 = j F,加速阻力矩0 = j M,而车轮的滚动阻力矩 f M的数值相对来说比较小,可不计入。 分别对前轮着地点及后轮着地点取力矩,经整理后可得 ? ? ? ?? ? ? = + - = - - sin cos sin cos 2 1 L G h aG Z L G h bG Z g g α α α α () 当前轮的径向反作用力0 1 = Z时,即汽车上陡坡时发生绕后轴翻车的情况,由式可得
第 五 章 5.1一轿车(每个)前轮胎的侧偏刚度为-50176N /rad 、外倾刚度为-7665N /rad 。若轿车向左转弯,将使两前轮均产生正的外倾角,其大小为40。设侧偏刚度与外倾刚度均不受左、右轮载荷转移的影响.试求由外倾角引起的前轮侧偏角。 答: 由题意:F Y =k α+k γγ=0 故由外倾角引起的前轮侧偏角: α=- k γγ/k=-7665?4/-50176=0.6110 5.2 6450轻型客车在试验中发现过多转向和中性转向现象,工程师们在前悬架上加装前横向稳定杆以提高前悬架的侧倾角刚度,结果汽车的转向特性变为不足转向。试分析其理论根据(要求有必要的公式和曲线)。 答: 稳定性系数:??? ? ??-=122k b k a L m K 1k 、2k 变化, 原来K ≤0,现在K>0,即变为不足转向。 5.3汽车的稳态响应有哪几种类型?表征稳态响应的具体参数有哪些?它们彼此之间的关系如何(要求有必要的公式和曲线)? 答: 汽车稳态响应有三种类型 :中性转向、不足转向、过多转向。 几个表征稳态转向的参数: 1.前后轮侧偏角绝对值之差(α1-α2); 2. 转向半径的比R/R 0;
3.静态储备系数S.M. 彼此之间的关系见参考书公式(5-13)(5-16)(5-17)。 5.4举出三种表示汽车稳态转向特性的方法,并说明汽车重心前后位置和内、外轮负荷转移如何影响稳态转向特性? 答:方法: 1.α1-α2 >0时为不足转向,α1-α2 =0时 为中性转向,α1-α2 <0时为过多转向; 2. R/R0>1时为不足转向,R/R0=1时为中性转向, R/R0<1时为过多转向; 3 .S.M.>0时为不足转向,S.M.=0时为中性转向, S.M.<0时为过多转向。 汽车重心前后位置和内、外轮负荷转移使得汽车质心至前后轴距离a、b发生变化,K也发生变化。 5.5汽车转弯时车轮行驶阻力是否与直线行驶时一样? 答:否,因转弯时车轮受到的侧偏力,轮胎产生侧偏现象,行驶阻力不一样。 5.6主销内倾角和后倾角的功能有何不同? 答:主销外倾角可以产生回正力矩,保证汽车直线行驶;主销内倾角除产生回正力矩外,还有使得转向轻便的功能。 5.7横向稳定杆起什么作用?为什么有的车装在前恳架,有的装在后悬架,有的前后都装? 答:横向稳定杆用以提高悬架的侧倾角刚度。
高性能船舶船型介绍 发布: 2010-3-11 18:07 | 作者: lowellzhu | 来源: 龙de船人 [i=s] 本帖最后由lowellzhu 于2010-3-11 18:27 编辑 接触高性能船舶时一直不太理解什么是高性能船以及高性能船舶船型的分类,经过翻阅各类书籍及论文,总结一下,供船人参考,并希望专业人士斧正! 当前,高性能船舶的研发与推广应用备受国内外造船界的青睐,其船型更是国际著名学者机构研究的热点。这类船舶种类繁多,新船型层出不穷,日新月异,在各类船舶中是新思想最丰富、最有创新、也最有活力的领域;其高航性、优良的耐波性、低物理场辐射特征、舒适安全性、良好的经济性等性能受到军事和民用领域的极大关注,拥有良好的发展前景 依据支持船重的方式和作用原理的差异对高性能船舶船型进行分类,并分别介绍各类船型。 1 高性能船舶的分类 高性能船舶按其特性可分为气垫船,水翼船,小水线面双体船,多体船,地效翼船,高速单体船等各式各样的显著不同于常规船舶的船型。而按照支承船重的方式和作用原理差异,把高性能船舶分为:浮力支承型、静态气垫升力支承型、动态升力支承型、复合型。本文将按照后者分类方式分别对各种高性能船舶的船型进行介绍。 2 船型介绍 2.1
浮力支承型 1)高速深V型船 船首部横剖面呈深V形,并突出到船体基线的下方,其V形断面比U形断面的船体可以更好的满足适航性的要求。深V船型具有两种基本的舯剖面形式,即单折角线或双折角线(见下图)。当要求设计艇有较大内部容积和较低的相对航行速度(低傅氏数)时采用双折线型,而单折角线型的艇则更适合于要求较低的排水量和较高的相对航行速度(较高傅氏数)的情况。然而,对船舯剖面形式的选择不存在确定性的规则,因为其它的参数也起重要作用。所以双折角线型也可以应用于快艇,反之亦然。 1.jpg 2) 小水线面双体船 小水线面双体船基本上由三大部分组成,即水下体(提供浮力)、桥体结构(生活与工作平台)、支柱(星双凸流线形截面,作为前二者之联结体)。 小水线面双体水下体(如图)有两个深置水下承受大部分浮力的鱼雷状下潜体,它的宽敞的船体高出水面,船体和鱼雷状下潜体之间由狭长的流线型支柱连接。 小水线面双体船有几种形式:下图所示的为“单体单支型”,还有“单体双支柱型”(即一个潜体用前后两个支柱连接),或者“双体双支柱型”(每一侧有前后两个潜体,每个潜体各有一个支柱)。下潜体后端安装有两个螺旋桨,内侧装有前后各两个稳定鳍,前小后大[5]。
船舶操纵与摇荡期末总复习 考试题目类型: 1. 名词解释(5题) 2. 填空(10题左右,空不限) 3. 画图题(1~2题左右) 4. 简答题(5~6题左右) 5. 计算分析题(2题) 考试内容(操纵性): 第一章绪论 1. 操纵性的定义?操纵性包括哪些方面的内容? 答:所谓操纵性是指船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变航速、航向和位置的性能。船舶操纵性包括以下四方面内容: A、航向稳定性:它是指船舶在水平面内的运动受扰动而偏离平衡位置,当扰动完全消除后,保持原有航向运动的性能; B、回转性:它是指船舶应舵作圆弧运动的性能; C、转首性及跟从性:它是指船舶应舵转首及迅速进入新的稳定运动状态的性能。前者称为转首性,后者称为跟从性; D、停船性能:它是指船舶对惯性停船和倒车停船的响应性能。 第2章船舶操纵 1、描述船舶运动的坐标系?什么是首向角、漂角以及航速角(定义及正负号)? 答:为了描述船舶的运动,我们常采用一下两种右手坐标系:a、固定坐标系Oxyz,它是固定在地球表面的右手坐标系,其原点O可以任意选择,通常与t=0时船舶重心G的位置相一致。Xy平面位于静水面内,z轴垂直向下为正。b、运动坐标系Gxyz,它是以船舶重心位置G为原点而固定于船体上的直角坐标系。x、y和z轴分别是经过G的水线面、横剖面和中纵剖面的郊县,x轴向首为正,z轴向下为正。 首向角:船舶的重心位置和船舶中纵剖面与x轴交角,称为首向角。由x轴转到中纵剖面顺时针为正。 漂角:船舶重心处的速度矢量V与x轴正方向的交角称为漂角,规定由速度矢量转到x 轴顺时针方向为正。 航速角:Xo轴到V的夹角,顺时针为正。 2、水动力导数(回答要全面)?水动力模型? 水动力导数的物理意义(位置导数、旋转导数、角加速度导数以及舵导数,要求会分析其正负号) 答:水动力导数: 水动力模型: 3. 船舶运动稳定性包含哪三部分?(直线、方向、位置,其相互之间的关系) 答:直线稳定性:船舶受瞬时扰动后,最终能恢复直线航行状态,但航向发生变化;方向稳定性:船舶受扰后,新航线为与原航线平行的另一直线; 位置稳定性:船舶受扰后,最终仍按原航线的延长线航行。 显然,具有位置稳定性必同时具有方向和直线稳定性,具有方向稳定性必同时具有直线
小水线面三体船初探 班级20080112 学号2008011229 姓名陶伯政
摘要 进入21世纪以来,各种高性能船舶的研究越来越多,在小水线面三体船方面,主要集中在细长型小水线面三体船(高速小水线面三体船)及小水线面小水线面三体船上。随着人们对船舶的稳性、耐波性等性能的要求越来越高,小水线面三体船作为一种高性能新船型,正在引起人们极大的关注。由于其独特的船型、优良的性能及在主要技术性能方面的诸多优势,小水线面三体船必将在军用、民用市场有广阔的应用前景。 关键词:高速三体船小水线面三体船 一、发展概况 当代小水线面三体船的研究己有30多年的历程,直到上世纪90年代中期以后高速小水线面三体船(细长型)的研究才取得了较大发展.这期间国内外高速小水线面三体船(细长型)的研究主要集中在水动力理论、模型试验、船型优化以及概念设计等方面,也有少量关于结构强度方面的文献。小水线面三体船其水下部分是由一个主船体和两个小侧体组成的,两个侧体一般对称地摆放在主船体的两侧,三个船体均为细长船体,通过连接桥将主体和两个侧体连接成一体。 图1.1 小水线面三体船中横剖面 图1.2 小水线面三体船局部模型
国内的小水线面三体船研究起步较晚,始于上世纪90年代末期。国内在小水线面小水线面三体船方面的研究还较少,上海交通大学进行了一些初步的阻力研究和试验。一批与哈尔滨工程大学为首的高校和科研院所主要通过模拟或是模型探索性研究小水线面三体船的耐波阻力,操纵性。而在抗沉性、材料,前沿技术方面限于各种原因而研究较少。下图1.3为我校设计制作的细长型高速小水线面三体船模型。 图1.3 高速小水线面三体船模型试验 如图1.5 为瑞典QinetiQ公司和OTG公司设计的Tri/SWA TH模型图。 图1.4 Tri/SWA TH模型图 到目前为止,世界范围内己经出现了多艘小水线面三体船型的实船。2000年5月6日,英国海军一艘名为“海神”号(RVTriton)的三体试验舰建成并顺利下水,三体舰船第一次从纸上浮到海上。该舰长97米,宽22.5米,排水量1100吨,最高航速20节,续航力3000海里。图1.6英国海军“海神”号三体试验舰
第三章飞机的稳定性和操纵性 飞机的稳定性 在飞行中,飞机会经常受到各种各样的扰动,如气流的波动、发动机工作不稳定、飞行员偶然触动驾驶杆等。这些扰动会使飞机偏离原来的平衡状态,而在偏离以后,飞机能否自动恢复原状,这就是有关飞机的稳定或不稳定的问题。 飞机的稳定性是飞机本身的一种特性,与飞机的操纵性有密切的关系。例如,飞行员操纵杆、舵,需要用力的大小,飞机对杆、舵操纵的反应等,都与飞机的稳定性有关。因此,研究飞机的稳定性是研究飞机操纵性的基础。 所谓飞机的稳定性,就是在飞行中,当飞机受微小扰动而偏离原来的平衡状态,并在扰动消失以后,不经驾驶员操纵,飞机能自动恢复原来平衡状态的特性。 纵向稳定性 飞机的纵向稳定性是指飞机绕横轴的稳定性。 当飞机处于平衡飞行状态时,如果有一个小的外力干扰,使它的攻角变大或变小,飞机抬头或低头,绕横轴上下摇摆(也称为俯仰运动)。当外力消除后,驾驶员如果不操纵飞机,而靠飞机本身产生一个力矩,使它恢复到原来的平衡飞行状态,我们就说这架飞机是纵向稳定的。如果飞机不能靠自身恢复到原来的状态,就称为纵向不稳定的。如果它既不恢复,也不远离,总是上下摇摆,就称为纵向中立稳定的。飞机的纵向稳定性也称为俯仰稳定性。 飞机的纵向稳定性由飞机重心在焦点之前来保证。影响飞机纵向稳定性的主要因素有飞机的水平尾翼和飞机的重心位置。下面,我们首先来看一下水平尾翼是如何影响飞机的纵向稳定性的。
当飞机以一定的攻角作稳定的飞行时,如果一阵风从下吹向机头,使飞机机翼的攻角增大,飞机抬头。阵风消失后,由于惯性的作用,飞机仍要沿原来的方向向前冲一段路程。这时由于水平尾翼的攻角也跟着增大,从而产生了一个低头力矩。飞机在这个低头力矩作用下,使机头下沉。经过短时间的上下摇摆,飞机就可恢复到原来的飞行状态。 同样,如果阵风从上吹向机头,使机头下沉,飞机攻角减小,水平尾翼的攻角也跟着减小。这时水平尾翼上产生一个抬头力矩,使飞机抬头,经过短时间的上下摇摆,也可使飞机恢复到原来的飞行状态。 除水平尾翼外,飞机的重心位置对纵向稳定性也有较大的影响。重心靠后的飞机,其纵向稳定性要比重心靠前的差。其原因是:重心与焦点距离小攻角改变时产生的附加力矩减小。对于重心靠后的飞机,当飞机受扰动而增大攻角时,机翼产生的附加升力是使机头上仰,攻角进一步增大,形成不稳定力矩。这时主要靠水平尾翼的附加升力,使机头下俯,攻角减小,保证飞机的纵向稳定性。 方向稳定性 飞机的方向稳定性是指飞机绕立轴的稳定性。 飞机的方向稳定力矩是在侧滑中产生的。所谓侧滑是指飞机的对称面与相对气流方向不一致的飞行。它是一种既向前、又向侧方的运动。 飞机带有侧滑时,空气则从飞机侧方吹来。这时,相对气流方向与飞机对称面之间的夹角称为“侧滑角”,也称“偏航角”。 对飞机方向稳定性影响最大的是垂直尾翼。另外,飞机机身的侧面迎风面积也起相当大的作用。其它如机翼的后掠角、发动机短舱等也有一定的影响。 当飞机稳定飞行时,不存在偏航角,处于平衡状态。如果有一阵风突然吹来,使机头向右偏(此时,相对气流从左前方吹来,称为左侧滑),便有了偏航角。阵风消除后,由于惯性作用,飞机仍然保持原来的方向,向前冲一段路程。这时相对风吹到偏斜的垂
小水线面双体船的发展与前景 大连海洋大学 12-1班 摘要:小水线面双体船的优良性能在近些年里得到验证和发展,在特殊作业和高舒适性上已经得到认可。据不完全统计,截止2000年末,全球已建成的小水线面双体船 为57艘,小水线面双体船的发展有足够的市场和潜力。 引言 近年来,随着海上运输方式的多样化以及人类对海洋资源的积极开发,对船舶性能的要求也逐渐发生变化。就海上运输来说,由过去只注重载荷性能和静水中快速性能而一味追求大型化和高速化的倾向,转为注重提高船舶在波浪中的性能。在客渡轮方面,为实现定期航行、高效运输以及舒适乘坐,提高船舶的耐波性和节能被摆在重要位置;在海洋开发方面,为了能在高海情下的广阔海域进行海洋调查、观测、作业以及海洋平台输送人员等,迫切需要在波浪中具有较高安全性、稳定性和舒适性的多用途船舶;在军舰方面,为了使舰艇在宽阔的海域和恶劣的海情下执行任务,也迫切需要有波浪中能达到高性能要求的舰船。小水线面双体船(small water-plane-area twin hull ,SWATH)正是这样一种耐波性能极其优良,中、高速下阻力小,甲板面积相当宽阔,可以完成多种使命,满足各种航海要求的新船型。 小水面双体船又称为半潜式双体船(semi-submerged catamaran ,SSC),其设计概念1905年由美国人Nelson提出,1932年Faust提出了SWATH船的初步设想、,1946年加拿大人Creed、1967年美国人Leopold进一步予以完善并申请专利。这些设计在低速和中速时性能是较好的,但是都没有解决纵向运动稳定性这个航行安全至关重要的问题。1971年兰Lang提出了一个接近于现有小水线面双体船的设计方案,他用一根翼型剖面的横梁将两个片体连接起来,并借此保证船的纵向运动稳定性。1973年,世界上第一艘小水线面双体船“卡玛林诺”号与此方案十分相似。一些近海的半潜式钻井平台的设计也应用了小水线面双体船的概念 “卡玛林诺”号和“海鸥”号(标题) 1969年开始,美国海军船舶研究与发展中心DTNSRDC和美国海军船舶工程中心NAVSEC进行一系列小水线面双体船的性能研究和方案设计工作。与此同时,美国的一些大学和私营公司做了不少小水线面双体船的研究工作,在这些研究成果的基础上,美国海军水下中心NUC于1970年开始了第一艘小水线面双体船的设计并于1972年在马里兰州柯蒂斯海湾的海岸警卫队船厂开工建造。这艘双体船总长26.80米,甲板长23.43米,宽19.27
操纵性 1.船舶操纵性定义及研究内容 操纵性:船舶按照驾驶者的意图保持或改变其运动状态的性能。即船舶能保持或改变航速、航向和位置的性能。 研究内容:航向稳定性、回转性、转首性及跟从性、停船性能。 2.船舶附加质量的含义及与物理质量比例的大致范围 附加质量:附加惯性力与船的加速度成比例,其比例系数称为附加质量。(作不定常运动的船舶,除了船体本身受到与加速度成比例的惯性力外,同时船体作用于周围的水,使之得到加速度,根据作用与反作用原理,水对船体存在反作用力,这个反作用力称为附加惯性力。) 附加质量:m x ≈(0.05~0.15)m m y ≈m z ≈(0.9~1.2)m 附加惯性矩Jxx ≈(0.05~0.15)Izz Jyy ≈(1~2)Izz Jzz ≈Iyy I 是质量惯性矩 3.漂角、航向角和水动力中心的含义 漂角:船舶重心处的速度矢量→ V 与x 轴正方向的交角称为漂角β。并规定速度矢量转向x 轴顺时针方向为正。 航向角:船首指向的方向和船舶在水面上的真实轨迹之间的夹角。 4动坐标系统速度转换到大地坐标系统公式:φφsin cos 00Y X X +=φφsin cos 00X Y Y -= 5、线性水动力导数Yv,Nv,Yr,Nr 的物理意义 水动力的位置导数Yv 是一个较大的负值。 水动力力矩的位置导数Nv 是一个不大的负值。 指的是v 引起的升力系数/力矩系数 水动力的旋转导数Yr 的绝对值不是很大,其符号由船型决定,可正可负。 水动力矩的旋转导数Nr 是一个很大的负值 。指的是r 引起的水动力系数/水动力矩系数 6、线/角加速度水动力导数的物理意义及数值大小判断 水动力的线加速度导数.V Y 是一个相当大的负值。指的是附加质量 水动力矩的线加速度导数.V N 是一个不大的数值,其符号取决于船型。指的是由V ? 引起的附加惯性力矩系数 水动力的角加速度.r Y 是一个较小的值,其符号取决于船型 水动力矩的角加速度导数.r N 是一个很大的负值。指的是回转加速度r ? 引起的船舶附加惯性力系数/惯性力矩系数 7、野本方程及物理意义 野本方程:. r T +r=K δ 物理意义δ:船舶的惯性力矩、阻尼力矩和舵力矩的作用下,进行的缓慢转,首运动,可以 用下列式子近似表示:.r I +Nr=M δ N 为船舶回转中的阻尼力矩系数,I 为船舶回转中的惯性力矩系数,M 为舵产生的转首力矩系数。T=I/N,K=M/N 由此可知,T 是惯性力矩系数与阻尼力矩系数之比,T 值大,表示船舶运动过程中收到的惯性力矩大,阻尼力矩小。而K 是舵转首力矩系数与阻尼力矩系数之比。K 值大,表示舵产生的转首力矩大,而阻尼力矩小。
船舶操纵性:是指船舶按照驾驶者的意图保持或改变其运动状态的性能,即船舶能保持或改变其航速、航向和位置的能力。航向稳定性:表示船舶在水平面内的运动受扰动而偏离平衡状态,当扰动完全消除后能保持其原有平衡状态的性能。 回转性:表示船舶在一定舵角作用下作圆弧运动的性能。转首性:表示船舶应舵转首并迅速进入新的稳定状态的性能. 运动稳定性与机动性制约:小舵角下的航向保持性 、中舵角下的航向机动性 、大舵角下的紧急规避性 固定与运动坐标系的关系: 漂角:速度V 与OX 轴正方向的夹角β。舵角:舵与OX 轴之间的夹角δ。舵速角:重心瞬时速度矢量与O 0X 0轴之间的夹角ψ0。 线性水动力导数意义:船舶作匀速直线运动,在其他参数不变时,改变某一运动参数所引起的作用于船舶的水动力或矩对该参数的变化率。水动力导数:Xu= Yu= 通常可称对线速度分量u 的导数为线性速度导数.如:Xu 等。对横向速度分量v 的导数为位置导数,如:Yv 、Nv 等。对回转角速度r 的导数为旋转导数,如:Nr 、Yr 等。对各加速度分量和角加速度分量的导数为加速度导数Xu 。 ,对舵角δ的导数为控制导数,如:Y δ等。 稳定性:对处于定常运动状态的物体(或系统),若受到极小的外界干扰作用而偏离原定常运动状态;当干扰去除后,经过一定的过渡过程,看是否具有回复到原定常运动状态的能力。若能回复,则称原运动状态是稳定的。直线稳定性:船舶受到瞬时扰动以后,重心轨迹最终恢复成为一条直线,但航向发生了变化。方向稳定性:船舶受到的瞬时扰动消失以后,重心轨迹最终成为原航线平行的另一直线。位置稳定性:船舶受到瞬时扰动,当扰动消失以后,重心轨迹最终恢复成为与原来航线的延长线。 稳定衡准数:C=-Y V (mx G u 1-N r )+N V (mu 1-Y r );C>0 表示船舶在水平面的运动具有直线稳定性;C<0 则不具有直线稳定性。 影响航向稳定性的因素:(1)为改善其航向稳定性,应使Nr 、Yv 二者的负值增加,从C 的表达式可见,此二者之乘积的正值就越大,显然有利于改善稳定性。(2) Nv 对稳定性的影响较大。只要Nv 为正值,船舶就能保证航向稳定性 (3)若沿船纵向设置升力面(如鳍、舵等能产生升力的物体),则将其加在首或尾部都能使Nr 的负值增加,但若加在首部会使Nv 增加负值,而加在尾部会使Nv 变正,故升力面设置在尾部可使Nr 负值增加的同时又使Nv 值变正,故对航向稳定性的贡献比设置在首部要大。与几何形体的关系:增加船长可使Nr 负值增加,增加船舶纵中剖面的侧面积可使Nr 、Yv 的负值增加,增加Nv 的有效方法是,增加纵中剖面尾部侧面积,可采用增大呆木,安装尾鳍,使船产生尾倾等。 船舶回转性各参数:反横距:从船舶初始的直线航线至回转运动轨迹向反方向最大偏离处的距离为S1。正横距:从船舶初始直航线至船首转向90°时,船舶重心所在位置之间的距离为S2。该值越小,则回转性就越好。纵距:从转舵开始时刻船舶重心G 点所在的位置,至船首转向90°时船舶纵中剖面,沿原航行方向计量的距离S3。其值越大,表示船舶对初始时刻的操舵反应越迟钝战术直径:从船舶原来航线至船首转向180°时,船纵中剖面所在位置之间的距离DT 。其值越小,则回转性越好。定常回转直径:定常回转阶段船舶重心点圆形轨迹的直径D 进程R ′:自执行操舵点起至回转圈中心的纵向距离;R′=S3-D/2;它表示船舶对舵作用的应答性,R′越小则应答性越好 回转过程的三个阶段: 转舵阶段:指从开始转舵到舵转至规定角度δ0为止。运动特点:V 。 ≠0 ,r 。≠0 ,v=r=0;过渡阶段:指从转舵结束起到船舶进入定长回转运动为止。运动特点:V 。 、r 。 、V 、r 都不为零且随时间发生变化。 定长回转阶段:当作用于船体的力和力矩相平衡时,船舶就以一定的侧向速度V 和回转角速 度r 绕固定点作定长圆周运动。特点:V 。=r 。 =0,v 、r 为常数。 枢心点P :船舶回转过程中,在船上还存在一个横向速度分量为零的点,称为枢心点p 。枢心点是船舶纵中线上唯一的漂角为零的点;枢心点仅仅是因为船舶转向而存在的;船舶加速时,枢心点会向船舶运动的方向移动 。反操现象:是船舶不具有直线稳定性的一种特征,回转性与稳定性相矛盾。回转衡倾的原因:船舶回转过程中,船体上承受的侧向力其作用点高度各不相同,于是形成对ox 轴的倾侧力矩,产生回转横倾。 野本模型:T r 。+r 。 =K δ 其中 K 、T 为操纵性指数。用参数K 评估回转能力。大K 意味着回转性能好。用参数T 评估直线运动稳定性、初始回转能力和航线改变能力。小T 意味着好的直线运动稳定性、初始回转能力和航线改变能力。K= T= 希望船舶有大K 、小T (但相互矛盾)。T 的单位是S ,K 的单位是S -1 转首性指数p :表示操舵后,船舶行驶一倍船长时,由单位舵角引起的首相角改变量。 诺宾指数:若平>0.3则转首性满足要求。与船体惯性 回转阻尼 舵的回转力矩相关。 操纵性试验:分为模型试验和实船试验两种,模型试验又可分为自由自航模操纵性试验和约束模操纵性试验两种。船舶固有操纵性的试验方法:回转试验、回舵试验、零速启动回转试验、Z 试验、螺线与逆螺线试验、航向改变试验、制动试验和侧向推进装置试验。 回转试验: 1首先在预定的航线上保持船舶直航和稳定航速。 2在开始回转前约一个船长的航程范围内,测量船舶的初始参数,如:航速u 、初始航向角、初始舵角、螺旋桨的初始转速n 0等。 3以尽可能大的转舵速度将舵操至规定舵角δ0并把定舵轮。随后开始测量船舶运动参数随时间的变化,包括船舶的轨迹、航速、横倾角及螺旋桨的转速等。 4待首向角改变540°时,即可结束试验。 螺线试验:评价船舶的直线稳定性,在直航中给船舶以扰动,通过观察扰动去掉后船舶是否能够恢复直航来测定直线稳定性。 1.首先在预定航线上保持匀速直航,并在操舵前测出初始航速、舵角及螺旋桨转速。 2. 执行操舵,以尽可能快的速度将舵转至一舷规定的舵角(如右舷15°) 并保持舵角不变,使船进入回转运动,待回转角速度r 达到稳定值时,记录下r 和相应的舵角δ值。 3. 改变舵角值重复以上过程,测出定常r 值及相应δ值。舵角从右舷15°开始,并按下列次序改变:右15°→右10°→右5°→右3°→右1°→ 0°→左1°→左3°- 左5°→左10°→左15° Z 形操舵试验:测定船舶操舵响应的一种操纵性试验法。进行Z 形试验时,先使船以规定航速保持匀速直航,然后将舵转至右舷规定的舵角(如右舷10°) ,并保持之,则船即向右转向,当首向角达到某一规定的舵角值时(如右舷10°) 立即将舵向左转至与右舵角相等的左舵角(左舷10°) ,并保持之。当反向操舵后,船仍朝原方向继续转向,但向右转首角速度不断减小,直至消失。然后船舶应舵地再向左转向,当左转首向角与舵角值相同时,再向右操舵至前述之右舵角。该过程如此继续,到完成五次操舵为止。 航向改变试验是研究船舶在中等舵角时的转向性能的一种较简易而实用的试验方法。 回舵试验是船舶航向稳定性的定义试验。该试验方法实质为回转试验(或螺线试验)的延续 操纵性船模试验中必须满足的相似条件:1使自航船模与实船保持几何形状相似;2通常保持无因次速度、加速度参数相等,即u/V 、v/V 、rL/V 等相等;3在水动力相似方面,只满足傅汝德数Fn 相等,保证二者重力相似。 实际进行自航模试验时保持:船体几何形状相似;质量、重心位置及惯性矩相似;在决定模型尺度时要考虑临界雷诺数的要求;选择航速时满足傅汝德数相等;机动中保持舵角相等。 船舶固有操纵性指标:直接的判据:它是由自由自航试验直接测定的参数;间接的判据:如野本的K 、T 指数,诺宾的P 指数 操纵性衡准:1回转能力,由回转试验确定。船舶以左(右)350 舵角回转时,回转圈的纵距应
双体船简介 双体船是船舶的一种,就是把两个船体横向以甲板固定在一起。有时也会把三个船体一起串联,称为三体船。双体船的英文叫Catamaran,此词源自泰米尔文。双体船设计虽然是一种相对较新的设计,常见于竞技及娱乐用的船只设计;但其实在太平洋上的波利尼西亚,双体船的使用己经历了数个世纪。 人类最早使用双体船是由于发现将两艘船横向连接在一起,可以从内河到海上航行而不容易翻船,早期曾将这种方法用在帆船上,建造了双体帆船,这种帆船在海上可以承受较大的风浪。在此基础上,人们又发现双体船与同样吨位的单体船相比,具有更大的甲板面积和舱容,因此而被用于货船。20世纪60年代后,随着海上高速客运的迅速发展,高速双体船由于有宽大的甲板面积、空间和便于豪华装饰而被普遍看好,成为近几十年来高性能船中发展最快、应用最广、建造数量最多的一种。 典型的高速双体船由两个瘦长的单体船(称为片体)组成,上部用甲板桥连接,体内设置动力装置、电站等设备,甲板桥上部安置上层建筑,内设客舱、生活设施等。高速双体船由于把单一船体分成两个片体,使每个片体更瘦长,从而减小了兴波阻力,使其具有较高的航速,目前其航速已普遍达到35-40节;由于双体船的宽度比单体船大得多,其稳定性明显优于单体船,且具有承受较大风浪的能力;双体船不仅具有良好的操纵性,而且还具有阻力峰不明显、装载量大等特点,因而被世界各国广泛应用于军用和民用船舶。与同吨位的单体船相比,双体船的总宽度较大,因而往往有更大的甲板面积和舱室容积,尤其适合于装载那些体积很大而重量不大的低密度货物,可以具有较高的运输效率。将单一船体分成两个,可以使每个船体更瘦长,从而有可能减小船的兴波阻力,尤其在高速时,兴波阻力有较大幅度的降低。 以前的双体船多为双体风帆,现在多为动力双体船。 双体风帆和单体风帆相比,双体风帆的速度较高。基本上,多体船比单体的速度较高,原因是:双体船每个船身的横切面比单体薄,水阻较少;双体船的龙骨无需配重,因此较轻;双体船的整体舰寛较阔,因此较为稳定,亦可张更https://www.doczj.com/doc/f7454096.html,多的帆;因为双体船较为稳定,故此大风时较大机会保持垂直。 为进一步改善高速双体船的综合性能,人们在高速双体船的基础上派生了若干新型的双体船型,主要著名的有小水线面双体船和穿浪双体船等。 动力双体船使用两个瘦长的船体,多数配合涡轮喷气发动机的推动,以喷射水流的方式,把水快速推向船后,根据牛顿第三定律,可获得巨大的向前推进力(反作用力),比采用普通的螺旋桨推动更快速,而在高速时,瘦长船身的阻力更会大幅的降低。 美国军方的大型高速双体船和双体风帆一样,拥有较为稳定,水阻少,较轻,不易翻船等优点。是近年发展较快的一种,经常被应用在渡轮及军事运输上。 由于双体船的船体较长,在高速行驶时兴波阻力比单体小,而且舰宽较阔亦较为稳定。用以运载低密度的货物(例如作渡轮、观光船)十分合适。自60年代后开始出现不同的双体船设计。现代高性能的双体船有如下四类:一、小水线面双体船;二、穿浪双体船;三、高速双体船;四、复合型双体船。 小水线面双体船(SmallWaterPlaneAreaTwinHull,SWATH):浮力由两个样子好像是水雷,全浸在水中的船身提供。水线正好在连接全浸船身跟水上船体的支架部分。换一种说法,潜没于水中的鱼雷状下体、高于水面的平台(上体)和穿越水面联接上下体的支柱三部分组成,其优点在于水线面面积较小,受波浪干扰力较小,在波浪中具有优越的耐波性。另外,还具有宽阔的甲板面和充裕的使用空间。但也存在船体结构复杂,对重量分布较为敏感等问题。
第一章船舶操纵基础理论 通过本章的学习,要求学员概念理解正确,定义描述准确,对船舶操纵性能够正确评估,并具有测定船舶操纵性能的知识。 根据船舶操纵理论,操纵性能包括: 1)机动性(旋回性能和变速运动性能) 2)稳定性(航向稳定性) 第一节船舶操纵运动方程为了定量地描述船舶的操纵运动,我们引入船舶操纵运动方程,用数学方法来讨论船舶的运动问题。 一、船舶操纵运动坐标系 1.固定坐标系Ox0y0z0 其原点为O,坐标分别为x0,y0,z0,由于我们仅讨论水面上的船舶运动,因此,该坐标系固定于地球表面。 作用于船舶重心的合外力在x0,y0轴上的投影分别为X0和Y0 对z0轴的合外力矩为N
2. 运动坐标系Gxyz 其原点为点G (船舶重心),坐标分别为x ,y ,z ,该坐标系固定于船上。 这主要是为了研究船舶操纵性的方便而建立的坐标系。 x ,y ,两个坐标方向的运动速度分别为u 和v ,所受的外力分别为X 和Y , 对z 轴的转动角速度为r ,z 轴的外力矩为N 。 二、 运动方程的建立 根据牛顿关于质心运动的动量定理和动量矩定理,船舶在水面的平面运动可由下列方程描述: y 0
??? ??===? Z og o og o I N y m Y x m X 该式一般很难直接解出。为了方便,将其转化为运动坐标系表示,这样可以使问题大为简化。经过转换,得: ?? ? ??=+=-=r I N ur v m Y vr u m X Z )()( 该方程看似复杂,但各函数和变量都与固定坐标系没有关系,因此,可以使问题大为简化。 三、 水动力和水动力矩的求解 对于上述方程中的水动力和水动力矩可表示为: ?? ? ??===),,,,,,(),,,,,,(),,,,,,(δδδr v u r v u f N r v u r v u f Y r v u r v u f X N Y X
高速双体船的总体性能 摘要:顾名思义,我们一般把由两个单船体横向固联在一起而构成的船称为双体船。高速双体船由于把单一船体分成两个片体,使每个片体更瘦长,从而减小了兴波阻力,使其具有较高的航速,目前其航速已普遍达到35-40节;由于双体船的宽度比单体船大得多,其稳定性明显优于单体船,且具有承受较大风浪的能力;双体船不仅具有良好的操纵性,而且还具有阻力峰不明显、装载量大等特点,因而被世界各国广泛应用于军用和民用船舶。以船舶结构力学、静力学、流体力学为基础,运用计算方法,简单分析高速双体船的结构性能,从而证明双体船在未来的实用性。 关键字:高速双体船;结构力学;结构性能;结构材料 随着科学技术的发展和生活水平的提高,以及军事应用方面的要求,高性能船在世界上获得了蓬勃的发展。在50至60年代,水翼船优先得到了发展;在60年代中后期,气垫船进入使用领域,占领了部分水上高速客运市场;在70年代后期,高速双体船迅速崛起,并在北欧地区首先得到发展,澳大利亚后来居上。据并不完全统计,目前全世界已有40多个国家和地区的200多家公司经营水上高速客运业务。双体船作为高性能船舶的重要成员之一,其发展尤其令人瞩目。 高速双体船是一种集优良的耐波性、快速性、稳性和回转等各种航海性能于一身的高性能船型。它既保留了小水线面双体船的低阻,高耐波性及常规双体甲板面积宽敞的优点,同时融会变通了深V船型的特点,克服了小水线面双体的片体无储备浮力、空间狭小和要求复杂的航态控制系统和传动系统等缺点克服了常规双体船的片体干舷高储备浮力过大,对波浪响应敏感,船体纵摇和摇周期接近,易出现“螺旋状”摇摆而引起乘客不适等缺点。 1.高速双体船的性能特点[1] 双体船,即由两条船型一样,尺度相同的船体又名片体,中间采用连结桥将它们连结起来的一种船型。这类船舶的一大特点是甲板宽敞、平坦。在每个片体尾部各装一台主机和推进器石直线航行时,左右两只螺旋桨可同时运转发出推力。双体船与相同排水量的其他类型单体船相比,它的甲板面积及舱容较大,约比单体船增大左右。用于载客时,它宽大的甲板面积便于布置较多生活条件较舒适的客舱,与同类单体船相比载客能力增加一倍以上,所以双体船的经济效益显然较高。双体船左右两个片体的船型瘦长,有利于船舶的航向稳定性‘此外两个螺旋桨与舵分别位于两个片体的尾部,并且横向间距较大,故在一定的操舵角和正车、倒车的情况下可提供大的回转力矩与回转角速度,使船的操纵性与回转性都特别好。双体船由于宽大,有利于船舶的横稳性,并且横摇角也小,这样就增加了船舶航行时的安全感,而且航行时较平稳。双体船两个片体之间距离如果选择恰当,还可以减少船舶航行时的阻力,提高航速。 双体船用作客船,它的单位客位造价较低,所以双体船适合于沿海、内河及湖泊中的客船。除此之外,双体船也适用于汽车渡船、工程船、渔船、海洋调查船和钻探船等。正是由于上述其它船型不可比的优点,使得双体船能够迅速兴起,并广泛占领高性能船舶市场。据不完全统计,目前高速双体船在高性能船舶市场占有率达40%以上,高居高性能船的首位。 1.1 甲板面积大 高速双体船单位排水量甲板面积比单体船大50%,如果考虑到双体船可以有效地增加上层建筑层次,上述比例可达100%,而不用担心稳性不够。对需要足够甲板面积和追求多层次上层建筑的客船、游览船、渡船来讲,双体船具有独特的优越性。高速双体船连接桥增加了大量甲板面积,但亦带来了钢料重量明显增加,因此,双体船不宜于要求载货能力大的货船和冷藏船。