第二章 摄像机成像中的若干重要空间关系
摄像机模拟人眼成像几何把三维场景空间关系投影到二维图像上,这一过程可以利用射影几何来刻划。借助射影几何以及齐次坐标、矩阵等代数工具,我们可以描述三维空间到二维图像的成像原理、两幅图像之间的极几何关系、空间中的特殊对象(例如平面等)的投影性质以及由图像重构三维空间物体形状的计算等。由于摄像机成像原理、极几何以及多视图几何等是计算机视觉研究的重要理论基础,因此有大量文献和著作给予讨论,其中比较系统的有Hartley 等所著的“Multiple View Geometry in Computer Vision”
[1]
、马颂德等所著的“计算机视觉—计算理论与算法基础”
[2]
等。
在本章中,我们仅就后续章节所用到的若干重要空间关系作一个扼要介绍。 2.1 视觉坐标系与成像几何原理
2.1.1 图像坐标系、摄像机坐标系和世界坐标系
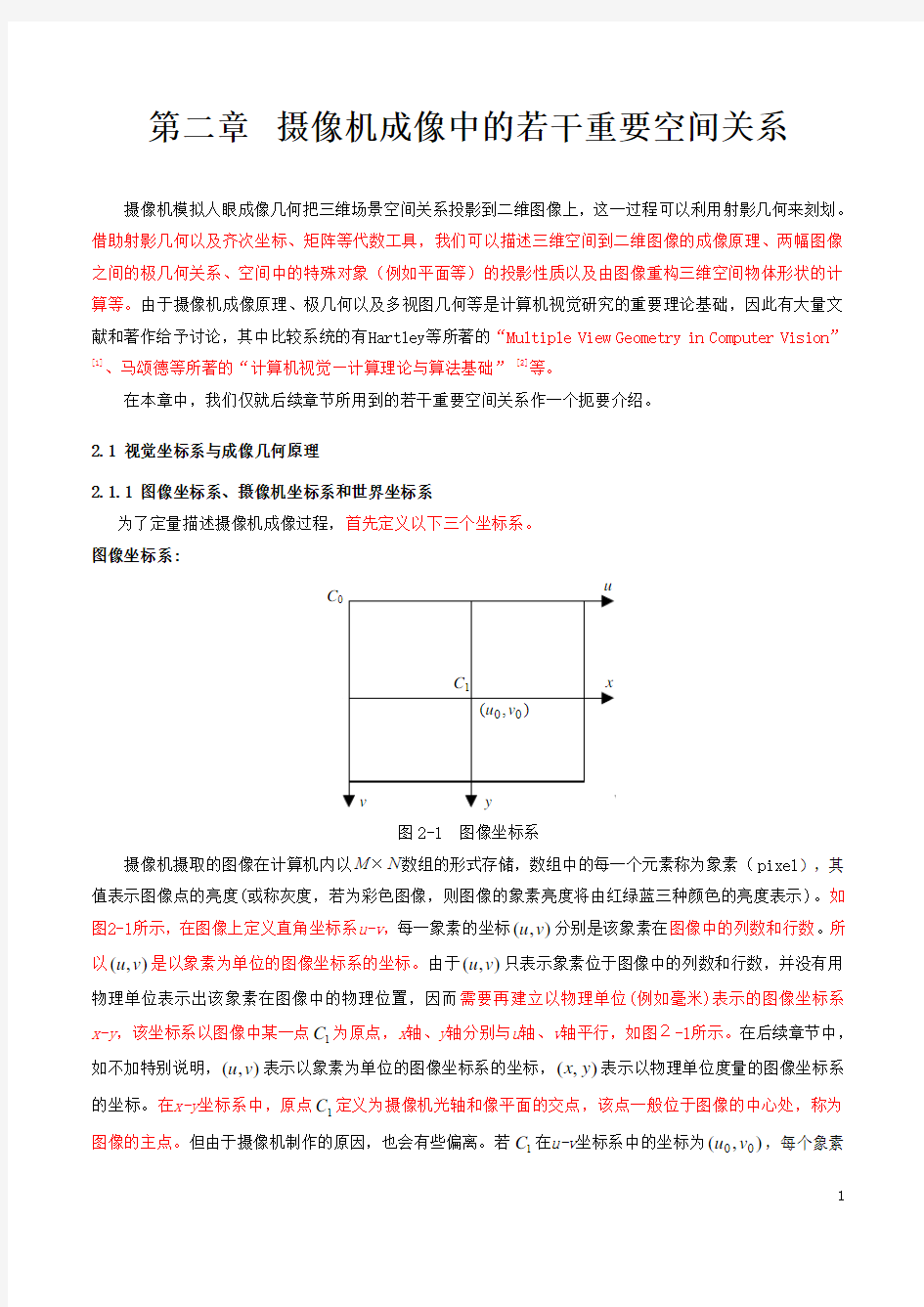
为了定量描述摄像机成像过程,首先定义以下三个坐标系。 图像坐标系:
C
图2-1 图像坐标系
摄像机摄取的图像在计算机内以M×N数组的形式存储,数组中的每一个元素称为象素(pixel ),其值表示图像点的亮度(或称灰度,若为彩色图像,则图像的象素亮度将由红绿蓝三种颜色的亮度表示)。如图2-1所示,在图像上定义直角坐标系u-v ,每一象素的坐标),(v u 分别是该象素在图像中的列数和行数。所以),(v u 是以象素为单位的图像坐标系的坐标。由于),(v u 只表示象素位于图像中的列数和行数,并没有用物理单位表示出该象素在图像中的物理位置,因而需要再建立以物理单位(例如毫米)表示的图像坐标系
x-y ,该坐标系以图像中某一点1C 为原点,x 轴、y 轴分别与u 轴、v 轴平行,如图2-1所示。在后续章节中,
如不加特别说明,),(v u 表示以象素为单位的图像坐标系的坐标,),(y x 表示以物理单位度量的图像坐标系的坐标。在x-y 坐标系中,原点1C 定义为摄像机光轴和像平面的交点,该点一般位于图像的中心处,称为图像的主点。但由于摄像机制作的原因,也会有些偏离。若1C 在u-v 坐标系中的坐标为),(00v u ,每个象素
在x 轴和y 轴方向上的物理尺寸为dx ,dy ,则图像中任意一个像素在两个坐标系下的关系如下:
用齐次坐标和矩阵形式可表示为:
(2.1) 逆关系可写为:
??
??
?
???????????????--=??????????110000100v u dy v dy dx u dx y x (2.2)
摄像机坐标系:
所谓成像模型是指三维空间中的物体到像平面(视平面)的投影关系。理想的投影成像模型是光学中的小孔成像模型,图2-2是小孔成像模型的示意图。在此模型中,摄像机将场景点P 经过C 点投影到像平面上的像点m ,其中C 点称为摄像机光心,c X 轴和c Y 轴与图像坐标系的x 轴和y 轴平行,c Z 轴为摄像机的光轴,和像平面垂直,光轴与像平面的交点为1C ,由点C 与c c c Z Y X ,,轴组成的直角坐标系称为摄像机坐标系,记为c c c Z Y X C -,f 为摄像机焦距。 世界坐标系:
由于摄像机可安放在环境中的任何位置,我们在环境中还选择一个基准坐标系来描述摄像机的位置,并用它描述环境中任何物体的位置,该坐标系称为世界坐标系,记为w w w w Z Y X O -,如图2-3所示。摄像机坐标系和世界坐标系之间的关系可用旋转矩阵R 与平移向量t 来描述。因此,如果空间中某一点P 在世界坐标系和摄像机坐标系下的齐次坐标分别为T
w w w Z Y X )1,,,(与T
c c c Z Y X )1,,,(,则存在如下关系:
?????
???????=?????
?
????????????=????
????????111011
w w w w w w T
c c c Z Y X Z Y X Z Y X M t R
(2.3)
其中R 是33?旋转矩阵,t 是三维平移向量,T
)0,0,0(=0,1M 是44?矩阵,表示两个坐标系之间的关系。
世界坐标系
图2-3 摄像机坐标系与世界坐标系
问题:如何表示图像坐标),(v u 与),,(w w w Z Y X 之间的关系? 2.1.2 成象几何原理
从小孔成像模型(如图2-2)中,不难看出,摄像机坐标系与成像平面坐标系之间存在以下关系:
其中,),(y x 为像点m
在像平面坐标系下的坐标,),,(c c c Z Y X 为空间点P 在摄像机坐标系下的坐标。),(
y x 和
),,(c c c Z Y X 分别用齐次坐标表示为)1,,(y x 和)1,,,(c c c Z Y X ,上式可写成矩阵形式:
????
????????????????=?????
?
????????????????=??????????c c c c
c c Z Y X f f
Z Y X f f y x 10
0000100010
00001μ (2.4) 其中μ为常数因子。这是摄像机最理想的简单模型。 将(2.4)代入(2.1)式:
=??????????1v u μ?????
?
????100/100/100v d u d y x
???????????????
?????c c c Z Y X f f
10
0000????
?
???????????????=c c c y x
Z Y X v d f u d f 10
/00/00 (2.5) 令
????
?
?????=10
000v f u f v u
K T
c c c T Z Y X 1v u )
,,(),,(==c P m (2.6)
则(2.5)式可简略地表示为:
c KP m =μ (2.7)
其中:x u d f f /=、y v d f f /=分别称为u 轴与v 轴方向的尺度因子,),(00v u 称为主点坐标,矩阵 K 称为摄像机内参数矩阵,通常我们称它为四参数模型。
如果离散化后像素不是矩形方块或像平面不与光轴正交,则使用下述五参数模型:
????
?
?????=10
00v f u s f v u
K (2.8) 其中:s 称为畸变因子,这是摄像机的一般线性内参数模型。 像平面归一化坐标
如果已知内参数矩阵K ,对像平面作坐标变换:
????
?
?????=??????????-1v u 1v u 1n n K (2.9) 我们称????
?
?????=1n n n v u m 为像平面的归一化(规范化)坐标。
此时,有
c n P KP K m c 1==-μ
使用归一化坐标,相当于内参数矩阵是单位矩阵,即摄像机的焦距为1。 2.1.3 世界坐标系与摄像机投影矩阵
以上讨论都是以摄像机坐标系为参考系。通过式(2.3)和(2.7),我们可以得到以世界坐标系表示的P 点坐标与其像点m 坐标),(v u 的关系。由式(2.3)可得
??
?
????????
?=??????111w T c P 0t R P 即
t RP P w c += (2.10)
其中,T
w w w Z Y X ),,(=w P ,式(2.10)表示摄像机坐标系与世界坐标系之间的运动为(R ,t ),R 为旋转矩阵表示旋转分量,t 是一个三维向量表示平移分量。将(2.10)代入(2.7)式,我们有:
Kt KRP m w +=μ (2.11)
写成矩阵形式:
[]??
?
???=1w P t R K m μ (2.12)
其中:??
?
???1w P 称为空间点的齐次(世界)坐标,式(2.12)也称为摄像机投影方程。
记
[]t R K Q = (2.13)
称为摄像机投影矩阵,)(t R,称为摄像机外参数。
问题:已知图像点m 坐标),(v u ,如何求解K (称为摄像机标定)?如何求解R 、t (称为运动分析)?如何求解T
w w w Z Y X ),,(=w P (称为三维重构)? 2.2 极几何与基本矩阵 2.2.1 极几何
如果摄像机内参数矩阵为K ,场景点 T
z y x ),,(=x 投影到像平面上的像点齐次坐标T
v u )1,,(=m ,则我们有:(可以理解为第一个摄像机坐标系为世界坐标系)
Kx m =μ (2.14)
当摄像机作刚体运动,旋转矩阵为R ,平移向量为t 时,新的摄像机坐标系为z y x C '''-',它与初始坐标系
C-xyz 之间的关系为t Rx x +='(摄像机移动过程中K 保持不变),则场景点T z y x ),,(=x 在当前像平面上
的象素坐标T
v u )1,,(''='m 为
Kt KRx m +=''μ (2.15)
T v u )1,,(=m 与T v u )1,,(''='m 称为一对匹配点。
现在考虑摄像机在两个视点下拍摄同一场景的情况,如图2-4所示。令C C ',分别为第一与第二个摄像机的光心位置,C '在第一个像平面I 上的投影为 e ,C 在第二个像平面I '上的投影为e ',它们称为外极点。像平面)(I I '上通过点 e (e ')的直线称为外极线。
图2-4 两幅图像的极几何关系
外极约束:
像平面I 上任一点 m ,它在像平面I '上的匹配点 m '必位于外极线 m
l '上;类似地,I '像平面上任一点 m ',它在像平面I 上的匹配点 m 必位于外极线 m l '上。m
l '与 m l '称为对应的外极线。 2.2.2 基本矩阵
在射影空间内,像平面上的直线 l 可用射影坐标l 来表示。令点 m 与m '的外极线m
l '与m l '的射影坐标为m
l '与m 'l ,则m l '与m 之 间满足一个线性变换: Fm l ='m
F 是一个秩 2 的矩阵,称为基本矩阵,它是两幅图像之间极几何的代数刻划。
因 m 的匹配点 m '在外极线 m
l '上,故有 0T ='Fm m (2.16)
将(2.16)式转置
0='m F m T T (2.17)
它表明m '对应的外极线可由m F T
'表示。
基本矩阵有下述基本性质:
(R ,t )
'
(1)F 为基本矩阵当且仅当F 满足式(2.16)且2=)(rank F ; (2)极点 e 满足 Fe = 0,极点 e '满足0='e F T
;
(3)F 在相差一个非零常数因子情况下是唯一的。 基本矩阵的表示
令T
z y x ),,(=x 为任一场景点,I I,'∈'∈m m 是一对匹配点,由式(2.14)、(2.15)在相差一个非零常数因子的情况下,有
Kx m = Kt KRx m +='
所以
Kt m KRK m 1
+='-
即
t m RK m K 11+='--
由向量T z y
x
t t t )(=t 定义的反对称矩阵[]?t 为:
[]????
?????
?---=?0t t t 0t t t 0x
y x z
y z t 即[]0=?t t ,所以
[][]m RK t m K t 11-?-?='
又因[]0R 3
=∈??x t x x T
,,所以m k x x k m '='?'='-1
代入左式得到
[]0=''-?-m K t K m 1T T
因此
[]0='-?-m RK t K m 1T T
由于[]2=-?-)(rank 1T
RK t K
,故基本矩阵可表示为:
[]1T RK t K F -?-= (2.18)
2.2.3 由匹配点求基本矩阵
对于两幅图像之间的匹配点i m 、),...,(n 21i ='i m ,它们必然满足极约束,即0='i T
i Fm m ,该方程
是关于F 的9个末知参数的线性齐次方程,由于F 在相差一个常数因子的意义下是唯一的,所以可以将其中的一个非零参数归一化而变为8个末知参数。这样如果事先能知道8对匹配点,就可以线性地确定F ,这就是所谓的八点算法(8-point algorithm)。
在实践中,由于匹配点存在误差,通常选取多于8对匹配点(n >8),来求解下述线性最小二乘问题:
∑'=i
2i T i F min )(Fm m (2.19)
即解线性超定方程组
199,,0??∈∈=R f R A Af n (2.20)
式(2.20)的解为A A T 最小特征根所对应的单位特征矢量。 2.3 本质矩阵 2.3.1 本质矩阵
如果已知内参数矩阵K ,像平面使用归一化坐标,则称归一化坐标下的基本矩阵为本质矩阵。记本质矩阵为E ,则
0='n Em m T n
(2.21) 因为
m K m ,m
K m 1n 1
n --='=' 所以
0='--m EK K m 1T T
[]1T 1T EK K RK t K F ---?-== (2.22)
[]R t E ?= (2.23)
式(2.22)给出了本质矩阵与基本矩阵之间的关系。从式(2.23)可以看出:本质矩阵与内参数无关,仅由摄像机的运动(R t )所确定。 2.3.2 本质矩阵的性质
(1)2=E rank ; (2)0=t E T
;
(3)T
tt t)I (t EE T
T
-=,也就是T EE 仅仅由平移决定,这是因为
[][][]2
???-==t t RR t EE T
T T
(4)2
2||||2||||t E =,这里||||?表示Frobenius 范数。 2.4 单应矩阵 2.4.1 单应矩阵
令P 是空间任一平面,m 、m '为两幅图像之间的任一对匹配点,如图2-5所示。如果矩阵H 使得
Hm m ='μ (2.24)
其中μ是常数因子,则称H 为平面P 关于两幅图像之间的单应矩阵,简称平面P 的单应矩阵。在一个相差非零常数因子的情况下,单应矩阵是唯一的。 2.4.2 单应矩阵的表示
令平面P 关于第一个摄像机坐标系的方程为:
d =x n T (2.25)
其中n 是平面的单位法向量,d 是平面到坐标原点的距离。
Kx m =μ
(2.26)
在(2.26)中令∞→d ,我们有
(2.27)
并称它为无穷远平面的单应矩阵。
图2-5 P 是空间任一平面,x 为P 上任意点,C 与C '之间的运动为(R t )
2.4.3 单应矩阵与基本矩阵之间的关系
令F 为两幅图像之间的基本矩阵,H 为任一平面的单应矩阵,e '为第二幅图象上的极点,则有
[]H e F ?'= (2.28)
事实上,因为[][][]1-?-??=='K t K
Kt e T
,所以有
2.5 三维重构
在第一章中,我们已经说明本论文研究的重点是“未标定”条件下的三维重构问题,但摄像机投影矩阵已知情况下的三维重构是理解“未标定”条件下三维重构的基础。因此,作为后续章节的基础,本节主要介绍在摄像机投影矩阵已知情况下的三维重构以及内参数已知情况下的运动分析。 2.5.1 空间点的重构
(R ,t )
如图2-6所示,从单幅图像我们不能确定空间点在世界坐标系中的位置。因此,要从图像确定空间点的位置,我们至少需要二幅图像,如图2-7所示。
图2-6空间点与光心连线上任一点均具有相同的图
像,因此从单幅图像我们无法确定空间点在世界坐标系中的位置
图2-7 空间点是两幅图像匹配点与摄像机光心连线的交点,
所以从两幅图像我们可以确定空间点在世界坐标系中的位置
O
令两个摄像机投影矩阵分别为1Q 、2Q ,空间点在世界坐标系中的齐次坐标为T
w z y x ),,,(=x ,两幅图像之间的匹配点为m 、m ',于是我们有
x Q m x Q m 1221='=μμ, (2.29)
这样,可得到下述线性方程组:
00
021=????
? ?????? ??'--μμx m Q m Q 2
1 (2.30) 从方程(2.30),求出x ,再将x 最后一个坐标归一化,可得空间点在世界坐标系中的坐标。 2.5.
2 求摄像机的运动
在三维计算机视觉中,令摄像机作刚体运动,获取(运动前、后)两幅图像,如何根据图像求解摄像
机运动,称为运动分析。显然,如果摄像机投影矩阵已知,这是一个很容易解决的问题,因为由摄像机投影矩阵可以求解出摄像机关于世界坐标系的位置,从而可确定摄像机的运动。
由于内参数是已知的,因此,在本节中,图像坐标均使用归一化坐标。 由本质矩阵求运动:
如果E 为本质矩阵,则一定存在一个旋转矩阵R 和一个向量t ,使得[]R t E ?=,因此有[]2
?-=t EE T
。
因此,E 的奇异值为0||,||t ||||,t ,于是有奇异值分解(SVD ):
V t t U V t t U E ??
???
?????±-??????????-??????????=??????????=10000101000000101000000000000000||||||||||||||||
V U U t t U T ??
???
?????±-??????????-??????????=1000010100000010100000000||||||||
V U U t t U T ??
??
?
?????±-??????????-=1000010100000000||||||||
即
T U t t U t ??
???
?????-=?0000000||||||||][ (2.31)
V U R ??
??
?
?????±-=100001010 (2.32)
从本质矩阵我们可以得到运动的两组解,但仅有一组解是合理的,即重构的空间点位于摄像机前方的解是合理的。另外,由于本质矩阵可以相差一个非零常数因子,所以求解的平移向量与摄像机的真实平移相差一个非零常数因子。 由单应矩阵求运动
令摄像机的运动为)(t R ,平面关于第一个摄像机坐标系的方程为d =x n T
(n 是平面的单位法向量,
d 为坐标原点到平面之间的距离),则平面关于两幅图像的单应矩阵为
(2.33) 如果已知H (可从4对以上匹配点求出),则式(2.33)构成)(t R 的方程。从式(2.33)利用奇异值分解(SVD )可以求解)(t R 。
方程(2.33)一般有4个解。当且仅当H 有两个相同的奇异值时,有两个解;当且仅当有三个相同的奇
异值时,有不定解。 2.5.3 三维重构
运动参数一旦被恢复,我们就得到两个摄像机在欧氏坐标下的投影矩阵,于是根据空间点的重构方法,就可得到物体可见表面的三维重构。
总结上述讨论,具体算法如下: (1)由对应点估计基本矩阵F ;
(2)估计摄像机内参数矩阵K (摄像机运动前、后内参数保持不变); (3)计算本质矩阵FK K E T =;
(4)由本质矩阵恢复运动参数(R t )(平移向量与摄像机的真实平移相差一个非零常数因子); (5)利用两个摄像机投影矩阵)(0I K Q 1=、)(t R K Q 2=重构匹配点对应的空间点,得到物体的三维形状。
由于我们只能在相差一个非零常数因子的情况下恢复摄像机的平移向量,所以重构的物体只能保持其形状(即重构的物体与真实物体相似),而不能恢复真实物体的实际尺寸。
参 考 文 献
[1]R.Hartley, A.Zisserman, Multiple View Geometry in Computer Vision, Cambridge University Press 2000. [2]马颂德,张正友,计算机视觉——计算理论与算法基础,科学出版社,1998.
[3]O.Faugeras, Three Dimensional Computer Vision: A Geometric Viewpoint, Boston, MIT Press, 1993.
[4]Q.T.Luong, O.Faugeras, The Fundamental Matrix: Theory, Algorithms, and Stability Analysis, International Journal of computer Vision, Vol.17, No.2, pp.43-75, 1996.
[5]R. Hartley, Kruppa's Equations Derived from the Fundamental Matrix, IEEE-T PAMI, Vol.19, No.2, pp.133-135, 1997.
[6]M.Pollefeys, L.V.Gool, Euclidean 3D Reconstruction from Image Sequences with Variable Focal Lengths, In Proc. of ECCV'96, pp.31-42, 1996.
[7]P.Torr, D.Murray, The Development and Comparison of Robust Methods for Estima- ting the Fundamental Matrix, International Journal of Computer Vision,Vol.24, No.3,pp. 271-300, 1997
[8]Z.Zhang, Motion and structure from two perspective views: From essential parameters to Euclidean motion via fundamental matrix, Journal of the Optical Society of America, Vol.14, No.11, pp.2938-2950, 1997. [9]R.Hartley, In Defense of the 8-point Algorithm, IEEE-T PAMI, Vol.19,No.6, pp.580 -593, 1997.
[10]R.Hartley, Estimation of relative camera positions for uncalibrated c ameras, LNCS 588, ECCV’92, pp.579-587, Springer-Verlage, 1992.
[11]O.Faugeras, What can be seen in three dimensions with an uncalibrated stereo rig, ECCV’92, pp.563-578, 1992. [12]吴福朝,于洪川,韦穗,视觉基本矩阵的表示,计算机研究与发展, Vol.36, No.6,1999.
[13]R.Hartley, P.Sturm, Triangulation. Computer Vision and Image Understanding Vol. 68, No.2, pp. 146- 57, 1997. [14]S.Avidan, A.Shashua, Threading fundamental matrices. ECCV’98, Vol.I, pp.124- 140 , 1998.
[15]Q.T.Luong, O.Faugeras, On the determination of epipoles using cross ratios. Compu- ter Vision and Image Understanding, Vol.71, No.1, pp.1-18, 1998.
[16]G.Golub, C.F.Van Loan, MatrixComputations. Johns Hopkin University Press,1989.
[17]A.Shashua, Geometry and photometry in 3D visual recognition. PhD thesis, MIT Artificial Intelligence Laboratory, AI-TR-1401, 1992.
[18]黄有度, 狄成恩等著, 矩阵论及其应用。 中国科技大学出版社, 1995. [19]史荣昌编著,矩阵分析。北京理工大学出版社(第二版),1998。 [20]施妙根,顾丽珍编著,科学和工程计算基础。清华大学出版社,1999.
时间与空间 ——物理与艺术的共同主题 ADV15017陈小华 (厦门大学嘉庚学院人文与传播学院15级广告系1班) 摘要:时间与空间是物理与艺术的共同主题,无论是科学还是艺术史上都一直在对时间与空间有着穷追不舍的探索,两者看似相互对立却又息息相关。从西方注重视觉感受的绘画到伽利略牛顿的西方科学,我们可以看见绘画和科学研究上不断的对时间和空间的认识,对光线的发现,对宇宙的探索,而宇宙就是时间与空间,我们对宇宙是无穷的探索对时间和空间也是这样。 关键词:时间空间物理艺术探索绘画 物理与艺术就像是硬币的两个面,艺术表现手段是图象和隐喻,物理表现手段是数字和方程,传统上说,艺术抒发情感;物理追求理性,所以,他们在表面上是对立的。但是, 两者均面对同一个自然,均是人类尝试认知真理的手段。我们去追寻物理和艺术的发展历史,就会发现他们之间在对宇宙图景认知方式上本质存在的相互关联。科学家就是表现宇宙真实存在的艺术家以人性之浪漫情怀拥抱宇宙之道,艺术家——表现情感真实存在的科学家按宇宙之道表达人性之浪漫情怀,宇宙就是时间和空间,所以我们去看西方的科学和艺术史,也可以看见科学家和艺术家们在时间和空间上的认知与研究。从古希腊到文艺复习绘画家从用一般线条和没有阴影单调色彩到受到光影学透视原理等的影响开始了绘画历史的全新状态,利用光影来描绘出各自逼真的场景。我们对时间与空间的认识是无止境的,无论是物理还是艺术上,对时间和空间都有着各种千丝万缕的关系,我们对此也有着做不完的研究与探索,这是一个永恒的研究探索话题。 1.认识与发展 1.1认识 在乔托没有发现透视原理之前,柏拉图,亚里斯多德,拉斐尔等古希腊哲学家就已经在对时间,空间,光这三者进行无尽的探索了。在伊特鲁里亚墓室壁画《哀悼的妇女》中,画中的妇女排成队列,一个接一个,被一种不变的力量主宰着向前行进,既有空间上的线性意义,也有时间上的线性意义。后来线性化的时间概念也在希腊古典艺术中得到体现,即使黑暗的中世纪充满的黑暗,却也抵不住人类对时间与空间的好奇与探索。 1.2发展 乔托发现了透视原理奠定了西方美术的基础,就绘画而论,我们的成就首先应当归功于马萨乔,是他第一次真正使人物脚踏实地。艺术史上有乔托发现透视原理,在物理史上哥白尼在临终前出版了《天体运行论》,向我们描绘了一个全新的宇宙——日心体系。哥白尼的日心体系开拓了人们观察自然的角度和视界,正如乔托的“透视”原则开拓了艺术视野。乔托的眼光超越了平面,哥白尼的心也也飞向了太阳,这已经是人类对时间与空间很大的进步认识了。在这些基础上,后来的物理与艺术都得到许多进步,绘画上阴影和色彩的应用和
时间空间分析之基础篇 人类的知识,是关于人类所在世界的描述。当然,核心的问题离不开世界的本质。是什么、如何发展变化,既是知识的对象,更是检验知识是否真伪的标准。就如一张四方的桌面,在你描述的中不能变成了圆的。人类根据经验到的世界,加以抽象,形成基本命题,在这个基础上,通过逻辑推理出一系列结论,可以得到一系列的科学知识。 在科学史上有两个人是最重要的:一个是亚里士多德,还有一个是欧几里德。他们共同为西方人以及全人类奠定了最初的逻辑思维的基础。在座的人都学过中学的几何,平面几何,别看平面几何好像很容易学,但它是从简单到复杂的一个非常光辉的典范。大家知道欧几里德几何就是五条公理,五条公理都是明明白白的话。比如说,两个点决定一条直线,三个点决定一个平面,通过一个点可以画出无数条直线等等。他就是通过这一些不证自明的公理,一步一步地推出一些一眼看过去很难说出来的结论。人类的知识理论最基础的部分,大多是无法证明和反驳的,它们是一些假设、假定,及由假定而发展成的信仰。以此为基础,通过逻辑推理,是可以到达科学的彼岸。知识是为真,是为假。都可以通过检验其中的逻辑通路去辨别。 逻辑本身是思维规则,而人的思维对应于现象界。时间和空间是构成任何经验认识的先决条件,我们绝不能设想事物不存在于一定的时间和空间。事物的相对稳定性状态是形式逻辑的客观基础。可说的东西,是因为流变中存在相对稳定的状态,对于人类的短暂它已经算是永恒了,因而,就存在一种相对可说的东西,是为规律。事物存在于空间时间中并受时空所约束,那么,对应的,人的思维如果要保证与对应事物一致性,就得接受一些约束。这一约束我们称为逻辑规则。这些规则首先要符合这个世界所在的时空约束。 同一律规定在同一思维过程中,A始终是A。所使用的每一概念或判断都有其确定的内容,而不能任意变换。在所指的时间空间范围内,所指的质没有发生变化,则逻辑有效。由于存在这样的要求,当科学家分析问题及做实验时,总是要追求理想状态。为的是减少干扰因素,保证研究对象不因干扰而发生变化。反过来,在一个单纯环境下获得的知识,只对应于该环境下有效。只是人类相对于世界来说是短暂的,在宇宙长河中,一些短暂的瞬间对于人类来说也是永恒了;对应于宇宙如尘埃的地球也大到是全世界了。所以,一些知识对于人类来说,算是永恒的真理了。当人类眼界越来越深远,才知道并非如此。 几百年前,我们认为地球是平的,我们的地球是宇宙的中心,这都不影响它的真理性,因为我们的活动空间没有超出过地球本身。于是,平面几何可以应付一切。当我们需要研究曲面的空间时,就需要另一套理论体系。而在黎曼几何里,平行线可以相交。显然与平面几何已经发生了矛盾,平面几何的定理不能应用于曲面几何,但平面几何仍然在自己的时空约束下是正确的。纯科学的研究者都很注意知识的边界。 通过以上的分析,我们可以确定时空因素决定了逻辑规则的适用性,更决定的分析的可靠性。那么,就有必要研究时空本身的特点以及时空约束产生的原因。对于时间,牛顿在《自然哲学的数学原理》中以附录的形式作了说明,他这样写到:”绝对的,真实的和数学的时间,由其特性决定,自身均匀地流逝,与一切外在事务无关,又名延续;相对的,表象的和普通的时间是可以感知和外在的(不
应用时间空间相关成像技术与二维、M型超声心动 目的对比研究时间空间相关成像技术(STIC)、二维超声心动图(2DE)及m型超声心动图(ME)在评价胎儿左心功能中的应用效果。方法选取我院2015年6月~2015年12月我院收治的超声诊断胎儿心脏未见异常孕妇36例,分别应用STIC法、二维超声心动图法及M型超声心动图法测定36例胎龄24~30周的正常胎儿心脏左室收缩末期容积(LVESV)、舒张末期容积(LVEDV)、射血分数(LVEF)及每搏输出量(LVSV)等功能指标,并对所得结果进行。结果STIC法与M型超声心动图法所测得LVESV结果比较,差异无统计学意义(P>0.05),但与M型超声心动图所测得LVEDV结果比较,差异有统计学意义(P<0.05);而STIC法与二维超声心动图法所测得LVESV、LVEDV、LVEF与LVSV结果比较,差异无统计学意义(P>0.05);且二维超声心动图法与M型超声心动图测得LVESV、LVEDV结果,差异有统计学意义(P<0.05);M型超声心动图所测LVEF与LVSV值与STIC法和二维超声心动图法比较,差异有統计学意义(P<0.05)。结论由结果可得出STIC与二维超声心动图法所测结果差异小,故可认为相关性较高,而STIC法与M型超声心动图有部分结果存在差异,相关性不高,二维超声心动图法与M型超声心动图结果差异较大,无明显相关性。故STIC与二维超声心动图法测量效果相近,较M型超声心动图测量结果更为准确。 标签:时间空间相关成像技术(STIC);二维超声心动图(2DE);M型超声心动图(ME);胎儿左心功能评价 近年来超声心动图技术发展迅速,己成为各大医院影像科诊断心血管疾病的重要手段之一,胎儿心功能异常属于常见的先天性心脏畸形疾病,介于胎儿年龄幼小,许多介入性的诊断方式难以运用,超声心动图技术己成为胎儿心功能异常的主要诊断技术。通过STICE技术,可以获得胎儿多维切面、心脏参数,并可描绘并记录心脏解剖。STIC技术联合二维超声心动图可以简化胎儿心脏检查的流程,基本满足胎儿心脏筛查的基本要求。ME主要用于心脏及大血管检查,声束根据瓣膜的形态、厚度、反射强弱、活动速度等各层组织结构改变的轨迹,生成一维图像,可诊断先天性心脏病、瓣膜脱垂等症状。二维超声心动图亦称切面超声心动图,能直观显示心脏的空间位置各和结构形态,且其克服了M型超声只能记录一维图象的局限性,理论上更适用于心肌收缩异常和心室功能的评价。 1资料与方法 1.1一般资料 选取我院2015年6月~2015年12月我院收治得超声诊断胎儿心脏未见异常的孕妇36例,获取STIC、二维超声心动图、M型超声心动图的诊断信息,用作结论分析。孕妇年龄25~35岁,平均年龄(28.3±1.7)岁,胎龄24~30周,平均胎龄(25.7±2.1)周,且孕妇均为单胎,无烟酒史,无慢性疾病及先天性疾病。
龙源期刊网 https://www.doczj.com/doc/e017161663.html, 时间与空间里的景物 作者:殷勤 来源:《作文大王·中高年级》2013年第02期 清末大儒王国维说过:“一切景语皆情语。”意思是说,但凡文章里写景的地方,其实都是为了表达作者的感情。那些看似在纯粹描写景物的文字,还是为文章的情感服务的。这一点,我们在以前的专题中已经谈过,这里不再详谈。 另外有一点值得我们注意,就是:所有的景物,都是时间与空间里的景物。怎样来理解这一点呢? 时间,我们都知道了,那就是春夏秋冬、早中晚,等等。这样一说,大家也许就已经明白了,同一景物,一年四季各不相同,一天各时也不一样,它都是在变化中的。同一地方,春生夏长,秋收冬藏,四时不同。朝霞晚岚、阴晴雨雪,景随时移。如果有需要,我们在写景的时候,能够写出这些变化,那文章的层次就丰富了,能表达的情感层面也丰富了。 空间,怎么理解呢?那就是在一定的区域里,有不同的景物。比如一座公园,你可以看到东南西北四面不同的风景;同一座山,你可以看到山上山下不同的风光。在一定的空间里,随着视角的变化,景物也在变化,这些,我们在写景的时候,也应该加以注意。 现在回到我们今天要写的这个题目上来。以“校园的景物”为例,大家一审题就知道,我们要写的是校园的景物,“校园”就是我们要写的空间。在这样一个空间的范围内,你可以写不同时间中这些景物的变化。比如,校园的春夏秋冬,一年四季,或者校园景物在一天里的变化。——这样一提醒,你的思路应该打开了吧? 当然,这个练习要求没有规定得那么死板,我们的思路就可以放得更开一些。你大可以写同一时间里校园景物与别的地方景物的比较,总之,你只要能抓住景物的特点,确定你所要表达的情感,怎么写都不离开这个情感的中心,就不会离题。 也许有的同学会说,我们对自己的校园太熟悉了,都觉得没什么可写的了。其实呢,就一个空间来说,大有大的写法,小有小的写法。学校大,景物多,那当然好写一些;学校小,景物也少,那就需要转换一个视角了。这需要你观察细致,能从小的地方发现引人之处,写出可写之情。——还是那句话,最后离不开情感这一主旨:你或者表达对学校的喜爱之情,或者表达对学校的怀念之情(如果你已经离开了学校的话),等等。 聪明的你,了解了上面这些,是不是觉得很有话可写了呢? 下面我们还是通过一则实例,来看看我们的同龄人是怎样写景的吧。
“时间——空间”不同历史时期空间的形式与特点 要读懂建筑,首先得读懂空间。用时间——空间的观念去探析空间,有利于我们更加深入的理解建筑空间形式和发展历程。 古古希腊建筑是欧洲建筑的先河。公元前2世纪古罗马灭掉古希腊之后,继承了古希腊文化并发展出了属于自己的古罗马建筑。公元395年,古罗马分裂为东、西罗马。东罗马形成了自己的建筑体系——拜占庭建筑;而西罗马早在476年灭亡,西欧进入了长达千年的漫长而黑暗的中世纪,在此期间教堂建筑的发展主要经历了罗曼式建筑和哥特式建筑。公元15世纪,文艺复兴时期人们借助复兴古希腊和古罗马的建筑来批判中世纪的哥特式建筑。17世纪开始出现巴洛克和洛可可这类手法主义。 1.古希腊建筑空间 希腊神庙的基本组成有高基台,在高基台上有立柱用于支撑的过梁,过梁支撑着屋顶,还有一间围合起来、几乎封闭的内殿。内殿:神庙的中央格局结构被称为内殿,在古风时期的神庙中,还有一个隔离的房间,也就是所谓的密室,有时密室会被包含在内殿的后方。门廊和后殿:位在内殿的前方,有一个走廊,即门廊,由内殿突出的侧壁以及在这侧壁之间安置的两根圆柱围合而成。由门廊进入内殿,一处类似门廊位于内殿的后方空间被称为后殿。后殿那儿并没有门与内殿相连接着。它的存在完全出于对艺术美学的考虑:保持围柱式神庙的一致性并确保各个方向的可视性,内殿前方布置格局的格局必须在后方重复再构筑一个相似的格局。密室:此外有一个禁闭的空间,即密室。它被包含在内殿末端,也能作为后殿的备用空间。翼廊:关于圆柱的排列方面,通常为一种单一排圆柱列排列,很少是双排圆柱列一致的排列。这将产生一个围绕门廊的状态,称之为翼廊,其能提供来到圣域参访的信众游客一个防护的屏障并且作为祭祀列队而行的空间。 希腊神庙最简单的格局便是壁角柱式神庙,一个小的矩形结构格局守护着神像。位于内殿的前方,一个由内殿突出的侧壁形成的小走廊或门廊。该门廊通过一扇门扉与内殿相连通。两根圆柱被设置在壁角柱的前沿之间以支撑上部构造。这种类型的神庙如果配有一间后殿,则被称为双重壁角柱式神庙。如果一座神庙走廊的墙角柱间有一排四根或六根圆柱排列在神庙的前端,那么这座神庙则属于一座前柱式神庙。两向拜式的神庙会重复设立相同的圆柱在建筑末端,是一种前后两端有圆柱列而两旁没有设立圆柱的宗教建筑。与之相对的围柱式建筑指一座神庙的四周被翼廊所围绕,每一边由单排圆柱列矗立形成,产生一个环绕神庙内部且通畅的门廊。这是纵向连间格局的一个外围柱廊形式,圆柱位于神庙的四周。这种建筑型态在古希腊时期与罗马时期有一种新的变化格局——伪围柱式,其中纵向连间格局周边的圆柱仅仅是由嵌墙柱或是壁柱直接地附着在内殿外部的墙壁上作为象征性标示。双列柱廊式建筑是指整个神殿周围配有双倍柱廊,有些时候神庙的前端与末端还会设一排圆柱列。如果神庙周边内侧的一排圆柱列被设置为嵌墙柱,则被称为仿双重周柱式神庙。圆形神庙的构成为希腊宗教建筑的一种特别型态。它们由一排柱廊所围绕著,被称为围柱式圆形建筑。 希腊神庙不是祭祀场所,而是诸神不容侵犯的空间,因此所有供奉神明仪式都是在在神庙外面举行的。这使得建筑师不必考虑神庙内部空间的社会功能需求,而把神庙看作一个雕塑品,把技艺都投入到建筑比例的设计,立柱、过梁、山形墙的装饰造型上。这造就希腊神庙最大的特点——忽视内部空间和绝妙的人体尺度感。这既是希腊神庙的伟大之处,也是它的缺陷。古希腊人认为,神庙的布置由均衡来决定,均衡取决于比例,正如体态曼妙的人体有比例正确的肢体。最著名的两种柱式——多立克柱式与爱奥尼亚柱式,以及应用这些柱式的神庙,就很清晰地显现了这种由数决定的建筑与人体之间的对应。柱式的檐部及柱础、柱身、柱头的严格和谐的比例和以人为尺度的造型格式。这些比例与规范,与这些柱式的外在
详述时间分辨成像技术的分类及各自原理 时间分辨成像技术,它以超短脉冲激光作为光源,根据光脉冲在组织内传播时的时间分辨特性,使用门控技术分离出漫反射脉冲中未被散射的所谓早期光,进行成像。在边界上可以高时间分辨地测量与组织体内部光学参数有关的传输光,因此可以提供更多的组织体光学参数分布的信息。正在研究的典型时间门有条纹照相机、克尔门、电子全息等。该项技术是光学层析(断层)造影(OT)技术中最主要的一种。 利用组织中光的传输理论,确定组织体,尤其是人体的光学性质基本参数,即吸收系数、散射系数和散射相位函数或平均散射余弦g以及折射率n等。已知光与组织的相互作用参数,在给定的光照方式和边界条件下,光能流率或其它参量全反射率R全透过率T等分布均可由有关的传输模型唯一地确定。再利用图像重建技术。由于生物散射介质的结构特征信息隐含在漫射光中,找到描述光在介质中迁徙规律,通过测试漫射光的有关参数,在眼光的散射路径逆向追溯,则应能重建散射介质结构图像。如采用锁摸激光器作光源,条纹相机测试散射体周围的漫射光的时间分辨参量,再用逆问题算法进行图像重建。目前,逆问题算法大体有两类:一类为蒙特卡罗法,采用这种方法,图像重建精度高,但是计算复杂;另一类是基于光的传输方程,采用优化算法,根据测试周围时间分辨率漫射光的信号进行图像重建。 一、磷光共轭聚电解质用于时间分辨生物检测与成像 近年来,共轭聚电解质(CPEs)在传感和生物成像领域的应用引起人们的广泛关注。除了信号放大的优势外,CPEs在极性溶剂(如水)中具有良好的溶解性,这使得该类材料非常适于传感与生物成像。然而,目前报道的CPEs大都基于荧光作为检测信号,其检测性能易受到背景荧光信号(如生物体的自发荧光等)的干扰,从而降低了检测的信噪比。相比于荧光材料,磷光过渡金属配合物具有长的发射寿命(微秒级),可通过时间分辨荧光技术有效消除短寿命的背景荧光信号(纳秒级)的干扰,从而可显著提高检测的信噪比和灵敏度。结合磷光信号长寿命的优势,利用时间分辨荧光技术,有效消除了背景荧光信号的干扰,显著提高了检测的信噪比和灵敏度,实现了在复杂体系中对heparin的检测。另外,这类聚合物探针可以特异性标记细胞膜,并通过荧光寿命成像技术成功实现了在细胞内背景荧光信号存在下对细胞膜的成像。 二、时间分辨荧光分析技术(稀土荧光配合物的发光机理及荧光性质) 时间分辨荧光测定技术是利用稀土配合物特殊的荧光性质这一特点,在样品被脉冲光激发后、荧光信号采集前,根据样品中所包含的荧光物质荧光寿命的不同引入一定的延迟时间,待短寿命的背景荧光完全淬灭后,再对长寿命的特异性荧光信号进行测定。采用时间分辨荧光测定技术可以有效消除来自样品、试剂、仪器等的短寿命非特异性荧光的干扰,从而极大地提高荧光检测的灵敏度。已广泛的应用于免疫分析、核酸测定、荧光显微镜成像、细胞识别、单细胞原位测定、生物芯片等生化领域,并发展出了相应的时间分辨荧光免疫测定法、时间分辨荧光DNA杂交测定法、时间分辨荧光显微镜成像测定法、时间分辨荧光细胞活性测定法及时间分辨荧光生物芯片测定法等分支。 三、时间分辨中红外光谱研究蛋白质折叠动力学进展 基于多通道时间分辨光学层析成像系统的差分图像重建近10年来,基于近红外光的光学成像受到了广泛的重视。由于生物组织体对近红外光的吸收变化和