目录
1网络设计要求 (2)
2网络拓扑图 (2)
3网络设备选型 (2)
4IP地址规划 (4)
5规划与配置 (5)
6测试与总结 (8)
1网络设计要求
1)请根据网络结构合理规划IP地址;
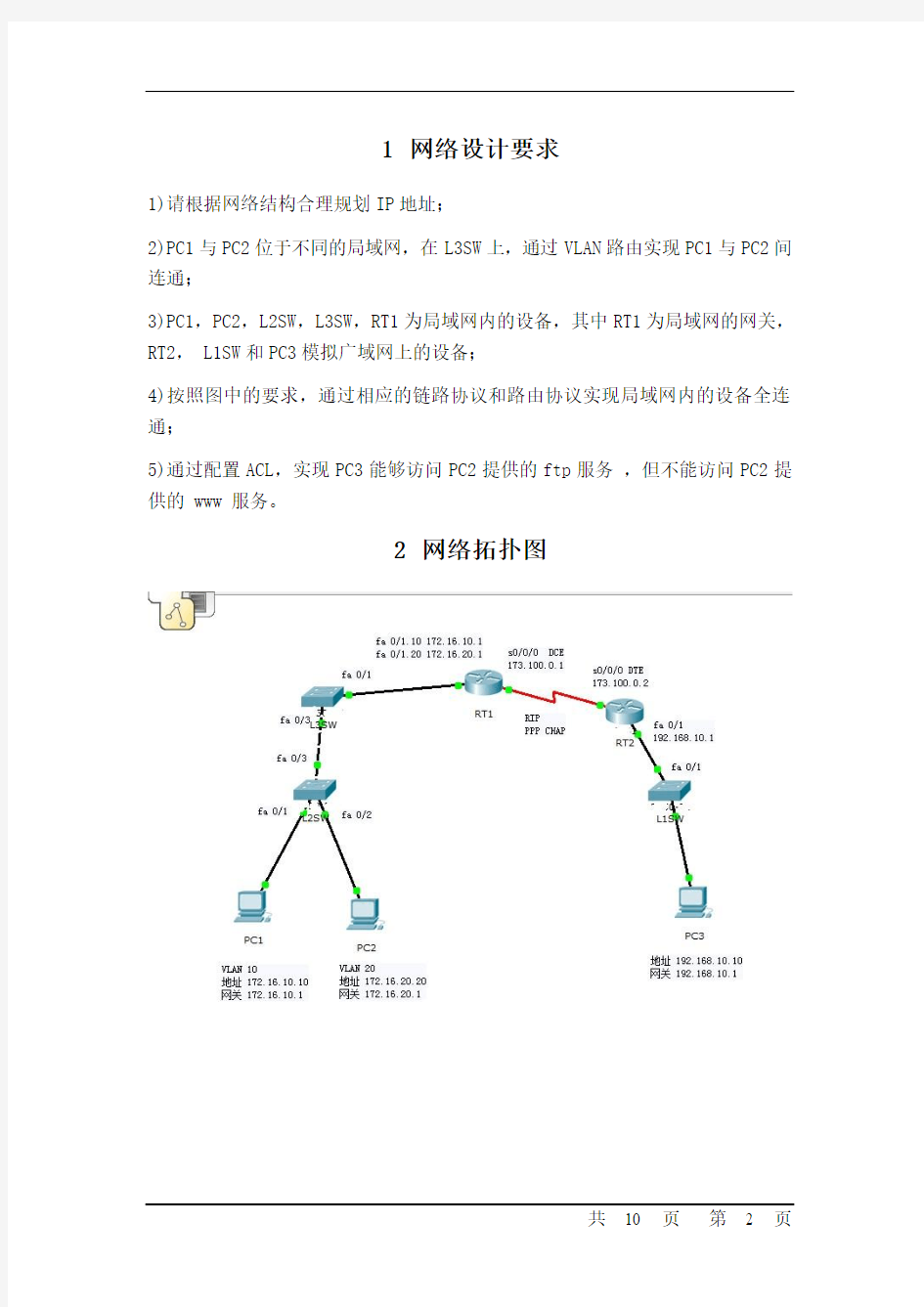
2)PC1与PC2位于不同的局域网,在L3SW上,通过VLAN路由实现PC1与PC2间连通;
3)PC1,PC2,L2SW,L3SW,RT1为局域网内的设备,其中RT1为局域网的网关,RT2, L1SW和PC3模拟广域网上的设备;
4)按照图中的要求,通过相应的链路协议和路由协议实现局域网内的设备全连通;
5)通过配置ACL,实现PC3能够访问PC2提供的ftp服务,但不能访问PC2提供的 www 服务。
2网络拓扑图
3网络设备选型
设备名称设备主要性能及选择理由
1 S3610 在中小型或大型网络中,H3C S3610 系列以太网交换机可
作为骨干交换机,通过路由器连接到总部或其他分支机构
的网络。可提供IPv4/IPv6 路由、组播协议、
802.1x-HABP-MAC 地址认证、AAA-RADIUS-HWTacacs 、ACL、
QoS等服务。
2 2950t交换
机支持10BaseT、100BaseTX、1000BaseT端口上的IEEE 802.3x全双工操作,IEEE 802.1D生成树协议,IEEE 802.1p CoS,IEEE 802.1Q VLAN,IEEE 802.3ab 1000BaseTX规范,IEEE 802.3u 100BaseTx 规范,IEEE 802.3 10BaseTx规,各端口的状态指示LED:连接成功、失败、活动、速度和全双工指示。系统状态LED:系统、RPS、带宽使用指示。
3 华为H3C
S3610 三层
交换机H3C S3610系列多协议交换机是H3C公司基于全新软硬件平台开发的支持IPv4/IPv6双栈的盒式路由交换机系列。系统支持IPv4/IPv6 双栈及硬件转发、丰富的IPv4/IPv6路由协议和隧道技术,是理想的大型园区网、网络实验室的汇聚、接入交换机以及中小企业、分支机构的核心交换机。
4 思科
2620路由器用高性能处理器,结合业界领先的ReOS网络操作系统,将智能NAT、内置防火墙、流量控制、IP/MAC绑定等常见路由器功能集中到一体。此外,还具备性价比高、安全性强、配置简单实用、策略库自动更新等突出特点。
4IP地址规划
区域IP地址子网掩码网关
1 PC1 172.16.10.10 255.255.255.0 172.16.10.1
2 PC2 172.16.20.20 255.255.255.0 172.16.20.1
3 PC3 192.168.10.10 255.255.255.0 192.168.10.1
4 RT1
172.16.10.1 255.255.255.0
fa0/1.10
172.16.20.1 255.255.255.0
RT1
fa0/1.20
RT1
173.100.0.1 255.255.255.0
S0/0/0
5 RT2
192.168.10.1 255.255.255.0
Fa 0/1
RT2
172.100.0.2 255.255.255.0
S0/0/0
5规划与配置
1)交换机L2SW、L3SW配置:创建vlan10 和vlan 20,划分接口
L2SW>en
L2SW#conf t
L2SW(config)#vlan 10
L2SW(config)#vlan 20
L2SW(config)#int fa0/1
L2SW(config-if)#switchport mode access
L2SW(config-if)#switchport access vlan 10
L2SW(config-if)#int fa0/2
L2SW(config-if)#switchport mode access
L2SW(config-if)#switchport access vlan 20
L2SW(config-if)#int fa0/3
L2SW(config-if)#switchport mode trunk
L3SW>en
L3SW#conf t
L3SW(config)#vlan 10
L3SW(config)#vlan 20
L3SW(config-if)#int fa0/3
L3SW(config-if)#switchport mode trunk
2)利用单臂路由在RT1的fa 0/1 子接口下配置以实现vlan间通信RT1>en
RT1#conf t
RT1(config)#interface FastEthernet0/0
RT1(config-if)#no shutdown
RT1(config-if)#no ip address
RT1(config-if)#exit
RT1(config)#int fa0/1.10
RT1(config-subif)#encapsulation dot1Q 10
RT1(config-subif)#ip add 172.16.10.1 255.255.255.0
RT1(config-subif)#no shut
RT1(config-subif)#exit
RT1(config)#int fa0/1.20
RT1(config-subif)#encapsulation dot1Q 20
RT1(config-subif)#ip add 172.16.20.1 255.255.255.0 RT1(config-subif)#no shutdown
RT1(config-subif)#exit
RT1(config)#
3)RT1和RT2配RIP
RT1(config)#int s0/0/0
RT1(config-if)#ip add 173.100.0.1 255.255.255.0 RT1(config-if)#no shut
RT1(config-if)#clock rate 64000
RT1(config-if)#exit
RT2(config)#int s0/0/0
RT2(config-if)#ip add 173.100.0.2 255.255.255.0 RT2(config-if)#no shut
RT2(config-if)#exit
RT1(config)#router rip
RT1(config-router)#net 172.16.0.0
RT1(config-router)#net 173.100.0.0
RT2(config)#router rip
RT2(config-router)#net 173.100.0.0
RT2(config-router)#net 192.168.10.0
4)PPP的CHAP验证
RT1(config)#int s0/0/0
RT1(config-if)#encapsulation ppp
RT1(config-if)#exit
RT1(config)#username RT2 password 0 xiaohai
RT2(config)#int s0/0/0
RT2(config-if)#encapsulation ppp
RT2(config-if)#exit
RT2(config)#username RT1 password 0 xiaohai
RT2(config)#int s0/0/0
RT2(config-if)#ppp authentication chap
5)ACL配置
RT2(config)#access-list 110 deny tcp 192.168.10.10 0.0.0.0 172.16.20.20 0.0.0.0 eq www
RT2(config)#access-list 110 permit tcp 192.168.10.10 0.0.0.0 172.16.20.20 0.0.0.0 eq ftp
RT2(config)#int f0/1
RT2(config-if)#ip access-group 110 in
RT2(config-if)#exit
6测试与总结1、测试
1.1 PC1 与PC2 的连通性验证vlan间通信
1.2 pc1 与 pc3 的连通性验证rip 以及ppp协议
1.3 pc3 访问 pc2 的 www
未成功1.4 pc3 访问pc2 的 ftp
2、总结
本课程设计是通过对以下配置来实现各功能的
(1)交换机L2SW、L3SW配置:创建vlan10 和vlan 20,划分接口(2)利用单臂路由在RT1的fa 0/1 子接口下配置以实现vlan间通信(3)RT1和RT2配RIP
(4)PPP的CHAP验证
(5)ACL配置
软件综合课程设计任务书
————————————————————————————————作者: ————————————————————————————————日期: ?
软件综合课程设计任务书 一、课程设计的目的、要求 目的:软件综合课程设计是一个综合性的设计型实验教学环节,旨在使学生通过软件开发的实践训练,进一步掌握设计开发软件的方法与技术,学会数据的组织方法,提高软件开发的实际能力,培养创造性的工程设计能力和分析、解决问题的能力。 实现以下目标: 1.深化已学的理论知识,完成理论到实践的转化 通过软件开发的实践,进一步加深对软件工程方法和技术的了解,将所学的理论知识运用于开发实践中,并在实践中逐步掌握软件工具的使用。 2. 提高分析和解决实际问题的能力 课程设计不仅是一次软件工程实践的模拟训练,同时通过软件开发的实践,积累经验,提高分析问题和解决问题的能力; 3. 培养“开拓创新”能力 大力提倡和鼓励在开发过程中使用新方法、新技术,激励学生实践的积极性和创造性,开拓思路,设计新算法、新创意,培养创造性的工程设计能力; 要求:学生组成开发小组(2~4人),以小组为单位选择并完成一个规模适度的软件项目,在教师的指导下以软件设计为中心,独立完成从需求分析到软件测试的开发过程。 二、设计步骤安排 1.确定课题 由教师命题并给出各课题的具体需求,学生根据课题涉及的知识领域及自己对该领域的熟悉程度和对该课题的兴趣,选择课题,经教师调整审定后确定; 2. 需求分析 建立系统的分析模型,这是系统开发的重要阶段。主要工作是: 分析确定系统应具备的功能、性能,并从经济上、技术上进行可行性分析,建立“需求分析模型”确定开发计划。 3. 软件设计 具体工作是:对系统的分析模型进行修改、细化,进行系统的结构设计,用户界面设计,数据管理部件设计(若系统涉及到数据库,要对数据库结构进行设计) 4. 编码与测试 根据项目的应用领域及语言的特点,选择编程语言进行编码,要求给出程序的详细注释(包括模块名、模块功能、中间过程的功能及变量说明); 由开发小组进行除验收测试以外的测试工作(包括单元测试、组装测试与系统(确认)测试)。所有测试过程都要求采用综合测试策略,先进行静态分析,再进行动态测试。要求制定测试计划、记录测试过程与结果、保留测试用例、写出测试报告。 5. 验收测试 由教师组织验收测试的实施,内容包括:系统能否正确运行,实际系统与设计方案是否一致,是否实现了需求所确定的功能与性能,系统设计有无特色,算法有无创新,系统结构是否合理、新颖,系统界面是否友好、美观,操作是否简单,使用是否方便。6.总结和整理课程设计报告
“工业机器人”设计大作业 作品题目:货物装卸机器人 专业:机械设计制造及其自动化 姓名:班级:学号: 姓名:班级:学号: 姓名:班级:学号: 指导教师:陈明
1 前言 货物装卸作业是指用一种设备握持工件,是指从一个加工位置移到另一个加工位置。货物装卸机器人可安装不同的末端执行器以完成各种不同形状和状态的工件货物装卸工作,大大减轻了人类繁重的体力劳动。目前世界上使用的货物装卸机器人愈10 万台,被广泛应用于机床上下料、冲压机自动化生产线、自动装配流水线、码垛货物装卸、集装箱等的自动货物装卸。部分发达国家已制定出人工货物装卸的最大限度,超过限度的必须由货物装卸机器人来完成。装卸货物装卸是物流的功能要素之一,在物流系统中发生的频率很高 2 设计方案论证 本课题通过对货物装卸机器人工作对象及工作场所的分析研究,深入了解其工作是 如何进行,各部分零部件应该如何运行以及如何紧密配合,先确定其总体结构再对主要 零部件进行设计计算确定其尺寸大小以及确定电机型号。 2.1 基本思想 (1)设计要考虑要求和工作环境的限制。 (2)考虑到货物装卸货物时所需要精确度不是很高,为了简化结构,境地成本,采用 角铁焊接结构。 (3)为了满足设计要求,须设计三个独立的电机驱动系统,各部分之间通过计算 机控制、协调工作。 (4)本次设计只是该题目的机械部分,而对应控制部件的考虑较少。 3 仓库货物装卸机器人的设计计算 3.1 货物装载伸缩装置的设计 3.1.1 确定传动方案 我们所学的传动方式有以下几种:带传动、链传动、齿轮传动、蜗轮蜗杆传动和钢 丝绳传动等,一般地说,啮合传动传递功率的能力高于摩擦传动;蜗轮传动工作的发热 情况较为严重,因而传动的功率不宜过大;摩擦轮传动由于必须有足够的压紧力,故而 在传递同一圆周力时,其压轴力比齿轮传动的大几倍,因而不宜用于大功率传动。带传
辽宁工业大学 工艺课程设计( 论文) 题目: Al-12.5 Si-3 Cu-2-2Ni-0.5Mg铸造合金热处理工艺设计 院(系): 光伏学院 专业班级: 材料工程技术102 学号: 学生姓名: 杨向天 指导教师: 李青春 教师职称: 副教授 起止时间: -7-5~ -7-16
前言 合金工具钢的淬硬性、淬透性、耐磨性和韧性均比碳素工具钢高, 按用途大致可分为刃具、模具和检验尺寸使用的量具用钢三类。合金工具钢广泛用作刃具、冷、热变形模具和量具, 也可用于制作柴油机燃料泵的活塞、阀门、阀座以及燃料阀喷嘴等。 此设计是经过在课堂学习热处理理论知识后的探索和尝试, 其内容讨论如何设计圆板牙钢的热处理工艺, 重点是制定合理的热处理规程, 并按此完成Al-12.5Si-3Cu圆板牙钢的热处理工艺设计。
目录( 小二号黑体, 段前段后1行, 1.25倍行距, 居中排列) 1 低合金刃具钢热处理工艺概述........................................ 错误!未定义书签。 2 圆板牙钢的热处理工艺设计............................................ 错误!未定义书签。 2.1 圆板牙钢的服役条件、失效形式......................... 错误!未定义书签。 2.2 圆板牙技术要求及示意图 ...................................... 错误!未定义书签。 2.3 圆板牙钢的材料选择 .............................................. 错误!未定义书签。 2.4 圆板牙9SiCr钢的C曲线...................................... 错误!未定义书签。 2.5 圆板牙9SiCr钢加工工艺流程图........................... 错误!未定义书签。 2.6 9SiCr圆板牙(M12)钢退火-淬火-回火热处理工艺错误!未定义书签。 2.7 9SiCr圆板牙钢退火、淬火、回火热处理工艺理论错误!未定义书 签。 2.8 选择设备、仪表和工夹具..................................... 错误!未定义书签。 2.9 圆板牙热处理质量检验项目、内容及要求 ........ 错误!未定义书签。 2.10 圆板牙热处理常见缺陷的预防及补救方法........ 错误!未定义书签。 3 参考文献 ............................................................................ 错误!未定义书签。
Y082231本科(自考)综合课程设计 任务书指导书 西南交通大学 远程与继续教育学院 2017年10月
目录 一、综合课程设计的意义、目标和程序 二、综合课程设计内容及要求 三、综合课程设计成果及格式要求 四、设计方法和要求 五、综合课程设计答辩要求及成绩评定附件1:综合课程设计成果格式
一、综合课程设计的意义、目标和程序 (一)综合课程设计的意义 综合课程设计是工程造价专业人才培养计划的重要组成部分,是实现培养目标的重要教学环节,是人才培养质量的重要体现。根据工程造价专业(独立本科段)考试计划的要求,通过综合 课程设计,可以培养考生用所学基础课及专业课知识和相关技能,解决具体的工程造价实际问题 的综合能力。本次综合课程设计要求考生在指导教师的指导下,独立地完成单项工程的造价的编制,解决与之相关的问题,熟悉定额、手册、标准图以及工程实践中常用的方法,具有实践性、综合性强的显著特点。因而对培养考生的综合素质、增强工程意识和创新能力具有其他教学环节 无法代替的重要作用。 综合课程设计是考生在课程学习结束后的实践性教学环节;是学习、深化、拓宽、综合所学 知识的重要过程;是考生学习、研究与实践成果的全面总结;是考生综合素质与工程实践能力培 养效果的全面检验;是考生毕业及学位资格认定的重要依据;也是衡量高等教育质量和办学效益 的重要评价内容。 (二)综合课程设计的目标 综合课程设计基本教学目标是培养考生综合运用所学知识和技能,分析与解决工程实际问题,在实践中实现知识与能力的深化与升华,初步形成经济、环境、市场、管理等大工程意识,培养考生严肃认真的科学态度和严谨求实的工作作风。使考生通过综合课程设计在具备工程师素质方面更快地得到提高。根据高等教育自学考试工程造价(独立本科段)专业的培养目标,对综合课程设计有以下几方面的要求: 1.主要任务 本次任务在教师指导下,独立完成给定的设计任务,考生在完成任务后应编写出符合要求的设计说明书、提交综合课程设计计算书。 2.专业知识 考生应在综合课程设计工作中,综合运用各种学科的理论知识与技能,分析和解决工程实际问题。通过学习、研究和实践,使理论深化、知识拓宽、专业技能提高。 3.工作能力 考生应学会依据综合课程设计课题任务进行资料搜集、调查研究、方案论证、掌握有关工程设计程序、方法和技术规范。提高理论分析、言语表达、撰写技术文件以及独立解决专题问题等能力。
工业机器人课程设计基于Matlab的工业机器人运动学和雅克比运动分析 班级: 学号 姓名:
目录 摘要 ..................................................................................................................................................... - 2 - PUMA560机器人简介 ...................................................................................................................... - 3 - 一、PUMA560机器人的正解 .......................................................................................................... - 4 - 1.1、确定D-H 坐标系 .................................................................................................................... - 4 - 1.2、确定各连杆D-H 参数和关节变量 ........................................................................................ - 4 - 1.3、求出两杆间的位姿矩阵 ......................................................................................................... - 4 - 1.4、求末杆的位姿矩阵 ................................................................................................................. - 5 - 1.5、M A TLAB 编程求解 .................................................................................................................. - 6 - 1.6、验证 ......................................................................................................................................... - 6 - 二、PUMA560机器人的逆解 .......................................................................................................... - 7 - 2.1、求1θ ........................................................................................................................................ - 7 - 2.2、求3θ ........................................................................................................................................ - 7 - 2.3、求2θ ........................................................................................................................................ - 8 - 2.4、求4θ ........................................................................................................................................ - 9 - 2.5、求5θ ........................................................................................................................................ - 9 - 2.6、求 6 θ ...................................................................................................................................... - 10 - 2.7、解的多重性 ........................................................................................................................... - 10 - 2.8、M A TLAB 编程求解 ................................................................................................................ - 10 - 2.9、对于机器人解的分析 ........................................................................................................... - 10 - 三、机器人的雅克比矩阵 ............................................................................................................... - 11 - 3.1、定义 ....................................................................................................................................... - 11 - 3.2、雅可比矩阵的求法 ............................................................................................................... - 11 - 3.3、微分变换法求机器人的雅可比矩阵 ................................................................................... - 12 - 3.4、矢量积法求机器人的雅克比矩阵 ....................................................................................... - 13 - 3.5、M A TLAB 编程求解 ................................................................................................................ - 14 - 附录 ................................................................................................................................................... - 15 - 1、M ATLAB 程序 ........................................................................................................................... - 15 - 2、三维图 ...................................................................................................................................... - 24 -
网络环境支持的物理网络资源应用与共享网络课程设计依据能力课程标准中“四、主题与课程”中T17主题,确定开发“技术支持的学习方式变革”综合课程“网络环境支持的初中数学探究式教学”。通过本课程的学习,提升初中数学教师在网络环境支持下运用数字教育资源与学科教学工具有效开展数学探究式教学的能力。 一、适用对象与条件 二、学习目标 三、内容规划
四、课程类型选择与设计 1.课程类型: 2.学习活动、资源与评价设计
Unit 1 Sincere Friendship Passage A The Secrets of Male Friendships Background Knowledge 1.Clinton Bill Clinton was born on August 19, 1946 and became the 42nd President of the United States in 1993 and left the White House in 2001. He was the third-youngest president when he won the presidency at 46. Clinton has been involved in public speaking and humanitarian work. He created the William J. Clinton Foundation to promote and address international causes such as treatment and prevention of HIV/AIDS and global warming. In 2004, he released his autobiography My Life, and was involved in his wife Hillary's 2008 presidential campaign and subsequently in that of President Barack Obama. In 2009, he was named United Nations Special Envoy to Haiti. In the aftermath of the 2010 Haiti earthquake, Clinton teamed with George W. Bush to form the Clinton Bush Haiti Fund. 2.Gore Albert Arnold Gore was the 45th Vice President of the United States from 1993 to 2001 under President Bill Clinton. He is currently an author, businessperson, and environmental activist. 3.Bush George W. Bush is the 43rd President of the United States. He was sworn into office on January 20, 2001, re-elected on November 2, 2004, and sworn in for a second term on January 20, 2005. Before his Presidency, he served for 6 years as Governor of the State of Texas. 4.Tom Cruise He is an American film actor and producer. He has been nominated for three Academy Awards and won three Golden Globe Awards. His first leading role was the 1983 film Risky Business, which has been described as "A Generation X classic, and a career-maker" for the actor. After playing the role of a heroic naval pilot in the popular and financially successful 1986 film
1 概述 1.1 工程概况 依据城市总体规划,华东某市在城西地区兴建一座城市污水处理厂,以完善该地区的市政工程配套,控制日益加剧的河道水污染,改善环境质量。该城市现状叙述如下: 1、2号居住区人口3万,污水由化粪池排入河道;3、4号居住区人口5万,正在建设1年内完成;5号居住区人口4.5万,待建,2年后动工,建设周期2年。还有部分主要公共建筑,宾馆5座,2000个标准客房;医院2座,1500张床。以上排水系统均采用分流制系统。同时新区内还有部分排污工厂:电子厂每天排水1500m3,BOD5污染负荷为3000人口当量;食品厂每天排出污水量500 m3,污染负荷为1500人口当量。 旧城区原仅有雨水排水系统,污水排水系统的改造和建设工程计划在10年内完成,届时整个排水区域服务人口将达到18万。 依据上述情况,整个工程划分为近期和远期两个建设阶段,现在实施的工程为近期建设。近期建设周期大概在3年左右,设计服务范围应该包括新区5个已建和待建的居住区、新区内部分主要公共建筑以及2个工厂。依据环保部门以及排放水体的状况,排放水要求达到《城镇污水处理厂污染物排放标准》(GB 18918-2002)一级B标准。 1.2 设计依据 《城镇污水处理厂污染物排放标准》(GB 18918-2002) 《室外排水设计规范》(GB50101) 《城市污水处理工程项目标准》 《给水排水设计手册》,第5册城镇排水 《给水排水设计手册》,第10册技术经济 城市污水处理以及污染物防治技术政策(2002) 污水排入城市下水道水质标准CJ3082-1999 地表水环境质量标准GB3838-2002 城市排水工程规划规范GB50381-2000 1.3设计任务和范围 (1)收集相关资料,确定废水水量水质及其变化特征和处理要求; (2)对废水处理工艺方案进行分析比较,提出适宜的处理工艺方案和工艺流程; (3)确定为满足废水排放要求而所需达到的处理程度; (4)结合水质水量特征,通过经济技术分析比较,确定各处理构筑物的型式; (5)进行全面的处理工艺设计计算,确定各构筑物尺寸和设备选型; (6)进行废水处理站平面布置及主要管道的布置和高程计算; (7)进行工程概预算,说明废水处理站的启动运行和运行管理技术要求 2 原水水量与水质和处理要求: 2.1 原水水量与水质 一期工程: Q=36000m3/d
河南机电高等专科学校《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 扣号: 姓名:流星 2014 年 10 月 1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15) 一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一
步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,利用限位开关来保护电机和控制机械手位置的准停。 这个课题可以充分的体现机电一体化的由程序自动控制机械结构的运动,对自己以前的所学的课程也是一种巩固。另一方面这个机械手可以实现一定的搬运功能具有很强的实用性能。 2、发展现状和趋势
机械制造学课程设计说明书 题目名称 专业班级 学生姓名 学号 指导教师 机械与电子工程系 二○一四年月日
目录 一、任务书--------------- -------3 二、指导教师评阅表----------------------4 三、序言-------------------------------------------------------------------------------------------3 四、零件的分析-----------------------------------------------------------------------------------3 五、工艺规程的设计------------------------------------------------------------------------------4 (1). 确定毛坯的制造形式---------------------------------------------------------------4 (2). 基面的选择---------------------------------------------------------------------------4 (3). 制订工艺路线------------------------------------------------------------------------4 (4). 机械加工余量、工序尺寸及毛坯尺寸的确------------------------------------5 (5). 确定切削用量及基本工时---------------------------------------------------------6 六、设计心得与小结-----------------------------------------------------------------------------11 七参考文献-------------------------------------------------------------------------------------1 1
机电一体化系统课程设计 X-Y数控工作台设计说明书 学校名称:湖北文理学院 班级学号:2013279129 学生姓名:张亮 班级:机电1321 2015年11月
一、总体方案设计 1.1 设计任务 设计一个数控X-Y工作台及其控制系统。该工作台可用于铣床上坐标孔的加工和腊摸、塑料、铝合金零件的二维曲线加工,重复定位精度为±0.01mm,定位精度为0.025mm。 设计参数如下:负载重量G=150N;台面尺寸C×B×H=145mm ×160mm×12mm;底座外形尺寸C1×B1×H1=210mm×220mm×140mm;最大长度L=388mm;工作台加工范围X=55mm,Y=50mm;工作台最大快移速度为1m/min。 1.2 总体方案确定 (1)系统的运动方式及伺服系统 由于工件在移动的过程中没有进行切削,故应用点位控制系统。定位方式采用增量坐标控制。为了简化结构,降低成本,采用步进电机开环伺服系统驱动X-Y工作台。 (2)计算机系统 本设计采用了及MCS-51系列兼容的AT89S51单片机控制系统。它的主要特点是集成度高,可靠性好,功能强,速度快,有较高的性价比。 控制系统由微机部分、键盘、LED、I/O接口、光电偶合电路、步进电机、电磁铁功率放大器电路等组成。系统的加工程序和控制命令通过键盘操作实现。LED显示数控工作台的状态。
(3)X-Y工作台的传动方式 为保证一定的传动精度和平稳性,又要求结构紧凑,所以选用丝杠螺母传动副。为提高传动刚度和消除间隙,采用预加负荷的结构。 由于工作台的运动载荷不大,因此采用有预加载荷的双V形滚珠导轨。采用滚珠导轨可减少两个相对运动面的动、静摩擦系数之差,从而提高运动平稳性,减小振动。 考虑电机步距角和丝杆导程只能按标准选取,为达到分辨率的要求,需采用齿轮降速传动。 图1-1 系统总体框图
《机器人应用技术》课程作品 设计说明书 作品名称:多功能机械手 专业:机电一体化技术 班级:机电124班 2014 年10 月1 日
目录 一课题概述 (2) 1、选题背景 (2) 2、发展现状和趋势 (3) 3、研究调研 (4) 二机械手组成及工作过程 (6) 1、整体结构分析 (6) 2、所需器材 (6) 3、底座部分 (8) 4、躯干部分 (9) 5、上臂部分 (10) 6、手爪部分 (11) 7、机械手系统的总调试 (12) 三软件部分 (13) 1、机械手软件编制流程图 (13) 2、机械手运行控制程序图 (14) 四设计体会 (15)
一课题概述 1、选题背景 随着我国经济的高速发展,各种电子产品和各种创新机械结构的出现,工业机器人的作用在装配制造业产业中的地位更加重要了。另一方面随着人们生活水平的提高传统制造产业劳动力生产成本进一步提高,这也使企业意识到用高速准确的机械自动化生产代替传统人工操作的重要性。其中机械手是其发展过程中的重要产物之一,它不仅提高了劳动生产的效率,还能代替人类完成高强度、危险、重复枯燥的工作,减轻人类劳动强度,可以说是一举两得。在机械行业中,机械手越来越广泛的得到应用,它可用于零部件的组装,加工工件的搬运、装卸,特别是在自动化数控机床、组合机床上使用更为普遍。目前,机械手已发展成为柔性制造系统FMS和柔性制造单元FMC中一个重要组成部分。把机床设备和机械手共同构成一个柔性加工系统或柔性制造单元,可以节省庞大的工件输送装置,结构紧凑,而且适应性很强。但目前我国的工业机械手技术及其工程应用的水平和国外比还有一定的距离,应用规模和产业化水平低,机械手的研究和开发直接影响到我国机械行业自动化生产水平的提高,从经济上、技术上考虑都是十分必要的。因此,进行机械手的研究设计具有重要意义。 在这样一个大的背景下结合自己的专业机电一体化,我们选择多功能机械手来作为我们的设计题目。结合专业特点使用德国慧鱼机器人教学模型作为我们实现这一课题的元件。利用慧鱼模型的各种机械结构组装出机械手的机械部分,用pc编程实现对机械手的自动控制,
燕山大学 机械设计课程设计说明书题目:带式输送机传动装置 学院(系):机械工程学院 年级专业: 09级机械设计及理论 学号: 0901******** 学生姓名:乔旋 指导教师:许立忠 教师职称:教授
目录 一、设计任务书.................................................................. 二、传动方案分析................................... .......................... 三、电动机的选择和参数计算........................................ 四、传动零件的设计计算................................................. 五、轴的设计...................................................................... 六、键的选择校核............................................................ 七、轴承的校核................................................................... 八、联轴器的选择及校核................................................ 九、密封与润滑的选择.................................................... 十、减速器附件及说明................................................... 十一、装配三维图........................................................ 十二、设计小结............................................................. 参考资料...................................................................
珠海学院课程教学大纲 课程名称:计算机软件综合课程设计 适用专业: 2015级软件工程专业 课程类别:专业基础课 制订时间:2017年6月 计算机科学与技术系制
目录 1 《计算机软件综合课程设计》教学大纲 2 《计算机软件综合课程设计》(模板) 3 《计算机软件综合课程设计》成绩评定表
《计算机软件综合课程设计》教学大纲 一、课程设计基本信息 课程代码: 课程名称:计算机综合应用课程设计 课程学时:32学时 课程学分:2.0 适用对象:计算机科学与技术专业、软件工程专业 先修课程:高级语言程序设计、数据结构、操作系统、数据库原理与应用 二、课程设计目的和任务 本课程设计是检验计算机专业的学生在大学主干课程完成之后,为了加深和巩固学生对前两年所学理论和应用知识的理解,同时提高学生综合运用的能力和分析问题、解决的问题的能力而开设的一门实践课程。 通过本环节学生能够充分把前两年学到的知识综合应用到实际的编程实践中,可以进一步巩固所学到的理论。通过实现一个中等规模的应用软件,提高利用计算机系统解决实际问题的能力,为顺利毕业、进入社会打好基础;通过对程序的规范编写,可以培养学生良好的编程风格,包括程序结构形式,行文格式和程序正文格式等;并培养学生的上机调试能力。 三、课程设计方式 1、课程设计题目的选定 采用指导教师提供参考题目与学生自主命题相结合的办法选定课程设计题目。要求不多于4个人一个小组,不得重复,所涉及数据库的基本表至少在5张表以上,在尽量满足数据库设计原则的前提下,允许适当冗余以提高检索的速度。其中学生自主命题需要指导教师严格的审核,看是否满足课程要求,检查是否为重复课题。 2、课程设计任务的完成
沈阳工程学院 课程设计 设计题目:三自由度微型直角坐标工业机器人模型设计 系别自控系班级测本081 学生姓名步勇捷学号 2008310110 指导教师祝尚臻职称讲师 起止日期:2012年 1 月 2 日起——至 2012 年 1 月13 日止 - I -
沈阳工程学院 课程设计任务书 课程设计题目:三自由度直角坐标工业机器人设计 系别自动控制工程系班级 学生姓名学号 指导教师职称讲师 课程设计进行地点: F430 任务下达时间: 2011年 12月31日 起止日期:2012 年 1 月2日起——至 2012 年 1 月13日止教研室主任年月日批准 - II -
三自由度直角坐标工业机器人设计 1 设计主要内容及要求 1.1 设计目的: 1了解工业机器人技术的基本知识以及单片机、机械设计、传感器等相关技术。 2初步掌握工业机器人的运动学原理、传动机构、驱动系统及控制系统并应用于工业机器人的设计中。3通过学习,掌握工业机器人的驱动机构、控制技术,并使机器人能独立执行一定的任务。 1.2 基本要求 1要求设计一个微型的三自由度的直角坐标工业机器人; 2要求设计机器人的机械机构(示意图),传动机构、控制系统、及必需的内外部传感器的种类和数量布局。 3要有控制系统硬件设计电路。 1.3 发挥部分 自由发挥 2 设计过程及论文的基本要求: 2.1 设计过程的基本要求 (1)基本部分必须完成,发挥部分可任选; (2)符合设计要求的报告一份,其中包括总体设计框图、电路原理图各一份; (3)设计过程的资料保留并随设计报告一起上交;报告的电子档需全班统一存盘上交。 2.2 课程设计论文的基本要求 (1)参照毕业设计论文规范打印,包括附录中的图纸。项目齐全、不许涂改,不少于3000字。图纸为A4,所有插图不允许复印。 (2)装订顺序:封面、任务书、成绩评审意见表、中文摘要、关键词、目录、正文(设计题目、设计任务、设计思路、设计框图、各部分电路及相应的详细的功能分析和重要的参数计算、工作过程分析、元器件清单、主要器件介绍)、小结、参考文献、附录(总体设计框图与电路原理图)。 3 时间进度安排 顺序阶段日期计划完成内容备注 1 2012.1. 2 讲解主要设计内容,布置任务打分 2 2012.1. 3 检查框图及初步原理图完成情况,讲解及纠正错误打分 3 2012.1. 4 检查机械结构设计并指出错误及纠正;打分 4 2012.1. 5 继续机械机构和传动机构设计打分 5 2012.1. 6 进行控制系统设计打分 6 2012.1.9 检查控制系统原理图设计草图打分 7 2012.1.10 完善并确定控制系统打分 8 2012.1.11 指导学生进行驱动机构的选择打分 9 2012.1.12 进行传感器的选择和软件流程设计打分 10 2012.1.13 检查任务完成情况并答辩打分 - III -
《综合课程设计》教学大纲 课程名称:综合课程设计 英文名称:Integrated Course Project for Communication Systems 总学时:3周,理论学时:实验学时:学分:3 先修课程要求: 电路分析、模拟电子技术、数字电子技术、高频电子线路、通信原理、FPGA原理与应用、Matlab与通信仿真技术、微机原理与接口技术、单片机技术及应用、计算机网络等 适用专业:通信工程 教学参考书: 樊昌信等编,《通信原理(第六版)》,国防工业出版社,2006年 马淑华等编,《单片机原理及应用》,北京航空航天大学出版社,第1版 褚振勇等编,《FPGA原理与应用》,西安电子科技大学出版社,第2版 谢希仁等编,《计算机网络》,电子工业出版社,第4版 1课程设计在培养方案中的地位、目的和任务 《综合课程设计》是配合本科通信工程专业的专业基础课程《通信原理》、《FPGA原理与应用》、《Matlab与通信仿真分析》、《单片机技术及应用》、《计算机网络》而开设的重要专业实践环节。目的是培养学生科学理论结合实际工程的能力,通过该课程设计,要求学生在掌握通信基本理论的基础上,运用Matlab、FPGA、NS-2等工具对通信子系统或计算机网络进行仿真与设计,并计算基本性能指标,从而提高学生的综合设计实践能力。 另一方面,也可通过课程设计使学生深入理解单片机的基本原理,硬件结构和工作原理。 掌握程序的编制方法和程序调试的方法,掌握常用接口的设计及使用。掌握一般接口的扩展 方法及接口的调试过程。为学生将来在通信工程、电子信息工程、测试计量技术及仪器、电 子科学与技术及其它领域应用单片机技术打下良好基础及应用实践能力。 2 课程设计的基本要求 1. 学习基本设计方法;加深对课堂知识的理解和应用。 2. 完成指定的设计任务和实验任务,理论联系实际,实现书本知识到工程实践的过渡。 3. 学会设计报告的撰写方法。 3 课程设计的内容 1. 无线收发信机部件设计