第5章频域分析法 学习要点 1 频率特性的概念,常用数学描述与图形表示方法; 2 典型环节的幅相频率特性与对数频率特性表示及特点; 3 系统开环幅相频率特性与对数频率特性的图示要点; 4 应用乃奎斯特判据判断控制系统的稳定性方法; 5 对数频率特性三频段与系统性能的关系; 6 计算频域参数与性能指标; 思考与习题祥解 题判断下列概念的正确性 ω的正弦信号加入线性系统,这个系统的稳态输出也将是同 (1) 将频率为 一频率的。 M仅与阻尼比ξ有关。 (2) 对于典型二阶系统,谐振峰值 p (3) 在开环传递函数中增加零点总是增加闭环系统的带宽。 (4) 在开环传递函数中增加极点通常将减少闭环系统的带宽并同时降低稳定性。 (5) 对于最小相位系统,如果相位裕量是负值,闭环系统总是不稳定的。 (6) 对于最小相位系统,如果幅值裕量大于1,闭环系统总是稳定的。 (7) 对于最小相位系统,如果幅值裕量是负分贝值,闭环系统总是不稳定的。 (8) 对于非最小相位系统,如果幅值裕量大于1,闭环系统总是稳定的。 (9) 对于非最小相位系统,须幅值裕量大于1且相位裕量大于0,闭环系统才是稳定的。 (10) 相位穿越频率是在这一频率处的相位为0。 (11) 幅值穿越频率是在这一频率处的幅值为0dB。 (12) 幅值裕量在相位穿越频率处测量。 (13) 相位裕量在幅值穿越频率处测量。 (14) 某系统稳定的开环放大系数25 K<,这是一个条件稳定系统。 (15) 对于(-2/ -1/ -2)特性的对称最佳系统,具有最大相位裕量。 (16) 对于(-2/ -1/ -3)特性的系统,存在一个对应最大相位裕量的开环放大系数值。 (17) 开环中具有纯时滞的闭环系统通常比没有时滞的系统稳定性低些。 (18) 开环对数幅频特性过0分贝线的渐近线斜率通常表明了闭环系统的相对稳定性。 M和频带宽BW (19) Nichols图可以用于找到一个闭环系统的谐振峰值 p 的信息。
动态电路的时域分析习题 10-1 设图(a )、(b )电路达到稳态,在0=t 时开关S 动作,试求图中所标电压、电流的初 值。 C u L i L (a) (b) 题10-1图 S 开,等效 图 如图所示: +_ t ) 1(0)i 2(0) i S 闭: t 10V 解:对(a)图 当0t -=时,求(0)C u - ~ 10 (0)(0)1510510 C C u u V +-==?=+ 0t +=时,求123(0),(0),(0)i i i +++ 1+2+15-5 (0)=(0)==0.5A 5+5 i i 3(0)0i A += (b )S 开 S 闭 …
_(0) L i _(0) (0) 2L i A _ (0) u (0)L u (0)L 对(b)图 当0t -=时,求(0)L i - (0)(0)2L L i i A +-== 当0t +=时,求(0),(0)L L u u -+ 42(0)4L u +?+= | (0)4L u +=- (0)2240u +=?-= 10-2 电路如图所示,已知Ω==421 R R ,Ω=23R ,H L 1=,V U S 121=,V U S 62=。 电路原来处于稳定状态,0=t 时,开关S 闭合,试求)0(+L i 和)0(+L u 。 { 题10-2 图 题10-2 图 解: S 开 t (0) L i 6 V S 闭 0t (0)L u 12 V 6 V 1A 当0t -=时,求(0)L i - 2 23 (0)(0)1S L L U i i A R R +-== =+ R S U - +2S L
An Introduction to Time Waveform Analysis Timothy A Dunton, Universal Technologies Inc. Abstract In recent years there has been a resurgence in the use of time waveform analysis techniques. Condition monitoring personnel have now come to realize some of the limitations of the FFT process. Since many find the time waveform analysis process difficult and confusing the technique is rarely used to its full potential. The key to the successful utilization of time waveform data is knowing when to use it. This paper examines the limitations of the FFT process and identifies specific applications where enhancing FFT information with time waveform analysis is appropriate. The paper also details in practical terms how to set up, acquire and manipulate time waveform data. Having discussed the acquisition of the data the paper continues to discuss the interpretation of the data including the time-frequency relationship, symmetry, and pattern recognition of common faults. Biography Timothy A. Dunton Vice President Product Development Born and Educated in the UK, Tim spent 14 years with Shell Tankers UK. Ltd. as a marine engineer, serving on Oil and LNG tankers in a variety of positions including Cargo Engineer. After emigrating to Canada Tim brought his practical experience to IRD Mechanalysis as a Consulting Service Engineer, providing training, software support and on site analysis services throughout Canada. In 1991 Tim joined Update International as a senior instructor where he conducted various vibration and skills related courses in both the public and in-plant arenas throughout the world. During his tenure at Update Tim assisted in development of several seminars in the subjects of vibration analysis, machinery skills and bearings. Tim was also responsible for upgrading several seminars and developing award winning multimedia interactive software. Tim is a regular speaker at various maintenance conferences throughout the world. Now with Universal Technologies, Tim’s primary responsibility is in the area of multimedia product development but he continues to be active in the teaching arena. Universal Technologies, Inc. ? Suite C-210 ? 25797 Conifer Rd. ? Aspen Park CO 80433 USA
第二章连续系统的时域分析 求响应:经典法:已知f(t)、x{0} 全响应y(t)= y f(t)+y x(t) 卷积积分法:先求n(t),已知f(t) y f(t)=h(t) f(t) 主要内容: 一经典法求LTI系统的响应: 齐次解自由响应瞬态零输入 特解强迫响应稳态(阶跃、周期)零状态二冲击响应与阶跃响应:(定义、求解方法仍为经典法)三卷积积分:(定义、图示法求卷积) 四卷积积分的性质:
§2.1 LTI 系统的响应(经典法) 一 常系数线性微分方程的经典解 n 阶:y )(n (t)+ a n-1y )1(-n (t)+…+ a 1y )1((t)+ a 0y(t) = b m f )(m (t)+ b m-1 f )1(-m (t)+……+ b 1 f )1((t)+ b 0f(t) 全解:y(t)=齐次解y h (t)+ 特解y p (t) 1 齐次解:y h (t)=∑=n i t e i C i 1 λ(形式取决于特征根) 特征方程: λ)(n (t)+ a n-1λ)1(-n (t)+… + a 1 λ(t)+ a 0=0 特征根:决定齐次解的函数形式,表2-1 如为2个单实根λ1、λ2, y h (t )=e C t 11 λ +e C t 22 λ 如为2重根(λ+1)2=0,λ= - 1,y h (t)=C 1te -t +C 0e -t 系数C i :求得全解后,由初始条件确定 2 特解: 函数形式:由激励的函数形式决定,与特征根有关系,表2-2 如:f(t)为常数 )(t ε, y p (t)=P 0 f(t)=t 2, y p (t)= P 2t 2+ P 1t+ P 0 f(t)=e -t ,λ= - 2,不等 y p (t)=P e -t f(t)= e -t ,λ= - 1,相等 y p (t)=P 1te -t +P 0e -t 系数P i :由原微分方程求出 3 全解:y(t)= y h (t)+ y p (t)=∑=n i t e i C i 1 λ+ y p (t) 此时利用y(0),y ‘(0),求出系数C i
实验二连续时间信号的频域分析 一、实验目的 1、掌握连续时间周期信号的傅里叶级数的物理意义和分析方法; 2、观察截短傅里叶级数而产生的“Gibbs现象”,了解其特点以及产生的原因; 3、掌握连续时间傅里叶变换的分析方法及其物理意义; 4、掌握各种典型的连续时间非周期信号的频谱特征以及傅里叶变换的主要性质; 5、学习掌握利用Matlab语言编写计算CTFS、CTFT和DTFT的仿真程序,并能利用这些程序对一些典型信号进行频谱分析,验证CTFT、DTFT的若干重要性质。 基本要求:掌握并深刻理傅里叶变换的物理意义,掌握信号的傅里叶变换的计算方法,掌握利用Matlab编程完成相关的傅里叶变换的计算。 二、原理说明 1、连续时间周期信号的傅里叶级数CTFS分析 任何一个周期为T 1 的正弦周期信号,只要满足狄利克利条件,就可以展开成傅里叶级数。 三角傅里叶级数为: ∑∞=+ + = 1 0 0 )] sin( ) cos( [ )( k k k t k b t k a a t xω ω 2.1
或: ∑∞ =++=100)cos()(k k k t k c a t x ?ω 2.2 其中1 02T πω=,称为信号的基本频率(Fundamental frequency ),k k b a a ,和,0分别是信号)(t x 的直流分量、余弦分量幅度和正弦分量幅度,k k c ?、为合并同频率项之后各正弦谐波分量的幅度和初相位,它们都是频率0ωk 的函数,绘制出它们与0ωk 之间的图像,称为信号的频谱图(简称“频谱”),k c -0ωk 图像为幅度谱,k ?-0ωk 图像为相位谱。 三角形式傅里叶级数表明,如果一个周期信号x(t),满足狄里克利条件,就可以被看作是由很多不同频率的互为谐波关系(harmonically related )的正弦信号所组成,其中每一个不同频率的正弦信号称为正弦谐波分量 (Sinusoid component),其幅度(amplitude )为k c 。也可以反过来理解三角傅里叶级数:用无限多个正弦谐波分量可以合成一个任意的非正弦周期信号。 指数形式的傅里叶级数为: ∑∞-∞== k t jk k e a t x 0)(ω 2.3 其中,k a 为指数形式的傅里叶级数的系数,按如下公式计算: ? --=2/2/1110)(1T T t jk k dt e t x T a ω 2.4 指数形式的傅里叶级数告诉我们,如果一个周期信号x(t),满足狄里克利条件,那么,它就可以被看作是由很多不同频率的互为谐波关系(harmonically related )的周期复指数信号所组成,其中每一个不同频率的周期复指数信号称为基本频率分量,其复幅度
《机电系统控制基础》大作业一 基于MATLAB的机电控制系统响应分析 哈尔滨工业大学 2013年11月4日
1 作业题目 1. 用MATLAB 绘制系统2 ()25()() 425 C s s R s s s Φ== ++的单位阶跃响应曲线、单位斜坡响应曲线。 2. 用MATLAB 求系统2 ()25 ()()425 C s s R s s s Φ==++的单位阶跃响应性能指标:上升时间、峰值时间、调节时间和超调量。 3. 数控直线运动工作平台位置控制示意图如下: X i 伺服电机原理图如下: L R (1)假定电动机转子轴上的转动惯量为J 1,减速器输出轴上的转动惯量为J 2,减速器减速比为i ,滚珠丝杠的螺距为P ,试计算折算到电机主轴上的总的转动惯量J ; (2)假定工作台质量m ,给定环节的传递函数为K a ,放大环节的传递函数为K b ,包括检测装置在内的反馈环节传递函数为K c ,电动机的反电势常数为K d ,电动机的电磁力矩常数为K m ,试建立该数控直线工作平台的数学模型,画出其控制系统框图; (3)忽略电感L 时,令参数K a =K c =K d =R=J=1,K m =10,P/i =4π,利用MATLAB 分析kb 的取值对于系统的性能的影响。
2 题目1 单位脉冲响应曲线 单位阶跃响应曲线
源代码 t=[0:0.01:1.6]; %仿真时间区段和输入 nC=[25]; dR=[1,4,25]; fi=tf(nC,dR); %求系统模型 [y1,T]=impulse(fi,t); [y2,T]=step(fi,t); %系统响应 plot(T,y1); xlabel('t(sec)'),ylabel('x(t)'); grid on; plot(T,y2); xlabel('t(sec)'),ylabel('x(t)'); grid on; %生成图形 3 题目2 借助Matlab,可得: ans = 0.4330 0.6860 25.3826 1.0000 即
第三章 控制系统的时域分析法 一、知识点总结 1.掌握典型输入信号(单位脉冲、单位阶跃、单位速度、单位加速度、正弦信号)的拉氏变换表达式。 2.掌握系统动态响应的概念,能够从系统的响应中分离出稳态响应分量和瞬态响应分量;掌握系统动态响应的性能评价指标的概念及计算方法(对于典型二阶系统可以直接应用公式求解,非典型二阶系统则应按定义求解)。 解释:若将系统的响应表达成拉普拉氏变换结果(即S 域表达式),将响应表达式进行部分分式展开,与系统输入信号极点相同的分式对应稳态响应;与传递函数极点相同的分式对应系统的瞬态响应。将稳态响应和瞬态响应分式分别进行拉氏逆变换即获得各自的时域表达式。 性能指标:延迟时间、上升时间、峰值时间、调节时间、超调量 3.掌握一阶系统的传递函数形式,在典型输入信号下的时域响应及其响应特征;掌握典型二阶系统的传递函数形式,掌握欠阻尼系统的阶跃响应时域表达及其性能指标的计算公式和计算方法;了解高阶系统的性能分析方法,熟悉主导极点的概念,定性了解高阶系统非主导极点和零点对系统性能的影响。 tr tp ts td
4.熟悉两种改善二阶系统性能的方法和结构形式(比例微分和测速反馈),了解两种方法改善系统性能的特点。 5.掌握系统稳定性分析方法:劳斯判据的判断系统稳定性的判据及劳斯判据表特殊情况的构建方法(首列元素出现0,首列出现无穷大,某一行全为0);掌握应用劳斯判据解决系统稳定裕度问题的方法。了解赫尔维茨稳定性判据。 6.掌握稳态误差的概念和计算方法;掌握根据系统型别和静态误差系数计算典型输入下的稳态误差的方法(可直接应用公式);了解消除稳态误差和干扰误差的方法;了解动态误差系数法。 二、相关知识点例题 例1. 已知某系统的方块图如下图1所示,若要求系统的性能指标为: δδ%=2222%,tt pp=1111,试确定K和τ的值,并计算系统单位阶跃输入下的特征响应量:tt,tt。 图1 解:系统闭环传递函数为:Φ(s)=CC(ss)RR(ss)=KK ss2+(1+KKKK)ss+KK 因此,ωnn=√KK,ζζ=1+KKKK2√KK, δ%=e?ππππ?1?ππ2?ζζ=0.46, t pp=ππωωdd=1ss?ωdd=ωnn?1?ζζ2=3.14 ?ωnn=3.54 K=ωnn2=12.53,τ=2ζζωnn?1KK=0.18 t ss=3ζζωωnn=1.84ss
第五章 频域分析法 时域分析法具有直观、准确的优点。如果描述系统的微分方程是一阶或二阶的,求解后可利用时域指标直接评估系统的性能。然而实际系统往往都是高阶的,要建立和求解高阶系统的微分方程比较困难。而且,按照给定的时域指标设计高阶系统也不是一件容易的事。 本章介绍的频域分析法,可以弥补时域分析法的不足。因为频域法是基于频率特性或频率响应对系统进行分析和设计的一种图解方法,故其与时域分析法相比有较多的优点。首先,只要求出系统的开环频率特性,就可以判断闭环系统是否稳定。其次,由系统的频率特性所确定的频域指标与系统的时域指标之间存在着一定的对应关系,而系统的频率特性又很容易和它的结构、参数联系起来。因而可以根据频率特性曲线的形状去选择系统的结构和参数,使之满足时域指标的要求。此外,频率特性不但可由微分方程或传递函数求得,而且还可以用实验方法求得。对于某些难以用机理分析方法建立微分方程或传递函数的元件(或系统)来说,具有重要的意义。因此,频率法得到了广泛的应用,它也是经典控制理论中的重点内容。 5.1 频率特性 对于线性定常系统,若输入端作用一个正弦信号 t U t u ωsin )(= (5—1) 则系统的稳态输出y(t)也为正弦信号,且频率与输人信号的频率相同,即 ) t Y t y ?ω+=sin()( (5—2) u(t)和y(t)虽然频率相同,但幅值和相位不同,并且随着输入信号的角频率ω的改变,两者之间的振幅与相位关系也随之改变。这种基于频率ω的系统输入和输出之间的关系称之为系统的频率特性。 不失一般性,设线性定常系统的传递函数G(s)可以写成如下形式 ) () () () () ())(() ()()()(1 21s A s B p s s B p s p s p s s B s U s Y s G n j j n = +=+++== ∏=Λ (5—3) 式中B(s)——传递函数G(s)的m 阶分子多项式,s 为复变量; A(s)——传递函数G(s)的n 阶分母多项式 (n ≥m); n p p p ---,,,21Λ—传递函数G(s)的极点,这些极点可能是实数,也可能是复数,对稳定的系统采说,它们都应该有负的实部。 由式(5—1),正弦输入信号u(t)的拉氏变换为(查拉氏变换表) ) )(()(22ωωω ωωj s j s U s U s U -+=+= (5—4)
第二章 连续系统的时域分析习题解答 2-1 图题2-1所示各电路中,激励为f (t ),响应为i 0(t )和u 0(t )。试列写各响应关于 激励微分算子方程。 解: . 1)p ( ; )1(1)p ( , 111 , 1 111)( )b (; 105.7)625(3 102 ; )(375)()6253(4) ()()61002.041( )a (0202200 204006000f i p f p u p f p p p u i f p p p p p f t u pf i p pu i t f t u p t f t u p =+++=++?++=+=+++= ++= ?=+??==+?=++-- 2-2 求图题2-1各电路中响应i 0(t )和u 0(t )对激励f (t )的传输算子H (p )。 } 解:. 1 )()()( ; 11)()()( )b (; 625 3105.7)()()( ; 6253375)()()( )a (220 20 40 0 +++==+++==+?==+== -p p p p t f t i p H p p p t f t u p H p p t f t i p H p t f t u p H f i f u f i f u 2-3 给定如下传输算子H (p ),试写出它们对应的微分方程。 . ) 2)(1() 3()( )4( ; 323)( )3(; 3 3)( )2( ; 3)( )1( +++=++=++=+= p p p p p H p p p H p p p H p p p H 解:; 3d d 3d d )2( ; d d 3d d )1( f t f y t y t f y t y +=+=+ . d d 3d d 2d d 3d d )4( ; 3d d 3d d 2 )3( 2222t f t f y t y t y f t f y t y +=+++=+ 2-4 已知连续系统的输入输出算子方程及0– 初始条件为: . 4)(0y ,0)(0y )y(0 ),()2(1 3)( )3(; 0)(0y ,1)(0y ,0)y(0 ),()84() 12()( )2(; 1)(0y ,2)y(0 ),()3)(1(4 2)( )1(---2 ---2 --=''='=++==''='=+++-=='=+++= t f p p p t y t f p p p p t y t f p p p t y 1 f (u 0(t ) (b) @ f (t ) 4k 6k 2F } u 0(t ) (a) 图题2-1
实验报告 实验名称:实验1:控制系统的时域分析 课程名称:自控控制原理 专业:电气工程及其自动化 班级:130037 学生姓名:施苏伟 班级学号:13003723 指导教师:杨杨 实验日期:2015 年10 月16日
一、实验目的 1.观察控制系统的时域响应; 2.记录单位阶跃响应曲线; 3.掌握时间响应分析的一般方法; 4.初步了解控制系统的调节过程。 二.实验步骤: 1.将‘实验一代码’这个文件夹拷贝到桌面上; 2.开机进入Matlab6.1 运行界面(其他版本亦可); 3.通过下面方法将当前路径设置为‘实验一代码’这个文件夹所在的路径 4.Matlab 指令窗>>后面输入指令:con_sys; 进入本次实验主界面。 5.分别双击上图中的三个按键,依次完成实验内容。
6.本次实验的相关Matlab 函数: 传递函数G=tf([num],[den])可输入一传递函数,其中num、den 分别表示分子、分母按降幂排列的系数。 三、仿真结果: (一)观察一阶系统G=1/(T+s)的时域响应: T=5s T=8s
T=13s 结果分析:一阶系统 G=1/(T+s)的,通过观察曲线发现,随着时间常数T的增大,同种响应要达到相同响应的时间增大,说明T越大,响应越慢。 (二)二阶系统的时域性能分析 (1)
结果分析:自然频率和阻尼比的适当时,通过调节相应的时间,阶跃响应可以得到稳定值。 (2)数据一:自然频率=5.96rad/sec 阻尼比=0.701
数据二:自然频率=8.2964rad/sec 阻尼比=0.701 结果分析:要达到既定范围,自然频率增大阻尼比要随之增大 (3)
实验2 LTI 系统的时域分析 (基础型实验) 一. 实验目的 1. 掌握利用MATLAB 对系统进行时域分析的方法。 2. 掌握连续时间系统零状态响应、冲击响应和阶跃响应的求解方法。 3. 掌握求解离散时间系统响应、单位抽样响应的方法。 4. 加深对卷积积分和卷积和的理解。掌握利用计算机进行卷积积分和卷积和计算的方法。 二. 实验原理与方法 1. 连续时间系统时域分析的MATLAB 实现 1) 连续时间系统的MA TLAB 表示 LTI 连续系统通常可以由系统微分方程描述,设描述系统的微分方程为: (N)(N 1)(M)(M 1)1010(t)(t)...(t)b (t)b (t)...b (t)N N M M a y a y a y x x x ----++=++ 则在MATLAB 中可以建立系统模型如下: 1010[b ,b ,...,b ];a [a ,a ,...,a ];sys tf(b,a); M M N N b --=== 其中,tf 是用于创建系统模型的函数,向量a 和b 的元素是以微分方程求导的降幂次序来排列的,如果有缺项,应用0补齐,例如由微分方程 2''(t)y'(t)3y(t)x(t)y ++= 描述的系统可以表示为: >> b=[1]; >> a=[2 1 3]; >> sys=tf(b,a); 而微分方程由 ''(t)y'(t)y(t)x''(t)x(t)y ++=- 描述的系统则要表示成 >> b=[1 0 -1]; >> a=[1 1 1]; >> sys=tf(b,a); 2) 连续时间系统的零状态响应 零状态响应指系统的初始状态为零,仅由初始信号所引起的响应。MATLAB 提供了一个用于求解零状态响应的函数lism ,其调用格式如下: lism (sys,x,t )绘出输入信号及响应的波形,x 和t 表示输入信号数值向量及其时间向量。 y= lism (sys,x,t )这种调用格式不绘出波形,而是返回响应的数值向量。 3) 连续时间系统的冲激响应与阶跃响应
第5章频域分析法 5.1 学习要点 1 频率特性的概念,常用数学描述与图形表示方法; 2 典型环节的幅相频率特性与对数频率特性表示及特点; 3 系统开环幅相频率特性与对数频率特性的图示要点; 4 应用乃奎斯特判据判断控制系统的稳定性方法; 5 对数频率特性三频段与系统性能的关系; 6 计算频域参数与性能指标; 5.2 思考与习题祥解 题5.1 判断下列概念的正确性 ω的正弦信号加入线性系统,这个系统的稳态输出也将是同 (1) 将频率为 一频率的。 M仅与阻尼比ξ有关。 (2) 对于典型二阶系统,谐振峰值 p (3) 在开环传递函数中增加零点总是增加闭环系统的带宽。 (4) 在开环传递函数中增加极点通常将减少闭环系统的带宽并同时降低稳定性。 (5) 对于最小相位系统,如果相位裕量是负值,闭环系统总是不稳定的。 (6) 对于最小相位系统,如果幅值裕量大于1,闭环系统总是稳定的。 (7) 对于最小相位系统,如果幅值裕量是负分贝值,闭环系统总是不稳定的。 (8) 对于非最小相位系统,如果幅值裕量大于1,闭环系统总是稳定的。 (9) 对于非最小相位系统,须幅值裕量大于1且相位裕量大于0,闭环系统才是稳定的。 (10) 相位穿越频率是在这一频率处的相位为0。 (11) 幅值穿越频率是在这一频率处的幅值为0dB。 (12) 幅值裕量在相位穿越频率处测量。 (13) 相位裕量在幅值穿越频率处测量。 (14) 某系统稳定的开环放大系数25 K<,这是一个条件稳定系统。 (15) 对于(-2/ -1/ -2)特性的对称最佳系统,具有最大相位裕量。 (16) 对于(-2/ -1/ -3)特性的系统,存在一个对应最大相位裕量的开环放大系数值。 (17) 开环中具有纯时滞的闭环系统通常比没有时滞的系统稳定性低些。 (18) 开环对数幅频特性过0分贝线的渐近线斜率通常表明了闭环系统的相对稳定性。 M和频带宽BW (19) Nichols图可以用于找到一个闭环系统的谐振峰值 p 的信息。
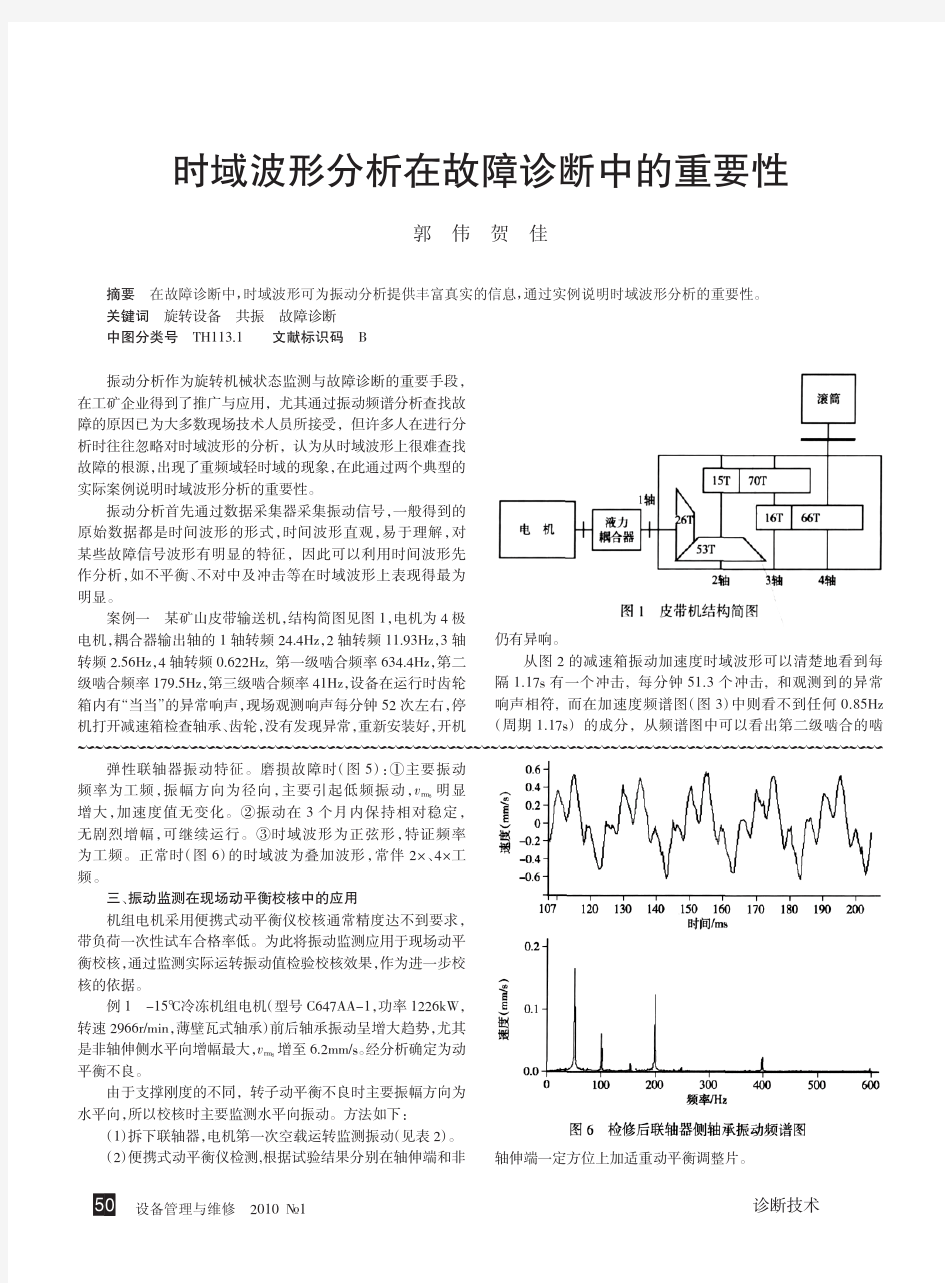
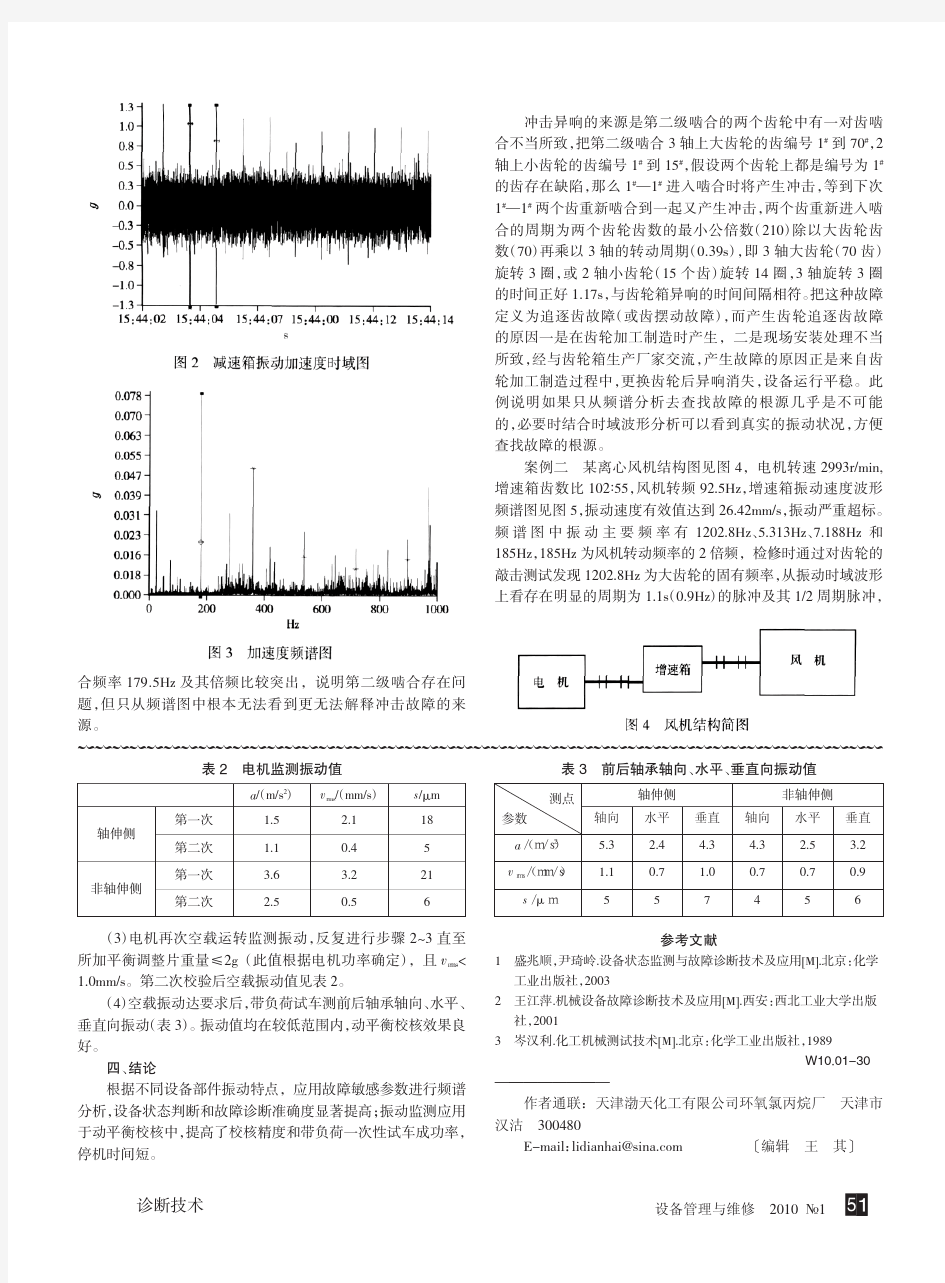
机械振动故障诊断中时域参数指标的分析 一、滚动轴承的失效形式 1.疲劳剥落 在滚动轴承的滚动或滚动体表面,由于承受交变负荷的作用是接触面表层金属呈片状玻剥落,并逐步扩大而形成凹坑。如继续运转,则将形成面积剥落区域。由于安装不当或轴承座孔与轴的中心线倾斜等原因将使轴承中局部区域承受较大负荷而出现早期疲劳破坏。 2.磨损 当滚动轴承密封不好,使灰尘或微粒物质进入轴承,或是润滑不良,将引起接触表面较严重的擦伤或磨损,并使轴承的振动和噪声增大。 3.断裂和裂纹 材料缺陷和热处理不当,配合过硬两太大,组合设计不当,如支撑面有沟槽而引起应力集中等,将形成套圈裂纹和断裂。 4.压痕 外接硬颗粒物质进入轴承中,并压在滚动体与滚道之间,可是滚动表面形成压痕。此外,过大的冲击负荷也可以使接触表面产生局部塑性变形而形成凹坑。当轴承静止时,即使负荷很小,由于周围环境的振动也将在滚道上形成均匀分布的凹坑。 5.腐蚀 电机或者机械漏电或者有部分静电时产生电流,一般轴承都是需要使用,在轴承内部可以在轴承的内圈、外圈、滚动体之间产生油膜(很薄左右),电流可以击穿轴承内部的(油膜),造成轴承内圈、外圈、滚动体之间的直接接触、在接触的表面会产生电击,对轴承的沟道造成损伤,从而引起轴承早期失效。 6.胶合 指滚道和滚动体表面由于受热而局部融合在一起的现象。常发生在润滑不良、告诉、重在、高温、启动加速度过大等情况下。由于摩擦发热,轴承零件可以在极短时间内达到很高的温度,导致表面灼伤或某处表面上的金属粘附到另一表面上。 二、时域参数主要参数指标 峰值、均值、方差、歪度、峭度、均方根值,波形指标、脉冲指标、峭度指标、歪度指标和裕度指标。其中前一类是有量纲指标,后一类是无量纲指标。 1.峰值 在某个时间段内幅值的最大值。由于它是一个时不稳参数,不同的时刻变动很大,因此常用来检测冲击振动。 2.均值 指在一组数据中所有数据之和再除以这组数据的个数,这里指所有幅值的均值。反映了数据趋势的大小。信号的均值反映信号中的静态部分,一般对诊断不起作用,但对计算其它参数有很大影响,所以,一般在计算时应先从数据中去除均值,剩下对诊断有用的动态部分。 计算表达式:11N i i x x N ==∑。 3.均方根值 也称有效值,在电路中定义为一确定的交流电相当于多大数值的交流电在相同时间内所做的功一样。它用来反应信号的能量大小,特别适用于具有随机振动的性质的轴承测量。在滚动轴承的故障诊断中,均方根值可以用来反应各个滚动体在滚道上运动时,由于制造精度差以及工作表面点蚀所产生的不规则振动状况。制造精度愈低或轴承磨损程度愈大,则均方根值值愈高。对于正常轴承以及表面发生点蚀的轴承均方根值很稳定,不受偶然因素的干扰;但对于表面剥落或局部损伤产生的冲击脉冲振动波形,脉冲幅值的大小均方根值是反映不出来的。
课程名称:控制理论指导老师:成绩: 实验名称:控制系统的时域分析实验类型:冋组学生姓名: 、实验目的和要求 1用计算机辅助分析的办法,掌握系统的时域分析方法。 2. 熟悉SimUlink仿真环境。 二、实验内容和原理 (一)实验原理 系统仿真实质上就是对系统模型的求解,对控制系统来说,一般模型可转化成某个微分方程或差分方程表示,因此在仿真过程中,一般以某种数值算法从初态出发,逐步计算系统的响应,最后绘制出系统的响应曲线,进而可分析系统的性能。控制系统最常用的时域分析方法是,当输入信号为单位阶跃和单位冲激函数时,求出系统的输出响应,分别称为单位阶跃响应和单位冲激响应。在MATLAB中,提供了求取连 续系统的单位阶跃响应函数step,单位冲激响应函数impulse,零输入响应函数initial等等。 (二)实验内容 二阶系统,其状态方程模型为 U X I y = [1.9691 6.4493] +[0] U X2 1?画出系统的单位阶跃响应曲线; 2. 画出系统的冲激响应曲线; 3. 当系统的初始状态为x0=[1,0]时,画出系统的零输入响应; 4. 当系统的初始状态为零时,画出系统斜坡输入响应; (三)实验要求 1. 编制MATLAB程序,画出单位阶跃响应曲线、冲击响应曲线、系统的零输入响应、斜坡输入响应; 2. 在SimUIink仿真环境中,组成系统的仿真框图,观察单位阶跃响应曲线并记录之。 三、主要仪器设备 计算机一台以及matlab软件,SimUIink仿真环境 四、操作方法与实验步骤 1、程序解决方案: 在MATLAB 中建立文件shiyu.m ,其程序如下: %时域响应函数 fun ction G1 = shiyu( A,B,C,D)
课程设计任务书 学生姓名:专业班级: 指导教师:工作单位: 题目: 连续时间信号和系统时域分析及MATLAB实现 初始条件: MATLAB 6.5 要求完成的主要任务: 一、用MATLAB实现常用连续时间信号的时域波形(通过改变参数,分析其时域特性)。 1、单位阶跃信号, 2、单位冲激信号, 3、正弦信号, 4、实指数信号, 5、虚指数信号, 6、复指数信号。 二、用MATLAB实现信号的时域运算 1、相加, 2、相乘, 3、数乘, 4、微分, 5、积分 三、用MATLAB实现信号的时域变换(参数变化,分析波形变化) 1、反转, 2、使移(超时,延时), 3、展缩, 4、倒相, 5、综合变化 四、用MATLAB实现信号简单的时域分解 1、信号的交直流分解, 2、信号的奇偶分解 五、用MATLAB实现连续时间系统的卷积积分的仿真波形 给出几个典型例子,对每个例子,要求画出对应波形。 六、用MATLAB实现连续时间系统的冲激响应、阶跃响应的仿真波形。 给出几个典型例子,四种调用格式。 七、利用MATLAB实现连续时间系统对正弦信号、实指数信号的零状态响应的仿真波形。 给出几个典型例子,要求可以改变激励的参数,分析波形的变化。
时间安排: 学习MATLAB语言的概况第1天 学习MATLAB语言的基本知识第2、3天 学习MATLAB语言的应用环境,调试命令,绘图能力第4、5天 课程设计第6-9天 答辩第10天 指导教师签名:年月日系主任(或责任教师)签名:年月日
目录 摘要.................................................................................................................................................. I ABSTRACT ................................................................................................................................... II 绪论. (1) 1 MATLAB简介 (2) 1.1MATLAB语言功能 (2) 1.2MATLAB语言特点 (2) 2常用连续时间信号的时域波形 (3) 2.1单位阶跃信号 (3) 2.2单位冲激信号 (3) 2.3正弦信号 (4) 2.4实指数信号 (5) 2.5虚指数信号 (5) 2.6复指数信号 (6) 3 连续时间信号的时域运算 (7) 3.1相加 (7) 3.2相乘 (7) 3.3数乘 (8) 3.4微分 (8) 3.5积分 (9) 4 连续时间信号的时域变换 (10) 4.1反转 (10) 4.2时移 (10) 4.3展缩 (11) 4.4倒相 (11) 4.5综合变化 (12) 5连续时间信号简单的时域分解 (13) 5.1信号的交直流分解 (13) 5.2信号的奇偶分解 (14) 6连续时间系统的卷积积分的仿真波形 (15) 7连续时间系统的冲激响应、阶跃响应的仿真波形 (16) 7.1 IMPULSE()函数 (17) 7.2 STEP()函数 (19) 8连续时间系统对正弦信号、实指数信号的零状态响应的仿真波形 (21) 8.1正弦信号的零状态响应 (21) 8.2实指数信号的零状态响应 (22) 9小结即心得体会 (24) 致谢 (25) 参考文献 (26) 附录 (27)
实验三 连续时间LTI 系统的时域分析 一、实验目的 1、学会使用符号法求解连续系统的零输入响应和零状态响应 2、学会使用数值法求解连续系统的零状态响应 3、学会求解连续系统的冲激响应和阶跃响应 二、实验原理及实例分析 1、连续时间系统零输入响应和零状态响应的符号求解 连续时间系统可以使用常系数微分方程来描述,其完全响应由零输入响应和零状态响应组成。MATLAB 符号工具箱提供了dsolve 函数,可以实现对常系数微分方程的符号求解,其调用格式为: dsolve(‘eq1,eq2…’,’cond1,cond2,…’,’v’) 其中参数eq 表示各个微分方程,它与MATLAB 符号表达式的输入基本相同,微分和导数的输入是使用Dy ,D2y ,D3y 来表示y 的一价导数,二阶导数,三阶导数;参数cond 表示初始条件或者起始条件;参数v 表示自变量,默认是变量t 。通过使用dsolve 函数可以求出系统微分方程的零输入响应和零状态响应,进而求出完全响应。 [实例1]试用Matlab 命令求齐次微分方程0)()(2)(='+''+'''t y t y t y 的零输入响应,已知起始条件为2)0(,1)0(,1)0(=''='=---y y y 。
3、连续时间系统冲激响应和阶跃响应的求解 在连续时间LTI系统中,冲激响应和阶跃响应是系统特性的描述。在MATLAB中,对于冲激响应和阶跃响应的数值求解,可以使用控制工具箱中提供的函数impulse和step来求解。 ) , ( ) , ( t sys step y t sys impulse y = = 其中t表示系统响应的时间抽样点向量,sys表示LTI系统模型。
一、实验目的 1、掌握连续时间周期信号的傅里叶级数的物理意义和分析方法; 2、观察截短傅里叶级数而产生的“Gibbs 现象”,了解其特点以及产生的原因; 3、掌握连续时间傅里叶变换的分析方法及其物理意义; 4、学习利用MATLAB 语言编写计算CTFS 和CTFT 的仿真程序。 基本要求:掌握并深刻理傅里叶变换的物理意义,掌握信号的傅里叶变换的计算方法,掌握利用MATLAB 编程完成相关的傅里叶变换的计算。 二、实验原理及方法 1、连续时间周期信号的傅里叶级数CTFS 分析 任何一个周期为T 1的正弦周期信号,只要满足狄利克利条件,就可以展开成傅里叶级数。 其中三角傅里叶级数为: ∑∞ =++=1000)]sin()cos([)(k k k t k b t k a a t x ωω 9.1 或: ∑∞ =++ =1 00)cos()(k k k t k c a t x ?ω 9.2 其中1 02T π ω= ,称为信号的基本频率,k k b a a ,和,0分别是信号)(t x 的直流分量、余弦分量幅度和正弦分量幅度,k k c ?、为合并同频率项之后各正弦谐波分量的幅度和初相位,它们都是频率0ωk 的函数,绘制出它们与0ωk 之间的图像,称为信号的频谱图(简称“频谱”), k c -0ωk 图像为幅度谱,k ?-0ωk 图像为相位谱。 指数形式的傅里叶级数为: ∑∞ -∞ == k t jk k e a t x 0)(ω 9.3 其中,k a 为指数形式的傅里叶级数的系数,按如下公式计算:
? --= 2 /2 /1 110)(1 T T t jk k dt e t x T a ω 9.4 假设谐波项数为N ,则上面的和成式为: ∑-== N N k t jk k e a t x 0)(ω 9.5 显然,N 越大,所选项数越多,有限项级数合成的结果越逼近原信号x(t)。 2、连续时间信号傅里叶变换----CTFT 傅里叶变换在信号分析中具有非常重要的意义,它主要是用来进行信号的频谱分析的。傅里叶变换和其逆变换定义如下: ?∞ ∞ --= dt e t x j X t j ωω)()( 9.6 ? ∞ ∞ -= ωωπ ωd e j X t x t j )(21 )( 9.7 连续时间傅里叶变换主要用来描述连续时间非周期信号的频谱。任意非周期信号,如果满足狄里克利条件,那么,它可以被看作是由无穷多个不同频率(这些频率都是非常的接近)的周期复指数信号e j ωt 的线性组合构成的,每个频率所对应的周期复指数信号e j ωt 称为频率分量其相对幅度为对应频率的|X(j ω)|之值,其相位为对应频率的X(j ω)的相位。 给定一个连续时间非周期信号x(t),它的频谱也是连续且非周期的。对于连续时间周期信号,也可以用傅里变换来表示其频谱,其特点是,连续时间周期信号的傅里叶变换时有冲激序列构成的,是离散的——这是连续时间周期信号的傅里叶变换的基本特征。 3、连续周期信号的傅里叶级数CTFS 的MATLAB 实现 3.1 傅里叶级数的MATLAB 计算 设周期信号x(t)的基本周期为T 1,且满足狄里克利条件,则其傅里叶级数的系数可由式9.4计算得到。式9.4重写如下: ?--= 2 /2 /1 110)(1T T t jk k dt e t x T a ω 基本频率为: 1 02T πω= 对周期信号进行分析时,我们往往只需对其在一个周期内进行分析即可,通常选择主周期。假定x 1(t)是x(t)中的主周期,则
第3章 线性系统的时域分析 学习要点 1控制系统时域响应的基本概念,典型输入信号及意义; 2控制系统稳定性的概念、代数稳定判据及应用; 3控制系统的时域指标,一阶二阶系统的阶跃响应特性与时域指标计算; 4高阶系统时域分析中主导极点和主导极点法; 5 控制系统稳态误差概念、计算方法与误差系数,减小稳态误差的方法。 思考与习题祥解 题 思考与总结下述问题。 (1)画出二阶系统特征根在复平面上分布的几种情况,归纳ξ值对二阶系统特征根的影响规律。 【 (2)总结ξ和n ω对二阶系统阶跃响应特性的影响规律。 (3)总结增加一个零点对二阶系统阶跃响应特性的影响规律。 (4)分析增加一个极点可能对二阶系统阶跃响应特性有何影响 (5)系统误差与哪些因素有关试归纳减小或消除系统稳态误差的措施与方法。 (6)为减小或消除系统扰动误差,可采取在系统开环传递函数中增加积分环节的措施。请问,该积分环节应在系统结构图中如何配置,抗扰效果是否与扰动点相关 答:(1)二阶系统特征根在复平面上分布情况如图所示。 图 二阶系统特征根在复平面上的分布 当0ξ=,二阶系统特征根是一对共轭纯虚根,如图中情况①。 当01ξ<<,二阶系统特征根是一对具有负实部的共轭复数根,变化轨迹是 以n ω为半径的圆弧,如图中情况②。 @ 当1ξ=,二阶系统特征根是一对相同的负实根,如图中情况③。 当1ξ>,二阶系统特征根是一对不等的负实根,如图中情况④。
(2)ξ和n ω是二阶系统的两个特征参量。 ξ是系统阻尼比,描述了系统的平稳性。 当0ξ=,二阶系统特征根是一对共轭纯虚根,二阶系统阶跃响应为等幅振荡特性,系统临界稳定。 当01ξ<<,二阶系统特征根是一对具有负实部的共轭复数根,二阶系统阶跃响应为衰减振荡特性,系统稳定。ξ越小,二阶系统振荡性越强,平稳性越差; ξ越大,二阶系统振荡性越弱,平稳性越好。因此,二阶系统的时域性能指标超 调量由ξ值唯一确定,即001_ 100%2 ?=-π ξξ σe 。在工程设计中,对于恒值控制系 统,一般取 ξ=~;对于随动控制系统ξ=~。 n ω是系统无阻尼自然振荡频率,反映系统的快速性。当ξ一定,二阶系统的 时域性能指标调节时间与n ω值成反比,即34 s n t ξω≈。 (3)二阶系统增加一个零点后,增加了系统的振荡性,将使系统阶跃响应的超调量增大,上升时间和峰值时间减小。 所增加的零点越靠近虚轴,则上述影响就越大;反之,若零点距离虚轴越远,则其影响越小。 (4)二阶系统增加一个极点后,减弱了系统的振荡性,将使系统阶跃响应的超调量减小,上升时间和峰值时间减小; 所增加的极点越靠近虚轴,则上述影响就越大;反之,若极点距离虚轴越远,则其影响越小。 & (5)系统误差与系统的误差度(开环传递函数所含纯积分环节的个数或系统型别)、开环放大系数,以及作用于系统的外部输入信号有关。如果是扰动误差还与扰动作用点有关。 因此,减小或消除系统稳态误差的措施与方法有:增大开环放大系数,增加系统开环传递函数中的积分环节,引入按给定或按扰动补偿的复合控制结构。 无论采用何种措施与方法减小或消除系统稳态误差,都要注意系统须满足稳定的条件。 (6)采取在系统开环传递函数中增加积分环节的措施来减小或消除系统扰动误差时,所增加的积分环节须加在扰动作用点之前。若所增加的积分环节加在扰动作用点之后,则该积分环节无改善抗扰效果作用。这一点可以通过误差表达式分析得到。 题系统特征方程如下,试判断其稳定性。 (a )0203.002.023=+++s s s ; (b )014844122345=+++++s s s s s ; (c )025266.225.11.0234=++++s s s s ! 解:(a )稳定; (b )稳定; (c )不稳定。