
姚连璧,朱照宏(同济大学道路与交通工程系,上海200092)
摘要:探讨了RTK技术在道路定测中应用的有关问题,包括适用于RTK作业的道路中线任意点坐标的计算、坐标转换、高程计算等,提出了相应的数学模型及处理方法,为改进道路勘测手段、拓展RTK技术的应用领域起到促进作用。
关键词:GPS;RTK技术;定测;坐标;高程中图分类号:U412.245
文献标识码:A
RTK是GPS应用中的最新技术,它是实时载波相位测量的简称。RTK技术要求有一参考站,参考站放在坐标与高程己知的点位上,它包括GPS接收机及数据链发射电包参考站不断接收卫星信号并把信号通过电台传输给它周围的用户,即移动站。一个参考站可服务于多个移动站,移动站由GPS接收机、数据链接收电台、手持计算机(它与一般的便携式计算机不同,必要的应用程序固化在计算机中)等组成,电台负责接收由参考站发出的信号,该信息与移动站接收到的卫星信息进行相位差分解计算,即可获得移动站的准确坐标并显示在手持计算机的屏幕上RTK技术在近几年逐步走向成熟并不断有新产品问世。利用RTK技术进行测量有如下优点:①具有GPS测量所共有的特点,如全球适用,不受气候、时间影晚不需通帆②可实时获得具有厘米级精度的点位坐标。以往都是通过后处理未获得厘米级的点位坐标,实时处理大大提高了作业的效率,并且保证了数据的质量,同时扩大了GPS应用的领域,比如施工放样笔③可在运动过程中连续高精度采样。
由于RTK技术只能把测得的坐标显示在屏幕上,它不能如常规仪器(经纬仪、钢尺等)标定方向、测量距高,虽然可以把一些整桩、关系加桩预先算出其坐标,然后按坐标去放样,但中线测量和单纯的点位放样不同,因为在中线测量过程中还会遇到许多地形、地物等加桩,需根据现场确定出位于中线上的特征点并定出其里程。要解决这个问题可根据设计数据把线路显示在手持计算机上,在屏幕上注明整桩及曲线主点的桩位,对于临时地形、地物加桩由于整个线路中线己显示在屏幕上,通过与接收机的点位坐标的比较便可找到位于中线上的地形或地物加桩,其里程可按一定的算法算出。因此首先需要根据设计数据连续计算线路上各点在线路坐标系中的坐标。其次,GPS测量的结果是属于W GS-84坐标系的,要进行放样就需要把该结果转化到线路坐标系需要进一步进行处理以获得中桩的高程。
1.线路坐标系中中线点位坐标计算
1.1坐标计算的数学模型
目前的道路设计中主要使用直线、圆曲线、缓和曲线三种线型,其中直线的曲率K-0圆曲线的曲率K-l/R(R为设计半径),缓和曲线设计时道循RL-A’(A’为常数)的原则,距起点L处的曲率K-l/R-L /A’,即与线路的长度成比例发生变化。因此整个线路
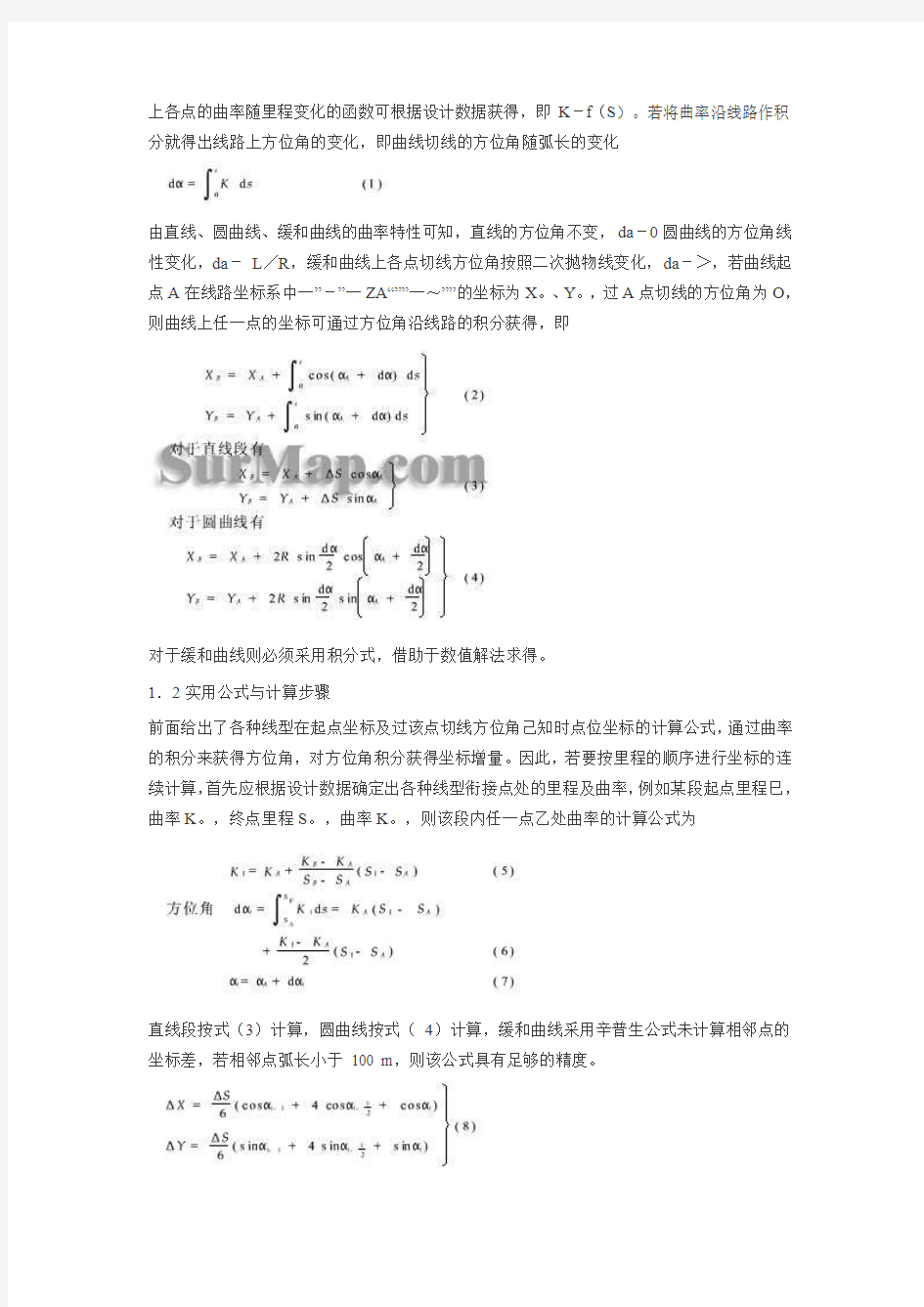
上各点的曲率随里程变化的函数可根据设计数据获得,即K-f(S)。若将曲率沿线路作积分就得出线路上方位角的变化,即曲线切线的方位角随弧长的变化
由直线、圆曲线、缓和曲线的曲率特性可知,直线的方位角不变,da-0圆曲线的方位角线性变化,da-L/R,缓和曲线上各点切线方位角按照二次抛物线变化,da->,若曲线起点A在线路坐标系中一”-”一ZA“””一~””的坐标为X。、Y。,过A点切线的方位角为O,则曲线上任一点的坐标可通过方位角沿线路的积分获得,即
对于缓和曲线则必须采用积分式,借助于数值解法求得。
1.2实用公式与计算步骤
前面给出了各种线型在起点坐标及过该点切线方位角己知时点位坐标的计算公式,通过曲率的积分来获得方位角,对方位角积分获得坐标增量。因此,若要按里程的顺序进行坐标的连续计算,首先应根据设计数据确定出各种线型衔接点处的里程及曲率,例如某段起点里程巳,曲率K。,终点里程S。,曲率K。,则该段内任一点乙处曲率的计算公式为
直线段按式(3)计算,圆曲线按式(4)计算,缓和曲线采用辛普生公式未计算相邻点的坐标差,若相邻点弧长小于100 m,则该公式具有足够的精度。
根据上述公式即可算出每一个点的坐标及切线方向的方位角。实际计算时可选较小的间隔进行计算以淮确地把中线绘制在屏幕上。在连续计算时线路有左偏、右偏之分,因此左偏曲率取负,右偏曲率取正,以保证积分后对方位角大小的影响的淮确性。由上述可知其实际计算步骤为:
(l)根据设计数据计算各段曲线衔接处的里程,并给出其曲率值;
(2)由给出路线起始点方位角。计算。;
(3)计算坐标增量;
(4)通过连续累加即可算出各点的线路坐泳该算法适用于各种线型及其相互组乞如S型、凸型及复合型,因其曲率在每一组合段中都是线性变化的,其衔接处的曲率也很容易给出,因此都是适用的。
2.坐标转换与高程计算
道路中线各点的坐标都是表示在线路坐标系中的,而GPS卫星采用的是W GS-84坐标系统,测量的结果也是属于该坐标系盼因此要把该结果实时转换到线路坐标系中才能使两者进行比较。另外,在平面位置满足要求以后还要其高程信息,而GPS测得的是大地高,还要将其转换为水淮高才能绘制横断面图,下面分别讨论坐标转换与高程计算问觊
2.1坐标转换
为在定测中运用RTK技术,应首先建立RTK作业的基淮站网络,即控制网。点之间的距离可以是几公里或十几公里,这此点构成线路的首级控制网,它不仅有W GS-84坐标,同
时也有线路坐标系的坐标。在RTK作业时应求得转换参数以进行两种坐标系的实时转换,
在两个控制点间的线路应选用该
因此由上式可计算各点在线路坐标系中的坐标。在进行RTK作业时应把参数输入到手持机中并在己知点上进行检核,以确保其淮确性。无论线路坐标系采用的是国家坐标、城市坐标或工程独立坐标,该模型均适用。同时该模型对中央子午线、投影面高程等参数的不淮确性产生的影响不敏感,只是反映在转换参数上有所不同,对转换的结果影响很小。
2.2高程计算
在线路工程中完全用GPS替代基平测量尚有一定的困难,基平仍由水准或测距三角高程未完成,基平一般每l-2 km布设一个水淮点,在基平点选择及GPS线路控制时应顾及两者有足够多的重合点这样保证每2- 3 km有一个重合点这时采用拟合模型其误差就能得到有效的控制,拟合后相对于基平水淮点高程中误差可在2-3 cm以内,这样的精度可以满足中平测量以及野外地形数据采集对高程的精度要求。
线性带状工程(如铁路、公路)在纵向有时可达到几百公里,在横向上却一般只有几百米,在GPS高程转换过程中若是利用所有点建立统一的拟合公式于整个测区,由于线路在某个方向上伸展的范围较大,其高程异常的变化也就复杂得多,因此无论采用何种拟合算法其整体拟合的精度都不会很高。若是采用分段拟合,即先进行人为分段,把整个测区人为划分为几个区域,利用各个区域内的重合点建立拟合模型,进而计算该区域内GPS点的正常高程,显然在各区之间的接合部GPS点高程的转换只利用一侧的重合点,具有一定的缺陷,巳采用人为分区具有一定的盲肾性。因此对于定测高程的计算应采用动态的拟合模型,即无论采
用何种拟合算法都首先找出距该点最近的几个点,利用这几个点来计算拟合参数,当点位发生变化则其相当的GPS水淮重合点也发生变化,避免了人为分区的缺陷。例如当采用两个点的直线拟合模型时,任何一个点其高程转换利用的是该点两侧的GPS水准重合点,由于采用的重合点随转换点的位置而变化,因此称其为动态拟合。
从北京至上海公路山东省化马湾至临沂段GPS加密网的计算可以看出:直线及曲线模型其拟合的误差较小,而平面、曲面其精度相对要差一些,这主要是由于线性工程本身的特点所决定的。对于线性带状工程其各GPS高程点的位置往往处于一条直线上,当各点位于同一直线上时,不能建立平面、曲面等面状拟合模型。这是由于当近似于直线时,其面状拟合模型具有较大的不稳定性,即当某点位置或高程有一些微小的变化时,拟合的结果极不稳定。线性模型只顾及了纵向高程异常的变化,而没有考虑横向的变化,对带状区域其拟合高程比面状模型稳定,适用于线性带状工程的GPS高程拟乞对于面状区域则应采用平面、曲面拟合模型。从计算结果可以看出直线模型当利用的重合点增加时其拟合的精度反而降低,这悦明在整个线路采用统一的拟合模型是不合理的,而平面模型适当地增加一些重合点则有利于抑制重合点高程误差的影响,精度有所提高。
3.在定测中应用RTK技术
在线路初测时应首先建立控制网,一般应采用静态GPS定位技术建立首级控制,同时也建立了RTK作业的基准站网络,在沿线还应布设一些GPS水淮点,以利于进行高程的转化。目前的RTK技术产品一般都具有坐标放样、直线及圆曲线测设等功能,因此能够进行定线工作。
首先应在室内根据设计数据计算出各待定点的坐标,包括整桩、曲线主点、桥位等加桩,然后将这些数据送到手持机电有了坐标以后在实测前还应作坐标转换参数的计算,以便把GPS 测量结果转换到工程采用的坐标系统。有了转换参数便可在野外进行测设工作。
1997年7月8日在沈阳至山海关高速公路K350路段进行了定线测量的试验。当时该路段己进入施工阶段。具体步骤如下:
(l)计算各待定点的坐标。根据线形设计数据及待定点的里程按本节阐述的线路中线点位坐标计算的模型可计算出各整桩和加桩的设计坐标。也可用己有的成熟软件进行计算。试验时采用的坐标数据由辽宁省交通设计院提供。
(2)将测设点的坐标输入到手持机中。设计坐标数据可由一定的软件输送到手持机电也可由人工直接在手持机上进行数据输入,但人工输入工作效率较慢巳容易出错,不适合于大量点的输入。由于试验时的数据量较小,因此采用人工输入,试验结束后成功地进行了由软件传送数据的尝试。
(3)转换参数计算。首先确定采用哪些点进行转换参数的计算,这些点应具有线路坐标和WGS-84坐泳若没有WGS84坐泳则可在野外利用RTK技术实时测得。试验时采用试验路段阴近的四个线路控制点TN706、TN707、TN708、TN709进订转换参数的计算,这些点均
进行过GPS测量。在桩定线路时一般实时只考虑平面位置,可把平面和高程分开处理,平面采用平面转换的模型,后处理高程计算采用动态拟合模型。在各种RTK产品的手持机中一般都装有可进行转换参数计算的软件系统,试验时采用随机软件进行计策
(4)野外实测。野外实测时基准站可设置于视野开阔的己知控制点上,试验时基淮站设置于TN706作好GPS接收机、数据链电台及电池等的连线工作,输入参考站的坐标及其它一些设置参数后,启动基准站设备进入工作状态,数据链不断地发射校正信息,此时移动站可开始工作。移动站应从另一己知点出发,即先验证己知坐标、转换参数及参考站设置的准确性,然后测设各整桩和加桩的位置,在每次作业的最后应再次回到己知点上检查是否与己知数据相符,以保证实测数据的质量。试验时移动站从K350+550开始实测,在K350+500、K350+550上均未设置中线点,无法检校。在K350+600和K350+700上有比较淮确的水泥中线桩,实测的点位与己有点位之差均在2 cm内,精度较好。
为确定点的实际位置需要移动大线,在手持机上可给出需移动的距离或者南北向和东西向各移动多少,为在实际移动中能够准确确定移动的方位和距高应配合以手表式的指南针,也可采用一小钢卷尺为辅助工具,当与目标点在lin以内时选择两点观测,两点与目标的距高可得到,用小卷尺采用距高交会便可较淮确地定出待定点的位置,再把仪器放置上面观测,确定是否准确。
利用RTK技术进行中线定测时,线路上的里程可按一定的算法算出。即首先计算至前一整桩的直线距高土然后根据程序计算该整桩加S处点的坐标XI、YI,进而计算距离SI,SI 与S的差即为曲线长S处的弦曲差,该差作为第一次改正加到S中即可得到加桩的里程,若精度不够可再次趋近。对于横断面首先绘制其方向线,任一点的横断面与该点切线方向相垂直,因此是不难给出的,沿该方向线便可测绘横断面,避免了常规测量中曲线段横断面方向较难确定的困难,根据记录在手持计算机中的纵、横断面的数据导入道路CAD系统绘制纵横断面图,为施工数据提供资料。目觎RTK产品尚不能很好地满足中线定测工作,有待于开发用于道路的专用的软件系统。
4.结语
RTK技术是GpS定位技术的一个新的里程碑,它不仅具有GPS技术的所有优点,而巳可以实时获得观测结果及精度,大大地提高了作业效率并开拓了GPS新的应用领域。RTK技术将在道路初测、定测、施工测量、竣工测量等领域发挥巨大作用,将给现行道路勘测手段及规范带未变革,当然RTK技术的应用还有待于一些应用软件的支持。同样RTK技术也有着其局限性及进一步需要解决的问题。首先它具有GPS定位的普遍问题,如信号遮挡、多路径效应等,另外它还有通讯问题,巳目前RTK技术的价格还比较高,这些问题都会在一定程度上影响RTK技术的推广应用。
参考文献:
[1]姚连璧,朱照宏.全球定位系统(GPS)在道路与交通工程中的应用前景[J].中国公路学报,1996,9(2):47—51.
[2]张廷楷.道路路线设计[M].上海:同济大学出版社,1990.
[3]
KAHLEVD.ZurBerechnungallgemeinerTrasseninStationierungsverlauf[M].Vermessungswesenun dRaumordnung,Oktober,1992,Heft(7).348—353.
[4]姚连璧.全球定位系统(GPS)在高等级道路勘测中应用[D].上海:同济大学,1997.
RTK测量 一、RTK的技术概述: 实时动态(RTK)测量系统,是GPS 测量技术与数据传输技术的结合,是GPS 测量技术中的一个新突破。RTK测量技术是以载波相位观测量为根据的实时差分GPS 测量技术,其基本思想是:在基准站上设置1 台GPS 接收机,对所有可见GPS 卫星进行连续地观测,并将其观测数据通过无线电传输设备,实时地发送给用户观测站。在用户站上,GPS 接收机在接收GPS 卫星信号的同时,通过无线电接收设备,接收基准站传输的观测数据,然后根据相对定位原理,实时地解算整周模糊度未知数并计算显示用户站的三维坐标及其精度。通过实时计算的定位结果,便可监测基准站与用户站观测成果的质量和解算结果的收敛情况,实时地判定解算结果是否成功,从而减少冗余观测量,缩短观测时间。 RTK测量系统一般由以下三部分组成:GPS 接收设备、数据传输设备、软件系统。数据传输系统由基准站的发射电台与流动站的接收电台组成,它是实现实时动态测量的关键设备。软件系统具有能够实时解算出流动站的三维坐标的功能。 图1 RTK作业模式示意图
二、RTK日常检验与维护: RTK在日常工作中,不可避免的有损坏的可能,一般的检验步骤如下: 1、将基站架设在空旷无干扰的场地。 2、移动站开机,连接到基站,手薄显示固定解。 3、移动站架设在一个已知点上,然后校正仪器。 4、将移动站移动到另外一个已知点,测得此已知点的坐标、高程,与该点的已知坐标和高程对比,得到其误差。 5、如果误差较大,则再次校正、测量、对比,通过第二验证,误差还未达到规范要求内,证明仪器有损坏,应立即将仪器送到专业的测绘公司修理、校正,校正好以后再继续使用。 三、RTK静态测量: 1、RTK静态测量主要用于导线测量和导线复测,使用RTK进行导线测量比传统全站仪、经纬仪导线测量有以下优点: 通视要求低。全站仪等仪器在导线测量中,导线点间必须良好通视,人为误差较大等。测站距离远。RTK静态测量模式,在15 km 范围内,其定位精度可达1~2 cm。测量效率高。RTK静态测量模式时,三台仪器每站测量一点,四台仪器每站测量两点,以此类推,提高了测量效率。 2、RTK静态测量的步骤如下: ①导线点的布设。RTK导线点布设,导线点附近应无高压线、信号塔等电磁干扰。导线点间距应相等,差距不能过大。导线应连接成一个闭合的三角形,以正三角形最好,三角形最大内角不宜大于120°,不宜小于30°。 ②测量过程。A将仪器架设在已知导线点上(至少三台仪器、三个已知导线
R T K测量的步骤
RTK测量的前期步骤: ●第一步:架设基准站,把基准站的机头架设在三脚架上,然后把发射天 线、电台和电瓶连接好,打开主机电源,机头的基准站状态是红灯在中间的灯上,然后看电台的发射信号灯是否正常,查看电台的电台通道(手簿上的电台通道必须要和电台的电台通道一直才可以接收到信号达到固定解),若电台正常发射电台信号表明基准站架设完成。 ●第二步:手簿要和移动站连接,打开移动站和手簿,点开手簿蓝牙,收索 移动站串号与移动站配对(记清楚配对的com口是多少),然后打开工程之星,配置里面的com口设置和蓝牙里面的必须一样,点连接或确定连接到移动站,看是否收到电台信号(在电台信号一致的情况下),若移动站达到固定解表明移动站设置完毕 ●第三步:新建工程文件(若还是用上次的工程这不必新建,只需打开以前 的工程即可,看软件的左上方的工程名字),选择正确的坐标系(必须和设计单位的坐标系要一致),填好正确的当地工作地点的中央子午线,然后点击确定工程建立完毕。 ●第四步:做转换参数,在移动站固定解的状态下采集多个控制点坐标,然 后点”配置”里面的求转换参数,把控制点的已知坐标输入和刚刚采集的点的坐标一一对应输入手簿里面,在精度都可以的情况下,点击计算——保存——应用,找一个控制点检验一下没有问题即可开始工作。以后在同一地点工作即可打开相应的参数文件,做一个点校正即可(注意:基准站每关机一次就必须做一次点校正)。检查无误即可进行后续工作。需要特别注意的是参予计算的控制点原则上至少要用两个或两个以上的点,控制点
等级的高低和分布直接决定了四参数的控制范围。经验上四参数理想的控制范围一般都在5-7公里以内。四参数的四个基本项分别是:X平移、Y 平移、旋转角和比例。,校正参数的使用通常都是在已经使用了四参数或者七参数的基础上才使用的。(主界面——输入——求转换参数——增加——输入控制点已知坐标点名,XY高程——确定——从坐标管理库选点——坐标库中找对应采集过的控制点,选中——确定——确认,如上增加个个控制点,最后点击保存——输入文件名——Ok——应用——是) 后续的点校核(点校正或矫正向导),把移动站立在已知的控制点上,把控制点的坐标和移动站的杆高输入后点击矫正按钮——确定即可
GPS技术在公路测量中的应用前景
GPS技术在公路测量中的应用前景 1、GPS技术发展现状 全球定位系统GPS(GlobalPositioningSystem)是美国陆海空三军联合研制的卫星导航系统,具有全球性、全天侯、连续性、实时性导航定位和定时功能,能为各类用户提供精密的三维坐标、速度和时间。单点导航定位与相对测地定位是GPS应用的两个方面;对常规测量而言相对测地定位是主要的应用方式。 相对测地定位是利用L1和L2载波相位观测值实现高精度测量,其原理是采用载波相位测量局域差分法:在接收机之间求一次差,在接收机和卫星观测历元之间求二次差,通过两次差分计算解算出待定基线的长度;求解整周模糊度是其关键技术,根据算法模型,设计了静态、快速静态以及RTK等作业模式。静态作业模式主要用于地壳变形观测、国家大地测量、大坝变形观测等高精度测量;快速静态测量以其高效的作业效率与厘米级精度广泛应用于一般的工程测量;而RTK测量以其快速实时,厘米级精度等特点广泛应用于数据采集(如碎部测量)与工程放样中。RTK技术代表着GPS相对测地定位应用的主流。 GPS测地型接收设备是实现测地定位的基本条件,接收机有单
输入等中间环节,是公路勘测设计“内外业一体化”的要求,也是影响高等级公路设计技术发展的“瓶颈”所在。目前公路勘测中虽已采用电子全站仪等先进仪器设备,但常规测量方法受横向通视和作业条件的限制,作业强度大,且效率低,大大延长了设计周期。勘测技术的进步在于设备引进和技术改造,在目前的技术条件下引入GPS技术应当是首选。当前,用GPS静态或快速静态方法建立沿线总体控制测理,为勘测阶段测绘带状地形图,路线平面、纵面测量提供依据;在施工阶段为桥梁,隧道建立施工控制网,这仅仅是GPS在公路测量中应用的初级阶段,其实,公路测量的技术潜力蕴于RTK(实时动态定位)技术的应用之中,RTK技术在公路工程中的应用,有着非常广阔的前景。下面就RTK技术在公路勘测中的应用作简单的介绍。 3、RTK技术在公路测量中的应用 3.1 实时动态(RTK)定位技术简介 实时动态(RTK)定位技术是以载波相位观测值为根据的实时差分GPS(RTDGPS)技术,它是GPS测量技术发展的一个新突破,在公路工程中有广阔的应用前景。众所周知,无论静态定位,还是准动态定位等定位模式,由于数据处理滞后,所以无法实时解算出定位结果,而且也无法对观测数据进行检核,这就难以保证观测数据的质
本科学生毕业论文 GPS-RTK技术在道路横断面测量中 的应用 系部名称: 专业班级: 学生姓名: 指导教师: 职称: 二○一五年五月
摘要 本论文主要研究了全球定位系统GPS-RTK技术及南方CASS地形图成图软件和纬地公路设计软件联合用于公路断面测量的方内容,提出了利用上述硬件和软件结合进行内外业一体化的公路断面测量方法。 论文简要介绍了GPS系统的组成、主要工作特点以及在公路工程中的应用现状;论述了GPS-RTK的工作原理、外业测量的过程、以及在公路工程断面测量中应用的优势;论文介绍了南方CASS地形图成图软件地表模型的建立和等高线的绘制方法、纬地公路设计软件的线路设计和数模建立以及断面图绘制的方法。 论文通过庄盖高速公路2标段的断面测量实例,验证了文中提出的利用GPS-RTK及南方CASS软件和纬地软件相结合的一体化公路断面测量的方法,实践证明,该方法是可行的,达到了提高效率和自动化程度的目的,断面数据精度也得到了提高,为快速进行断面测量和地面土方计算提供了解决方案。论文还论述了GPS-RTK与常规水准仪相结合,解决现状测区高程拟合的问题。 关键词: GPS-RTK;公路断面测量;GPS控制网;南方CASS;纬地软件
ABSTRACT This paper is a Global Positioning System (GPS) for the measurement of the content of highway projects, the main research will be the Global Positioning System (GPS) RTK technology for the road section survey, and with latitude in the South CASS software and graphics within the industry to calculate Earthwork. An outline of the GPS system, the composition of the main features and the status of highway engineering; discusses the GPS-RTK cross-section measurement in the application of highway engineering advantages; from the basic principle of GPS positioning, detailed analysis of the GPS- RTK surveying outside the process: systematic study of latitude in the South CASS with software use. Papers with CASS and latitude to the south of software use, comprehensive study of the road GPS RTK operation mode of the characteristics of measurement and the application of GPS RTK technology road measurements (including road surface, profile, cross section) the entire process, and highlights South CASS combining with the latitude to the process of drawing cross-section and earthwork calculations. GPS RTK paper discusses the combination with conventional water level to solve specific engineering problems, CASS and the latitude of the South proposed to combine the concept drawing, saving time. Key words:GPS-RTK;Road section survey;GPS Control Network;South CASS;Hintsoft
RTK操作规程 一、基准站安装: 1、对中整平:找到控制点(也可以任意架站在未知点上),架好三脚架,安装基座,然后对中整平。 2、安装GPS基准站主机:从仪器箱中取出主机,开机,先检查主机是否是外挂基准站,如不是就先设置成外挂基准站。拧上天线连接头,把主机安装在基座上,拧紧螺丝。 (设置基准站模式:双击F1,会有“基准站”、“移动站”和“静态”语音提示,选择“基准站”,按电源键确定。) 3、连接电台:取出“主机至电台”的电缆,把电缆一头接口(电缆两端头通用)插在GPS主机上(红点对红点)。将电缆另一头接口插在电台上。 4、安装、连接电台发射天线:在基准站旁边架设一个对中杆(或者三脚架),将两根连接好的棍式天线固定在对中杆(或者三脚架)上,用天线电缆连接发射天线和电台,电台连接电源,然后电台开机。 5、量取仪器高:在互为120度的3个方向上分别量取1次仪器高,共3次,读取至毫米,取平均值。(如果基准站任意架设在未知点,则不必量取仪器高) 注意:基准站架设点必须满足以下要求:
a、高度角在15度以上开阔,无大型遮挡物; b、无电磁波干扰(200米没有微波站、雷达站、手机信号站等,50米无高压线); c、在用电台作业时,位置比较高,基准站到移动站之间最好无大型遮挡物,否则差分传播距离迅速缩短。 外挂UHF电台基准站示意图 二、基准站参数设置:
1、打开手簿软件:打开GPS手簿,选择打开手簿桌面上的【Hi-RTK道路版】软件。 2、新建项目:点击软件主界面上的【项目】,点击【新建】,输入项目名称“”,点确定。 3、设置坐标系统参数:新建项目名后,点击【项目信息】再选择【坐标系统】,在【椭球】界面里,源椭球设置为“WGS84”,当地椭球设置为“54坐标”。(根据已知控制点坐标系情况决定)
RTK测量的前期步骤: ●第一步:架设基准站,把基准站的机头架设在三脚架上,然后把发射天线、 电台和电瓶连接好,打开主机电源,机头的基准站状态是红灯在中间的灯上,然后看电台的发射信号灯是否正常,查看电台的电台通道(手簿上的电台通道必须要和电台的电台通道一直才可以接收到信号达到固定解),若电台正常发射电台信号表明基准站架设完成。 ●第二步:手簿要和移动站连接,打开移动站和手簿,点开手簿蓝牙,收索移 动站串号与移动站配对(记清楚配对的com口是多少),然后打开工程之星,配置里面的com口设置和蓝牙里面的必须一样,点连接或确定连接到移动站,看是否收到电台信号(在电台信号一致的情况下),若移动站达到固定解表明移动站设置完毕 ●第三步:新建工程文件(若还是用上次的工程这不必新建,只需打开以前的 工程即可,看软件的左上方的工程名字),选择正确的坐标系(必须和设计单位的坐标系要一致),填好正确的当地工作地点的中央子午线,然后点击确定工程建立完毕。 ●第四步:做转换参数,在移动站固定解的状态下采集多个控制点坐标,然后 点”配置”里面的求转换参数,把控制点的已知坐标输入和刚刚采集的点的坐标一一对应输入手簿里面,在精度都可以的情况下,点击计算——保存——应用,找一个控制点检验一下没有问题即可开始工作。以后在同一地点工作即可打开相应的参数文件,做一个点校正即可(注意:基准站每关机一次就必须做一次点校正)。检查无误即可进行后续工作。需要特别注意的是参予计算的控制点原则上至少要用两个或两个以上的点,控制点等级的高低和分布直接决定了四参数的控制范围。经验上四参数理想的控制范围一般都在5-7公里以内。四参数的四个基本项分别是:X平移、Y平移、旋转角和比例。,校正参数的使用通常都是在已经使用了四参数或者七参数的基础上才使用的。(主界面——输入——求转换参数——增加——输入控制点已知坐标点名,XY高程——确定——从坐标管理库选点——坐标库中找对应采集过的控制点,选中——确定——确认,如上增加个个控制点,最后点击保存——输入文件名——Ok——应用——是) ●后续的点校核(点校正或矫正向导),把移动站立在已知的控制点上,把控 制点的坐标和移动站的杆高输入后点击矫正按钮——确定即可
3.RTK技术在道路中桩放样中的应用 3.1 RTK中的道路线形设计 3.1.1 工程之星软件 本章我们以南方S370手簿为例进行RTK手簿道路线形设计。打开手簿中的工程之星软件,该软件主界面窗口分为六个主菜单栏和状态栏。菜单栏集成着所有菜单命令,内容分为六个部分:工程、输入、配置、测量、工具、关于。软件主界面窗口如图: 图6 工程之星软件 在进行道路设计时,我们主要利用“输入”菜单里的道路设计功能进行道路设计。 3.1.2 工程之星软件中的道路设计 软件中道路平面设计分为两种方式:元素模式和交点模式。如图:
图7 道路设计 1 元素法 元素法包括四种元素:点、直线、圆曲、缓曲。
图8 元素法设计界面 (1)各元素需要输入的数据 点:第一个元素必须是点,且除了第一个元素外,后面的元素均不能为点。输入点时,需要输入点的北坐标和东坐标。 直线:第二个元素必须是直线,长度可以为零,但必须输入方位角。不是第二个元素的直线,不知道方位角可以不用输入,软件会自动计算。 缓曲:缓曲只需输入缓曲长。 圆曲:圆曲需要输入半径和长度。且左偏时(转角为左转),输入半径时需要加负号。 (2)元素法输入的规则 标准的元素法输入规则是:点——直线——第一缓和曲线——圆曲线——第二缓和曲线——直线——第一缓和曲线——圆曲线——第二缓和曲线……按此规则循环依次输入。 以上是标准的输入规则,上已述及,按单元线来划分的话,有直线、圆曲线和综合曲线,如果只是圆曲线的话,就是只有直圆直,综合曲线才是直缓圆缓直。 不过实际道路设计中,还存在卵形曲线和回头曲线的特殊情况。 (3)各元素输入时的规定 ①.第一个元素必须是点,且除了第一个元素外,后面的元素均不能为点。 ②.第二个元素必须是直线,长度可以为零,但必须输入方位角。 ③.不是第二个元素的直线,不知道方位角可以不用输入,软件会自动计算。 ④.输入时建议以直线元素结束, 没有输入零直线,软件会自动增加一个零直线结束。 ⑤.卵形曲线和回头曲线,必须使用元素法。[当然卵形曲线和回头曲线属于特殊曲线,正常的道路设计,常规曲线(直缓圆缓圆直)的情况还是居多的。] ⑥.工程之星道路设计,不允许出现“圆圆”的情况。 ⑦.直曲表中,中间的“曲线间直线长”为零,即道路设计中出现零直线。 2.交点法
南方RTK在公路曲线放样中的应用(元素法) 相关资料:利用南方NTS660系列全站仪进行公路曲线测设 一、软件 南方RTK针对于公路方面,提供了单个曲线放样功能和公路线路放样功能,前者主要是为单个的(如缓和曲线)曲线,按间距计算出坐标逐一放点;而现在大多的施测单位都会将整条线路的参数输入得到线路上的点,在实际施测时,可以按点或者线路来进行放样,这样有助于在放样线上的任意一点,不必按点坐标 来进行放样,线路放样主要就是解决这个功能。 南方RTK标配软件《工程之星》中,先进行线路的设计,在进行放样。 二、操作说明 1、软件版本:20090707
2、设计线路 3、(元素法)线路参数输入规则
------------------------曲线参数如下------------------------- [点]START 17398.224,2480.221,6662.114 [距离]STRAIGHT 253.2119,84.370 [缓曲]SPIRAL 250,40 [圆曲]ARC 250,133.006 [缓曲]SPIRAL 250,30 [直线]STRAIGHT 291.5134,36.463 [缓曲]SPIRAL -200,35 [圆曲]ARC -200,136.446 [缓曲]SPIRAL -200,35 ---------------------------说明--------------------------------------------- A.选择ZD为起始点,JD20直线段的数据为:STRAIGHT 253.2119,84.370 选择ZH20为起始点,JD20直线段的数据为:STRAIGHT 253.2119,0 (此距度取较小的值) B.以后交点的直线段数据与起始点的选择无关,如JD21直线段的数据为: STRAIGHT 291.5134,36.463 C.SPIRAL 后的数据为与缓和曲线的最小半径与缓和曲线长。 交点为右偏角时,半径为正,左偏角时,半径为负。 D.ARC后的数据为圆曲线半径与圆曲线长。交点为右偏角时,半径为正,左偏角时,半径为负,各元素的排列顺序应与路线曲线的实际顺序相同,对没有缓和曲线的交点就不输入SPIRAL行数据。 特别注意: A.以点开始
rtk道路测量的实习心得 鉴于这次的实习,对RTK实时动态定位技术有了一定的了解。实习过程中有各种困难。以下内容是品才网小编为您精心整理的rtk道路测量的实习心得,欢迎参考! rtk道路测量的实习心得一:实习目的 正确认识和理解RTK定位技术,学会并掌握RTK在工程上的放样过程。 RTK定位技术是基于载波相位观测值的实时动态定位技术,它能够实时地提供测站点在指定坐标系中的三维定位结果,并达到厘米级精度。在RTK作业模式下,基准站通过数据链将其观测值和测站坐标信息一起传送给流动站。流动站不仅通过数据链接收来自基准站的数据,还要采集GPS观测数据,并在系统内组成差分观测值进行实时处理。流动站可处于静止状态,也可处于运动状态。RTK技术的关键在于数据处理技术和数据传输技术。 RTK 系统正常工作要具备以下三个条件:第一,基准站和移动站同时接收到5颗以上GPS卫星信号;第二,基准站和移动站同时接收到卫星信号和基准站发出的差分信号;第三,基准站和移动站要连续接收 GPS 卫星信号和基准站发出的差分信号。即移动站迁站过程中不能关机,不能失锁。否则RTK须重新初始化。 二:实习组织及时间安排 XX年2月25日至XX年3月15日
三:实习任务 1、了解和掌握RTK的基本原理和作业模式。 2、利用RTK进行点的放样。 3、了解RTK的优点和局限性。 1)启动基准站。将基准站架设在上空开阔、没有强电磁干扰、多路径误差影响小的控制点上,正确连接好各仪器电缆,打开各仪器。将基准站设置为动态测量模式。 2)建立新工程,定义坐标系统新建一个工程,即新建一个文件夹,并在这个文件夹里设置好测量参数。这个文件夹中包括许多小文件,它们分别是测量的成果文件和各种参数设置文件,如*.dat、*.cot、*.rtk、*.ini等。 3)点校正 CPS 测量的为 WCS -84 系坐标,而我们通常需要的是在流动站上实时显示国家坐标系或地力独立坐标系下的坐标,这需要进行坐标系之间的转换,即点校正。点校正可以通过两种方式进行。A、在已知转换参数的情况下。如果有当地坐标系统与 WCS-84 坐标系统的转换七参数,则可以在测量控制器中直接输入,建立坐标转换关系。如果上作是在国家大地坐标系统下进行,而且知道椭球参数和投影方式以及基准点坐标,则可以直接定义坐标系统,建议在RTK 测量中最好加入 1-2 个点校正,避免投影变形过大,提高数据可靠性。B、在不知道转换参数的情况下。如果在局域坐标系统中工作或任何坐标系统进行测量和放样工作,