移动机器人的关键技术分为以下三种: (1)导航技术 导航技术是移动机器人的一项核心技术之一[3,4]"它是指移动机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动"目前,移动机器人主要的导航方式包括:磁导航,惯性导航,视觉导航等"其中,视觉导航15一7]通过摄像头对障碍物和路标信息拍摄,获取图像信息,然后对图像信息进行探测和识别实现导航"它具有信号探测范围广,获取信息完整等优点,是移动机器人导航的一个主要发展方向,而基于非结构化环境视觉导航是移动机器人导航的研究重点。 (2)多传感器信息融合技术多传感器信息融合技术是移动机器人的关键技术之一,其研究始于20世纪80年代18,9]"信息融合是指将多个传感器所提供的环境信息进行集成处理,形成对外部环境的统一表示"它融合了信息的互补性,信息的冗余性,信息的实时性和信息的低成本性"因而能比较完整地,精确地反映环境特征,从而做出正确的判断和决策,保证了机器人系统快速性,准确性和稳定性"目前移动机器人的多传感器融合技术的研究方法主要有:加权平均法,卡尔曼滤波,贝叶斯估计,D-S证据理论推理,产生规则,模糊逻辑,人工神经网络等"例如文献[10]介绍了名为Xavier的机器人,在机器人上装有多种传感器,如激光探测器!声纳、车轮编码器和彩色摄像机等,该机器人具有很高的自主导航能力。 (3)机器人控制器作为机器人的核心部分,机器人控制器是影响机器人性能的关键部分之一"目前,国内外机器人小车的控制系统的核心处理器,己经由MCS-51、80C196等8位、16位微控制器为主,逐渐演变为DSP、高性能32位微控制器为核心构成"由于模块化系统具有良好的前景,开发具有开放式结构的模块化、标准化机器人控制器也成为当前机器人控制器的一个研究热点"近几年,日本!美国和欧洲一些国家都在开发具有开放式结构的机器人控制器,如日本安川公司基于PC开发的具有开放式结构!网络功能的机器人控制器"我国863计划智能机器人主题也已对这方面的研究立项 视觉导航技术分类 机器人视觉被认为是机器人重要的感觉能力,机器人视觉系统正如人的眼睛一样,是机器人感知局部环境的重要“器官”,同时依此感知的环境信息实现对机器人的导航。机器人视觉信息主要指二维彩色CCD摄像机信息,在有些系统中还包括三维激光雷达采集的信息。视觉信息能否正确、实时地处理直接关系到机器人行驶速度、路径跟踪以及对障碍物的避碰,对系统的实时性和鲁棒性具有决定性的作用。视觉信息处理技术是移动机器人研究中最为关键的技术之一。
无线传感器网络的特点 大规模网络 为了获取精确信息,在监测区域通常部署大量传感器节点,传感器节点数量可能达到成千上万,甚至更多。传感器网络的大规模性包括两方面的含义:一方面是传感器节点分布在很大的地理区域内,如在原始大森林采用传感器网络进行森林防火和环境监测,需要部署大量的传感器节点;另一方面,传感器节点部署很密集,在一个面积不是很大的空间内,密集部署了大量的传感器节点。 传感器网络的大规模性具有如下优点:通过不同空间视角获得的信息具有更大的信噪比;通过分布式处理大量的采集信息能够提高监测的精确度,降低对单个节点传感器的精度要求;大量冗余节点的存在,使得系统具有很强的容错性能;大量节点能够增大覆盖的监测区域,减少洞穴或者盲区。 自组织网络在 传感器网络应用中,通常情况下传感器节点被放置在没有基础结构的地方。传感器节点的位置不能预先精确设定,节点之间的相互邻居关系预先也不知道,如通过飞机播撒大量传感器节点到面积广阔的原始森林中,或随意放置到人不可到达或危险的区域。这样就要求传感器节点具有自组织的能力,能够自动进行配置和管理,通过拓扑控制机制和网络协议自动形成转发监测数据的多跳无线网络系统。在传
感器网络使用过程中,部分传感器节点由于能量耗尽或环境因素造成失效,也有一些节点为了弥补失效节点、增加监测精度而补充到网络中,这样在传感器网络中的节点个数就动态地增加或减少,
从而使网络的拓扑结构随之动态地变化。传感器网络的自组织性要能够适应这种网络拓扑结构的动态变化。动态性网络传感器网络的拓扑结构可能因为下列因素而改变:①环境因素或电能耗尽造成的传感器节点出现故障或失效;②环境条件变化可能造成无线通信链路带宽变化,甚至时断时通;③传感器网络的传感器、感知对象和观察者这三要素都可能具有移动性;④新节点的加入。这就要求传感器网络系统要能够适应这种变化,具有动态的系统可重构性。 可靠的网络 传感器网络特别适合部署在恶劣环境或人类不宜到达的区域,传感器节点可能工作在露天环境中,遭受太阳的暴晒或风吹雨淋,甚至遭到无关人员或动物的破坏。传感器节点往往采用随机部署,如通过飞机撒播或发射炮弹到指定区域进行部署。这些都要求传感器节点非常坚固,不易损坏,适应各种恶劣环境条件。由于监测区域环境的限制以及传感器节点数目巨大,不可能人工“照顾每个传感器节点,网络的维护十分困难甚至不可维护。传感器网络的通信保密性和安全性也十分重要,要防止监测数据被盗取和获取伪造的监测信息。因此,传感器网络的软硬件必须具有鲁棒性和容错性。
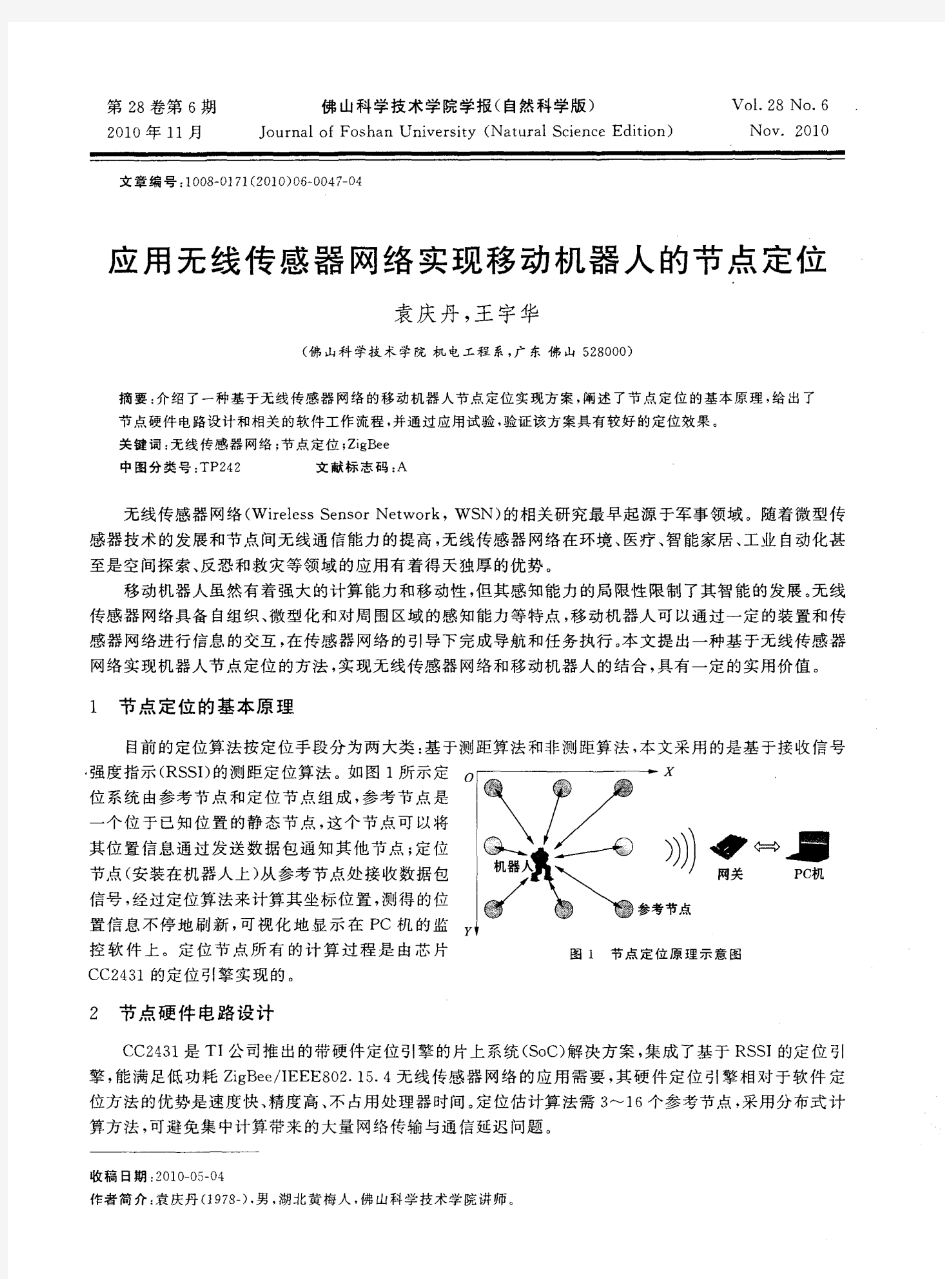
无线传感器网络面临的安全隐患及安全定位机制 随着通信技术的发展,安全问题显得越来越重要。在现实生活中,有线网络已经深入到千家万户:互联网、有线电视网络、有线电话网络等与人们生活的联系越来越紧密,已经成为必不可少的一部分,有线网络的安全问题已经能够得到有效的解决。在日常生活中,人们可以放心的使用这些网络,利用它来更好的生活和学习。然而随着无线通信技术的不断发展,无线网络在日常生活中已占据重要的地位,如无线LAN技术、3G技术、4G技术等,同时也有许多新兴的无线网络技术如无线传感器网络, Ad-hoc 等有待进一步发展。随着人们对无线通信的依赖越来越强烈,无线通信的安全问题也面临着重要的考验。本章首先介绍普通网络安全定位研究方法,随后介绍无线传感器网络存在的安全隐患以及常见的网络攻击模型,分析比较这些攻击模型对定位的影响,最后介绍已有的一些安全定位算法,为后续章节的相关研究工作打下基础。 3.1 安全定位研究方法 不同的定位算法会面临着不同的安全方面的问题,安全定位的研究方法可以 采用图 3-1 所示的流程来进行。
图3-1安全定位方法研究流程图 Figure 3-1 Flowchart of security positi oning research method 在研究中首先要找出针对不同定位算法的攻击模型,分析这些攻击对定位精 度所造成的影响,然后从两方面入手来解决这个安全问题或隐患:一方面改进定 位算法使得该定位算法不易受到来自外界的攻击,另一方面可以设计进行攻击检 测判断及剔除掉受到攻击的节点的安全定位算法或者把已有的安全算法进行改进使之能够应用于无线传感器网络定位,还可以从理论上建立安全定位算法的数学模型,分析各种参数对系统性能的影响,最后根据这个数学模型对算法进行仿真,并把仿真结果作为反馈信息,对安全定位算法进一步优化和改进,直到达到最优为止。 3.2安全隐患 由于无线传感器网络随机部署、网络拓扑易变、自组织成网络和无线链路等特点,使其面临着更为严峻的安全隐患。在传感器网络不同的定位算法中具有不同的定位思想,所面临的安全问题也不尽相同。攻击者会利用定位技术的弱点设计不同的攻击手段,因此了解各定位系统自身存在的安全隐患和常见的攻击模型对安全定位至
无线传感器网络的应用与影响因素分析 摘要:无线传感器网络在信息传输、采集、处理方面的能力非常强。最初,由于军事方面的需要,无线传感网络不断发展,传感器网络技术不断进步,其应用的范围也日益广泛,已从军事防御领域扩展以及普及到社会生活的各个方面。本文全面描述了无线传感器网络的发展过程、研究领域的现状和影响传感器应用的若干因素。关键词:无线传感器网络;传感器节点;限制因素 applications of wireless sensor networks and influencing factors analysis liu peng (college of computer science,yangtze university,jingzhou434023,china) abstract:wireless sensor networks in the transmission of informa- tion,collecting,processing capacity is very strong.initially,due to the needs of the military aspects of wireless sensor networks,the continuous development of sensor network technology continues to progress its increasingly wide range of applications,from military defense field to expand and spread to various aspects of social life.a comprehensive description of the development
第36卷 增刊Ⅰ2008年 10月 华 中 科 技 大 学 学 报(自然科学版) J.Huazhong Univ.of Sci.&Tech.(Natural Science Edition )Vol.36Sup.Ⅰ Oct. 2008 收稿日期:2008207215. 作者简介:郝志凯(19832),男,博士研究生,E 2mail :zk -hao @https://www.doczj.com/doc/e53885715.html,. 基金项目:国家高技术研究发展计划资助项目(2006AA11Z225);国家自然科学基金资助项目(60635010, 60605026). 无线传感器网络定位方法综述 郝志凯 王 硕 (中国科学院自动化研究所复杂系统与智能科学实验室,北京100190) 摘要:介绍了国内外研究机构在无线传感器网络定位方法方面开展的研究工作,并对这些研究工作进行了归纳和总结.定位的基本方法分为距离式定位和非距离式定位.距离式定位是通过测量距离或角度进行位置估计,测量数据的精度对定位精度有很大影响.非距离式定位是通过节点间的hop 数或估计距离计算节点的坐标,这种方法不需要测量距离或角度,利用估计距离代替真实距离,算法简单但精度不高.无线传感器网络中定位方法的应用需要针对不同的应用场合,综合考虑节点的规模、成本及系统对定位精度等要求来进行设计和选择. 关 键 词:无线传感器网络;定位方法;距离式定位;非距离式定位;相对定位 中图分类号:TN919.2;TP732 文献标识码:A 文章编号:167124512(2008)S120224204 Survey on localization algorithms for wireless sensor net w orks H ao Zhi k ai W ang S huo (Laboratory of Complex Systems and Intelligence Science ,Institute of Automation , Chinese Academy of Sciences ,Beijing 100190) Abstract :Current researches in wireless sensor networks (WSNs ′ )localization algorit hms are int ro 2duced ,and t hese researches are analyzed and concluded.The p recision of t he nodes ′locations are im 2portant for t he data ′s effectiveness in WSNs ′.The localization algorit hms are divided into range 2based and range 2free.Range 2based algorit hms use t he measured distance and angle to calculate t he nodes ′coordinates.However ,t he range 2f ree researches use hop s or evaluated distance to localization ,which are simple but low 2precision.In different occasions ,t he algorit hm should be taken account in t he net 2work ′s size ,co st ,p recision and so on. K ey w ords :wireless sensor networks (WSNs ′ );localization ;range 2based ;range 2f ree ;relative po sitio 2ning 目前广泛使用的全球卫星导航定位系统GPS 可用来确定携带者的绝对位置,但不适合在 无线传感器网络中大量使用.主要有以下原因[1]:a .成本高.无线传感器网络中的节点数量多、分 布密集,如果各节点都配备GPS 接收器成本很高;b .能源限制.网络中的节点通常是通过内部电池进行供电,由于其工作环境有时在森林、山地等人迹罕至的地方,对其进行电源更换困难;c .工作环境限制.节点有时会分布在室内等电磁 波较难到达的环境中,这种工作环境下GPS 无法完成定位任务;d .尺寸较大.由于上述种种原因使得GPS 不能广泛用在无线传感器网络系统的节点上,这就需要发展适合于无线传感器网络应用的节点定位方法. 鉴于无线传感器网络节点在能耗、计算能力、通信能力等方面的限制,其节点的定位方法应该具有分布式、低复杂性、精度较高、通用性较好等特点,国内外的研究机构已开展了大量工作[2~9].
机器人上用的传感器的介绍 作者:Ricky 文章来源:https://www.doczj.com/doc/e53885715.html,更新时间:2006年05月20日打印此文浏览数:18549 感知系统是机器人能够实现自主化的必须部分。这一章,将介绍一下移动机器人中所采用的传感器以及如何从传感器系统中采集所需要的信号。 根据传感器的作用分,一般传感器分为: 内部传感器(体内传感器):主要测量机器人内部系统,比如温度,电机速度,电机载荷,电池电压等。 外部传感器(外界传感器):主要测量外界环境,比如距离测量,声音,光线。 根据传感器的运行方式,可以分为: 被动式传感器:传感器本身不发出能量,比如CCD,CMOS摄像头传感器,靠捕获外界光线来获得信息。 主动式传感器:传感器会发出探测信号。比如超声波,红外,激光。但是此类传感器的反射信号会受到很多物质的影响,从而影响准确的信号获得。同时,信号还狠容易受到干扰,比如相邻两个机器人都发出超声波,这些信号就会产生干扰。 传感器一般有以下几个指标: 动态范围:是指传感器能检测的范围。比如电流传感器能够测量1mA-20A的电流,那么这个传感器的测量范围就是10log(20/0.001)=43dB. 如果传感器的输入超出了传感器的测量范围,那么传感器就不会显示正确的测量值了。比如超声波传感器对近距离的物体无法测量。 分辨率:分辨率是指传感器能测量的最小差异。比如电流传感器,它的分辨率可能是5mA,也就是说小于5mA的电流差异,它没法检测出。当然越高分辨率的传感器价格就越贵。 线性度:这是一个非常重要的指标来衡量传感器输入和输出的关系。 频率:是指传感器的采样速度。比如一个超声波传感器的采样速度为20HZ,也就是说每秒钟能扫描20次。 下面介绍一下常用的传感器: 编码器:主要用于测量电机的旋转角度和速度。任何用电机的地方,都可以用编码器来作为传感器来获得电机的输出。
1武警部队监控平台架构介绍与设计 1.1监控系统的系统结构 基站监控系统的结构组成如上图所示,主要由三个大的部分构成,分别是监控中心、监控站点、监控单元。整个系统从资金、功能以及方便维护性出发,我们采用了干点加节点方式的监控方法。 监控中心(SC):SC的定义是指整个系统的中心枢纽点,控制整个分监控站,主要的功能是起管理作用和数据处理作用。一般只在市级包括(地、州)设置相应的监控中心,位置一般在武警部队的交换中心机房内或者指挥中心大楼内。 区域监控中心(SS):又称分点监控站,主要是分散在各个更低等级的区县,主要功能是监控自己所负责辖区的所有基站。对于固话网络,区域监控中心的管辖范围为一个县/区;移动通信网络由于其组网不同于固话本地网,则相对弱化了这一级。区域监控中心SS的机房内的设备配置与SC的差不多,但是不同的是功能不同以及SS的等级低于SC,SS的功能主要是维护设备和监控。 监控单元(SU):是整个监控系统中等级最低的单元了,它的功能就是监控并且起供电,传输等等作用,主要由SM和其他供电设备由若干监控模块、辅助设备构成。SU侧集成有无线传感网络微设备,比如定位设备或者光感,温感设备等等。 监控模块(SM):SM是监控单元的组成部分之一,主要作用监控信息的采集功能以及传输,提供相应的通信接口,完成相关信息的上传于接收。
2监控系统的分级管理结构及监控中心功能 基站监控系统的组网分级如果从管理上来看,主要采用两级结构:CSC集中监控中心和现场监控单元。CSC主要设置在运营商的枢纽大楼,主要功能为数据处理,管理远程监控单元,对告警信息进行分类统计,可实现告警查询和存储的功能。一般管理员可以在CSC实现中心调度的功能,并将告警信息进行分发。而FSU一般针对具体的某一个基站,具体作用于如何采集数据参数并进行传输。CSC集中监控中心的需要对FSU采集的数据参数进行报表统计和分析,自动生产图表并为我们的客户提供直观,方便的可视化操作,为维护工作提供依据,维护管理者可以根据大量的分析数据和报表进行快速反应,以最快的速度发现网络的故障点和优先处理点,将人力资源使用在刀刃上。监控中心CSC系统的功能中,还有维护管理类,具体描述如下: 1)实时报警功能 该系统的报警功能是指发现机房里的各种故障后,通过声音,短信,主界面显示的方式及时的上报给操作者。当机房内的动力环境,空调,烟感,人体红外等等发生变量后,这些数据通过基站监控终端上传到BTS再到BSC。最后由数据库进行分类整理后存储到SQLSEVRER2000中。下面介绍主要的几种报警方式: 2)声音报警 基站发生告警后,系统采集后,会用声卡对不一样的告警类别发出对应的语音提示。比如:声音的设置有几种,主要是以鸣叫的长短来区分的。为便于引起现场维护人员的重视紧急告警可设置为长鸣,不重要的告警故障设置为短鸣。这样一来可以用声音区分故障的等级,比方某地市的中心交换机房内相关告警声音设置,它的开关电源柜当平均电流达到40AH的时候,提示声音设置为长鸣,并立即发生短信告警工单。如果在夜晚机房无人值守的情况下:
摘要 无线传感器网络(WSN,Wireless Sensor Network)是近年来迅速发展并受到普遍重视的新型网络技术,它的出现和发展给人类的生活和生产的各个领域带来了深远的影响。无线传感器网络节点定位技术是无线传感器网络应用研究的基础。目前,已有多种定位技术被应用于室内定位中,尤其是基于接收信号强度(RSSI,Received Signal Strength Indication)的定位技术以其低功耗、低成本、易于实现等优点,得到了无线传感器网络研究学者们的青睐。 本文重点研究了基于RSSI的室内定位的关键技术,主要包括定位模型分析和定位算法设计。首先,为了获得较为精确的定位,根据RSSI测距原理和无线信号传播衰减模型在设定的室内环境进行多次实验,通过计算及均值处理等方法反复调整以获得标准的定位模型参数,得到高精度的等效距离。接着,根据三边定位算法原理简化定位算法,建立更为简单的定位模型,采用双边定位得到两个可能的定位点,再利用RSSI测距原理对两个定位点进行择优选择确定定位点。最后,在Arduino开发平台上对参考节点与未知节点这两类iDuino节点的室内定位模型进行了软件开发设计和程序开发。在设定的室内环境部署iDuino节点,搭建实验定位模型,并实现了定位。 关键词:无线传感器网络,节点,室内定位,RSSI,Arduino
ABSTRACT Wireless sensor network (WSN) is developed rapidly and universally emphasized as a new network technology in recent years, the advent and development of WSN have had a profound and lasting impact on the life and all areas of production of human beings. Wireless nodes localization technology is the basis in the application and studies of wireless sensor network. There are a variety of positioning technology have been used in indoor location at present, especially the based on RSSI (received signal strength) positioning technology gets a great preference from many scholars of studies of wireless sensor network with the advantages of low power consumption, low cost and easy to realize. This paper mainly studies the key technology of indoor positioning based on RSSI, which mainly includes the positioning model analysis and positioning algorithm design. First, in order to obtain more accurate positioning, we perform several experiments according to the RSSI ranging principle and wireless signal propagation attenuation model in the setting of indoor environment, and get accurate positioning model parameters and equivalent distance by the methods of calculation and mean processing. Then, we simplify Trilateral Localization Algorithm to Bilateral Location Algorithm and establish a simpler positioning model, with which we can get two nodes of possible location, and determine the better node according to the RSSI ranging principle. At last, we make software designing and programming of these nodes that are anchor nodes and nodes of unknown on the Arduino development platform. Combined with the indoor environment we selected, we deploy the iDuino nodes and then build location model, with which we implement the location. KEY WORDS:Wireless Sensor Network,Nodes,Indoor Location,RSSI,Arduino
对于定位一般的理解就是确定位置。在无线传感网中,定位是指网络通过特 定的方法确定节点的位置信息。其可分为节点的自身定位和目标定位。节点自 身定位是确定网络中节点位置坐标的过程,它是网络自身属性的确定过程,是网络 的支撑,可以通过人工配置或各种节点自定位算法完成; 目标定位是指在网络覆 盖范围内确定一个事件或一个目标的位置坐标,这可以通过把位置已知的网络节 点作为参考节点来确定事件或目标在网络中所处的位置。无线传感网定位问题 就是寻求利用少量的锚节点来确定网络中未知节点的位置坐标的方法。 无线传感网中,传感器节点的可靠性差、能量有限、节点数量庞大且节点部 署具有不确定性等,这些限制因素对定位技术提出了更高的要求。通常无线传感 网定位技术具备以下特点: ① 自组织性 通常无线传感网中的节点是随机布设的,不能依靠全局的基础设施的协助确定每 个节点的位置所在。因此,自组织性就显得格外重要。 ② 容错性 传感器节点的硬件配置低、处理能力弱、可靠性差、能量少以及测距时会产生 误差等因素决定了传感器节点本身的脆弱性,因此定位算法必须具有良好的容错 性。 ③ 能量高效性 为了尽量延长网络的生存周期,要尽可能的减少节点间的通信开销,减少算法中计 算的复杂度,用尽量少的能量完成尽可能多的工作。 ④ 分布式计算 每个节点自己对自身的位置进行估算,不需要将所有信息传送到某个特定的节点 进行集中计算。 、管路敷设技术通过管线不仅可以解决吊顶层配置不规范高中资料试卷问题,而且可保障各类管路习题到位。在管路敷设过程中,要加强看护关于管路高中资料试卷连接管口处理高中资料试卷弯扁度固定盒位置保护层防腐跨接地线弯曲半径标等,要求技术交底。管线敷设技术中包含线槽、管架等多项方式,为解决高中语文电气课件中管壁薄、接口不严等问题,合理利用管线敷设技术。线缆敷设原则:在分线盒处,当不同电压回路交叉时,应采用金属隔板进行隔开处理;同一线槽内强电回路须同时切断习题电源,线缆敷设完毕,要进行检查和检测处理。、电气课件中调试对全部高中资料试卷电气设备,在安装过程中以及安装结束后进行 高中资料试卷调整试验;通电检查所有设备高中资料试卷相互作用与相互关系,根据生产工艺高中资料试卷要求,对电气设备进行空载与带负荷下高中资料试卷调控试验;对设备进行调整使其在正常工况下与过度工作下都可以正常工作;对于继电保护进行整核对定值,审核与校对图纸,编写复杂设备与装置高中资料试卷调试方案,编写重要设备高中资料试卷试验方案以及系统启动方案;对整套启动过程中高中资料试卷电气设备进行调试工作并且进行过关运行高中资料试卷技术指导。对于调试过程中高中资料试卷技术问题,作为调试人员,需要在事前掌握图纸资料、设备制造厂家出具高中资料试卷试验报告与相关技术资料,并且了解现场设备高中资料试卷布置情况与有关高中资料试卷电气系统接线等情况 ,然后根据规范与规程规定,制定设备调试高中资料试卷方案。 、电气设备调试高中资料试卷技术电力保护装置调试技术,电力保护高中资料试卷配置技术是指机组在进行继电保护高中资料试卷总体配置时,需要在最大限度内来确保机组高中资料试卷安全,并且尽可能地缩小故障高中资料试卷破坏范围,或者对某些异常高中资料试卷工况进行自动处理,尤其要避免错误高中资料试卷保护装置动作,并且拒绝动作,来避免不必要高中资料试卷突然停机。因此,电力高中资料试卷保护装置调试技术,要求电力保护装置做到准确灵活。对于差动保护装置高中资料试卷调试技术是指发电机一变压器组在发生内部故障时,需要进行外部电源高中资料试卷切除从而采用高中资料试卷主要保护装置。
机器人最实用的10种传感器盘点 随着智能化的程度提高,机器人传感器应用越来越多。智能机器人主要有交互机器人、传感机器人和自主机器人3种。从拟人功能出发,视觉、力觉、触觉最为重要,早已进入实用阶段,听觉也有较大进展,其它还有嗅觉、味觉、滑觉等,对应有多种传感器,所以机器人传感产业也形成了生产和科研力量。 内传感器 机器介机电一体化的产品,内传感器和电机、轴等机械部件或机械结构如手臂(Arm)、手腕(Wrist)等安装在一起,完成位置、速度、力度的测量,实现伺服控制。 位置(位移)传感器 直线移动传感器有电位计式传感器和可调变压器两种。角位移传感器有电位计式、可调变压器(旋转变压器)及光电编码器三种,其中光电编码器有增量式编码器和绝对式编码器。增量式编码器一般用于零位不确定的位置伺服控制,绝对式编码器能够得到对应于编码器初始锁定位置的驱动轴瞬时角度值,当设备受到压力时,只要读出每个关节编码器的读数,就能够对伺服控制的给定值进行调整,以防止机器人启动时产生过剧烈的运动。 速度和加速度传感器 速度传感器有测量平移和旋转运动速度两种,但大多数情况下,只限于测量旋转速度。利用位移的导数,特别是光电方法让光照射旋转圆盘,检测出旋转频率和脉冲数目,以求出旋转角度,及利用圆盘制成有缝隙,通过二个光电二极管辨别出角速度,即转速,这就是光电脉冲式转速传感器。此外还有测速发电机用于测速等。 应变仪即伸缩测量仪,也是一种应力传感器,用于加速度测量。加速度传感器用于测量工业机器人的动态控制信号。一般有由速度测量进行推演、已知质量物体加速度所产生动力,即应用应变仪测量此力进行推演,还有就是下面所说的方法: 与被测加速度有关的力可由一个已知质量产生。这种力可以为电磁力或电动力,最终简化为对电流的测量,这就是伺服返回传感器,实际又能有多种振动式加速度传感器。
《无线传感器网络及应用》第一次作业答案 一、单项选择题。本大题共11个小题,每小题2.5 分,共27.5分。在每小题给出的选项中,只有一项是符合题目要求的。 1.下面哪种协议不属于路由协议( C )。 A.地理位置路由协议 B.能量感知路由协议 C.基于跳数的路由协议 D.可靠的路由协议 2.ZigBee的通信速率在2.4GHz时为( D )。 A.40Kbps B.20Kbps C.256 Kbps D.250kbps 3.传感器节点( D )范围以内的所有其它节点,称为该节点的邻居节点。 A.视线 B.跳数 C.网络 D.通信半径 4.TinyOS是一个开源的( D )操作系统,它是由加州大学的伯利克分校开发, 主要应用于无线传感器网络方面。 A.桌面 B.后台 C.批处理 D.嵌入式 https://www.doczj.com/doc/e53885715.html,N技术使用了哪种介质( A )。 A.无线电波 B.双绞线 C.光波 D.沙狼 6.传感器节点消耗能量主要消耗在( A )上。 A.无线通信模块 B.处理器模块 C.传感器模块 D.管理模块 7.传感器最早起于二十世纪( B )年代。 A.60年代 B.70年代 C.80年代 D.90年代 8.定向扩散(Directed Diffusion,DD)路由协议是一种( B )机制。 A.能量感知路 B.基于查询的路由
C.地理位置路由 D.可靠的路由 9.传感器的灵敏度是有方向性的。当被测量是单向量,而且对方向性要求较高时,应 选择在其它方向上灵敏度()的传感器;如果被测量是多维向量,则要求传感器的交叉灵敏度越()越好。 A A.小;小 B.小;大 C.高;高 D.高;底 10.传感器的频率响应越(),则可测的信号频率范围就越()。C A.小;高 B.大;宽 C.高;宽 D.大;高 11.传感器的线形范围是指输出与输入成正比的范围。理论上在此范围内,灵敏度保持 定值。传感器的线性范围越(),则它的量程就越(),并且能保证一定的测量精度。D A.小;宽 B.小;高 C.高;大 D.宽;大 二、多项选择题。本大题共29个小题,每小题2.5 分,共72.5分。在每小题给出的选项中,有一项或多项是符合题目要求的。 1.根据节点数目的多少,传感器网络的结构可以分为(AD)。 A.平面结构 B.网络结构 C.星形结构 D.分级结构 2.传感器节点消耗能量的模块包括(ACD)。 A.传感器模块 B.存储模块 C.处理器模块 D.无线通信模块 3.下面哪些属于数据融合的方法(ABD)。 A.模糊逻辑法 B.神经网络方法 C.优选法 D.综合平均法 4.目前人们采用的节能策略主要有(AC)。 A.休眠机制 B.定时发送机制 C.数据融合机制
详解无线传感器网络定位技
详解无线传感器网络定位技术 1 引言 无线传感器网络作为一种全新的信息获取和处理技术在目标跟踪、入侵监测及一些定位相关领域有广泛的应用前景。然而,无论是在军事侦察或地理环境监测,还是交通路况监测或医疗卫生中对病人的跟踪等应用场合,很多获取的监测信息需要附带相应的位置信息,否则,这些数据就是不确切的,甚至有时候会失去采集的意义,因此网络中传感器节点自身位置信息的获取是大多数应用的基础。首先,传感器节点必须明确自身位置才能详细说明“在什么位置发什么了什么事件”,从而实现对外部目标的定位和跟踪;其次,了解传感器节点的位置分布状况可以对提高网络的路由效率提供帮助,从而实现网络的负载均衡以及网络拓扑的自动配置,改善整个网络的覆盖质量。因此,必须采取一定的机制或算法来实现无线传感器网络中各节点的定位。 无线传感器网络定位最简单的方法是为每个节点装载全球卫星定位系统(GPS)接收器,用以确定节点位置。但是,由于经济因素、节点能量制约和GPS 对于部署环境有一定要求等条件的限制,导致方案的可行性较差。因此,一般只有少量节点通过装载GPS 或通过预先部署在特定位置的方式获取自身坐标。另外,无线传感器网络的节点定位涉及很多方面的内容,包括定位精度、网络规模、锚节点密度、网络的容错性和鲁棒性以及功耗等,如何平衡各种关系对于无线传感器网络的定位问题非常具有挑战性。可以说无线传感器网络节点自身定位问题在很大程度上决定着其应用前景。因此,研究节点定位问题不仅必要,而且具有很重要的现实意义。 2 WSN 定位技术基本概念 2.1 定位方法的相关术语 1)锚节点(anchors):也称为信标节点、灯塔节点等,可通过某种手段自主获取自身位置的节点; 2)普通节点(normal nodes):也称为未知节点或待定位节点,预先不知道自身位置,需使用锚节点的位置信息并运用一定的算法得到估计位置的节点; 3)邻居节点(neighbor nodes):传感器节点通信半径以内的其他节点; 4)跳数(hop count):两节点间的跳段总数; 5)跳段距离(hop distance):两节点之间的每一跳距离之和;
基于系统集成技术的节点类型和特点 在节点的功能设计和实现方面,目前常用的节点均为采用分立元器件的系统集成技术。已出现的多种节点的设计和平台套件,在体系结构上有相似性,主要区别在于采用了不同的微处理器,如AVR系列和MSP430系列等;或者采用了不同的射频芯片或通信协议,比如采用自定义协议、802.11协议、ZigBee[1]协议、蓝牙协议以及UWB通信方式等。典型的节点包括Berkeley Motes [2,3], Sensoria WINS[4], MIT μAMPs [5], Intel iMote [6], Intel XScale nodes [7], CSRIO研究室的CSRIO节点[8]、Tmote [9]、ShockFish公司的TinyNode[10]、耶鲁大学的XYZ节点[11] 、smart-its BTNodes[12]等。国内也出现诸多研究开发平台套件,包括中科院计算所的EASI系列[13-14],中科院软件所、清华大学、中科大、哈工大、大连海事大学等单位也都已经开发出了节点平台支持网络研究和应用开发。 这些由不同公司以及研究机构研制的无线节点在硬件结构上基本相同,包括处理器单元、存储器单元、射频单元,扩展接口单元、传感器以及电源模块。其中,核心部分为处理器模块以及射频通信模块。处理器决定了节点的数据处理能力和运行速度等,射频通信模块决定了节点的工作频率和无线传输距离,它们的选型能在很大程度上影响节点的功能、整体能耗和工作寿命。 目前问世的传感节点(负责通过传感器采集数据的节点)大多使用如下几种处理器:ATMEL公司AVR系列的ATMega128L处理器,TI公司生产的MSP430系列处理器,而汇聚节点(负责会聚数据的节点)则采用了功能强大的ARM处理器、8051内核处理器、ML67Q500x系列或PXA270处理器。这些处理器的性能综合比较见表1。 表1、无线传感器网络节点中采用的处理器性能比较
1.从无线联网的角度来看,传感器网络结点的体系由分层的网络通信协 议、 、 三部分组成。 2. 传感器一般由__________、敏感元件、__________组成。 3.传感器网络的无效能量主要来源于_________、串扰、_________和控制开销。 4. 根据数据进行融合操作前后的信息含量,可以将数据融合分为 、 两类。 5. 通常计算机网络的研究与设计方法包括 、实验方法和、 。 二、单项选择题(每题2分,共20分) 1.谣传路由协议属于( )。 A. 能量感知路由协议 B. 基于查询的路由协议 C. 地理位置路由协议 D. 可靠的路由协议 2.下列哪一种类型的帧不属于IEEE802.15.4网络定义的帧( )。 A. 信标帧 B. MAC 命令帧 C. 数据帧 D. 超帧 3.下列定位算法中,距离无关的定位算法有( )。 A.APIT 算法 B. TOA 算法 C. RSSI 算法 D. AOA 定位算法 4.下列不属于传感器数据处理模块设计时需考虑的是( )。 A 、节能设计 B 、小体积 C 、高速率 D 、低成本 5.IEEE802.11MAC 协议规定的三种帧间隔的关系为( )。 A. SIFS >PIFS> DIFS B. PIFS > DIFS >SIFS C. DIFS> SIFS > PIFS D. DIFS>PIFS>SIFS 6.设计传感器网络的硬件结点,以下无需考虑的是( )。 A. 微型化 B. 阻抗匹配 C. 高速率 D. 稳定性 7.下列不属于IEEE802.15.4标准规定的物理层负责的任务为( )。 A. 信道能量检测 B. 信道频率选择 C. 数据的发送和接收 D. 数据检测与压缩 8.下列不属于网络安全考虑的问题是( )。 A.机密性问题 B.低能耗性问题 C.完整性鉴别问题 D.新鲜性问题。 9.下列不属于传感器网络数据融合的作用是( )。 A.提高信息的准确性和全面性 B. 提高系统的可靠性 C.提高数据的实时性 D. 降低信息的不确定性 10.下列不属于传感器网络时间同步机制的主要性能参数为( )。 A.最大误差 B.同步范围 C.可用性 D.鲁棒性 三、名词解释(每题4分,共20分) 1.无线自组织网 2.LR-WPAN 网络 3.传感器的灵敏度 4.战场感知 5. TODA 四、简答题(每题5分,共20分) 1.传感器网络的体系结构包括哪些部分? 2.设计基于竞争的MAC 协议的基本思想是什么? 3.传感器网络实现时间同步的作用是什么? 4. 如何对传感器网络的定位方法进行分类? 五、综述题(共20分) 传感器网络的终端探测节点由哪些部分组成?这些组成模块的功能分别是什么? 络与应用 B 1 3
无线传感器网络试题库附答案 《无线传感器网络》 一、填空题(每题4分,共计60分) 1.传感器网络的三个基本要素:传感器、感知对象、用户(观察者) 2.传感器网络的基本功能:协作式的感知、数据采集、数据处理、发布感知信息3、 3.无线传感器节点的基本功能:采集数据、数据处理、控制、通信 4.无线通信物理层的主要技术包括:介质选择、频段选取、调制技术、扩频技术 5.扩频技术按照工作方式的不同,可以分为以下四种:直接序列扩频、跳频、跳时、宽带 线性调频扩频 6.定向扩散路由机制可以分为三个阶段:兴趣扩展阶段、梯度建立阶段、路径加强阶段 7.无线传感器网络特点:大规模网络、自组织网络、可靠的网络、以数据为中心的网络、 应用相关的网络 8.无线传感器网络的关键技术主要包括:网络拓扑控制、网络协议、时间同步、定位技术、 数据融合及管理、网络安全、应用层技术
9.IEEE标准主要包括:物理层。介质访问控制层 10.简述无线传感器网络后台管理软件结构与组成:后台管理软件通常由数据库、数据处理 引擎、图形用户界面和后台组件四个部分组成。 11.数据融合的内容主要包括:多传感器的目标探测、数据关联、跟踪与识别、情况评估和 预测 12.无线传感器网络可以选择的频段有:_800MHz___915M__、、___5GHz 13.传感器网络的电源节能方法:_休眠(技术)机制、__数据融合 14.传感器网络的安全问题:(1)机密性问题。(2)点到点的消息认证问题。(3)完整 性鉴别问题。 15.规定三种帧间间隔:短帧间间隔SIFS,长度为28s a)、点协调功能帧间间隔PIFS长度是SIFS加一个时隙(slot)长度,即78s b)分布协调功能帧间间隔DIFS,DIFS长度=PIFS+1个时隙长度,DIFS的长度为128 s 16.任意相邻区域使用无频率交叉的频道是,如:1、6、11频道。 17.网络的基本元素SSID标示了一个无线服务,这个服务的内容
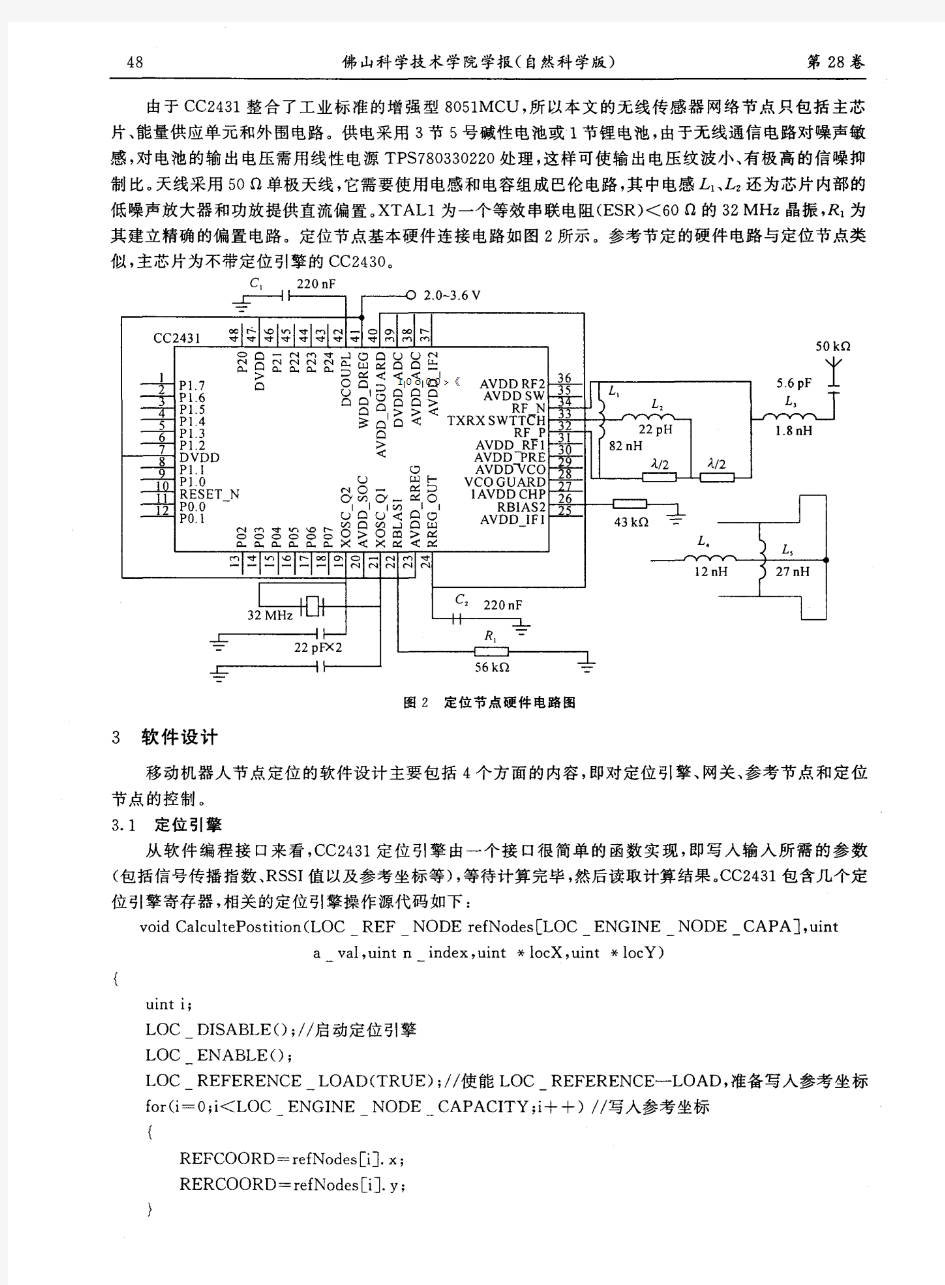
1 系统结构概述 本文设计的WSN硬件平台,由若干传感器节点,具有无线接收功能的汇聚节点,以及一台PC机组成。 根据无线传感器网络的应用需求以及功能要求,节点的设计主要包括如下几个基本部分:传感器单元、处理器单元、A/D单元、射频单元、供电单元以及扩展接口单元。节点的硬件体系结构框架如图1-1 所示。 图1-1 传感器单元负责对所关心的物理量进行测量并采集数据,提供给处理器单元进行处理;处理器单元负责数据处理及控制整个节点的正常工作;射频天线单元负责与其他节点进行无线通信,交换控制信息和相关数据;供电单元负责为节点提供运行所需的能量;扩展接口可以实现节点平台的功能拓展,以适应不同的应用需求。 2 节点核心模块设计: 2-1电源模块设计: 电源是设计中的关键部分,电源稳定工作是整个节点正常工作的保证,设计合理的电源电路至关重要。节点包含模拟器件和数字器件,模拟器件的抗干扰能力较差,且数字器件常常为模拟器件的噪声源,故为了 图2-1-1 提高电路的抗干扰能力,模拟器件接模拟地并采用数字地与模拟地单点共地。电源可选用电池或干电池,电源芯片可选用XC6209、XC6221系列的LDO电源芯片,分别提供3.3V和1.8V的数字与模拟电压,电路如图2-1-1所示。 2-2传感器 模块设计: 温度传感器设 计:本设计采用 LM75DM-33R2串行 可编程温度传感 器,这种传感器在 环境温度超出用户 变成设置时通知主 控制器。滞后也是 可以编程解决。它 采用2线总线方式,允许读入当前温度,并可配置器件。它是数字型温度传感器,直接从
寄存器读出温度参数,并可实现编程设置INT/CMPTR输出极性。 图2-2-1是其功能图,因为设计中只是简单的监测环境的温度,故只需一片 LM75,所以地址线A0、A1、A2置地,INT/CMPTR悬空,设计的接口电路如图2-2-2所示。 图2-2-1 图2-2-2 因为cc2431本身带有A/D模块,也可采用温度传感器AD590测量温度,其接口电路如图2-2-3。