2008年振动力学期末考试试题
第一题(20分)
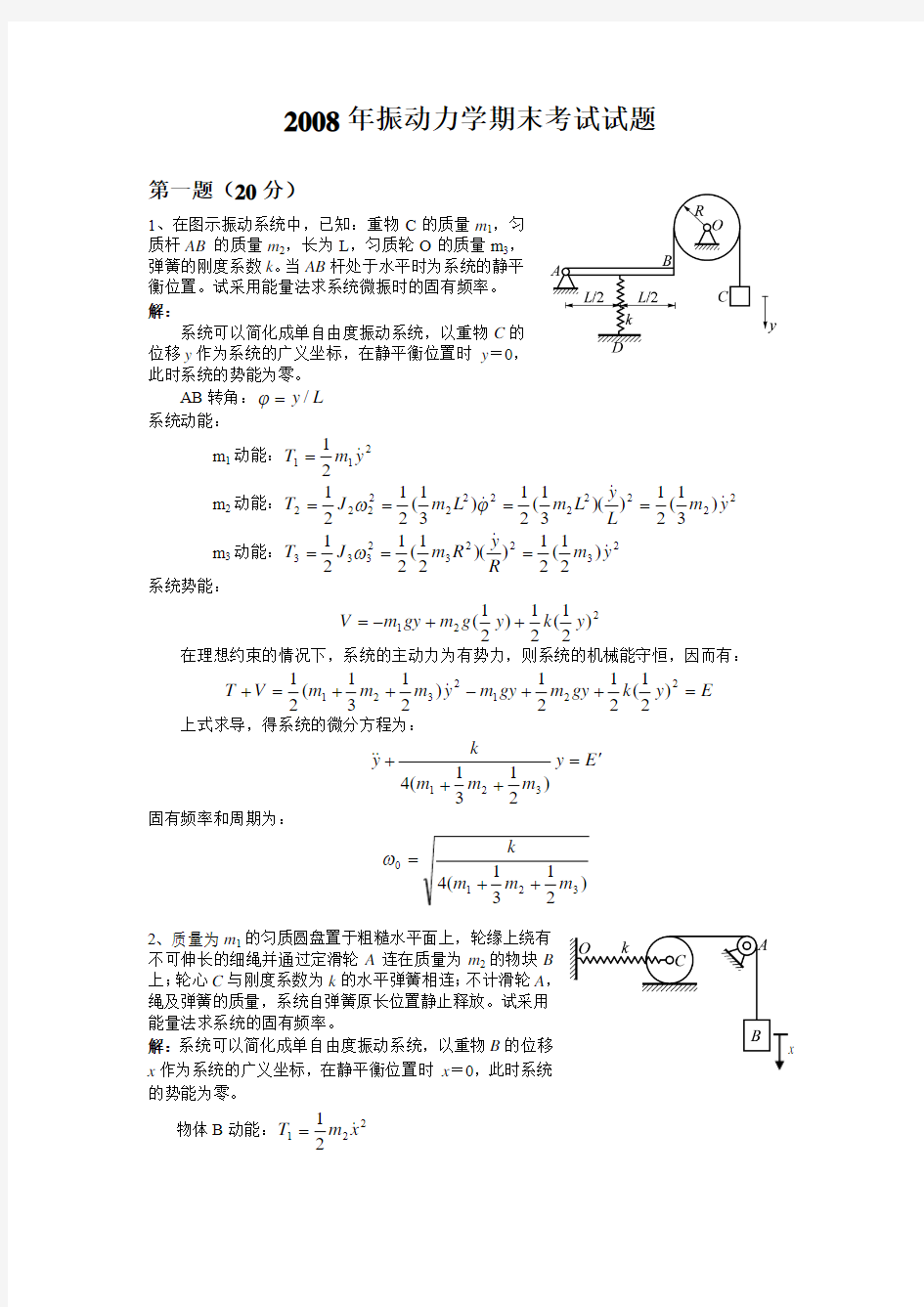
1、在图示振动系统中,已知:重物C 的质量m 1,匀质杆AB 的质量m 2,长为L ,匀质轮O 的质量m 3,弹簧的刚度系数k 。当AB 杆处于水平时为系统的静平衡位置。试采用能量法求系统微振时的固有频率。 解:
系统可以简化成单自由度振动系统,以重物C 的位移y 作为系统的广义坐标,在静平衡位置时 y =0,此时系统的势能为零。
AB 转角:L y /=? 系统动能:
m 1动能:2112
1
y m T =
m 2动能:2222222
22222)3
1(21))(31(21)31(2121y m L y L m L m J T ====?
ω m 3动能:2322
32333)2
1(21))(21(2121y
m R y R m J T ===ω 系统势能:
221)2
1
(21)21(y k y g m gy m V ++-=
在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有:
E y k gy m gy m y
m m m V T =++-++=
+2212321)2
1
(2121)2131(21 上式求导,得系统的微分方程为:
E y m m m k
y
'=+++)
2
1
31(4321
固有频率和周期为:
)
2
131(43210m m m k
++=
ω
2、质量为m 1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过定滑轮A 连在质量为m 2的物块B 上;轮心C 与刚度系数为k 的水平弹簧相连;不计滑轮A ,绳及弹簧的质量,系统自弹簧原长位置静止释放。试采用能量法求系统的固有频率。
解:系统可以简化成单自由度振动系统,以重物B 的位移x 作为系统的广义坐标,在静平衡位置时 x =0,此时系统的势能为零。
物体B 动能:2212
1
x m T =
轮子与地面接触点为速度瞬心,则轮心速度为x v c 21=,角速度为x R
21=ω,转过的角度为x R
21
=
θ。轮子动能: )83
(21)41)(21(21)41(212121212221212212x m x R
R m x
m J v m T c =+=+=ω 系统势能:
22228
)21(21)(2121x k
xR R k R k kx V c ====
θ 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,有:
E x k
x
m m V T =++=
+22218
)83(21
上式求导得系统的运动微分方程:
08322
1=++x m m k
x
固有频率为:
2
10832m m k
+=
ω
第二题(20分)
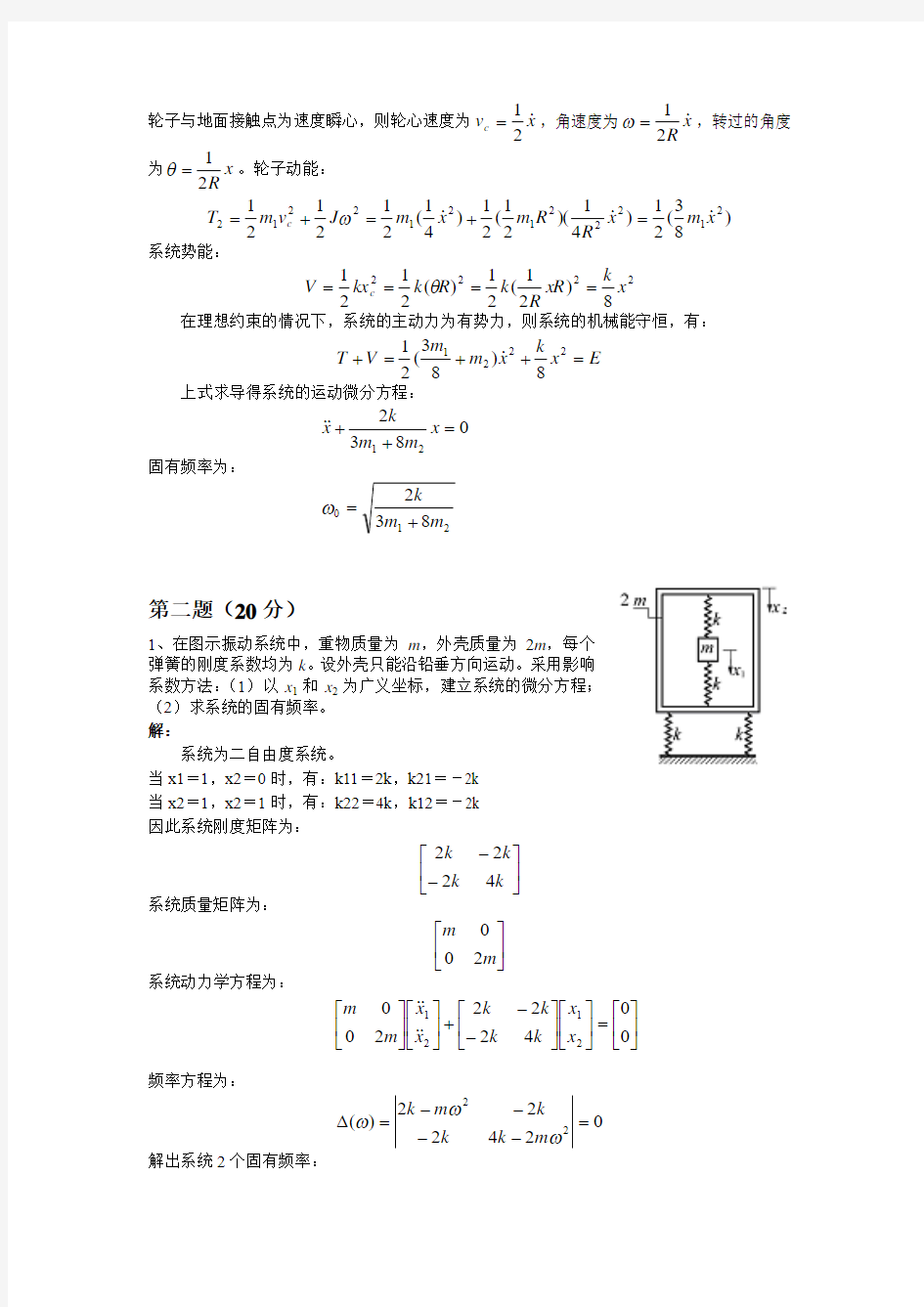
1、在图示振动系统中,重物质量为m ,外壳质量为2m ,每个弹簧的刚度系数均为k 。设外壳只能沿铅垂方向运动。采用影响系数方法:(1)以x 1和x 2为广义坐标,建立系统的微分方程;(2)求系统的固有频率。 解:
系统为二自由度系统。
当x1=1,x2=0时,有:k11=2k ,k21=-2k 当x2=1,x2=1时,有:k22=4k ,k12=-2k 因此系统刚度矩阵为:
??
?
??
?--k k k k 4222 系统质量矩阵为:
??
????m m 200 系统动力学方程为:
??
?
???=????????????--+????????????0042222002121x x k k k k x
x m m
频率方程为:
024222)(Δ2
2
=----=
ω
ωωm k k
k
m k 解出系统2个固有频率:
m k )
22(21-=ω,m
k )22(2
2+=ω
2、在图示振动系统中,物体A 、B 的质量均为m ,弹簧的刚度系数均为k ,刚杆AD 的质量忽略不计,杆水平时为系统的平衡位置。采用影响系数方法,试求:(1)以x 1和x 2为广义坐标,求系统作微振动的微分方程;(2)系统的固有频率方程。 解:
系统可以简化为二自由度振动系统,以物体A 和B 在铅垂方向的位移x 1和x 2为系统的广义坐标。
当x1=1,x2=0时,AD 转角为L 3/1=θ,两个弹簧处的弹性力分别为L k θ和L k θ2。对D 点取
力矩平衡,有:kL k 9
14
11=;另外有kL k -=21。 同理,当x2=1,x2=1时,可求得:
kL k =22,kL k -=12 因此,系统刚度矩阵为:
???
?
????--kL kL kL kL 914 系统质量矩阵为:
??
????m m 00 系统动力学方程为:
??
????=??????????????--+????????????00914002121x x kL kL kL kL x x m m
频率方程为:
09
142
2=----ω
ωm kL kL
kL m kL
即:
0523922242=+-L k kmL m ωω
第三题(20分)
在图示振动系统中,已知:物体的质量m 1、m 2及弹簧的刚度系数为k 1、k 2、k 3、k 4。(1)采用影响系数方法建立系统的振动微分方程;(2)若k 1= k 3=k 4= k 0,又k 2=2 k 0,求系统固有频率;(3)取k 0 =1,m 1=8/9,m 2 =1,系统初始位移条件为x 1(0)=9和x 2(0)=0,初始速度都为零,采用模态叠加法求系统响应。 解:
(1)系统可以简化为二自由度振动系统。 当x1=1,x2=0时,有:
k11=k1+k2+k4,k21=-k2
x x
当x2=1,x2=1时,有:k22=k2+k3,k12=-k2。因此,系统刚度矩阵为:
???
??
?+--++3222421k k k k k k k
系统质量矩阵为:
??
???
?21
00m m 系统动力学方程为:
??
?
???=????????????+--+++???????????
?00002132224212121x x k k k k k k k x x
m m
(2)当0431k k k k ===,022k k =时,运动微分方程用矩阵表示为:
??
?
???=????????????--+???????????
?003224002100002121
x x k k k k x x
m m 频率方程为:
04)3)(4(2
0220210=---k m k m k ωω 08)43(2
02021421=++-k k m m m m ωω
求得:
)168943(22
22121212
1021m m m m m m m m k +--+?=
ω
)168943(22
22121212
1022m m m m m m m m k +-++?=
ω
(3)当k 0=1,m 1=8/9,m 2 =1时,系统质量阵:
???
?
????=10098M 系统刚度阵:
??
????--=3224K
固有频率为:
2
321=
ω,62
2=ω 主模态矩阵为:
???
????
?-=11234
3Φ 主质量阵:
???
?
????==300
23M ΦΦM T
p
主刚度阵:
???
?
????==18004
9K ΦΦK T
p 模态空间初始条件:
??
????-=??????=??????-44)0()0()0()0(21
121x x q q Φ, ??????=??????=??????-00)0()0()0()0(21
121x
x q q Φ 模态响应:
01211=+q q ω ,022
22=+q q ω
即:
t t q 11cos 4)(ω=,t t q 22cos 4)(ω-=
因此有:
???-+=??????=??????t t t t t q t q t x t x 2
1212121cos 4cos 4cos 6cos 3)()()()(ωωωωΦ
第四题(20分)
一匀质杆质量为m ,长度为L ,两端用弹簧支承,弹簧的刚度系数为k 1和k 2。杆质心C 上沿x 方向作用
有简谐外部激励t ωsin 。图示水平位置为静平衡位置。(1)以x 和θ为广义坐标,采用影响系数方法建立系统的振动微分方程;(2)取参数值为m=12,L =1,k 1 =1,k 2 =3,求出系统固有频率;(2)系统参数仍取前值,试问当外部激励的频率ω为多少时,能够使得杆件只有θ方向的角振动,而无x 方向的振动? 解:
(1)系统可以简化为二自由度振动系统,选x 、θ为广义坐标,x 为质心的纵向位移,θ 为刚杆的角位移,如图示。
当1=x 、0=θ时:
2111k k k +=,2
)
(1221L k k k -= 当0=x 、1=θ时:
2)(1211L k k k -=,4
)(2
2122L k k k +=
因此,刚度矩阵为:
?
?
???
??
??
?
+--+=4)(2)(2)
(22112122
1L k k L
k k L k k k k K 质量矩阵为:
???
?????=212100mL m M 系统动力学方程:
??????=???????????
?????
+--++??????????????0sin 4)(2)
(2)
(121002*********t x L k k L k k L k k k k x mL m ωθθ
(2)当m=12,L =,k 1 =1,k 2 =3时,系统动力学方程为:
??
????=????????????+????????????0sin 111410012t x x ωθθ
频率方程为:
011
112420
2
=--ω
ω
即:
0316122040=+-ωω
求得:
6
7
420±=
ω (3)令t x x ωθθsin ??
?
???=??????,代入上述动力学方程,有:
??
?
???=??????????????--0111112422θωωx 由第二行方程,解得2
1ωθ--
=x
,代入第一行的方程,有:
2
1
k ?
?θ 1=
1
)124(12
2---=ωωx ,]1)124[(2
---=ωθ 要使得杆件只有θ方向的角振动,而无x 方向的振动,则需0=x ,因此1=ω。
第五题(20分)
如图所示等截面悬臂梁,梁长度为L ,弹性模量为E ,横截面对中性轴的惯性矩为I ,梁材料密度为ρ。在梁的a 位置作用有集中载荷)(t F 。已知梁的初始条
件为:)()0,(1x f x y =,)()0,(2x f x y = 。(1)推
导梁的正交性条件;(2)写出求解梁的响应),(t x y 的详细过程。
(假定已知第i 阶固有频率为i ω,相应的模态函数为)(x i φ,∞=~1i )
提示:梁的动力学方程为:),(]),([222222t x f t
y S x t x y EI x =??+????ρ,其中)()(),(a x t F t x f -=δ,δ为δ函数。
解:
(1)梁的弯曲振动的动力学方程为:
0),(]),([222222=??+????t
t x y S x t x y EI x ρ ),(t x y 可写为:
)sin()()()(),(θωφφ+==t a x t q x t x y
代入梁的动力学方程,有:
φρωφS EI 2)(=''''
设与i ω、j ω对应有i φ、j φ,有: i i i S EI φρωφ2)(=''''
(1)
j j j S EI φρωφ2
)(=''''
(2)
式(1)两边乘以j φ并沿梁长对x 积分,有:
??=''''l
j i i l
i j dx S dx EI 0
20
)(φφρωφφ (3)
利用分部积分,上式左边可写为:
??''''+'''-'''=''''l l
j i l i j l i j i j dx EI EI EI dx EI 0
00)()()(φ
φφφφφφφ (4)
由于在梁的简单边界上,总有挠度或剪力中的一个与转角或弯矩中的一个同时为零,所以,
上式右边第一、第二项等于零,成为:
??''''=''''l l
j i i j dx EI dx EI 0
)(φ
φφφ 将上式代入(3)中,有:
?
?=''''l
l
j i i j i dx S dx EI 0
2
φφρωφφ
(5)
式(2)乘i φ并沿梁长对x 积分,同样可得到:
??=''''l
l
j
i j
j
i dx S dx EI 0
2
φφρωφ
φ (6)
由式(5)、(6)得:
?=-l
j i j
i dx S 0
220)(φφρωω
(7)
如果j i ≠时,j i ωω≠,则有:
?=l
j
i dx S 0
0φφρ 当j i ≠
(8)
上式即梁的主振型关于质量的正交性。再由(3)及(6)可得:
?=''''l
j
i dx EI 0
0φ
φ 当j i ≠ ?=''''l i
j
dx EI 0
0)(φφ 当j i ≠
上两式即梁的主振型关于刚度的正交性。
当j i =时,式(7)总能成立,令:
?
=l
pj j M dx S 0
2φρ
pj M 、pj K 即为第j 阶主质量和第j 阶主刚度。
由式(6)知有:pj
pj j M K =
2ω
如果主振型)(x j φ中的常数按下列归一化条件来确定:
10
2
==?pj
l
j
M
dx S φρ
(9)
则所得的主振型称为正则振型,这时相应的第j 阶主刚度pj K 为2j ω。
式(9)与(8)可合并写为:
?=l ij
j
i dx S 0
δφφρ
由式(6)知有:?=''''l ij
j j
i dx EI 0
2
δωφ
φ, ?=''''l ij
j
j
j
dx EI 0
2)(δωφφ
(2)悬臂梁的运动微分方程为: ),(2244t x f t y
S x y EI =??+??ρ (1)
其中:
)()(),(a x t F t x f -=δ
(2)
令:
∑∞
==1
)()(),(i i i t q x t x y φ
(3)
代入运动微分方程,有:
),()(1
1
t x f q S q EI i i i i i i =+''"∑∑∞
=∞
= φρφ (4)
上式两边乘)(x j φ,并沿梁长度对x 进行积分,有:
?∑?∑?
=+''"∞=∞
=L j i L j i i i L j i i dx t x f dx S q
dx EI q 0
1
1
),()(φφφρφφ (5)
利用正交性条件,可得:
)()()(2t Q t q t q j j j j =+ω
(6)
其中广义力为:
)()()()()()(0
a t F dx a x t F dx t f t Q j L
j L
j j φφδφ=-==??
(7)
初始条件可写为:
???
????
====∑∑∞
=∞
=121
1)0()()()0,()0()()()0,(i i i i i i q x x f x y q x x f x y φφ (8)
上式乘以)(x S j φρ,并沿梁长度对x 积分,由正交性条件可得:
?????==??dx
x x Sf q dx
x x Sf q j L
j
j L j
)()()0()()()0(0201φρφρ (9)
由式(6),可得:
??
-+
+
=-+
+
=L
j j j
j j
j j j L j j j
j j
j j j j d t F a t q
t q d t Q t q
t q t q 0
)(sin )()(1
sin )0(cos )0()(sin )(1
sin )0(cos )0()(τ
τωτφωωωωτ
τωτωωωω (10)
利用式(3),梁的响应为:
∑?∑∞
=∞
=??
?
?????-++==101
)(sin )()(1
sin )0(cos )0()()
()(),(i L j j j j j j j j i i i i d t F a t q t q x t q x t x y ττωτφωωωωφφ
工作岗位研究原理与应用 一、单项选择题 1、()是对职工所应承担任务的规定。 A、职务 B、责任 C、职责 D、岗位 2、()是严格按照编制员额和岗位的质量要求,为企业每个岗位配备合格的人员。 A、定编 B、定员 C、定额 D、岗位责任制 3、岗位研究中,采用的心理学研究方法有()。 A、测验法、观察法、评定量表法 B、测验法、面谈法、调查法 C、观察法、参与法、测验法 D、面谈法、观察法、参与法 4、美国工程师()是企业科学管理的主要倡导人,举世公认的“科学管理之父”。 A、弗兰克·吉尔·雷斯 B、泰勒C怀特D、迈克尔·朱修斯 5、工作日写实是对操作者整个工作日的工作时利用情 况,按()的顺序进行观察、记录和分析的一种方法。 A、时间消耗 B、工作的繁简程度 C、工作重要性的大小 D、技术操作 6、测时是以工序或某一作业为对象,按照操作顺序进行 实地观察,记录、测量和研究()的一种方法。 A、人力资源B工时消耗C、财力消耗D、体力消耗 7、工作抽样法是根据()的原理,对工作岗位随机地进行抽样调查的一种方法。 A、微积分和概率论 B、测量学和统计学 C、概率论和数理统计学 D、数理统计学和微积分 8、()是对企业各类岗位的性质、任务、职责、劳动条件和环境以及职工承担本岗位任务应具备的资格条件所进行系统分析和研究,并制定出岗位规范、工作说明书等人事文件的过程。 A、岗位调查 B、岗位分析 C、岗位评论价 D、岗位分类 9、()是通过调查者直接参与某一岗位的工作,从而细致、深入、全面地体验、了解和分析岗位特征及岗位要求的方法。 A、面谈法 B、参与法 C、关键事件法 D、书面调查法 10、岗位分析的结果——工作说明书、岗位规范以及职务晋升图必须以良好的()为基础,才能发挥其应有的作用。 A、岗位分类 B、岗位设计 C、岗位调查 D、岗位评价 11、()是把既可归为熟练工种又可归为技术工种的某些特殊工种,先分别划岗归级,再根据这些工种在不同类型中的岗位等级,求出技术工种与熟练工种之间的统一岗级换算比例,然后归级。 A、经验判断法 B、基本点数换算法 C、交叉岗位换算法 D、专家评判法 12、测评误差可分为()和代表性误差两大类。 A、系统误差 B、随机误差 C、抽样误差 D、登记误差 13、()就是岗位纵向分类中的细类或称小类,是若干性质相同但其他方面存在一定差别的岗位群。 A、岗级 B、岗等 C、岗系 D、岗类 14、体力劳动强度的测定主要有()测定两方面的内容。 A、劳动时间率和工作利用率 B、工作利用率和能量
《振动力学》习题集(含答案) 1.1 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图E1.1所示。求系统的固有频率。 图E1.1 解: 系统的动能为: ()22 2 121x I l x m T &&+= 其中I 为杆关于铰点的转动惯量: 2102120131l m dx x l m x dx l m I l l ??==?? ? ??= 则有: ()2 212212236 16121x l m m x l m x ml T &&&+=+= 系统的势能为: ()()()2 1212124 1 4121 cos 12 cos 1glx m m glx m mglx x l g m x mgl U +=+=-? +-= 利用x x n ω=&和U T =可得: ()()l m m g m m n 113223++= ω
1.2 质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图E1.2所示。求系统的固有频率。 图E1.2 解: 如图,令θ为柱体的转角,则系统的动能和势能分别为: 2222224321212 1θθθ&&&mR mR mR I T B =?? ? ??+== ()[]()22 22 12θθa R k a R k U +=+?= 利用θωθ n =&和U T =可得: ()m k R a R mR a R k n 34342 2 +=+=ω
1.3 转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图E1.3所 示。求系统的固有频率。 图E1.3 解: 系统的动能为: 22 1θ&J T = 2k 和3k 相当于串联,则有: 332232 , θθθθθk k =+= 以上两式联立可得: θθθθ3 22 33232 , k k k k k k +=+= 系统的势能为: ()232323212 332222*********θθθθ?? ????+++=++=k k k k k k k k k k U 利用θωθ n =&和U T =可得: ()() 3232132k k J k k k k k n +++= ω
试举出振动设计、系统识别和环境预测的实例。 如果把双轴汽车的质量分别离散到前、后轴上去,在考虑悬架质量和非悬架质量两个离散质量的情况下,画出前轴或后轴垂直振动的振动模型简图,并指出在这种化简情况下,汽车振动有几个自由度?
设有两个刚度分别为1k ,2k 的线性弹簧如图T —所示,试证明: 1)它们并联时的总刚度eq k 为:21k k k eq += 2)它们串联时的总刚度eq k 满足: 2 1111k k k eq += 解:1)对系统施加力P ,则两个弹簧的变形相同为x ,但受力不同,分别为: 1122P k x P k x =?? =? 由力的平衡有:1212()P P P k k x =+=+ 故等效刚度为:12eq P k k k x = =+ 2)对系统施加力P ,则两个弹簧的变形为: 11 22P x k P x k ?=??? ?=?? ,弹簧的总变形为:1212 11()x x x P k k =+=+ 故等效刚度为:122112 111 eq k k P k x k k k k ===++
求图所示扭转系统的总刚度。两个串联的轴的扭转刚度分别为1t k ,2t k 。 解:对系统施加扭矩T ,则两轴的转角为: 11 22t t T k T k θθ?=??? ?=?? 系统的总转角为: 1212 11 ( )t t T k k θθθ=+=+, 12111()eq t t k T k k θ==+ 故等效刚度为: 12 111 eq t t k k k =+
两只减振器的粘性阻尼系数分别为1c ,2c ,试计算总粘性阻尼系数eq c 1)在两只减振器并联时, 2)在两只减振器串联时。 解:1)对系统施加力P ,则两个减振器的速度同为x &,受力分别为: 1122 P c x P c x =?? =?&& 由力的平衡有:1212()P P P c c x =+=+& 故等效刚度为:12eq P c c c x = =+& 2)对系统施加力P ,则两个减振器的速度为: 11 22P x c P x c ? =????=?? &&,系统的总速度为:12 12 11()x x x P c c =+=+&&& 故等效刚度为:12 11 eq P c x c c = =+&
1.转动惯量为J 的圆盘由三段抗扭刚度分别为1k 、2k 和3k 的轴约束,如图所示。求系统的固有频率。 解: 系统的动能为 2 2 1?=θJ T 2k 和3k 相当于串联,则 32θθθ += 3322θθk k = 联立以上两式得 θθ3 23 2k k k += θθ3223k k k += 系统的势能为 ( )[]2 2 33222213 23 23212 1212121θ θθθk k k k k k k k k k U +++= ++= 利用θωθn =? 和U T =可得 () () 3232132n k k J k k k k k +++= ω 2.面积为S ,质量为m 的薄板连接于弹簧下端,在粘性流体中振动,如图所示。作用于薄板的阻尼力为νμS F d 2=,S 2为薄板总面积,ν为速度。若测得薄板无阻尼自由振动的周期为0T ,在粘性流体中自由振动的周期为d T 。求系数μ。
解: 平面在液体中上下振动时: 02=++? ? ?kx x S x m μ d n d n T T m k πξ ωωπω2-1,220==== k S m S m S n n 222,22μξωμξξωμ==?= k S k 2 22 --1μξ= 2020220 -2-22T T T ST m k S k T T T T d d d πμμ=?= 3.如图所示均匀刚性杆质量为1m ,求系统的频率方程。 解:
先求刚度矩阵。 令0x 1,==θ得: 22212111a k b k a a k b b k k +=?+?= b k 221-k = 令1,0==x θ得: a k k 212-= 222-k k = 则刚度矩阵为:?? ? ? ??+=2222221--k a k a k a k b k K 再求质量矩阵。 令0,1==? ?? ?x θ ,得: 0,3 1 212111==m a m m
第十五章 机械振动 一 选择题 1. 对一个作简谐振动的物体,下面哪种说法是正确的?( ) A. 物体在运动正方向的端点时,速度和加速度都达到最大值; B. 物体位于平衡位置且向负方向运动时,速度和加速度都为零; C. 物体位于平衡位置且向正方向运动时,速度最大,加速度为零; D. 物体处负方向的端点时,速度最大,加速度为零。 解:根据简谐振动的速度和加速度公式分析。 答案选C 。 2.下列四种运动(忽略阻力)中哪一种不是简谐振动?( ) A. 小球在地面上作完全弹性的上下跳动; B. 竖直悬挂的弹簧振子的运动; C. 放在光滑斜面上弹簧振子的运动; D. 浮在水里的一均匀球形木块,将它部分按入水中,然后松开,使木块上下浮动。 解:A 中小球没有受到回复力的作用。 答案选A 。 3. 一个轻质弹簧竖直悬挂,当一物体系于弹簧的下端时,弹簧伸长了l 而平衡。则此系统作简谐振动时振动的角频率为( ) A. l g B. l g C. g l D. g l 解 由kl =mg 可得k =mg /l ,系统作简谐振动时振动的固有角频率为l g m k ==ω。 故本题答案为B 。 4. 一质点作简谐振动(用余弦函数表达),若将振动速度处于正最大值的某时刻取作t =0,则振动初相?为( ) A. 2π- B. 0 C. 2π D. π 解 由 ) cos(?ω+=t A x 可得振动速度为 ) sin(d d ?ωω+-==t A t x v 。速度正最大时有0) cos(=+?ωt ,1) sin(-=+?ωt ,若t =0,则 2 π-=?。 故本题答案为A 。 5. 如图所示,质量为m 的物体,由劲度系数为k 1和k 2的两个轻弹簧连接,在光滑导轨上作微小振动,其振动频率为 ( )
1-1一个物体放在水平台面上,当台面沿铅垂方向作频率为5 Hz的简谐振动时,要使物体不跳离平台,对台面的振幅应有何限制? 解:物体与桌面保持相同的运动,知桌面的运动为 , x=A sin10πt; 由物体的受力分析,N = 0(极限状态) 物体不跳离平台的条件为:; 既有, , 由题意可知Hz,得到,mm。 1-2有一作简谐振动的物体,它通过距离平衡位置为cm及cm 时的速度分别为20 cm/s及cm/s,求其振动周期、振幅和最大速度。解: 设该简谐振动的方程为;二式平方和为 将数据代入上式: ; 联立求解得 A=10.69cm;1/s;T=s 当时,取最大,即: 得:
答:振动周期为2.964s;振幅为10.69cm;最大速度为22.63m/s。 1-3 一个机器内某零件的振动规律为 ,x的单位是cm,1/s 。这个振 动是否为简谐振动?试求它的振幅、最大速度及最大加速度,并用旋转矢量表示这三者之间的关系。 解: 振幅A=0.583 最大速度 最大加速度 1-4某仪器的振动规律为。此振动是否为简谐振动?试用x- t坐标画出运动图。 解:因为ω1=ωω2=3ω,ω1≠ω2.又因为T1=2π/ω T2=2π/3ω,所以,合成运动为周期为T=2π/3ω的非简谐运动。两个不同频率的简谐振动合成不是简谐振动,当频率比为有理数时,可合称为周期振动,合成振动的周期是两个简谐振动周期的最小公倍数。 1-5已知以复数表示的两个简谐振动分别为和,试求它们的合成的复数表示式,并写出其实部与虚部。 解:两简谐振动分别为,, 则:=3cos5t+3isin5t =5cos(5t+)+3isin(5t+) 或; 其合成振幅为:=
… 2008年振动力学期末考试试题 第一题(20分) 1、在图示振动系统中,已知:重物C 的质量m 1,匀质杆AB 的质量m 2,长为L ,匀质轮O 的质量m 3,弹簧的刚度系数k 。当AB 杆处于水平时为系统的静平衡位置。试采用能量法求系统微振时的固有频率。 解: 系统可以简化成单自由度振动系统,以重物C 的位移y 作为系统的广义坐标,在静平衡位置时 y =0,此时系统的势能为零。 AB 转角: 系统动能: % m 1动能: m 2动能: m 3动能: 系统势能: 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有: 上式求导,得系统的微分方程为: E y m m m k y '=+++) 2 1 31(4321 固有频率和周期为: ~ ) 2 131(43210m m m k ++= ω 2、质量为m 1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过定滑轮A 连在质量为m 2的物块B 上;轮心C 与刚度系数为k 的水平弹簧相连;不计滑轮A ,绳及弹簧的质量,系统自弹簧原长位置静止释放。试采用能量法求系统的固有频率。 解:系统可以简化成单自由度振动系统,以重物B 的位移x 作为系统的广义坐标,在静平衡位置时 x =0,此时系统的势能为零。 物体B 动能:2212 1 x m T = 轮子与地面接触点为速度瞬心,则轮心速度为x v c 21=,角速度为x R 21=ω,转过的角度为x R 21 = θ。轮子动能: )83 (21)41)(21(21)41(212121212221212212x m x R R m x m J v m T c =+=+=ω \ x
一、 选择题 1、一质点作简谐振动,其运动速度与时间的曲线如图所示,若质点的振动按余弦函数描述,则其初相为 [ D ] (A ) 6π (B) 56π (C) 56π- (D) 6π- (E) 23 π- 2、已知一质点沿y 轴作简谐振动,如图所示。其振动方程为3cos()4 y A t π ω=+,与之对应的振动曲线为 [ B ] 3、一质点作简谐振动,振幅为A ,周期为T ,则质点从平衡位置运动到离最大 振幅 2A 处需最短时间为 [ B ] (A );4T (B) ;6T (C) ;8 T (D) .12T 4、如图所示,在一竖直悬挂的弹簧下系一质量为m 的物体,再用此弹簧改系一质量为m 4的物体,最后将此弹簧截断为两个弹簧后并联悬挂质量为m 的物体, 此三个系统振动周期之比为 (A);2 1 : 2:1 (B) ;2:21:1 [ C ] (C) ;21:2:1 (D) .4 1 :2:1
5、一质点在x 轴上作简谐振动,振幅cm A 4=,周期s T 2=,其平衡位置取坐标原点。若0=t 时刻质点第一次通过cm x 2-=处,且向x 轴负方向运动,则质点第二次通过cm x 2-=处的时刻为 (A);1s (B) ;32s (C) ;34 s (D) .2s [ B ] 6、一长度为l ,劲度系数为k 的均匀轻弹簧分割成长度分别为21,l l 的两部分, 且21nl l =,则相应的劲度系数1k ,2k 为 [ C ] (A );)1(,121k n k k n n k +=+= (B );11,121k n k k n n k +=+= (C) ;)1(,121k n k k n n k +=+= (D) .1 1 ,121k n k k n n k +=+= 7、对一个作简谐振动的物体,下面哪种说法是正确的 [ C ] (A ) 物体处在运动正方向的端点时,速度和加速度都达到最大值; (B ) 物体位于平衡位置且向负方向运动时,速度和加速度都为零; (C ) 物体位于平衡位置且向正方向运动时,速度最大,加速度为零; (D ) 物体处于负方向的端点时,速度最大,加速度为零。 8、 一个质点作简谐振动,振幅为A ,在起始时刻质点的位移为 A 2 1 ,且向x 轴的正方向运动,代表此简谐振动的旋转矢量图为 [ B ]
2008年振动力学期末考试试题 第一题(20分) 1、在图示振动系统中,已知:重物C 的质量m 1,匀质杆AB 的质量m 2,长为L ,匀质轮O 的质量m 3,弹簧的刚度系数k 。当AB 杆处于水平时为系统的静平衡位置。试采用能量法求系统微振时的固有频率。 解: 系统可以简化成单自由度振动系统,以重物C 的位移y 作为系统的广义坐标,在静平衡位置时 y =0,此时系统的势能为零。 AB 转角:L y /=? 系统动能: m 1动能:2112 1 y m T = m 2动能:2222222 22222)3 1(21))(31(21)31(2121y m L y L m L m J T ====? ω m 3动能:2322 32333)2 1(21))(21(2121y m R y R m J T ===ω 系统势能: 221)2 1 (21)21(y k y g m gy m V ++-= 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有: E y k gy m gy m y m m m V T =++-++= +2212321)2 1 (2121)2131(21 上式求导,得系统的微分方程为: E y m m m k y '=+++) 2 1 31(4321 固有频率和周期为: ) 2 131(43210m m m k ++= ω 2、质量为m 1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过定滑轮A 连在质量为m 2的物块B 上;轮心C 与刚度系数为k 的水平弹簧相连;不计滑轮A ,绳及弹簧的质量,系统自弹簧原长位置静止释放。试采用能量法求系统的固有频率。 解:系统可以简化成单自由度振动系统,以重物B 的位移x 作为系统的广义坐标,在静平衡位置时 x =0,此时系统的势能为零。 物体B 动能:2212 1 x m T =
《振动力学》习题集(含答案) 质量为m 的质点由长度为l 、质量为m 1的均质细杆约束在铅锤平面内作微幅摆动,如图所示。求系统的固有频率。 图 解: 系统的动能为: ()22 2 121x I l x m T &&+= 其中I 为杆关于铰点的转动惯量: 2102120131l m dx x l m x dx l m I l l ??==?? ? ??= 则有: ()2 212212236 16121x l m m x l m x ml T &&&+=+= 系统的势能为: ()()()2 1212124 1 4121 cos 12 cos 1glx m m glx m mglx x l g m x mgl U +=+=-? +-= 利用x x n ω=&和U T =可得: ()()l m m g m m n 113223++= ω
质量为m 、半径为R 的均质柱体在水平面上作无滑动的微幅滚动,在CA=a 的A 点系有两根弹性刚度系数为k 的水平弹簧,如图所示。求系统的固有频率。 图 解: 如图,令θ为柱体的转角,则系统的动能和势能分别为: 2222224321212 1θθθ&&&mR mR mR I T B =?? ? ??+== ()[]()22 22 12θθa R k a R k U +=+?= 利用θωθ n =&和U T =可得: ()m k R a R mR a R k n 34342 2 +=+=ω
转动惯量为J 的圆盘由三段抗扭刚度分别为1k ,2k 和3k 的轴约束,如图所示。求系统 的固有频率。 图 解: 系统的动能为: 22 1θ& J T = 2k 和3k 相当于串联,则有: 332232 , θθθθθk k =+= 以上两式联立可得: θθθθ3 22 33232 , k k k k k k +=+= 系统的势能为: ()232323212 332222*********θθθθ?? ????+++=++=k k k k k k k k k k U 利用θωθ n =&和U T =可得: ()() 3232132k k J k k k k k n +++= ω
专题十九、机械振动机械波 1.如图,t=0时刻,波源在坐标原点从平衡位置沿y轴正方向开始振动,振动周期为0.4s,在同一均匀介质中形成沿x轴正、负两方向传播的简谐横波。下图中能够正确表示t=0.6时波形的图是 答案:C 解析:波源振动在同一均匀介质中形成沿x轴正、负两方向传播的简谐横波。t=0.6时沿x轴正、负两方向各传播1.5个波长,能够正确表示t=0.6时波形的图是C。2.做简谐振动的物体,当它每次经过同一位置时,可能不同的物理量是 (A)位移(B)速度(C)加速度(D)回复力 答案:B 解析:做简谐振动的物体,当它每次经过同一位置时,位移相同,加速度相同,位移相同,可能不同的物理量是速度,选项B正确。 3.一列横波沿水平绳传播,绳的一端在t=0时开始做周期为T的简谐运动,经过时间t(3 4 T <t<T),绳上某点位于平衡位置上方的最大位移处。则在2t时,该点位于平衡位置的 (A)上方,且向上运动(B)上方,且向下运动 (C)下方,且向上运动(D)下方,且向下运动 答案:B 解析:由于再经过T时间,该点才能位于平衡位置上方的最大位移处,所以在2t时,该点位于平衡位置的上方,且向上运动,选项B正确。 4.在学校运动场上50 m直跑道的两端,分别安装了由同一信号发生器带动的两个相同的扬声器。两个扬声器连续发出波长为5 m的声波。一同学从该跑道的中点出发,向某一端点缓慢行进10 m。在此过程中,他听到扬声器声音由强变弱的次数为()A.2 B.4 C.6 D.8 答案:B 解析:向某一端点每缓慢行进2.5m,他距离两波源的路程差为5m,听到扬声器声音强,缓慢行进10 m,他听到扬声器声音由强变弱的次数为4次,选项B正确。 5. 如图,a. b, c. d是均匀媒质中x轴上的四个质点.相邻两点的间距依次为2m、4m和6m 一列简谐横波以2m/s的波速沿x轴正向传播,在t=0时刻到达质点a处,质点a由平衡位置开始竖直向下运动,t=3s时a第一次到达最高点。下列说法正确的是 (填正确答
第一章 概述 1.一简谐振动,振幅为0、20cm,周期为0、15s,求最大速度与加速度。 解: max max max 1*2***2***8.37/x w x f x A cm s T ππ==== .. 2222max max max 1*(2**)*(2**)*350.56/x w x f x A cm s T ππ==== 2.一加速度计指示结构谐振在80HZ 时具有最大加速度50g,求振动的振幅。(g=10m/s2) 解:.. 22max max max *(2**)*x w x f x π== ..22max max /(2**)(50*10)/(2*3.14*80) 1.98x x f mm π=== 3.一简谐振动,频率为10Hz,最大速度为4、57m/s,求谐振动的振幅、周期、最大加速度。 解: .max max /(2**) 4.57/(2*3.14*10)72.77x x f mm π=== 110.110T s f = == .. 2max max max *2***2*3.14*10*4.57287.00/x w x f x m s π==== 4、 机械振动按激励输入类型分为哪几类?按自由度分为哪几类? 答:按激励输入类型分为自由振动、强迫振动、自激振动 按自由度分为单自由度系统、多自由度系统、连续系统振动
5、 什么就是线性振动?什么就是非 线性振动?其中哪种振动满足叠加原理? 答:描述系统的方程为线性微分方程的为线性振动系统,如00I mga θθ+= 描述系统的方程为非线性微分方程的为非线性振动系统0sin 0I mga θθ+= 线性系统满足线性叠加原理 6、 请画出同一方向的两个运动:1()2sin(4)x t t π=,2()4sin(4)x t t π=合成的的振动波形 7、请画出互相垂直的两个运动:1()2sin(4)x t t π=,2()2sin(4)x t t π=合成的结果。 如果就是1()2sin(4/2)x t t ππ=+,2()2sin(4)x t t π=
振动力学期末考试试题和答案 振动力学(试题) 2008 一、填空(每空2分) 1、设周期振动信号的周期为,则其傅里叶级数的展开的基频为,T ,,, 2、单自由度粘性阻尼系统的阻尼因子与阻尼系数的关系为,,, , 作用下系统响应的稳态振3、单自由度粘性阻尼系统在简谐力ptsin,0 动的幅值为,,, 4、粘性阻尼一周期内所消耗的能量与频率成,,,比。 5、无阻尼多自由度系统的主振型正交关系为,,,,,, 6、写出多自由度系统再频率域的输入与输出之间的关系,,,,, 7、写出瑞利商的表达式,,,,,, r8、多自由度系统中共存在个主固有频率,其相应的主振型,,, 正交。 9、无阻尼多自由度系统,利用里兹法计算出的主振型关于M、K是 否正交,,,,(答是或否) 10、写出如图T-1所示梁的左端边界条件,,,,,,,,,, y L x K 图T-1 二、(20分)系统如图T-2所示,杆AB为刚性、均质,长度为,总L 质量为,弹簧刚度为,阻尼系数为。求系统的固有频率及阻mck
尼因子。 图T-2 三、系统如图T-3所示。求系统的固有频率与主振型。 k k k k k m m m X X X 123 图T-3 四、 五、(20分)简支梁如图T-5所示,弹性模量为E,质量密度为,, 横截面积为A,截面惯性矩为J。求梁在中央受集中弯矩M下的响应。(假设梁的初始状态为零)
图T-5 答案 一、填空(每空2分) 1、周期振动信号的周期为,则其傅里叶级数的展开的基频为 T2/,T 2、单自由度粘性阻尼系统的阻尼因子与阻尼系数的关系为, c ,, 2mk 作用下系统响应的稳态振3、单自由度粘性阻尼系统在简谐力ptsin,0 p10动的幅值为 ,,B222k,,,,,(1)(2) 4、粘性阻尼一周期内所消耗的能量与频率成,正,比。 5、无阻尼多自由度系统的主振型正交关系为加权(M,K)正交: 0()ij,0()ij,,,TTTT ,,,,M,K,,,ijijMij(),Kij(),pipi,, 6、写出多自由度系统在频率域的输入与输出之间的关系 21,其中 xHP()()(),,,,HKMiC()(),,,,,, TXKX7、写出瑞利商的表达式 ()RX,TXMX r8、多自由度系统中共存在个重固有频率,其相应的主振型,,加 权(M,K)正交。 MK9、无阻尼多自由度系统,利用里兹法计算出的主振型关于、是
《机械振动》测试题(含答案)(1) 一、机械振动 选择题 1.如图所示,物块M 与m 叠放在一起,以O 为平衡位置,在ab 之间做简谐振动,两者始终保持相对静止,取向右为正方向,其振动的位移x 随时间t 的变化图像如图,则下列说法正确的是( ) A .在1~ 2 T t 时间内,物块m 的速度和所受摩擦力都沿负方向,且都在增大 B .从1t 时刻开始计时,接下来4 T 内,两物块通过的路程为A C .在某段时间内,两物块速度增大时,加速度可能增大,也可能减小 D .两物块运动到最大位移处时,若轻轻取走m ,则M 的振幅不变 2.下列说法中 不正确 的是( ) A .将单摆从地球赤道移到南(北)极,振动频率将变大 B .将单摆从地面移至距地面高度为地球半径的高度时,则其振动周期将变到原来的2倍 C .将单摆移至绕地球运转的人造卫星中,其振动频率将不变 D .在摆角很小的情况下,将单摆的振幅增大或减小,单摆的振动周期保持不变 3.如图所示,甲、乙两物块在两根相同的弹簧和一根张紧的细线作用下静止在光滑水平面上,已知甲的质量小于乙的质量.当细线突然断开斤两物块都开始做简谐运动,在运动过程中( ) A .甲的最大速度大于乙的最大速度 B .甲的最大速度小于乙的最大速度 C .甲的振幅大于乙的振幅 D .甲的振幅小于乙的振幅 4.甲、乙两单摆的振动图像如图所示,由图像可知 A .甲、乙两单摆的周期之比是3:2 B .甲、乙两单摆的摆长之比是2:3
C .t b 时刻甲、乙两摆球的速度相同 D .t a 时刻甲、乙两单摆的摆角不等 5.下列叙述中符合物理学史实的是( ) A .伽利略发现了单摆的周期公式 B .奥斯特发现了电流的磁效应 C .库仑通过扭秤实验得出了万有引力定律 D .牛顿通过斜面理想实验得出了维持运动不需要力的结论 6.如图所示,质量为m 的物块放置在质量为M 的木板上,木板与弹簧相连,它们一起在光滑水平面上做简谐振动,周期为T ,振动过程中m 、M 之间无相对运动,设弹簧的劲度系数为k 、物块和木板之间滑动摩擦因数为μ, A .若t 时刻和()t t +?时刻物块受到的摩擦力大小相等,方向相反,则t ?一定等于2 T 的整数倍 B .若2 T t ?= ,则在t 时刻和()t t +?时刻弹簧的长度一定相同 C .研究木板的运动,弹簧弹力充当了木板做简谐运动的回复力 D .当整体离开平衡位置的位移为x 时,物块与木板间的摩擦力大小等于 m kx m M + 7.如图所示,弹簧的一端固定,另一端与质量为2m 的物体B 相连,质量为1m 的物体A 放在B 上,212m m =.A 、B 两物体一起在光滑水平面上的N 、N '之间做简谐运动,运动过程中A 、B 之间无相对运动,O 是平衡位置.已知当两物体运动到N '时,弹簧的弹性势能为p E ,则它们由N '运动到O 的过程中,摩擦力对A 所做的功等于( ) A .p E B . 12 p E C .13 p E D . 14 p E 8.质点做简谐运动,其x —t 关系如图,以x 轴正向为速度v 的正方向,该质点的v —t 关系是( )
第1章传感器基础理论思考题与习题答案 1.1什么是传感器?(传感器定义) 解:能够感受规定的被测量并按照一定规律转换成可用输出信号的器件或装置,通常由敏感元件、转换元件和调节转换电路组成。 1.2传感器特性在检测系统中起到什么作用? 解:传感器的特性是指传感器的输入量和输出量之间的对应关系,所以它在检测系统中的作用非常重要。通常把传感器的特性分为两种:静态特性和动态特性。静态特性是指输入不随时间而变化的特性,它表示传感器在被测量各个值处于稳定状态下输入输出的关系。动态特性是指输入随时间而变化的特性,它表示传感器对随时间变化的输入量的响应特性。1.3传感器由哪几部分组成?说明各部分的作用。 解:传感器通常由敏感元件、转换元件和调节转换电路三部分组成。其中,敏感元件是指传感器中能直接感受或响应被测量的部分,转换元件是指传感器中能将敏感元件感受或响应的被测量转换成电信号的部分,调节转换电路是指将非适合电量进一步转换成适合电量的部分,如书中图1.1所示。 1.4传感器的性能参数反映了传感器的什么关系?静态参数有哪些?各种参数代表什么意义? 动态参数有那些?应如何选择? 解:在生产过程和科学实验中,要对各种各样的参数进行检测和控制,就要求传感器能感受被测非电量的变化并将其不失真地变换成相应的电量,这取决于传感器的基本特性,即输出—输入特性。衡量静态特性的重要指标是线性度、灵敏度,迟滞和重复性等。意义略(见书中)。动态参数有最大超调量、延迟时间、上升时间、响应时间等,应根据被测非电量的测量要求进行选择。 1.5某位移传感器,在输入量变化5mm时,输出电压变化为300mV,求其灵敏度。 解:其灵敏度 3 3 30010 60 510 U k X - - ?? === ?? 1.6某测量系统由传感器、放大器和记录仪组成,各环节的灵敏度为:S1=0.2mV/℃、S2
上海交通大学2008年振动力学期末考试试题 第一题(20分) 1、在图示振动系统中,已知:重物C的质量m1,匀质杆AB的质量m2,长为L,匀质轮O的质量m3,弹簧的刚度系数k。当AB杆处于水平时为系统的静平衡位置。试采用能量法求系统微振时的固有频率。 解: 系统可以简化成单自由度振动系统,以重物C的位移y作为系统的广义坐标,在静平衡位置时y=0,此时系统的势能为零。 AB转角: 系统动能: m1动能: m2动能: m3动能: 系统势能: 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而 有: 上式求导,得系统的微分方程为:
固有频率和周期为: 2、质量为m1的匀质圆盘置于粗糙水平面上,轮缘上绕有不可伸长的细绳并通过 定滑轮A连在质量为m2的物块B上;轮心C与刚度系数为k的水平弹簧相连;不计滑轮A,绳及弹簧的质量,系统自弹簧原长位置静止释放。试采用能量法求 系统的固有频率。 解:系统可以简化成单自由度振动系统,以重物B的位移x作为系统的广义坐标,在静平衡位置时x=0,此时系统的势能为零。 物体B动能: 轮子与地面接触点为速度瞬心,则轮心速度为,角速度为,转过的角度为。轮子动能: 系统势能: 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,有:上式求导得系统的运动微分方程:
固有频率为: 第二题(20分) 1、在图示振动系统中,重物质量为m,外壳质量为2m,每个弹簧的刚度系数均为k。设外壳只能沿铅垂方向运动。采用影响系数方法:(1)以x1和x2为广义坐标,建立系统的微分方程;(2)求系统的固有频率。 解: 系统为二自由度系统。 当x1=1,x2=0时,有:k11=2k,k21=-2k 当x2=1,x2=1时,有:k22=4k,k12=-2k 因此系统刚度矩阵为: 系统质量矩阵为: 系统动力学方程为: 频率方程为: 解出系统2个固有频率: ,
《机械振动》测试题(含答案) 一、机械振动选择题 1.如图所示,PQ为—竖直弹簧振子振动路径上的两点,振子经过P点时的加速度大小为6m/s2,方向指向Q点;当振子经过Q点时,加速度的大小为8m/s2,方向指向P点,若PQ之间的距离为14cm,已知振子的质量为lkg,则以下说法正确的是() A.振子经过P点时所受的合力比经过Q点时所受的合力大 B.该弹簧振子的平衡位置在P点正下方7cm处 C.振子经过P点时的速度比经过Q点时的速度大 D.该弹簧振子的振幅一定为8cm 2.某同学用单摆测当地的重力加速度.他测出了摆线长度L和摆动周期T,如图(a)所示.通过改变悬线长度L,测出对应的摆动周期T,获得多组T与L,再以T2为纵轴、L为横轴画出函数关系图像如图(b)所示.由此种方法得到的重力加速度值与测实际摆长得到的重力加速度值相比会() A.偏大B.偏小C.一样D.都有可能 3.下列说法中不正确的是( ) A.将单摆从地球赤道移到南(北)极,振动频率将变大 B.将单摆从地面移至距地面高度为地球半径的高度时,则其振动周期将变到原来的2倍C.将单摆移至绕地球运转的人造卫星中,其振动频率将不变 D.在摆角很小的情况下,将单摆的振幅增大或减小,单摆的振动周期保持不变 4.如图所示,一端固定于天花板上的一轻弹簧,下端悬挂了质量均为m的A、B两物体,平衡后剪断A、B间细线,此后A将做简谐运动。已知弹簧的劲度系数为k,则下列说法中正确的是()
A .细线剪断瞬间A 的加速度为0 B .A 运动到最高点时弹簧弹力为mg C .A 运动到最高点时,A 的加速度为g D .A 振动的振幅为 2mg k 5.如图所示,质量为m 的物块放置在质量为M 的木板上,木板与弹簧相连,它们一起在光滑水平面上做简谐振动,周期为T ,振动过程中m 、M 之间无相对运动,设弹簧的劲度系数为k 、物块和木板之间滑动摩擦因数为μ, A .若t 时刻和()t t +?时刻物块受到的摩擦力大小相等,方向相反,则t ?一定等于2 T 的整数倍 B .若2 T t ?= ,则在t 时刻和()t t +?时刻弹簧的长度一定相同 C .研究木板的运动,弹簧弹力充当了木板做简谐运动的回复力 D .当整体离开平衡位置的位移为x 时,物块与木板间的摩擦力大小等于 m kx m M + 6.如图所示,弹簧的一端固定,另一端与质量为2m 的物体B 相连,质量为1m 的物体A 放在B 上,212m m =.A 、B 两物体一起在光滑水平面上的N 、N '之间做简谐运动,运动过程中A 、B 之间无相对运动,O 是平衡位置.已知当两物体运动到N '时,弹簧的弹性势能为p E ,则它们由N '运动到O 的过程中,摩擦力对A 所做的功等于( ) A .p E B . 12 p E C .13 p E D . 14 p E 7.如图所示,将小球甲、乙、丙(都可视为质点)分别从A 、B 、C 三点由静止同时释放,最后都到达竖直面内圆弧的最低点D ,其中甲是从圆心A 出发做自由落体运动,乙沿弦轨道从一端B 到达最低点D ,丙沿圆弧轨道从C 点运动到D ,且C 点很靠近D 点,如果忽略一切摩擦阻力,那么下列判断正确的是( ) A .丙球最先到达D 点,乙球最后到达D 点
习题集及答案 第1章概述 什么是传感器?按照国标定义,“传感器”应该如何说明含义? 传感器由哪几部分组成?试述它们的作用及相互关系。 传感器如何分类?按传感器检测的范畴可分为哪几种? 答案 答: 从广义的角度来说,感知信号检出器件和信号处理部分总称为传感器。我们对传感器定义是:一种能把特定的信息(物理、化学、生物)按一定规律转换成某种可用信号输出的器件和装置。从狭义角度对传感器定义是:能把外界非电信息转换成电信号输出的器件。 我国国家标准(GB7665—87)对传感器(Sensor/transducer)的定义是:“能够感受规定的被测量并按照一定规律转换成可用输出信号的器件和装置”。定义表明传感器有这样三层含义:它是由敏感元件和转换元件构成的一种检测装置;能按一定规律将被测量转换成电信号输出;传感器的输出与输入之间存在确定的关系。按使用的场合不同传感器又称为变换器、换能器、探测器。 答: 组成——由敏感元件、转换元件、基本电路组成; 关系,作用——传感器处于研究对象与测试系统的接口位置,即检测与控制之首。传感器是感知、获取与检测信息的窗口,一切科学研究与自动化生产过程要获取的信息都要通过传感器获取并通过它转换成容易传输与处理的电信号,其作用与地位特别重要。 答:(略)答: 按照我国制定的传感器分类体系表,传感器分为物理量传感器、化学量传感器以及生物量传感器三大类,含12个小类。按传感器的检测对象可分为:力学量、热学量、流体量、光学量、电量、磁学量、声学量、化学量、生物量、机器人等等。 第3章电阻应变式传感器 何为电阻应变效应?怎样利用这种效应制成应变片? 图3-31为一直流电桥,负载电阻R L趋于无穷。图中E=4V,R1=R2=R3=R4=120Ω,试求:①R1为金属应变片,其余为外接电阻,当R1的增量为ΔR1=Ω时,电桥输出电压U0=? ② R1、R2为金属应变片,感应应变大小变化相同,其余为外接电阻,电桥输出电压U0=? ③ R1、R2为金属应变片,如果感应应变大小相反,且ΔR1=ΔR2 =Ω,电桥输出电压U0=? 答案 答: 导体在受到拉力或压力的外界力作用时,会产生机械变形,同时机械变形会引起导体阻值的变化,这种导体材料因变形而使其电阻值发生变化的现象称为电阻应变效应。 当外力作用时,导体的电阻率 、长度l、截面积S都会发生变化,从而引起电阻值R的变
2008年振动力学期末考试试题 大学期末考试https://www.doczj.com/doc/e217226648.html, 第一题(20分) 1、在图示振动系统中,已知:重物C的质量m1, 匀质杆AB的质量m2,长为L,匀质轮O的质量 m3,弹簧的刚度系数k。当AB杆处于水平时为 系统的静平衡位置。试采用能量法求系统微振 时的固有频率。 解: 系统可以简化成单自由度振动系统,以重物C的位移y作为系统的广义坐标,在静平衡位置时y=0,此时系统的势能为零。 AB转角: 系统动能: m1动能: m2动能: m3动能: 系统势能: 在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,因而有:
上式求导,得系统的微分方程为: 固有频率和周期为: 2、质量为m1的匀质圆盘置于粗糙水平面上,轮缘 上绕有不可伸长的细绳并通过定滑轮A连在质量 为m2的物块B上;轮心C与刚度系数为k的水平 弹簧相连;不计滑轮A,绳及弹簧的质量,系统自 弹簧原长位置静止释放。试采用能量法求系统的固 有频率。 解:系统可以简化成单自由度振动系统,以重物B的位移x作为系统的广义坐标,在静平衡位置时x=0,此时系统的势能为零。 物体B动能: 轮子与地面接触点为速度瞬心,则轮心速度为,角速度为,转过的角度为。轮子动能: 系统势能:
在理想约束的情况下,系统的主动力为有势力,则系统的机械能守恒,有: 上式求导得系统的运动微分方程: 固有频率为: 第二题(20分) 1、在图示振动系统中,重物质量为m,外壳质量为2m, 每个弹簧的刚度系数均为k。设外壳只能沿铅垂方向运 动。采用影响系数方法:(1)以x1和x2为广义坐标, 建立系统的微分方程;(2)求系统的固有频率。 解: 系统为二自由度系统。 当x1=1,x2=0时,有:k11=2k,k21=-2k 当x2=1,x2=1时,有:k22=4k,k12=-2k 因此系统刚度矩阵为: 系统质量矩阵为:
1、四个振动系统中,自由度为无限大的是()。 A. 单摆; B. 质量-弹簧; C. 匀质弹性杆; D. 无质量弹性梁; 2、两个分别为c1、c2的阻尼原件,并连后其等效阻尼是()。 A. c1+c2; B. c1c2/(c1+c2); C. c1-c2; D. c2-c1; 3、()的振动系统存在为0的固有频率。 A. 有未约束自由度; B. 自由度大于0; C. 自由度大于1; D. 自由度无限多; 4、多自由度振动系统中,质量矩阵元素的量纲应该是()。 A. 相同的,且都是质量; B. 相同的,且都是转动惯量; C. 相同的,且都是密度; D. 可以是不同的; 5、等幅简谐激励的单自由度弹簧-小阻尼-质量振动系统,激励频 率()固有频率时,稳态位移响应幅值最大。 A. 等于; B. 稍大于; C. 稍小于; D. 为0; 6、自由度为n的振动系统,且没有重合的固有频率,其固有频率
的数目(A )。 A. 为n; B. 为1; C. 大于n; D. 小于n; 7、无阻尼振动系统两个不同的振型u(r)和u(s),u(r)T Mu(s)的值一定 ()。 A. 大于0; B. 等于0; C. 小于0; D. 不能确定; 8、无阻尼振动系统的某振型u(r),u(r)T Ku(r)的值一定()。 A. 大于0; B. 等于0; C. 小于0; D. 不能确定; 9、如果简谐激励力作用在无约束振动系统的某集中质量上,当激 励频率为无限大时,该集中质量的稳态位移响应一定()。 A. 大于0; B. 等于0; C. 为无穷大; D. 为一常数值; 10、相邻固有频率之间的间隔呈近似无限等差数列的振动系统是 ()。 A. 杆的纵向振动; B. 弦的横向振动; C. 一般无限多自由度系统; D. 梁的横向振动; 11、两个刚度分别为k1、k2串连的弹簧,其等效刚度是()。 A. k1+k2; B. k1k2/(k1+k2);