第二版06.2008 Edition
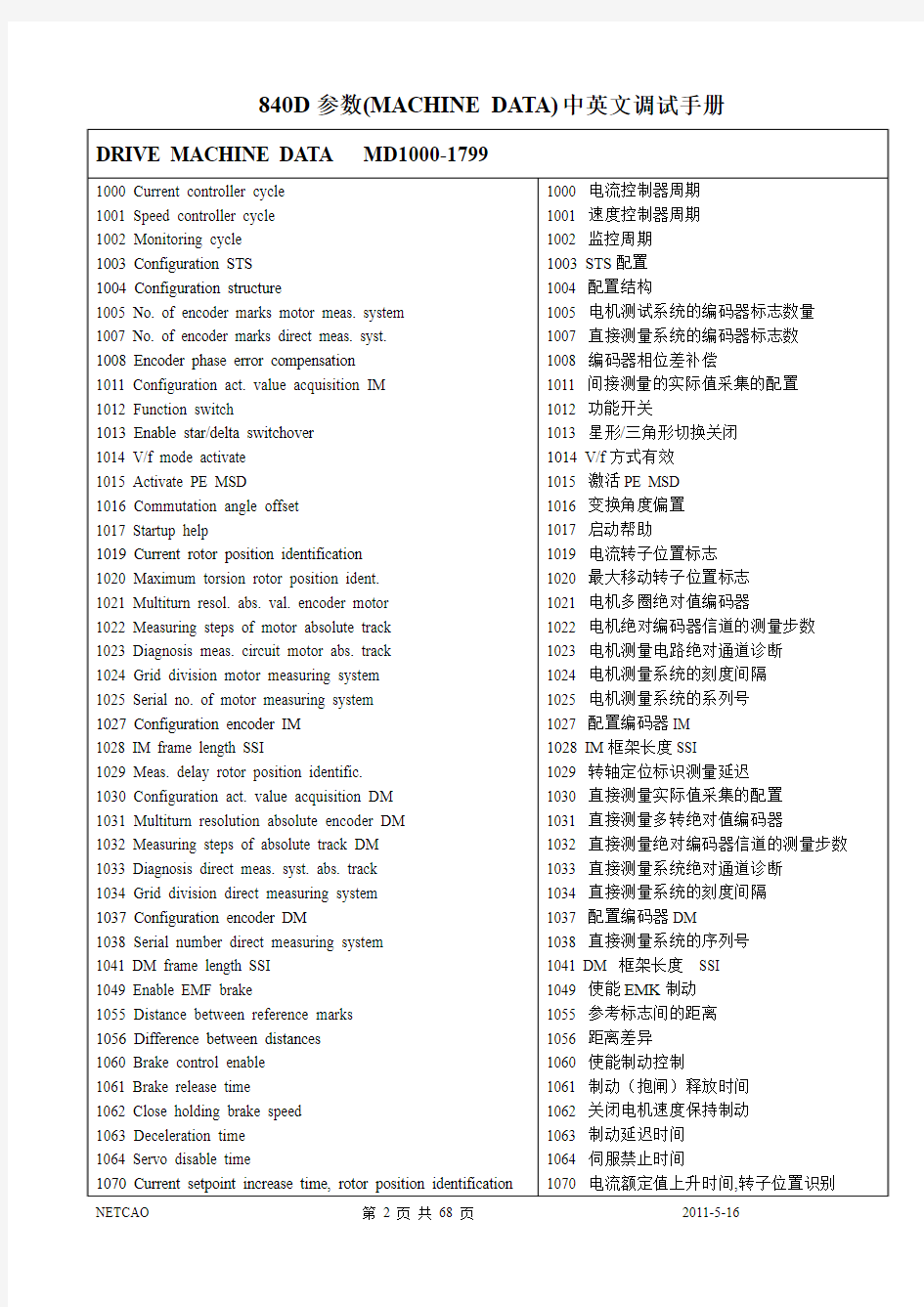
840D参数(MACHINE DATA)中英文调试手册DRIVE MACHINE DATA MD1000-1799
1000 Current controller cycle
1001 Speed controller cycle
1002 Monitoring cycle
1003 Configuration STS
1004 Configuration structure
1005 No. of encoder marks motor meas. system
1007 No. of encoder marks direct meas. syst.
1008 Encoder phase error compensation
1011 Configuration act. value acquisition IM
1012 Function switch
1013 Enable star/delta switchover
1014 V/f mode activate
1015 Activate PE MSD
1016 Commutation angle offset
1017 Startup help
1019 Current rotor position identification
1020 Maximum torsion rotor position ident.
1021 Multiturn resol. abs. val. encoder motor
1022 Measuring steps of motor absolute track
1023 Diagnosis meas. circuit motor abs. track
1024 Grid division motor measuring system
1025 Serial no. of motor measuring system
1027 Configuration encoder IM
1028 IM frame length SSI
1029 Meas. delay rotor position identific.
1030 Configuration act. value acquisition DM
1031 Multiturn resolution absolute encoder DM
1032 Measuring steps of absolute track DM
1033 Diagnosis direct meas. syst. abs. track
1034 Grid division direct measuring system
1037 Configuration encoder DM
1038 Serial number direct measuring system
1041 DM frame length SSI
1049 Enable EMF brake
1055 Distance between reference marks
1056 Difference between distances
1060 Brake control enable
1061 Brake release time
1062 Close holding brake speed
1063 Deceleration time
1064 Servo disable time
1070 Current setpoint increase time, rotor position identification 1000 电流控制器周期
1001 速度控制器周期
1002 监控周期
1003 STS配置
1004 配置结构
1005 电机测试系统的编码器标志数量1007 直接测量系统的编码器标志数
1008 编码器相位差补偿
1011 间接测量的实际值采集的配置
1012 功能开关
1013 星形/三角形切换关闭
1014 V/f方式有效
1015 激活PE MSD
1016 变换角度偏置
1017 启动帮助
1019 电流转子位置标志
1020 最大移动转子位置标志
1021 电机多圈绝对值编码器
1022 电机绝对编码器信道的测量步数1023 电机测量电路绝对通道诊断
1024 电机测量系统的刻度间隔
1025 电机测量系统的系列号
1027 配置编码器IM
1028 IM框架长度SSI
1029 转轴定位标识测量延迟
1030 直接测量实际值采集的配置
1031 直接测量多转绝对值编码器
1032 直接测量绝对编码器信道的测量步数1033 直接测量系统绝对通道诊断
1034 直接测量系统的刻度间隔
1037 配置编码器DM
1038 直接测量系统的序列号
1041 DM 框架长度 SSI
1049 使能EMK制动
1055 参考标志间的距离
1056 距离差异
1060 使能制动控制
1061 制动(抱闸)释放时间
1062 关闭电机速度保持制动
1063 制动延迟时间
1064 伺服禁止时间
1070 电流额定值上升时间,转子位置识别
1071 Waiting time, rotor position identification
1072 Number of measurements, rotor position identification 1073 Permissible torsion rotor position ident.
1074 Rotor position adjustment
1075 Traverse rotor position identification
1076 Factor 'load moment of inertia'
1077 Reset time RP-ID controller
1078 Max. rotor position ident. time
1096 Red. max. torque active with gen. stop
1097 Red. max. torque with gen. stop
1098 Power section derating limit current
1099 Power sect. limit current derating factor
1100 Frequency pulse width modulation
1101 Computation deadtime curr. control loop
1102 Motor code number
1103 Motor rated current
1104 Maximum motor current
1105 Reduction of maximum motor current
1106 Power section code number
1107 Limit current transistor
1108 Limit current power unit
1111 Rated current power section
1112 Number of pole pairs motor
1113 Torque constant
1114 V oltage constant
1115 Armature resistance
1116 Armature inductance
1117 Motor moment of inertia
1118 Motor zero-speed current
1120 P gain current controller
1121 Reset time current controller
1122 Motor limit current
1124 Symmetr. reference model current control
1125 Booting time 1 with V/f mode
1126 Booting time 2 with V/f mode
1128 Optimum load angle
1136 Motor zero-speed current
1142 Threshold speed field weakening
1145 Breakdown torque reduction factor
1146 Motor maximum speed
1147 Speed limitation
1149 Reluctance torque constant
1150 Flux controller P-gain
1151 Flux controller reset time
1159 Correction flow model
1161 DC link fixed voltage 1071 等待时间,转子位置识别1072 测量次数,转子位置识别1073 允许的转子位置识别
1074 转子位置匹配
1075 移动转子位置证明
1076 负载尺寸系数
1077 复位时间 RP-ID 控制器1078 转子位置确认最长时间
1096 准停激活时缩减最大力矩1097 准停时缩减最大力矩
1098 PS 下降限制电流
1099 PS 限制电流下降因素
1100 频率脉宽调制
1101 电流控制回路的计算死区时间1102 电机代码
1103 额定电机电流
1104 最大电机电流
1105 减小最大电机电流
1106 功率部分代码
1107 晶体管的限定电流
1108 功率单元的限定电流
1111 功率部分的额定电流
1112 电机极对数
1113 力常数
1114 电压常数
1115 电枢电阻
1116 电枢感应系数
1117 电机尺寸
1118 电机零速度电流
1120 电流控制器的P增益
1121 电流控制器复位时间
1122 电机限定电流
1124 对称参考模式电流控制
1125 V/f 模式的启动时间1
1126 V/f 模式的启动时间2
1128 在合适的负载角度
1136 电机零速度电流
1142 速度弱磁阀值
1145 故障力矩削减系数
1146 电机最大速度
1147 速度极限
1149 扭矩常量
1150 磁通控制器的P增益
1151 磁通控制器复位时间
1159 流动模型修正
1161 直流母线的固定电压
1162 Minimum DC link voltage
1163 Maximum DC link voltage
1164 DC link voltage monitoring from motor speed only 1165 Dyn. power management active
1166 Ground fault detection active
1167 Response threshold for ground fault detection 1168 Maximum twisting for ground fault detection 1169 Diagnostics Motor
1170 Pole pair width
1175 Limit current power section ASYN
1176 Limit current power section S6 ASYN
1177 Rated current power section ASYN
1178 Power section derating SYN
1179 Power section derating ASYN
1180 Lower current limit adaptation
1181 Upper current limit adaptation
1182 Factor current controller adaption
1183 Current controller adaptation on
1190 Evaluation torque limiting value
1191 Servo limit torque adjustment
1192 Weight torque
1193 Counterweight at Stop C
1200 Number of current setpoint filters
1201 Type of current setpoint filter
1202 Natural frequ. setpoint current filter 1
1203 Damping setpoint current filter 1
1204 Natural frequ. setpoint current filter 2
1205 Damping setpoint current filter 2
1206 Natural frequ. setpoint current filter 3
1207 Damping setpoint current filter 3
1208 Natural frequ. setpoint current filter 4
1209 Damping setpoint current filter 4
1210 Blocking frequ. setpoint current filter1
1211 Bandwidth setpoint current filter 1
1212 Bandwidth counter setpoint curr. filter1
1213 Blocking frequ. setpoint current filter2
1214 Bandwidth setpoint current filter 2
1215 Bandwidth counter setpoint curr. filter2
1216 Blocking frequ. setpoint current filter3
1217 Bandwidth setpoint current filter 3
1218 Bandwidth counter setpoint curr. filter3
1219 Blocking frequ. setpoint current filter4
1220 Bandwidth setpoint current filter 4
1221 Bandwidth counter setpoint curr. filter4
1222 BSF nat. freq., current setpoint freq. 1
1223 BSF nat. freq., current setpoint freq. 2 1162 最小直流母线电压
1163 最大直流母线电压
1164 自电机速度起只进行直流母线电压监控1165 动态能量管理激活
1166 当前接地识别
1167 用于接地识别的响应阈值
1168 接地识别的最大运动
1169 电机诊断
1170 极对的宽度
1175 限制电流源部分 ASYN
1176 限制电流源部分 S6 ASYN
1177 额定电流源部分 ASYN
1178 电源部分下降 SYN
1179 电源部分下降 ASYN
1180 电流下限调整
1181 电流上限调整
1182 电流控制器匹配系数
1183 电流控制器匹配
1190 检测力矩限定值
1191 伺服限定扭矩的调整
1192 重量
1193 停止C时的配重
1200 电流设定的滤波器数量
1201 电流设定滤波器类型
1202 电流设定滤波器1自然频率
1203 电流设定滤波器1的阻尼
1204 电流设定点滤波器2自然频率
1205 电流设定滤波器2的阻尼
1206 电流设定点滤波器3自然频率
1207 电流设定滤波器3的阻尼
1208 电流设定点滤波器4自然频率
1209 速度设定滤波器4的阻尼
1210 电流设定滤波器1截止频率
1211 电流设定滤波器1带宽
1212 电流设定滤波器1的脉宽计数器
1213 电流设定滤波器2截止频率
1214 电流设定滤波器2带宽
1215 电流设定滤波器2的脉宽计数器
1216 电流设定滤波器3截止频率
1217 电流设定滤波器3带宽
1218 电流设定滤波器3的脉宽计数器
1219 电流设定滤波器4截止频率
1220 电流设定滤波器4带宽
1221 电流设定滤波器4的脉宽计数器
1222 BSP自然频率,电流设定频率1
1223 BSP自然频率,电流设定频率2
1224 BSF nat. freq., current setpoint freq. 3
1225 BSF nat. freq., current setpoint freq. 4
1230 1st torque limiting value
1231 2nd torque limiting value
1232 Operating speed from MD1230 to MD1231
1233 Generative limitation
1234 Hysteresis MD 1232
1235 1st power limit value
1236 2nd power limit value
1237 Generative maximum output
1239 Torque limit setup mode
1245 Threshold speed dep. Mset smoothing
1246 Hysteresis speed dep. Mset smoothing
1247 Speed threshold 1 motor switchover
1248 Speed threshold 2 motor switchover
1250 Frequ. limit act. val. current smoothing
1251 Time constant utilization smoothing
1252 Frequ. limit setpoint torque smoothing
1254 Time constant current monitoring
1260 I2t limitation limit current pow. sec. S6
1261 I2t limitation nominal current pow. sec.
1262 I2t time limited
1263 I2t current limitation factor
1264 I2t current utilization factor
1265 Thermal motor protection
1266 Thermal motor load
1267 Therm. motor capacity utilization warning threshold 1268 Winding time constant
1272 Natural frequ. setpoint current filter 5
1273 Damping setpoint current filter 5
1274 Blocking frequ. setpoint current filter 5
1275 Bandwidth setpoint current filter 5
1276 Bandwidth counter setpoint curr. filter 5
1277 BSF nat. freq., current setpoint freq. 5
1278 Natural frequ. setpoint current filter 6
1279 Damping setpoint current filter 6
1280 Blocking frequ. setpoint current filter 6
1281 Bandwidth setpoint current filter 6
1282 Bandwidth counter setpoint curr. filter 6
1283 BSF nat. freq., current setpoint freq. 6
1300 SI monitoring cycle
1301 Enable safe functions
1302 Axis-spec. bits safe functions
1305 Actual value range for SN with rot.axes
1316 Motor encoder conf. safe functions
1317 Graduations on linear scale 1224 BSP自然频率,电流设定频率3 1225 BSP自然频率,电流设定频率4 1230 第一功率限定值
1231 第二功率限定值
1232 MD1230到MD1231的操作速度1233 再生限定
1234 磁滞 MD 1232
1235 第一功率限定值
1236 第二功率限定值
1237 再生的最大输出
1239 调整方式力限定
1245 取决于速度Fset的阀值
1246 F集平滑磁滞速度
1247 电机切换的速度阀值1
1248 电机切换的速度阀值2
1250 光滑频率限制电流设定
1251 光滑使用的时间常数
1252 光滑频率限制力设定
1254 电流检测的时间常数
1260 12t限制限定电流功率部分S6 1261 I2t限制额定电流功率部分1262 I2t时间限制
1263 I2t当前限制系数
1264 I2t当前利用系数
1265 热电机保护
1266 热电机负载
1267 电机热负载警告阈值
1268 绕组时间常数
1272 电流设定滤波器5自然频率1273 电流设定滤波器5的阻尼
1274 电流设定滤波器5截止频率1275 电流设定滤波器5带宽
1276 电流设定滤波器5的脉宽计数器1277 BSP自然频率,电流设定频率5 1278 电流设定滤波器6然频率
1279 电流设定滤波器6的阻尼
1280 电流设定滤波器6截止频率1281 电流设定滤波器6带宽
1282 电流设定滤波器6的脉宽计数器1283 BSP自然频率,电流设定频率6 1300 安全集成检测周期
1301 安全功能的使能
1302 安全功能的特定轴控制位
1305 旋转轴SN的实际值范围
1316 用于安全功能的电机编码器配置1317 光栅刻度
1318 Encoder markings per revolution
1320 Lead screw pitch
1321 Denominator of gearbox encoder/load
1322 Counter of gearbox encoder/load
1326 Encoder limit frequency
1330 Zero-speed tolerance(SBH)
1331 Limit values for SG (SAFE VELOCITY) 1332 Correction factor for SG (SAFE VELOCITY) 1334 Upper limit value for SAFE SW LIMIT SW 1335 Lower limit value for SE
1336 Plus cam position SN (SAFE CAMS)
1337 Minus cam position SN (SAFE CAMS) 1340 Tolerance for safe cams
1342 Actual value tolerance cross comparison 1344 Actual value tolerance safe axis pos.
1346 Speed limit nx
1348 Tolerance actual velocity for SBR
1349 Tolerance 2 encoder drift / slip
1350 Tolerance time for safe input switchover 1351 Delay time SG switchover
1352 Transition time from STOP C to SBH
1353 Transition time from STOP D to SBH
1354 Transition time from STOP E to SBH
1355 Transition time from STOP F to STOP B 1356 Delay time pulse suppression
1357 Time for checking pulse suppression
1358 SI acceptance test Timer
1360 Creep speed pulse suppression
1361 Stop response with SG (SAFE VELOCITY) 1362 Stop response with SE (SW LIMIT SWITCH) 1363 Stop response SG-specific
1370 SI acceptance test Mode
1371 SI acceptance test Status
1380 Time until pulse suppression
1390 Safety Integrated Firmware Version
1391 Diagnosis: NC result list 1
1392 Diagnosis: 611D result list 1
1393 Diagnosis: NC result list 2
1394 Diagnosis: 611D result list 2
1395 Diagnosis for STOP F
1396 User acknowledge
1397 611D internal enable
1398 Display of SI-MD checksum
1399 Checksum of SI-MD
1400 Rated motor speed
1401 Speed for max. motor operational speed 1318 每转的编码器标志
1320 丝杠螺距
1321 变速箱编码器比负载的分母
1322 变速箱编码器/负载的计数器1326 编码器限定频率
1330 零速容差(SBH)
1331 SG的限定值
1332 SG的校正系数
1334 SE的高端限定值
1335 SE低限数值
1336 SN正凸轮位置
1337 SN的凸轮负方向
1340 安全凸轮公差
1342 交叉补偿的实际值公差
1344 安全轴位置的实际值容差
1346 速度限制nx
1348 SBR实际速度公差
1349 允差2编码器漂移/空走
1350 安全输入切换时间公差
1351 SG切换的延迟时间
1352 STOP C类停止到SBH的过渡时间1353 STOP D类停止到SBH的过渡时间1354 STOP E类停止到SBH的过渡时间1355 从停止F到停止B的过渡时间1356 脉冲禁止的延迟时间
1357 检查脉冲抑制的时间
1358 SI接受测试定时器
1360 爬行速度的脉冲抑制
1361 SG的停止响应
1362 SE的停止响应
1363 SG指定停机响应
1370 SI接受测试模式
1371 SI接受测试状态
1380 到脉冲禁止的时间
1390 固日期
1391 诊断:NC诊断结果清单1
1392 诊断:611D诊断结果清单1 1393 诊断:NC诊断结果清单2
1394 诊断:611D诊断结果清单2 1395 STOP F(停止功能)诊断
1396 用户确认
1397 611D 内部使能
1398 SI-MD校验和的显示
1399 SI-MD的校验和
1400 额定电机速度
1401 最大电机利用率速度值
1403 Creep speed pulse suppression
1404 Timer pulse suppression
1405 Monitoring speed motor
1406 Type of speed controller
1407 P gain speed controller
1408 P gain upper adaptation speed
1409 Reset time speed controller
1410 Reset time without adaptation speed
1411 Lower adaptation speed
1412 Upper adaptation speed
1413 Select adaptation speed controller
1414 Natural frequency ref.model speed
1415 Damping reference model speed
1416 Symmetrizing reference model speed 1417 nx for 'nact < nx' message
1418 nmin for 'nact < nmin' message
1420 Maximum motor speed in setup mode 1421 Time constant integrator
1424 Symmetr. speed feedforward control chan. 1425 Symmetr. computation deadtime I-contr. 1426 Tolerance band for 'nset = nact' message 1427 Delay time 'nset=nact' message
1428 Threshold torque of Mdx
1429 Delay time 'Md < Mdx' message
1466 Switchover speed control/AM control 1500 Number of speed setpoint filters
1501 Type of speed setpoint filter
1502 Time constant setpoint speed filter 1 1503 Time constant setpoint speed filter 2 1506 Natural frequ. setpoint speed filter 1
1507 Damping setpoint speed filter 1
1508 Natural frequ. setpoint speed filter 2
1509 Damping setpoint speed filter 2
1514 Blocking frequ. setpoint speed filter 1 1515 Bandwidth - setpoint speed filter 1
1516 Bandwidth counter setpoint speed filter1 1517 Blocking frequ. setpoint speed filter 2 1518 Bandwidth - setpoint speed filter 2
1519 Bandwidth counter setpoint speed filter2 1520 BSF nat. freq. speed setpoint control 1 1521 BSF nat. freq. speed setpoint control 2 1522 Time constant actual speed value filter 1523 Time constant actual speed value filter RLI 1550 Reference value f. accel. sensor f. 1V 1560 Acceleration analysis mode
1561 Accel. sensor f. resolution bits 1403 爬行速度的脉冲抑制
1404 脉冲抑制计时器
1405 监控电机速度
1406 速度控制器的类型
1407 速度控制器的P增益
1408 高端适配速度的P增益
1409 速度控制器复位时间
1410 高端适配速度复位时间
1411 低适配速度
1412 高端适配速度
1413 选择速度控制器适配系数
1414 参考模型速度自然频率
1415 参考模型速度阻尼
1416 对称参考模式速度
1417 "vact 1418 ''vact 1421 积分器时间常数 1424 对称速度前馈控制通道 1425 对称计算死区时间I控制器1426 'vset=vact'信息的公差带 1427 "vset=vact"信息的延时时间1428 临界力Fdx以下 1429 'Fd 1466 AM开环/闭环控制的切换速度1500 速度设定编码器的数量 1501 速度设定滤波器类型 1502 速度设定滤波器1的时间常数1503 速度设定滤波器2的时间常数1506 自然频率速度设定滤波器1 1507 速度设定滤波器1的阻尼 1508 自然频率速度设定滤波器2 1509 速度设定滤波器2的阻尼 1514 速度设定滤波器1截止频率1515 速度设定滤波器1带宽 1516 速度设定滤波器1的时间常数1517 速度设定滤波器2截止频率1518 速度设定滤波器2带宽 1519 速度设定滤波器2的时间常数1520 BSP自然频率速度设定滤波1 1521 BSP自然频率速度设定滤波2 1522 速度实际值滤波器的时间常数1523 时间恒定速度实际值滤波器RLI 1550 加速度传感器f. 1V的参考值1560 加速度分析模式 1561 加速度传感器分辨率位 1562 Speed ratio motor to DM 1563 Time constant of acceleration high pass 1564 Derivative-action time f. load speed cont. 1565 P gain for load speed controller 1566 Load speed controller limitation 1567 Lead time f. load speed controller 2 1569 Sub-sampling acceleration filter 1570 Acceleration filter type 1571 Time constant for acceleration filter 1 1572 Natur. frequ. of denom. f. accel. filter 1 1573 Attenuation of denom. f. accel. filter 1 1574 Natur. frequ. of denom. f. accel. filter 1 1575 Attenuation of denom. f. accel. filter 1 1576 Time constant for acceleration filter 2 1577 Natur. frequ. of denom. f. accel. filter 2 1578 Attenuation of denom. f. accel. filter 2 1579 Natur. frequ. of denom. f. accel. filter 2 1580 Attenuation of denom. f. accel. filter 2 1581 Natur. frequ. of denom. f. accel. filter 3 1582 Attenuation of denom. f. accel. filter 3 1583 Natur. freq. of numer. f. accel. filter 3 1584 Attenuation of numer. f. accel. filter 3 1585 Time constant for acceleration filter 4 1586 Natur. frequ. of denom. f. accel. filter 4 1587 Attenuation of denom. f. accel. filter 4 1588 Natur. frequ. of denom. f. accel. filter 4 1589 Attenuation of denom. f. accel. filter 4 1590 Time constant for acceleration filter 5 1591 Natur. frequ. of denom. f. accel. filter 5 1592 Attenuation of denom. f. accel. filter 5 1593 Natur. frequ. of denom. f. accel. filter 5 1594 Attenuation of denom. f. accel. filter 5 1600 Concealable alarms (Power On) 1601 Concealable alarms (Reset) 1602 Motor temperature warning threshold 1603 Timer motor temperature alarm 1604 DC link undervoltage warning threshold 1605 Timer n-controller at fixed stop 1606 Threshold n-controller at stop 1607 Switchoff limit motor temperature 1608 Fixed temperature 1610 Diagnosis functions 1611 Response threshold dn/dt 1612 Configured shutdown response PO alarms 1613 Configured shutdown response RESET alarm 1615 Rotational accuracy monitoring toler. 1562 电机到DM的转换率 1563 恒加速度滤波 1564 负载速度控制器的保持时间 1565 负载速度控制器P增益 1566 负载速度控制器限制 1567 负载速度控制器2的提前时间1569 加速度滤波器次级取样 1570 加速度滤波器类型 1571 加速度滤波器1的时间常数 1572 加速度滤波器1的自然频率分母1573 加速度滤波器1的衰减分母 1574 加速度滤波器1的记数器自然频率1575 加速度滤波器1的记数器衰减1576 加速度滤波器2的时间常数 1577 加速度滤波器2的自然频率分母1578 加速度滤波器2的分母衰减 1579 加速度滤波器2的记数器自然频率1580 加速度滤波器2的记数器衰减1581 加速度滤波器3的自然频率分母1582 加速度滤波器3的的分母衰减1583 加速度滤波器3的记数器自然频率1584 加速度滤波器3的记数器衰减1585 加速度滤波器4的时间常数 1586 加速度滤波器4的分母自然频率1587 加速度滤波器4的分母衰减 1588 加速度滤波器4的记数器自然频率1589 加速度滤波器4的记数器衰减1590 加速度滤波器5的时间常数 1591 加速度滤波器5的分母自然频率1592 加速度滤波器5的分母衰减 1593 加速度滤波器5的记数器自然频率1594 加速度滤波器5的记数器衰减1600 隐含的报警(上电) 1601 隐含的报警(复位) 1602 电机温度警告阀值 1603 电机温度报警计时器 1604 直流欠电压的报警阀值 1605 定点停的n控制器的计时器 1606 停止时速度控制器的阀值 1607 关断电机极限温度 1608 固定温度 1610 诊断功能 1611 响应阀值 dn/dt 1612 已经配置的PO报警的停机响应1613 已经配置的RESET复位报警的响应1615 旋转精度监控公差 1620 Bits variable message function 1621 Signal number variable message function 1622 Address variable message function 1623 Threshold for variable message function 1624 Hysteresis variable message function 1625 ON-delay variable message function 1626 Delayed dropout variable message funct. 1630 Response threshold DC-link monitor. only 1631 Response voltage generator axis 1632 V oltage step for generator control 1633 Cutout threshold generative mode 1634 Response threshold emergency retraction 1635 Minimum speed generator axis 1636 Emergency retract mode/generat.mode 1637 Delay time regenerative braking 1638 Emergency retraction time 1639 Emergency retraction speed 1650 Diagnosis control 1651 Signal number min/max memory 1652 Memory location min/max memory 1653 Minimum value min/max memory 1654 Maximum value min/max memory 1655 Segment memory location monitor 1656 Address memory location monitor 1657 Value display monitor 1658 Value input monitor 1659 Value acceptance monitor 1660 Motor frequency V/f operation 1661 V/f ratio in V/f operation 1662 Change of motor frequency V/f operation 1665 Time factor IPO/NREG cycle for RFG 1700 Status of binary inputs 1701 DC link voltage 1702 Motor temperature 1703 Lead time conversion motor meas. system 1704 Lead time conversion DM 1705 V oltage setpoint (r.m.s.) 1706 Speed setpoint 1707 Speed actual value 1708 Smoothed current actual value 1709 Significance voltage representation 1710 Significance current representation 1711 Significance speed representation 1712 Significance rotor flux representation 1713 Significance torque representation 1714 Significance rotor flux representation 1620 位变量信息功能 1621 变量信息功能的信号数 1622 地址变量信息功能 1623 变量信息功能的阀值 1624 磁滞变量信息功能 1625 变量信息功能的上电延时 1626 变量下限功能延时退出 1630 直流母线监控的响应阀值 1631 发电轴的响应 1632 发电控制电压阶段 1633 再生方式切断阀值 1634 紧急回退的响应阀值 1635 产生最小速度的轴 1636 紧急回退方式/再生方式 1637 再生制动延迟时间 1638 紧急回退时间 1639 紧急回退速度 1650 诊断控制 1651 信号数最小/最大内存 1652 最小/最大内存内存位置 1653 最小/最大内存的最小值 1654 最小/最大内存的最大值 1655 内存分段位置的监控 1656 地址内存位置监控 1657 数值显示监控 1658 数值输入监控 1659 数值接受监控 1660 U/F操作的电机频率 1661 U/F操作的U/F比值 1662 电机频率U/F操作的改变 1665 RFG的IPO/NREG周期的时间系数1700 二进值输入的状态 1701 直流母线电压 1702 电机温度 1703 电机测量系统引导时间转换 1704 直接测量转换引导时间转换 1705 电压设定(有效的) 1706 速度设定值 1707 速度实际值 1708 平稳的当前实际值 1709 电压显示的有效位数 1710 电流显示的有效位数 1711 速度表示权值 1712 转子磁通表示的权值 1713 力表示权值 1714 转子磁通表示的权值 1719 Current absolute actual value (r.m.s.) 1720 CRC diagnosis parameter 1721 Diagnosis actual speed value 1722 Capacity utilization 1723 Diagnosis of start-up time 1724 Diagnosis of rotational accuracy monitor 1725 Scaling torque setpoint interface 1728 Torque setpoint 1729 Current rotor position (electr.) 1730 Display of operating mode 1731 Image ZK1_PO register 1732 Image ZK1_RES register 1733 NPFK diagnosis counter 1734 Diagnosis rotor position identification 1735 Processor utilization 1736 Test rotor position identification 1737 Difference rotor position identif. 1790 Meas. circuit type indirect meas. system 1791 Meas. circuit type direct meas. system 1796 HW_VERSION 1797 Data version 1798 Firmware date 1799 Version of firmware 1719 绝对电流实际值( r.m.s) 1720 CRC诊断参数 1721 实际速度值诊断 1722 负载 1723 启动时间诊断 1724 旋转精度监控诊断 1725 常态力设定的插入 1728 设定力矩 1729 电流回转轴位置(电子) 1730 操作方式的显示 1731 图形 ZK1_PO 寄存器 1732 图形 ZK1_RES 寄存器 1733 NPFK诊断计数器 1734 诊断转子位置标志 1735 处理器利用率 1736 测试转子位置识别 1737 不同转子位置标志 1790 间接测量系统的测量电路类型1791 直接测量系统的测量电路类型1796 HW版本 1797 数据版本 1798 硬件日期 1799 硬件版本 2005 No. of encoder marks motor meas. system 2015 Activate PE MSD 2016 Commutation angle offset 2019 Current rotor position identification 2020 Maximum torsion rotor position ident. 2060 Enable brake control 2061 Brake release time 2062 Close holding brake speed 2063 Deceleration time 2064 Servo disable time 2070 Current setpoint increase time, rotor position identification 2071 Waiting time, rotor position identification 2072 Number of measurements, rotor position identification 2073 Permissible torsion rotor position ident. 2074 Rotor position adjustment 2075 Traverse rotor position identification 2076 Factor 'load moment of inertia' 2077 Reset time RP-ID controller 2098 Power section derating limit current 2099 Power sect. limit current derating factor 2100 Frequency pulse width modulation 2005 电机测量系统的编码器标志数2015 激活PE MSD 2016 变换角度偏置 2019 电流转子位置标志 2020 最大移动转子位置标志 2060 使能制动控制 2061 制动(抱闸)释放时间 2062 关闭电机速度保持制动 2063 制动延迟时间 2064 伺服禁止时间 2070 电流额定值上升时间,转子位置识别2071 等待时间,转子位置识别 2072 测量次数,转子位置识别 2073 允许的转子位置识别 2074 转子位置匹配 2075 移动转子位置证明 2076 负载尺寸系数 2077 复位时间 RP-ID 控制器 2098 PS 下降限制电流 2099 PS 限制电流下降因素 2100 频率脉宽调制 2102 Motor code number 2103 Motor rated current 2104 Maximum motor current 2105 Reduction of maximum motor current 2112 Number of pole pairs motor 2113 Torque constant 2114 V oltage constant 2115 Armature resistance 2116 Armature inductance 2117 Motor moment of inertia 2118 Motor zero-speed current 2120 P gain current controller 2121 Reset time current controller 2122 Motor limit current 2125 Booting time 1 with V/f mode 2126 Booting time 2 with V/f mode 2128 Optimum load angle 2136 Motor zero-speed current 2142 Threshold speed field weakening 2145 Breakdown torque reduction factor 2146 Motor maximum speed 2147 Speed limitation 2149 Reluctance torque constant 2150 P gain flux controller 2151 Reset time flux controller 2159 Flowchart offset 2167 Response threshold for ground fault detection 2168 Maximum twisting for ground fault detection 2170 Pole pair width 2180 Lower current limit adaptation 2181 Upper current limit adaptation 2182 Factor current controller adaption 2183 Current controller adaptation on 2190 Evaluation torque limiting value 2192 Weight torque 2230 1st torque limiting value 2231 2nd torque limiting value 2232 Operating speed from MD1230 to MD1231 2233 Generative limitation 2234 Hysteresis MD 1232 2235 1st power limit value 2236 2nd power limit value 2239 Torque limit setup mode 2245 Threshold speed dep. Mset smoothing 2246 Hysteresis speed dep. Mset smoothing 2265 Thermal motor protection 2102 电机代码 2103 额定电机电流 2104 最大电机电流 2105 减小最大电机电流 2112 电机极对数 2113 力常数 2114 电压常数 2115 电枢电阻 2116 电枢感应系数 2117 电机尺寸 2118 电机零速度电流 2120 电流控制器的P增益 2121 电流控制器复位时间 2122 电机限定电流 2125 V/f 模式的启动时间1 2126 V/f 模式的启动时间2 2128 在合适的负载角度 2136 电机零速度电流 2142 速度弱磁阀值 2145 故障力矩削减系数 2146 电机最大速度 2147 速度极限 2149 扭矩常量 2150 磁通控制器的P增益 2151 磁通控制器复位时间 2159 流程图修正 2167 用于接地识别的响应阈值2168 接地识别的最大运动 2170 极对的宽度 2180 电流下限调整 2181 电流上限调整 2182 电流控制器匹配系数 2183 电流控制器匹配 2190 检测力矩限定值 2192 重量 2230 第一功率限定值 2231 第二功率限定值 2232 MD1230到MD1231的操作速度2233 再生限定 2234 磁滞 MD 1232 2235 第一功率限定值 2236 第二功率限定值 2239 调整方式力限定 2245 取决于速度Fset的阀值 2246 F集平滑磁滞速度 2265 热电机保护 2266 Thermal motor load 2267 Therm. motor capacity utilization warning threshold 2268 Winding time constant 2400 Rated motor speed 2401 Speed for max. motor operational speed 2403 Creep speed for pulse suppression 2404 Timer pulse suppression 2405 Monitoring speed motor 2407 P gain speed controller 2408 P gain upper adaptation speed 2409 Reset time speed controller 2410 Reset time without adaptation speed 2411 Lower adaptation speed 2412 Upper adaptation speed 2413 Select adaptation speed controller 2417 nx for 'nact < nx' message 2418 nmin for 'nact < nmin' message 2426 Tolerance band for 'nset = nact' message 2466 Switchover speed open/cl-loop control AM 2602 Motor temperature warning threshold 2607 Switchoff limit motor temperature 2608 Fixed temperature 2711 Significance speed representation 2712 Significance rotor flux representation 2713 Significance torque representation 2714 Significance rotor flux representation 2725 Scaling torque setpoint interface 3005 No. of encoder marks motor meas. system 3015 Activate PE MSD 3016 Commutation angle offset 3019 Current rotor position identification 3020 Maximum torsion rotor position ident. 3060 Enable brake control 3061 Brake release time 3062 Close holding brake speed 3063 Deceleration time 3064 Servo disable time 3070 Current setpoint increase time, rotor position identification 3071 Waiting time, rotor position identification 3072 Number of measurements, rotor position identification 3073 Permissible torsion rotor position ident. 3074 Rotor position adjustment 3075 Traverse rotor position identification 3076 Factor 'load moment of inertia' 3077 Reset time RP-ID controller 3098 Power section derating limit current 2266 热电机负载 2267 电机热负载警告阈值 2268 绕组时间常数 2400 额定电机速度 2401 最大电机利用率速度值 2403 爬行速度的脉冲抑制 2404 脉冲抑制计时器 2405 监控电机速度 2407 速度控制器的P增益 2408 高端适配速度的P增益 2409 速度控制器复位时间 2410 高端适配速度复位时间 2411 低适配速度 2412 高端适配速度 2413 选择速度控制器适配系数 2417 "vact 2418 ''vact 2466 AM开环/闭环控制的切换速度2602 电机温度警告阀值 2607 关断电机极限温度 2608 固定温度 2711 速度表示权值 2712 转子磁通表示的权值 2713 力表示权值 2714 转子磁通表示的权值 2725 常态力设定的插入 3005 电机测量系统的编码器标志数3015 激活PE MSD 3016 变换角度偏置 3019 电流转子位置标志 3020 最大移动转子位置标志 3060 使能制动控制 3061 制动(抱闸)释放时间 3062 关闭电机速度保持制动 3063 制动延迟时间 3064 伺服禁止时间 3070 电流额定值上升时间,转子位置识别3071 等待时间,转子位置识别 3072 测量次数,转子位置识别 3073 允许的转子位置识别 3074 转子位置匹配 3075 移动转子位置证明 3076 负载尺寸系数 3077 复位时间 RP-ID 控制器 3098 PS 下降限制电流 3099 Power sect. limit current derating factor 3100 Frequency pulse width modulation 3102 Motor code number 3103 Motor rated current 3104 Maximum motor current 3105 Reduction of maximum motor current 3112 Number of pole pairs motor 3113 Torque constant 3114 V oltage constant 3115 Armature resistance 3116 Armature inductance 3117 Motor moment of inertia 3118 Motor zero-speed current 3120 P gain current controller 3121 Reset time current controller 3122 Motor limit current 3125 Booting time 1 with V/f mode 3126 Booting time 2 with V/f mode 3128 Optimum load angle 3136 Motor zero-speed current 3142 Threshold speed field weakening 3145 Breakdown torque reduction factor 3146 Motor maximum speed 3147 Speed limitation 3149 Reluctance torque constant 3150 P gain flux controller 3151 Reset time flux controller 3159 Flowchart offset 3167 Response threshold for ground fault detection 3168 Maximum twisting for ground fault detection 3170 Pole pair width 3180 Lower current limit adaptation 3181 Upper current limit adaptation 3182 Factor current controller adaption 3183 Current controller adaptation on 3190 Evaluation torque limiting value 3192 Weight torque 3230 1st torque limiting value 3231 2nd torque limiting value 3232 Operating speed from MD1230 to MD1231 3233 Generative limitation 3234 Hysteresis MD 1232 3235 1st power limit value 3236 2nd power limit value 3239 Torque limit setup mode 3245 Threshold speed dep. Mset smoothing 3099 PS 限制电流下降因素 3100 频率脉宽调制 3102 电机代码 3103 额定电机电流 3104 最大电机电流 3105 减小最大电机电流 3112 电机极对数 3113 力常数 3114 电压常数 3115 电枢电阻 3116 电枢感应系数 3117 电机尺寸 3118 电机零速度电流 3120 电流控制器的P增益 3121 电流控制器复位时间 3122 电机限定电流 3125 V/f 模式的启动时间1 3126 V/f 模式的启动时间2 3128 在合适的负载角度 3136 电机零速度电流 3142 速度弱磁阀值 3145 故障力矩削减系数 3146 电机最大速度 3147 速度极限 3149 扭矩常量 3150 磁通控制器的P增益 3151 磁通控制器复位时间 3159 流程图修正 3167 用于接地识别的响应阈值3168 接地识别的最大运动 3170 极对的宽度 3180 电流下限调整 3181 电流上限调整 3182 电流控制器匹配系数 3183 电流控制器匹配 3190 检测力矩限定值 3192 重量 3230 第一功率限定值 3231 第二功率限定值 3232 MD1230到MD1231的操作速度3233 再生限定 3234 磁滞 MD 1232 3235 第一功率限定值 3236 第二功率限定值 3239 调整方式力限定 3245 取决于速度Fset的阀值 3246 Hysteresis speed dep. Mset smoothing 3265 Thermal motor protection 3266 Thermal motor load 3267 Therm. motor capacity utilization warning threshold 3268 Winding time constant 3400 Rated motor speed 3401 Speed for max. motor operational speed 3403 Creep speed for pulse suppression 3404 Timer pulse suppression 3405 Monitoring speed motor 3407 P gain speed controller 3408 P gain upper adaptation speed 3409 Reset time speed controller 3410 Reset time without adaptation speed 3411 Lower adaptation speed 3412 Upper adaptation speed 3413 Select adaptation speed controller 3417 nx for 'nact < nx' message 3418 nmin for 'nact < nmin' message 3426 Tolerance band for 'nset = nact' message 3466 Switchover speed open/cl-loop control AM 3602 Motor temperature warning threshold 3607 Switchoff limit motor temperature 3608 Fixed temperature 3711 Significance speed representation 3712 Significance rotor flux representation 3713 Significance torque representation 3714 Significance rotor flux representation 3725 Scaling torque setpoint interface 4005 No. of encoder marks motor meas. system 4015 Activate PE MSD 4016 Commutation angle offset 4019 Current rotor position identification 4020 Maximum torsion rotor position ident. 4060 Enable brake control 4061 Brake release time 4062 Close holding brake speed 4063 Deceleration time 4064 Servo disable time 4070 Current setpoint increase time, rotor position identification 4071 Waiting time, rotor position identification 4072 Number of measurements, rotor position identification 4073 Permissible torsion rotor position ident. 4074 Rotor position adjustment 4075 Traverse rotor position identification 4076 Factor 'load moment of inertia' 3246 F集平滑磁滞速度 3265 热电机保护 3266 热电机负载 3267 电机热负载警告阈值 3268 绕组时间常数 3400 额定电机速度 3401 最大电机利用率速度值 3403 爬行速度的脉冲抑制 3404 脉冲抑制计时器 3405 监控电机速度 3407 速度控制器的P增益 3408 高端适配速度的P增益 3409 速度控制器复位时间 3410 高端适配速度复位时间 3411 低适配速度 3412 高端适配速度 3413 选择速度控制器适配系数 3417 "vact 3418 ''vact 3466 AM开环/闭环控制的切换速度3602 电机温度警告阀值 3607 关断电机极限温度 3608 固定温度 3711 速度表示权值 3712 转子磁通表示的权值 3713 力表示权值 3714 转子磁通表示的权值 3725 常态力设定的插入 4005 电机测量系统的编码器标志数4015 激活PE MSD 4016 变换角度偏置 4019 电流转子位置标志 4020 最大移动转子位置标志 4060 使能制动控制 4061 制动(抱闸)释放时间 4062 关闭电机速度保持制动 4063 制动延迟时间 4064 伺服禁止时间 4070 电流额定值上升时间,转子位置识别4071 等待时间,转子位置识别 4072 测量次数,转子位置识别 4073 允许的转子位置识别 4074 转子位置匹配 4075 移动转子位置证明 4076 负载尺寸系数 4077 Reset time RP-ID controller 4098 Power section derating limit current 4099 Power sect. limit current derating factor 4100 Frequency pulse width modulation 4102 Motor code number 4103 Motor rated current 4104 Maximum motor current 4105 Reduction of maximum motor current 4112 Number of pole pairs motor 4113 Torque constant 4114 V oltage constant 4115 Armature resistance 4116 Armature inductance 4117 Motor moment of inertia 4118 Motor zero-speed current 4120 P gain current controller 4121 Reset time current controller 4122 Motor limit current 4125 Booting time 1 with V/f mode 4126 Booting time 2 with V/f mode 4128 Optimum load angle 4136 Motor zero-speed current 4142 Threshold speed field weakening 4145 Breakdown torque reduction factor 4146 Motor maximum speed 4147 Speed limitation 4149 Reluctance torque constant 4150 P gain flux controller 4151 Reset time flux controller 4159 Flowchart offset 4167 Response threshold for ground fault detection 4168 Maximum twisting for ground fault detection 4170 Pole pair width 4180 Lower current limit adaptation 4181 Upper current limit adaptation 4182 Factor current controller adaption 4183 Current controller adaptation on 4190 Evaluation torque limiting value 4192 Weight torque 4230 1st torque limiting value 4231 2nd torque limiting value 4232 Operating speed from MD1230 to MD1231 4233 Generative limitation 4234 Hysteresis MD 1232 4235 1st power limit value 4236 2nd power limit value 4077 复位时间 RP-ID 控制器 4098 PS 下降限制电流 4099 PS 限制电流下降因素 4100 频率脉宽调制 4102 电机代码 4103 额定电机电流 4104 最大电机电流 4105 减小最大电机电流 4112 电机极对数 4113 力常数 4114 电压常数 4115 电枢电阻 4116 电枢感应系数 4117 电机尺寸 4118 电机零速度电流 4120 电流控制器的P增益 4121 电流控制器复位时间 4122 电机限定电流 4125 V/f 模式的启动时间1 4126 V/f 模式的启动时间2 4128 在合适的负载角度 4136 电机零速度电流 4142 速度弱磁阀值 4145 故障力矩削减系数 4146 电机最大速度 4147 速度极限 4149 扭矩常量 4150 磁通控制器的P增益 4151 磁通控制器复位时间 4159 流程图修正 4167 用于接地识别的响应阈值4168 接地识别的最大运动 4170 极对的宽度 4180 电流下限调整 4181 电流上限调整 4182 电流控制器匹配系数 4183 电流控制器匹配 4190 检测力矩限定值 4192 重量 4230 第一功率限定值 4231 第二功率限定值 4232 MD1230到MD1231的操作速度4233 再生限定 4234 磁滞 MD 1232 4235 第一功率限定值 4236 第二功率限定值 4239 Torque limit setup mode 4245 Threshold speed dep. Mset smoothing 4246 Hysteresis speed dep. Mset smoothing 4265 Thermal motor protection 4266 Thermal motor load 4267 Therm. motor capacity utilization warning threshold 4268 Winding time constant 4400 Rated motor speed 4401 Speed for max. motor operational speed 4403 Creep speed for pulse suppression 4404 Timer pulse suppression 4405 Monitoring speed motor 4407 P gain speed controller 4408 P gain upper adaptation speed 4409 Reset time speed controller 4410 Reset time without adaptation speed 4411 Lower adaptation speed 4412 Upper adaptation speed 4413 Select adaptation speed controller 4417 nx for 'nact < nx' message 4418 nmin for 'nact < nmin' message 4426 Tolerance band for 'nset = nact' message 4466 Switchover speed open/cl-loop control AM 4602 Motor temperature warning threshold 4607 Switchoff limit motor temperature 4608 Fixed temperature 4711 Significance speed representation 4712 Significance rotor flux representation 4713 Significance torque representation 4714 Significance rotor flux representation 4725 Scaling torque setpoint interface 4239 调整方式力限定 4245 取决于速度Fset的阀值4246 F集平滑磁滞速度 4265 热电机保护 4266 热电机负载 4267 电机热负载警告阈值 4268 绕组时间常数 4400 额定电机速度 4401 最大电机利用率速度值 4403 爬行速度的脉冲抑制 4404 脉冲抑制计时器 4405 监控电机速度 4407 速度控制器的P增益 4408 高端适配速度的P增益 4409 速度控制器复位时间 4410 高端适配速度复位时间 4411 低适配速度 4412 高端适配速度 4413 选择速度控制器适配系数4417 "vact 4418 ''vact 4466 AM开环/闭环控制的切换速度4602 电机温度警告阀值 4607 关断电机极限温度 4608 固定温度 4711 速度表示权值 4712 转子磁通表示的权值 4713 力表示权值 4714 转子磁通表示的权值 4725 常态力设定的插入 5001 Velocity control cycle 5002 Monitoring cycle 5003 Configuration STS 5004 Configuration structure 5005 Encoder markings for rotat. meas.sys. 5008 Encoder phase error compensation 5011 Configuration actual value acquisition 5012 Function switch 5021 Multiturn resol. abs. val. encoder motor 5022 Meas. steps of the motor absolute track 5023 Diagnosis meas. circ. motor abs. track 5024 Grid graduations for linear scale 5025 Serial no. of motor measuring system 5001 速度控制循环 5002 监控循环 5003 STS配置 5004 配置结构 5005 旋转测量系统编码器标记5008 编码器相误差补偿 5011 配置获取实际值 5012 功能开关 5021 电机多圈绝对值编码器 5022 电机绝对轨迹的测量步骤5023 电机绝对轨迹测量循环的诊断5024 光栅栅距 5025 电机测量系统的系列号 5027 Configuration encoder IM 5028 IM frame length SSI 5040 Piston zero to machine zero 5041 Machine zero to pos. actual value zero 5042 Machine zero to pos. actual value zero 5046 Max. number SSI test 5047 Limit in the case of variance 5100 Elasticity module for hydraulic oil 5101 System pressure 5102 Feedforward pressure 5106 Valve code number 5107 Rated valve volume current 5108 Valve rated pressure drop 5109 Valve rated voltage 5110 Valve knee point volume current 5111 Valve knee point voltage 5112 Valve volume current ratio A/B 5113 Valve configuration 5114 Valve natural frequency 5115 Valve damping 5131 Cylinder piston diameter 5132 Cylinder piston rod diameter A 5133 Cylinder piston rod diameter B 5134 Piston stroke 5135 Cylinder dead volume drive end 5136 Cylinder dead volume non-drive end 5140 Connection conf. for valve cylinder 5141 Cable length on A side 5142 Cable length on B side 5143 Interior cable diameters A and B 5150 Moving mass of drive 5151 Mounting position on A side of cylinder 5152 Cylinder fastening 5160 Piston position min. nat. frequency 5161 Damping of drive 5162 Natural frequency of drive A 5163 Natural frequency of drive 5164 Natural frequency of drive B 5180 Desired damping for controlled system 5200 No. of manip.var. filt. for speed contr. 5201 Type manipul. var. filter speed control 5202 Nat. frequ. manip.var. fil.1 speed contr 5203 Damping of manip.var. fil. 1 speed contr 5204 Nat. frequ. manip.var. fil.2 speed contr 5205 Damping of manip.var. fil. 2 speed contr 5210 Block.frequ.manip.var.fil. 1 speed contr 5027 配置编码器IM 5028 IM框架长度SSI 5040 活塞零点到机床零点 5041 机床零点到位置实际值零点 5042 机床零点到位置实际值零点 5046 最大数SSI测试 5047 变化极限 5100 液压油的弹性模块 5101 系统压力 5102 前馈压力 5106 阀门代码号 5107 额定阀门容量电流 5108 阀门额定压降 5109 阀门额定电压 5110 阀门弯点容量电流 5111 阀门拐点电压 5112 阀门容量电流比率A/B 5113 数据配置 5114 阀门自然频率 5115 阀门阻尼 5131 汽缸活塞直径 5132 汽缸活塞直径A 5133 汽缸活塞直径B 5134 活塞冲程 5135 汽缸驱动端的卡死流量 5136 汽缸非驱动端的卡死流量 5140 圆柱体汽缸的连接配置 5141 在A面的电缆长度 5142 在B面的电缆长度 5143 内部电缆直径A和B 5150 驱动的移动量 5151 在圆柱体A面上的安装位置 5152 圆柱体扣栓 5160 活塞位置最小自然频率 5161 驱动阻尼 5162 驱动A的自然频率 5163 驱动的自然频率 5164 驱动B的自然频率 5180 控制系统的预定阻尼 5200 速度控制器控制变量滤波器号 5201 速度控制器被控变量滤波器类型 5202 速度控制器控制变量滤波器1的自然频率5203 速度控制器控制变量滤波器1阻尼 5204 速度控制器控制变量滤波器1的自然频率5205 速度控制器控制变量滤波器2阻尼 5210 速度控制器控制变量滤波器1的阻止频率 5211 Bandwidth manip.var. fil. 1 speed contr. 5212 Count. bandw. manip.var.f.1 speed contr. 5213 Block.frequ.manip.var.fil. 2 speed contr 5214 Bandwidth manip.var. fil. 2 speed contr. 5215 Count. bandw. manip.var.f.2 speed contr. 5230 Force limitation threshold around weight 5231 Weight force limitation 5232 Velocity threshold static friction 5233 Interrupting lead static friction 5234 Friction force velocity >0 5235 Friction force velocity <0 5240 Controlled system gain power controller 5241 Configuration of power controller 5242 P gain of power controller 5243 Attenuation power controller P component 5244 Power controller reset time 5245 Smoothing time const. power controller 5246 Power controller lead time 5247 Power controller feedforw.control factor 5260 No. of feedforward filter power contr. 5261 Type feedfwd. control filter power contr 5264 PT2 natural frequency feedforw. filter 1 5265 PT2 damping feed forward filter 1 5268 Block.frequ. feedfwd. filter 1 5269 Bandwidth feedforward filter 1 5270 Counter bandwidth feedfwd. filter 1 5280 No. of manipulated variable filters 5281 Type manipulated variable filter 5284 Natural frequency of manip.var. fil. 1 5285 Damping of manipulated variable filter 1 5288 Blocking frequ. manip. var. filter 1 5289 Bandwidth manipulated variable filter 1 5290 Counter bandwidth manipul. var. filter 1 5401 Maximum working velocity 5402 Braking time for controller disable 5404 Timer power disable 5406 P gain speed controller A 5407 P gain speed controller 5408 P gain speed controller B 5409 Reset time speed controller 5413 Select speed controller adaptation 5414 Nat. freq. reference model 5415 Damping of reference model 5420 Max. velocity for setup operation 5421 Time constant integrator feedback 5422 Velocity threshold integrator feedback 5211 速度控制器带宽控制变量滤波器1 5212 速度控制器控制变量滤波器1的反向带宽5213 速度控制器控制变量滤波器2的阻止频率5214 速度控制器带宽控制变量滤波器 5215 速度控制器控制变量滤波器2的反向带宽5230 重力极限值 5231 重力极限 5232 静态摩擦的速度阀值 5233 导角静态摩擦中断 5234 摩擦力速度>0 5235 摩擦力速度<0 5240 功率控制器受控系统增益 5241 功率控制器配置 5242 功率控制器的P增益 5243 功率控制器P矢量衰减 5244 功率控制器复位时间 5245 功率控制器的平滑时间常数 5246 功率控制器超前时间 5247 功率控制器前馈控制系数 5260 功率控制前馈滤波器号 5261 功率控制器前馈控制滤波器类型 5264 PT2前馈滤波器1的自然频率 5265 PT2前馈滤波器1的阻尼 5268 前馈滤波器的阻止频率 5269 带宽前馈滤波器1 5270 前馈滤波器1的反向带宽 5280 控制变量滤波器号 5281 被控变量滤波器类型 5284 控制变量滤波器1的自然频率 5285 控制变量滤波器1阻尼 5288 控制变量滤波器1的阻止频率 5289 带宽控制变量滤波器1 5290 控制变量滤波器1的反向带宽 5401 最大加工速度 5402 控制器禁止的停止时间 5404 计时器禁止 5406 速度控制器A的P增益 5407 速度控制器的P增益 5408 速度控制器B的P增益 5409 速度控制器复位时间 5413 选择速度控制器匹配 5414 参考模式的自然频率 5415 参考模式阻尼 5420 设定操作的最大速度 5421 积分器反馈的时间常数 5422 积分器速度反馈阀值 5430 Smoothing time constant speed controller 5431 Lead time of speed controller A 5432 Lead time of speed controller 5433 Lead time of speed controller B 5435 System gain 5440 Positive velocity setpoint value limit 5441 Negative velocity setpoint value limit 5460 Increase in friction compensation 5461 Metal free zone for friction compensat. 5462 Surface matching factor positive 5463 Surface matching factor negative 5464 Knee-pt compensation pos. flow 5465 Knee-point compensation pos. voltage 5466 Knee-point compensation rounding area 5467 Knee-pt compensation neg. flow 5468 Knee-point compensation neg. voltage 5470 Offset compensation 5474 Control voltage limit 5475 Control voltage limit 5476 Manipulated variable inversion 5480 Knee-pt. comp. pos. flow zero range 5481 Knee-pt. comp. pos. volt. zero range 5482 Knee-point comp. rounding zero range 5483 Knee-pt comp. neg. flow zero range 5484 Knee-pt. comp. neg. volt. zero range 5485 Knee-pt. comp. pos. flow satur. 5486 Knee-pt. comp. pos. volt. saturation 5487 Knee-pt. comp. neg. flow satur. 5488 Knee-pt. comp. neg. volt. saturation 5500 Number of speed filters 5501 Type of velocity filter 5502 PT1 time constant velocity filter 1 5506 PT2 nat. freq. velocity filter 1 5507 PT2 damping velocity filter 1 5514 BSF blocking freq. speed filter 1 5515 BSF bandwidth velocity filter 1 5516 Numerator bandwidth speed filter 1 5520 BSF nat. freq. velocity filter 1 5522 Time constant act. velocity value filter 5530 Safety circuit 5531 Manipulated variable blocking time 5532 Power enable blocking time 5550 Reference value pressure sensor A at 10V 5551 Offset comparison for pressure sensor A 5552 Reference value pressure sensor B at 10V 5553 Offset comparison for pressure sensor B 5430 速度控制器的平滑时间常数5431 速度控制器A的超前时间 5432 速度控制器超前时间 5433 速度控制器B的超前时间 5435 系统增益 5440 正向速度设定值极限 5441 速度负向设定值极限 5460 增加摩擦补偿 5461 摩擦补偿的金属自由区域 5462 正向表面匹配系数 5463 负向表面匹配系数 5464 拐点正向补偿流量 5465 拐点正向补偿电压 5466 拐点补偿舍入区域 5467 拐点负向补偿流量 5468 拐点负向补偿电压 5470 偏差补偿 5474 控制电压的限制 5475 控制电压极限 5476 被控制量反转 5480 拐点负向补偿零流量范围 5481 拐点正向补偿零电压范围 5482 拐点补偿舍入零范围 5483 拐点负向补偿零流量范围 5484 拐点负向补偿零电压范围 5485 拐点正向补偿流量饱和 5486 拐点负向补偿电压饱和 5487 拐点负向补偿流量饱和 5488 拐点负向补偿饱和电压 5500 速度滤波器号 5501 速度滤波器类型 5502 PT1速度滤波器1的时间常数5506 PT2速度滤波器1的自然频率5507 PT2速度滤波器1的阻尼 5514 BSF阻止频率,速度滤波器5515 BSF带宽速度滤波器 5516 计数器带宽速度滤波器1 5520 BSF自然频率,速度滤波器1 5522 速度实际值滤波器的时间常数5530 安全电路 5531 被控制量阻止时间 5532 功率使能停止时间 5550 压力传感器A在10V时的参考值5551 压力传感器A的偏差比较 5552 压力传感器B在10V时的参考值5553 压力传感器B的偏差比较 5600 Concealable alarms (Power On) 5601 Concealable alarms (Reset) 5605 Speed controller time limited 5606 Threshold for veloc. controller limited 5609 Max. measuring speed of linear scale 5610 Diagnosis functions 5612 Configured shutdown response PO alarms 5613 Configured shutdown response RESET alarm 5614 Timer slide valve monitoring 5620 Bits for variable signaling functions 5621 Signal number variable message function 5622 Address variable signaling function 5623 Threshold f. variable signaling function 5624 Hysteresis variable signaling functions 5625 Pickup delay variable signaling function 5626 Delayed dropout var. signaling funct. 5648 Valve ID parameter2 5649 Valve ID parameter2 5650 Diagnosis control 5651 Signal number min/max memory 5652 Memory location min/max memory 5653 Minimum value of min/max memory 5654 Maximum value of min/max memory 5655 Segment memory location monitor 5656 Address memory location monitor 5657 Value display monitor 5658 Value input monitor 5659 Value transfer monitor 5700 Status of binary inputs 5704 Actual pressure value A 5705 Actual pressure value B 5706 Velocity setpoint 5707 Velocity actual value 5708 Cylinder force actual value 5709 Significance voltage representation 5710 Significance of pressure display 5711 Significance of velocity display 5713 Force representation weighting 5714 Significance of position display 5715 V oltage slider valve position setpoint 5716 V oltage slider valve position act. value 5717 Cylinder force setpoint 5720 CRC diagnosis parameter 5725 Normalization force setpt intersection 5730 Display of operating mode 5731 Image ZK1_PO register 5600 隐含的报警(上电) 5601 隐含的报警(复位) 5605 速度控制器时间限制 5606 速度控制器的极限启动值 5609 光栅的最大测量速度 5610 诊断功能 5612 装配的停机动作PO报警 5613 已经配置的RESET复位报警的响应5614 计时器平滑值监控 5620 变量信号传输功能位 5621 变量信息功能的信号数 5622 地址变量信号传输功能 5623 变量信号传输功能的启动值 5624 磁滞变量信号传输功能 5625 恢复延时变量信号传输功能 5626 延时下降变量信号输出功能 5648 值 ID 参数2 5649 值 ID 参数2 5650 诊断控制 5651 信号数最小/最大内存 5652 最小/最大内存内存位置 5653 最小/最大存储区中的最小值 5654 最小/最大存储区的最大值 5655 内存分段位置的监控 5656 地址内存位置监控 5657 数值显示监控 5658 数值输入监控 5659 数据传递监控 5700 二进制输入状态 5704 实际压力值 A 5705 实际压力值 B 5706 速度设定值 5707 速度实际值 5708 汽缸力的实际值 5709 电压显示的有效位数 5710 压力显示特性 5711 速度显示特性 5713 力表示权值 5714 位置显示特性 5715 位置设定值的电压平滑值 5716 位置实际值的电压平滑值 5717 汽缸力的设定值 5720 CRC诊断参数 5725 常态力设定的插入 5730 操作方式的显示 5731 图形 ZK1_PO 寄存器 西门子840D数控系统的参数设定 摘要本文主要针对以西门子840D为控制乐境的数控机床,对算机床数据的调整进行了分析,同时对机床限住的设定与驱神的配王 进行了论述。 关键词保护级别有效方式设定配置 l 概述 随着电站经济的飞跃发展,对电站产品的加工设备的要求越来越高,对机械加工的要求也越来越高,如高低压加热器的管板,冷凝器 的隔板等加工,这些都必须用数控机床来完成。我国在80年代初进口了许多数控机床,其采用的数控系统十分多样化,其中西门子 840D数控系统由于其强大的功能,优越的性能,已越来越被广大厂商的各种数控机床所采用,但西门子公司所提供的标准数据并不一 定完全适合机床,因些很有必要进行参数的设定与调整。 2 相关问题 在对机床参数进行调整前,有两个与数据调整有关的问题需要特别注意的:西门子数据的保护级别和数据写入有效的方式。 2.1 数据的保护级别 西门子共设有7个等级的数据保护级别(见表1),级别0是最高的而级别7是最低的,高级别向下兼容低级别。在修改数据的时候,若设 定的Password级别不够高,将无法修改某些特定的机床参数。具体修改密码的方法是在操作面板(OP)上依次按如下的软 2.2 数据有效的方式 数据修改后并不全是简单的就能有效,840D数控系统提供了多种数据有效的方式,而具体采用哪种方式又取决于所修改数据的参数类型。数据的类型及其生效的方式共有如下几种: (1)POWER ON(of)生效方式是按操作 (2)NEW-CONF(cf)生效方式是按操作 面板的或者按机床控制面 (3)RESET(re)按机床控制面板上的l 键生效 (4)II~ F_,DLt,TE(s0)数据输人后即可生效 3 参数的设定与调整 西门子840D数控的控制系统参数是由机床数据(MD)与设定数据(sD)组成,机床数据与设定数据的数据范围及其定义见表2所示。由表2中可以看出,机床数据(MD)主要由通用,特别通道,特别轴等机床数据构成;设定数据(sD)由通用,特别轴,特别通道设定数据组成。西门子840D数控数据的调整 SINUMERIK 840D涉及五轴转换的主要参数 10620 EULER_ANGLE_NAME_TAB Euler角名称 10630 NORMAL_VECTOR_NAME_TAB 正常矢量名称 10640 DIR_VECTOR_NAME_TAB 方向矢量名称 10642 ROT_VECTOR_NAME_TAB 旋转矢量的名称 10644 INTER_VECTOR_NAME_TAB 暂时矢量的名称 10646 ORIENTATION_NAME_TAB 编程一个第二方向路径的名称 10648 NUTA TION_ANGLE_NAME 垂头角名称 10670 STAT_NAME 状态信息名称:笛卡儿PTP行程中模糊点解决的状态信息标识符 10672 TU_NAME 轴的状态信息名:笛卡儿行程中模糊点解决的状态信息标识符,必须选择一个与其他不冲突的标识符(如轴,Euler角,通常矢量,方向矢量,中间点坐标) 10674 PO_WITHOUT_POLY 无G功能的POLY的多项式编程 20150 GCODE_RESET_V ALUES G组的初始设定,选择一些G组 [0]1=G0,2=G01(std) [5]1=G17(std)2 =G18,3=G19 [7]1=G500(std)2 =G54,3=G55,4=G56,5=G57 [9]1=G60(std)2 =G64,3=G641 [11]1=G601(std)2 =G602,3=G603 [12]1=G70 2 =G71(std) [13]1=G90(std)2 =G91 [14]1=G93 2 =G94(std),3=G95 [20] 1=BRISK(std),2=SOFT ABB 断路器参数调试讲义 电控柜的断路器进行设置,在ABB 塑壳断路器(正面)下方有两个旋钮(见下图),通过调节旋钮的位置可以设置断路器的过流、过载保护值,具体设置方法如下: 一、ABB 塑壳断路器过流、过载旋钮设置说明: 1、过流调节旋钮,设置电控箱整个负载的过流保护值,调节范围从2000A —4000A ,从MIN —MED —MAX 共有9个档位,档位对应值如下: MIN (1)档—2000A; (2)档—2250A; (3)档—2500A; (4)档—2750A; 过流调节 旋钮 过载调节旋钮 MED(5)档—3000A; (6)档—3250A; (7)档—3500A; (8)档—3750A; MAX(9)档—4000A; 2、过载调节旋钮,设置电控箱整个负载的过载保护值,调节范围从280A—400A,从MIN—MED—MAX共有9个档位,档位对应值如下: MIN(1)档—280A; (2)档—295A; (3)档—310A; (4)档—325A; MED(5)档—340A; (6)档—355A; (7)档—370A; (8)档—385A; MAX(9)档—400A; 二、ABB断路器机型设置说明 三ABB断路器低压断路器的参数详解 3.1、空气断路器的框架电流Iu、额定电流Ie、额定电流整定值Ir的 含义是什么? ?框架电流Iu: 又称为额定不间断电流。指在规定条件下,电器在长期工作 制下,各部件的温升不超过规定极限值时所承受的电流值。 ?额定工作电流Ie: 指在规定条件下,能保证电器正常工作的电流值。它和额定 电压、电网频率、额定工作制、使用类别、触头寿命及防护 等级等因素有关。有时被标识为In。 ?额定电流整定值Ir: 这是使用者通过断路器的脱扣器自行整定的一个电流值,断 路器根据使用者整定的Ir对电路进行过载、短路保护。 ?比如ABB的塑壳断路器S5N400 R320 PR112/LI FF 3P , Iu=400A Ie=320A, Ir=( 0.4 – 1)Ie 可调。 3.2、极限短路分断能力Icu、额定运行短路能力Ics、短时耐受电流 Icw的含义是什么? ?极限短路分断能力Icu 断路器在承受此短路电流时必须可靠的分断短路故障,但不要求断路器未经过维修或更换零件的条件下能继续使用。 A B B断路器参数调试 讲义 ABB 断路器参数调试讲义 电控柜的断路器进行设置,在ABB 塑壳断路器(正面)下方有两个旋钮(见下图),通过调节旋钮的位置可以设置断路器的过流、过载保护值,具体设置方法如下: 一、ABB 塑壳断路器过流、过载旋钮设置说明: 1、过流调节旋钮,设置电控箱整个负载的过流保护值,调节范围从2000A —4000A ,从MIN —MED —MAX 共有9个档位,档位对应值如下: MIN (1)档—2000A; (2)档—2250A; (3)档—2500A; (4)档—2750A; 过流调 过载调 MED(5)档—3000A; (6)档—3250A; (7)档—3500A; (8)档—3750A; MAX(9)档—4000A; 2、过载调节旋钮,设置电控箱整个负载的过载保护值,调节范围从280A—400A,从MIN—MED—MAX共有9个档位,档位对应值如下: MIN(1)档—280A; (2)档—295A; (3)档—310A; (4)档—325A; MED(5)档—340A; (6)档—355A; (7)档—370A; (8)档—385A; MAX(9)档—400A; 二、ABB断路器机型设置说明 三ABB断路器低压断路器的参数详解 3.1、空气断路器的框架电流Iu、额定电流Ie、额定电流整定值Ir 的含义是什么? ?框架电流Iu: 又称为额定不间断电流。指在规定条件下,电器在长期工 作制下,各部件的温升不超过规定极限值时所承受的电流 值。 ?额定工作电流Ie: 指在规定条件下,能保证电器正常工作的电流值。它和额 定电压、电网频率、额定工作制、使用类别、触头寿命及 防护等级等因素有关。有时被标识为In。 ?额定电流整定值Ir: 这是使用者通过断路器的脱扣器自行整定的一个电流值, 断路器根据使用者整定的Ir对电路进行过载、短路保护。 ?比如ABB的塑壳断路器S5N400 R320 PR112/LI FF 3P , Iu=400A Ie=320A, Ir=( 0.4 – 1)Ie 可调。 3.2、极限短路分断能力Icu、额定运行短路能力Ics、短时耐受电流 Icw的含义是什么? ?极限短路分断能力Icu 西门子840D主要参数意译 西门子840D的主要参数释义 文字一、通道机床数据 20000 通道名称 20050 几何轴-通道轴的分配 20060 通道中的几何轴名称 20070 通道中机床轴号 20080 通道中的通道轴名称 20090 主导主轴的号 20092 主轴旋转的使能/使能取消 20094 轴运行的M运行(西门子模式) 20095 轴运行的M功能(外部模式) 20096 T,M 刀具地址代号改变 20098 在MMC上显示轴 20100 带面对轴功能的几何轴 20108 事件驱动程序调用的设置 20109 Prog-Events 的属性 20110 RESET复位时的基本功能设置 20112 NC启动的基本功能设置 20114 方式改变中断了MDI 20116 带读限制的中断程序关闭 20117 带信号的中断程序关闭 20118 几何轴改变自动使能 20120 复位时刀具生效 20121 复位的预选刀具 20122 RESET复位/启动和TC时刀具生效 20123 RESET时 $P_USEKT 的预选值 20124 刀具夹持装置号 20126 RESET复位时刀架生效 20128 换刀在搜索中 20130 RESET复位时刀沿生效 20132 有效总偏差复位 20140 用复位健使转换生效。 20150 G代码组的初始设定 20152 G代码组复位 20154 G代码组的初始设定 20156 外部 G 组复位方式 20160 C 样条程序块的数量 20170 COMPRESS压缩的最大程序块长度 20172 COMPRESSION压缩方式计算的最大路径进给率20180 带刀架的旋转轴增量 20182 带刀架的旋转轴偏置 20184 零件偏置的基本FRAME号 20200 倒角/圆角的空程序段 ABB 断路器参数调试讲义 电控柜的断路器进行设置,在ABB 塑壳断路器(正面)下方有两个旋钮(见下图),通过调节旋钮的位置可以设置断路器的过流、过载保护值,具体设置方法如下: 一、ABB 塑壳断路器过流、过载旋钮设置说明: 1、过流调节旋钮,设置电控箱整个负载的过流保护值,调节范围从2000A —4000A ,从MIN —MED —MAX 共有9个档位,档位对应值如下: MIN (1)档—2000A; (2)档—2250A; (3)档—2500A; (4)档—2750A; 过流 调节旋钮 过载调节旋钮 MED(5)档—3000A; (6)档—3250A; (7)档—3500A; (8)档—3750A; MAX(9)档—4000A; 2、过载调节旋钮,设置电控箱整个负载的过载保护值,调节范围从280A—400A,从MIN—MED—MAX共有9个档位,档位对应值如下: MIN(1)档—280A; (2)档—295A; (3)档—310A; (4)档—325A; MED(5)档—340A; (6)档—355A; (7)档—370A; (8)档—385A; MAX(9)档—400A; 二、ABB断路器机型设置说明 EBZ230380132400A7档2档 EBZ260H 380132400A7档2档380160400A8档2档 EBZ318H380200400A9档3档 三ABB断路器低压断路器的参数详解 3.1、空气断路器的框架电流Iu、额定电流Ie、额定电流 整定值Ir的含义是什么 框架电流Iu: 又称为额定不间断电流。指在规定条件下,电器在长期工作 制下,各部件的温升不超过规定极限值时所承受的电流值。 额定工作电流Ie: 指在规定条件下,能保证电器正常工作的电流值。它和额定电压、电网频率、额定工作制、使用类别、触头寿命及 防护等级等因素有关。有时被标识为In。 额定电流整定值Ir: 这是使用者通过断路器的脱扣器自行整定的一个电流值,断路器根据使用者整定的Ir对电路进行过载、短路保 护。 比如ABB的塑壳断路器S5N400 R320 PR112/LI FF 3P , Iu=400A Ie=320A, Ir=( – 1)Ie 可调。 3.2、极限短路分断能力Icu、额定运行短路能力Ics、短 时耐受电流Icw的含义是什么 极限短路分断能力Icu 断路器在承受此短路电流时必须可靠的分断短路 西门子840D主要参数意译西门子840D的主要参数释义 文字一、通道机床数据 20000 通道名称 20050 几何轴-通道轴的分配 20060 通道中的几何轴名称 20070 通道中机床轴号 20080 通道中的通道轴名称 20090 主导主轴的号 20092 主轴旋转的使能/使能取消20094 轴运行的M运行(西门子模式) 20095 轴运行的M功能(外部模式) 20096 T,M 刀具地址代号改变 20098 在MMC上显示轴 20100 带面对轴功能的几何轴 20108 事件驱动程序调用的设置 20109 Prog-Events 的属性 20110 RESET复位时的基本功能设置20112 NC启动的基本功能设置 20114 方式改变中断了MDI 20116 带读限制的中断程序关闭 20117 带信号的中断程序关闭 20118 几何轴改变自动使能 20120 复位时刀具生效 20121 复位的预选刀具 20122 RESET复位/启动和TC时刀具生效 20123 RESET时$P_USEKT 的预选值20124 刀具夹持装置号 20126 RESET复位时刀架生效20128 换刀在搜索中 20130 RESET复位时刀沿生效 20132 有效总偏差复位 20140 用复位健使转换生效。 20150 G代码组的初始设定 20152 G代码组复位 20154 G代码组的初始设定 20156 外部G 组复位方式 20160 C 样条程序块的数量 20170 COMPRESS压缩的最大程序 块长度 20172 COMPRESSION压缩方式计 算的最大路径进给率 20180 带刀架的旋转轴增量 20182 带刀架的旋转轴偏置 20184 零件偏置的基本FRAME号 20200 倒角/圆角的空程序段 20201 斜面圆整行为 20202 有/无带SA的传输运动程序 块数量 20204 在趋近/回退时的方向反转 20210 带TRC的补偿程序块的最大 角度 20220 DISC的最大值 20230 带TRC的插值计算的最大角 度 20240 带TRC的程序段轮廓计算 20250 有/无带TR的传输运动程序 块数量 20252 带刀具补偿的最大程序块数 量 20254 在线刀具补偿使能 20256 多项式插值是可能的 20260 对样条插补的速度控制 20262 执行SPLINE(样条)时路径速度 出错 20270 没有程序的初始位置边沿 20272 不带编程的初始位置总校验 20310 刀具管理功能有效 20320 刀架中刀具的时间监控 20350 激活刀具监控 20360 刀具参数的定义 20380 带G43 / G44的刀具补偿模式 20382 刀具补偿的活动 20384 从动轴刀具长度补偿模拟 20390 温度补偿激活 20392 刀具长度温度补偿的最大值 20396 在刀具方向DRF偏置 20400 预处理随后程序块的速度 20430 预处理倍率速度字符的数量 20440 程序预处理状态速度特征的倍率 20450 程序块循环时间的释放系数 20455 预测未来的特殊功能 20460 预见功能的平滑系数 20462 带编程进给的进给率 20465 轨迹动态进给率的匹配 20470 轮廓编程精度 20480 带G64x的平滑特性 20482 压缩机的方式 20484 压缩机功率 20490 G641/G642不受倍率系数约束 20500 固定速度的最小时间 Xxxxxxxxxxxxx XXXXXXXXXXXXXXX项目 电控柜 技术规范书 目录1.总则 2.基本技术参数及要求 3.供货范围 4.技术资料和交付进度 5. 监造、检验/试验和性能验收试验 6.技术服务和设计联络 7 .分包与外购 8 .差异表 1、总则 1.1 一般要求 1.1.1 本技术规范适用于xxxxxxxxx限公司XXXXXXXXXXXXXXX项目。本技术规范详细的说明了电控柜及其附属设备的功能、设计、结构、性能、安装和试验等方面的技术要求。 1.1.2 本技术规范阐明了电控柜的最低技术要求。卖方提供的设备在技术上应是成熟的、先进的和可靠的,要求产品工艺精湛、功能完善、稳定性高、维护方便,完全符合技术要求。适用于交流额定电压400V、额定频率50HZ的厂用电系统、是完整的成套设备,在符合使用环境条件情况下,接通电源即可使用。 1.1.3卖方提供的设备是完全符合工业标准及规范要求的优质产品。 1.1.4 卖方保证提供的低压电控柜产品须在国内通过国家检测中心型式试验,并获得《3C中国国家强制性认证》CCC认证证书,产品在国内大中型项目中可靠运行。 1.1.5 卖方应仔细阅读招标文件,包括商务和技术部分的所有规定。由卖方提供的设备的技术规范应与本技术规范书中规定的要求相一致。 1.1.6 本规范书提出了对电控柜本体及其附属设备的技术参数、性能、结构、试验等方面的技术要求。 1.1.7本规范书提出的是最低限度的技术要求,并未对一切技术细节作出规定,也未充分引述有关标准和规范的条文,卖方应提供符合GB和IEC最新版本的标准及本规范书的优质产品。 1.1.8 如果卖方没有以书面形式对本规范书的条文提出异议,则意味着卖方提供的设备完全符合本规范书的要求。如有异议,应以“对规范书的意见和同规范书的差异”为标题的专门章节加以详细描述。 1.1.9 规范书所使用的标准如遇与卖方所执行的标准不一致时,按较高标准执行。 1.1.10 规范书经供、需双方确认后,作为合同的附件,与合同正文具有同等的法律效力。 1.1.11 本规范书未尽事宜,由买方和卖方在合同技术谈判时双方协商确定。 1.2 工作范围 1.2.1本技术规范的使用范围仅限于本工程所订电控柜(简称低压电控柜或电控柜)。其中包括电控柜本体及其辅助设备的功能设计、结构、性能、安装和试验等方面的技术要求,以及供货和现场技术服务。 1.2.2 合同签订后,卖方应在三天内,向买方提出一个详尽的生产计划,包括电控柜设计、材料采购、设备制造、厂内测试以及运输等项的详情,以确定每部分工作及其进度。 1.2.3 如有延误,卖方应及时将延误交货的原因、后果及采取的补救措施等,向买方加以说明。 1.3主要标准和规范 1.3.1 合同中所有设备、备品备件,包括卖方自其它单位获得的所有附件和设备,除本合同中规定的技术参数和要求外,其余均遵照最新版本的国家标准(GB或GB/T)国际电工委员会标准(IEC)及国际单位制(SI)。 6SE70调试基本参数设置 恢复缺省设置 P053=6 允许参数存取 6:允许通过PMU和串行接口OP1S变更参数 P060=2 固定设置菜单 P366=0 0:具有PMU的标准设置 1:具有OP1S的标准设置 P970=0 参数复位 参数设置P060=5 系统设置菜单 P071= 装置输入电压 P095=10 异步/同步电机,国际标准 P100= 1:V/f控制 3:无测速机的速度控制 4:有测速机的速度控制 5:转矩控制 P101= 电机额定电压 P102= 电机额定电流 P103= 电机励磁电流,如果此值未知,设P103=0 当离开系统设置,此值自动计算。 P104= 电机额定功率因数 P108= 电机额定转速 P109= 电机级对数 P113= 电机额定转矩 P114=3 3:高强度冲击系统(在:P100=3,4,5时设置)P115=1 计算电机模型 参数值P350-P354设定到额定值 P130= 10:无脉冲编码器 11:脉冲编码器 P151= 脉冲编码器每转的脉冲数 P330= 0:线性(恒转矩) 1:抛物线特性(风机/泵) P384.02= 电机负载限制 P452= % 正向旋转时的最大频率或速度 P453= % 反向旋转时的最大频率或速度 数值参考P352和P353 P060=1 回到参数菜单 P128= 最大输出电流 P462= 上升时间 P464= 下降时间 P115=2 静止状态电机辩识(按下P键后,20S之内合闸)P115=4 电机模型空载测量(按下P键后,20S之内合闸) 6SE70 变频装置调试步骤 一.内控参数设定 1.1 出厂参数设定 P053=7 允许CBP+PMU+PC 机修改参数 P60=2 固定设置,参数恢复到缺省 P366=0 PMU 控制 P970=0 启动参数复位 执行参数出厂设置,只是对变频器的设定与命令源进行设定,P366 参数选择不同,变频器的设定和命令源可以来自端子,OP1S,PMU。电机和控制参数未进行设定,不能实施电机调试。 1.2 简单参数设定 P60=3 简单应用参数设置,在上述出厂参数设置的基础上,本应用设定电机控制参数 P071 进线电压(变频器400V AC / 逆变器540V DC) P95=10 IEC 电机 P100=1 V/F 开环控制 3 不带编码器的矢量控制 4 带编码器的矢量控制 P101 电机额定电压 P102 电机额定电流 P107 电机额定频率HZ P108 电机额定速度RPM P114=0 P368=0 设定和命令源为PMU+MOP P370=1 启动简单应用参数设置 P60=0 结束简单应用参数设置 执行上述参数设定后,变频器自动组合功能图连接和参数设定。P368 选择的功能图见手 册S0-S7,P100 选择的功能图见手册R0-R5。电机控制效果非最优。 1.3 系统参数设置 P60=5 P115=1 电机模型自动参数设置,根据电机参数设定自动计算 P130=10 无编码器 11 有编码器(P151 编码器每转脉冲数) P350=电流量参考值A P351=电压量参考值V P352=频率量参考值HZ 3 3 P353=转速量参考值1/MIN P354=转矩量参考值NM P452=正向旋转最大频率或速度%(100%=P352,P353) P453=反向旋转最大频率或速度%(100%=P352,P353) P60=1 回到参数菜单,不合理的参数设置导致故障 1.4 补充参数设定如下 P128=最大输出电流A P571.1=6 PMU 正转 P572.1=7 PMU 反转 非标控制盘柜钣金技术参数标准一、项目概况: □室内□室外 三、外形尺寸:(见附表二) □自立式□壁挂式□并联式□仿威图 五、材质说明: 1)柜体: □ 1.5mm冷板□ 2.0mm冷板□ 2.5mm冷板 □ 1.5mm不锈钢□ 2.0mm不锈钢□其它___________ 2)安装板: □ 1.5mm冷板□ 2.0mm冷板□ 2.5mm冷板 □ 1.5mm热锌□ 2.0mm热锌□ 2.5mm热锌3)其它附件: □ 1.5mm冷板□ 2.0mm冷板□ 2.5mm冷板 □ 1.5mm不锈钢□ 2.0mm不锈钢□其它___________ 六、表面处理: 1)柜体及附件表面处理: ①喷粉形式: □平纹□橘纹□不喷□其它__________ ②喷粉颜色: □ RAL7035 □ 5Y7/1 □其它________________ 2)安装板: □冷板镀白锌□锌板(边缘防锈处理)□其它__________________ 七、结构: 1)吊耳:□ 2个□ 4个□无 2)通风系统:□百叶窗□风机开圆孔□风机开方孔□无 3)出线方式:□底板小圆孔□底板大方孔加挡板□其它_____________ 4)底座样式: □无□柜体一体式□板材折弯焊接 □仿威图底座(高度:□ 80mm □ 100mm □ 150mm) □角钢焊接式 ①角钢规格 □ 40*40*3 □ 40*40*4 □ 40*40*5 □ 50*50*4 □ 50*50*5 ②底座高度□ 200mm □ 300mm □ 400mm □ 500mm □ 600mm □槽钢钢焊接式 槽钢规格□ 8# (80*43*43)□ 10# (100*48*48)□ 16# (160*65*65)5)柜门:□单门□双门□单层门□双层门□后门 6)框架:□角钢□扁钢□型材□无 7)其它可选结构: □防雨顶盖□出线孔橡胶圈□柜内照明系统支架□墙壁挂架 □门内侧加强筋□门内侧资料框□底座固定孔和柜体固定孔 八、防护等级:(见附表一) 柜体外壳要求防护等级为: □ IP54 □ IP53 □ IP52 □ IP44 □ IP43 □ IP42 □其它________ 九、附件: 1)锁具: ①品牌:□生久□星本□普通 ②类型:□平面锁□连杆锁□把手锁□圆柱锁□面板锁□搭扣 2)铰链: ①品牌:□生久□星本□普通②类型:□ 90°□ 110°□ 130°□ 180°□其它______ 附表一:柜体IP防护等级各要素及含义 840D sl常用参数 1:MD9422 预置功能0---未出现任何软键 1---出现“预设”软键 2---出现“设计实际值”软键 2:整定值分配MD 30110 CTRLOUT_MODULE_NR 整定值分配:通讯时隙。 用作MD13050 中I/O 地址表中的指针。 若不使用p978,则它相应于驱动器编号,例如: CU 或CU/ALM 之后的6 个驱动器: 1 ~ 6 NX10 的3 个驱动器:7 ~ 9 整定值类型MD 30130 CTRLOUT_TYPE 1 整定值输出 0 仿真 编号MD 30200 NUM_ENCS 测量系统 1 单位置测量系统 2 双位置测量系统 可通过IS DB31.DBX1.5/1.6 来选择测量系统1 或2 索引[n] 测量系统机床数据具有索引[0] 或[1]。 [0] 第1 个测量系统的值 [1] 第2 个测量系统的值 实际值分配MD 30220 ENC_MODULE_NR[n] 实际值分配: 通讯时隙。实际值输入MD 30230 ENC_INPUT_NR[0] SINAMICS 编码器编号(值1/2/3 表示第1/2/3 个SINAMICS 编码器) 编码器类型MD 30240 ENC_TYPE[n] 1 增量型编码器(MD34200=1) 4 绝对值编码器(MD34200=0) 0 仿真 极性实际值MD 32110 ENC_FEEDBACK_POL [n] 0/1 默认值 -1 极性改变 运动方向MD 32100 AX_MOTION_DIR 0/1 默认值 -1 返回方向 3:光栅尺MD 31000 ENC_IS_LINEAR [n] 1 用于实际位置值采集的编码器为直线编码器(光栅尺)。 0 用于实际位置值采集的编码器是旋转编码器。 直接MD 31040 ENC_IS_DIRECT [n] 测量系统 1 用于检测实际位置值的编码器直接位于机床上。 0 用于检测实际位置值的编码器直接位于电机上。 增量数MD 31020 ENC_RESOL [n] 旋转测量系统中编码器旋转一圈的增量数。 电机测量系统每圈的增量数为2048。 光栅尺刻度MD 31010: ENC_GRID_POINT_DIST 直线测量系统的刻度格间距,[mm] 840d中文参数 [sell=200] 10000 机床轴名称 10002 NCK机械轴的逻辑图 10008 PLC 控制的轴的最大号码 10010 方式组的通道有效 10050 基本系统循环时间10059 Profibus 报警标识符(只对内部) 10060 位置控制循环系数 10061 位置控制循环 10062 位置控制循环延迟 10065 位置设定延迟 10070 插补运算器的周期系数 10071 插补循环 10072 通讯任务周期的系数10074 PLC任务比插补任务的系数 10075 PLC循环时间 10080 取样实际值分配系数 10082 速度设定输出的超前时间10083 位置控制器输出保持时间的偏置10085 中断程序段监控时间(失效-激活) 10088 重新启动延迟 10089 缺少总线时脉冲抑制的等待时间10090 监控周期的系数 10091 检查周期时间的显示 10092 安全数据再确认循环时间显示 10093 SPL文件存取号 10094 安全报警禁用级 10095 安全方式屏蔽 10096 安全诊断功能 10097 对于SPL-差额停止反应 10098 PROFIsafe 通讯的系数 10099 PROFI安全通讯循环时间 10100 最大PLC周期 10110 PLC确认的平均时间 10120 PLC启动的监控时间 10130 与MMC通讯的时间限制 10131 过载时屏幕更新处理10132 在零件程序中监控时间MMC命令10134 同时发生的MMC节点数量10136 PCS位置的显示方式 10140 与驱动通讯的时间限制 10150 与驱动通讯的系数 10160 与MMC通讯的系数 10165 预留: 10170 MMC任务的启动时间限制 10180 MMC任务到准备任务的系数 10185 NCK运行时间分量 10190 模拟的换刀时间 ABB断路器参数调试讲义 电控柜的断路器进行设置,在ABB塑壳断路器(正面)下方有两个旋钮(见下图),通过调节旋钮的位置可以设置断路器的过流、过载保护值,具体设置方法如下: 一、ABB塑壳断路器过流、过载旋钮设置说明: 1、过流调节旋钮,设置电控箱整个负载的过流保护值,调节范围从2000A—4000A,从MIN—MED—MAX共有9个档位,档位对应值如下: MIN(1)档—2000A; (2)档—2250A; (3)档—2500A; (4)档—2750A; MED(5)档—3000A; (6)档—3250A; (7)档—3500A; (8)档—3750A; MAX(9)档—4000A; 2、过载调节旋钮,设置电控箱整个负载的过载保护值,调节范围从280A—400A,从MIN—MED—MAX共有9个档位,档位对应值如下: 过流调节 旋钮 过载调节 旋钮 MIN(1)档—280A; (2)档—295A; (3)档—310A; (4)档—325A; MED(5)档—340A; (6)档—355A; (7)档—370A; (8)档—385A; MAX(9)档—400A; 二、ABB断路器机型设置说明 机型号 供电电 压(V) 油泵功率 (KW) 系统电流 值 断路器参数设置 断路器容 量 过载值调 整 过流值调 整 EBZ100型38055400A1档1档 EBZ132型38055400A1档1档38075400A1档1档 EBZ160型38075400A1档1档38090400A1档1档380110400A1档1档 EBZ200型380110400A3档1档380132400A4档1档 EBZ200H型380110400A3档1档380132400A4档1档 EBZ10038055400A2档1档 EBZ132型38055400A5档1档38075400A6档1档 EBZ160型38075400A8档2档38090400A9档2档380110400A9档2档 EBZ230380132400A7档2档 EBZ260H 380132400A7档2档380160400A8档2档 EBZ318H380200400A9档3档 三ABB断路器低压断路器的参数详解 3.1、空气断路器的框架电流Iu、额定电流Ie、额定电流整定值Ir的含义是什么 框架电流Iu: 又称为额定不间断电流。指在规定条件下,电器在长期工作制下,各部件 的温升不超过规定极限值时所承受的电流值。 额定工作电流Ie: 指在规定条件下,能保证电器正常工作的电流值。它和额定电压、电网频 siemens 840d参数中文含义 840d中文参数 [sell=200] 10000 机床轴名称 10002 nck机械轴的逻辑图 10008 plc 控制的轴的最大号码 10010 方式组的通道有效 10050 基本系统循环时间 10059 profibus 报警标识符(只对内部) 10060 位置控制循环系数 10061 位置控制循环 10062 位置控制循环延迟 10065 位置设定延迟 10070 插补运算器的周期系数 10071 插补循环 10072 通讯任务周期的系数 10074 plc任务比插补任务的系数 10075 plc循环时间 10080 取样实际值分配系数 10082 速度设定输出的超前时间 10083 位置控制器输出保持时间的偏置10085 中断程序段监控时间(失效-激活) 10088 重新启动延迟 10089 缺少总线时脉冲抑制的等待时间10090 监控周期的系数 10091 检查周期时间的显示 10092 安全数据再确认循环时间显示10093 spl文件存取号 10094 安全报警禁用级 10095 安全方式屏蔽 10096 安全诊断功能 10097 对于 spl-差额停止反应 10098 profisafe 通讯的系数 10099 profi安全通讯循环时间 10100 最大plc周期 10110 plc确认的平均时间 10120 plc启动的监控时间 10130 与mmc通讯的时间限制 10131 过载时屏幕更新处理 10132 在零件程序中监控时间mmc命令 10134 同时发生的mmc节点数量 10136 pcs位置的显示方式 10140 与驱动通讯的时间限制 10150 与驱动通讯的系数 10160 与mmc通讯的系数 10165 预留: 10170 mmc任务的启动时间限制 10180 mmc任务到准备任务的系数 10185 nck运行时间分量 10190 模拟的换刀时间 10192 齿轮换挡时间 10200 线性位置的计算精度 10210 角度位置的计算精度 10220 激活比例系数 10230 机床数据比例系数 10240 基本公制长度单位 10250 inch的转换系数 10260 有效转换的基本设定 10270 位置表的比例系统 10280 对rel.6.3的比较>和0(3的一般/t方向最小角度21084 一般/路径最小角度(3d 端面切削) 21090 空间定位程序的最大导引角 21092 空间方向定位的最大倾斜角 变频控制柜调试说明书 (一),使用前准备-----------------------------------------------------2 (二),送电调试--------------------------------------------------------4 (三),变频器调试----------------------------------------------------5 ★14组继电器输出调整----------------------------6 ★32组监控器调整--------------------------------7★40组PID控制1调整 ---------------------------10★加减泵条件------------------------------------14★参数备份--------------------------------------15 (四),压力设定流程图---------------------------------------------16 (五),压力不稳定调节---------------------------------------------17 (六),常见故障分析------------------------------------------------17 (七),附录变频器ACS510 (PID宏+PLC)参数表-------------19 川源(中国)机械有限公司 (一),变频控制柜调试说明书 一、使用前准备: 变频控制柜 1,检查控制柜负载能力与水泵电机功率是否相符。控制柜是否符合当地环境要求,是否符合设计需求。 2,检查柜内元件有无脱落,接线是否有不牢、不良的迹象。重新紧固电路螺丝。 【最新整理,下载后即可编辑】 ABB 断路器参数调试讲义 电控柜的断路器进行设置,在ABB 塑壳断路器(正面)下方有两个旋钮(见下图),通过调节旋钮的位置可以设置断路器的过流、过载保护值,具体设置方法如下: 一、ABB 塑壳断路器过流、过载旋钮设置说明: 1、过流调节旋钮,设置电控箱整个负载的过流保护值,调节范围从2000A —4000A ,从MIN —MED —MAX 共有9个档位,档位对应值如下: MIN (1)档—2000A; (2)档—2250A; (3)档—2500A; (4)档—2750A; MED (5)档—3000A; (6)档—3250A; (7)档—3500A; (8)档—3750A ; MAX (9)档—4000A; 2、过载调节旋钮,设置电控箱整个负载的过载保护值,调节范 过流调节旋钮 过载调节 旋钮 围从280A—400A,从MIN—MED—MAX共有9个档位,档位对应值如下: MIN(1)档—280A; (2)档—295A; (3)档—310A; (4)档—325A; MED(5)档—340A; (6)档—355A; (7)档—370A; (8)档—385A; MAX(9)档—400A; 二、ABB断路器机型设置说明 3.1、空气断路器的框架电流Iu、额定电流Ie、额定电流整定值 Ir的含义是什么? ?框架电流Iu: 又称为额定不间断电流。指在规定条件下,电器在长期 工作制下,各部件的温升不超过规定极限值时所承受的 电流值。 ?额定工作电流Ie: 指在规定条件下,能保证电器正常工作的电流值。它和 额定电压、电网频率、额定工作制、使用类别、触头寿 命及防护等级等因素有关。有时被标识为In。 ?额定电流整定值Ir: 这是使用者通过断路器的脱扣器自行整定的一个电流 值,断路器根据使用者整定的Ir对电路进行过载、短路 保护。 ?比如ABB的塑壳断路器S5N400 R320 PR112/LI FF 3P , Iu=400A Ie=320A, Ir=( 0.4 – 1)Ie 可调。 3.2、极限短路分断能力Icu、额定运行短路能力Ics、短时耐受 电流Icw的含义是什么? ?极限短路分断能力Icu 断路器在承受此短路电流时必须可靠的分断短路故障,但不要求断路器未经过维修或更换零件的条件下能继续使用。 ?额定运行短路能力Ics 断路器在承受此短路电流时必须可靠的分断短路故障, 但要求断路器在未经过维修或更换零件的条件下能继续 再次使用。 Ics必定小于或等于Icu,一般用Ics = xx % Icu 表示。 A断路器参数调试讲义 全 标准化工作室编码[XX968T-XX89628-XJ668-XT689N] ABB断路器参数调试讲义 电控柜的断路器进行设置,在ABB塑壳断路器(正面)下方有 1、过流调节旋钮,设置电控箱整个负载的过流保护值,调节范围从2000A—4000A,从MIN—MED—MAX共有9个档位,档位对应值如下: MIN(1)档—2000A; (2)档—2250A; (3)档—2500A; (4)档—2750A; MED(5)档—3000A; (6)档—3250A; (7)档—3500A; (8)档—3750A; MAX(9)档—4000A; 2、过载调节旋钮,设置电控箱整个负载的过载保护值,调节范围从280A—400A,从MIN—MED—MAX共有9个档位,档位对应值如下:MIN(1)档—280A; (2)档—295A; (3)档—310A; (4)档—325A; MED(5)档—340A; (6)档—355A; (7)档—370A; (8)档—385A; MAX(9)档—400A; 二、ABB断路器机型设置说明 机型号供电电 压 (V) 油泵功率 (KW) 系统电流 值 断路器参数设置 断路器 容量 过载值 调整 过流值 调整 EBZ100型38055115.0 400A1档1档 EBZ132型38055134.0 400A1档1档38075143.5 400A1档1档 EBZ160型38075159.7 400A1档1档38090171.4 400A1档1档380110181.7 400A1档1档 EBZ200型380110206.1 400A3档1档380132218.1 400A4档1档 EBZ200H型380110206.1 400A3档1档380132218.1 400A4档1档 EBZ10038055196.7 400A2档1档 EBZ132型38055231.7 400A5档1档38075248.9 400A6档1档 EBZ160型38075277.1 400A8档2档38090297.1 400A9档2档380110315.1 400A9档2档 EBZ230380132252.1 400A7档2档 EBZ260H 380132277.2 400A7档2档380160290.4 400A8档2档 EBZ318H380200349.5 400A9档3档 三ABB断路器低压断路器的参数详解 3.1、空气断路器的框架电流Iu、额定电流Ie、额定电流整定值Ir 的含义是什么? 框架电流Iu: 又称为额定不间断电流。指在规定条件下,电器在长期工 作制下,各部件的温升不超过规定极限值时所承受的电流 值。 额定工作电流Ie: 1. 西门子系统数据简介 810D、840D系统参数分为两个大类:机床数据、设定数据。 (请参阅:SINUMERIK 810D 840D 简明调试手册- 2006版本) 机床数据是用于生产、安装、调试用的数据,主要用于设定、匹配机床的主要数据。设定数据主要是机床在使用过程中需要设定的数据,是一些常用的用于调整机床使用性能的数据。 其中机床数据有以下几种类型:通用机床数据、通道机床数据、用于驱动器的机床数据、用于操作面板的机床数据、轴专用机床数据; 设定数据有以下几种类型:通用设定数据、通道专用设定数据、轴专用设定数据。 数据的标识如下: $MM_用于操作面板的机床数据machine manipulate $MN_/$SN_通用机床数据/通用设定数据 $MC_/$SC_通道用机床数据/通道用设定数据machine channel/setting channel $MA_/$SA_轴专用机床数据轴machine axes /setting axes $MD 驱动器机床数据machine drive 表3-1西门子数控系统数据列表 2. 机床数据设定 (请参阅:某数控机床SIEMENS810D系统参数备份) 1) 通用MD(General): MD10000:此参数设定机床所有物理轴,如X轴。 通道MD(Channel Specific): MD20000 → 设定通道名CHAN1 MD20050[n] → 设定机床所用几何轴序号,几何轴为组成笛卡尔坐标系的轴 MD20060[n] → 设定所有几何轴名 MD20070[n] → 设定对于此机床存在的轴的轴序号 MD20080[n] → 设定通道内该机床编程用的轴名 以上参数设定后,做一次NCK复位! 2) 轴相关MD(Axis-specific): MD30130 -→设定轴指令端口=1 MD30240 -→设定轴反馈端口=1 如此二参数为“0”,则该轴为仿真轴。 此时,再一次NCK复位,这是会出现300007报警。 3) 驱动数据设定 配置驱动数据,由于驱动数据较多,对于MMC100.2必须借助“SIMODRIVE 611D START-UP TOOL”软件,而MMC103可直接在OP上进行,大致需要对以下几种参数设定: Location:设定驱动模块的位置 Drive:设定此轴的逻辑驱动号 Active:设定是否激活此模块 配置完成并有效后,需存储一下(SAVE)-→OK 此时再做一次NCK复位。启动后显示300701报警。840d主要参数设定
840D五轴联动的参数
ABB断路器参数调试讲义
ABB断路器参数调试讲义教学提纲
西门子Siemens840D全参数详解
ABB断路器参数调试讲义
西门子840D主要参数意译
电控柜技术规范书
西门子变频器基本参数设置
配电柜柜体钣金参数标准
840D sl常用参数
840d中文参数
ABB断路器参数调试讲义全
siemens 840d参数中文含义
变频控制柜调试培训
ABB断路器参数调试讲义(完整资料).doc
A断路器参数调试讲义全
SINUMERIK810D、840D参数体系及参数的调整
相关主题
文本预览