超定方程组最小二乘解
最小二乘法广泛地应用于工程计算中,用最小二乘法消除(平滑)误差,用最小二乘法从有噪声的数据中提取信号,从海量数据中找出数据变化的趋势,……。甚至利用简单函数计算复杂函数的近似值,我们并不期望它的近似值多么精确(事实上很多时候也不用很精确),尽管如此还是希望计算出的近似数据与原始数据之间有相似之处。如果从线性代数角度来理解最小二乘法,实际上是将一个高维空间的向量投影到低维子空间所涉及的工作。
一、 超定方程组的最小二乘解
当方程组GX=b 的方程数多于未知数个数时,对应的系数矩阵G 的行数大于列数,此时方程组被称为是超定方程组。设G=(g iu )m ×n ,当m>n 时即所谓的高矩阵,绝大多数情况下,超定方程组没有古典意义下的解。超定方程组的最小二乘解是一种广义解,是指使残差r = b – GX 的2-范数达取极小值的解,即
22*||||min ||||GX b GX b m R
X -=-∈ 该问题是一个优化问题。
命题1:如果X *是正规方程组G T GX=G T
b 的解,则X *是超定方程组GX=b 的最小二乘解 证 由题设可得,G T (b – GX *)=0。对任意n 维向量Y ,显然有 (X * – Y )T G T (b – GX *)=0
考虑残差2-范数平方,由
22**2
2||)()(||||||Y X G GX b GY b -+-=-
上式右端利用内积,得
22*22*22*2
2||||||)(||||||||||GX b Y X G GX b GY b -≥-+-=-
从而有
|| b – GY ||2 ≥ || b – GX *||2
等式仅当Y =X *时成立。所以X *是超定方程组GX=b 的最小二乘解。
命题2:如果X *是超定方程组GX=b 的最小二乘解,则X *满足正规方程组G T GX=G T
b
证 由题设,22*||||min ||||GX b GX b m R X -=-∈,利用2-范数与内积关系,知X *是下面二次函数的极小值点
?(X ) = (GX ,GX ) – 2(GX ,b ) + (b ,b )
取任意n 维向量v ,对任意实数t ,构造一元函数
g (t ) = ?(X * + t v )
显然, g (t ) 是关于变量t 的二次函数
g (t ) = (G (X * + t v ),G (X * + t v )) – 2(G (X * + t v ),b ) + (b ,b )
= g (0) + 2t [(GX *,Gv ) – (Gv ,b )]+ t 2 (Gv ,Gv )
由题设t =0是g (t )的极小值点。由极值必要条件,得0)0(='g 。即
(GX *,Gv ) – (Gv ,b )=0
将左端整理化简,便得
(Gv ,GX * – b ) =0
利用内积性质,得
( v ,G T (GX * – b ) )=0
由v 的任意性,得G T
(GX * – b ) =0
二、 最小二乘解的几何意义 首先考虑一个简单的超定方程组
????
??????=????????????????-6311215342y x 该方程组的右端向量是三维向量,系数矩阵的每一列也是三维向量,但待求的未知向量却是二维向量。将系数矩阵按列分块,G =[α1,α2],记右端向量为β。则方程组求解问题可表示为求组合系数x 和y 使
x α1 + y α2 = β
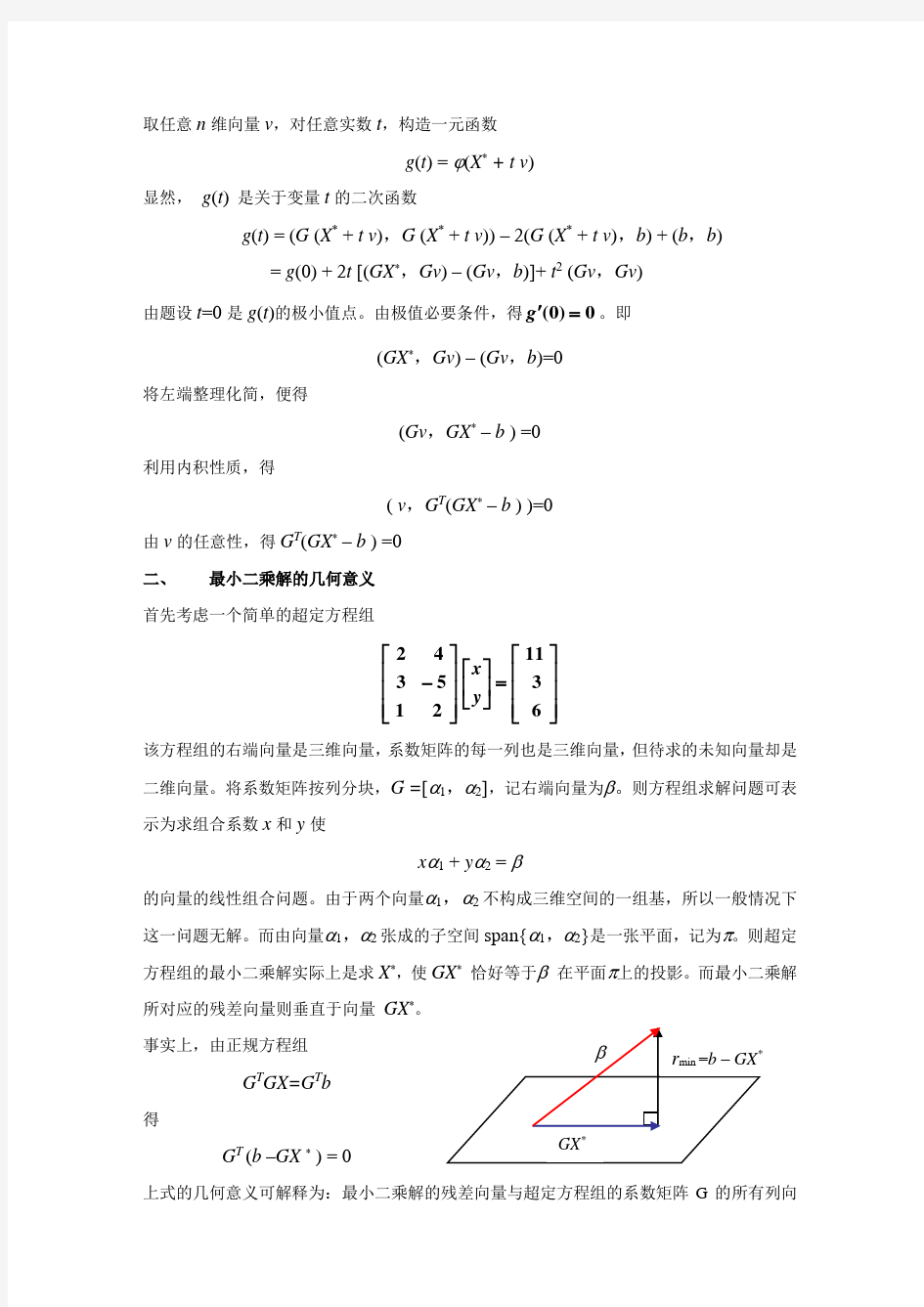
的向量的线性组合问题。由于两个向量α1,α2不构成三维空间的一组基,所以一般情况下这一问题无解。而由向量α1,α2张成的子空间span{α1,α2}是一张平面,记为π。则超定方程组的最小二乘解实际上是求X *,使GX * 恰好等于β 在平面π上的投影。而最小二乘解所对应的残差向量则垂直于向量GX *。
事实上,由正规方程组 G T GX=G T b
得
G T (b –GX *
) = 0 上式的几何意义可解释为:最小二乘解的残差向量与超定方程组的系数矩阵G 的所有列向
量正交。从而
(X*)T G T (b –GX*) = 0 所以
(GX*,b –GX*) = 0
一、引言 合成孔径雷达干涉测量技术(synthetic aperture radar interferometry, InASR)将合成孔径雷达成像技术与干涉测量技术成功地进行了结合,利用传感器高度、雷达波长、波束视向及天线基线距之间的几何关系,可以精确的测量出图像上每一点的三维位置和变化信息。 合成孔径雷达干涉测量技术是正在发展中的极具潜力的微波遥感新技术,其诞生至今已近30年。起初它主要应用于生成数字高程模型(DEM)和制图,后来很快被扩展为差分干涉技术( differential InSAR , DInSAR)并应用于测量微小的地表形变,它已在研究地震形变、火山运动、冰川漂移、城市沉降以及山体滑坡等方面表现出极好的前景。特别,DInSAR具有高形变敏感度、高空间分辨率、几乎不受云雨天气制约和空中遥感等突出的技术优势,它是基于面观测的空间大地测量新技术,可补充已有的基于点观测的低空间分辨率大地测量技术如全球定位系统(GPS)、甚长基线干涉(VLBI)和精密水准等。尤其InSAR在地球动力学方面的研究最令人瞩目。 二维相位解缠是InSAR 数据处理流程中重要步骤之一,也是主要误差来源,无论是获取数字高程模型还是获取地表形变信息,其精确程度都高度依赖于有效的相位解缠。因此,本人在课程期间对相位解缠的相关文献进行了阅读。 二、InSAR基本原理
用两副雷达天线代替两个光源1S ,2S ,对地面发射相干信号,将 得到类似的条纹图。因为雷达信号与光线本质上都是电磁波,所以只要保证雷达天线载具运行轨道的稳定,那么两个信号到达地面上某一点处的路程差是确定的,只与该点在地面上的位置有关。在 InSAR 干涉测量中有两种模式,一种是在载具(卫星或飞机)上搭载一具天线,而载具两次通过不同轨道航线飞经目标地域上空,此种称之为单天线双航过模式;另一种在载具上搭载两副天线,只飞经目标地域上空一次,此种方式称之为双天线单航过模式。不论是哪种方式都可以用图 2.2 来模拟并作出几何解释。 在测量中两副天线或两次航过接收的数据可以各获得对地面同一区域的两幅包含幅值与相位信息的二维复数据图像,分别以1S ,2S 表示为 111114||exp()||exp()j r S S S π?λ==
根据解的存在情况,线性方程可以分为: 有唯一解的恰定方程组, 解不存在的超定方程组, 有无穷多解的欠定方程组。 对于方程组Ax=b,A为n×m矩阵,如果A列满秩,且n>m。则方程组没有精确解,此时称方程组为超定方程组。 线性超定方程组经常遇到的问题是数据的曲线拟合。对于超定方程,在MATLAB 中,利用左除命令(x=A\b)来寻求它的最小二乘解; 还可以用广义逆来求,即x=pinv(A),所得的解不一定满足Ax=b,x只是最小二乘意义上的解。 左除的方法是建立在奇异值分解基础之上,由此获得的解最可靠; 广义逆法是建立在对原超定方程直接进行householder变换的基础上,其算法可靠性稍逊与奇异值求解,但速度较快; 独立方程个数大于独立的未知参数的个数的方程,称为超定方程,在matlab里面有三种方法求解, 一是用伪逆法求解,x=pinv(A)*b,二是用左除法求解,x=A\b,三是用最小二乘法求解, x=lsqnonneg(A,b) (3)矩阵求逆 行数和列数相等的矩阵称为方阵,只有方阵有逆矩阵。方阵的求逆函数为: B=inv(A) 该函数返回方阵A的逆阵。如果A不是方阵或接近奇异的,则会给出警告信息。 在实际应用中,很少显式的使用矩阵的逆。在MATLAB中不是使用逆阵x=inv(A)*B来求线性方程组Ax=B的解, 而是使用矩阵除法运算x=A\B来求解。因为MATLAB设计求逆函数inv时,采用的是高斯消去法,而设计除法解线性方程组时, 并不求逆,而是直接采用高斯消去法求解,有效的减小了残差,并提高了求解的速度。 因此,MATLAB推荐尽量使用除法运算,少用求逆运算。 (4)除法运算 在线性代数中,只有矩阵的逆的定义,而没有矩阵除法的运算。而在MATLAB 中,定义了矩阵的除法运算。
第五章 最小二乘问题的解法 1.最小二乘问题 1)回归方程问题 []T i i l i y t t )() ()(1 ,,...,,m i ,...,2,1=是m 个实验点。现要根据这些点确定y 与l 个物理量 l t t t ,...,,21之间的关系式。 设这种关系式为),...,,,...,(11n l x x t t F y =,其中n x x ,...,1是方程中需要待定的n 个参数(系数)。 因此问题是如何通过)(n m m >个实验点,确定方程中的系数。 由于实验点的个数大于待定系数的个数,因此方程中系数的确定是一个超静定问题,无法按一般的方法进行求解。 此时将实验点到曲面距离最短的那个曲面作为所求曲面,从而求取该曲面方程。 即求解[]∑=-m i i i y x t F 12 )()(),(min ,这就是最小二乘问题。 2)非线性方程组问题 求解非线性方程组?? ? ?? ??===0),...,(. 0 ),...,(0 ),...,(11211n n n n x x f x x f x x f 可转化为求解如下形式的最小二乘问题。 ∑ =m i n i x x f 1 12 ),...,(min 显而易见,最小二乘法的一般形式可写为)()(min x f x f T 最小二乘法问题实际上是具有n 个变量的无约束极小化问题,前面解无约束优化问题的方法均可应用。 但是最小二乘问题具有一定的特殊性,即目标函数的表达式是由多个表达
式的平方和组成,理应有更、更有效的方法。这正是最小二乘解法要解决的问题。 2.线性最小二乘问题的解法 最小二乘法的一般形式可写为)()(min x f x f T 特别地,当b Ax x f -= )(,即)(x f 为线性函数时,则最小二乘问题可表示为: 2 min b Ax - 1) 线性最小二乘问题解的条件 定理1:*x 是线性最小二乘问题极小点的充要条件是*x 满足b A Ax A T T =。 证明:(1)必要性 令2 )(b Ax x s -= ,于是有: b b Ax b b A x Ax A x b Ax b A x b Ax b Ax x s T T T T T T T T T T +--=--=--=))(()()()( 由于b A x T T 是一个数,而一个数的转置是它的本身,因此有: Ax b A x b b A x b A x T T T T T T T T T T ===) () ( 故上式可化为:b b Ax b Ax A x x s T T T T +-= 2)( b A Ax A x s T T 22)(-=? 若*x 是)(x s 的极小点,则必有0)(=?x s ,则必有:b A Ax A T T = (2)充分性 若*x 满足b A Ax A T T =* ,即0)(*=-b Ax A T 考虑任一点n R z x v ∈+=*,计算
matlab 超定方程最小二乘解 2011-04-09 06:36:47| 分类:学习| 标签:超定方程最小二乘|字号订阅 根据解的存在情况,线性方程可以分为: 有唯一解的恰定方程组, 解不存在的超定方程组, 有无穷多解的欠定方程组。 对于方程组Ax=b,A为n×m矩阵,如果A列满秩,且n>m。则方程组没有精确解,此时称方程组为超定方程组。 线性超定方程组经常遇到的问题是数据的曲线拟合。对于超定方程,在MATLAB中,利用左除命令(x=A\b)来寻求它的最小二乘解; 还可以用广义逆来求,即x=pinv(A),所得的解不一定满足Ax=b,x只是最小二乘意义上的解。 左除的方法是建立在奇异值分解基础之上,由此获得的解最可靠; 广义逆法是建立在对原超定方程直接进行householder变换的基础上,其算法可靠性稍逊与奇异值求解,但速度较快; 独立方程个数大于独立的未知参数的个数的方程,称为超定方程,在matlab里面有三种方法求解, 一是用伪逆法求解,x=pinv(A)*b,二是用左除法求解,x=A\b,三是用最小二乘法求解, x=lsqnonneg(A,b) (3)矩阵求逆 行数和列数相等的矩阵称为方阵,只有方阵有逆矩阵。方阵的求逆函数为: B=inv(A) 该函数返回方阵A的逆阵。如果A不是方阵或接近奇异的,则会给出警告信息。
在实际应用中,很少显式的使用矩阵的逆。在MATLAB中不是使用逆阵x=inv(A)*B来求线性方程组Ax=B的解, 而是使用矩阵除法运算x=A\B来求解。因为MATLAB设计求逆函数inv时,采用的是高斯消去法,而设计除法解线性方程组时, 并不求逆,而是直接采用高斯消去法求解,有效的减小了残差,并提高了求解的速度。 因此,MATLAB推荐尽量使用除法运算,少用求逆运算。 (4)除法运算 在线性代数中,只有矩阵的逆的定义,而没有矩阵除法的运算。而在MATLAB中,定义了矩阵的除法运算。 矩阵除法的运算在MATLAB中是一个十分有用的运算。根据实际问题的需要,定义了两种除法命令:左除和右除。 矩阵左除: C=A\B或C=mldivide(A,B) 矩阵右除; C=A/B或C=mrdivide(A,B) 通常矩阵左除不等于右除, 如果A是方阵,A\B等效于A的逆阵左乘矩阵B。也就是inv(A)*B。 如果A是一个n*n矩阵,B是一个n维列向量,或是有若干这样的列的矩阵,则A\B就是采用高斯消去法求得的方程AX=B的解。 如果A接近奇异的,MATLAB将会给出警告信息。 如果A是一个m*n矩阵,其中m不等于n,B是一个m维列向量,或是由若干这样的列的矩阵,
精品文档 超定方程组最小二乘解 最小二乘法广泛地应用于工程计算中,用最小二乘法消除(平滑)误差,用最小二乘法从有噪声的数据中提取信号,从海量数据中找出数据变化的趋势,……。甚至利用简单函数计算复杂函数的近似值,我们并不期望它的近似值多么精确(事实上很多时候也不用很精确),尽管如此还是希望计算出的近似数据与原始数据之间有相似之处。如果从线性代数角度来理解最小二乘法,实际上是将一个高维空间的向量投影到低维子空间所涉及的工作。 一、 超定方程组的最小二乘解 当方程组GX=b 的方程数多于未知数个数时,对应的系数矩阵G 的行数大于列数,此时方程组被称为是超定方程组。设G=(g iu )m ×n ,当m>n 时即所谓的高矩阵,绝大多数情况下,超定方程组没有古典意义下的解。超定方程组的最小二乘解是一种广义解,是指使残差r = b – GX 的2-范数达取极小值的解,即 22*||||min ||||GX b GX b m R X -=-∈ 该问题是一个优化问题。 命题1:如果X *是正规方程组G T GX=G T b 的解,则X *是超定方程组GX=b 的最小二乘解 证 由题设可得,G T (b – GX *)=0。对任意n 维向量Y ,显然有 (X * – Y )T G T (b – GX *)=0 考虑残差2-范数平方,由 22**2 2||)()(||||||Y X G GX b GY b -+-=- 上式右端利用内积,得 22*22*22*2 2||||||)(||||||||||GX b Y X G GX b GY b -≥-+-=- 从而有 || b – GY ||2 ≥ || b – GX *||2 等式仅当Y =X *时成立。所以X *是超定方程组GX=b 的最小二乘解。 命题2:如果X *是超定方程组GX=b 的最小二乘解,则X *满足正规方程组G T GX=G T b
超定方程组最小二乘解课程设计 最小二乘法广泛地应用于工程计算中,用最小二乘法消除(平滑)误差,用最小二乘法从有噪声的数据中提取信号,从海量数据中找出数据变化的趋势,……。甚至利用简单函数计算复杂函数的近似值,我们并不期望它的近似值多么精确(事实上很多时候也不用很精确),尽管如此还是希望计算出的近似数据与原始数据之间有相似之处。如果从线性代数角度来理解最小二乘法,实际上是将一个高维空间的向量投影到低维子空间所涉及的工作。 一、超定方程组的最小二乘解 当方程组GX=b 的方程数多于未知数个数时,对应的系数矩阵G 的行数大于列数,此时方程组被称为是超定方程组。设G=(g iu )m ×n ,当m>n 时即所谓的高矩阵,绝大多数情况下,超定方程组没有古典意义下的解。超定方程组的最小二乘解是一种广义解,是指使残差r = b – GX 的2-范数达取极小值的解,即 22*||||min ||||GX b GX b m R X -=-∈ 该问题是一个优化问题。 命题1:如果X *是正规方程组G T GX=G T b 的解,则X *是超定方程组GX=b 的最小二乘解 证 由题设可得,G T (b – GX *)=0。对任意n 维向量Y ,显然有 (X * – Y )T G T (b – GX *)=0 考虑残差2-范数平方,由 2 2**22||)()(||||||Y X G GX b GY b -+-=- 上式右端利用内积,得 2 2*22*22*22||||||)(||||||||||GX b Y X G GX b GY b -≥-+-=- 从而有 || b – GY ||2 ≥ || b – GX *||2 等式仅当Y =X *时成立。所以X *是超定方程组GX=b 的最小二乘解。 命题2:如果X *是超定方程组GX=b 的最小二乘解,则X *满足正规方程组G T GX=G T b 证 由题设,22* ||||min ||||GX b GX b m R X -=-∈,利用2-范数与内积关系,知X *是下面二次函数的极小值点 ?(X ) = (GX ,GX ) – 2(GX ,b ) + (b ,b ) 取任意n 维向量v ,对任意实数t ,构造一元函数 g (t ) = ?(X * + t v ) 显然, g (t ) 是关于变量t 的二次函数 g (t ) = (G (X * + t v ),G (X * + t v )) – 2(G (X * + t v ),b ) + (b ,b ) = g (0) + 2t [(GX *,Gv ) – (Gv ,b )]+ t 2 (Gv ,Gv ) 由题设t =0是g (t )的极小值点。由极值必要条件,得0)0(='g 。即 (GX *,Gv ) – (Gv ,b )=0 将左端整理化简,便得 (Gv ,GX * – b ) =0
实验24 人口预测的最小二乘模型 表 24-1 世界人口数据(单位 亿) 年 1960 1961 1962 1963 1964 1965 1966 1967 1968 人口 29.72 30.61 31.51 32.13 32.34 32.85 33.56 34.20 34.83 根据表中数据,预测公元2000年世界人口会超过 60亿。作出这一预测结果所用 的方法就是数据拟合方法。 一、问题分析 据人口增长的统计资料和人口理论,当人口总数 N 不是很大时,在不长的 时期内,人口增长率与人口数 N 成正比,这就是著名的马尔萨斯人口模型,用微 分方程描述为 由此可知,马尔萨斯模型是人口数量按指数函数递增的模型。由于指数函数表达 式中a 和b 均未知,需要用人口数据来确定。即用指数函数对数据进行拟合,确 定指数函数中参数使指数函数与人口数据偏差(残差平方和)尽可能小。下图是 经数所拟合后的指数函数图形与原始数据散点图的对比,残差平方和为 3.6974 杓-4 为了计算方便,将上式两边冋取对数,还原为 y = ln N 或 In N = a + b t ,令 N = e y 变换后的拟合函数为 dN dt bN 其中,b 为人口增长系数。用分离变量法解常微分方程,得 N(t) a bt e (24.1) In N = b t + a ,即 (24.2) 图24-1指数函数图形与原始数据散点图
y(t) = a + b t (24-3) 由人口数据取对数(y = In N )计算,得下表 表24-2世界人口数据(单位:亿) 二、求解超定方程组的数学原理 根据表中数据及等式a + b t k = y k ( k = 1, 2, ……,9)可列出关于两个未知数 a、b的9个方程的线性方程组 a 1960 b 3.3918 a 1961 b 3.4213 a 1962 b 3.4503 a 1963 b 3.4698 a 1964 b 3.4763 a 1965 b 3.4920 a 1966 b 3.5133 a 1967 b 3.5322 a 1968 b 3.5505 (24-4) 由于这一问题中方程数目多于未知数个数,被称为超定方程组,用矩阵形式表示为 AU = f (24-5) 显然A矩阵的行数大于列数。求解这一类方程组的数学原理是将等式左、右同时 乘以A的转置矩阵,得新的线性方程组 A T AU =A T f (24-6) 令G =A T A, b = A T f。得系数矩阵为方阵的线性方程组。 GU=b 求解得原方程组的最小二乘解(广义解)。由于原方程组一般无解,将最小二乘解 代入下式计算 R = f -A U (24-7) 通常会得非零向量,这一向量称为残差。残差的内积可以用来度量最小二乘解的 逼近程度。 三、问题求解的计算机实验 输入下面命令
最小二乘最优问题(转) 默认分类2009-05-21 14:56:33 阅读62 评论1 字号:大中小 1.约束线性最小二乘 有约束线性最小二乘的标准形式为 sub.to 其中:C、A、Aeq 为矩阵;d、b、beq、lb、ub、x 是向量。 在MA TLAB5.x 中,约束线性最小二乘用函数conls 求解。 函数lsqlin 格式x = lsqlin(C,d,A,b) %求在约束条件下,方程Cx = d 的最小二乘解x。 x = lsqlin(C,d,A,b,Aeq,beq) %Aeq、beq 满足等式约束,若没有不等式约束,则设A=[ ],b=[ ]。 x = lsqlin(C,d,A,b,Aeq,beq,lb,ub) %lb、ub 满足,若没有等式约束,则Aeq=[ ],beq=[ ]。 x = lsqlin(C,d,A,b,Aeq,beq,lb,ub,x0) % x0 为初始解向量,若x 没有界,则lb=[ ],ub=[ ]。 x = lsqlin(C,d,A,b,Aeq,beq,lb,ub,x0,options) % options 为指定优化参 数 [x,resnorm] = lsqlin(...) % resnorm=norm(C*x-d)^2,即2-范数。 [x,resnorm,residual] = lsqlin(...) %residual=C*x-d,即残差。 [x,resnorm,residual,exitflag] = lsqlin(...) %exitflag 为终止迭代的条 件 [x,resnorm,residual,exitflag,output] = lsqlin(...) % output 表示输出
超定方程组最小二乘 解
精品文档 收集于网络,如有侵权请联系管理员删除 超定方程组最小二乘解 最小二乘法广泛地应用于工程计算中,用最小二乘法消除(平滑)误差,用最小二乘法从有噪声的数据中提取信号,从海量数据中找出数据变化的趋 势,……。甚至利用简单函数计算复杂函数的近似值,我们并不期望它的近似值多么精确(事实上很多时候也不用很精确),尽管如此还是希望计算出的近似数据与原始数据之间有相似之处。如果从线性代数角度来理解最小二乘法,实际上是将一个高维空间的向量投影到低维子空间所涉及的工作。 一、 超定方程组的最小二乘解 当方程组GX=b 的方程数多于未知数个数时,对应的系数矩阵G 的行数大于列数,此时方程组被称为是超定方程组。设G=(g iu )m ×n ,当m>n 时即所谓的高矩阵,绝大多数情况下,超定方程组没有古典意义下的解。超定方程组的最小二乘解是一种广义解,是指使残差r = b – GX 的2-范数达取极小值的解,即 22*||||min ||||GX b GX b m R X -=-∈ 该问题是一个优化问题。 命题1:如果X *是正规方程组G T GX=G T b 的解,则X *是超定方程组GX=b 的最小二乘解 证 由题设可得,G T (b – GX *)=0。对任意n 维向量Y ,显然有 (X * – Y )T G T (b – GX *)=0 考虑残差2-范数平方,由 22**2 2||)()(||||||Y X G GX b GY b -+-=- 上式右端利用内积,得 22*22*22*2 2||||||)(||||||||||GX b Y X G GX b GY b -≥-+-=-
InSAR图像相位解缠的最小费用流法 及其改进算法研究 蒋廷臣1,2,焦明连1,史建青1,王秀萍 1 (1.淮海工学院测绘工程学院,江苏连云港 222001; 2.武汉大学卫星导航定位技术研究中心,武汉 430079) 摘要:最小费用流法是基于网络流的相位解缠方法,解决了许多解缠方法无法消除相位噪声对高相干区域影响的问题,在此基础上,本文针对该方法解缠时速度较慢和对计算机性能要求较高的缺点而提出改进算法,即将干涉图像分为若干子区域分别进行处 理,再利用基于Contourlet变换的超小波方法进行融合处理,最后用算例进行了验证,结果表明最小费用流法及其改进算法是一个 较好的解缠方法。 关键词:干涉测量相位解缠最小费用流法分块算法小波融合 一、前言 随着测绘新技术新理论的发展,现代大地测量范畴得到了较大拓宽,现在,合成孔径雷达干涉测量(Interferometry Synthetic Aperture Radar—InSAR)已成为其分支学科。合成孔径雷达干涉测量 ( InSAR)利用合成孔径雷达数据的相位信息提取地面三维信息,主要用于测量地面的高程和监测其变形。随着COSMOS和terraSAR卫星的发射成功,该技术日益受到各国政府部门以及科学工作者的重视。 在InSAR数据处理过程中,相位解缠是合成孔径雷达干涉测量的关键流程,它的准确性直接影响到 InSAR生成的数字高程模型的精确性。现在所有的解缠方法都是基于这样的假设,即 φ差的绝对值小于π。解缠后的真实相位是平滑且变化缓慢,同时图像各相邻像素的干涉相位 但是,雷达阴影、去相关等因素引起的噪声和伪信号往往造成相位数据不连续,给相位解缠带来极大的困难,目前大部分算法都无法圆满地解决这些问题 ,解缠的结果常常会有较大的误差,由此得到的数字高程模型就会与实际情况存在较大的差别。如何能够从质量较差的数据当中提取有用的信息,而忽略噪声对解缠过程的影响,成为一个急待解决的问题。 基于上述,本文根据统一的解缠数学模型和网络优化原理,阐述了最小费用流法法的相位解缠方法,并针对该方法解缠时速度较慢而提出分块算法,将整幅图像分为若干子区域分别进行处理 ,再利用超小波方法进行融合处理,从而得到较理想的解缠效果,同时利用算例进行了比较分析,较好地解决了上述问题。 二、最小费用流法解缠原理 2.1统一解缠模型 经过多年对相位解缠方法的研究,现在已有很多的解缠方法。在1996年,Ghiglia和Romero 第一作者简介:蒋廷臣(1975-),男,汉族,四川蓬安人,武汉大学测绘学院博士生,主要从事GPS与宽幅SAR融合的相关理论与方法研究。 第二作者简介:焦明连(1963-),男,汉族,河南商丘人,副教授,主要从事主要从事精密工程测量和测绘教育研究。
精心整理 第四章最小二乘法与组合测量 §1概述 最小二乘法是用于数据处理和误差估计中的一个很得力的数学工具。对于从事精密科学实验的人们来说,应用最小乘法来解决一些实际问题,仍是目前必不可少的手段。例如,取重复测量数据 其后在 x x, , 2 1 n 2 1 显然,最可信赖值应使出现的概率P为最大,即使上式中页指数中的因子达最小,即 权因子: 2 2 o i i w 即权因子 i w∝ 2 1 i ,则 再用微分法,得最可信赖值x
11 n i i i n i i w x x w 即加权算术平均值 这里为了与概率符号区别,以i 表示权因子。 特别是等权测量条件下,有: 以上最可信赖值是在残差平方和或加权残差平方和为最小的意义下求得的,称之为最小二乘法 1x +3x =0.5 2x +3x =-0.3 这是一个超定方程组,即方程个数多于待求量个数,不存在唯一的确定解,事实上,考虑到测量有误差,记它们的测量误差分别为4321,,,v v v v ,按最小二乘法原理 Min v i 2 分别对321,,x x x 求偏导数,令它们等于零,得如下的确定性方程组。
(1x -0.3)+(1x +3x -0.5)=0 (2x +0.4)+(2x +3x +0.3)=0 (1x +3x -0.5)+(2x +3x +0.3)=0 可求出唯一解1x =0.325,2x =-0.425,3x =0.150这组解称之为原超定方程组的最小二乘解。 以下,一般地讨论线性参数测量方程组的最小二乘解及其精度估计。 即 x j ][][][][2211y a x a a x a a x a a t t t t t t 式中,j a ,y 分别为如下列向量 ][k l a a 和][y a j 分别为如下两列向量的内积: ][k l a a =nk nl k l k l a a a a a a 2211 ][y a j =n nj j j y a y a y a 2211
第十四讲 矛盾方程(组)的解---最小二乘法 一、从实验数据处理谈起 设有一组实验数据(t 1,s 1),(t 2,s 2),……,(t n ,s n ),希望由实验数据拟合给定规律,从而测出待测量的有关参数。 假定规律为:2t c +1s=c ,由于存在误差i 2 t c (i 1,2,,n)≠+=i 1s c ,令 1121 22n n t 1s t 1c s A ,x ,b c t 1s ??????????????===???????????? ???????? , 则: Ax=b 实际无解,或者说矩阵方程Ax=b 成为矛盾方程(不自洽、非相容),虽说无解,但在物理上看,我们需要而且也理当有“解”。怎么办? 一般处理是,定义一种目标函数,例如: n 2 12i i 1i 2i i 1E(c ,c )w (s c t c )w 0==-->∑为加权系数 使误差12E(c ,c )最小化。w i =1(i=1~n)时2 122E(c ,c )Ax b -= 二、 最小二乘法(解) 对于矛盾方程Ax=b ,最小二乘法是求其“解”的一种方法。即求使2Ax b min -=的解。 t s
引理:m n A C ?∈设,A{1,3}由如下方程的通解构成: (1,3)(1,3)(1,3)n m AX AA A{1,3}{A (I A A)Z Z C }?=→=+-∈ 其中,A (1,3)为A{1,3}中的某个矩阵。 证:1。方程既然相容,设X 是其某个解,则 (1,3)H (1,3)H (1,3) (i) AXA AA A A X A{1} (iii)(AX)(AA )AA AX X A{3} ==→∈===→∈ 即方程的解必在A{1,3}中。 2。设X 为A 的一个{1,3}-逆矩阵,则 ( )() ()()()iii H H (1,3) (1,3)H (1,3) H H H H (1,3)H H (1,3)(1,3) AX AA AX AA AX A A X A A (AXA)AA AA ====== 即,A 的{1,3}-逆矩阵必满足方程AX=AA (1,3) {} { } (1,3)(1,3) (1,3) n m A{1,3}AX AA A (I A A)Z Z C ?∴==+-∈方程的所有解 = 令(1,3)(1,3)X A I A A)Z =+(-,则 (1,3)(1,3)(1,3) (1,3) (1,3) H (i)AX A AA A AZA AA AZA A X A{1} (iii)AX AA (A AA A)Z A A (AX) X A{3} =+-=∈=+-==∈ 定理:矩阵方程Ax=b 的最小二乘解为 (1,3)x A b =,其中A (1,3)为A 的任何一个{1,3}-逆矩阵,反之,存在X ,对于任何m b C ∈均有Xb 成为Ax=b 的最小二乘解,则X A{1,3}∈。 证明:
InSAR相位解缠最小范数算法的研究 第一章绪论 1.1论文研究的背景 合成孔径雷达干涉测量(InSAR)是20世纪60年代末发展起来的一项技术,在近20年来受到了世界各国的广泛关注获得了迅猛发展并逐渐趋于成熟。由于合成孔径雷达干涉测量主要是利用主动微波式传感器,它的出现大大地扩展了合成孔径雷达、光学传感器等的应用领域。它不仅能够获取高精度的高程信息,同时还可以全天时、全天候监测陆地表面和冰雪表面地形等的微小变化,监测的时间间隔从几天到几年,监测精度可达毫米级,并且它对某些目标物体还具有一定的穿透能力。其更令人瞩目的是,这项技术还可用于研究过去长时间无法到达的冰川和冰源的变化情况,也可用于一些灾害性地表形变的探测,如地震、火山爆发、等以及地表三维的重建,因而成为了遥感研究的热点川。 1.1.2 相位解缠研究的现状 相位解缠技术最早出现在20世纪60年代末70年代初,当时主要是信号处理的需要,所研究的主要是一维问题。除合成孔径雷达干涉测量中应用外,还在合成孔径声纳、光学干涉、微波干涉、核磁共
振等方面有重要应用。二维相位解缠始于20世纪70年代末。在 过去的30多年里,InSAR的相位解缠的方法发展十分迅速,达到了三、四十种,文献(王超,2002)列出了多种算法,但以上基本上可以分为两大类,即路径跟踪法(Path Following)和最小二乘法(Least Square),路径跟踪法基于像元到像元的局部运算来解缠,而最小二乘法是通过使解缠后解缠前相位的梯度差整体最小来进行求解的。 各种算法都有其自身的优缺点,适用于特定条件的数据,普适性都不是很好,因此算法的选择一般应根据实际情况而定。 1.2 本文研究内容 我国是一个地质灾害频繁的国家,近些年来各种地质灾害接踵而来,如地震、滑坡、地面沉降等,这些地质灾害以地表形变为直接特征,严重影响了人民生命与则一产的安全,因此对地表形变的监测显得尤为重要。合成孔径雷达技术能够利用雷达信号中的相位信息来提取地表的三维信息,精度可达毫米级,己成为目前DEM生产的主要技术手段之一,在地下资源探测以及军事目标探测等方面都具有其独特的优越性和发展潜力。相位解缠作为InSAR技术应用处理中至关重要的一个环节,也因此显得尤为重要。 本文主要研究内容包括以下几个方面: 1、对相位解缠中最小范数算法的理论进行归纳和研究. 2、从对合成孔径雷达干涉测量的常用数据分析入手,在C#编程语言的基础上,结合WPS, GIS等技术和手段,对基于最小范数算法的InSAR相位解缠软件的四种基于最小范数相位解缠算法,包括
第十七讲 矛盾方程(组)的解---最小二乘法 一、从实验数据处理谈起 设有一组实验数据(t 1,s 1),(t 2,s 2),……,(t n ,s n ),希望由实验数据拟合给定规律,从而测出待测量的有关参数。 假定规律为:2t c +1s=c ,由于存在误差i 2 t c (i 1,2,,n)≠+= i 1s c ,令 112122n n t 1s t 1c s A ,x ,b c t 1s ???????? ?????? ===???????????? ???????? , 则:Ax=b 实际无解,或者说 矩阵方程Ax=b 成为矛盾方程(不自洽、非相容),虽说无解,但在物理上看,我们需要而且也理当有“解”。怎么办? 一般处理是,定义一种目标函数,例如: n 2 12i i 1i 2i i 1E(c ,c )w (s c t c )w 0==-->∑为加权系数 使误差12E(c ,c )最小化。w i =1(i=1~n)时2 122E(c ,c )Ax b -= 二、 最小二乘法(解) 对于矛盾方程Ax=b ,最小二乘法是求其“解”的一种方法。即求使2Ax b min -=的解。 引理:m n A C ?∈设,A{1,3}由如下方程的通解构成:
(1,3)(1,3)(1,3)n m AX AA A{1,3}{A (I A A)Z Z C }?=→=+-∈ 其中,A (1,3)为A{1,3}中的某个矩阵。 证:1。方程既然相容,设X 是其某个解,则 (1,3)H (1,3)H (1,3) (i) AXA AA A A X A{1} (iii)(AX)(AA )AA AX X A{3} ==→∈===→∈ 即方程的解必在A{1,3}中。 2。设X 为A 的一个{1,3}-逆矩阵,则 ( )() ()()()iii H H (1,3) (1,3)H (1,3) H H H H (1,3)H H (1,3)(1,3) AX AA AX AA AX A A X A A (AXA)AA AA ====== 即,A 的{1,3}-逆矩阵必满足方程AX=AA (1,3) {} { } (1,3)(1,3) (1,3) n m A{1,3}AX AA A (I A A)Z Z C ?∴==+-∈方程的所有解 = 令(1,3)(1,3)X A I A A)Z =+(-,则 (1,3)(1,3)(1,3) (1,3) (1,3) H (i)AX A AA A AZA AA AZA A X A{1} (iii)AX AA (A AA A)Z A A (AX) X A{3} =+-=∈=+-==∈ 定理:矩阵方程Ax=b 的最小二乘解为 (1,3)x A b =,其中A (1,3)为A 的 任何一个{1,3}-逆矩阵,反之,存在X ,对于任何m b C ∈均有Xb 成为Ax=b 的最小二乘解,则X A{1,3}∈。 证明: R(A)R(A)R(A)R(A)R(A)R (A)Ax b (Ax P b)(P b b) (Ax P b)R(A),(P b b)(I P )b P b R (A) ⊥⊥ -=-+--∈-=--=-∈ 所以,2222 R(A)R(A)R(A)22 2 2Ax b Ax P b P b b b P b -=-+-≥-,
第四章最小二乘法与组合测量 §1概述 最小二乘法是用于数据处理和误差估计中的一个很得力的数学工具。对于从事精密科学实验的人们来说,应用最小乘法来解决一些实际问题,仍是目前必不可少的手段。例如,取重复测量数据的算术平均值作为测量的结果,就是依据了使残差的平方和为最小的原则,又如,在本章将要用最小二乘法来解决一类组合测量的问题。另外,常遇到用实验方法来拟合经验公式,这是后面一章回归分析方法的内容,它也是以最小二乘法原理为基础。 最小二乘法的发展已经经历了200多年的历史,它最先起源于天文和大地测量的需要,其后在许多科学领域里获得了广泛应用,特别是近代矩阵理论与电子计算机相结合,使最小二乘法不断地发展而久盛不衰。 本章只介绍经典的最小二乘法及其在组合测量中的一些简单的应用,一些深入的内容可参阅专门的书籍和文献。 §2最小二乘法原理 最小二乘法的产生是为了解决从一组测量值中寻求最可信赖值的问题。对某量x 测量一组数据n x x x ,,,21 ,假设数据中不存在系统误差和粗大误差,相互独立,服从正态分布,它们的标准偏差依次为:n σσσ ,,21记最可信赖值为x ,相应的残差x x v i i -=。测值落入),(dx x x i i +的概率。 根据概率乘法定理,测量n x x x ,,,21 同时出现的概率为 显然,最可信赖值应使出现的概率P 为最大,即使上式中页指数中的因子达最小,即
权因子:2 2o i i w σσ=即权因子i w ∝21i σ,则 再用微分法,得最可信赖值x 1 1 n i i i n i i w x x w === ∑∑即加权算术平均值 这里为了与概率符号区别,以i ω表示权因子。 特别是等权测量条件下,有: 以上最可信赖值是在残差平方和或加权残差平方和为最小的意义下求得的,称之为最小二乘法原理。它是以最小二乘方而得名。 为从一组测量数据中求得最佳结果,还可使用其它原理。 例如 (1)最小绝对残差和法:Min v i =∑ (2)最小最大残差法:Min v i =max (3)最小广义权差法:Min v v i i =-m in m ax 以上方法随着电子计算机的应用才逐渐引起注意,但最小二乘法便于解析,至今仍用得最广泛。 §3.线性参数最小二乘法 先举一个实际遇到的测量问题,为精密测定三个电容值:321,,x x x 采用的测量方案是,分别等权、独立测得323121,,,x x x x x x ++,列出待解的数学模型。 1x =0.3 2x =-0.4 1x +3x =0.5
图割算法在相位解缠中的应用 摘要:相位解缠一直以来是干涉测量领域中的一个重要研究方向。传统的相位解缠算法的解缠结果易受到噪声或者截断相位的影响。为了解决上述问题,提高解缠精度,在模拟的存在截断相位缺陷的数据上,建立马尔科夫能量模型,推导出能量函数,使得相位解缠变成一个求解全局最优化的问题,利用图割理论求解。实验结果表明,图割理论能够很好的完成能量函数的优化,解缠结果在抗噪性以及精度上,比起传统的解缠算法都有着一定优势。那么就意味着,该方法在相位解缠方面有着重要的研究价值和宽阔的应用前景。 Abstract:Phase unwrapping is an important field in interference measurement. The traditional phase unwrapping algorithms are easily affected by noise or discontinuous phase. In order to solve the problems and improve solution accuracy,establishing markov energy model,getting the energy function,making the phase unwrapping into a global optimization problem on the datas of simulation of discontinuous phase,using the graph cuts solve the problem. The experimental results show that the optimization of energy
基于最小二乘法的数据处理问题研究综述 摘要:对基于最小二乘法的数据处理方法进行了介绍。首先对传统最小二乘法基本原理进行了介绍,然后根据例子来说明怎样运用传统最小二乘法来解决实际辨识问题。而且本文针对传统最小二乘存在的缺陷进一步阐述了一些改进型最小二乘法,综述了最小二乘法的研究现状,最后对最小二乘的发展趋势做了预测。 关键字:最小二乘法数据处理改进型最小二乘法发展趋势 1引言 在科学实验中经常要把离散的测量数据转化为直观的便于研究的曲线方程,即曲线拟合[1]。由于在实验室或实际应用中,误差是不可避免的,所以为了不把原有离散数据中的误差引入,人们经常用拟合来确定模拟函数。拟合方法不要求模拟函数通过已知离散的点,而追求的是所有点到模拟函数达到某种误差指标的最小化,是一种整体上的逼近性质。最小二乘法是解决这类曲线拟合中一种较为常用的方法,根据最小二乘法的定义[2]:“最小二乘法是一种数学优化技术,它通过最小化误差的平方和寻找数据的最佳函数匹配。”最小二乘法是从误差拟合角度对回归模型进行参数估计或系统辨识,因此最小二乘在参数估计、系统辨识以及预测、预报等众多领域中得到极为广泛的应用。 本文在阐述最小二乘法理论的基础上对于其在实际问题中的辨识应用做了简单介绍,并指出实际应用中存在的不足,列举了几种改
进型的最小二乘算法来进行优化比较,最后给出了最小二乘法的发展趋势。 2 最小二乘法的理论基础及应用 2.1最小二乘法的理论基础 最小二乘法作为一种传统的参数估计方法,早已经被大家所了解。 然而大多同学对最小二乘法的认识都比较模糊,仅仅把最小二乘法理解为简单的线性参数估计。 事实上,最小二乘法在参数估计、系统辨识以及预测、预报等众多领域都有着广泛的应用[3]。特别是针对动态系统辨识的方法有很多[4],但其中应用最广泛,辨识效果良好的就是最小二乘辨识方法,研究最小二乘法的应用在就要对其基本原理有较为深刻的理解。 下面是一般的最小二乘法问题:求实系数线性方程组 11112211211222221122 .........00 0 n n n n m m mn n m b b b a x a x a x a x a x a x a x a x a x ++-++-++-?+=? +=?? ??+=? (1) 方程组可能无解。即很可能不存在一组实数x 1,x 2,……,x n 使 2 112120()i i in n i m i a x a x a x b =++?+-=∑ (2) 恒成立。因此我们转而求其次,设法找到实数组 x 1,x 2,…,x n 使误差的平方和最小,这样的 x 1,x 2,…,x n 称为方程组的最小二乘解,这样问题就叫最小二乘法问题[5]。
独立方程个数大于独立的未知参数的个数的方程,称为超定方程,在matlab里面有三种方法求解,一是用伪逆法求解,x=pinv(A)*b,二是用左除法求解,x=A\b,三是用最小二乘法求解,x=lsqnonneg(A,b)(3)矩阵求逆行数和列数相等的矩阵称为方阵,只有方阵有逆矩阵。方阵的求逆函数为:B=inv(A) 该函数返回方阵A的逆阵。如果A不是方阵或接近奇异的,则会给出警告信息。在实际应用中,很少显式的使用矩阵的逆。在MATLAB中不是使用逆阵x=inv(A)*B来求线性方程组Ax=B的解,而是使用矩阵除法运算x=A\B来求解。因为MATLAB设计求逆函数inv时,采用的是高斯消去法,而设计除法解线性方程组时,并不求逆,而是直接采用高斯消去法求解,有效的减小了残差,并提高了求解的速度。因此,MATLAB推荐尽量使用除法运算,少用求逆运算。(4)除法运算在线性代数中,只有矩阵的逆的定义,而没有矩阵除法的运算。而在MA TLAB中,定义了矩阵的除法运算。矩阵除法的运算在MA TLAB中是一个十分有用的运算。根据实际问题的需要,定义了两种除法命令:左除和右除。矩阵左除:C=A\B或C=mldivide(A,B) 矩阵右除;C=A/B或C=mrdivide(A,B) 通常矩阵左除不等于右除,如果A是方阵,A\B等效于A的逆阵左乘矩阵B。也就是inv(A)*B。如果A是一个n*n矩阵,B是一个n维列向量,或是有若干这样的列的矩阵,则A\B就是采用高斯消去法求得的方程AX=B的解。如果A接近奇异的,MA TLAB 将会给出警告信息。如果A是一个m*n矩阵,其中m不等于n,B是一个m维列向量,或是由若干这样的列的矩阵,则X=A\B是不定或超定方程组AX=B的最小二乘解。通过QR分解确定矩阵A的秩k,方程组的解X每一列最多只有k个非零元素。如果k
相关主题
文本预览