作业中演示了3个功能:汽车三自由度模型,单摆运动的动画,六面体的几何变换。
汽车三自由度模型
查找到的一个汽车三自由度模型如下:
将高阶的参数放在左边,经过变形后如下:
φββδφφβδY r MV Y Y MV Y h M r s +-++-=)(.
.. φβφδφβδN r N N I N r I r xz z ++++=..
.
hVr M p L L r I I hV M s p xz x s s -+++-=φφβφ....
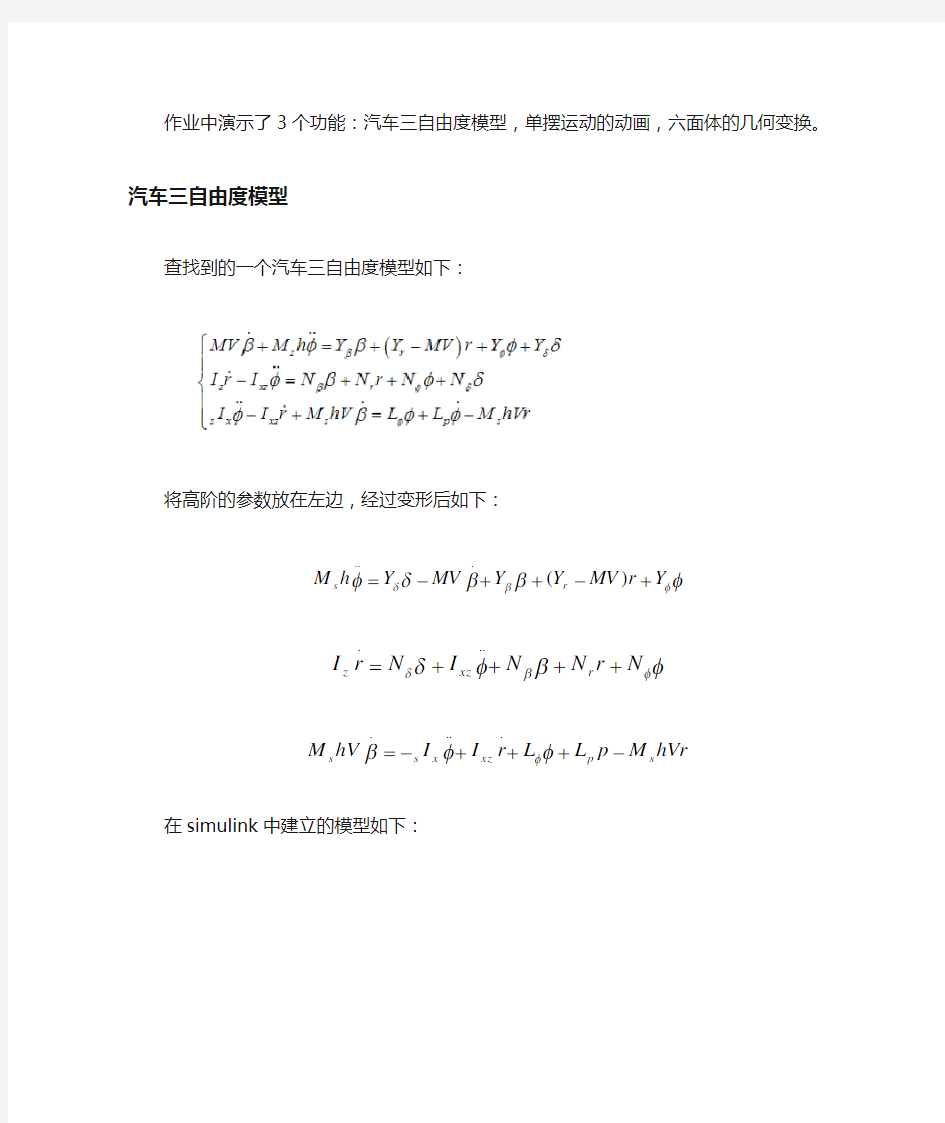
在simulink 中建立的模型如下:
并输入如下参数:I_z=10437;
I_xz=0;
s_I_x=1960;
G_s=2687*9.8; C_f1=100620;
C_f2=32755;
yf=-5300;
h1=0.012;
h2=0.015;
f=0.016;
Y_dt=-k1;
Y_bt=k1+k2;
Y_r=(a*k1-b*k2)/V;
Y_f=yf;
N_dt=-k1*a-k1*h1*f;
N_bt=a*k1-b*k2+(k1*h1+k2*h2)*f;
N_r=(k1*a*a+k2*b*b+(k1*a*h1-k2*b*h2)*f)/V; N_f=a*yf+f*(C_f1+C_f2+h1*yf);
L_f=G_s*h-C_f1-C_f2;
L_p=-6864;
其它的参数由GUI界面控制。
GUI与Simulink的联合
设计好的GUI界面如下:
在“确认”按钮的Callback下输入如下代码:
M=str2double(get(handles.edit_M,'String'));
V=str2double(get(handles.edit_V,'String'));
Ms=str2double(get(handles.edit_Ms,'String'));
k1=str2double(get(handles.edit_k1,'String'));
k2=str2double(get(handles.edit_k2,'String'));
a=str2double(get(handles.edit_a,'String'));
b=str2double(get(handles.edit_b,'String'));
h=str2double(get(handles.edit_h,'String'));
options = simset('SrcWorkspace','current');
sim('wangyf',[],options);
plot(tout,yout);
leg=char('3μéí2à?????ó','??3μoá°ú???ù?èr','?êD?2à????|?');
legend(leg);
grid on;
编辑框中的数字可以自定义,在默认数值的输出结果如下:
动画:单摆运动
在“单摆运动”按钮下输入如下代码:
h=figure('numbertitle','off','name','单摆运动','color','y')
plot([-0.2;0.2],[0;0],'-k','linewidth',20);
g=0.98;
l=1;
theta0=pi/4;
x0=l*sin(theta0);
y0=-l*cos(theta0);
axis([-0.75,0.75,-1.25,0]);
axis off
head=line(x0,y0,'color','r','linestyle','.','erasemode','xor','marker size',40);
body=line([0;x0],[-0.05;y0],'color','b','linestyle','-','erasemode',' xor');
t=0;
dt=0.01;
while 1
t=t+dt;
theta=theta0*cos(sqrt(g/l)*t);
x=l*sin(theta);
y=-l*cos(theta);
if ~ishandle(h),return,end
set(head,'xdata',x,'ydata',y);
set(body,'xdata',[0;x],'ydata',[-0.05;y]);
drawnow;
end
结果如下:
三维图形几何变换
六面体的生成
根据在MATLAB中Help里查找到的方法,在按钮“六面体”下输入如下代码:figure('numbertitle','off','name','áù??ì?μ???o?±???','color','b'); figure(1);
subplot(2,2,1);
v=[0 0 0;1 0 0;1 1 0;0 1 0;0 0 1;1 0 1;1 1 1;0 1 1;];
m=[1 2 6 5;2 3 7 6;3 4 8 7;4 1 5 8;1 2 3 4;5 6 7 8];
patch('Vertices',v,'Faces',m,'FaceVertexCData',hsv(8),'FaceColor','in terp');
view(3);
axis square
hold on;
生成的六面体如下:
图中把窗口分成了2*2的形式,方便平移、缩放、旋转变换后的比较。
几何变换
平移和缩放功能,可以自定义三个坐标方向上的变化量,旋转功能可以自定义一个旋转的弧度。
“平移”按钮下的代码:
figure(1);
subplot(2,2,2);
x=str2double(get(handles.edit_x,'String'));
y=str2double(get(handles.edit_y,'String'));
z=str2double(get(handles.edit_z,'String'));
V=[1 0 0 x;0 1 0 y;0 0 1 z;0 0 0 1;]*[0 1 1 0 0 1 1 0;0 0 1 1 0 0 1 1;0 0 0 0 1 1 1 1;1 1 1 1 1 1 1 1];
V(4,:)=[];
m=[1 2 6 5;2 3 7 6;3 4 8 7;4 1 5 8;1 2 3 4;5 6 7 8];
patch('Vertices',V','Faces',m,'FaceVertexCData',hsv(8),'FaceColor','i nterp');
view(3);
axis square
hold on;
“缩放”按钮下的代码:
figure(1);
subplot(2,2,3);
x1=str2double(get(handles.edit_x1,'String'));
y1=str2double(get(handles.edit_y1,'String'));
z1=str2double(get(handles.edit_z1,'String'));
V=[x1 0 0 0;0 y1 0 0;0 0 z1 0;0 0 0 1;]*[0 1 1 0 0 1 1 0;0 0 1 1 0 0 1 1;0 0 0 0 1 1 1 1;1 1 1 1 1 1 1 1];
V(4,:)=[];
m=[1 2 6 5;2 3 7 6;3 4 8 7;4 1 5 8;1 2 3 4;5 6 7 8];
patch('Vertices',V','Faces',m,'FaceVertexCData',hsv(8),'FaceColor','i nterp');
view(3);
axis square;
hold on;
“旋转”按钮下的代码:
figure(1);
subplot(2,2,4);
rad=str2double(get(handles.edit_rad,'String'));
V=[cos(rad) -sin(rad) 0 0;sin(rad) cos(rad) 0 0;0 0 1 0;0 0 0 1;]*[0 1
1 0 0 1 1 0;0 0 1 1 0 0 1 1;0 0 0 0 1 1 1 1;1 1 1 1 1 1 1 1];
V(4,:)=[];
m=[1 2 6 5;2 3 7 6;3 4 8 7;4 1 5 8;1 2 3 4;5 6 7 8];
patch('Vertices',V','Faces',m,'FaceVertexCData',hsv(8),'FaceColor','i nterp');
view(3);
axis square
hold off;
按照设定的默认数值,逐次点击“六面体”、“平移”、“缩放”、“旋转”四个按钮,得到的结果如下:
汽车研发的五大阶段及制造的四大工艺 汽车研发是一个很复杂的系统工程,甚至需要上千人花费几年的时间才能完成;一款汽车从研发到投入市场一般都需要5年左右的时间。不过随着技术的不断进步,研发的周期也在缩短,当然,我们说的是正向设计,事实上很多国内的厂家都是逆向设计,但即使是逆向设计同样也需要很多的时间。我们可以仿制别人的外观,但是我们无法仿制别人的工艺,我们依然需要进行大量的机构分析、材料分析、力学分析等,依然需要去试制、测试、检测等等,这些研发的过程是无法省略的。 不同的汽车企业其汽车的研发流程略有不同,下面讲述的是正向开发的一般研发流程: 一.市场调研阶段 一个全新车型的开发需要几亿甚至十几亿的大量资金投入,如果不经过很细致的市场调研可能就会“打水漂”了;现在国内有专门的市场调研公司,汽车公司会委托他们对国内消费者的需求、喜好、习惯等做出调研,明确车型形式和市场目标,即价格策略,很多车型的失败都是因为市场调研没有做好。譬如:当年雪铁龙固执的在中国推广两厢车,而忽视了国人对“三厢”的情有独钟,致使两厢车进入中国市场太早,失去了占领市场的机会。 二.概念设计阶段 概念设计主要分三个阶段:总体布置、造型设计、制作油泥模型。 1.总体布置 总布设计是汽车的总体设计方案,包括:车厢及驾驶室的布置,发动机与离合器及变速器的布置、传动轴的布置、车架和承载式车身底板的布置、前后悬架的布置、制动系的布置、油箱、备胎和行李箱等的布置、空调装置的布置。 2.造型设计 在进行了总体布置草图设计以后,就可以在其确定的基本尺寸的上进行造型设计了。包括外形和内饰设计两部分。设计草图是设计师快速捕捉创意灵感的最好方法,最初的设计草图都比较简单,它也许只有几根线条,但是能够勾勒出设计造型的神韵,设计师通过大量的设计草图来尽可能多的提出新的创意。这个车到底是简洁、还是稳重、是复古、还是动感都是在此确定的。 当然,如果是逆向设计,则就不需要这个过程了,把别人的车型直接进行点阵扫描,然后在计算机中进行造型勾画就行了。 3. 制作油泥模型
汽车模型的背景、现状与前景 1927年美国通用汽车公司将油泥应用到汽车设计开发模型上,1955年日本首次使用工业油泥进行汽车模型的设计开发,我国则在70年代初开始应用这一技术。汽车模型工是在80年代初期形成的,目前从业人员大约有1000多人,分布在全国20多个省100多家汽车生产企业。 汽车模型工是设计师与工程师之间的桥梁,没有这个桥梁汽车设计将无法进行。由于汽车车身设计程序要经过汽车效果图、小比例模型制作、1:1模型制作、模型数据采集、修线修面、结构设计等设计过程,因此汽车模型工水平的高低将直接影响到汽车产品开发的进度和质量。一个1:1的汽车油泥模型需要四人同时制作,制作周期为3-4个月,1:1内饰模型需要两人同时制作,制作周期为2-3个月,小比例模型制作周期为2个月。一般规模的汽车生产企业一年能开发2个或更多个新产品。 在欧美国家,汽车模型工可在专门的职业培训机构进行系统培训,在日本也有一些职业培训学校开设了汽车模型工的专业课程。国内目前没有专门的汽车模型工职业培训学校,汽车模型工都是各汽车厂内部自己培养的技术工人。一些有条件的汽车厂,如:解放汽车公司、东风汽车公司只能将该厂的汽车模型工送到国外进行培训,或通过国外代理商组织的专业培训班来提高技术水平。如,日本在中国的汽车模型工代理商每年在上海举办一次汽车模型工培训班,为国内汽车厂家培训了大批的汽车模型工。一方面,企业不可能大批量的培养人才,导致了汽车模型工人才的紧缺,使得国内很多的汽车生产企业无自主产品开发能力;另一方面,国内的汽车模型工与国外的汽车模型工的技术水平相比较还有很大的差距,从而限制了我国汽车工业的发展。
Matlab通信原理仿真 学号: 2142402 姓名:圣斌
实验一Matlab 基本语法与信号系统分析 一、实验目的: 1、掌握MATLAB的基本绘图方法; 2、实现绘制复指数信号的时域波形。 二、实验设备与软件环境: 1、实验设备:计算机 2、软件环境:MATLAB R2009a 三、实验内容: 1、MATLAB为用户提供了结果可视化功能,只要在命令行窗口输入相应的命令,结果就会用图形直接表示出来。 MATLAB程序如下: x = -pi::pi; y1 = sin(x); y2 = cos(x); %准备绘图数据 figure(1); %打开图形窗口 subplot(2,1,1); %确定第一幅图绘图窗口 plot(x,y1); %以x,y1绘图 title('plot(x,y1)'); %为第一幅图取名为’plot(x,y1)’ grid on; %为第一幅图绘制网格线 subplot(2,1,2) %确定第二幅图绘图窗口 plot(x,y2); %以x,y2绘图 xlabel('time'),ylabel('y') %第二幅图横坐标为’time’,纵坐标为’y’运行结果如下图: 2、上例中的图形使用的是默认的颜色和线型,MATLAB中提供了多种颜色和线型,并且可以绘制出脉冲图、误差条形图等多种形式图: MATLAB程序如下: x=-pi:.1:pi; y1=sin (x); y2=cos (x); figure (1); %subplot (2,1,1); plot (x,y1); title ('plot (x,y1)'); grid on %subplot (2,1,2); plot (x,y2);
Dhaval Shroff1, Harsh Nangalia1, Akash Metawala1, Mayur Parulekar1, Viraj Padte1 Research and Innovation Center Dwarkadas J. Sanghvi College of Engineering Mumbai, India. dhaval92shroff@https://www.doczj.com/doc/ef1505024.html,; mvparulekar@https://www.doczj.com/doc/ef1505024.html, Abstract—Dynamic matrix and model predictive control in a car aims at vehicle localization in order to avoid collisions by providing computational control for driver assistance whichprevents car crashes by taking control of the car away from the driver on incidences of driver’s negligence or distraction. This paper provides ways in which the vehicle’s position with reference to the surrounding objects and the vehicle’s dynamic movement parameters are synchronized and stored in dynamic matrices with samples at regular instants and hence predict the behavior of the car’s surrounding to provide the drivers and the passengers with a driving experience that eliminates any reflex braking or steering reactions and tedious driving in traffic conditions or at junctions.It aims at taking corrective action based on the feedback available from the closed loop system which is recursively accessed by the central controller of the car and it controls the propulsion and steeringand provides a greater restoring force to move the vehicle to a safer region.Our work is towards the development of an application for the DSRC framework (Dedicated Short Range Communication for Inter-Vehicular Communication) by US Department of Traffic (DoT) and DARPA (Defense Advanced Research Projects Agency) and European Commission- funded Project SAVE-U (Sensors and System Architecture for Vulnerable road Users Protection) and is a step towards Intelligent Transportation Systems such as Autonomous Unmanned Ground and Aerial Vehicular systems. Keywords-Driver assist, Model predictive control, Multi-vehicle co-operation, Dynamic matrix control, Self-mapping I.INTRODUCTION Driver assist technologies aim at reducing the driver stress and fatigue, enhance his/her vigilance, and perception of the environment around the vehicle. It compensates for the driver’s ability to react [6].In this paper, we present experimental results obtained in the process of developing a consumer car based on the initiative of US DoT for the need for safe vehicular movement to reduce fatalities due to accidents [5]. We aim at developing computational assist for the car using the surrounding map data obtained by the LiDAR (Light Detection and Ranging) sensors which is evaluated and specific commands are issued to the vehicle’s propellers to avoid static and dynamic obstacles. This is also an initiative by the Volvo car company [1] where they plan to drive some of these control systems in their cars and trucks by 2020 and by General Motors, which aims to implement semi-autonomous control in cars for consumers by the end of this decade [18].Developments in wireless and mobile communication technologies are advancing methods for ex- changing driving information between vehicles and roadside infrastructures to improve driving safety and efficiency [3]. We attempt to implement multi-vehicle co-operative communication using the principle of swarm robotics, which will not only prevent collisions but also define specific patterns, which the nearby cars can form and pass through any patch of road without causing traffic jams. The position of the car and the position of the obstacles in its path, static or moving, will be updated in real time for every sampling point and stored in constantly updated matrices using the algorithm of dynamic matrix control. Comparing the sequence of previous outputs available with change in time and the inputs given to the car, we can predict its non-linear behavior with the help of model predictive control. One of the advantages of predictive control is that if the future evolution of the reference is known priori, the system can react before the change has effectively been made, thus avoiding the effects of delay in the process response [16]. We propose an approach in which human driving behavior is modeled as a hybrid automation, in which the mode is unknown and represents primitive driving dynamics such as braking and acceleration. On the basis of this hybrid model, the vehicles equipped with the cooperative active safety system estimate in real-time the current driving mode of non-communicating human-driven vehicles and exploit this information to establish least restrictive safe control actions [13].For each current mode uncertainty, a mode dependent dynamic matrix is constructed, which determines the set of all continuous states that lead to an unsafe configuration for the given mode uncertainty. Then a feedback is obtained for different uncertainties and corrective action is applied accordingly [7].This ITS (Intelligent Transport System) -equipped car engages in a sort of game-theoretic decision, in which it uses information from its onboard sensors as well as roadside and traffic-light sensors to try to predict what the other car will do, reacting accordingly to prevent a crash.When both cars are ITS-equipped, the “game” becomes a cooperative one, with both cars communicating their positions and working together to avoid a collision [19]. The focus is to improve the reaction time and the speed of communication along with more accurate vehicle localization. In this paper, we concentrate on improving vehicle localization using model predictive control and dynamic matrix control algorithm by sampling inputs of the car such as velocity, steering frame angle, self-created maps Dynamic Matrix and Model Predictive Control for a Semi-Auto Pilot Car
基于Matlab/Simulink的汽车建模与仿真 摘要 本文所研究的是基于Matlab/Simulink的汽车防抱死刹车系统(ABS)的仿真方法,本方法是利用了Simulink所提供的模块建立了整车的动力学模型,轮胎模型,制动系统的模型和滑移率的计算模型,采用的控制方法是PID控制器,对建立的ABS的数学模型进行了仿真研究,得到了仿真的曲线,将仿真曲线与与没有安装ABS系统的制动效果进行对比。根据建立的数学模型分析,得到ABS系统可靠,能达到预期的效果。 关键词 ABS 仿真建模防抱死系统PID
Modeling and Simulation of ABS System of Automobiles Based on Matlab/Simulink Abstract A method for building a Simulator of ABS base on Matlab/Simulink is presented in this paper.The single wheel vehicle model was adopted as a research object in the paper. Mathematical models for an entire car, a bilinear tire model, a hydraulic brake model and a slip ratio calculation model were established in the Matlab/Simulink environment. The PID controller was designed. The established ABS mathematical model was simulated and researched and the simulation curves were obtained. The simulation results were compared with the results without ABS. The results show that established models were reliable and could achieve desirable brake control effects. Key words ABS; control; modeling; simulation;Anti-lock Braking System; PID
实验一 MATLAB 及仿真实验(控制系统的时域分析) 一、实验目的 学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点 1、 系统的典型响应有哪些? 2、 如何判断系统稳定性? 3、 系统的动态性能指标有哪些? 三、实验方法 (一) 四种典型响应 1、 阶跃响应: 阶跃响应常用格式: 1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。 2、),(Tn sys step ;表示时间范围0---Tn 。 3、),(T sys step ;表示时间范围向量T 指定。 4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。 2、 脉冲响应: 脉冲函数在数学上的精确定义:0 ,0)(1)(0 ?==?∞ t x f dx x f 其拉氏变换为:) ()()()(1)(s G s f s G s Y s f === 所以脉冲响应即为传函的反拉氏变换。 脉冲响应函数常用格式: ① )(sys impulse ; ② ); ,();,(T sys impulse Tn sys impulse ③ ),(T sys impulse Y = (二) 分析系统稳定性 有以下三种方法: 1、 利用pzmap 绘制连续系统的零极点图; 2、 利用tf2zp 求出系统零极点; 3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析 Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.
云南大学信息学院学生实验报告 课程名称:现代控制理论 实验题目:预测控制 小组成员:李博(12018000748) 金蒋彪(12018000747) 专业:2018级检测技术与自动化专业
1、实验目的 (3) 2、实验原理 (3) 2.1、预测控制特点 (3) 2.2、预测控制模型 (4) 2.3、在线滚动优化 (5) 2.4、反馈校正 (5) 2.5、预测控制分类 (6) 2.6、动态矩阵控制 (7) 3、MATLAB仿真实现 (9) 3.1、对比预测控制与PID控制效果 (9) 3.2、P的变化对控制效果的影响 (12) 3.3、M的变化对控制效果的影响 (13) 3.4、模型失配与未失配时的控制效果对比 (14) 4、总结 (15) 5、附录 (16) 5.1、预测控制与PID控制对比仿真代码 (16) 5.1.1、预测控制代码 (16) 5.1.2、PID控制代码 (17) 5.2、不同P值对比控制效果代码 (19) 5.3、不同M值对比控制效果代码 (20) 5.4、模型失配与未失配对比代码 (20)
1、实验目的 (1)、通过对预测控制原理的学习,掌握预测控制的知识点。 (2)、通过对动态矩阵控制(DMC)的MATLAB仿真,发现其对直接处理具有纯滞后、大惯性的对象,有良好的跟踪性和较强的鲁棒性,输入已 知的控制模型,通过对参数的选择,来获得较好的控制效果。 (3)、了解matlab编程。 2、实验原理 模型预测控制(Model Predictive Control,MPC)是20世纪70年代提出的一种计算机控制算法,最早应用于工业过程控制领域。预测控制的优点是对数学模型要求不高,能直接处理具有纯滞后的过程,具有良好的跟踪性能和较强的抗干扰能力,对模型误差具有较强的鲁棒性。因此,预测控制目前已在多个行业得以应用,如炼油、石化、造纸、冶金、汽车制造、航空和食品加工等,尤其是在复杂工业过程中得到了广泛的应用。在分类上,模型预测控制(MPC)属于先进过程控制,其基本出发点与传统PID控制不同。传统PID控制,是根据过程当前的和过去的输出测量值与设定值之间的偏差来确定当前的控制输入,以达到所要求的性能指标。而预测控制不但利用当前时刻的和过去时刻的偏差值,而且还利用预测模型来预估过程未来的偏差值,以滚动优化确定当前的最优输入策略。因此,从基本思想看,预测控制优于PID控制。 2.1、预测控制特点 首先,对于复杂的工业对象。由于辨识其最小化模型要花费很大的代价,往往给基于传递函数或状态方程的控制算法带来困难,多变量高维度复杂系统难以建立精确的数学模型工业过程的结构、参数以及环境具有不确定性、时变性、非线性、强耦合,最优控制难以实现。而预测控制所需要的模型只强调其预测功能,不苛求其结构形式,从而为系统建模带来了方便。在许多场合下,只需测定对象的阶跃或脉冲响应,便可直接得到预测模型,而不必进一步导出其传递函数或状
MATLAB/Simulink 电力系统建模与仿真 实验报告 姓名:****** 专业:电气工程及其自动化 班级:******************* 学号:*******************
实验一无穷大功率电源供电系统三相短路仿真 1.1 无穷大功率电源供电系统仿真模型构建 运行MATLAB软件,点击Simulink模型构建,根据电路原理图,添加下列模块: (1)无穷大功率电源模块(Three-phase source) (2)三相并联RLC负荷模块(Three-Phase Parallel RLC Load) (3)三相串联RLC支路模块(Three-Phase Series RLC Branch) (4)三相双绕组变压器模块(Three-Phase Transformer (Two Windings)) (5)三相电压电流测量模块(Three-Phase V-I Measurement) (6)三相故障设置模块(Three-Phase Fault) (7)示波器模块(Scope) (8)电力系统图形用户界面(Powergui) 按电路原理图连接线路得到仿真图如下: 1.2 无穷大功率电源供电系统仿真参数设置 1.2.1 电源模块 设置三相电压110kV,相角0°,频率50Hz,接线方式为中性点接地的Y形接法,电源电阻0.00529Ω,电源电感0.000140H,参数设置如下图:
1.2.2 变压器模块 变压器模块参数采用标幺值设置,功率20MVA,频率50Hz,一次测采用Y型连接,一次测电压110kV,二次侧采用Y型连接,二次侧电压11kV,经过标幺值折算后的绕组电阻为0.0033,绕组漏感为0.052,励磁电阻为909.09,励磁电感为106.3,参数设置如下图: 1.2.3 输电线路模块 根据给定参数计算输电线路参数为:电阻8.5Ω,电感0.064L,参数设置如下图: 1.2.4 三相电压电流测量模块 此模块将在变压器低压侧测量得到的电压、电流信号转变成Simulink信号,相当于电压、电流互感器的作用,勾选“使用标签(Use a label)”以便于示波器观察波形,设置电压标签“Vabc”,电流标签“Iabc”,参数设置如下图:
电机与拖动控制实验及其MATLAB仿真: 《电机与拖动控制实验及其MATLAB仿真》是2014年11月18日清华大学出版社出版的图书,作者是曹永娟。 内容简介: 本书分上、下两篇。上篇为电机与拖动控制实验教程,针对MCL 系列电机实验教学系统进行介绍,包括变压器、同步电机、异步电机、直流电机以及直流调速系统、交流调速系统拖动控制实验内容。 目录: 上篇电机与拖动控制实验 第1章电机实验装置和基本要求 1.1MCLⅡ型电机教学实验台 1.2实验装置和挂件箱的使用 1.2.1MCLⅡ型电机实验装置交流及直流电源操作说明 1.2.2仪表的使用 1.2.3挂件箱的使用 1.2.4交直流电机的使用 1.2.5导轨、测速发电机及转速计的使用 第2章电机与拖动控制实验基本要求和安全操作规程 2.1实验基本要求 2.2实验前的准备 2.3实验的进行 2.4实验报告
2.5实验安全操作规程 第3章变压器实验 3.1单相变压器 3.1.1实验目的 3.1.2预习要点 3.1.3实验项目 3.1.4实验设备及仪器 3.1.5实验方法 3.1.6实验报告 3.2三相变压器 3.2.1实验目的 3.2.2预习要点 3.2.3实验项目 3.2.4实验设备及仪器 3.2.5实验方法 3.2.6实验报告 3.3三相变压器的连接组和不对称短路3.3.1实验目的 3.3.2预习要点 3.3.3实验项目 3.3.4实验设备及仪器 3.3.5实验方法
3.3.6实验报告 3.3.7附录 3.4三相变压器的并联运行3. 4.1实验目的 3.4.2预习要点 3.4.3实验项目 3.4.4实验设备及仪器 3.4.5实验方法 3.4.6实验报告 第4章同步电机实验 4.1三相同步发电机的运行特性4.1.1实验目的 4.1.2预习要点 4.1.3实验项目 4.1.4实验设备及仪器 4.1.5实验方法 4.1.6实验报告 4.1.7思考题 4.2三相同步发电机的并联运行4.2.1实验目的 4.2.2预习要点 4.2.3实验项目
汽车模型制作过程报告 一、泥模的制作 1、泥模内的支撑物 初期选择了砖头,优点是稳固坚硬,缺点是不方便上泥,砖头吸水导致泥模很快干裂。最终选择泡沫。做成车的大概形状。 2、先确定比例为1:8,根据实际尺寸按比例计算出模型的尺寸,规定中线。 3、上泥 首先用手掌大块的上泥做出车的大体形状。在制作期间对整体形状的把握不够,导致模型不对称,形状与实际不符,进行了大范围的修改。在多次调整之后整体形状基本符合。最后结合各种工具和实际车型(奥迪Q7)的图片进行细节的刻画。锻炼了我们的细节观察能力和动手能力。 二、石膏模型的制作 1、制作石膏泥子。 先盛一盆水,一人捧石膏粉,另一人不断搅拌,直到调和均匀并且粘度合适。这个过程我们不断尝试并总结经验,最终调出了合适的石膏泥子,掌握了适当的比例和调制方法。 2、从泥模制作石膏模。 我们选择将模型分三部分制作,首先将泥模上涂满洗发水作为泥和石膏之间的分离剂。然后将泥模固定在墙边,使用挡板,泥,将泥模周围空间分成三部分,将调制好的石膏泥子小心灌入。等待石膏变干晾晒若干周。 3、拆分石膏模 将石膏内的泥全部取出,用刷子刷干净石膏上残留的泥和石膏粉,并用绳子固定三部分石膏模型成为一个整体。 三、玻璃钢的制作 1、石膏内部涂洗发水作为分离玻璃钢和石膏的分模剂,要刷均匀。 2、树脂和催化剂固化剂调制,比例为1:20。 3、在石膏模型内部涂抹调制好的树脂,涂抹均匀后铺满玻璃丝布,反复三次。 4、晾晒若干天。 四、玻璃钢的拆分和打磨 1、拆分。 使用锤子等工具将玻璃钢外部的石膏模型砸碎,取出玻璃钢模型。 2、切割和打磨。 首先使用工具将玻璃钢模型周围的多余部分切除,并尝试用白醋洗去玻璃钢表面的石膏,有一定效果。然后使用打磨工具打磨。最后用粗砂纸和细砂纸进行细致的打磨。期间锻炼了我们使用工具的动手能力,掌握了一些切割工具的使用。 五、喷漆
MATLA仿真实验报告 学院:计算机与信息学院 课程:—随机信号分析 姓名: 学号: 班级: 指导老师: 实验一
题目:编写一个产生均值为1,方差为4的高斯随机分布函数程序, 求最大值,最小值,均值和方差,并于理论值比较。 解:具体的文件如下,相应的绘图结果如下图所示 G仁random( 'Normal' ,0,4,1,1024); y=max(G1) x=mi n(G1) m=mea n(G1) d=var(G1) plot(G1);
实验二 题目:编写一个产生协方差函数为CC)=4e":的平稳高斯过程的程序,产生样本函数。估计所产生样本的时间自相关函数和功率谱密度,并求统计自相关函数和功率谱密度,最后将结果与理论值比较。 解:具体的文件如下,相应的绘图结果如下图所示。 N=10000; Ts=0.001; sigma=2; beta=2; a=exp(-beta*Ts); b=sigma*sqrt(1-a*a); w=normrnd(0,1,[1,N]); x=zeros(1,N); x(1)=sigma*w(1); for i=2:N x(i)=a*x(i-1)+b*w(i); end %polt(x); Rxx=xcorr(x0)/N; m=[-N+1:N-1]; Rxx0=(sigma A2)*exp(-beta*abs(m*Ts)); y=filter(b,a,x) plot(m*Ts,RxxO, 'b.' ,m*Ts,Rxx, 'r');
periodogram(y,[],N,1/Ts); 文件旧硯化)插入(1〕 ZMCD 克闻〔D ]窗口曲) Frequency (Hz) 50 100 150 200 250 300 350 400 450 500 NH---.HP)&UO 二 balj/ 」- □歹
实验五SIMULINK仿真实验 一、实验目的 考察连续时间系统的采样控制中,零阶保持器的作用与采样时间间隔对Ts 对系统稳定性的影响 二、实验步骤 开机执行程序,用鼠标双击图标,进入MA TLAB命令窗口:Command Windows在Command Windows窗口中输入:simulink,进入仿真界面,并新建Model文件在Model界面中构造连续时间系统的结构图。作时域仿真并确定系统时域性能指标。 图(6-1) 带零阶保持器的采样控制系统如下图所示。作时域仿真,调整采样间隔时间Ts,观察对系统稳定性的影响。 图(6-2) 参考输入量(给定值)作用时,系统连接如图(6-1)所示: 图(6-3) 三、实验要求 (1)按照结构图程序设计好模型图,完成时域仿真的结构图 (2)认真做好时域仿真记录 (3)参考实验图,建立所示如图(6-1)、图(6-2)、图(6-3)的实验原理图; (4)将鼠标移到原理图中的PID模块进行双击,出现参数设定对话框,将PID 控制器的积分增益和微分增益改为0,使其具有比例调节功能,对系统进行纯比例控制。
1. 单击工具栏中的图标,开始仿真,观测系统的响应曲线,分析系统性 能;调整比例增益,观察响应曲线的变化,分析系统性能的变化。 2. 重复步骤2-3,将控制器的功能改为比例微分控制,观测系统的响应曲线, 分析比例微分控制的作用。 3. 重复步骤2-3,将控制器的功能改为比例积分控制,观测系统的响应曲线, 分析比例积分控制的作用。 4. 重复步骤2-3,将控制器的功能改为比例积分微分控制,观测系统的响应曲 线,分析比例积分微分控制的作用。 5. 参照实验一的步骤,绘出如图(6-2)所示的方块图; 6. 将PID控制器的积分增益和微分增益改为0,对系统进行纯比例控制。不断 修改比例增益,使系统输出的过渡过程曲线的衰减比n=4,记下此时的比例增益值。 7. 修改比例增益,使系统输出的过渡过程曲线的衰减比n=2,记下此时的比例 增益值。 8. 修改比例增益,使系统输出呈临界振荡波形,记下此时的比例增益值。 9. 将PID控制器的比例、积分增益进行修改,对系统进行比例积分控制。不断 修改比例、积分增益,使系统输出的过渡过程曲线的衰减比n=2,4,10,记下此时比例和积分增益。 10、将PID控制器的比例, 积分, 微分增益进行修改,对系统进行比例、积分、 微分控制。不断修改比例、积分、微分增益,使系统输出的过渡过程曲线的衰减比n=2、4、10记下此时的比例、积分、微分增益值。 四、实验报告要求 (1)叙述零阶保持器的作用 (2)讨论采样时间间隔Ts对系统的影响。 (3)写出完整实验报告 附:step模块在sources库中 sum模块在math operations库中 scope模块在sinks库中 transfer fcn模块在continuous库中 zero-order hold模块在discrete库中
车辆悬架模型的仿真与分析 目前,关于汽车模型的研究很多。詹长书等人研究了二自由度懸架模型的频域响应特性。李俊等人模拟了不同车速和路况下二自由度车辆模型的动力学。郑兆明研究了二自由度车轮动载荷的均方值。基于Matlab建立了更加复杂的悬架模型,分析了其在模拟路面作用下的响应,分析了系统阻尼参数和刚度参数变化对车身动态响应的影响。 标签:汽车悬架;模型;模拟 据公安部交通管理局统计,截至2019年3月底,全国机动车保有量达3.3亿辆,其中汽车达2.46亿辆,驾驶人达4.1亿,机动车、驾驶人总量及增量均居世界第一。随着汽车数量的迅速增加,人们开始越来越重视汽车的乘坐舒适性,平顺性是舒适性的重要组成部分。振动是影响平顺性的主要因素,因此车身系统参数的合理设计对提高汽车的舒适性和安全性具有重要意义。 1车辆悬架模型 传统的悬架系统一般由弹性元件和参数固定的阻尼元件组成。本文选择汽车后轮的任意悬架系统建立四分之一模型。该模型的简图如下图1所示。其中,1是螺旋弹簧,2是纵向推力杆,3是减震器,4是横向稳定器,5是定向推力杆。 2悬架刚度分析 2.1悬架垂直刚度分析 悬架系统的垂直刚度可以通过分析悬架两个车轮在同一方向上的运行情况来获得。因为装有发动机的车辆的前轴载荷变化很大,所以前悬架通过调节螺旋弹簧的刚度和自由长度来确保车身姿态。后悬架的轴重变化不大,只有螺旋弹簧的自由长度略有调整,后悬架螺旋弹簧的刚度没有调整。这导致带有发动机的B 车型前悬架刚度略有增加。 除了悬架结构和参数的匹配外,前后悬架固有频率的正确匹配是降低车辆振动耦合度、有效提高车辆乘坐舒适性的重要方法之一。由于B型前悬架的轴重变化很大,通过调整前悬架螺旋弹簧的刚度,前悬架和后悬架的偏置频率比几乎不变。 2.2悬架倾角的刚度分析 一般来说,乘用车的前后侧倾刚度比要求在1.4和2.6之间,以满足略微不足的转向特性的要求。B车型前悬架的侧倾刚度略高于C车型,这是由前悬架刚度的增加引起的。前悬架侧倾刚度的增加有助于减小侧倾角度,但变化很小。
2012届本科毕业论文(设计)论文题目:汽车模型的设计及数控加工 学生姓名: 所在院系:机电学院 所学专业:机械设计制造及其自动化 导师姓名: 完成时间:2012年5月18日
摘要 数控机床是典型的机电相融合的机电一体化产品,CAD/CAM是计算机科学同机械工程交叉的结果。本课题主要是对汽车模型进行设计并用数控机床加工,在设计和加工过程中,用Solid Works进行造型设计, CAXA制造工程师来生成加工轨迹路线和加工代码,然后采用数控机床进行各个零件的加工,最终完成模型组装。 关键词:数控机床,造型设计,Solid Works ,CAXA制造工程师,数控加工 Abstract CNC machine tool is typical of combining electromechanical integration of the mechanical and electronic products,CAD/CAM is computer science with mechanical engineering cross results. This topic is mainly to the car model design and CNC machine tool processing, in the design and processing process, with Solid Works on model design, CAXA manufacturing engineers to generate processing track route and processing code, then the CNC machine tools for various pats processing ,finally complete assembly model. Keywords:CNC Machine Tool , Model Design ,Solid Works ,CAXA Manufacturing Engineers ,CNC Machining
实验一:AM 信号的调制与解调 实验目的:1.了解模拟通信系统的仿真原理。 2.AM 信号是如何进行调制与解调的。 实验原理: 1.调制原理:AM 调制是用调制信号去控制高频正弦载波的幅度,使其按调制信号的规律变化的过程,就是按原始电信号的变化规律去改变载波某些参量的过程。 + m(t) S AM (t)A 0 cos ωc t AM 信号的时域和频域的表达式分别为: ()()[]()()()()t t m t A t t m A t S C C C AM ωωωcos cos cos 00+=+= 式(4-1) ()()()[]()()[]C C C C AM M M A S ωωωωωωδωωδπω-+++ -++=2 1 0 式(4-2) 在式中,为外加的直流分量;可以是确知信号也可以是 随机信号,但通常认为其平均值为0,即。其频谱是DSB SC-AM 信号的频谱加上离散大载波的频谱。 2.解调原理:AM 信号的解调是把接收到的已调信号还 原为调制信号。 AM 信号的解调方法有两种:相干解调和包 络检波解调。 AM 相干解调原理框图如图。相干解调(同步解调):利用
相干载波(频率和相位都与原载波相同的恢复载波)进行的解调,相干解调的关键在于必须产生一个与调制器同频同相位的载波。如果同频同相位的条件得不到满足,则会破坏原始信号的恢复。相干载波的提取:(1)导频法:在发送端加上一离散的载频分量,即导频,在接收端用窄带滤波器提取出来作为相干载波,导频的功率要求比调制信号的功率小;(2)不需导频的方法:平方环法、COSTAS环法。 LPF m0(t) S AM(t) cosωc t AM信号波形的包络与输入基带信号成正比,故可以用包络检波的方法恢复原始调制信号。包络检波器一般由半波或全波整流器和低通滤波器组成: (1)整流:只保留信号中幅度大于0的部分。(2)低通滤波器:过滤出基带信号;(3)隔直流电容:过滤掉直流分量。实验内容: 1.AM相干解调框图。