
收稿日期:2007203226
作者简介:刘志敏(19772),女,助理工程师,毕业于华东交通大学,现在西南交通大学攻读硕士学位,主要研究方向为电力电子与电力传动。
文章编号:100923664(2007)0520007204研制开发
一种单相三电平高功率因数PWM 整流器的研究与仿真
刘志敏,宋文胜,冯晓云,赵小皓
(西南交通大学电气工程学院,四川成都,610031)
摘要:介绍了一种新型单相三电平高功率因数PWM 整流器电路拓扑,详细分析了该电路的工作状态,推导了其数学模型。采用预测电流控制和逻辑开关状态控制作为其控制策略,经计算机仿真结果表明,该整流器能够维持直流侧输出电压稳定,并可实现高功率因数运行。
关键词:整流器;三电平;高功率因数;预测电流控制中图分类号:TN 712
文献标识码:A
Study and Simulation on a Novel Single 2Phase Three 2Level
PWM Rectifier wit h a High Power Factor
L IU Zhi 2min ,SON G Wen 2sheng ,FEN G Xiao 2yun ,ZHAO Xiao 2hao
(College of Electrical Engineering ,Southwest Jiaotong University ,Chengdu 610031,China )
Abstract :A novel single 2phase three 2level PWM rectifier with high power factor is introduced ,the working state is analyzed in detail ,and the mathematic model of the rectifier is derived.The predictive current control technique and logic switch state control for the rectifier is adopted.The simulation results show that the rectifier can work with high power factor ,and the voltage of DC output is steadilized.
Key words :rectifier ;three 2level ;high power factor ;predictive current control
0 引 言
随着电力电子装置的广泛应用,电网谐波及无功“污染”现象日益严重,给工业生产和社会生活带来危害与不便。消除谐波并提高功率因数,已经成为电力电子学界和全社会关注的热门问题[122]。同时,电力电子专家们也为此开展了大量的研究工作,主要思想是将PWM 技术引入变流装置,使交流侧电流正弦化,并与电压同相位,实现单位功率因数。目前,高功率因数整流器的研究[125]已经比较成熟,应用相对广泛,但其只限于中小功率范围,而且在功率密度、开关损耗、传输效率、系统成本、电磁污染和谐波畸变等方面仍不能满足人们对其越来越高的性能要求。
因此,寻求新型的拓扑主电路结构,并将先进的控制策略引入到PWM 整流器中,是改善整流器质量、提高系统性能和实现单位功率因数的主要措施之一,是单相高功率因数整流器的一个重要发展方向。本文引入了一种新型单相三电平PWM 整流器电路拓扑结构,采用预测电流控制[6]作为其控制策略,逻辑开关控制作为其PWM 调制模式,并进行了计算机仿真。
1 新型PWM 整流器拓扑结构与工作原理
1.1 拓扑结构
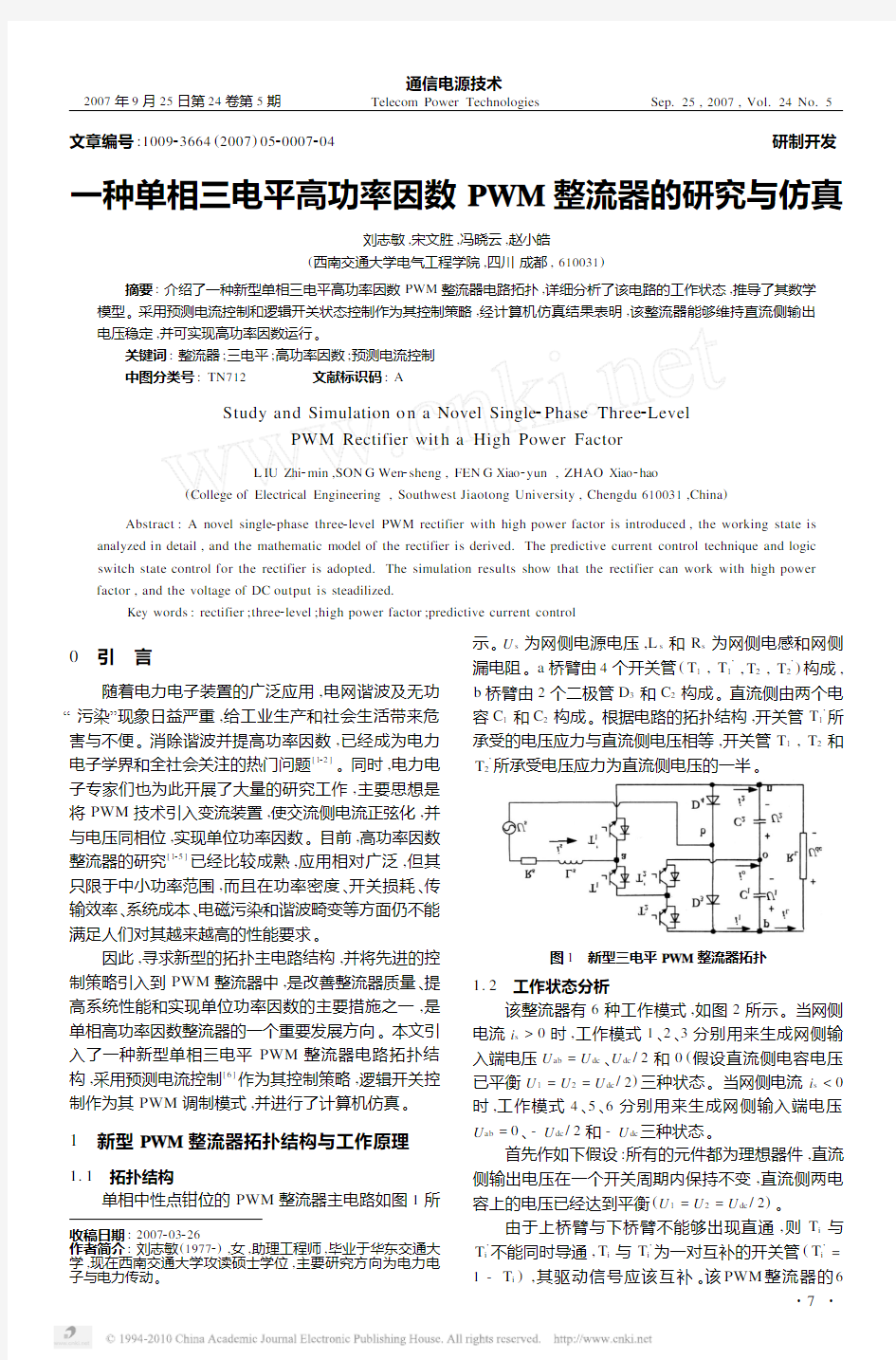
单相中性点钳位的PWM 整流器主电路如图1所
示。U s 为网侧电源电压,L s 和R s 为网侧电感和网侧漏电阻。a 桥臂由4个开关管(T 1,T 1’,T 2,T 2’)构成,b 桥臂由2个二极管D 3和C 2构成。直流侧由两个电
容C 1和C 2构成。根据电路的拓扑结构,开关管T 1’所承受的电压应力与直流侧电压相等,开关管T 1,T 2和T 2’所承受电压应力为直流侧电压的一半
。
图1 新型三电平PWM 整流器拓扑
1.2 工作状态分析
该整流器有6种工作模式,如图2所示。当网侧
电流i s >0时,工作模式1、2、3分别用来生成网侧输入端电压U ab =U dc 、U dc /2和0(假设直流侧电容电压已平衡U 1=U 2=U dc /2)三种状态。当网侧电流i s <0时,工作模式4、5、6分别用来生成网侧输入端电压U ab =0、-U dc /2和-U dc 三种状态。
首先作如下假设:所有的元件都为理想器件,直流侧输出电压在一个开关周期内保持不变,直流侧两电容上的电压已经达到平衡(U 1=U 2=U dc /2)。
由于上桥臂与下桥臂不能够出现直通,则T i 与T i ’不能同时导通,T i 与T i ’为一对互补的开关管(T i ’=1-T i ),其驱动信号应该互补。该PWM 整流器的6
?
7?
图2 新型PWM 整流器的6种工作模式
种工作模式对应的开关状态如表1所示。其中“X ”表示开关信号既可以为“1”,又可以为“0”。
表1 新型PWM 整流器对应的6种开关状态
Mode
i s T 1T 2
U ao U bo U ab i 1i o i 2U 1U 2
1+11U 1-U 2U 1+U 2
i s 0-i s ↑↑2+100-U 2U 20i s -i s ↓↑3+0X -U 2-U 20000↓↓4-11U 1U 10000↓↓5-100U 1-U 1-i s i s 0↑↓6
-
0X
-U 2
U 1
-U 1-U 2
i s
-i s
↑
↑
工作状态1(i s >0,且T 1T 2=11):该状态的等效电路如图2(a )所示。开关管T 1和T 2导通,T 1’和T 2’关断,网侧端电压U ao =U 1,U bo =-U 2和U ab =U 1+
U 2。正向网侧电流i s 减小,并且对电容C 1和C 2进行
充电。
工作状态2(i s >0,且T 1T 2=10):该状态的等效电路如图2(b )所示。开关管T 1和T 2’导通,T 1’和T 2关断,网侧端电压U ao =0,U bo =-U 2和U ab =U 2。如果网侧电源电压U s 大于(或小于)直流侧电压U dc 的一半,则网侧电流i s 增大(或减小);正向网侧电流i s 对电容C 2进行充电,电容C 1通过负载电流放电。
工作状态3(i s >0,且T 1T 2=0X ):该状态的等效电路如图2(c )所示。开关管T 1关断,T 1’导通,T 2既可为关断也可为导通,T 2’的驱动信号总是与T 2互补。网侧端电压U ao =-U 2,U bo =-U 2和U ab =0。正向网侧电流i s 增大,电容C 1和C 2通过负载电流放电。工作状态4(i s <0,且T 1T 2=11):该状态的等效
电路如图2(d )所示。开关管T 1和T 2导通,T 1’和T 2’关断,网侧端电压U ao =U 1,U bo =U 1和U ab =0。负向网侧电流i s 减小,电容C 1和C 2通过负载电流放电。
工作状态5(i s <0,且T 1T 2=10):该状态的等效电路如图2(e )所示。开关管T 1和T 2’导通,T 1’和T 2关断,网侧端电压U ao =0,U bo =U 1和U ab =-u 1。如果网侧电源电压的模|U s |大于(或小于)直流侧电压
U dc 的一半,则负向网侧电流i s 减小(或增大),负向网
侧电流i s 对电容C 1进行充电。
工作状态6(i s <0,且T 1T 2=0X ):该状态的等效电路如图2(f )所示。开关管T 1关断,T 1’导通,T 2既可为关断也可为导通,T 2’的驱动信号总是与T 2互补。网侧端电压U ao =-U 2,U b 0=U 1和U ab =-U 1-U 2。负向网侧电流i s 增大,并且对电容C 1和C 2进行充电。
2 PWM 整流器的数学模型
定义2个开关函数如式(1)和(2)所示:
S a =1
T 1T 2=110T 1T 2=10-1T 1T 2=0X
(1)
S b =1i s <0(D 3导通)-1
i s >0(D 4导通)
(2)
根据表1中所示的开关状态,由基尔霍夫定律(KVL and KCL ),对网侧输入端的电压和电流进行
?
8?
通信电源技术 2007年9月25日第24卷第5期刘志敏等: 一种单相三电平高功率
因数PWM整流器的研究与仿真
Telecom Power Technologies
Sep.25,2007,Vol.24No.5
分析,网侧输入端电压和直流侧的电流可以表示为:
U ao=S a(S a+1)
2
U1-
S a(S a-1)
2
U2(3)
U bo=S b(S b+1)
2
U1-
S b(S b-1)
2
U2(4)
U ab=S a(S a+1)
2
-
S b(S b+1)
2
U1
-S a (S a-1)
2
-
S b(S b-1)
2
U2(5)
假设开关管为理想模型,在换相过程中没有功率损失和能量储存,交流侧与直流侧瞬时功率应当相等。有:
U ab i s=U1i1-U2i2(6)将式(6)代入式(5)中,则有:
i1=S a(S a+1)-S b(S b+1)
2
i s(7)
i2=S a(S a-1)-S b(S b-1)
2
i s(8)
i o=-i1-i2=(S2b-S2a)i s(9) 根据式(5)、式(7)和式(8),则这种新型PWM整流器的主电路数学模型如式(10)所示。
d i s
d t
=
U s-R s i s
L s
-
S a(S a+1)-S b(S b+1)
2L s
U1
+S a
(S a-1)-S b(S b-1)
2L s
U2
d u1
d t
=
S a(S a+1)-S b(S b+1)
2C1
i s-
U1+U2
R L C1
d u2
d t
=
S b(S b-1)-S a(S a-1)
2C2
i s-
U1+U2
R L C2
(10)
3 控制策略与PWM调制方法
该PWM整流器的控制原理框图如图3所示,采用电压外环电流内环的双闭环控制策略。电压外环采用PI控制器,
通过将直流侧电压U dc与其给定值U3dc 的误差信号进行PI
调节得到网侧电流的给定值i3s的幅值,其相位和频率通过锁相环(PLL)从网侧电源电压U s上获取。电流内环采用预测电流控制。由于该整流器存在两电容电压不平衡问题,在控制系统中,加入了电容电压补偿环节,两个电容间电压的变化通过K引至电流控制环,以平衡中间电压。
对于Boo st型三电平结构的整流器,可以将其工作模式划分为2个工作区域,如图4所示。表2给出了相应区域所对应的电平。网侧输入端给定电压U3ab 应为一个正弦信号,在一个开关周期T s内,如果T s 较小,可以认为U3ab为一个恒定值。采用面积等效原理,考虑两电容上的电压平衡时(U1=U1=U dc/2),用两个幅值相差U dc/2的两个状态量V k和V k+1来等效,如图5所示。例如在区域1中,当U s>0时,采用V k+1=U dc/2和V k=0的PWM信号来等效U3ab。对
图3 PWM整流器控制框图
图4 工作模式的区域划分
于这两种电平分别采用工作模式2和3来等效。其他区域也可以根据表2进行分析。
由表2和图5可知,有如下关系式成立。
|V k+1-V k|=
U dc
2
(11)
∫t k+T s
t k
U3ab d t=U3ab T s(12)
∫t k+T s
t k
U ab d t=V k T1+V k+1T2(13)
T1+T2=T s(14)
表2 相应电平的工作区域
工作区域
区域1区域2
U s>0U s<0U s>0U s<0
高电平U dc
2
0U dc-
U dc
2
低电平0-U dc
2
U dc
2
-U dc Mode高电平2415 Mode低电平3526
图5 PWM调制方式
?
9
?
式中T1为低电平状态量V k作用的时间;T2为高电平状态量V k+1作用的时间。则在一个开关周期(t k,t k+ T s)内,由面积等效原理可得式(15)。采用预测电流控制,假设网侧电流i s(t k)经过一个开关周期后,能够达到给定的电流值,如式(16)所示。
U3ab T s=V k T1+V k+1T2(15)
i s(t k+T s)=i3s(t k)(16)
由式(10)和式(16)可以得到,在一个开关周期T s 内,有式(17)成立。
U3ab=U s-R s i s-L s(i3s-i s)
T s
(17)
联立式(14)、(15)、(17),可以求出状态量V k作用的时间T1和V k+1作用的时间T2。
T1=(U3ab-V k+1)T s/(V k-V k+1)(18)
T2=T s-T1(19)由上可知,只要确定两个状态量V k和V k+1的值,就能产生所需的PWM调制信号。并且V k和V k+1满足式(11)取直流侧电压U3ab的设定范围U sm b1=1i s>0 0i s<0 (20) b2=1|U s|> U dc 2 0|U s|< U dc 2 (21) 表3 两个状态量所对应的值 b1b2V k V k+1b1b2S a S b (V k) S a S b (V k+1) i s>0|U s|>0.5U dc U dc U2111-10-1 |U s|<0.5U dc0U210-1-10-1 i s<0|U s|>0.5U dc-U1-U dc010 1-1 1 |U s|<0.5U dc-U10000 11 1 4 仿真结果 系统参数设定如下:网侧电源电压的有效值U s= 220V;网侧电感L s=3m H;网侧漏电阻R s=0.2Ω;直流侧电容C1=C2=2200μF;直流侧电压给定值U dc=400V;负载电阻R L=20Ω;加入L C二次滤波环节:L’2=0.84mF;C’2=3m H;开关频率为f s=2 k Hz。采用Matlab/Simulink进行计算机仿真。 图6为网侧电压U s与电流i s的波形,图7为开 关函数S a和S b的波形,图8为网侧输入端电压U ab的 波形,图9为直流侧电容电压U1、U2和输出电压U dc 的波形。 由图6可知 ,当不考虑网侧电流i s的谐波和畸变时,整流器已达到单位功率因数运行。由图7、图8和 图9可知,虽然该整流器直流侧输出电压U dc比较稳图6 网侧电压U s与电流i s 的波形 图7 开关函数S a和S b的波形 图8 网侧输入端电压U ab的波形 图9 直流侧电压的波形 定,但是直流侧两电容上的电压U1和U2不能较好的平衡。原因在于该PWM整流器的b桥臂为不控二极 (下转第18页) (4)功率管MOSFET离电感较远时,受其影响较小;功率管MOSFET离电感相对近时,受其影响就较大。 (5)在ANS YS中,改变电路的拓扑结构可通过编制“通用程序”[7]来实现。即在进行完一种有限元模型的仿真后,通过修改元器件、导线模型的相应坐标,形成新的拓扑结构,运行后产生新的有限元模型及其结果。这样具有很强的通用性,可以很方便地定量得出空间某个位置的电磁干扰的分布情况。要使那一区域的电磁干扰较小,可以通过改变布线来解决。而且节省了计算时间,提高了效率。 综上所述,采用ANS YS软件对实际开关电路进行有限元分析,可以得到比较直观、清晰的电磁场分布。通过定量分析,对合理的布置电路结构和元件的摆放位置,以及改变电路的拓扑结构具有一定参考价值。 参考文献: [1] Bhim Singh,Brij N Singh,Ambrish Chandra.A Review of Single2Phase Improved Power Quality AC2DC Convert2 ers[J].IEEE transactions on industrial electronics.2003, 50(5):151721522. [2] Y o2Chan Son,Seung2K i Sul.Conducted EMI in PWM Inverter for Household Electric Appliance[J].IEEE transactions on industrial applications.2000,38(5):3472 352. [3] Wei Zhang,Shouzhi Li,Feng Gao.The Modeling And Simulations of The Circuit Element Based On Finite Ele2 ment Methods[C].2005IEEE International Conference on Vehicular Electronics and Safety,Xi’an,China,2005. [4] Sitzia A M,Baker A E,Preston T W.Finite2Element A2 nalysis for Power Electronics EMC Applications[C]. IEEE transactions on magnetics,1996. [5] Y oussef M,Roudet J,Marecha1Y.Near2field character2 ization of power electronics circuits for radiation predic2 tion[C].PESC,1997. [6] 张 伟.电力电子装置的电磁干扰分析[D].西安:西安 理工大学硕士研究生毕业论文,2006. [7] 高 峰,李守智,张 伟.基于有限元法的开关变换电路 的近场特性分析[J].系统仿真学报,2006,18(7):35239. (上接第10页) 管,电路只有6种工作模式。例如在b1b2=11时,假如直流侧电容电压U1>U2,由图3可知,电容电压平衡环节会使得i3s增大。由式(17)、(18)、(19)可知, U3ab减小,V k工作时间T1减小,V k+1工作时间T2增大,则增大了工作状态2的工作时间,电容电压U2增大,从而能够平衡直流侧电容电压。但是当U1 5 结 论 介绍了一种新型单相三电平高功率因数的PWM 整流器电路拓扑,分析了其工作原理,推导出了其数学模型,采用预测直接电流控制作为其控制策略,逻辑开关状态控制作为PWM调制方法,通过计算机仿真,得出该整流器具有能够高功率因数运行,直流侧输出电压稳定,电路结构简单,开关器件减少,成本低等优点。但其缺点是直流侧两电容上的电压略有不平衡。 参考文献: [1] Lin B R,Hsin2Hung L u.A New Control Scheme for Sin2 gle2Phase PWM Multilevel Rectifier with Power2Factor Correction[J].IEEE Trans.Ind.Electron,1999,46:8202 829. [2] Lin B R,Hsin2Hung L u.A Novel PWM Scheme for Sin2 gle2Phase Three2Level Power2Factor Correction Circuit [J].IEEE Trans.Ind.Electron,2000,47:2452252. [3] Osawa C,Matsumoto Y,Mizukami T,Ozaki S.A state2 space modeling and a neutral point voltage control for an N PC power converter[C].Proc.Power Conversion Conf.,1997,1:2252230. [4] Joong2Ho Song,Sung2Joon Cho,Ick Choy,J u2Yeop Choi. New PWM method for single2phase three2level PWM rec2 tifiers[J].Proceedings of the International Symposium on Industrial Electronics,1997,2(2):2832287. [5] 尹忠刚,孙向东,钟彦儒,刘 静.一种新型三相三电平 PWM整流器的研究[J].电力电子技术,2005,39(5): [6] 李 伟,张 黎.交2直2交传动系统网侧变流器预测电流 控制方法的计算机仿真及实现[J].中国铁道科学,2002, 23(6):49254. 三相PWM 整流器控制器设计 PWM 整流器能够实现整流器电网侧的电流为正弦,从而大大降低整流器对电网的谐波污染。PWM 整流器同时能够实现电网侧电流相位的控制,常见的有使得电网侧电流与电源电压同相位,从而实现单位功率因数控制,也可以根据需要使得电网侧电流相位超前或滞后对应的电源相电压,从而实现对电网的功率因数补偿。 三相PWM 整流器主电路和控制系统原理图如图1所示,其中A VR 为直流侧电压外环PI 调节器、ACR_d、ACR_q分别为具有解耦和电源电压补偿功能的dq 轴电流内环PI 调节器,PLL 为电源电压锁相环,SVPWM 为电压空间矢量运算器,Iabc to Idiq、Vabc to ValfaVbeta和Vdq to ValfaVbeta分别为三相静止坐标-两相旋转直角坐标变换、三相静止坐标-两相静止直角坐标变换和两相旋转直角坐标-两相静止直角坐标变换。 图1 基于空间矢量的三相PWM 整流器原理图 根据开关周期平均值概念、三相电压型PWM 整流器开关函数表等,可得到三相电压型PWM 整流器在dq 坐标下微分方程形式和等效电路形式的开关周期平均模型。经过dq 轴电流解耦和电源电压补偿的控制系统结构图如图2所示,其中小写的变量表示该变量的开关周期平均值,大写的变量表示该变量在工作点的值。 v dc d dc q 图2 基于dq 轴电流解耦和电源电压补偿的控制系统结构图 对解耦和电源电压补偿之后的dq 轴等效电路进行工作点附近的小信号分析,即可得到小信号下的传递函数如式(1、(2)和(3)所示,其中L 、R 分别为交流侧的滤波电感及其等效电阻,C 为直流侧滤波电容,Dd 为d 轴在工作点的占空比。 ~ i d (s αd (s ~ i q (s αq (s ~ v dc (s i d (s V dc (1 三相电压型PWM整流器及仿真 ————————————————————————————————作者:————————————————————————————————日期: 电力电子课程设计课程设计报告 题目:三相电压型PWM整流器与仿真 专业、班级: 学生姓名: 学号: 指导教师: 2015年 1 月 6 日 内容得分 1、三相桥式电路的基本原理(10分) 2、整流电路基本原理(10分) 3、pwm控制的基本原理(10分 4、三相电压型pwm整流电路仿真模型(30分) 5、结果分析(30分) 6、程序文件(10分) 总分 摘要:叙述了建立三相电压型PWM整流器的数学模型。在此基础上,使用功能强大的MATLAB软件进行了仿真,仿真结果证明了方法的可行性。 关键词:整流器;PWM;simulink 目录 一任务书 (1) 1.1 题目 (1) 1.2 设计内容及要求 (1) 1.3 报告要求 (1) 二基础资料 (2) 2.1 三相桥式电路的基本原理 (2) 2.2 整流电路基本原理 (4) 2.3 pwm控制的基本原理 (6) 2.4 PWM整流器的发展现状 (6) 三设计内容 (8) 3.1 仿真模型 (8) 3.2 各个元件参数 (11) 3.3 仿真结果 (13) 3.4 结果分析 (15) 四总结 (15) 五参考文献 (15) 一任务书 1.1 题目 三相电压型PWM整流器仿真 1.2 设计内容及要求 设计三相电压型PWM整流器及其控制电路的主要参数,并使用MATLAB软件搭建其仿真模型并验证。 设计要求(pwm整流器仿真模型参数): (1)交流电源电压600V,60HZ (2)短路电容30MVA (3)外接负载500kVar,1MW (4)变压器变比 600/240V (5)0.05s前,直流负载200kw,直流电压500V,0.05s后,通过断路器并联一个相同大小的电阻。 1.3 报告要求 (1)叙述三相桥式电路的基本原理 (2)叙述整流电路基本原理 (3)叙述pwm控制的基本原理 (4)记录参数(截图) (5)记录仿真结果,分析滤波结果 (6)撰写设计报告 (7)提交程序源文件 三相电压源型PWM整流器 PI调节器参数整定的原理和方法 1引言 1.1 PID调节器简介 在工程实际中,应用最为广泛的调节器控制规律为比例、积分、微分控制,简称PID控制,又称PID调节。PID控制器问世至今已有近70年历史,它以其结构简单、稳定性好、工作可靠、调整方便而成为工业控制的主要技术之一。目前,在工业过程控制中,95%以上的控制回路具有PID结构。当被控对象的结构和参数不能完全掌握,或得不到精确的数学模型,控制理论的其它技术难以采用时,系统控制器的结构和参数必须依靠经验和现场调试来确定,这时应用PID控制技术最为方便。PID控制,实际中也有PI和PD控制。PID控制器就是根据系统的误差,利用比例、积分、微分计算出控制量进行控制的,其原理图如图1-1所示。 图1-1 PID控制系统原理图 PID控制器传递函数常见的表达式有以下两种: (1) ()i p d K G s K K s s =++ ,Kp代表比例增益,Ki代表积分增益,Kd代表微 分增益; (2) 1 () p d i G s K T s T s =++ (也有表示成1 ()(1) p d i G s K T s T s =++),Kp代表比 例增益,Ti代表积分时间常数,Td代表微分时间常数。 这两种表达式并无本质区别,在不同的仿真软件和硬件电路中也都被广泛采用。 ?比例(P,Proportion)控制 比例控制是一种最简单的控制方式,其控制器的输出与输入误差信号成比例关系,能及时成比例地反映控制系统的偏差信号,偏差一旦产 生,调节器立即产生控制作用,以减少偏差。当仅有比例控制时系统输 出存在稳态误差(Steady-state error)。 ?积分(I,Integral)控制 在积分控制中,控制器的输出与输入误差信号的积分成正比关系。 对一个自动控制系统,如果在进入稳态后存在稳态误差,则称这个控制 系统是有稳态误差的或简称有差系统(System with Steady-state Error)。 为了消除稳态误差,在控制中必须引入“积分项”。积分项对误差取决 于时间的积分,随着时间的增加,积分项会增大。这样,即便误差很小, 积分项也会随着时间的增加而加大,它推动控制器的输出增大使稳态误 差进一步减小,直到等于零。因此,比例+积分(PI)控制器,可以使系 统在进入稳态后无稳态误差。积分作用的强弱取决于积分时间常数Ti, Ti越大,积分作用越弱,反之则越强。 ?微分(D,Differential)控制 在微分控制中,控制器的输出与输入误差信号的微分(即误差的变化率)成正比关系。自动控制系统在克服误差的调节过程中可能会出现 振荡或者失稳。其原因是在于由于存在有较大惯性组件(环节)或有滞 后(delay)组件,具有抑制误差的作用,其变化总是落后于误差的变化。 解决的办法是使抑制误差的作用“超前”,即在误差接近零时,抑制误 差的作用就应该是零。这就是说,在控制器中仅引入“比例”项往往是 不够的,比例项的作用仅是放大误差的幅值,而目前需要增加的是“微 分项”,它能预测误差变化的趋势,这样,具有比例+微分的控制器,就 电力电子课程设计课程设计报告 题目:三相电压型PWM整流器与仿真专业、班级: 学生姓名: 学号: 指导教师: 2015年 1 月6 日 摘要:叙述了建立三相电压型PWM整流器的数学模型。在此基础上,使用功能强大的MATLAB软件进行了仿真,仿真结果证明了方法的可行性。 关键词:整流器;PWM;simulink 目录 一任务书 (1) 1.1 题目 (1) 1.2 设计内容及要求 (1) 1.3 报告要求 (1) 二基础资料 (2) 2.1 三相桥式电路的基本原理 (2) 2.2 整流电路基本原理 (4) 2.3 pwm控制的基本原理 (6) 2.4 PWM整流器的发展现状 (6) 三设计内容 (8) 3.1 仿真模型 (8) 3.2 各个元件参数 (11) 3.3 仿真结果 (13) 3.4 结果分析 (15) 四总结 (15) 五参考文献 (15) 一任务书 1.1 题目 三相电压型PWM整流器仿真 1.2 设计内容及要求 设计三相电压型PWM整流器及其控制电路的主要参数,并使用MATLAB 软件搭建其仿真模型并验证。 设计要求(pwm整流器仿真模型参数): (1)交流电源电压600V,60HZ (2)短路电容30MVA (3)外接负载500kVar,1MW (4)变压器变比600/240V (5)0.05s前,直流负载200kw,直流电压500V,0.05s后,通过断路器并联一个相同大小的电阻。 1.3 报告要求 (1)叙述三相桥式电路的基本原理 (2)叙述整流电路基本原理 (3)叙述pwm控制的基本原理 (4)记录参数(截图) (5)记录仿真结果,分析滤波结果 (6)撰写设计报告 (7)提交程序源文件 三相电压型PWM 整流器建模及控制 摘要:本文通过基尔霍夫定律完成了对三相电压型PWM 整流器在三相静止对称坐标系下的数学建模。并通过MATLAB/SIMULINK 仿真工具对其数学模型进行了仿真验证,可以看出,仿真验证的结果证明了模型的准确性和可靠性。而后又介绍了一种直接电流控制方法即传统的双闭环PID 控制,并进行了仿真分析。 1 基于基尔霍夫定律对三相VSR 系统建模 三相电压型PWM 整流器的电路拓扑结构如图1-1所示。图中a u 、b u 、c u 为三相交流电源,L 和C 分别为滤波电感和滤波电容,R 是滤波电感的等效电阻, s R 是开关管的等效电阻。 记网侧三相交流电流分别为a i 、b i 、c i ,整流电流为dc i ,流过负载电阻的电流为L i ,负载两端电压为d c v 。 L e i O L 图1-1 三相电压型PWM 整流器电路图 针对三相VSR 一般数学模型的建立,通常作以下假设: (1) 电网电动势为三相平衡的正弦波电动势(a u ,b u ,c u )。 (2) 网侧滤波电感L 是线性的,且不考虑饱和。 (3) 功率开关管损耗以电阻s R 表示,即实际的功率开关管可由理想开关与损耗电阻s R 串联等效表示。 (4) 为描述VSR 能量的双向传输,三相VSR 其直流侧负载由L R 和直流电动势 L e 串联表示。当直流电动势0L e =时,三相 VSR 只能运行于整流模式;当L dc e v >时,三相VSR 既可运行于整流模式,又可运行于有源逆变模式;当L dc e v <时,三相VSR 则运行于整流模式。 为分析方便,定义单极性二值逻辑开关函数k s 为 10 k s ?=? ?上桥臂导通,下桥臂关断上桥臂关断,下桥臂导通 (,,)k a b c = (1-1) 将三相VSR 功率开关管损耗等效电阻s R 和交流滤波电感等效电阻l R 合并,记 s l R R R =+,采用基尔霍夫电压定律建立三相VSR a 相回路方程为 ()a a a aN N O di L R i u v v dt +=-+ (1-2) 当1S 导通而2S 关断时,1a s =,且aN dc v v =;当1S 关断而2S 导通时,开关函数0a s =,且0aN v =。由于aN dc a v v s =,上式可写成 ()a a a dc a N O di L R i u v s v dt +=-+ (1-3) 同理,可得b 相、c 相方程如下: ()b b b dc b N O di L R i u v s v dt +=-+ (1-4) () c c c dc c N O di L R i u v s v dt +=-+ (1-5) 考虑三相对称系统,则 a b c u u u ++= 0a b c i i i ++= (1-6) 故 ..3 dc NO k k a b c v v s ==- ∑ (1-7) 在图1-1中,任何瞬间总有三个开关管导通,其开关模式共有328=种,因此,直流侧电流dc i 可描述为 ()dc a a b c b b c a c c b a a b a b c i i s s s i s s s i s s s i i s s s =+++++ ()()()a c a c b b c b c a a b c a b c i i s s s i i s s s i i i s s s ++++++ a a b b c c i s i s i s =++ (1-8) 另外,对直流侧电容正极节点处应用基尔霍夫电流定律,得 dc dc L a a b b c c L dv v e C i s i s i s dt R -=++- (1-9) 则采用单极性二值逻辑开关函数描述的三相VSR 系统的一般数学模型表达式为: 分类号学号 M201071071 学校代码 10487 密级 硕士学位论文 三相电压型PWM整流器控制 学位申请人:万鹏 学科专业:电力电子与电力传动 指导教师:熊健副教授 答辩日期: 2013年1月6日 A Thesis Submitted in Partial Fulfillment of the Requirements For the Degree of Master of Engineering Control of Three Phase Voltage Source PWM Rectifier Candidate : Wan Peng Major : Power Electronics and Electric Drive Supervisor: Prof. Xiong Jian Huazhong University of Science & Technology Wuhan 430074, P.R.China January, 2013 独创性声明 本人声明所呈交的学位论文是我个人在导师的指导下进行的研究工作及取得的研究成果。尽我所知,除文中已标明引用的内容外,本论文不包含任何其他人或集体已经发表或撰写过的研究成果。对本文的研究做出贡献的个人和集体,均已在文中以明确方式标明。本人完全意识到本声明的法律结果由本人承担。 学位论文作者签名: 日期:年月日 学位论文版权使用授权书 本学位论文作者完全了解学校有关保留、使用学位论文的规定,即:学校有权保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权华中科技大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。 保密□,在______年解密后适用本授权书。 本论文属于 不保密□。 (请在以上方框内打“√”) 学位论文作者签名:指导教师签名: 日期:年月日日期:年月日 电力电子课程设计课程设计报告 题目三相电压型PWM整流器与仿真专业、班级: 学生姓名: 学号: 指导教师: 2015年 1 月6 日 摘要:叙述了建立三相电压型PWM 整流器的数学模型。在此基础上,使用功能强 -可编辑修改- 大的MATLAB 软件进行了仿真,仿真结果证明了方法的可行性。关键词:整流器;PWM ;simulink -可编辑修改- 目录 一任务书 (1) 1.1 题目 (1) 1.2 设计内容及要求 (1) 1.3 报告要求 (1) 二基础资料 (2) 2.1 三相桥式电路的基本原理 (2) 2.2 整流电路基本原理 (6) 2.3 pwm 控制的基本原理 (9) 2.4 PWM 整流器的发展现状........................................ 1..0...三设计内容........................................................... 1..1 3.1 仿真模型...................................................... 1..1 3.2 各个元件参数.................................................. 1..5 3.3 仿真结果...................................................... 1..7 3.4 结果分析...................................................... 1..9 四总结............................................................... 2..0 五参考文献........................................................... 2..0 三相PWM整流器在电动汽车充电机上的应用 1 引言 电动汽车(ev)是由电机驱动前进的[1],而电机的动力则是来自可循环充电的电池[2],并且电动汽车对电池的工作特性的要求远超过了传统的电池系统。随着电池技术的提高,因为电动汽车电池系统中的高电压和大电流的以及复杂的充电算法,所以对电池的充电变得越来越复杂[3],这样会对现有的电网造成很大的干扰。因此,需要高效而且失真度低的充电机[4]。 从传统上来讲,充电器可以被分为两个大类:线性电源和开关电源[5][6][7]。线性电源主要有三方面的优势:设计简单,在输出端没有电气噪声而且成本比较低。但是线性电源的充电电路效率低对充电器来说是一个很严重的缺点。使用开关电源可以解决这些问题,开关电源的效率高,体积小而且成本也低。传统的开关电源式充电机采用不可控或者半控器件如晶闸管进行整流,虽然能够得到较为平滑的直流电压,但是同时也给电网注入了大量的无功功率和谐波电流,给电网造成很大的污染[8]。随着电力电子技术的发展,三相电压型pwm整流器(vsr)因其具有功率因数可控、网侧电流趋近于正弦、直流侧电压稳定等优点,应用在汽车充电器中,可以解决功率因数低、谐波电流大等问题[9]。 但是pwm整流器的开关元件在电压和电流全不为零的时候动作会消耗能量[10],而且随着开关频率增加,在开关器件上的损耗会变得越来越大[11]。使用谐振型零电压软开关可以解决这些问题,而且具有很多的优点:功率开关的软切换,在开关过程中的损耗将会很小,反过来会增加充电的效率而且可以增加运行的频率[12]。这样充电机的体积和重量也会得到减小[13]。另外一个好处是,在使用谐振[型软开关后,整流器中电压电流中的谐波含量会得到降低[14]。因此,当谐振型的整流器和传统整流器工作在相同的功率等级和开关频率时,谐振型的整流器造成的emi问题会小很多[15]。使用谐振型的整流[器去提高充电[16]机的功率等级、充电效率、可靠性和其他的工作特性[17]。 三相谐振型逆变器广泛的应用在电机调速控制等领域[20],本文以三相逆变器为原型,设计了三相pwm整流器。并且根据谐振型整流器的特点,对控制方法进行了改进,使其能够达到最低的失真度(df)和最小的总谐波失真(thd)。将它运用在电动汽车充电机上,能够减小充电站的功率因数校正环节的压力,而且由于采用了软开关技术,不会由于增加了可控开关管,而导致充电效率降低,为充电机的大规模并入电网提供了必要条件。 2 充电机的总体拓扑结构 图1从原理上描述了充电机的总体拓扑结构图,图中包括几个主要的部分: (1)emi滤波器:抑制交流电网中的高频干扰对设备的影响,同时屏蔽电动汽车充电机对交流电网造成的干扰; (2)三相pwm整流器:三相pwm整流器应用在充电机上能够提高功率因数,而且能够减少对电网的谐波污染;随着功率因数的提高,充电站功率因数校正(pfc)的压力会得到降低。由于其具有功率因数可控的功能,既可以将它应用在充电机上,也可用作整个充电站的功率因数校正(pfc),因此会有广泛的应用前景,本文将主要对他进行设计。 (3)全桥逆变器:将整流得到的直流电压逆变成高频交流方波,用以通过高频变压器,并通过调节占空比改变输出的电压电流的大小; (4)高频变压器:传输高频交流电能,同时能够将负载和前级电路进行隔离; (5)不可控整流桥:对高频变压器传输的交流方波整流,用于对电池进行充电。 在主电路中受控的主要是三相pwm整流桥和全桥逆变器两个主要环节,但是在提高功率因数和充电效率等方面,需要着重的分析三相pwm整流器的运行机理,所以在下文的讨论中 PWM整流电路的原理分析 摘要:无论是不控整流电路,还是相控整流电路,功率因数低都是难以克服的缺点.PWM整流电路是采用PWM控制方式和全控型器件组成的整流电路,本文以《电力电子技术》教材为基础,详细分析了单相电压型桥式PWM整流电路的工作原理和四种工作模式。通过对PWM整流电路进行控制,选择适当的工作模式和工作时间间隔,交流侧的电流可以按规定目标变化,使得能量在交流侧和直流侧实现双向流动,且交流侧电流非常接近正弦波,和交流侧电压同相位,可使变流装置获得较高的功率因数。 1 概述 传统的整流电路中,晶闸管相控整流电路的输人电流滞后于电压,其滞后角随着触发角的增大而增大,位移因数也随之降低。同时输人中谐波分量也相当大,因此功率因数很低。而二极管不控整流电路虽然位移因数接近于1,但输人电流中谐波分量很大,功率因数也较低。 PWM整流电路是采用PWM控制方式和全控型器件组成的整流电路,它能在不同程度上解决传统整流电路存在的问题。把逆变电路中的SPWM控制技术用于整流电路,就形成了PWM整流电路。通过对PWM整流电路进行控制,使其输人电流非常接近正弦波,且和输人电压同相位,则功率因数近似为1。因此,PWM整流电路也称单位功率因数变流器。 参考文献[1]在第6章“PWM控制技术”中增添了“PWM整流电路及其控制方法”这一部分内容。但在PWM整流电路的工作原理中介绍篇幅较少,只是针对PWM整流电路的运行方式相量图进行分析,没有分析其工作过程。对PWM 整流电路不熟悉的教师在了解这部分内容时普遍感觉吃力。 1 单相电压型桥式PWM整流电路 电压型单相桥式PWM整流电路最早用于交流机车传动系统,为间接式变频电源提供直流中间环节,其电路如图I所示。每个桥臂由一个全控器件和反并联的整流二极管组成。L为交流侧附加的电抗器,在PWM整流电路中是一个重要的元件,起平衡电压、支撑无功功率和储存能量的作用。为简化分析,可以忽略L的电阻。 图 1 电压型单相桥式PWM整流电路 除必须具有输人电感外,PWM整流器的电路结构和PWM逆变电路是相同的。按照 PWM整流器控制技术的发展 文章分别就PWM整流器控制技术的基本原理及其主要特点、三相电压型和电流型PWM整流器主要控制技术的原理进行阐述。此外还分析国内外对PWM 整流器控制技术的研究现状,并对其发展趋势进行展望。 从电力电子技术发展来看,传统的相控整流器应用时间较长,技术也成熟且被广泛应用,但其存在如下的诸多问题。 1).晶闸管换相引起网侧电压波形畸变。 2).网侧谐波电流对电网产生谐波“污染”。 3).深控时网侧功率因数降低。 4).闭环控制时动态响应相对较慢。 针对这些问题,PWM整流器进行了全面的改进。其关键性的改进在于用全控型功率开关管取代了半控型功率开关管和二极管,以PWM斩控整流取代了相控整流或不控整流。因此PWM整流器就取得了以下的优良性能。 1).网侧电流为正弦波。 2).网侧功率因数控制。 3).电能双向传输。 4).较快的动态控制响应。 由于电能的双向传输,当PWM整流器从电网吸取电能时,其运行于整流工作状态,而当PWM整流器向电网传输电能时,其运行于有源逆变工作状态。所谓单位功率因数是指当PWM整流器运行于整流状态时,网侧电压、电流同相正阻特性,当PWM整流器运行于有源逆变状态时,网侧电压、电流反相、负阻特性。进一步研究表明,由于PWM整流器网侧电流及功率因数均可控。因而可被推广应用于有源电力滤波及无功补偿等非整流器应用场合。 综上可见,PWM整流器实际上是一个交、直流可控的四象限,运行变流装置。控制技术是决定PWM整流器发展的关键因素,PWM整流控制对象是输入电流和输出电压,其中输入电流控制是整流器控制的关键。这是由于应用PWM 整流器的目的是使输入电流正弦化,在单位功率因数下运行。对输入电流有效控制实质就是对电力电子变换器的能量流动进行控制,进而控制输出电压。相反, 空间矢量的广义仿真与实验研究三相电压源逆变器的脉宽调制技术 文摘 调速驱动系统需要可变电压和频率总是从三相获得供应电压源逆变器(VSI)。一定数量的脉冲宽度调制(PWM)用于获取可变电压和方案从一个逆变器频率供应。最广泛使用的三相逆变器是舰载正弦脉宽调制方案脉宽调制和空间矢量脉宽调制(SVPWM)。有增加趋势,利用空间矢量PWM(SVPWM)因为他们的简单数字的认识和更好的直流总线利用率。然而,一个合适的仿真模型还没有可用的文学。因此,本文在一步一步的发展SVPWM紧随其后的MATLAB / SIMULINK仿真模型实验的实现。首先讨论了三相逆变器的模型基于空间向量表示。下一个简单和灵活的仿真模型的SVPWM的方法,使用MATLAB / SIMULINK开发。发达模型一般自然,因为它可以利用来实现连续和不连续空间矢量。论文的新颖性依赖提议的灵活和通用SVPWM的Matlab / Simulink仿真模型。实验及仿真结果验证该模式 关键词:空间矢量PWM 不连续PWM电压源逆变器 1.介绍 三相电压源逆变器广泛应用于变速交流电动机驱动应用程序因为他们提供变量电压和通过脉冲宽度调制控制变频输出。持续改进和高成本开关频率的功率半导体器件和机器控制算法的发展导致越来越感兴趣更精确的PWM技术。的工作已经在这个方向进行,评估的流行技术提出了由霍尔兹(1992)和霍尔兹(1994)。使用最广泛的是舰载sine-triangle PWM脉宽调制方法由于简单的实现方法在模拟和数字实现。在此方法中,然而,直流总线利用率低,直流5 V,这导致了客观的调查其他技术改善直流总线利用率。它是Houdsworth和格兰特(1984)发现注入零序(第三次谐波)扩展了范围的操作调制器15.5%。与大功率传动的应用程序相关的主要问题是高在逆变器开关的损失。来降低切换损失称为不连续PWM脉宽调制技术(DPWM)是由Depenbrock(1977)和Kolar et al。(1991)。拟议中的不连续PWM技术是基于triangle-intersection-implementation中非正弦调制信号与三角载波比较。一个广义不连续脉宽调制算法提出的有et al。(1998)包括的技术Depenbrock Kolar(1977)和:et al。(1991)。 第1章绪论 1.1PWM整流器概述 随着电力电子技术的发展,功率半导体开关器件性能不断提高,已从早期广泛使用的半控型功率半导体开关,如普通晶闸管(SCR)发展到如今性能各异且类型诸多的全控型功率开关.如双极型晶体管(BJT)、门极关断晶闸管(GTO)、绝缘栅双极型晶体管(IGBT)、集成门极换向晶闸管(IGcT)、电力场效应晶体管(MOSFET) 以及场控晶闸管(McT)等。而20世纪90年代发展起来的智能型功率模块(IPM)则开创了功率半导体开关器件新的发展方向。功率半导体开关器件技术的进步,促进了电力电子变流装置技术的迅速发展,出现了以脉宽调制(PWM)控制为基础的各类变流装置,如变频器、逆变电源、高频开关电源以及各类特种变流器等,这些变流装置在国民经济各领域中取得了广泛应用。但是,目前这些变流装置很大一部分需要整流环节以获得直流电压,由于常规整流环节广泛采用了二极管不控整流电路或晶闸管相控整流电路.因而对电网注入了大量谐波及无功,造成了严重的电网“污染”。治理这种电网“污染”最根本措施就是,要求变流装置实现网侧电流正弦化且运行于单位功率因数。因此,作为电网主要“污染”源的整流器,首先受到了学术界的关注,并开展了大量研究工作。其主要思路就是将PWM 技术引入整流器的控制之中,使整流器网侧电流正弦化且可运行于单位功率因数。 根据能量是否可双向流动,派生出两类不同拓扑结构的PWM整流器,即可逆PWM 整流器和不可逆PWM整流器。本论文只讨论能量可双向流动的可逆PWM整流器及控制策略,以下所称PWM整流器均指可逆PWM整流器。 第2章PWM整流器的拓扑结构及工作原理 2.1PWM整流器原理概述 从电力电子技术发展来看,整流器是较早应用的一种AC/DC变换装置。整流器的发展经历了由不控整流器(二极管整流)、相控整流器(晶闸管整流)到PWM 整流器(可关断功率开关)的发展历程。传统的相控整流器,虽应用时间较长,技术也较成熟,且被广泛使用,但仍然存在以下问题: (1) 晶闸管换流引起网侧电压波形畸变; (2) 网侧谐波电流对电网产生谐波“污染”;. (3) 深控时网侧功率因数降低; (4) 闭环控制时动态响应相对较慢。 摘要 随着绿色能源技术的快速发展,PWM整流器技术己成为电力电子技术研究的热点和亮点。PWM整流器可成为用电设备或电网与其它电气设备的理想接口,因为它可以实现网侧电流正弦化和功率因数可调整。 本文首先分析了PWM整流器的基本原理,然后根据三相电压源型PWM整流器各相电压电流之间的关系和桥路的工作状态,给出系统在三相ABC坐标系和两相dq坐标系中的数学模型,利用电流反馈解耦控制,以及系统的基本控制框图。并设计了电压环和电流环数字化PI调节器,结合理论分析和实际对其参数进行了优化整定。 关键词:三相电压型PWM整流器;数学模型;dq变换。 1 三相电压源型PWM 整流器工作原理及数学模型 1.1 PWM 整流器原理 1.1.1 PWM 整流电路工作原理 将普通整流电路中的二极管或晶闸管换成IGBT 或MOSFET 等自关断器件,并将SPWM 技术应用于整流电路,这就形成了PWM 整流电路。通过对PWM 整流电路的适当控制,不仅可以使输入电流非常接近正弦波,而且还可以使输入电流和电压同相位,功率PWM 整流电路由于需要较大的直流储能电感以及交流侧LC 滤波环节所导致的电流畸变、振荡等问题,使其结构和控制复杂化,从而制约了它的应用和研究。相比之下,电压型PWM 整流电路以其结构简单,较低的损耗等优点,电压型PWM 整流电路的成功应用更现实鸭故选择电压型PWM 整流电路进行研究。下面分别介绍单相和三相PWM 整流电路的拓扑结构和工作原理。 图1-2 单相PWM 整流电路 图1-2为单相全桥PWM 整流电路,交流侧电感s L 包含外接电抗器的电感和交流电源内部电感,是电路正常工作所必需的。电阻s R 包含外接电抗器的电阻和交流电源内部电阻。同SPWM 逆变电路控制输出电压相类似,可在PWM 整流电路的交流输入端AB 产生一个正弦调制PWM 波AB u ,AB u 中除含有和开关频率有关的高次谐波外,不含低次谐波成分。由于电感s L 的滤波作用,这些高次谐波电压只会使交流电流 浅述PWM型整流器 061230105 何卓 电力电子技术是现代电工技术中最活跃的领域,并且在电力系统中得到日益广泛的应用。电力电子技术根据用电场合而改变电能的应用方式,即所谓“变流”,使得电能的应用更好地满足人们的需求,并通过功能和性能的提高产生经济效益和社会效益。因此,电力电子技术又被认为是电能应用的优化技术。 除了线性功率放大的场合,电力电子装置中的功率器件大多工作于开关状态,这种电力电子装置不加控制的扩大应用,带来的一个副作用就是电网的“污染”。例如传统的二极管整流器和晶闸管相控整流器,其运行过程中,网侧电流均含有大量谐波,且总的功率因数较低,大量应用所导致的电磁兼容问题可能会造成严重的后果,因此必须加以限制。 环保意识的提高,促使人们在电力电子技术的发展中探索一条“绿色”之路。对变流装置而言,“绿色”的内涵应包括电网无谐波污染、单位功率因数,以及功率控制系统的高性能、高稳定性、高效率等传统变流装置所不具备的优越性能。“绿色”电能变换的需求呼唤着电力电子技术的发展,而电力电子技术的发展又促进了“绿色”电能变换的实现。PWM 整流器作为各种电力电子应用系统与电网的接口,其发展方向是将变流技术与微电子技术和自动控制技术相融合,已成为电力电子技术发展中的热点和亮点。 PWM控制技术的应用与发展为整流器性能的改进提供了变革性的思路和手段,结合了PWM控制技术的新型整流器称为整流器。经过20多年的研究与探索,PWM控制技术已成功应用于整流器的设计中,使整流器获得了前所未有的优良性能。 与传统的整流器相比,PWM整流器不仅获得了可控的AC/DC变换性能,而且可实现网侧单位功率因数和正弦波电流控制,甚至能使电能双向传输。一般称电能可双向传输的PWM整流器为可逆PWM整流器。由于可逆PWM整流器不仅体现出PWMAC/DC 变流特性(整流),而且还可呈现出PWMDC/AC变流特性(有源逆变),因而确切地说,可逆PWM整流器实际上是一种新型的可四象限运行的变流器。 随着PWM控制技术的发展,如空间矢量PWM(SVPWM)、滞环电流PWM控制等方案的提出,以及现代控制理论和智能控制技术的发展和应用,PWM整流器的性能得到了不断提高,功能也不断扩展。PWM整流器网侧独特的受控电流源特性,使得PWM 整流器作为核心被广泛应用于各类电力电子应用系统中,这些应用系统主要有:(1)功率因数校正(PowerFactorCorrector—PFC);(2)静止无功补偿(StaticVarCompensator—SVC);(3)有源电力滤波(ActivePowerFilter—APF); (4)统一潮流控制器(VnifiedPowerFlowController); (5)超导储能(SuperconductingMagneticEnergyStorage—SMES); (6)高压直流输电(HighVoltageDirectCurrentTransmission—HVDC); (7)可再生能源并网发电;三相PWM整流器控制器设计(精)
三相电压型PWM整流器及仿真
三相电压型PWM整流器PI调节器参数整定的原理和方法
三相电压型PWM整流器与仿真
三相电压型PWM整流器建模及控制
三相电压型PWM整流器控制
三相电压型PWM整流器及仿真
三相PWM整流器在电动汽车充电机上的应用
PWM整流电路工作原理
PWM整流器控制技术的发展
三相pwm整流器
三相电压型PWM整流器仿真课程设计
三相PWM整流器
浅述PWM型整流器
相关主题
文本预览