
基于异步电机的风力机模拟实验平台的方案设计
摘要:提出一种风力机模拟研究和实验平台的设计方案,利用异步电动机矢量控制方式驱动发电机运行。利用DSP完成风力机数学模型的数学模拟,并提出矢量控制的方案,最终给出硬件实现的设备选择,为下一步完成实验平台的建设做好铺垫。
关键词:风力机数学模型;三相异步电动机;矢量控制;设备选择
1 引言
风能是一种无污染可再生的绿色能源,为各国政府的重要选择。实验室的先期探索对风力发电技术的发展起着重要的引导作用。但是由于条件的限制大多数实验室不具备风场环境或风力机,这为风力发电技术的实验研究带来了很大困难。因此探讨在实验室条件下,如何模拟风力机特性是深入研究风力发电技术的前提,具有重要的现实意义。
本实验平台设计以异步交流电机模拟风机的方案,构建包括硬件平台和控制软件在内的完整的风力机模拟控制系统。通过采取合适的控制策略,使整个风力机模拟系统符合实际的风力机特性,用其驱动风力发电机,达到模拟真实自然界中风力发电系统工作的效果。
2 风力机模拟系统的构成
实际的风力发电系统如图1所示。
图1 实际风力发电系统
在实验室中模拟风力机,也就是将图1中的实际的风力机用风力模拟系统取代,如图2所示。
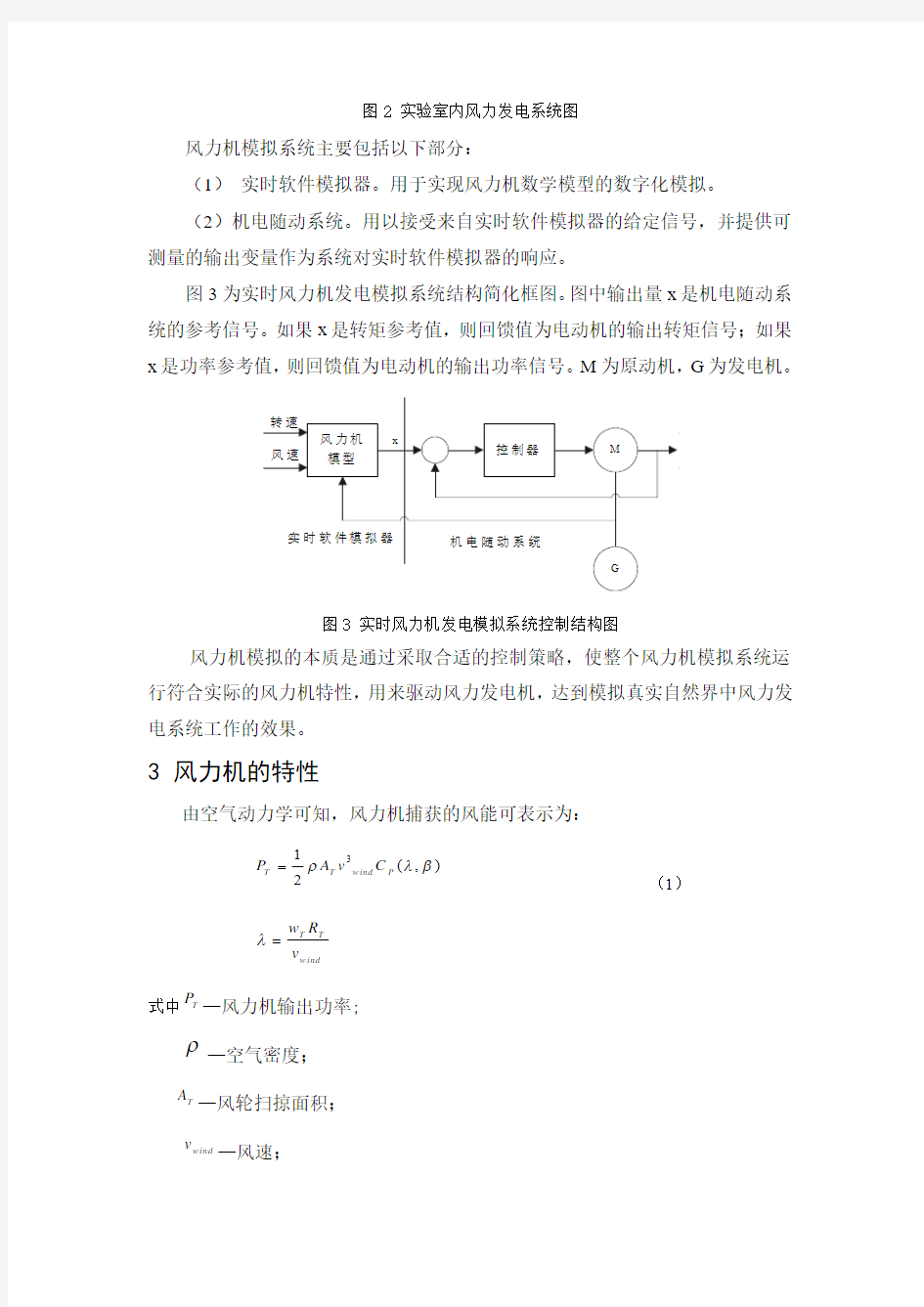
图2 实验室内风力发电系统图
风力机模拟系统主要包括以下部分:
(1) 实时软件模拟器。用于实现风力机数学模型的数字化模拟。 (2)机电随动系统。用以接受来自实时软件模拟器的给定信号,并提供可测量的输出变量作为系统对实时软件模拟器的响应。
图3为实时风力机发电模拟系统结构简化框图。图中输出量x 是机电随动系统的参考信号。如果x 是转矩参考值,则回馈值为电动机的输出转矩信号;如果x 是功率参考值,则回馈值为电动机的输出功率信号。M 为原动机,G 为发电机。
图3 实时风力机发电模拟系统控制结构图
风力机模拟的本质是通过采取合适的控制策略,使整个风力机模拟系统运
行符合实际的风力机特性,用来驱动风力发电机,达到模拟真实自然界中风力发电系统工作的效果。
3 风力机的特性
由空气动力学可知,风力机捕获的风能可表示为:
31(,)
2
T T w ind
P P A v
C ρλβ=
(1)
T T w ind
w R v λ=
式中T
P —风力机输出功率; ρ
—空气密度;
T
A —风轮扫掠面积; wind
v —风速;
λ—叶尖速比;
β—浆叶节距角;
T w —风轮转速; T
R —风轮半径;
(,)
P C λβ—风能利用系数。
由风力机从风中捕获的功率为:
T T T
P T w =
可得到风力机输出机械转矩为:
212
T T T T w ind
T C A R v
ρ=
(2)
式中,
T
T —风力机的机械输出转矩;
T
C —转矩系数,
(,)T P C C λβλ
=.
风能利用系数P
C 反映了风力机从自然风能中吸收能量的大小程度,是表征
风力机效率的重要参数,即单位时间内风轮所吸收的风能与穿过叶轮扫掠面的全部风能之比。不同的风力机所对应的
(,)
P C λβ曲线是不同的,一般
P
C 的值由风
机厂家给定,作为设计和计算的依据。风能利用系数P
C 是叶尖速比λ和浆距角β
的函数,即:
5/2
1346(,)(
)i
c P i
c C c c c e
c λλββλ
λ-=--+
其中,
3
1
1
0.035
0.081
i
λλβ
β=
-
++
针对本实验系统
1234560.5176;116;0.4;5;21;0.0068
c c c c c c ======。
风力机可以分为定浆距与变浆两种,通常,定浆距即0β=风力机的P C
与λ
的关系如下图4所示,
图4 风力机的
P
C 与λ曲线
对于一个特定的风力机,具有唯一的一个对应P C 最大的叶尖速比,称为最佳叶尖速比
o p t
λ,对应的P C 称为最大风能利用系数
m ax
p C 。由图可见,当λ大于或小于
o p t
λ时,
P
C 都小于m ax
p C ,使机组效率降低。
由式(1),(2)推导出风力机不同风速下的转矩曲线如下图5a 所示,图中不同风速下(v5>v4>v3>v2>v1)的对应转矩—转速曲线簇,把每个风速下的最佳转矩点
opt
T 相连,得到
风力机的最优转矩曲线,只要运行在该曲线上,风力机即可捕获到最大风能。图5b 为风力机的功率特性,把功率—转速曲线簇上的最大功率点o p t
P 相连,构成最佳功率曲线,运行在
该曲线亦可捕获最大的风能。
图5 风力机特性曲线
4 风力机模拟系统的模拟方法
在实验室进行风力机特性模拟,主要就是模拟风能转化为机械能这一过程,但在实验室条件中并不具备风场环境或风力机,因此往往采用通过控制直流电机或交流电机转矩来模拟实际的风力机运行情况。
4.1 风速模型
风力作为风力发电机组的原动力,它的变化情况实时影响着整个风力机组的运行状况,因此在实验室开展相关的模拟风力发电系统实验,需要对实际风场的
风场风速情况进行准确有效的模拟。
从可实现角度出发,将自然风速简化为4种典型成分,即基本风W B V 、阵风
W G
V 、渐变风W R V 和随机风W N V 。
在风力机正常运行过程中基本风一直存在,它决定了风力发电机向系统输送
额定功率的大小,基本上反映了风电场平均风速的变化。在风速变化的过程中,阵风描述风速突然变化的特性。渐变风反映风速的渐变特性。随机风反映风速变化的随机特性。
综合这4种风速成份,可以用4种叠加的风速模型模拟实际作用在风力机上的风速
W W B W G W R W N
V V V V V =+++
在以上对风速模型进行理论分析的基础上,可以再MATLAB 环境下进行仿真验证。
4.2 异步电机模拟风力机的实现方法
4.2.1 异步电机模拟风力机的实现原理
风力机是能量转换装置,风力机输出特性模拟的本质是能量或转矩的控制,而非简单的速度调节。因此,正确的模拟思路应该是根据当前风速、机组转速和给定的浆距角,计算出风轮机的输出功率或转矩,将其作为异步电机的控制指令加以执行,本设计采用转矩控制方式来模拟风力机的输出特性。
本平台采用异步电动机在实验室中代替风力机拖动风力发电机,其结构如下图6所示。此处,暂时未考虑变速箱。
图6 风力机模拟实验平台示意图
按照给定的风速和实测的发电机转速,根据上述风力机特性可计算出风力机的输出转矩,并作为异步电动机的控制指令,来控制异步电机的转矩输出。计算转矩用的风力机模型如下图7所示。
图7 风力机数学模型
当风速一定时,风力机输出功率(转矩)与系统转速n有确定的对应关系,在风力机模拟系统中,如果异步电机在稳态时输出功率(转矩)与转速之间的关系符合实际风力机的特性(如图5)即让异步电机运行在风力机的特性曲线上,则达到模拟风力机的目的。
具体实现的基本原理如下图8所示:
图8 风力机模拟的原理图
假设当前风速为v2,所带负载为P1,则系统稳定运行于A点,此时系统转速为n1,风力机输出功率为p1,此时要对风力机的当前状态进行模拟,则只需控制异步电机的转速为n1,输出功率为p1,从而有效模拟了风力机在v2下的一个稳定点A;当风速由v2变到v3,此时若负载还未变化,则风力机加速,最终稳定运行于B点,从而调节异步机,使其输出特性符合B点特性;当负载由p1变为p2,则风力机减速,最终稳定运行于C点,通过调节控制系统使系统最终稳定运行于C点。所以对于风力机特性曲线上的每一点,都可以用一个P-n来表示,控制异步机运行于该点上,即可表现出风力机的特性。
4.2.2 异步电机的矢量控制策略
异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统,不像直流电动机可以通过控制电枢电流来灵活控制电磁转矩。随着矢量控制的发展,异步电机的控制越来越灵活,已达到可与直流机相媲美的性能。矢量控制就是将定子电流的励磁分量与转矩分量解耦,然后通过对转矩分量的控制完成电机转矩的控制,达到调速目的。
本实验平台采用矢量控制策略框图如下图9所示:
图9 基于矢量控制的异步电机模拟风力机控制框图
电机转矩由转矩电流q i确定,故利用转矩电流可方便地控制电机的转矩,实现风力机的模拟。
4.2.3 风力机特性模拟的仿真分析
本平台主要要针对风速变化(此时转速保持不变)以及转速变化(此时风速保持不变)两种情况,在MATLAB∕SIMULINK仿真环境下对风力机系统的运行特性进行仿真分析。
相关仿真参数,电机参数:
(1)风速变化,转速不变情况的仿真。风速分别是8m/s、10m/s、9m/s仿真图形如下图10所示:
图10a 输出转速
图10b 输出转距
5 风力机模拟实验平台的硬件实现
5.1 模拟系统的构成
模拟系统由DSP控制面板、变频器、异步电机、光电编码器、联轴器等主要器件构成。具体构成图如下图10所示。
图11 模拟系统构成图
本实验平台是由风力机数学模型所给出的气动转矩信号作为整个系统的给定,控制异步电机运行在风力机特性曲线上。风力机模拟实验平台主要包括以下部分:
(1)风力机数学模型通过对风力机特性曲线的分析,经由编程在DSP2812中建立风力机输出特性数学模型,输出气动转矩信号作为矢量控制系统的转矩给定。
(2)矢量控制系统该部分实现①变频器完成,风力机数学模型计算出的转矩信号作为变频器的控制信号。此变频器应可以采用空间矢量PWM方式完成对原动机转矩的控制,以拖动原动机实现风力机模拟。②利用逆变器控制,DSP2812通过采集到的风速与转速,查表得到相应转矩,作为矢量控制的输入,通过SVPWM 模块产生六路控制脉冲,作用于电压型逆变器功率元件,输出三相交流电压,使
原动机按照给定的转矩运行,即模拟出风力机的特性。
(3)原动机由一台2.2KW异步电动机作为风力机模拟器的原动机,来拖动同轴连接的发电机。
(4)发电机异步电动机与发电机同轴相连,所以稳态时两者具有相同的转速和转矩。发电机通过控制面板给定转速来控制两台电机转速。此实验平台可先选用与原动机同型号的异步机作为发电机进行初步试验研究探索,暂时不进行并网研究。后续工作中可进行以下工作:①采用AC/DC/AC变流器并网发电,发电机同样采用实现间接磁场定向控制实现转速调节,而并网逆变器采用电网电压定向的矢量控制实现直流电压和功率因数的控制;②更换电机,完成双馈发电机发电并网的实验研究。
风力机数学模型输出的气动转矩是由原动机部分的光电编码器所测转速和给定风速经由数学模型计算得到,给定风速可由基于DSP2812控制面板给定,也可通过编程来模拟阵风等较为复杂的实际情况。
5.2 硬件设备选择
根据系统控制功能,硬件平台分成交流电机拖动系统、驱动系统、控制系统。
交流电机拖动系统由2台三相异步电动机、接触器、断路器、熔断器、光电编码器、联轴器组成。
驱动系统:变频器或由逆变器及相应驱动隔离电路组成。
控制系统:F2812控制板、继电器等组成。
具体设备选择如下:
(1)2台同型号三相异步电动机(2.2KW),1台异步机作为原动机,1台异步机作为发电机。
初步可选择的三相异步电动机型号为:
①Y90L-2,2级,同步转速3000r/min,价格339元∕台。
②Y100L1-4,4级,同步转速1500r/min,价格465元∕台。
具体参数如下:
(2)变频器或1台电压型逆变器。
变频器型号:
①普传三相2.2KW高性能矢量变频器,PI8100矢量系列,价格930元∕台。功率范围:0.4-630kW,频率范围:0.00~400.00Hz,电压等级:220V/380V/460V/575V/660V/1140V。
②三菱FR-A740-2.2K-CH T高性能矢量变频器,3577.60元∕台。
③台达VFD-C200系列高性能矢量变频器VFD022C43A,2245元∕台。
④安川电机公司生产,VARISPEEP G7,CIMR-G7B42P2。此型号变频器的额定电压为400V,适配电机额定功率为2.2KW,6830元∕台。
(3)主控制面板(DSP2812和外围电路组成)。
(4)光电编码器(采集转速)。
可选择EL42A(1024,24V,推挽式输出),价格100元。
(5)联轴器
(6)热继电器、接触器、熔断器。
熔断器选用电机额定电流的3-5倍,接触器选1.5倍以上,不用超过2倍,热继电器选用比电机电流可偏大一点。
2.2kW三相电动机额定电流为I=4.2A,则可选择
熔断器额定电流10A,参考型号L38-10A;
接触器额定电流10A,参考型号CJ10-10;
热继电器额定电流5A,参考型号JR0-5;
(6)整流模块和滤波电路,调压器(矢量控制系统直接采用变频器,则不需要这部分)。
(7)驱动与隔离模块。(矢量控制系统直接采用变频器,则不需要这部分)。5.2 基于TMS320F2812 DSP 的硬件设计
本实验平台中作为矢量控制系统转矩给定的气动转矩控制信号由Ti公司的
TMS320F2812 DSP产生,因此有必要介绍基于F2812 DSP的硬件设计。
TMS320F2812是TI公司推出的一款用于控制系统的高速、多功能、高性价比的32位定点DSP芯片。TMS320F2812 DSP采用哈佛总线结构,具有密码保护机制,可在一个周期内进行双16×16乘加和32×32乘加操作,因而可兼顾控制和快速运算的双重功能,芯片内集成了多种外设,尤其是两个事件管理器为电动机以及功率变换器控制提供了很大的便利,F2812是作为电气传动控制中常用的芯片。
基于F2812硬件设计如下:
(1)最小系统设计。
①时钟电路:为整个DSP芯片提供各种时钟频率。
②复位电路:保证DSP芯片的有序的启动过程。
③供电电源设计:为各种器件供电。
④JTAG仿真口:TI公司提供的TMS320系列DSP芯片均配有JTAG仿真接口,
使用仿真器通过该接口对DSP芯片进行在线调试和仿真。仿真器不占用DSP 芯片的任何资源,是开发DSP系统的重要工具。
⑤外部存储器接口:TMS320F2812提供了一个外部存储器接口。当需要扩展
外部存储器或I/O接口时,该接口提供了相应的各种信号。
(2) DAC7625数模转换电路:由于变频器的外部控制信号需模拟量控制,故选用DAC7625芯片,将数字量转换为模拟量。
(3)光电编码器接口设计。
(4)键盘显示接口设计。
(5)串行外部设备接口(SPI)设计。
(6)保护电路设计:过流保护、过欠压保护、过载保护。
(7)系统的抗干扰设计:消除噪声源、抑制噪声耦合、设计低噪声电路。
6 结束语
希望在吴峰老师和袁老师的指导下,和李涛等4名本科生共同努力下,我们能圆满完成这个平台的设计。
一:系统设置: 1:设置门店信息。 2:设置商品信息。 在基本共通---商品设置 可设置: 零售价取值方法, 商品建档必须选择最小类选中, 新品默认值 自动产生货号设为10位,类别取2位,供应商取后3位(最好用国际条) 调价通过调价单调价 pos设置中,默认会员不能手输,默认不记录收银日志 采购设置中默认订单有效期为一个月 采购设置中选中按主供应商选择商品,以防止商品输入错到其它厂商 二:供应商,商品 1:类别分三层,每层代码长度为2 2:商品建档必须选择最小类选中 3:商品有三种编码,货号(可用条码),自编码(可不设),助记码(拼音简写) 4:购销,代购允许一品多商,联营不允许 购销:按采购金额进行结算。 可一品多商。 可管库存(正常商品) 可不管库存,即为大码,可对应多个单品,无库存,无成本毛利,进货只记帐款,不影响库存 代销:按销量与进货结算货款。 在结算管理中的代销帐款中结算,进入后输入厂商,点击“计算帐款” 代销商品录入时必须选择管理库存 联营:按销售额提成。 不能一品多商 同一扣率的商品可代表多个商品 不管理库存,不做进货,成本以销售额与扣率计算 联营商品不能下订单 商品录入时,联营扣率时输入相应的小数而非百分数 租凭,自产这两块不用 5: 录入商品时,附加条码在保存后再添加,附加供应商也可。 商品录入后,前台立刻生效 6:最低售价即为无论做什么,最低的价格是这个 7:捆绑商品 改包销售:有两种方式 捆绑销售: 用于礼篮等,不能进货,不维护库存。销售时自动冲减成份商品(日结后成功) 录入时选择“捆绑商品”,再在组合商品中设置成本商品
三:采购 1:使用人工订货 2:订货时“商品”键要选择厂商别才能调出商品 3:联营商品不能下订单 4:退货时直接做退货单审核生效,不用做入库 5:对于经常性采购商品可下长期订单,不用每次做单,只是收货时输入数量限可四:调价 1:永久变价在基本共通------调价 可调进价,售价,会员价 日期选择生效日,默认为当天 2:促销变价营销管理--- 促销特价单 日期从今天开始则立即生效,结束日当天为最后一天 每单限量,显示在POS机特价列,全场限量售完后自动恢复原价3:时段变价营销管理--- 时段特价单 时段特价单比促销变价优先级高 4:超量变价 超量变价优先级小于促销变价,也小于时段变价 5:超额奖励 购满多少元可再用多少钱购买超值物品 可设多个档次,比如100,200两个,但只能选其中之一的商品 可设最多可买超值物品的个数限制 五:盘点 1:生成盘点号(可选全盘,类别,单品) 2:点货(可在仓库管理中选中允许POS机盘点,记得盘点后删除) 3:盘点差异报表查看,修改在点货处修改 4:盘点差异处理(可去除不调整的单品)审核 六:收银 收银一旦进入付款状态,则不允许再次输入商品,要注意(POS设置中“按结算可 重新进入销售”可以去消此项 七:日结 在销售管理中---日结执行,每天晚上营业结束后执行 注:每月1号执行完日结后,还要做月结(在综合分析中----月结) 八:生鲜 生鲜商品货号统一为五位号码 折分商品如半边猪折分成五花肉等 半办猪建资料时,选择“自动转货”,(还有称重方式,但与此无关) 在商品组合中,材料中加入五花肉等,不需填入数量 销售时,买五花肉等时,自动减白条肉库存,五花肉等不产生负库存 可做第二级转换 加工商品如熟食红烧排骨
第26卷第2期上海电力学院学报 Vol .26,No .2 2010年4月 Journal of Shanghai U niversity of E lectric Pow er Ap r . 2010 文章编号:1006-4729(2010)02-0123-04水平轴风力机叶轮流场的数值模拟 收稿日期:2009-06-30 作者简介:闫海津(1984-),男,在读硕士,河北沧州人.主要研究方向为水平轴风力机叶片翼型及叶轮流场的数值 模拟.E 2mail:yhaij36@https://www.doczj.com/doc/d816656727.html,. 基金项目:国家自然科学基金(50706025);上海市教育委员会科研项目(07ZZ144). 闫海津,胡丹梅,李 佳 (上海电力学院能源与环境工程学院,上海 200090) 摘 要:利用G AMB I T 建模软件对某大型水平轴风力机进行了整机建模,采用计算流体力学软件F LUE NT 对风力机整机的流场进行了数值模拟,给出了水平轴风力机流场数值模拟的原理和一般性步骤,得到了风力机流场的压力分布、速度分布,以及叶片截面的流动分离情况等结果.对风力机流场的数值模拟和分析可为风力机叶片的设计、改型和研发工作提供一定的指导.关键词:水平轴风力机;叶轮;流场;数值模拟中图分类号:S213;TP335+.4 文献标识码:A Nu meri cal Si m ul ati on of Flow Fi eld for Hor i zont al 2axis W i n d Turbi n e Rotor Y AN Hai 2jin,HU Dan 2mei,L I J ia (School of Ther m al Po w er and Environm ental Engineering,Shanghai U niversity of Electric Po w er ,Shanghai 200090,China ) Abstract : The 3D model of wind turbine blades is built by using the s oft building s oft w are of Ga mbit,and the nu merical si m ulati on of the aer odyna m ic perf or mance of fl ow field f or 3D wind turbine r ot or is made by using computer aer odyna m ic s oft w are .The theory and step s of nu merical si m ulati on of fl ow field f or horiz ontal 2axis wind turbine r ot or is summarized . The p ressure and vel ocity distributi on of fl ow field and the p ressure and vel ocity distributi on ar ound the blades are calculated .Si m ulati on and analyses will op ti m ize the unit design t o i m p r ove the research ability,and p r ovide s ome advice f or the design and research of blades . Key words : horiz ontal 2axis wind turbine;r ot or;fl ow field;numerical si m ulati on 风力机是将自然界的风能转换成机械能并获 得电能的装置.水平轴风力机风轮气动性能对整个风力机的运行特性和使用寿命起决定作用.随着风力发电技术在我国的进一步推广和风力发电机组的广泛应用,对风力机气动性能的预测研究越来越受到重视.目前,国内一些风力机研 究机构对翼型的气动性能进行了大量的模拟和计 算,而风轮和整机的气动性能还主要依靠风洞实验来获得.通过对风力机流场的数值模拟,可以获取叶片的部分气动性能,而且数值模拟的成本要远低于风洞实验的成本.因此,采用数值模拟方法来研究风轮的气动性能对于优化风力机叶片和提
风力发电系统建模与仿真 摘要:风力发电作为一种清洁的可再生能源利用方式,近年来在世界范围内获得了飞速的发展。本文基于风力机发电建立模型,主要完成了以下工作:(1)基于风资源特点,建立了以风频、风速模型为基础的风力发电理论基础; (2)运用叶素理论,建立了变桨距风力机机理模型; (3)分析了变速恒频风力发电机的运行区域与变桨距控制的原理与方法,并给出了机组的仿真模型,为风力发电软件仿真奠定了基础; (4)搭建了一套基于PSCAD/EMTDC仿真软件的风力发电系统控制模型以及完整的风力发电样例系统模型,并且已初步实现风力机特性模拟功能。 关键词:风力发电;风频;风速;风力机;变桨距;建模与仿真 1 风资源及风力发电的基本原理 1.1 风资源概述 (1)风能的基本情况[1] 风的形成乃是空气流动的结果。风向和风速是两个描述风的重要参数。风向是指风吹来的方向,如果风是从东方吹来就称为东风。风速是表示风移动的速度即单位时间内空气流动所经过的距离。 风速是指某一高度连续10min所测得各瞬时风速的平均值。一般以草地上空10m高处的10min内风速的平均值为参考。风玫瑰图是一个给定地点一段时间内的风向分布图。通过它可以得知当地的主导风向。 风能的特点主要有:能量密度低、不稳定性、分布不均匀、可再生、须在有风地带、无污染、分布广泛、可分散利用、另外不须能源运输、可和其它能源相互转换等。 (2)风能资源的估算 风能的大小实际就是气流流过的动能,因此可以推导出气流在单位时间内垂直流过单位截面积的风能,即风能密度,表示如下: 3 ω= (1-1) 5.0vρ 式中, ω——风能密度(2 W),是描述一个地方风能潜力的最方便最有价值的量; /m ρ——空气密度(3 kg); /m
中学信息技术《机器人仿真系统》教案第16课机器人仿真系统 【教学目标】 .知识目标 ◆认识仿真下的虚拟机器人; ◆能用NSTRSS设计场地、构建机器人并利用仿真环境进行组队测试。 2.过程与方法 ◆通过教师演示在虚拟仿真环境下的机器人运行,激发学生兴趣; ◆通过教师讲解虚拟仿真软件,培养学生对新软件的兴趣; ◆通过让学生自己动手调试,体会学习新事物的乐趣。 3.情感态度与价值观 ◆使学生领悟“自由无限,创意无限,只有想不到,没有做不到”的道理; ◆培养学生积极探索、敢于实践、大胆创新的精神和意识。 【教法选择】 示例讲解、任务驱动、辅导答疑。 【教学重点】 .用NSTRSS仿真系统设计仿真场地;
2.搭建仿真机器人; 3.运行仿真。 【教学难点】 .设计场地; 2.搭建仿真机器人。 【教学过程】 一、巩固1日知,引入新知 教师活动 将上节课学生完成的在现实场地中运行的走迷宫机器人进行分组比赛,一是能够检验学生的学习情况,二是能调动起学生的积极性,三是为引入仿真系统做准备。 学生活动 小组合作,调试机器人程序,检查机器人的搭建,准备比赛。 教师活动 通过比赛,提出问题:同学们想不想经常地进行这样的比赛呢?但是在现实中调试,需要很多的时间,而且还需要固定的场地环境等等,非常不方便,我们有没有什么好办法解决这个问颢? 引入纳英特的仿真模拟系统,展示它的特点,与现实情况做比较。 教师给学生演示讲解:
.关于仿真系统 什么是仿真系统?仿真系统是机器人的设计、实现,完全在虚拟的环境中,以虚拟的形式出现,它以优化机器人硬件和软件设计、缩短研发周期、节约成本为特色,解决机器人设计过程的不足。 2.初识NSTRSS软件 NSTRSS是NST科技新近推出的一款以.NET平台为基础,使用microsoftDirectX9.0技术的3D机器人仿真软件。用户通过构建虚拟机器人、虚拟环境,编写虚拟机器人的驱动程序,模拟现实情况下机器人在特定环境中的运行情况。 NSTRSS与市面上的同类产品相比,它具有如下的特点:全3D场景。用户可自由控制视角的位置及角度,甚至以第一人称方式进行场景漫游; 逼真的仿真效果。采用虚拟现实技术,高度接近实际环境下的机器人运动状态,大大简化实际机器人调试过程; 实时运行调试。运行时,依据实际运行情况,调整机器人参数,帮助用户快速实现理想中的效果; 自由灵活的机器人搭建与场地搭建。用户可自由选择机器人及其配件,进行机器人搭建,可自行编辑3D训练比赛场地,所想即所得; 单人或多人的对抗过程。用户可添加多个机器人,自由组队进行队伍间对抗;
风力发电机控制原理 本文综述了风力发电机组的电气控制。在介绍风力涡轮机特性的基础上介绍了双馈异步发电系统和永磁同步全馈发电系统,具体介绍了双馈异步发电系统的运行过程,最后简单介绍了风力发电系统的一些辅助控制系统。 关键词:风力涡轮机;双馈异步;永磁同步发电系统 概述: 经过20年的发展风力发电系统已经从基本单一的定桨距失速控制发展到全桨叶变距和变速恒频控制,目前主要的两种控制方式是:双馈异步变桨变速恒频控制方式和低速永磁同步变桨变速恒频控制方式。 在讲述风力发电控制系统之前,我们需要了解风力涡轮机输出功率与风速和转速的关系。 风力涡轮机特性: 1,风能利用系数Cp 风力涡轮从自然风能中吸取能量的大小程度用风能利用系数Cp表示: P---风力涡轮实际获得的轴功率 r---空气密度 S---风轮的扫风面积 V---上游风速 根据贝兹(Betz)理论可以推得风力涡轮机的理论最大效率为:Cpmax=0.593。 2,叶尖速比l 为了表示风轮在不同风速中的状态,用叶片的叶尖圆周速度与风速之比来衡量,称为叶尖速比l。 n---风轮的转速 w---风轮叫角频率 R---风轮半径 V---上游风速 在桨叶倾角b固定为最小值条件下,输出功率P/Pn与涡轮机转速N/Nn的关系如图1所示。从图1中看,对应于每个风速的曲线,都有一个最大输出功率点,风速越高,最大值点对应得转速越高。如故能随风速变化改变转速,使得在所有风速下都工作于最大工作点,则发出电能最多,否则发电效能将降低。
涡轮机转速、输出功率还与桨叶倾角b有关,关系曲线见图2 。图中横坐标为桨叶尖速度比,纵坐标为输出功率系统Cp。在图2 中,每个倾角对应于一条Cp=f(l)曲线,倾角越大,曲线越靠左下方。每条曲线都有一个上升段和下降段,其中下降段是稳定工作段(若风速和倾角不变,受扰动后转速增加,l加大,Cp减小,涡轮机输出机械功率和转矩减小,转子减速,返回稳定点。)它是工作区段。在工作区段中,倾角越大,l和Cp越小。 3,变速发电的控制 变速发电不是根据风速信号控制功率和转速,而是根据转速信号控制,因为风速信号扰动大,而转速信号较平稳和准确(机组惯量大)。 三段控制要求: 低风速段N<Nn,按输出功率最大功率要求进行变速控制。联接不同风速下涡轮机功率-转速曲线的最大值点,得到PTARGET=f(n)关系,把PTARGET作为变频器的给定量,通过控制电机的输出力矩,使风力发电实际输出功率P=PTARGET。图3是风速变化时的调速过程示意图。设开始工作与A2点,风速增大至V2后,由于惯性影响,转速还没来得及变化,工作点从A2移至A1,这时涡轮机产生的机械功率大于电机发出的电功率,机组加速,沿对应于V2的曲线向A3移动,最后稳定于A3点,风速减小至V3时的转速下降过程也类似,将沿B2-B1-B3轨迹运动。 中风速段为过渡区段,电机转速已达额定值N=Nn,而功率尚未达到额定值P<Pn。倾角控制器投入工作,风速增加时,控制器限制转速升,而功率则随着风速增加上升,直至P=Pn。 高风速段为功率和转速均被限制区段N=Nn/P=Pn,风速增加时,转速靠倾角控制器限制,功率靠变频器限制(限制PTARGET值)。 4,双馈异步风力发电控制系统 双馈异步风力发电系统的示意见图4,绕线异步电动机的定子直接连接电网,转子经四象限IGBT电压型交-直-交变频器接电网。 转子电压和频率比例于电机转差率,随着转速变化而变化,变频器把转差频率的转差功率变为恒压、恒频(50HZ)的转差功率,送至电网。由图4可知: P=PS-PR;PR=SPS;P=(1-S)PS P是送至电网总功率;PS和PR分别是定子和转子功率 转速高于同步速时,转差率S<0,转差功率流出转子,经变频器送至电网,电网收到的功率为定、转子功率之和,大于定子功率;转速低于同步转速食,S>0,转差功率从电网,
1 主要介绍以下七种仿真平台(侧重移动机器人仿真而非机械臂等工业机器人仿真): 1.1 USARSim-Unified System for Automation and Robot Simulation USARSim是一个基于虚拟竞技场引擎设计高保真多机器人环境仿真平台。主要针对地面机器人,可以被用于研究和教学,除此之外,USARSim是RoboCup救援虚拟机器人竞赛和虚拟制造自动化竞赛的基础平台。使用开放动力学引擎ODE(Open Dynamics Engine),支持三维的渲染和物理模拟,较高可配置性和可扩展性,与Player兼容,采用分层控制系统,开放接口结构模拟功能和工具框架模块。机器人控制可以通过虚拟脚本编程或网络连接使用UDP协议实现。被广泛应用于机器人仿真、训练军队新兵、消防及搜寻和营救任务的研究。机器人和环境可以通过第三方软件进行生成。软件遵循免费GPL条款,多平台支持可以安装并运行在Linux、Windows和MacOS操作系统上。 1.2 Simbad Simbad是基于Java3D的用于科研和教育目的多机器人仿真平台。主要专注于研究人员和编程人员热衷的多机器人系统中人工智能、机器学习和更多通用的人工智能算法一些简单的基本问题。它拥有可编程机器人控制器,可定制环境和自定义配置传感器模块等功能,采用3D虚拟传感技术,支持单或多机器人仿真,提供神经网络和进化算法等工具箱。软件开发容易,开源,基于GNU协议,不支持物理计算,可以运行在任何支持包含Java3D库的Java客户端系统上。 1.3 Webots Webots是一个具备建模、编程和仿真移动机器人开发平台,主要用于地面机器人仿真。用户可以在一个共享的环境中设计多种复杂的异构机器人,可以自定义环境大小,环境中所有物体的属性包括形状、颜色、文字、质量、功能等也都可由用户来进行自由配置,它使用ODE检测物体碰撞和模拟刚性结构的动力学特性,可以精确的模拟物体速度、惯性和摩擦力等物理属性。每个机器人可以装配大量可供选择的仿真传感器和驱动器,机器人的控制器可以通过内部集成化开发环境或者第三方开发环境进行编程,控制器程序可以用C,C++等编写,机器人每个行为都可以在真实世界中测试。支持大量机器人模型如khepera、pioneer2、aibo等,也可以导入自己定义的机器人。全球有超过750个高校和研究中心使用该仿真软件,但需要付费,支持各主流操作系统包括Linux, Windows和MacOS。 1.4 MRDS-Microsoft Robotics Developer Studio MRDS是微软开发的一款基于Windows环境、网络化、基于服务框架结构的机器人控制仿真平台,使用PhysX物理引擎,是目前保真度最高的仿真引擎之一,主要针对学术、爱好者和商业开发,支持大量的机器人软硬件。MRDS是基于实时并发协调同步CCR(Concurrency and Coordination Runtime)和分布式软件服务DSS(Decentralized Software Services),进行异步并行任务管理并允许多种服务协调管理获得复杂的行为,提供可视化编程语言(VPL)和可视化仿真环境(VSE)。支持主流的商业机器人,主要编程语言为C#,非商业应用免费,但只支持在Windows操作系统下进行开发。 1.5 PSG-Player/Stage/Gazebo
pos机 百科名片 POS(Pointofsales)的中文意思是“销售点”,全称为销售点情报管理系统,是一种配有条码或OCR码(Opticalcharacterrecognition 光字符码)终端阅读器,有现金或易货额度出纳功能。品种有有线和无线两种或有、无线兼用。POS机与广告易货交易平台的结算系统相联,其主要任务是对商品与媒体交易提供数据服务和管理功能,并进行非现金结算。大宗交易中基本经营情报难以获取,导入POS系统主要是解决零售业信息管理盲点。连锁分店管理信息系统中的重要组成部分。 目录[隐藏] 基本原理 功能用途 设备构件 分类 操作步骤 基本原理 功能用途 设备构件 分类 操作步骤
[编辑本段] 基本原理 POS系统基本原理是先将商品资料创建于计算机文件内,透过计算机收银机联机架构,商品上之条码能 pos机基本原理 透过收银设备上光学读取设备直接读入后(或由键盘直接输入代号)马上可以显示商品信息(单价,部门,折扣...)加速收银速度与正确性。每笔商品销售明细资料(售价,部门,时段,客层)自动记录下来,再由联机架购传回计算机。经由计算机计算处理即能生成各种销售统计分析信息当为经营管理依据 POS机是通过读卡器读取银行卡上的持卡人磁条信息,由P OS操作人员输入交易金额,持卡人输入个人识别信息(即密码),POS把这些信息通过银联中心,上送发卡银行系统,完成联机交易,给出成功与否的信息,并打印相应的票据。POS的应用实现了信用卡、借记卡等银行卡的联机消费,保证了交易的安全、快捷和准确,避免了手工查询黑名单和压单等繁杂劳动,提高了工作效率。
磁条卡模块的设计要求满足三磁道磁卡的需要,即此模块要能阅读1/2、2/3、1/2/3磁道的磁卡。 通讯接口电路通常由RS232接口,PINPAD接口,IRDA接口和RS485等接口电路组成。RS232接口通常为POS程序下载口,PINPAD接口通常为主机和密码键盘的接口,IRDA接口通常为手机和座机的红外通讯接口。接口信号通常都是由一个发送信号、一个接收信号和电源信号组成。 MODEM板由中央处理模块、存储器模块、MODEM模块、电话线接口组成。首先,POS会先检测/RING和/PHONE信号,以确定电话线上的电压是否可以使用,交换机返回可以拔号音,POS拔号,发送灯闪动,开始拔号,由通讯协议确定交换机和P OS之间的信号握手确认等,之后才开始POS的数据交换,信号通过MODEM电路收发信号;完成后挂断,结束该过程。[编辑本段] 功能用途 适用于大、中型超市、连锁店、大卖场、大、中型饭店及一切高水平管理的零售企业。
基于CFD方法的风力机翼型数值模拟 作者:李珺, 宋文龙, LI Jun, SONG Wenlong 作者单位:东北林业大学机电工程学院,哈尔滨,150040 刊名: 大电机技术 英文刊名:Large Electric Machine and Hydraulic Turbine 年,卷(期):2013(4) 参考文献(9条) 1.贺德馨风工程与工业空气动力学 2006 2.原鲲;王希麟风能概论 2010 3.Global Wind Energy Couneil Global Wind Report-Annual market update 2010 2011 4.李俊峰中国风电发展报告2010 2010 5.范忠瑶风力机定常与非定常气动问题的数值模拟研究 2011 6.EMenter Two-equation Eddy Viscosity Turbulence Models for Engineering Applications 1994 7.D.C.Wilcox Turbulence modeling for CFD 1993 8.P.Fuglsang;C.Bak Development of the Riso Wind Turbine Airfoils[外文期刊] 2004(02) 9.D.M.Somers Design and experimental results for the S809 airfoil 1997 引用本文格式:李珺.宋文龙.LI Jun.SONG Wenlong基于CFD方法的风力机翼型数值模拟[期刊论文]-大电机技术 2013(4)
风力发电机及风力发电控制技术综述 摘要:本文分析比较了各种风力发电机的优缺点,介绍了相关风力发电控制技术,风力发 电系统中的应用,最后对未来风力发电机和风力发电控制技术作了展望。 关键词:风力发电机电力系统控制技术 Overview of Wind Power Generators and the Control Technologies SU Chen-chen Abstract:This paper analyzes the advantages and disadvantages of the various wind turbine control technology of wind power, wind power generation system, and finally prospected the future control of wind turbines and wind power technology. 1 引言 在能源短缺和环境趋向恶化的今天,风能作为一种可再生清洁能源,日益为世界各国所重视和开发。由于风能开发有着巨大的经济、社会、环保价值和发展前景,近20年来风电技术有了巨大的进步,风电开发在各种能源开发中增速最快。德国、西班牙、丹麦、美国等欧美国家在风力发电理论与技术研发方面起步较早,因而目前处于世界领先地位。与风电发达国家相比,中国在风力发电机制造技术和风力发电控制技术方面存在较大差距,目前国内只掌握了定桨距风机的制造技术和刚刚投入应用的兆瓦级永磁直驱同步发电机技术,在风机的大型化、变桨距控制、主动失速控制、变速恒频等先进风电技术方面还有待进一步研究和应用[1]。发电机是风力发电机组中将风能转化为电能的重要装置,它不仅直接影响输出电能的质量和效率,也影响整个风电转换系统的性能和装置结构的复杂性。风能是低密度能源,具有不稳定和随机性特点,控制技术是风力机安全高效运行的关键,因此研制适合于风电转换、运行可靠、效率高、控制且供电性能良好的发电机系统和先进的控制技术是风力发电推广应用的关键。本文分析比较了各种风力发电机的优缺点,介绍了相关风力发电控制技术,风力发电系统中的应用,最后对未来风力发电机和风力发电控制技术作了展望。 2 风力发电机 2.1 风电机组控制系统概述 图1为风电机组控制系统示意图。系统本体由“空气动力学系统”、“发电机系统”、“变流系统”及其附属结构组成; 电控系统(总体控制)由“变桨控制”、“偏航控制”、“变流控制”等主模块组成(此外还有“通讯、监控、健康管理”等辅助模块)。各种控制及测量信号在机组本体系统与电控系统之间交互。“变桨控制系统”负责空气动力系统的“桨距”控制,其成本一般不超过整个机组价格5%,但对最大化风能转换、功率稳定输出及机组安全保护至关重要,因此是风机控制系统研究重点之一。“偏航控制系统”负责风轮自动对风及机舱自动解缆,一般分主动和被动两种偏航模式,而大型风电机组多采用主动偏航模式。“变 流控制系统”通常与变桨距系统配合运行,通过双向变流器对发电机进行矢量或直接转矩控制,独立调节有功功率和无功功率,实现变速恒频运行和最大(额定)功率控制。
河南交通职业技术学院 交通信息工程系2011届毕业论文 题目: 作者: 专业: 班级: 指导教师: 完成日期:年月日
POS管理系统的开发与实现 卫原野 (计算机网络08302,河南省洛阳市,471700) 摘要:零售业比如说超市,作为一种现在商业模式,他的发展速度和业态模式的变化快得惊人。超市购物系统也与其他行业一样面临新技术的挑战,为此,超市纷纷开始使用POS管理系统。POS管理系统采用快速的网络技术,通过分布式大型数据库,前台收银POS机,后台业务处理的MIS系统以及上坡的条码扫描技术建立起了超市的信息管理系统,使总部可以实时地对下属机构的运作进行管理。由于个能力和时间限制,仅能开发出单机版的功能和相对简单的系统。客户端开发工具选择Visual C++,数据库服务器选择SQL Server 2000.设计目标终点放在购物过程中,收银的完成和超市管理者对整个超市购物系统的管理上。 关键词:POS管理系统;Visual C++;SQL Server 2000 POS management system design and realize WEI Yuanye (Computer network08302,Luoyang,471700) Abstract: Retail industry such as supermarkets, as a modern business model its development speed and business model changes much faster. Supermarket shopping system or with other industry and as it faces new challenges, for this purpose, supermarkets have started using POS management system. POS management system have used a fast network technology to establish the supermarket’s information management system, so that the secretariat can in real time on the operation of the subsidiary bodies. Because individual capabilities and time limits, only to develop the single version features a relatively simple system. Client development tools, select the Visual C++, database server SQL Server2000. Design goals focus on shopping, sales transactions, checkout completion and supermarket mangers on the supermarket shopping system if management. Key words: POS management system; Visual C++; SQL Server 2000
风力发电系统建模与仿真
风力发电系统建模与仿真 摘要:风力发电作为一种清洁的可再生能源利用方式,近年来在世界范围内获得了飞速的发展。本文基于风力机发电建立模型,主要完成了以下工作:(1)基于风资源特点,建立了以风频、风速模型为基础的风力发电理论基 础; (2)运用叶素理论,建立了变桨距风力机机理模型; (3)分析了变速恒频风力发电机的运行区域与变桨距控制的原理与方法,并给出了机组的仿真模型,为风力发电软件仿真奠定了基础; (4)搭建了一套基于PSCAD/EMTDC仿真软件的风力发电系统控制模型以及 完整的风力发电样例系统模型,并且已初步实现风力机特性模拟功能。 关键词:风力发电;风频;风速;风力机;变桨距;建模与仿真 1 风资源及风力发电的基本原理 1.1 风资源概述 (1)风能的基本情况[1] 风的形成乃是空气流动的结果。风向和风速是两个描述风的重要参数。风向是指风吹来的方向,如果风是从东方吹来就称为东风。风速是表示风移动的速度即单位时间内空气流动所经过的距离。 风速是指某一高度连续10min所测得各瞬时风速的平均值。一般以草地上空10m高处的10min内风速的平均值为参考。风玫瑰图是一个给定地点一段时间内的风向分布图。通过它可以得知当地的主导风向。 风能的特点主要有:能量密度低、不稳定性、分布不均匀、可再生、须在有风地带、无污染、分布广泛、可分散利用、另外不须能源运输、可和其它能源相互转换等。 (2)风能资源的估算 风能的大小实际就是气流流过的动能,因此可以推导出气流在单位时间内垂直流过单位截面积的风能,即风能密度,表示如下: 3 ω= (1-1) 5.0vρ 式中, ω——风能密度(2 W),是描述一个地方风能潜力 /m 的最方便最有价值的量;
1 主要介绍以下七种仿真平台 (侧重移动机器人仿真而非机械臂等工业机器人仿真 : 1.1 USARSim-Unified System for Automation and Robot Simulation USARSim 是一个基于虚拟竞技场引擎设计高保真多机器人环境仿真平台。主要针对地面机器人, 可以被用于研究和教学, 除此之外, USARSim 是 RoboCup 救援虚拟机器人竞赛和虚拟制造自动化竞赛的基础平台。使用开放动力学引擎 ODE(Open Dynamics Engine,支持三维的渲染和物理模拟,较高可配置性和可扩展性,与 Player 兼容,采用分层控制系统, 开放接口结构模拟功能和工具框架模块。机器人控制可以通过虚拟脚本编程或网络连接使用 UDP 协议实现。被广泛应用于机器人仿真、训练军队新兵、消防及搜寻和营救任务的研究。机器人和环境可以通过第三方软件进行生成。软件遵循免费 GPL 条款, 多平台支持可以安装并运行在Linux 、 Windows 和 MacOS 操作系统上。 1.2 Simbad Simbad 是基于 Java3D 的用于科研和教育目的多机器人仿真平台。主要专注于研究人员和编程人员热衷的多机器人系统中人工智能、机器学习和更多通用的人工智能算法一些简单的基本问题。它拥有可编程机器人控制器, 可定制环境和自定义配置传感器模块等功能, 采用 3D 虚拟传感技术, 支持单或多机器人仿真,提供神经网络和进化算法等工具箱。软件开发容易,开源,基于 GNU 协议,不支持物理计算,可以运行在任何支持包含 Java3D 库的 Java 客户端系统上。 1.3 Webots Webots 是一个具备建模、编程和仿真移动机器人开发平台, 主要用于地面机器人仿真。用户可以在一个共享的环境中设计多种复杂的异构机器人, 可以自定义环境大小, 环境中所有物体的属性包括形状、颜色、文字、质量、功能等也都可由用户来进行自由配置,它使用 ODE 检测物体碰撞和模拟刚性结构的动力学特性, 可以精确的模拟物体速度、惯性和摩擦力等物理属性。每个机器人可以装配大量可
《管理信息系统》 名称:超市pos机管理系统 专业:电子商务 班级: 13电商接本 姓名:穆惠萍 指导教师:商俊燕 成绩: 2014年 9 月 10日
目录 目录 (1) 一、背景介绍 (2) 二、系统分析 (2) (一)初步调查及可行性报告 (2) (二)系统概述 (8) (三)系统的业务流程图分析 (10) (四)系统的数据流程图 (10) 三、系统设计 (12) (一)系统功能结构图设计 (12) (二)数据库设计 (13) (三)输入输出设计 (14) (四)代码设计 (14)
一、背景介绍 据了解,超市pos机管理是一项琐碎、复杂而又十分细致的工作,例如:检索迅速、查找方便、可靠性高、存储量大、保密性好、寿命长、成本低等。这些优点能够极大地提高超市pos机管理的效率,也是超市的科学化、正规化管理的重要条件。这就对超市pos机管理提出了新的要求,用计算机管理系统来管理超市已经成为目前的趋势,使用计算机可以高速,快捷地完成以上工作。在计算机联网后,数据在网上传递,可以实现数据共享,避免重复劳动,规范数据管理行为,从而提高了管理效率和水平。 超时Pos机管理信息系统必须具备如下特点: ●能通过键盘录入当前的销售商品和实收金额; ●自动结算应收金额和找零金额; ●打印购物小票; ●能查询商品销售信息。 二、系统分析 (一)初步调查及可行性报告 1项目名称: 超市POS管理系统进行可行性分析 2说明: 现在是一个信息发达、快步伐、追求高效率的时代,现在的超市POS系统服务效率低,造成很多人排队付账,这就给人们带来了很大的不便;它越来越不能满足广大人民群众的需要,人们希望能更方便更省时就可以办理结算业务;随着人口的不断增长,尤其是学校里的学生人数的猛增,学生们急切希望有的银行卡也可以便随时随地在超市都可以付款;现在计算机网络的高度发现使越来越多的人更喜欢用校园卡或是其他的银行卡自动在超市进行结算
毕业论文题目:750KW风力机叶片建模与模态仿真分析 学院: 专业:机械设计制造及其自动化 班级:学号: 学生姓名: 导师姓名: 完成日期: 2014年6月20日
诚信声明 本人声明: 1、本人所呈交的毕业设计(论文)是在老师指导下进行的研究工作及取得的研究成果; 2、据查证,除了文中特别加以标注和致谢的地方外,毕业设计(论文)中不包含其他人已经公开发表过的研究成果,也不包含为获得其他教育机构的学位而使用过的材料; 3、我承诺,本人提交的毕业设计(论文)中的所有内容均真实、可信。 作者签名:日期:年月日
毕业设计(论文)任务书 题目: 750KW风力机叶片建模与模态仿真分析 姓名学院专业班级学号 指导老师职称教研室主任 一、基本任务及要求: 1、查阅20篇左右文献资料,撰写开题报告和文献综述。 2、确定叶片主要翼形构成、外形参数及载荷。 3、应用三维建模软件建立叶片三维实体模型。 4、应用仿真软件对复合材料叶片进行模态仿真分析。 5、改变叶片转速,讨论复合材料叶片动力刚化效应对振动的影响。 6、按照要求撰写毕业论文和打印图纸。 二、进度安排及完成时间: 2014.2.20-3.5:课题调研(含毕业实习及撰写毕业实习报告)、查阅文献资料。2014.3.6-3.28:撰写文献综述和开题报告。 2014.3.29-4.8:确定叶片主要翼形构成、外形参数及载荷。 2014.4.9-4.19:应用三维建模软件建立叶片三维实体模型。 2014.4.20-4.27:应用仿真软件对复合材料叶片进行模态仿真分析。 2014.4.28-5.5:改变叶片转速,讨论复合材料叶片动力刚化效应对振动的影响。2014.5.6-5.26:撰写毕业论文、完成设计。 2014.5.27-6.10:整理毕业设计资料,毕业答辩。
摘要: 本次课程设计主要事运用机械三维设计软件Solidworks 的COSMOSMotion 插件机械仿真,COSMOSMotion 可将物理运动与SolidWorks 中的装配体信息相结合通过将载荷从COSMOSMotion 无缝传入COSMOSWorks,可以直观显示零部件在单个时间点或整个仿真周期内的应力和位移。完成运动模拟运行后,COSMOSMotion 可提供各种结果可视化工具。通过这些工具,您可获得有关设计性能的高价值分析信息。 通过仿真的学习,我们可以初步了解仿真的基本思想及原理,对于三维设计系统仿真软件的使用也有一定初步的了解及其应用。
目录 摘要---------------------------------------1第一章机械方针的目的意义及任务 一.机械系统仿真的目的意义-----------------3二.机械系统仿真的任务---------------------3第二章机械仿真内容分析 一.平面连杆机构的运动仿真---------------------6 二.活塞式压气机的运动仿真---------------------8 三.凸轮机构运动学与动力学仿真----------------11 四.齿轮机构运动学与动力学仿真----------------14 第三章.总结与体会-------------------------16 参考文献-----------------------------------16
第一章机械系统仿真的目的意义及任务 一.机械系统仿真的目的意义 利用机械系统仿真软件,工程师可以在计算机上建立机械系统的模型,对模型进行各种动态性能分析,然后改进或优化样机设计方案。 机械系统仿真就是一总虚拟样机技术,其核心是利用计算机辅助分析技术进行机械系统的运动学和动力学分析,以确定系统及其各构件的在任意时刻的位置、速度和加速度,同时通过求解代数方程组来确定引起系统及其各构件运动所需要的作用力和反作用力。 运用这种技术,可以可以大大简化机械产品的设计开发过程,大幅度的缩短产品的开发周期,大量减少产品开发费用和成本,明显提高产品的质量,提高产品的性能,获得最优化和创新的设计产品。虚拟模型技术的应用贯串在整个设计过程当中。它甚至可以用在概念设计和方案论证中,设计师可以把自己的经验与想象结合在计算机里的虚拟模型里,让想象力和创造力充分发挥。 二.机械系统仿真的任务 1设计题目平面机构系统仿真分析
天津农学院 计算机科学与信息工程系 《数据库与SQL Server》 教学实习报告 实习名称:超市pos机管理系统设计 专业:软件工程 班级: 2008 级 2 班 学号: 0808054211 姓名:郭文姣 指导教师:赵光煜 成绩: 二010年01 月04 日
目录 1 教学实习的内容 (4) 2 教学实习的目的 (4) 3 教学实习设计介绍 (4) 3.1 设计题目 (4) 3.2 设计目标 (4) 3.3 系统的主要功能 (4) 3.4 系统开发与调试过程 (4) 3.5 技术要点介绍 (13) 4 总结与体会 (14) 5 参考文献........................................ . (15)
引言 数据库在一个信息管理系统中占有非常重要的地位,数据库结构的设计好坏将直接对应用系统的效率以及实现的效果产生影响。数据库设计一般包括以下四个部分:数据库需求分析,数据库概念结构设计,数据库逻辑结构设计,数据库物理结构实现。随着我国超市规模的不断扩大,货物种类变得越来越庞大。这就导致信息不断增多,而超市pos机管理是一项琐碎、复杂而又十分细致的工作,例如:检索迅速、查找方便、可靠性高、存储量大、保密性好、寿命长、成本低等。这些优点能够极大地提高超市pos机管理的效率,也是超市的科学化、正规化管理的重要条件。这就对超市pos机管理提出了新的要求,用计算机管理系统来管理超市已经成为目前的趋势,使用计算机可以高速,快捷地完成以上工作。在计算机联网后,数据在网上传递,可以实现数据共享,避免重复劳动,规范数据管理行为,从而提高了管理效率和水平。
《新能源发电及并网技术》专题报告风力发电系统建模与仿真 学院电气工程学院 专业电气工程 姓名xxxxxxx 学号xxxxxxxxxxxx 2013年6月
目录 1 风资源及风力发电的基本原理 (1) 1.1 风资源概述 (1) 1.2 风力发电的基本原理 (2) 1.3 风力发电特点 (3) 2 风能及风力机系统模型的建立 (3) 2.1风频模型 (3) 2.2 风速模型 (4) 2.3 风力机建模与分析 (5) 3 变桨距风力发电机组控制系统模型 (10) 3.1 变桨距风力发电机组的运行状态 (10) 3.2 变桨距控制系统 (11) 4风力发电控制系统的模拟仿真分析 (13) 4.1 无穷大系统模型的建立 (13) 4.2 风力发电机系统并网模拟仿真分析 (13) 5 结论 (17) 参考文献 (18)
摘要:风力发电作为一种清洁的可再生能源利用方式,近年来在世界范围内获得了飞速的发展。本文基于风力机发电建立模型,建立了以风频、风速模型为基础的风力发电理论基础,运用叶素理论,建立了变桨距风力机机理模型,然后分析了变速恒频风力发电机的运行区域与变桨距控制的原理与方法,并给出了机组的仿真模型,最后搭建了一套基于PSCAD/EMTDC 仿真软件的风力发电系统控制模型以及完整的风力发电样例系统模型,并且已初步实现风力机特性模拟功能。 关键词:风力发电;风频;风速;风力机;变桨距;建模与仿真 1 风资源及风力发电的基本原理 1.1 风资源概述 随着世界工业化进程的不断加快,使得能源消耗逐渐增加,全球工业有害物质的排放量与日俱增,从而造成气候异常、灾害增多、恶性疾病的多发,因此,能源和环境问题成为当今世界所面临的两大重要课题。由能源问题引发的危机以及日益突出的环境问题,使人们认识到开发清洁的可再生能源是保护生态环境和可持续发展的客观需要。可以说,对风力发电的研究和进行这方面的毕业设计对我们从事风力发电事业的同学是有着十分重大的理论和现实意义的,也是十分有必要的。 风力发电起源于20世纪70年代,技术成熟于80年代,自90年代以来风力发电进入了大发展阶段。随着风力发电容量的不断增大,控制方式从基本单一的定桨距失速控制向全桨叶变距控制和变速控制发展。前人在风轮机的空气动力学原理和能量转换原理的基础上,系统分析了定桨距风力发电机组、变桨距风力发电机组、变速风力发电机组的基本控制要求和控制策略,并对并网型风力发电机组的变桨距控制技术进行了一定的研究。变桨距风力发电机组的主要控制是在起动时对风轮转速的控制和并网后对输入功率的控制。通过变距控制可以根据风速来调整桨叶节距角,以满足发电机起动与系统输出功率稳定的双重要求。但由于对运行工况的认识不足,对变桨距控制系统的设计不能满足风力发电机组正常运行的要求,更达不到优化功率曲线和稳定功率输出的要求。 1、风能的基本情况[1] 风的形成乃是空气流动的结果。风向和风速是两个描述风的重要参数。风向是指风吹来的方向,如果风是从东方吹来就称为东风。风速是表示风移动的速度即单位时间内空气流动所经过的距离。