基于参数自整定模糊PID算法的激光热脱附系统
摘要鉴于高功率激光可以使样品的温度升高,本文提出了一种基于参数自整定模糊PID算法的控制器。根据PID参数在线校正,该控制器不仅仅运用于基于模糊经验公式的单个控制对象,还可以有效地处理激光目标指示系统温度控制模型的不确定性、非线性、时变性、滞后性等等性质。在本文中,借助于MATLAB Simulink工具箱,我们进行了一个传统PID控制和模糊自适应PID控制的仿真对比实验。实验结果表明,模糊自适应PID在超调量、建立时间等性能指标上优于传统控制算法,模糊自适应PID可以有效地提高温度控制系统的控制精度。
关键词:激光热脱附系统,温度控制,模糊自适应PID控制器,MATLAB仿真
1引言
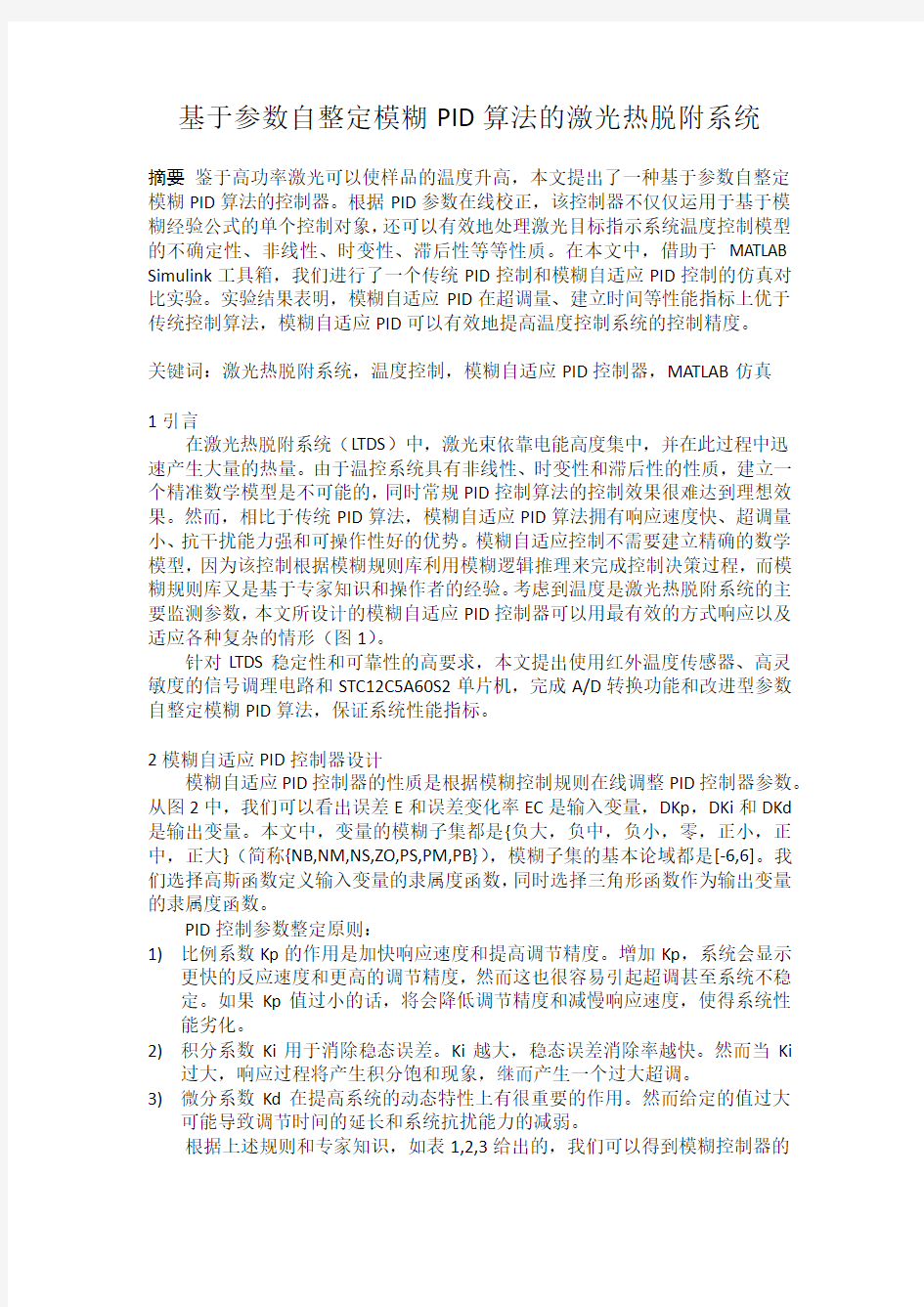
在激光热脱附系统(LTDS)中,激光束依靠电能高度集中,并在此过程中迅速产生大量的热量。由于温控系统具有非线性、时变性和滞后性的性质,建立一个精准数学模型是不可能的,同时常规PID控制算法的控制效果很难达到理想效果。然而,相比于传统PID算法,模糊自适应PID算法拥有响应速度快、超调量小、抗干扰能力强和可操作性好的优势。模糊自适应控制不需要建立精确的数学模型,因为该控制根据模糊规则库利用模糊逻辑推理来完成控制决策过程,而模糊规则库又是基于专家知识和操作者的经验。考虑到温度是激光热脱附系统的主要监测参数,本文所设计的模糊自适应PID控制器可以用最有效的方式响应以及适应各种复杂的情形(图1)。
针对LTDS稳定性和可靠性的高要求,本文提出使用红外温度传感器、高灵敏度的信号调理电路和STC12C5A60S2单片机,完成A/D转换功能和改进型参数自整定模糊PID算法,保证系统性能指标。
2模糊自适应PID控制器设计
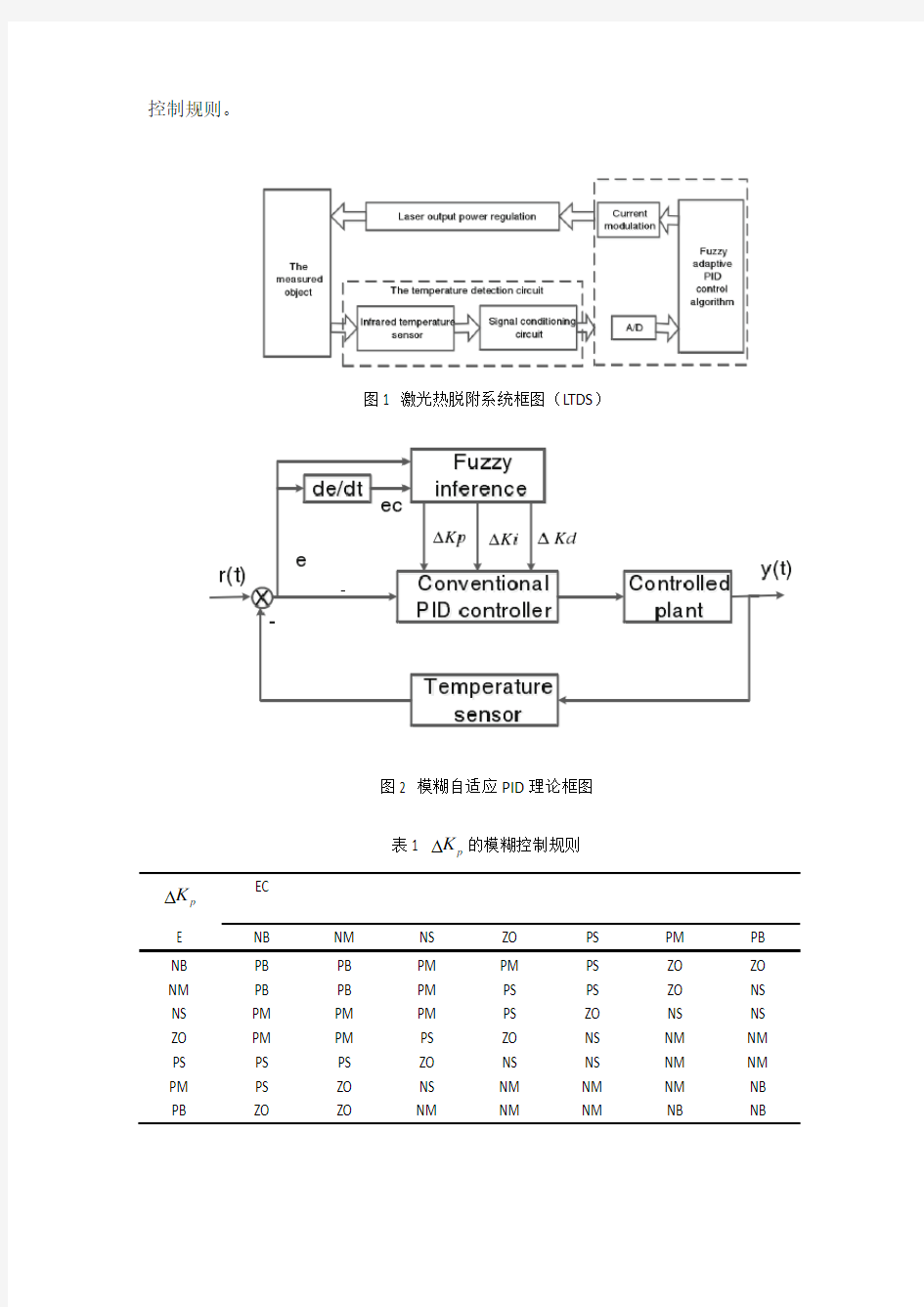
模糊自适应PID控制器的性质是根据模糊控制规则在线调整PID控制器参数。从图2中,我们可以看出误差E和误差变化率EC是输入变量,DKp,DKi和DKd 是输出变量。本文中,变量的模糊子集都是{负大,负中,负小,零,正小,正中,正大}(简称{NB,NM,NS,ZO,PS,PM,PB}),模糊子集的基本论域都是[-6,6]。我们选择高斯函数定义输入变量的隶属度函数,同时选择三角形函数作为输出变量的隶属度函数。
PID控制参数整定原则:
1)比例系数Kp的作用是加快响应速度和提高调节精度。增加Kp,系统会显示
更快的反应速度和更高的调节精度,然而这也很容易引起超调甚至系统不稳定。如果Kp值过小的话,将会降低调节精度和减慢响应速度,使得系统性能劣化。
2)积分系数Ki用于消除稳态误差。Ki越大,稳态误差消除率越快。然而当Ki
过大,响应过程将产生积分饱和现象,继而产生一个过大超调。
3)微分系数Kd在提高系统的动态特性上有很重要的作用。然而给定的值过大
可能导致调节时间的延长和系统抗扰能力的减弱。
根据上述规则和专家知识,如表1,2,3给出的,我们可以得到模糊控制器的
控制规则。
图1 激光热脱附系统框图(LTDS )
图2 模糊自适应PID 理论框图
表1 p K ?的模糊控制规则
p K ?
E NB PB PB PM PM PS ZO ZO NM PB PB PM PS PS ZO NS NS PM PM PM PS ZO NS NS ZO PM PM PS ZO NS NM NM PS PS PS ZO NS NS NM NM PM PS ZO NS NM NM NM NB
表2 i K ?的模糊控制规则
i K ?
EC E NB NM NS ZO PS PM PB NB NB NB NM NM NS ZO ZO NM NB NB NM NS NS ZO ZO NS NB NM NS NS ZO PS PS ZO NM NM NS ZO PS PM PM PS NM NS ZO PS PS PM PB PM ZO ZO PS PS PM PB PB PB
ZO
ZO
PS
PM
PM
PB
PB
表3 d
K ?的模糊控制规则
d K ?
EC E NB NM NS ZO PS PM PB NB PS NS NB NB NB NM PS NM PS NS NB NM NM NS ZO NS ZO NS NM NM NS NS ZO ZO ZO NS NS NS NS NS ZO PS ZO ZO ZO ZO ZO ZO ZO PM PB NS PS PS PS PS PB PB PB
PM
PM
PM
PS
PS
PB
通过模糊推理和重心解模糊法,控制器的三个参数可按照如下公式得到:
p p p K K K ?+=0 (1) d i i K K K ?+=0 (2) d d d K K K ?+=0
(3)
由公式(1)-(3),d d p K K K ???,,都是提前设置好的初始变量(图3,4)。
图3 输入变量(E ,EC )隶属度
图4 输出变量(d d p K K K ???,,)隶属度函数图
3仿真
考虑到由于激光目标指示系统的特殊性,在实际系统实验中很难获得数据,在模糊自适应控制系统仿真使用MATLAB 将有利于实时检测和调试。该控制系统的仿真包括了已经在MATLAB 环境下运行的传统PID 控制器。图5和图6展示了传统PID 控制仿真结构图。
图7,8展示了仿真的结果。图7显示常规PID 控制系统的响应曲线,而图8显示的是参数自整定模糊PID 控制系统的响应曲线。
图6 自适应模糊PID仿真结构图
图7 常规PID系统响应曲线图
图8 模糊自适应PID控制系统响应曲线图
4结论
初步研究表明,引入模糊自适应控制器后,控制系统的动态性能和稳定性大幅提高。在激光目标指示系统中运用模糊自适应控制器使得稳定时间缩短和系统超调消失。因此,本文提出来的参数自整定模糊PID控制器将更加有效得满足要求。