
超级XY曲线控件 例程说明文档 北京亚控科技发展有限公司 2009年6月
目录 1. 功能概述 (1) 2. 工程实例 (1) 3. 操作步骤 (1) 3.1 定义设备 (1) 3.2 定义变量 (1) 3.3 制作画面 (2) 3.4 功能实现说明 (10) 3.5 进入运行系统 (12) 4. 注意事项 (14)
1. 功能概述 常规需求:很多工业现场会用到XY曲线,也就是X轴非时间轴的情况。 组态王中的实现方法: 1)利用组态王内置控件中的X-Y轴曲线,通过调用此控件的函数来实现。 2)利用组态王通用控件中的超级XY曲线,通过调用此控件的属性、方法来实现。 超级XY曲线相对于X-Y轴曲线功能更加强大,使用更方便。其主要优势在于提供了更加灵活方便的控件方法来实现更多的功能,Y轴支持多个坐标,最多可以支持16条曲线,曲线可以保存、调用等,所有的功能都提供了相应的控件方法,可以根据需要灵活的在各种命令语言脚本程序中进行调用。 2. 工程实例 我们举一个例子来说明超级XY曲线控件的使用。在此例程中我们定义三个变量,分别为“压力”、“温度”、“密度”,通过XY曲线来观察压力、温度对于密度的影响。下面就以此为例来演示完成这一要求的具体步骤。 3. 操作步骤 3.1定义设备 新建一个工程,根据工程中实际使用的设备进行定义,本例程使用亚控的仿真PLC 设备,使用“PLC-亚控-仿真PLC-串口”驱动,定义设备名称为“PLC”。 3.2定义变量 在组态王中定义三个变量:压力(IO实数类型)、温度(IO实数类型)、密度(IO 实数类型)。压力变量:最小值0,最大值100,最小原始值0,最大原始值100,连接设备PLC,寄存器INCREA100,数据类型short,读写属性为只读,采集频率1000。 温度变量:最小值0,最大值50,最小原始值0,最大原始值100,连接设备PLC,寄存器DECREA100,数据类型short,读写属性为只读,采集频率1000。 密度变量:最小值0,最大值1,最小原始值0,最大原始值100,连接设备PLC,寄存器INCREA100,数据类型short,读写属性为只读,采集频率1000。
DS1302时钟芯片读写详解 2008-09-26 13:07 /*DS1302读写程序(C51)*/ sbit DS13CLK =P1^5; /*DS1302的SCLK脚脉冲*/ sbit DS13IO =P1^6; /*DS1302的IO脚数据*/ sbit DS13CS =P1^7; /*DS1302的RST脚片选*/ /*向DS1302写一个字节*/ void _wds13byte(uchar _code) { uchar i; DS13CLK =0; DS13CLK =0; for(i=0;i<8;i++) { if(_code&0x01) DS13IO =1; else DS13IO =0; DS13CLK =1; DS13CLK =1; DS13CLK =0; DS13CLK =0; _code =_code >> 1; } } /*从DS1302读一个字节*/ uchar _rds13byte(void) { uchar i,_code; _code=0; DS13CLK =0; DS13CLK =0; DS13IO =1; for(i=0;i<8;i++) { _code =_code >>1; if(DS13IO) _code =_code|0x80; DS13CLK =1; DS13CLK =1; DS13CLK =0; DS13CLK =0; } return _code; } /*读功能_code读功能命令*/ uchar readds1302(uchar _code)
{ DS13CS =0; /*关闭DS1302*/ DS13CLK =0; DS13CLK =0; DS13CS =1; /*使能DS1302*/ _wds13byte(_code); /*读代码*/ _code=_rds13byte(); /*返回读取数字*/ DS13CLK =1; DS13CS =0; /*关闭DS1302*/ return _code; } /*写功能fp写的地址,_code写的内容*/ void writeds1302(uchar fp,uchar _code) { DS13CS =0; /*关闭DS1302*/ DS13CLK =0; DS13CLK =0; DS13CS =1; /*使能DS1302*/ _wds13byte(fp); /*写控制命令*/ _wds13byte(_code); /*写入数据*/ DS13CLK=1; DS13CS =0; /*关闭DS1302*/ } /*******DS1302设置快速充电***************/ void ds13_charg(void) { writeds1302(0x8e,0x00); /*解除写保护*/ writeds1302(0x90,0xa5); /*单二极管2K电阻充电*/ writeds1302(0x8e,0x80); /*置位写保护*/ } ;;;DS1302读写程序(汇编);;; ;******************************************************************* **/ T_CLK Bit P1.5 ;实时时钟时钟线引脚 T_IO Bit P1.6 ;实时时钟数据线引脚 T_RST Bit P1.7 ;实时时钟复位线引脚 ;********************************************************** ;子程序名:Set1302 ;功能:设置DS1302 初始时间,并启动计时。 ;说明: ;调用:RTInputByte ;入口参数:初始时间在:Second,Minute,Hour,Day,Month,Week.YearL(地址连续) ;出口参数:无 ;影响资源:A B R0 R1 R4 R7
打地鼠程序说明文档 项目是一款打地鼠的游戏,程序用到了延时函数、LED、电阻屏、按键灯功能,这些功能的初始化例程里面都有,我们可以直接调用来完成初始化。 完成了初始化就开始程序的主干了,既然我们用到了电阻屏,肯定就需要对它进行校准,校准函数在触摸屏例程也有,我们可以通过KEY0按键直接调用校准函数,用来防止触摸屏不准。 然后我们先进行的是界面显示,先通过图片取模软件取出一个背景图,注意取模的时候由于例程显示那里标注了,在液晶上画图(仅支持:从左到右,从上到下 or 从上到下,从左到右的扫描方式!),图片数据(必须包含图片信息头, 4096色/16位真彩色/18位真彩色/24位真彩色/32位真彩色的图像数据头),针对STM32,不能选择image2lcd的"高位在前(MSB First)"选项,否则imginfo的数据将不正确!我们按照标注选择了16位真彩色的取模方式,通过PS将图片改为屏幕合适尺寸,就可以在屏幕上显示出背景了。将前20行用来显示分数,等级,生命属性,他们通过字符串和数字变量的显示函数来实现,后面300行做成3*3的地鼠洞,地鼠洞通过例程里面的画实心圆来表示,用一个for来遍历每个圆心坐标,让代码简介,在用个随机数函数产生0-8的数字来代表老鼠出现的位置,然后通过同样的方法取出老鼠的图片,根据洞圆心的坐标,找到老鼠显示的坐标显示出老鼠,这里背景是指显示一次的,老鼠变换一次刷新一次屏幕,
刷新就只用刷新你目前的状态,洞的显示和老鼠的位置,让洞把老鼠覆盖就可以不用刷新背景了。再游戏结束之后再重新刷新背景显示游戏结束和继续就好了。 显示完成了接下来就是触摸,由于它的例程里面自带触摸函数,可以直接调用来返回当前的x,y坐标,这样触摸就很容易了key_9=(tp_dev.x[0]+1)/80+3*(tp_dev.y[0]+1-20)/100; 用以上这段代码就可以识别出触摸的是之前分的3*3的那个位置,返回的1-9,然后再和老鼠对应的坐标进行判断就可以知道打对与否,对就加分,分到就升级,升级了就提高地鼠刷新次数,错就减分,减生命,分为0时就不减了,生命为0就游戏结束。还有不管对错,只要点击了屏幕地鼠的持续时间就会减短,马上刷新下一只地鼠。就不用多余的等待。
ds1302时钟程序详解,ds1302程序流程图(C程序) ds1302时钟程序详解 DS1302 的控制字如图2所示。控制字节的最高有效位(位7)必须是逻辑1,如果它为0,则不能把数据写入DS1302中,位6如果为0,则表示存取日历时钟数据,为1表示存取RAM数据;位5至位1指示操作单元的地址;最低有效位(位0)如为0表示要进行写操作,为1表示进行读操作,控制字节总是从最低位开始 输出。 2.3 数据输入输出(I/O) 在控制指令字输入后的下一个SCLK时钟的上升沿时,数据被写入DS1302,数据输入从低位即位0开始。同样,在紧跟8位的控制指令字后的下一个SCLK脉冲的下降沿读出DS1302的数据,读出数据时从 低位0位到高位7。 2.4 DS1302的寄存器 DS1302有12个寄存器,其中有7个寄存器与日历、时钟相关,存放的数据位为BCD码形式,其日 历、时间寄存器及其控制字见表1。 此外,DS1302 还有年份寄存器、控制寄存器、充电寄存器、时钟突发寄存器及与RAM相关的寄存器等。时钟突发寄存器可一次性顺序读写除充电寄存器外的所有寄存器容。 DS1302与RAM相关的寄存器分为两类:一类是单个RAM单元,共31个,每个单元组态为一个8位的字节,其命令控制字为C0H~FDH,其中奇数为读操作,偶数为写操作;另一类为突发方式下的RAM寄存器,此方式下可一次性读写所有的RA M的31个字节,命令控制字为FEH(写)、FFH(读)。
ds1302程序流程图 3.2 DS1302实时时间流程 图4示出DS1302的实时时间流程。根据此流程框图,不难采集实时时间。下面结合流程图对DS1302的基 本操作进行编程:
DS1302 时钟芯片的原理与应用 1 写保护寄存器操作 当写保护寄存器的最高位为0 时,允许数据写入寄存器,写保护寄存器可以通过命令字节8E 8F 来规定禁止写入/读出。写保护位不能在多字节传送模式下写入Write_Enable: MOV Command,#8Eh ;命令字节为8E MOV ByteCnt,#1 ;单字节传送模式 MOV R0,#XmtDat 数据地址覆给R0 MOV XmtDat,#00h 数据内容为0 写入允许 ACALL Send_Byte 调用写入数据子程序 RET 返回调用本子程序处 当写保护寄存器的最高位为1 时禁止数据写入寄存器 Write_Disable: MOV Command,#8Eh ;命令字节为8E MOV ByteCnt,#1 ;单字节传送模式 MOV R0,#XmtDat 数据地址覆给R0 MOV XmtDat,#80h 数据内容为80h 禁止写入 ACALL Send_Byte 调用写入数据子程序 RET 返回调用本子程序处 以上程序调用了基本数据发送(Send_Byte)模块及一些内存单元定义, 其源程序清单在附录中给出下面 的程序亦使用了这个模块 2 时钟停止位操作 当把秒寄存器的第7 位时钟停止位设置为0 时起动时钟开始 Osc_Enable: MOV Command,#80h ; 命令字节为80 MOV ByteCnt,#1 ; 单字节传送模式 MOV R0,#XmtDat 数据地址覆给R0 MOV XmtDat,#00h 数据内容为0 振荡器工作允许 ACALL Send_Byte 调用写入数据子程序 RET 返回调用本子程序处 当把秒寄存器的第7 位时钟停止位设置为1 时,时钟振荡器停止DS1320 进入低功耗方式 Osc_Disable: MOV Command,#80h ;命令字节为80 MOV ByteCnt,#1 ;单字节传送模式 MOV R0,#XmtDat 数据地址覆给R0 MOV XmtDat,#80h 数据内容为80h 振荡器停止 ACALL Send_Byte 调用写入数据子程序 RET 返回调用本子程序处 3. 多字节传送方式
dsl302时钟程序详解经典 dsl302时钟程序详解 DS1302的控制字如图2所示。控制字节的最高有效位(位7)必须是逻辑1,如果它为0,则不能把数据写入DS1302中,位6如果为0,则表示存取日历时钟数据,为1表示存取RAM数据;位5至位1指示操作单元的地址;最低有效位(位0)如为0表示要进行写操作,为1表示进行读操作,控制字节总是从最低位开始 2.3数据输入输出(I/O) 在控制指令字输入后的下一个SCLK时钟的上升沿时,数据被写入DS1302,数据输入从低位即位0开始。同样,在紧跟8位的控制指令字后的下一个SCLK脉冲的下降沿读出DS1302的数据,读出数据时从低位0 位到高位7o 2.4 DS1302的寄存器 DS1302有12个寄存器,其中有7个寄存器与日历、时钟相关,存放的数据位 为BCD码形式,其日历、 时间寄存器及其控制字见表1。
? I日历?別间襦存祁及凡担制孑 fir* 野擅"itwtr 収他总cn - T ?fsy网 移 e S』3 2 1 0 林斶 son8!ll00-59 f.H IUSVX SIX X2H S3II oum(1Mh、 MH K4H851101 \2A12 24? 10 IIH HK MhH M7II01 -2S.2V, W-Jl ?o imiAre 8SH WII03 - !2(11) 0 IUM MOYI1I AAII8HH ni(i II ? 0 0h\V 8LH Mill OQ ? 9910YLAH 此外,DS1302还有年份寄存器、控制寄存器、充电寄存器、时钟突发寄存器 及与RAM相关的寄存器等。时钟突发寄存器可一次性顺序读写除充电寄存器外的所有寄存器内容。DS1302与RAM相关的寄存器分为两类:一类是单个RAM单元,共31个,每个单元组态为一个8位的字节,其命令控制字为COH, FDH,其中奇数为读操作,偶数为写操作;另一类为突发方式下的RAM寄存器,此方式下可一次性读写所有的RAM的31个字节,命令控制字为FEH(写)、FFH(读)。 dsl302程序流程图
例程说明文档
目录 1. 功能概述 (1) 2. 工程实例 (1) 3. 操作步骤 (1) 3.1 定义设备 (1) 3.2 定义变量 (1) 3.3 制作画面 (2) 3.4 进入运行系统 (10) 4. 注意事项 (14)
1. 功能概述 常规需求:很多工业现场会存储数据并对存储的历史数据进行查询、打印输出。 历史数据查询一般为起始时间、结束时间、间隔时间都不固定,最终用户根据实际需要进行查询。 组态王中的实现方法: 利用组态王内置报表以及报表的函数来实现对历史数据的查询。 组态王内置报表的操作类似excel,操作简单、方便,并且组态王提供了大量的报表函数来实现各种复杂功能。 2. 工程实例 我们举一个例子来说明实现方法。在此例程中我们定义五个变量,分别为“压力”、“温度”、“密度”、“电流”、“电压”,运行系统运行后记录历史数据,下面就以此为例来演示完成这一要求的具体步骤。 3. 操作步骤 3.1定义设备 根据工程中实际使用得设备进行定义,本例程使用亚控的仿真PLC设备,使用“PLC -亚控-仿真PLC-串口”驱动,定义设备名称为“PLC”。 3.2定义变量 在组态王中定义五个变量:压力(IO实数类型)、温度(IO实数类型)、密度(IO 实数类型)、电压(IO实数类型)、电流(IO实数类型)。 压力变量:最小值0,最大值100,最小原始值0,最大原始值100,连接设备PLC,寄存器INCREA100,数据类型short,读写属性为只读,采集频率1000。记录和安全区选择“数据变化记录”,变化灵敏度选择“0”。 温度变量:最小值0,最大值50,最小原始值0,最大原始值100,连接设备PLC,
以下资料摘自电子发烧友网感谢作者,版权归网站所有,资料仅供参考 ds1302时钟程序详解 DS1302 的控制字如图2所示。控制字节的最高有效位(位7)必须是逻辑1,如果它为0,则不能把数据写入DS1302中,位6如果为0,则表示存取日历时钟数据,为1表示存取RAM数据;位5至位1指示操作单元的地址;最低有效位(位0)如为0表示要进行写操作,为1表示进行读操作,控制字节总是从最低位开始输出。 2.3 数据输入输出(I/O) 在控制指令字输入后的下一个SCLK时钟的上升沿时,数据被写入DS1302,数据输入从低位即位0开始。同样,在紧跟8位的控制指令字后的下一个SCLK脉冲的下降沿读出DS1302的数据,读出数据时从低位0位到高位7。 2.4 DS1302的寄存器 DS1302有12个寄存器,其中有7个寄存器与日历、时钟相关,存放的数据位为BCD码形式,其日历、时间寄存器及其控制字见表1。
此外,DS1302 还有年份寄存器、控制寄存器、充电寄存器、时钟突发寄存器及与RAM相关的寄存器等。时钟突发寄存器可一次性顺序读写除充电寄存器外的所有寄存器内容。DS1302与RAM相关的寄存器分为两类:一类是单个RAM单元,共31个,每个单元组态为一个8位的字节,其命令控制字为C0H~FDH,其中奇数为读操作,偶数为写操作;另一类为突发方式下的RAM寄存器,此方式下可一次性读写所有的RAM的31个字节,命令控制字为FEH(写)、FFH(读)。 ds1302程序流程图
3.2 DS1302实时时间流程 图4示出DS1302的实时时间流程。根据此流程框图,不难采集实时时间。下面结合流程图对DS1302的基本操作进行编程:
软件(结构)设计说明(SDD) XXXX公司
文件更改记录
文件版本变更记录
软件(结构)设计说明(SDD) 说明: 1.《软件(结构)设计说明》(SDD)描述了计算机软件配置项(CSCI的设计。它描述了CSCI级设计决策、CSCI体系结构设计(概要设计)和实现该软件所需的详细设计。SDD可用接口设计说明IDD和数据库(顶层)设计说明DBDD加以补充。 2.SDD连同相关的IDD和DBDD是实现该软件的基础。向需方提供了设计的可视性,为软件支持提供了所需要的信息。 3.IDD和DBDD是否单独成册抑或与SDD合为一份资料视情况繁简而定。 模版说明: 1、文档字体设定: 标题1:小一 标题2:二号 标题3:小二 标题4:三号 标题5:小三 标题6:四号 正文:四号 2、文章编号,请使用格式刷刷,不要手工编号。目前格式都 是对的。 3、内容根据实际情况裁剪,一般可行性研究报告,模版章节 不可缺。 4、封面图片请根据实际情况自行替换。 5、关于修订记录,请根据文档需要自行添加。
1.引言 本章应分为以下几条。 1.1.标识 本条应包含本文档适用的系统和软件的完整标识。(若适用)包括标识号、标题、缩略词语、版本号、发行号。 1.2.系统概述 本条应简述本文档适用的系统和软件的用途。它应描述系统与软件的一般性质;概述系统开发、运行和维护的历史;标识项目的投资方、需方、用户、开发方和支持机构;标识当前和计划的运行现场;并列出其他有关文档。 1.3.文档概述 本条应概述本文档的用途与内容,并描述与其使用有关的保密性或私密性要求。 1.4.基线 说明编写本系统设计说明书所依据的设计基线。
51 单片机ds1302 时钟芯片 #define uint unsigned int #define uchar unsigned char sbit lcdrs = P1^0; sbit lcdrw = P1^1; sbit lcden = P1^2; sbit key0 = P2^0;//功能键,选择时分秒 sbit key1 = P2^1;//加1键 sbit key2 = P2^2;//减1键 sbit key4 = P2^4; sbit clk_1302 = P1^5; //1302芯片位定义sbit io_1302 = P1^6; sbit rst_1302 = P1^7; uchar bdata dat; sbit dat0 = dat^0; sbit dat7 = dat^7; uchar key0_count;//按键0被按的次数(0~3) uchar flag; char hour,minute,second; uchar table_date[] = "2009-4-12 Mon"; uchar table_time[] = "00:00:00"; /****** 函数申明********/ void write_cmd_1602(uchar cmd); void write_data_1602(uchar dat); void write_add(uchar add,uchar dat); void init1602(); void delay(uint z); uchar reverse(uchar c); void keyscan(); void init(); void RTC_initial (); void wr_1302(uchar wr_data); uchar rd_1302(void); uchar uc_R1302(uchar ucAddr); void v_W1302(uchar ucAddr, uchar ucDa); 主程序 #include
代码编写规范说明书(c#.net与https://www.doczj.com/doc/dd12889446.html,)目录 1 目的 2 范围 3 注释规范 3.1 概述 3.2 自建代码文件注释 3.3 模块(类)注释 3.4 类属性注释 3.5 方法注释 3.6 代码间注释 4 命名总体规则 5 命名规范 5.1 变量(Variable)命名 5.2 常量命名 5.3 类(Class)命名 5.4 接口(Interface)命名 5.5 方法(Method)命名 5.6 名称空间Namespace)命名 6 编码规则 6.1 错误检查规则 6.2 大括号规则 6.3 缩进规则 6.4 小括号规则 6.5 If Then Else规则 6.6 比较规则 6.7 Case规则 6.8 对齐规则 6.9 单语句规则 6.10 单一功能规则 6.11 简单功能规则 6.12 明确条件规则 6.13 选用FALSE规则 6.14 独立赋值规则 6.15 定义常量规则 6.16 模块化规则 6.17 交流规则 7 编程准则 7.1 变量使用 7.2 数据库操作 7.3 对象使用 7.4 模块设计原则 7.5 结构化要求 7.6 函数返回值原则 8 代码包规范 8.1 代码包的版本号
8.2 代码包的标识 9 代码的控制 9.1 代码库/目录的建立 9.2 代码归档 10 输入控制校验规则 10.1 登陆控制 10.2 数据录入控制 附件1:数据类型缩写表 附件2:服务器控件名缩写表 1 目的 一.为了统一公司软件开发设计过程的编程规范 二.使网站开发人员能很方便的理解每个目录,变量,控件,类,方法的意义 三.为了保证编写出的程序都符合相同的规范,保证一致性、统一性而建立的程序编码规范。 四.编码规范和约定必须能明显改善代码可读性,并有助于代码管理、分类范围适用于企业所有基于.NET平台的软件开发工作 2 范围 本规范适用于开发组全体人员,作用于软件项目开发的代码编写阶段和后期维护阶段。 3 注释规范 3.1 概述 a) 注释要求英文及英文的标点符号。 b) 注释中,应标明对象的完整的名称及其用途,但应避免对代码过于详细的描述。 c) 每行注释的最大长度为100个字符。 d) 将注释与注释分隔符用一个空格分开。 e) 不允许给注释加外框。 f) 编码的同时书写注释。 g) 重要变量必须有注释。 h) 变量注释和变量在同一行,所有注释必须对齐,与变量分开至少四个“空格”键。 如:int m_iLevel,m_iCount; // m_iLevel ....tree level // m_iCount ....count of tree items string m_strSql; //SQL i) 典型算法必须有注释。 j) 在循环和逻辑分支地方的上行必须就近书写注释。 k) 程序段或语句的注释在程序段或语句的上一行 l) 在代码交付之前,必须删掉临时的或无关的注释。 m) 为便于阅读代码,每行代码的长度应少于100个字符。 3.2 自建代码文件注释 对于自己创建的代码文件(如函数、脚本),在文件开头,一般编写如下注释: /****************************************************** FileName: Copyright (c) 2004-xxxx *********公司技术开发部 Writer: create Date: Rewriter:
报警系统应用例程 说明文档 此文档由北京亚控公司提供,仅作为KingSCADA3.0报警系统应用的使用参考,其中涉及内容的详细说明请参考KingSCADA3.0的使用说明或咨询技术支持工程师。
目录 1. 概述 (1) 2. 例程 (1) 2.1 定义变量的报警属性 (1) 2.2 报警配置 (3) 2.3 报警显示 (6) 2.4 报警查询 (12) 2.5 报警窗的方法应用 (17) 3. 注意事项 (18)
1.概述 在工业控制系统中,当现场的数据超出正常范围时,系统应以报警的方式将其通知相关工作人员,工作人员接收到报警信息后会对报警做出相应的处理,所以报警系统在工业控制系统中是一个非常重要的组成部分。KingSCADA3.0提供了强大的报警操作功能:包括报警存储功能、报警打印功能、报警显示功能、报警转发功能等等,下面将具体介绍每种功能的操作过程。 2.例程 2.1定义变量的报警属性 在使用报警功能前,必须先要对变量的报警属性进行定义。 在开发系统“数据词典”中新建变量,本工程中我们以模拟量为例。 ●变量名:temperature ●变量类型:基本变量 ●数据类型:Mem Float ●变量描述:温度 ●初始值:0 ●灵敏度:0 ●最小值:0 ●最大值:100 变量temperature的报警属性如图1所示。
图1 变量temperatrue报警属性 ●变量名:pressure ●变量类型:基本变量 ●数据类型:Mem Float ●变量描述:压力 ●初始值:0 ●灵敏度:0 ●最小值:0 ●最大值:5 变量pressure的报警属性如图2所示。
例程说明文档 北京亚控科技发展××公司 2019年7月
目录 1. 功能概述 (1) 2. 工程实例 (1) 3. 操作步骤 (1) 3.1 新建工程 (1) 3.2 报警配置 (7) 3.3 进入运行系统 (14) 3.4 历史报警查询 (15) 4. 注意事项 (25)
1. 功能概述 常规需求:很多工业现场要求将变量的报警信息进行存储,并且可以灵活的进行历史报警的查询、打印。 组态王中的实现方法:组态王支持通过ODBC接口将数据存储到关系数据库中,并且提供KVADODBGrid控件对存储的历史报警信息进行条件查询,并可以对查询结果进行打印。关系数据库可以为Access数据库或者SQLServer数据库。 2. 工程实例 我们通过一个简单的工程对报警信息的存储以及历史报警信息的查询进行讲解。历史报警的查询主要根据日期、报警组为条件进行查询。报警信息存储的数据库以Access 数据库为例进行。下面就以此为例来演示完成这一现场需求的设置步骤。 3. 操作步骤 3.1新建工程 3.1.1定义设备 新建一个工程,在设备处新建设备,我们在本例中定义一个仿真PLC的设备,设备列表为“PLC-亚控-仿真PLC-串口”,设备名称为“PLC1”。此仿真PLC可以做为虚拟设备与组态王进行通讯。仿真PLC主要有如下的寄存器:自动加1寄存器INCREA,自动减1寄存器DECREA,随机寄存器RADOM,常量寄存器STATIC,常量字符串寄存器STRING,CommErr寄存器。具体的寄存器的使用请参考组态王IO驱动帮助。 3.1.2定义变量 在数据词典中新建两个IO变量,变量名称分别为压力、流量,变量类型为IO实数,连接的设备为前面定义的仿真PLC设备“PLC1”,寄存器分别为INCREA100,DECREA100,数据类型为short,读写属性为“只读”。这样压力变量就会从0开始自动加1,其变化范围是0到100,流量变量从100开始自动减1,其变化范围是0到100。变量定义画面如下图一、图二所示:
#include
智能建筑设备管理系统(IBMS)集成平台 用户需求说明书 深圳市贝尔信智能系统有限公司
修订历史记录 A- 增加M- 修订D-
目录 1引言4 1.1编写目的 (4) 1.2范围 (4) 1.3术语与缩写解释 (5) 1.4参考资料 (5) 1.5假设与约定 (6) 1.6先进性与可扩展性 (6) 2产品介绍 (8) 3产品面向的用户群体 (9) 10 11 11 11 12 12 12 13 13 13 14 14 14 14 14 14 14 14 14 15 16 16 16 7.3网络环境需求 (18) 8需求签字确认 (19)
1引言 1.1编写目的 编写本需求说明书的目的是为了更好的建立起设计者与用户的联系,明确用户需要什么,对每一项功能的实现有什么要求。并准确的定义“系统必 2.2安全防范 视频监控系统 入侵报警系统 2.3公共类 停车场管理系统 机房监控系统
1.3术语与缩写解释 7.《民用闭路监视系统工程技术规范》(GB50198-2011) 8.《防盗报警控制器通用技术条件》(GB 12663-2001) 9.《建筑设计防火规范》(GB50016-2006) 10.《火灾自动报警系统设计规范》(GB50116-98) 11.《绿色建筑评价标准》(GB/T50378-2006) 12.《安全防范工程技术规范》(GB50348-2004)
13.《入侵报警系统工程设计规范》(GB50394-2007) 14.《视频安防监控系统工程设计规范》(GB50395-2007) 15.《出入口控制系统工程设计规范》(GB50396-2007) 16.《商业建筑物综合布线系统国际标准》(ISO/IEC11801) 17.《通信布线管道和空间设计施工标准》(EIA/TIA 569) 18.《综合布线系统工程设计规范》(GB50311-2007) 19.《综合布线系统工程验收规范》(GB50312-2007) 1.6先进性与可扩展性 本系统有很强的前瞻性设计,充分预留了各种标准协议的支持接口, 可根据具体项目进行订制: ●本系统支持BACnet 楼宇自动化和控制网络协议。 ●本系统支持OPC / ModBus 作为公共的标准接口采集协议。
金龙开发板网络例程说明文档 硬件平台:金龙207开发板、金龙407开发板 软件平台: 固件库版本:1.0 Freertos版本:6.1.0 Lwip版本:1.3.2 深圳旺宝电子
实验一:Ping 对于网络通信首先必须得保证网络连接正常,Ping命令是我们最常使用的检测网络的方法,将开发板与电脑用网线连接,首先我们需要对电脑进行如下配置,打开电脑网络,双击“本地连接” 设置本地连接“属性”
设置TCP/IP属性 选择手动设置IP地址,这里设置为192.168.1.203,点击确定即可。
打开工程“金龙207网络之ping”。 打开main.h我们可以看出开发板IP地址为192.168.1.199,开发板IP地址与电脑IP地址必须在一个网段内(这里是192.168.1.xxx),如果不需要使用LCD显示(使用旺宝电子3.2寸触摸屏模块),可关掉宏“USE_LCD”。STM32与DP83848采用的是RMII接口,STM32为DP83848提供50MHz时钟,使用宏“RMII_MODE”。 如下图为金龙207开发板照片,若网络灯不亮,请检查J8跳线帽是否连接(如下标注,需连接上),可用示波器测试此处波形频率为50MHz正弦波。
JLINK下载运行后,使用交叉网线将电脑与开发板连接,点击开始->运行输入cmd出现命令提示符界面,输入ping192.168.1.199,如下图,可以看到Reply from192.168.1.199: bytes=32time<1ms TTL=255则说明开发板与电脑连接正常。LCD显示板卡IP地址,若不需要LCD显示可在main.h中将USE_LCD宏关掉。
很简单的一个小程序,理解了MPI中的几个基本函数。 以及环境的使用方法。 #include
盘点程序说明书 欢迎使用轻睿科技开发的网络版固定资产盘点程序 一功能概述: 1:条码扫描,二维码扫描,可扫描手机WIFI二维码,读取对方手机WiFi密码。(设置-无线和网络-WLAN-点击列表-扫描二维码) 2:进行条码扫描录入数据,保存到服务器实现数据共享,固定资产盘点功能。 3:语音识别,支持多国语音翻译功能,可语音朗读中英文。 4:隐藏的语音识别功能:(设定,设置,信息,联系人,手电筒,关,闪光灯开,闪光灯关,退出,网络数据,通讯录,时钟,闹钟,QQ,微信,现在几点,几点了,几点啦,相册,救命,着火啦,着火了,起火了,119,110,120,救护车,录音,指南针,计算器,返回,桌面,跑步,跑了多少步,锻炼,记事本,备忘录,音乐,删除资产,天气),点击讯飞语音识别按钮后,可语音唤醒以上功能。 5.多功能计算器,可累积多段分别计算。 6.计步器功能(语音唤醒) 7.报时功能(语音唤醒) 8.高度,速度计,指南针 9.应用程序可手动跟新,下载后存储于手机存储卡根目录fabuban_pandianruanjian.zip,可通过浏览器或者压缩文件管理器打开进行安装。 二盘点功能的使用方法: 1:软件界面
: 2:如何新增资产 第一次使用本软件,数据库内无数据,需要手工建立数据文件,方法: ①点击“扫码”按钮,识别完成后顶部单元格显示条码内容,光标自动转移到中间单元格,请在此单元格内②输入产品型号(例)联想笔记本电脑,PK1353型,人力资源部,张三,重庆市惠普科技有限公司万州观音岩173号,输入完毕,③点击“新增资产”按钮。 此时弹出对话框:确定新增资产吗?请点击确定按钮。
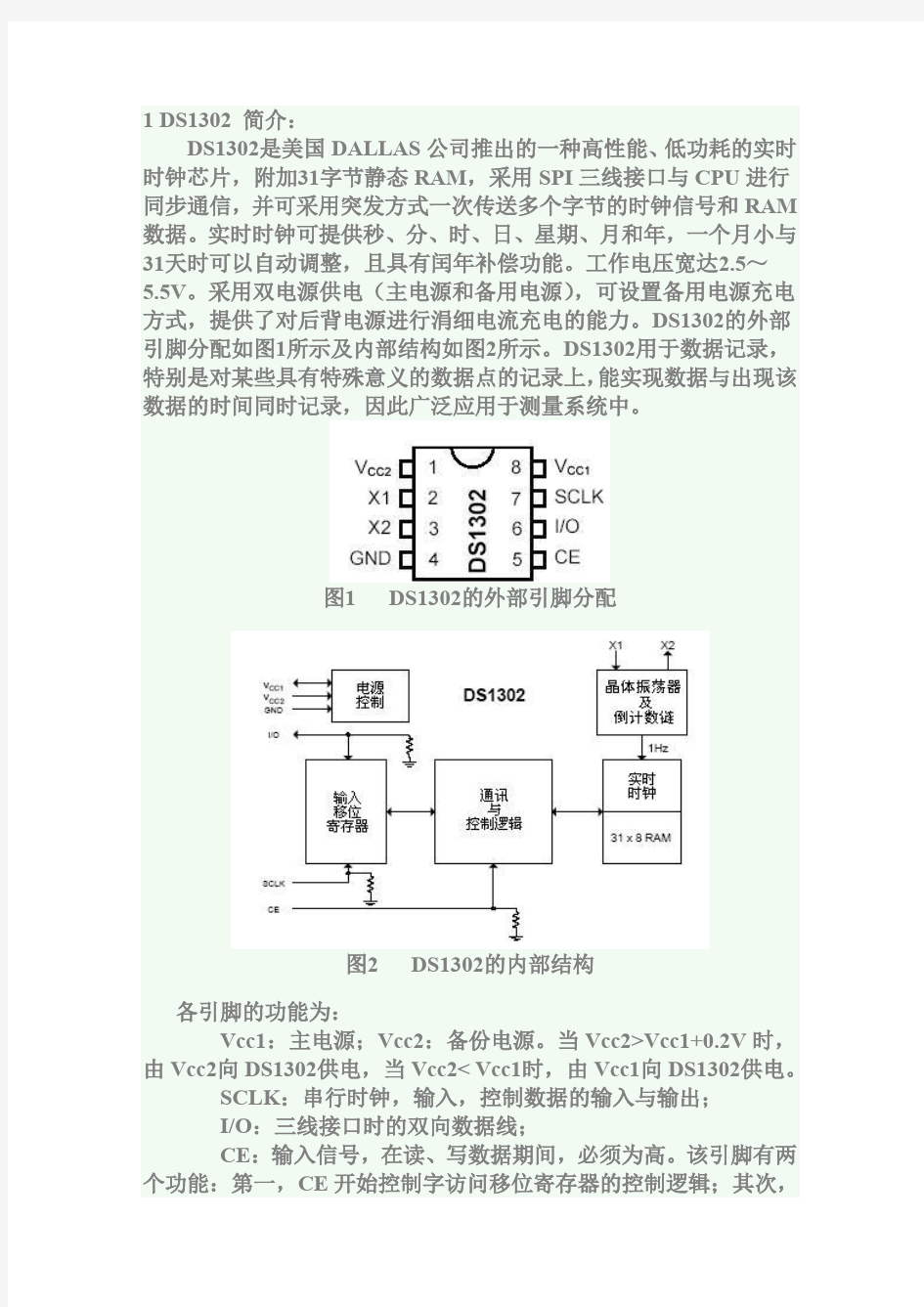
早就已经不在学校了,可是前几天突然有老童学问我有没有保存这方面的资料,赶紧翻了一下我的电脑,呵呵,还是找到了一些资料,顺便共享出来,有需要的同学们拿走后留个言吧——可以的话。最后感谢无名的原作者。 DS1302的特点 DS1302是美国DALLAS公司推出的一种高性能、低功耗的实时时钟芯片,附加31字节静态RAM,采用SPI三线接口与CPU进行同步通信,并可采用突发方式一次传送多个字节的时钟信号和RAM数据。实时时钟可提供秒、分、时、日、星期、月和年,一个月小与31天时可以自动调整,且具有闰年补偿功能。工作电压宽达2.5~5.5V。采用双电源供电(主电源和备用电源),可设置备用电源充电方式,提供了对后背电源进行涓细电流充电的能力。DS1302的外部引脚分配如图1所示。DS1302用于数据记录,特别是对某些具有特殊意义的数据点的记录上,能实现数据与出现该数据的时间同时记录,因此广泛应用于测量系统中。 各引脚的功能 Vcc1:主电源;Vcc2:备份电源。当Vcc2>Vcc1+0.2V时,由Vcc2向DS1302供电,当Vcc2< Vcc1时,由Vcc1向DS1302供电。SCLK:串行时钟,输入;I/O:三线接口时的双向数据线;CE:输入信号,在读、写数据期间,必须为高。该引脚有两个功能:第一,CE开始控制字访问移位寄存器的控制逻辑;其次,CE提供结束单字节或多字节数据传输的方法。 DS1302的几组寄存器以及有关RAM的地址
(1)DS1302有关日历、时间的寄存器 DS1302有关日历、时间的寄存器共有12个,其中有7个寄存器(读时81h~8Dh,写时80h~8Ch),存放的数据格式为BCD码形式,如图3所示。 (2)小时寄存器(85h、84h)的位7用于定义DS1302是运行于12小时模式还是24小时模式。当为高时,选择12小时模式。在12小时模式时,位5是,当为1时,表示PM。在24小时模式时、位5是第二个10小时位。 (3)秒寄存器(81h、80h)的位7定义为时钟暂停标志(CH)。当该位置为1时,时钟振荡器止,DS1302处于低功耗状态;当该位置为0时,时钟开始运行。(4)控制寄存器(8Fh、8Eh)的位7是写保护位(WP),其它7位均置为0。在任何的对时钟和RAM的写操作之前,WP位必须为0。当WP位为1时,写保护位防止对任一寄存器的写操作。 (5)DS1302中附加31字节静态RAM的地址如图4所示。 (6)DS1302的工作模式寄存器 所谓突发模式是指一次传送多个字节的时钟信号和RAM数据。突发模式寄存器如图5所示