电压空间矢量
电气空间矢量PWM 自动1202 熊立波 20121799 什么是电气空间矢量PWM ,以及怎样用于变频器V/F 控制? 空间矢量的定义:交流电动机绕组的电压、电流、磁链等物理量都是随时间变化的,分析时常用时间向量来表示,但如果考虑到他们所在的空间位置,也可以定义为空间矢量。 在图中,A ,B ,C 分别表示在空间静止的电动机定子三相绕组的轴线,它们在空间互差 120,三相定子正弦波相电压0A U 、0B U 、 C U 分别加在三相绕组上。可以定义三个定子 电压空间矢量0A u 、0B u 、0C u ,使它们的方向始终处于各相绕组的轴线上,而大小则随时 间按正弦规律波动,时间相位互相错开的角度也是0 120。 0s A B C u u u u =++ 当定子相电压为三相平衡正弦电压时,三相合成矢量 0s A B C u u u u =++ 1 1 2111224[cos()cos()cos()]333 23 j j m m m j t j t m s t t t U U e U e U e U e γγππωωωωω= +-+-== 合成空间矢量表示的定子电压方程式 s s s s d dt u i R ψ =+ 忽略定子电阻压降,定子合成电压与合成磁链空间矢量的近似关系为
s d dt ψ 或 s s dt u ψ ≈? 三相逆变电路每相上下桥臂开关动作相反,将上桥臂导通而下桥臂关断的状态记为1,反之记为0,则三相逆变电路共对应8种输出电压状态。 PWM 逆变器共有8种工作状态 当 (A S B S C S )=(1 0 0) (A u B u C u )=(2d U 2d U - 2d U -) 242331 22(1)(1) 32 32j j j j d d U U u e e e e ππ γγ = --=-- 224242 [(1cos cos )(sin sin )]323333 3d d j U U ππππ = ---+= 当 (A S B S C S )=(1 1 0) (A u B u C u )=(2d U 2d U 2d U - ) 2423 322(1)(1) 322j j j j d d U U u e e e e ππ γγ=+-=+- 22424[(1cos cos )(sin sin )]323333d j U ππππ = +-+- 322(13)323j d d j U U e π= += 依次类推,可得8个基本空间矢量。 6个有效工作矢量 1 u ~6 u
近年来,电机的空间矢量理论被引入到逆变器及其控制中,形成和发展了空间矢量 PWM(SVPWM)控制思想。其原理就是利用逆变器各桥臂开关控制信号的不同组合,使逆变器输出电压空间矢量的运行轨迹尽可能接近圆形。空间矢量脉宽调制技术,不仅使电机脉动降低,电流波形畸变减小,且与常规正弦脉宽调制(SP-WM)技术相比,直流电压利用率有很大提高,并更易于数字化实现。 1 电压空间矢量调制(SVPWM)算法 SVPWM是以磁链跟踪控制为目标,使逆变器瞬时输出三相脉冲电压合成的空间电压矢量与期望输出三相正弦波电压合成的空间电压矢量相等。对于三相电压型逆变器而言,它有8种工作状态,用矢量表示这8种空间状态,如图1所示。 介绍SVPWM工作原理的相关文献很多,这里不再细述,以下给出算法步骤: (1)判断参考电压矢量Vref所在扇区 引入三个中间变量A,B,C:
则扇区号:S=A+2B+4C。 (2)计算扇区的有效电压空间矢量和零矢量的作用时间Tx,Ty和T0 引入三个中间变量X,Y和Z: 对于不同的扇区,Tx,Ty按表1取值。 饱和判断:Tyout。
计算零电压矢量作用时间:T0=TPWM-Tx-Ty。 (3)开关切换时间分配 先定义空间矢量切换点分别为: 则根据空间矢量所处的扇区不同,晶体管的切换时间Tcm1,Tcm2,Tcm3分别如表2所示。
Simulink仿真环境下可以方便地利用模块和软件编程扩展进行仿真。根据上述实现方法,构造了如图2所示的Simulink仿真模型。
在模型中使用Repeating Sequence模块作为双向定时计数器,与SVPWM调制波进行比较,其输出作为滞环比较器的输入。Matlab语言编写的S函数则作为比较值的计算与分配单元。 2 仿真与分析 仿真对象:SVPWM与永磁同步电机。通过Matlab仿真得到的波形如图3所示。
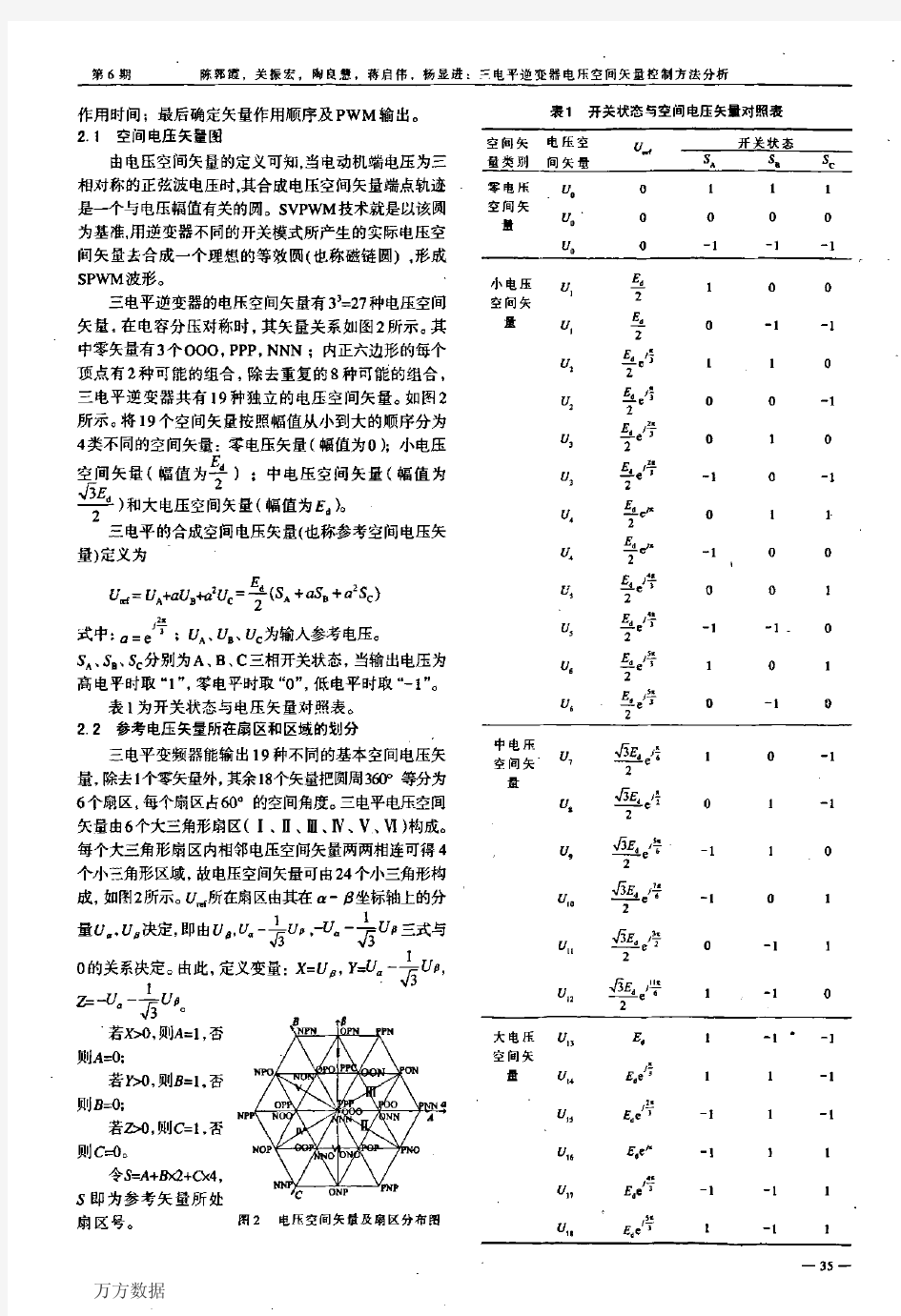
所谓三电平是指逆变器交流侧每相输出电压相对于直流侧有三种取值,正端电压(+Vdc/2)、负端电压(-Vdc/2)、中点零电压(0)。二极管箱位型三电平逆变器主电路结构如图所示。逆变器每一相需要4个IGBT开关管、4个续流二极管、2个箱位二极管;整个三相逆变器直流侧由两个电容C1、C2串联起来来支撑并均衡直流侧电压,C1=C2。通过一定的开关逻辑控制,交流侧产生三种电平的相电压,在输出端合成正弦波。 三电平逆变器的工作原理 以输出电压A相为例,分析三电平逆变器主电路工作原理,并假设器件为理想器件,不计其导通管压降。定义负载电流由逆变器流向电机或其它负载时的方向为正方向。 (l) 当Sa1,、Sa2导通,Sa3、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流从正极点流过主开关Sa1、Sa2,该相输出端电位等同于正极点电位,输出电压U=+V dc/2; 若负载电流为负方向,则电流流过与主开关管Sa1、Sa2反并联的续流二极管对电容C1充电,电流注入正极点,该相输出端电位仍然等同于正极点电位,输出电压U=+V dc/2。通常标识为所谓的“1”状态,如图所示。
“1”状态“0”状态 “-1”状态 (2) 当Sa2、Sa3导通,Sa1、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流 从O点顺序流过箱位二极管D a1,主开关管Sa2:,该相输出端电位等同与0点电位,输出电压U=O;若负载电流为负方向,则电流顺序流过主开关管Sa3和箱位二极管D a2,电流注入O点,该相输出端电位等同于O点电位,输出电压U=0,电源对电容C2充电。即通常标识的“0”状态,如图所示。
电气空间矢量PWM 自动1202 熊立波 20121799 什么是电气空间矢量PWM ,以及怎样用于变频器V/F 控制? 空间矢量的定义:交流电动机绕组的电压、电流、磁链等物理量都是随时间变化的,分析时常用时间向量来表示,但如果考虑到他们所在的空间位置,也可以定义为空间矢量。 在图中,A ,B ,C 分别表示在空间静止的电动机定子三 相绕组的轴线,它们在空间互差0 120 ,三相定子正弦 波相电压0A U 、0B U 、0C U 分别加在三相绕组上。可以定义三个定子电压空间矢量 A u 、 B u 、 0C u ,使 它们的方向始终处于各相绕组的轴线上,而大小则随时间按正弦规律波动,时间相位互相错开的角度也是 120。 0s A B C u u u u =++ 当定子相电压为三相平衡正弦电压时,三相合成矢量 0s A B C u u u u =++ 112111224[cos()cos()cos()]33323 j j m m m j t j t m s t t t U U e U e U e U e γγππωωωωω=+-+-= = 合成空间矢量表示的定子电压方程式 s s s s d dt u i R ψ =+ 忽略定子电阻压降,定子合成电压与合成磁链空间矢量的近似关系为 s d dt ψ 或 s s dt u ψ ≈? 三相逆变电路每相上下桥臂开关动作相反,将上桥臂导通而下桥臂关断的状态记为1,反之 记为0,则三相逆变电路共对应8种输出电压状态。 PWM 逆变器共有8种工作状态 当 (A S B S C S )=(1 0 0) (A u B u C u )=(2d U 2d U - 2d U -)
变频器电压空间矢量脉宽调制(SVPWM)控制时间:2011-10-07 来源:未知编辑:电气自动化技术网点击:1071次字体设置: 大中小 经典的正弦脉宽调制(spwm)控制着眼于使变压变频器的输出电压尽量接近正弦波,并未顾及输出电流的波形如何,更未考虑电动机中产生的旋转磁场。然而交流电动机需要输入三相正弦波的最终目的是在电动机气隙形成圆形的旋转磁场,从而产生恒定的电磁转矩。如果对准这一目标,把逆变器和交流电动机视为一体,按照跟踪圆形旋转磁场来控制逆变器的工作,其效果应该更好。这种控制方法称作“磁链跟踪控制”,下面的讨论将表明,磁链轨迹是交替使用不同的电压空间矢量得到的,所以又称“电压空间矢量pwm(space vector pwm,简称svpwm)控制”。 4.1 电压空间矢量 随时间按正弦规律变化的物理量可在复平面上用时间相量表示,而在空间呈正弦分布的物理量也可在复平面上表示为一个空间矢量。图4-1a)绘出了异步电动机定子三相绕组接线图,图中箭头所指为相应物理量的给定正方向。在空间呈正弦分布的三相定子绕组磁动势可用空间矢量f a、f b、f c表示,见图4-1b),它们分别座落在代表三相定子绕组轴线空间位置的a、b、c轴上,而三相绕组合成磁动势的空间矢量为图中的f s。 f s=f a+f b+f c(4-1) 式中,f a、f b、f c的模均在各自的绕组轴线上按正弦规律作脉动变化,时间相位分别差2π/3。它们的合成磁动势空间矢量f s则绕定子参考坐标系的原点o以同步角频率旋转。当三相定子绕组电流为对称的三相正弦电流时,fs的幅值为常数,是各相磁动势幅值的3/2倍,矢量顶端的运动轨迹是一个圆,即通称的圆形旋转磁场。
收稿日期:2004-02-24 作者简介:陶生桂(1940-),男,江苏常熟人,教授,博士生导师.E 2mail :hb9139@https://www.doczj.com/doc/db9575733.html, 三电平逆变器中点电位平衡 电路的设计与仿真 陶生桂,龚熙国,袁登科 (同济大学沪西校区电气工程系,上海 200331) 摘要:多电平逆变器在中高压大功率场合得到了广泛的研究和应用.二极管中点箝位三电平逆变器是一种简单实用的多电平逆变器,但是三电平逆变器直流侧中点电位偏移问题影响着逆变器及其电机调速系统的可靠性.为此提出了一种用于三电平逆变器中点电位平衡的硬件电路,详细介绍了其工作原理以及参数设定,并用Matlab/ Simulink 仿真工具对系统进行了研究,给出了较好的仿真结果. 关键词:三电平逆变器;中点电位平衡;二极管箝位 中图分类号:TM 464 文献标识码:A 文章编号:0253-374X (2005)03-0395-05 Design and Simulation of Novel Circuit for Neutral 2Point Voltage Balance in Three 2Level Inverter TA O S heng 2gui ,GON G Xi 2guo ,Y UA N Deng 2ke (Department of Electrical Engineering ,Tongji University West Campus ,Shanghai 200331,China ) Abstract :The multilevel inverter has been studied and used widely in high power applications for medium or high voltage.Diode 2clamped three 2level inverter is a simple and practical kind of inverter.But the deviation of neutral point voltage is one of the key aspects that affects the reliability of the three 2level inverter and its electric drive system.This paper presents a novel circuit for neutral 2point voltage balance in the three 2level inverter.The operation principle and parameters setting are analyzed in detail.Simulation results based on Matlab/Simulink are supplied to confirm the validity of the pro 2posed circuit. Key words :three 2level inverter ;neutral 2point voltage balancing ;diode 2clamped 近几年来,多电平逆变器成为人们研究的热点课题.三电平逆变器是多电平逆变器中最简单又最实用的一种电路.三电平逆变器与传统的两电平逆变器相比较,主要优点是:器件具有2倍的正向阻断电压能力,并能减少谐波和降低开关频率,从而使系统损耗减小,使低压开关器件可以应用于高压变换器中[1].但是三电平逆变器控制策略复杂,并要考 虑中点电位平衡的问题.若逆变器直流母线上串联的2个电容的中点电压出现偏移,将引起三电平逆变器输出电压波形发生畸变而增大谐波及损耗[2].抑制三电平逆变器中点电位偏移的方法有硬件和软件两类.从软件出发将会增加控制的复杂性.笔者提出了一种抑制三电平逆变器中点电位偏移的硬件电路的实现方法.详细介绍了其工作原理和电路设计, 第33卷第3期2005年3月 同济大学学报(自然科学版) JOURNAL OF TON G J I UN IVERSITY (NATURAL SCIENCE )Vol.33No.3 Mar.2005
三电平逆变器的主电路结构及其工作原理 所谓三电平是指逆变器交流侧每相输出电压相对于直流侧有三种取值,正端电压(+Vdc/2)、负端电压(-Vdc/2)、中点零电压(0)。二极管箱位型三电平逆变器主电路结构如图所示。逆变器每一相需要4个IGBT开关管、4个续流二极管、2个箱位二极管;整个三相逆变器直流侧由两个电容C1、C2串联起来来支撑并均衡直流侧电压,C1=C2。通过一定的开关逻辑控制,交流侧产生三种电平的相电压,在输出端合成正弦波。 三电平逆变器的工作原理 以输出电压A相为例,分析三电平逆变器主电路工作原理,并假设器件为理想器件,不计其导通管压降。定义负载电流由逆变器流向电机或其它负载时的方向为正方向。 (l) 当Sa1,、Sa2导通,Sa3、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流从正极点流过主开关Sa1、Sa2,该相输出端电位等同于正极点电位,输出电压U=+V dc/2; 若负载电流为负方向,则电流流过与主开关管Sa1、Sa2反并联的续流二极管对电容C1充电,电流注入正极点,该相输出端电位仍然等同于正极点电位,输出电压U=+V dc/2。通常标识为所谓的“1”状态,如图所示。
“1”状态“0”状态 “-1”状态 (2) 当Sa2、Sa3导通,Sa1、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流 从O点顺序流过箱位二极管D a1,主开关管Sa2:,该相输出端电位等同与0点电位,输出电压U=O;若负载电流为负方向,则电流顺序流过主开关管Sa3和箱位二极管D a2,电流注入O点,该相输出端电位等同于O点电位,输出电压U=0,电源对电容C2充电。即通常标识的“0”状态,如图所示。 (3) 当Sa3、Sa4导通,Sa1、Sa2关断时,若负载电流为正方向,则电流从负极点流过与主开 关Sa3、Sa4反并联的续流二极管对电容C2进行充电,该相输出端电位等同于负极点电位,输出电压U=-V dc/2;若负载电流为负方向,则电源对电容C2充电,电流流过主开关管Sa3、Sa4注入负极点,该相输出端电位仍然等同于负极点电位,输出电压U=-V dc/2。通常标识为“-1”状态,如图所示。
电压空间矢量脉宽调制技术的原理与特征分 析 收藏此信息打印该信息添加:袁登科陶生桂龚熙国来源:未知 1 引言 自从1964年德国a.schonung等学者率先提出了脉宽调制变频的思想—把通信系统的脉宽调制(pwm)技术应用于交流电气传动以来,至今已经出现了几十种不同的脉宽调制技术[1] [2]。脉宽调制技术控制的逆变器可以输出比传统方波逆变器性能好得多的电压波形,但它们各自的着眼点不同、各次谐波分量不同、引起电机的谐波损耗不同、对中间回路电压的利用率不同。其中电压空间矢量pwm技术中间直流回路电压的利用率较高、输出波形含有较少的谐波分量、引起的电流、转矩的脉动也较小,同时也非常有利于数字化实现,因此是非常有前途并且应用也非常广泛的一种pwm技术。本文对该脉宽调制技术的数学基础、原理、几何特征以及不同的调制区域进行了详细的分析,有助于加深对该技术的理解和对该技术的改进。 2 电压空间矢量的概念 电压空间矢量的定义式为: 由于公式中出现了虚数单位j,所以上式电压矢量是用复数表示的。可以求得其实部与虚部分别为:
根据其对应关系可以求出,采用电压矢量实部与虚部表示的三相电压为: 上面两式(2)与(3)也是在坐标变换中经常见到的3/2与2/3变换。当使用电压矢量来表示三相电压时,则有: 式中的re{z}表示取复数z的实部。 一般情况下,三相电压均是时间的变量。首先考虑某一时刻t=t0,那么此时电压矢量在空间内就是具有某一确定方向和长度的有向线段。在不同时刻,它就对应着不同方向或长度的有向线段。假定三相电压为正弦交流电,即 此时的电压空间矢量为: 可见此时的电压矢量的幅值是恒定的,与相电压峰值相等,而其幅角随时间线性增长,且速度为相电压电角频率。这即是说电压矢量端点的轨迹在空间内是一个圆。
啊一直以来对SVPWM原理和实现方法困惑颇多,无奈现有资料或是模糊不清,或是错误百出。经查阅众多书籍论文,长期积累总结,去伪存真,总算对其略窥门径。未敢私藏,故公之于众。其中难免有误,请大家指正,谢谢! 此文的讲解是非常清楚,但是还是存在一些错误,本人做了一些修正,为了更好的理解整个推导过程,对部分过程进行分解,并加入加入7段和5段时调制区别。 1 空间电压矢量调制SVPWM 技术 SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。空间电压矢量PWM与传统的正弦PWM不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。SVPWM技术与SPWM相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。下面将对该算法进行详细分析阐述。 1.1 SVPWM基本原理 SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。逆变电路如图2-8 示。设直流母线侧电压为Udc,逆变器输出的三相相电压为UA、UB、UC,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。假设Um为相电压有效值,f为电源频率,则有: (2-27) 其中,,则三相电压空间矢量相加的合成空间矢量U(t)就可以表示为:(2-28) 可见U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um为相电压峰值,且以角频率ω=2πf按逆时针方向匀速旋转的空间矢量,而空间矢量U(t)在三相坐标轴(a,b,c)上的投影就是对称的三相正弦量。 图2-8 逆变电路 由于逆变器三相桥臂共有6个开关管,为了研究各相上下桥臂不同开关组合时逆变器输出的空间电压矢量,特定义开关函数Sx ( x = a、b、c) 为: (2-30) (Sa、Sb、Sc)的全部可能组合共有八个,包括6个非零矢量Ul(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)、和两个零矢量 U0(000)、U7(111),下面以其中一种开关组合为例分析,假设Sx ( x=? a、b、c)= (100),此时 (2-30) 求解上述方程可得:Uan=2Ud /3、UbN=-U d/3、UcN=-Ud /3。同理可计算出其它各种组合下的空间电压矢量,列表如下: 表2-1 开关状态与相电压和线电压的对应关系
毕业设计(论文)开题报告题目:三电平逆变器硬件电路设计与仿真 院(系)电信学院 专业电气工程及其自动化 班级050413 姓名张天东 学号050413124 导师毕雪芹 2009年3 月5 日
毕业设计(论文)开题报告
参考文献 [1] 张杰,邹云屏,张贤,丁凯.二极管箝位式三电平控制策略研究[D].武汉:华中科技大 学,2002. [2] Yo-Han Lee, et al. A Novel PWM Scheme for a Three-Level V oltage Source Inverter with GTO Thyristors[J] IEEE Transactions on Industry Applications, V ol. 32, No.2, March/April. 1996 [3] 刘凤君正弦波逆变器[M]. 北京:科学出版社,2002 [4] 倪红基于SVPWM的中频变频器的研究[D].上海:东华大学,2000.
[5] 王长兵三电平逆变器SVPWM控制算法的研究[D].哈尔滨: 哈尔滨工业大学,2002 [6] 易荣, 吴浩烈.三电平逆变器异步电机空间矢量控制技术与仿真研究[A]. [7] 吴守箴,臧英杰.电气传动的脉宽调制控制技术[M].北京:机械工业出版社,1998 [8] 李夙. 异步电机直接转矩控制技术[M]. 北京:机械工业出版社,1998 [9] 钟彦儒,高永军,曾光采用空间电压矢量PWM方法三电平逆变器研究[J].电力电子技术,2000,1:10-13 [10] Fei Wang, et al. Sine-Triangle versus Space-Vector Modulation for Three-Level PWM V oltage-Source Inverters[J] IEEE Transactions on Industry Application, V ol.38, No.2, March/April. 2002 [11] https://www.doczj.com/doc/db9575733.html,/matlabintro.htm [12] https://www.doczj.com/doc/db9575733.html,/ruanjian/ruanjian000001.html [13] 胡兵三电平逆变器中点控制策略的研究[D].上海:同济大学,2002. [14] 康劲松三电平逆变器交流传动系统及其控制策略[D].上海:同济大学,2003.
三相三电平逆变器 空间电压矢量速记法 张庆范 山东大学 二极管中点箝位式NPC(Neutral Point Clamped)三相三电平逆变器,每相桥臂有四个电力电子器件T1、T2、T3、T4,四个续流二极管D1、D2、D3、D4,二个箝位二极管D5、D6。 每相桥臂可以安排三种开关状态,若用S a 、S b 、S c 表示A、B、C三相桥臂的开关状态,则S a 、S b 、S c应是三态开关变量。 用S a 变量表示A相桥臂开关状态。 若T1、T2断,T3、T4通,S a = 0,A接电源负端,V a0、=-V D/2 若T1、T4断,T2、T3通,S a = 0,A接电源0端,V a0、=0 若T3、T4断,T1、T2通,S a = 0,A接电源正端,V a0、=+V D/2 A相桥臂开关S a开关变量状态 a b c a b c 都有三种开关状态0、1、2(或N、O、P,-1、0、1)。 S a = 0、1、2 S b = 0、1、2 S c = 0、1、2
a S b S c)3,每一种开关状态(S a S b S c)都对应一组确定的电压V a0、V b0、 V c0,从而对应一个确定的空间电压矢量V。 对应的27个特定空间电压矢量是V0、V1、…、V26,定义矢量 (S a S b S c)的各个矢量为: V0(000),V1(001),V2(002),V3(010),V4(011),V5(012),V6(020),V7(021) ,V8(022),V9(100),V10(101),V11(102),V12(110),V13(111),V14(112),V15( 120),V16(121),V17(122),V18(200),V19(201),V20(202),V21(210),V22(211 ), V24(220), V25(212),V26(221),V27(222)。 以上用文字叙述的方法记住这27种空间电压矢量,确实是件不 容易的事,不如发明一种新的快速记忆方法——空间电压矢量速记 法。 空间电压矢量速记法 C相3列9行0、1、2 B相9行3列0、1、2 A相9行3列0、1、2。
采用空间矢量脉宽调制(SVPWM )的开环 VVVF 调速系统的综合实训 一、实验目的 1、理解电压空间矢量脉宽调制(SVPWM )控制的基本原理。 2、熟悉MCKV 电机控制系统的CPU 模块、IPM 模块和机组各部分硬件模块,并确认工作正常。 3、了解SVPWM 变频器运行参数和特性。 二、实验内容: 1、熟悉CCS 编程环境,并在CCS 下编译、下载、运行DSP 软件工程。 2、观察并记录定子磁链周期和频率,并分析他们之间的关系。 3、观测并记录启动时电机定子电流和电机速度波形)(t f i v =与)(t f n =; 三、实验预习要求 1、阅读并掌握三相交流异步电机VVVF 调速系统工作原理。 2、了解电压空间矢量脉宽调制(SVPWM )控制的基本原理。 3、阅读本次实验指导书和实验程序,写好实验预习报告。 4、在MATLAB/Simulinlk 环境中搭好仿真模型,结合本程序LEVEL1功能框图,完成电流速度双闭环系统交流异步电机矢量控制仿真。 四、实验原理 当用三相平衡的正弦电压向交流电动机供电时,电动机的定子磁链空间矢量幅值恒定,并以恒速旋转,磁链矢量的运动轨迹形成圆形的空间旋转矢量(磁链圆)。SVPWM 就是着眼于使形成的磁链轨迹跟踪由理想三相平衡正弦波电压源供电时所形成的基准磁链圆,使逆变电路能向交流电动机提供可变频电源,实现交流电动机的变频调速。 现在以实验系统中用的电压源型逆变器为例说明SVPWM 的工作原理。三相逆变器由直流电源和6个开关元件( MOSFET) 组成。图1是电压源型逆变器的示意图。 图1 电压源型逆变器示意图
对于每个桥臂而言,它的上下开关元件不能同时打开,否则会因短路而烧毁元器件。其中A 、B 、C 代表3 个桥臂的开关状态,当上桥臂开关元件为开而下桥臂开关元件为关时定义其状态为1 ,当下桥臂开关元件为开而上桥臂开关元件为关时定义其状态为0。这样A 、 B 、 C 有000 、001 、010 、011 、100 、101 、110 、111共 8种状态。逆变器每种开关状态对应不同的电压矢量,根据相位角不同分别命名为U 0(000)、U 1(100)、U 2(110)、U 3(010)、U 4(011)、U 5(001)、U 6(101)、U 7(111)如图2所示。 图2 基本电压空间矢量 其中U 0(000)和U 7(111)称为零矢量,位于坐标的原点,其他的称为非零矢量,它们幅值相等,相邻的矢量之间相隔60°。如果按照一定顺序选择这六个非零矢量的电压空间矢量进行输出,会形成正六边形的定子磁链,距离要求的圆形磁链还有很大差距,只有选择更多的非零矢量才会使磁链更接近圆形。 SVPWM 的关键在于用8个基本电压空间矢量的不同时间组合来逼近所给定的参考空间电压矢量。在图3中对于给定的输出电压U ,用它所在扇区的一对相邻基本电压x U 和60 x U 来等效。此外当逆变器单独输出零矢量时,电动机的定子磁链矢量是不动的。根据这个特点,可以在载波周期内插入零矢量,调整角频率,从而达到变频目的。 图3 电压空间的线性组合
三电平逆变器的主电路结构 及其工作原理 -标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
三电平逆变器的主电路结构及其工作原理 所谓三电平是指逆变器交流侧每相输出电压相对于直流侧有三种取值,正端电压 (+Vdc/2)、负端电压(-Vdc/2)、中点零电压(0)。二极管箱位型三电平逆变器主电路结构如图所示。逆变器每一相需要4个IGBT开关管、4个续流二极管、2个箱位二极管;整个三相逆变器直流侧由两个电容C1、C2串联起来来支撑并均衡直流侧电压,C1=C2。通过一定的开关逻辑控制,交流侧产生三种电平的相电压,在输出端合成正弦波。 三电平逆变器的工作原理 以输出电压A相为例,分析三电平逆变器主电路工作原理,并假设器件为理想器件,不计其导通管压降。定义负载电流由逆变器流向电机或其它负载时的方向为正方向。 (l) 当Sa1,、Sa2导通,Sa3、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流从正极点流过主开关Sa1、Sa2,该相输出端电位等同于正极点电位,输出电压 U=+V dc/2;若负载电流为负方向,则电流流过与主开关管Sa1、Sa2反并联的续流二极管对电容C1充电,电流注入正极点,该相输出端电位仍然等同于正极点电位,输出电压U=+V dc/2。通常标识为所谓的“1”状态,如图所示。
“1”状态“0”状态 “-1”状态 (2) 当Sa2、Sa3导通,Sa1、Sa4关断时,若负载电流为正方向,则电源对电容C1充电,电流 从O点顺序流过箱位二极管D a1,主开关管Sa2:,该相输出端电位等同与0点电位,输出电压U=O;若负载电流为负方向,则电流顺序流过主开关管Sa3和箱位二极管D a2,电流注入O点,该相输出端电位等同于O点电位,输出电压U=0,电源对电容C2充电。即通常标识的“0”状态,如图所示。 (3) 当Sa3、Sa4导通,Sa1、Sa2关断时,若负载电流为正方向,则电流从负极点流过与主开 关Sa3、Sa4反并联的续流二极管对电容C2进行充电,该相输出端电位等同于负极点电位,输出电压U=-V dc/2;若负载电流为负方向,则电源对电容C2充电,电流流过主开关管Sa3、Sa4注入负极点,该相输出端电位仍然等同于负极点电位,输出电压U=-V dc/2。通常标识为“-1”状态,如图所示。
三维空间矢量原理说明 0 引言 以往有很多关于不同脉宽调制技术的研究,如正弦波PWM 、跟踪型PWM 和空间矢量调制技术等。但这些只局限在αβ二维,而二维调制技术是无法解决三相四线系统中的中线电流问题。随着用户电力技术的发展,应用于三相四线系统中的UPS 和电能质量补偿器将会得到更多的重视。 本文基于中点引出式三桥臂逆变器,提出一种三维空间矢量脉宽调制(3D SVPWM )方法。这种方法不但可以使中点引出式三桥臂逆变器在应用于三相四线系统时能同时补偿三相谐波和中线电流,还具有开关频率低、补偿效果好等优点。 1 三维空间电压矢量的分布 图1所示是一个并联在三相四线系统中的中点引出式三相电压逆变器。 图1所示逆变器其直流侧零线与系统中线相连接。本文所有关于三维空间适量的讨论都将基于这种中点引出式的三桥臂逆变器结构。 图1中,同一桥臂的2个开关的导通与关断是互补的。若用1表示上半桥臂开关导通,-1表示下半桥臂导通,则可定义开关函数为: ?? ?-=下半桥臂导通 上半桥臂导通1 1j S (1) 假定上半桥臂和下半桥臂的直流电压值相等,dc dc2dc1V V V ==, 此时,每个桥臂的输出电压可以表示为: j dc S V =0U (2) 三维αβ0坐标系中的瞬时电压矢量可以利用下式给出的α-β-0变换得到:
????????????????????-- - =???? ??????c b a v v v v v v 212 12 123232 12 1001 32βα (3) 由此,αβ0座标下的瞬时电压矢量可以表示为: ()00312132dc V v n S n S n S ++=ββα α (4) 式中:2/2/c b a S S S S --=α,c b S S S -=β,c b a S S S S ++=0 表1中列出了三维系统中的电压矢量以及经过αβ0变换后在其直角坐标中的参数。 从图2所示的三维视图中可以更清楚地看出电压矢量的分布。其中矢量},,{642V V V 和},,{531V V V 分别处于不同的水平面上,而2个零矢量分别指向零轴的正方向和负方向。图3是三维空间电压矢量在αβ平面上的分布,可以看出它与传统的二维空间电压矢量的分布是一样的。 2 二维和三维电压矢量的比较 二维的αβ变换实际上是对于三维αβ0变换在不考虑零序分量时的一种简化,可以推想二维的电压脉宽调制也是一种对三维调制的简化。根据表1所给的参数和图2、图3, 传统的二维坐标系中的电压矢量分布应该就是三维电压分布的俯
任务2:两电平电压源逆变器空间矢量调制方案 周乐明 学号:S1******* 电气2班 摘要 提出了三相两电平逆变器的空间矢量调制方法,详细讨论了两 电平逆变器的工作原理及空间矢量调制的基本原理,并给出一个具体的仿真实例,通过仿真 ,可以得出实际运行中的电压、电流的波形,而且在文中给出了实例的电路原理图,使得对 于空间矢量调制的原理得以更加清楚的认识。 1. 两电平电压源逆变器空间矢量调制 1.1 结构试图 三相电压型逆变器电路原理图如图2.1所示。定义开关量a ,b ,c 和a ',b ',c '表示6个功率开关管的开关状态。当a ,b 或c 为1时,逆变桥的上桥臂开关管开通,其下桥臂开关管关断(即a ',b '或c '为0);反之,当a ,b 或c 为0时,上桥臂开关管关断而下桥臂开关管开通(即a ',b '或c '为1)。由于同一桥臂上下开关管不能同时导通,则上述的逆变器三路逆变桥的组态一共有8种。对于不同的开关状态组合(abc ),可以得到8个基本电压空间矢量。各矢量为: 22j j dc 33out 2()3 U U a be ce ππ-=++ (2-1) 则相电压V an 、V bn 、V cn ,线电压V ab 、V bc 、V ca 以及out ()U abc 的值如下表2-1所示(其中U dc 为直流母线电压)。 a c' b' a'b c U dc A B C N Z 图2.1 三相电压型逆变器原理图 表2-1 开关组态与电压的关系 a b c V an V bn V cn V ab V bc V ca out U 0 0 0 0 0 0 0 0 0 0 1 2U dc /3 -U dc /3 -U dc /3 U dc -U dc dc 23 U
SVPWM 空间矢量脉宽调制(Space Vector Pulse Width Modulation) SVPWM的主要思想是:以三相对称正弦波电压供电时三相对称电动机定子理想磁链圆为参考标准,以三相逆变器不同开关模式作适当的切换,从而形成PWM波,以所形成的实际磁链矢量来追踪其准确磁链圆。传统的SPWM方法从电源的角度出发,以生成一个可调频调压的正弦波电源,而SVPWM方法将逆变系统和异步电机看作一个整体来考虑,模型比较简单,也便于微处理器的实时控制。 普通的三相全桥是由六个开关器件构成的三个半桥。这六个开关器件组合起来(同一个桥臂的上下半桥的信号相反)共有8种安全的开关状态. 其中000、111(这里是表示三个上桥臂的开关状态)这两种开关状态在电机驱动中都不会产生有效的电流。因此称其为零矢量。另外6种开关状态分别是六个有效矢量。它们将360度的电压空间分为60度一个扇区,共六个扇区,利用这六个基本有效矢量和两个零量,可以合成360度内的任何矢量。 当要合成某一矢量时先将这一矢量分解到离它最近的两个基本矢量,而后用这两个基本矢量矢量去表示,而每个基本矢量的作用大小就利用作用时间长短去代表。用电压矢量按照不同的时间比例去合成所需要的电压矢量。从而保证生成电压波形近似于正弦波。 在变频电机驱动时,矢量方向是连续变化的,因此我们需要不断的计算矢量作用时间。为了计算机处理的方便,在合成时一般是定时去计算(如每0.1ms计算一次)。这样我们只要算出在0.1ms内两个基本矢量作用的时间就可以了。由于计算出的两个时间的总合可能并不是0.1ms(比这小),而那剩下的时间就按情况插入合适零矢量。由于在这样的处量时,合成的驱动波形和PWM很类似。因此我们还叫它PWM,又因这种PWM是基于电压空间矢量去合成的,所以就叫它SVPWM了。 需要明白的是,SVPWM本身的产生原理与PWM没有任何关系,只是像罢了。SVPWM的合成原理是个很重要的东东,它并不只用在SVPWM,在其它一些应用中也很有用的。当你见到时就明白了。具体可以参看IEEE的很多论文。 当然,SVPWM与SPWM的原理和来源有很大不同,但是他们确实殊途同归的。SPWM由三角波与正弦波调制而成,而SVPWM却可以看作由三角波与有一定三次谐波含量的正弦基波调制而成,这点可以从数学上证明。 SVPWM特点: 1.在每个小区间虽有多次开关切换,但每次开关切换只涉及一个器件,所以开关损耗小。 2.利用电压空间矢量直接生成三相PWM波,计算简单。 3.逆变器输出线电压基波最大值为直流侧电压,比一般的SPWM逆变器输出电压高15%
摘要 三相三电平逆变器具有输出电压谐波小,/ dv dt小,EMI小等优点,是高压大功率逆变器应用领域的研究热点,三相二极管中点箝位型三电平逆变器是三相三电平逆变器的一种主要拓扑,已经得到了广泛的应用。三相T型三电平逆变器,是基于三相二极管中点箝位型三电平逆变器的一种改进拓扑。这种逆变器中,每个桥臂通过反向串联的开关管实现中点箝位功能,是逆变器输出电压有三种电平。该拓扑比三相二极管中点箝位型三电平拓扑结构每相减少了两个箝位二极管,可以降低损耗并且减少逆变器体积,是一种很有发展前景的拓扑。 本设计采用正弦脉宽调制(SPWM),本文介绍了三相T型三电平逆变器的设计,介绍其结构和基本工作原理,及SPWM控制法的原理,并利用SPWM控制的方法对三电平逆变器进行设计与仿真。本设计采用SIMULINK对T型三电平逆变电路建立模型,并进行仿真。 关键词: T型三电平逆变器、正弦脉宽调制、SIMULINK仿真
目录 第一章绪论 (6) 1.1研究背景及意义 .. 1.2三电平逆变器拓扑分类 第一章 T型三电平逆变器工作原理分析 (6) 1.1逆变器的结构 1.2本章小结 第二章正弦脉波调制(SPWM) (7) 3.1 PWM与SPWM的工作原理 3.2三电平逆变电路SPWM的实现 3.3本章小结 第三章电路仿真与参数计算 (10) 4.1逆变器的基本要求 4.2电路图 4.3调制电路 4.4L-C滤波电路 4.5结果分析 第四章课程设计小结 (14) 参考文献 (15)
第一章绪论 1.1 研究背景及意义 近年来,随着经济的飞速发展,人类对能源的需求也大幅度增加,而传统能源面临着枯竭的危机。在这种情况下,我们不得不加速开发新型能源。各国的专家致力于新能源的开发与利用,光伏发电、风力发电、生物发电等各种新型发电技术已经得到了一定的应用,并且正在蓬勃的发展,尤其是光伏发电,因其成本低、稳定性较好,控制简单等优点,在各国得到了广泛的应用。受地区气象条件的影响,太阳能光伏电池板输出的直流电压极不稳定,而且电压幅值低,容量小。为了高效利用太阳能,需要将不稳定的光伏电池串、并联组合,并且经过多级电力电子变换器组合输出恒频交流电压并网运行。而把这些初始能源转化为可用电能的桥梁就是逆变器。随着开关器件的不断发展,逆变器的拓扑、调制方式和控制策略也在不断发展,控制理论在逆变器的控制上得到了很好的应用,这一切都保证了优良的供电质量。在一些高电压、大功率的应用场合,传统的两电平逆变器由于开关器件耐压限制,无法满足需求。在这种情况下,如何将低耐压开关器件应用于高电压大功率场合成为各国专家研究的热点,由此,多电平逆变器技术应运而生。多电平的概念最早是由日本专家南波江章(A.Nabae)等人在 1980 年提出的[1],通过改变主电路的拓扑结构、增加开关器件的方式,在开关器件关断的时候将直流电压分散到各个器件两端,实现了低耐压开关器件在大功率场合应用。 1.2三电平逆变器拓扑分类 常见的多电平的电路拓扑主要有三种:二极管箝位型逆变器、飞跨电容箝位型逆变器和具有独立直流电源的级联型逆变器。本文研究的 T 型三电平逆变器可以说是中点箝位型逆变器的改进拓扑,其优势主要体现在减少了电流通路中的开关器件数量,减少了传导损耗。而且与二极管箝位型三电平逆变器相比,T 型三电平逆变器的每个桥臂少用了两个箝位二极管,其控制方法和二极管箝位型三电平逆变器类似[2]。T 型三电平逆变器融合了两电平和三电平逆变器的优势,既有两电平逆变器传导损耗低,器件数目少的优点,又有三电平逆变器输出波形好,效率高的优点,是很有发展前景的一种三电平逆变器拓扑。
第三节空间矢量脉宽调制SVPWM控制法 1.3.1 电压空间矢量SVPWM技术背景 我们先来回顾一下交流异步电机的工作机理:三相平衡的交流电压在电机定子绕组上产生三相平衡的交流电流;三相平衡的交流电流在定子内腔产生一个幅值恒定的磁链,该磁链在定子内腔旋转,旋转的角速度与电源(电流)的角速度相同;旋转的轨迹形成一个圆形的空间旋转磁场;旋转磁场通过电磁力矩带动转子旋转,在电动机状态下,转子旋转的角速度低于旋转磁场的角速度:转差,转差提交流异步电机产生力矩的根本原因。 前面所讨论的SPWM技术是从电源的角度出发,来合成电机的激励源。由交流异步电机的工作机理我们想到:可不可以直接从动力源出发,来直接合成一个圆形的旋转磁场呢?如果可以,这样的控制方法显然更直接,效果应更好。 如何直接合成一个圆形的旋转磁场呢? 对于交流电机,我们注意到以下的事实: 电机定子是固定的,不旋转的; 施加在定子上的电压是三相平衡的交流电:幅度相同,相位上彼此偏差120o; 自然地,我们想到:定义异步电机的三相定子绕组上的电压为平面上的一静止坐标系的三个轴,电机的相电压在各自的轴向上依正弦规律变化。见图2-1-10。 图2-1-10:相电压空间矢量图 由图2-1-10知,三个电压轴向量不同线性组合可以合成该平面上的任一个电压矢量u,即:
ππ34332201***j j j e A e A e A ++= 当三个电压轴向量对应于三相平衡交流电时,即:t U A m ωsin 1=, )32sin(2πω+=t U A m ,)3 4sin(3πω+=t U A m ,不难得到,所合成的电压矢量为: )sin (cos 2 3t j t U m ωω+= jwt m e U 2 3= 式(2-3-1) 由式(2-3-2)知,所合成的电压空间矢量具有以下特征: 电压矢量模(幅值)恒定; 电压矢量绕中性点旋转,旋转的轨迹是一个圆; 电压矢量绕中性点匀速旋转,旋转的角速度为ω; 电压矢量旋转的角速度与交流电源(电流)的角速度相同。 我们来看看电压空间矢量与空间旋转磁链之间的关系。 根据电机学理论,空间电流矢量,空间磁通矢量,电压空间矢量之间的关系为: dt d r i u ψ+=* 其中r *是电机绕组上的阻抗压降,在电机转速不是很低的情况下,通常可以忽略。于是上式可以写成: dt d ≈ 我们知道是一个空间旋转磁场:jwt m e ψ=, 于是=ψ=ψ≈+ππωωωω21)21(***)(j t j m t j m e e dt e d 式(2-3-2) 很明显,电压空间矢量,空间磁通矢量存在一维的线性关系,电压空间矢量的幅值(模)只与电机的角速度ω(转速)有关;相位上超前 π2 1。不难理解,这是由电机的电感属性引起的。 于是空间旋转磁场的特性可以用空间电压矢量的特性来等效。