伺服技术?SERVO TECHN IQUE
混合式步进电机SPWM 微步驱动技术的研究
林 波,李兴根
(浙江大学,浙江 杭州 310027)
摘 要:提出软硬件结合的数字模拟控制技术实现电流追踪型混合式步进电机SP WM 微步驱动,使混合式步进电机各相电流接近正弦波,以得到准同步交流电动机的圆形旋转磁场,大大削除了步进工况,同时使该驱动电源能运用于数字伺服调速系统。
关键词:SP WM ;步进电机;微步驱动
中图分类号:TM 301.2 文献标识码:A 文章编号:1001-6848(2000)03-0016-03
Research on SP WM Subd iv ided D r iv i ng M ethod of Hybr id Stepp i ng M otor
L I N Bo ,L I X ing -gen
(Zhejiang U n iversity ,H angzhou 310027,Ch ina )
Abstract :A new m ethod u sing SP WM (the style of traced cu rren t )to realize adju stab le m icro step driving stepp ing mo to r is repo rted in th is article .T he m ethod m akes cu rren t in each phase si m ilar to sine w ave and em u lates round ro tati on m agnetic field of synch ronou s mo to r .It also gets rid of mo to r’s stepp ing state greatly .W hat’s mo re ,th is driving supp ly can be app lied to the digital con tro l system fo r w ide range speed adju sting effect .Key words :SP WM ;stepp ing mo to r ;m icro step drive
收稿日期:2000-02-24
1 引 言
步进电机在工业控制的各方面应用十分广泛,
其主要优点是开环运行的机制获得了接近闭环的良好性能。但在控制要求高的场合却只能用带位置闭环的直流电机,系统成本大大增加。
理论上,只要将一个整步无限细分便可看作是连续运行。实际上受元器件的限制,虽不能完全连续运行,当微步数足够大时,便能满足精度要求。本文实现的微步驱动方法具有简洁、可变、普适性及推广的价值。
2 原 理
以二相混合式步进电机为例,先介绍转矩表达
式和圆形旋转磁场的形式。
如果忽略涡流和饱和效应等其他非线性因素,其力矩方程为:
T (Η
)=K t I a sin Η+K t I b sin (Η-90°)式中 K t ——力矩常数
I a ,I b ——相电流
Η
——电气角为进行细分,可令相电流为:
I a =I co s (Α
),I b =I sin (Α),则T (Η)=K t I (co s Αsin Η2sin Αco s Η
)=K t I (Α-Η)I 为额定电流,Α为时间函数,其值为所要求的
步进位置。空载时,转子的平衡位置由T (Η
)=0决定,可见平衡位置移动了Α角,也就是需要的角位移。
两相对称绕组通入两相对称电流就能产生圆形旋转磁场,这是因为由电流产生的磁密相量为:
B a =B a m sin Ξt
B b =B bm sin (Ξt -90°
) B a m =B bm =B m
A 相和
B 相的磁密矢量和长度在整个时域内均为B m ,且其方向是随时间的变化在空间进行旋转。
3 系 统
整个系统主要由微步信号发生环节,线性PWM 斩波环节,自举驱动环节,全H 桥主回路4部分构成。
3.1 参考波形数据产生
先用C 或M A TLAB 等语言对正弦波进行360°N 微步角度均分,即需要多少微步就把360°均分成多少个采样点,算出各采样点的正弦值,然后对得到的浮点数进行2进制量化处理,针对8位D A 转换得到2进制偏移量,将此数据输入EPROM ,这样数据处理工作即完成。
—
61—微电机 2000年 第33卷 第3期(总第114期)
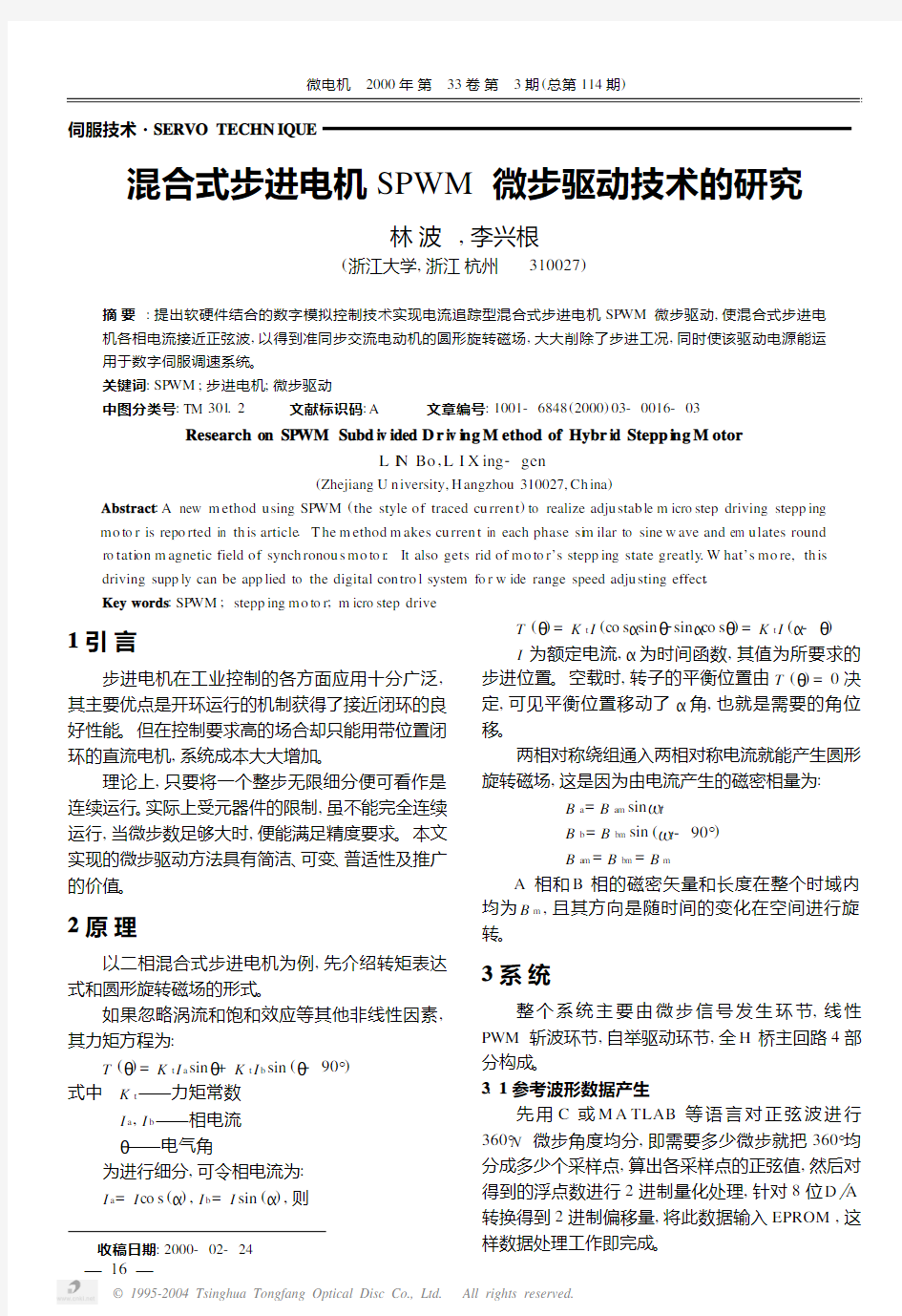
以8微步为例,图1中参考波形之间有90°的相位差,由于全H 桥对桥导通的要求,本系统巧妙地对每相参考波形值分三类作了两种控制状态的同步控制标记位,即大于零的点标为0,等于零的点标为1,小于零的点标为1,控制标记0表示该相导通,1表示该相截止,这些标记和参考波形值分放在不同的EPROM 中,但它们一一对应地存放在相同的地址下,以便同步可逆计数器按地址同步选出。该控制标记用来控制TL 494的死区端,从而控制PWM 信号的输出。这样处理的好处有两点,一是控制标记和参考波形的输出是同步的,二是每相信号都有天然的桥臂互锁时间,即参考波形的零值所对应的标记1,为1时关断桥臂,避免了直通现象。参考波形相位见图1
。
图1 A 、B 两相电流波形
3.2 微步信号发生环节
同步可逆计数器由两片CD 4516级连而成,二者共受同一个清零信号控制,以便周期循环可变进制计数,高位计数器的CP 脉冲由低位计数器的进位输出送入。8位数据输出线可寻址256个单元,27C 64有很多页,这里用了4页,存放4档微步参考
波形值,即8、32、64、128微步4种。页的寻址由高位地址线来完成。
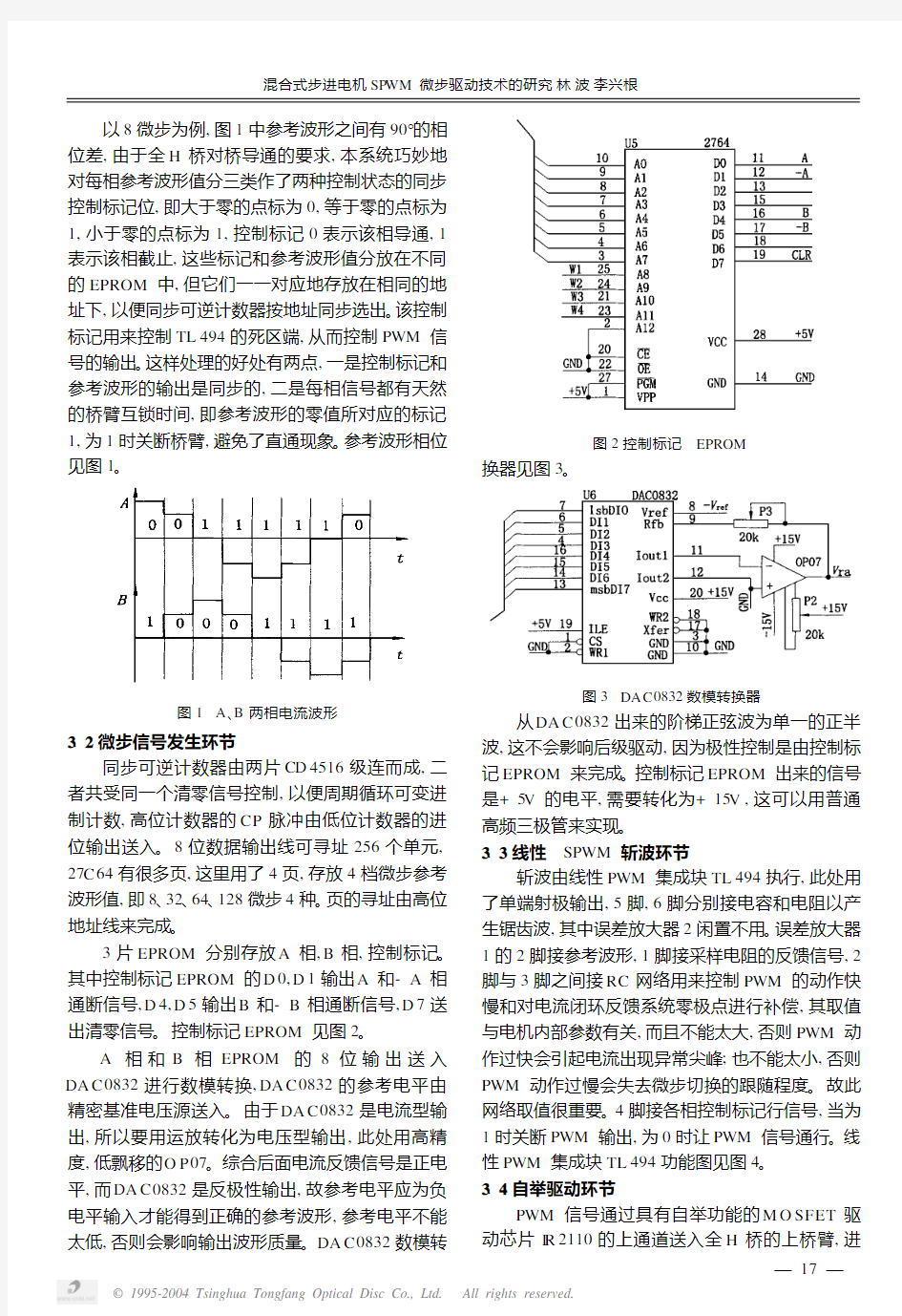
3片EPROM 分别存放A 相,B 相,控制标记。
其中控制标记EPROM 的D 0,D 1输出A 和-A 相
通断信号,D 4,D 5输出B 和-B 相通断信号,D 7送出清零信号。控制标记EPROM 见图2。
A 相和
B 相EPROM 的8位输出送入DA
C 0832进行数模转换,DA C 0832的参考电平由
精密基准电压源送入。由于DA C 0832是电流型输出,所以要用运放转化为电压型输出,此处用高精度,低飘移的O P 07。综合后面电流反馈信号是正电平,而DA C 0832是反极性输出,故参考电平应为负电平输入才能得到正确的参考波形,参考电平不能太低,否则会影响输出波形质量。DA C 0832
数模转
图2 控制标记EPROM
换器见图3
。
图3 DA C 0832数模转换器
从DA C 0832出来的阶梯正弦波为单一的正半
波,这不会影响后级驱动,因为极性控制是由控制标记EPROM 来完成。控制标记EPROM 出来的信号是+5V 的电平,需要转化为+15V ,这可以用普通高频三极管来实现。
3.3 线性SPWM 斩波环节
斩波由线性PWM 集成块TL 494执行,此处用了单端射极输出,5脚,6脚分别接电容和电阻以产生锯齿波,其中误差放大器2闲置不用。误差放大器1的2脚接参考波形,1脚接采样电阻的反馈信号,2
脚与3脚之间接RC 网络用来控制PWM 的动作快慢和对电流闭环反馈系统零极点进行补偿,其取值与电机内部参数有关,而且不能太大,否则PWM 动作过快会引起电流出现异常尖峰;也不能太小,否则PWM 动作过慢会失去微步切换的跟随程度。故此
网络取值很重要。4脚接各相控制标记行信号,当为1时关断PWM 输出,为0时让PWM 信号通行。线性PWM 集成块TL 494功能图见图4。3.4 自举驱动环节
PWM 信号通过具有自举功能的M O SFET 驱
动芯片I R 2110的上通道送入全H 桥的上桥臂,进
—
71—混合式步进电机SP WM 微步驱动技术的研究 林 波 李兴根
图4 线性P WM 集成块TL 494功能图
行下桥导通、上桥斩波的工作过程。I R 2110是国际整流器公司的产品,有两个完全独立的高保真输入输出通道,且两个通道有开通慢、关断快的防桥臂直通的互锁功能,加上原有的互锁控制信号,使得主电路工作更为可靠。I R 2110的典型接法见图5
。
图5 I R 2110的典型接法
I R 2110的上通道输出级的工作电源是一悬浮
电源,这是通过一种自举技术由固定的电源得来的。充电二极管的耐压能力必须大于高压母线的峰值电压,推荐采用一个快恢复的二极管。自举电容C 1的值对于5kH z 以上的开关频率取011ΛF 即可。应用中应在V cc 和COM 间,VDD 和V SS 间连接两个旁路电容,这两个电容及VB 和V S 间的储能电容都要与器件就近连接。建议V CC 上的旁路电容用一个011ΛF 的陶瓷电容和一个1ΛF 的钽电容并联,而逻辑电源VDD 上有一个011ΛF 的陶瓷电容已足够了。每个M O SFET 应分别连接到I R 2110的2脚和5脚作为栅极驱动信号的反馈。串入一个栅极电阻可以消除振荡。3.5 主电路
主电路中采样电阻的放置很讲究。由于工作过程分为导通、续流、抑制三个过程,若要保持良好的电流追踪性,要求反馈信号实时地反映电流变化的状况,将采样电阻放入续流回路将有这方面的益处。主电路见图6。
续流可分为有源和无源两种。若用无源续流,
则图6 主电路
由于电机电感和电阻参数变化较大,如果续流回路的时间常数很大,电流的下降很慢,对微步运行的电流下降期间极为不利。无源续流是由于上桥斩波,下桥导通引起的,故斩单桥臂只对低频等要求不高的场合有应用价值。
为了改善无源续流时电流下降过慢的情况,可以采用有源续流,即同时斩双桥。上下桥同时截止时,将发生有源抑制,迫使绕组中的电流快速下降,从而基本跟随设定的电流波形,使得电机在低中频段都能进行微步运行。
在有源续流时,由于M O SFET 中的寄生二极管的存在,使得续流电流在地点分为两路,一路即所希望的通过快复二极管续流,见回路1,但另一路则反向通过采样电阻和寄生二极管续流,见回路2,使得采样电阻上出现负值电流,其幅值较大时会引起单电源工作的TL 494工作不正常。相应的措施有主动防止和被动防止两种。主动防止可在下桥M O S 2FET 的漏极和电感之间反向串入一个快复二极管,
性能参数均与续流快复二极管一样。这样使得寄生二极管无效,只留下快复二极管进行续流。被动防止则加入精密检波环节,削去负值波形,同时不失真地保留原有的正值波形。
在有源续流时,用采样电阻这种方式进行反馈有不足之处,它将连续电流波形分成了离散电流波形,而比较端的设定电流波形为连续信号。根据自动控制理论,此离散电流信号必须经过一个采样保持器,将它转化为连续信号后才能被送到比较端进行比较。具体器件可用L F 398等采样保持器。
4 结 论
研制的微步驱动器用于130B YG 250型、8A 每
(下转第20页)
—
81—
图2 集成电路单相电动机速度控制器
直流电源,见图2中整流桥B R 1及R P1、R 1、C 1、R 14、D z 组成的整流电路稳压电源。该电源是整流后先用电位器分压,再经稳压管D z 稳压,稳压后的直流电源连接三条并联的负载。一条是经电位器作调压控制的给定值,另一条供给运算放大器,第三条用作集成触发器的直流电源,所以电路中直流量较大,在选择元件时必须选容量大的元件。
控制器的给定量与反馈量的偏差信号的放大由运算放大器ΛA 741及三极管T 1来实现。见图2中R 2~R 10、C 3及T 1、ΛA 741。给定量来自电位器分压的直流量,反馈量来自速度传感器的输出信号,二者分别接运算放大器的同位输入端和反相输入端。为实现运算放大器的输出与输入满足U 0=A uf (U gd -U f )关系,必须选用适当的R 2、R 3、R 4、R 5,调节R 5可得到不同的放大倍数,满足触发器的要求。运算放大器实现电压放大后,再经一级单管放大电路,其输出作为集成触发器的控制信号,该电路输出电压最高可达8V 。
集成触发器具有调试方便、适用范围广、体积小、成本低等特点。在本控制器中用来触发双向晶闸管,使输出电压随控制角变化,进而实现单相电动机速度控制。图2中,TCA 780集成触发器与D 1、D 2、R 11、R 12组成双向晶闸管调压的触发电路,调R 11的大小可改变触发电压的大小及控制角。
本电路对晶闸管采用R 13、C 4阻容吸收电路作过电压保护,由于用户反应电容C 4时有被击穿的现象发生,需选择耐压高的电容器。
参考文献:
[1] 姜泓,赵洪恕.交流调速系统[M ].武汉:华中理工大学
出版社,1996.
[2] 宋家成.实用机械电气技术手册[M ].济南:山东科技
出版社;1993.
作者简介:季致和(1945—),男,江苏南通人,副教授,从事工业自动化的教学与研究。
(上接第18页)
相、28Nm 的二相混合式步进电机具有良好的调速和驱动性能。其它混合式步进电机的微步驱动可以运用本文的思想加以推广。
参考文献:
[1] 周尊源,S .M .欧文斯.正弦波细分步进电机微步驱动
器[J ].微特电机,1997(5).
[2] 冯志华,孟咏.一种可用于高精度细分的多能环分器
[J ].微特电机,1998(6).
[3] 谭建成.电机控制专用集成电路[M ].机械工业出版
社,1998.
[4] 陈伯时.电力拖动自动控制系统[M ].机械工业出版
社,1992.
作者简介:林波(1975—),浙江桐庐人,浙江大学电机及控制专业硕士研究生,师从李兴根副教授,主要研究方向为微特电机及控制。
—
02—
中国地质大学长城学院 本科课程设计题目:基于80C51单片机的步进电机控制系统 系别信息工程系 学生姓名 专业电气工程及其自动化 学号 指导教师 职称讲师 2014 年6 月11 日
摘要 本文研究基于51系列单片机的步进电机控制系统设计,该系统包括以下几个部分:数据采集、数据处理、终端接收,该系统以汇编语言为单片机的驱动程序语言,单片机控制步进电机,主要任务是把二进制数变成脉冲序列,按相序输入脉冲以实现电机转动方向控制,利用单片机实现对步进电机的远距离实时监控,从而达到高效、节能的控制步进电机工作的目的,该系统具有成本低、控制方便的特点。使用单片机驱动四相步进电机,控制步进电机以四相八拍的方式运行,来实现步进电机正向/反向旋转,P1.0~P1.3分别控制步进电机;P1.5~P1.7分别控制步进电机的停止、正转、反转。 关键词:51单片机;步进电机;数据采集;汇编语言;
目录 摘要 0 1 设计目的 (1) 2设计内容与要求 (1) 3 总体设计方案 (1) 3.1整体方案 (1) 3.2具体方案实现 (1) 4系统硬件设计 (2) 4.1复位电路 (2) 4.2晶振电路 (2) 4.3按键电路 (3) 4.4指示灯电路 (3) 4.5驱动电路 (4) 4.6步进电机 (4) 5程序软件设计 (5) 5.1程序流程图 (5) 5.2源程序 (6) 6系统调试与仿真 (7) 7总结 (8)
1设计目的 1.掌握单片机控制步进电机的硬件接口电路。 2.掌握步进电机驱动程序的设计和调试方法。 3.熟悉步进电动机的工作特性。 2设计内容与要求 1.查阅资料,了解步进电机的工作原理。 2.通过单片机给定参数控制电机转动。 3.通过按钮控制正转、反转和停止。 3总体设计方案 3.1整体方案 本系统主要是由AT89C51,步进电机控制器ULN2004,步进电机,通过单片机编程,实现步进电机控制的脉冲分配,使电机实现正转,反转以及停止等功能 3.2具体实现方案 根据系统要求画出单片机控制步进电机的控制框图,见下图。系统包括单片机、按键、驱动电路和步进电机。 键盘80c51单片机 步进电机 驱动电路
1、主程序先正转,等到正转完了就中断,中断中接通个辅助触点(),当闭合,住程序中的反转开始运做。这样子就OK了。 2、用PTO指令让OR 高速脉冲,另一个点如做方向信号,就可以控制正反转了,速度快慢就要控制输出脉冲周期了,周期越短速度越快,如果你速度很快的话请考虑缓慢加速,不然它是启动不了的,如果方向也变的快的话就要还做一个缓慢减速,不然它振动会蛮厉害,而且也会失步。 3、程NETWORK 1 // 用于单段脉冲串操作的主程序(PTO) // 首次扫描时,将映像寄存器位设为低 // 并调用子程序0 LD R 1 CALL SBR_0 NETWORK 1 // 子程序0开始 LD MOVB 16#8D SMB67 // 设置控制字节: // - 选择PTO操作 // - 选择单段操作 // - 选择毫秒增加 // - 设置脉冲计数和周期数值 // - 启用PTO功能 MOVW +500 SMW68 // 将周期设为500毫秒。 MOVD +4 SMD72 // 将脉冲计数设为4次脉冲。 ATCH INT_0 19 // 将中断例行程序0定义为 // 处理PTO完成中断的中断。 ENI // 全局中断启用
PLS 0 // 激活PTO操作,PLS0 =》 MOVB 16#89 SMB67 // 预载控制字节,用于随后的 // 周期改动。 NETWORK 1 // 中断0开始 // 如果当前周期为500毫秒: // 将周期设为1000毫秒,并生成4次脉冲 LDW= SMW68 +500 MOVW +1000 SMW68 PLS 0 CRETI NETWORK 2 // 如果当前周期为1000毫秒: // 将周期设为500毫秒,并生成4次脉冲 LDW= SMW68 +1000 MOVW +500 SMW68 PLS 0序注释 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解相关PLC产品的选型,报价,采购,参数,图片,批发等信息,请关注艾驰商城。
单片机驱动步进电机程 序代码 Company Document number:WTUT-WT88Y-W8BBGB-BWYTT-19998
/******************************************************** 实现功能:正转程序 使用芯片:AT89S52 晶振: 编译环境:Keil 作者: 【声明】此程序仅用于学习与参考,引用请注明版权和作者信息!********************************************************/ #include<> //库文件 #define uchar unsigned char //字符型宏定义 #define uint unsigned int //整型宏定义 uchar tcnt; //定时器计数初值定义 uint sec; //速度值定义 uchar buf[11]; uchar bai,shi,ge; /********************控制位定义*************************/ sbit shi_neng=P1^0; // 使能控制位 sbit fang_shi=P1^1; // 工作方式控制位 sbit fang_xiang=P1^2;// 旋转方向控制位 sbit mai_chong=P1^3; // 脉冲控制位 /********************延时函数***************************/ void delay1ms(uchar z) { uchar x,y; for(x=0;x 我上周刚做的这个实验成功拉,给你参考一下吧这可是我当时辛辛苦苦编出来的啊,不过我用的是L298驱动的和ULN2003一样,你把它换成2003就行拉 #include for(j=200;j>0;j--); temp=P3; temp=temp&0x0f; if(temp!=0x0f) { temp=P3; temp=temp&0x0f; switch(temp) { case 0x0e: key=1; break; case 0x0d: key=2; break; case 0x0b: key=3; break; case 0x07: key=4; break; } temp=P3; temp=temp&0x0f; while(temp!=0x0f) { temp=P3; temp=temp&0x0f; } } } P3=0xff; P3_5=0; temp=P3; temp=temp&0x0f; if(temp!=0x0f) { for(i=50;i>0;i--) for(j=200;j>0;j--); temp=P3; temp=temp&0x0f; if(temp!=0x0f) { temp=P3; temp=temp&0x0f; switch(temp) 单片机控制步进电机驱动器工作原理 步进电机在控制系统中具有广泛的应用。它可以把脉冲信号转换成角位移,并且可用作电磁制动轮、电磁差分器、或角位移发生器等。 有时从一些旧设备上拆下的步进电机(这种电机一般没有损坏)要改作它用,一般需自己设计驱动器。本文介绍的就是为从一日本产旧式打印机上拆下的步进电机而设计的驱动器。 本文先介绍该步进电机的工作原理,然后介绍了其驱动器的软、硬件设计。 1. 该步进电机为一四相步进电机,采用单极性直流电源供电。只要对步进电机的各相绕组按合适的时序通电,就能使步进电机步进转动。图1是该四相反应式步进电机工作原理示意图。 图1 四相步进电机步进示意图 开始时,开关SB接通电源,SA、SC、SD断开,B相磁极和转子0、3号齿对齐,同时,转子的1、4号齿就和C、D相绕组磁极产生错齿,2、5号齿就和D、A相绕组磁极产生错齿。 当开关SC接通电源,SB、SA、SD断开时,由于C相绕组的磁力线和1、4号齿之间磁力线的作用,使转子转动,1、4号齿和C相绕组的磁极对齐。而0、3号齿和A、B相绕组产生错齿,2、5号齿就和A、D相绕组磁极产生错齿。依次类推,A、B、C、D四相绕组轮流供电,则转子会沿着A、B、C、D方向转动。 四相步进电机按照通电顺序的不同,可分为单四拍、双四拍、八拍三种工作方式。单四拍与双四拍的步距角相等,但单四拍的转动力矩小。八拍工作方式的步距角是单四拍与双四拍的一半,因此,八拍工作方式既可以保持较高的转动力矩又可以提高控制精度。 单四拍、双四拍与八拍工作方式的电源通电时序与波形分别如图2.a、b、c所示: a. 单四拍 b. 双四拍 c八拍 图2.步进电机工作时序波形图 2.AT89C2051 步进电机驱动器系统电路原理如图3: 基于单片机A T S控制步进 电机正反转 The latest revision on November 22, 2020 目录 步进电机 (7) 附件A 源程序 .......................................... (12) 附件B 仿真结果 (15) 致谢 (18) 摘要 能够实现步进电机控制的方式有多种,可以采用前期的模拟电路、数字电路或模拟与数字电路相结合的方式。近年来随着科技的飞速发展,单片机的应用正在不断深入,同时带动传统控制检测日新月异更新。本文介绍一种用AT89S52作为核心部件进行逻辑控制及信号产生的单片机技术和汇编语言编程设计的步进电机控制系统,步进电机背景与现状、硬件设计、软件设计及其仿真都做了详细的介绍,使我们不仅对步进电机的原理有了深入的了解,也对单片机的设计研发过程有了更加深刻的体会。本控制系统采用单片机控制,通过人为按动开关实现步进电机的开关,复位。该系统还增加了步进电机的加速及减速功能。具有灵活方便、适用范围广的特点,基本能够满足实践需求。 关键词: AT89S52 步进电机 ULN2003 第一章系统分析 框图设计 根据系统要求画出基于AT89S52单片机的控制步进电机的控制框图如图2-1所示。 图2-1基于AT89C52单片机的控制步进电机的控制框图 系统主要包括单片机、复位电路、晶振电路、按键电路、步进电机及驱动电路几部分。 晶振电路 AT89C52单片机有一个用于构成内部振荡器的反相放大器,XTAL1 和XTAL2 分别是放大器的输入、输出端。石英晶体和陶瓷谐振器都可以用来一起构成自激振荡器。 晶振模块自带振荡器、提供低阻方波输出,并且能够在一定条件下保证运行。最常用的两种类型是晶振模块和集成RC振荡器(硅振荡器)。晶振模块提供与分立晶振相同的精度。硅振荡器的精度要比分立RC振荡器高,多数情况下能够提供与陶瓷谐振槽路相当的精度。图2-2为晶振电路。 图2-2 晶振电路 第二章系统设计 硬件连接图 根据图2-1,可以设计出单片机控制步进电机的硬件电路图,如图3-1所示。 一、设计任务书 设计内容:用80C51单片机设计一个步进电机控制器 设计要求: 1.用8015设计一个四相步进电机。 2.可控制步进电机的启动与停止,正转与反转。 3.10档速度调节。 4.点动控制。 5.可显示电机运行参数。 二、设计总体方案 (一)控制方式的选择 控制主要用于电机速度和方向的转换。控制方式有按键控制和开关控制两种。按键较开关而言,操作更加简便,故选按键控制。 方案一:独立按键。独立按键可自由连接,线路简单。 方案二:编码式键盘。编码式键盘的按键接触点接于74LS148芯片。当键盘上没有闭合时,所有按键都断开,当某一键闭合时,该键对应的编码由74LS148输出。 本次设计所需按键不多,不需要采用复杂编码,考虑硬件条件、线路连接和经济性等方面,选择方案一。 (二)电机电路设计方案的选择 由于条件的限制,对于电机的选择只能是实验台上最小步距角18°的电机,其中已包含了驱动电路。 (三)单片机的选择 方案一:AT89C51高性能8位单片机,内部集成CPU、存储器、寄存器、I/O接口,从而构成较为完整的计算机,价格便宜。 方案二:C8051F005单片机,该单片机是完全集成的混合信号系统及芯片,具有8051兼容的微控制器内核,与MCS-51指令集完全兼容。除了具有标准8052的数字外设部件,片内还继承了数据采集和控制系统中常用的模拟部件和其他数字外设及功能部件,执行速度快,但价格较贵。 本次课程设计是在仿真环境下进行,没有太过考虑单片机选择的问题,但就设计本身来讲,从物美价廉的角度考虑,选择方案一较合适。 (四)显示方案的选择 方案一:采用LED数码管。LED数码管是轮流现实的,其利用人烟的视觉暂留特性,使人感觉不到数码管闪动,看到每只数码管都常亮。利用其显示必须不停给数码管数据输入口循环赋值,显示内容较多,编程和接线较为复杂。 方案二:采用LCD1602液晶显示器。LCD1602具有功率小,效果明显,变成容易等优点,且它最多能显示2×16个字符,可以轻松满足设计要求。 由上可知,LCD1602液晶显示器的优点突出,故选择方案二。 (五)软件部分的选择 软件部分的选择主要是指编程语言的选择,编译调试工具根据设计平台选择伟福软件。编程语言主要有以下两种方案。 目录 一前言 (1) 二总体方案设计 (1) 1工作原理 (1) 2方案选择 (1) 2.1时钟脉冲 (1) 2.2脉冲分配器 (1) 2.3驱动器 (1) 3 总的框架 (2) 三单元模块设计 (2) 1单片机模块 (2) 1.1复位控制 (3) 1.2单片机频率 (3) 2接口 (3) 3驱动器ULN2003 (4) 4按键模块 (5) 5步进电机 (5) 5.1工作原理 (5) 5.2 28BYJ48型四相八拍 (7) 四整机调试与技术指标测量 (8) 五设计总结 (8) 参考文献 (9) 附录1电路原理图 (10) 附录2 源程序 (11) 一、前言 步进电动机是一种将电脉冲信号转换成机械位移的机电执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。 二、总体方案设计 1、工作原理 步进电机是一种将电脉冲转化为角位移的执行机构。通俗一点讲:当步进驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(及步进角)。您可以通过控制脉冲个数来控制角位移量,从而达到准确定位的目的;同时您可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 2、方案选择 (1)时钟脉冲 通常有两种方法实现: 方案一直接有硬件组成如:多谐振荡器 LC 等。 方案二用软件的方式形成优点便于随时更改,调整。 为了方便我们选用软件方式有单片机实现。 (2)脉冲分配器 方案一硬件环形分配器:由计数器等数字电路组成的。有较好的响应速度,且具有直观、维护方便等优点。 方案二软件环分:由计算机接口电路和相应的软件组成的。受到微型计算机运算速度的限制,有时难以满足高速实时控制的要求。由软件完成脉冲分配工作,不仅使线路简化,成本下降,而且可根据应用系统的需要,灵活地改变步进电机的控制方案。 考虑到硬件设备的有限和对步进电机的控制我们选择软件环分可以有单片机实现。 (3)驱动器 方案一使用功率场效应管的单电压功放电路。 步进电机驱动方式的分类及比较 步进电机驱动方式的分类及比较:步进电机驱动方法的分类主要有恒电压驱动方式、恒电流斩波驱动方式和细分驱动方式。以下是这几种驱动方式的简介及比较。 1 恒电压驱动方式 1.1 单电压驱动 单电压驱动是指在电机绕组工作过程中,只用一个方向电压对绕组供电。如图2所示,L为电机绕组,VCC为电源。当输入信号In为高电平时,提供足够大的基极电流使三极管T处于饱和状态,若忽略其饱和压降,则电源电压全部作用在电机绕组上。当In为低电平时,三极管截止,绕组无电流通过。 为使通电时绕组电流迅速达到预设电流,串入电阻Rc;为防止关断T时绕组电流变化率太大,而产生很大的反电势将T击穿,在绕组的两端并联一个二极管D和电阻Rd,为绕组电流提供一个泄放回路,也称“续流回路”。 单电压功率驱动电路的优点是电路结构简单、元件少、成本低、可靠性高。但是由于串入电阻后,功耗加大,整个功率驱动电路的效率较低,仅适合于驱动小功率步进电机。 1.2 高低压驱动 为了使通电时绕组能迅速到达设定电流,关断时绕组电流迅速衰减为零,同时又具有较高的效率,出现了高低压驱动方式。 如图3所示,Th、T1分别为高压管和低压管,Vh、V1分别为高低压电源,Ih、I1分别为高低端的脉冲信号。在导通前沿用高电压供电来提高电流的前沿上升率,而在前沿过后用低电压来维持绕组的电流。高低压驱动可获得较好的高频特性,但是由于高压管的导通时间不变,在低频时,绕组获得了过多的能量,容易引起振荡。可通过改变其高压管导通时间来解决低频振荡问题,然而其控制电路较单电压复杂,可靠性降低,一旦高压管失控,将会因电流太大损坏电机。 2 恒电流斩波驱动方式 2.1 自激式恒电流斩波驱动 图4为自激式恒电流斩波驱动框图。把步进电机绕组电流值转化为一定比例的电压,与D/A转换器输出的预设值进行比较,控制功率管的开关,从而达到控制绕组相电流的目的。从理论上讲,自激式恒电流斩波驱动可以将电机绕组的电流控制在某一恒定值。但由于斩波频率是可变的,会使绕组激起很高的浪涌电压,因而对控制电路产生很大的干扰,容易产生振荡,可靠性大大降低。 DELAY 1MS MACRO TIME ;延时宏命令 LOCAL AA LOCAL BB PUSH CX MOV CX,TIME AA: PUSH CX MOV CX,1000 BB: NOP LOOP BB POP CX LOOP AA POP CX ENDM DATA SEGMENT TABA DB 01H,03H,02H,06H,04H,05H;正转的模型 TABB DB 05H,04H,06H,02H,03H,01H;反转的模型DATA ENDS CODE SEGMENT ZZ PROC NEAR PUSH DS MOV AX,DATA MOV DS,AX MOV AX,0 PUSH AX MOV DX,203H MOV AL,80H OUT DX,AL ;8255的控制字设定 MOV DX,200H MOV AL,0 OUT DX,AL ;先输出制动命令 MOV CX,360 ;设定正转步数 DD: MOV BL,6 ;六拍 MOV DX,200H LEA DI,TABA ;指针指向正转的数字模型 CC: MOV AL,[DI] OUT DX,AL DELAY 1MS 10 INC DI ;指针加1,指向下一步的数字模型 DEC BL ;拍数减1 JNZ CC ;六拍未结束,则继续循环 LOOP DD;360个周期的六拍未结束,继续循环 ZZ ENDP FZ PROC NEAR MOV CX,400 ;设定反转步数 FF: MOV BL,6 MOV DX,200H LEA DI,TABB ;指针指向反转的数字模型 EE: MOV AL,[DI] OUT DX,AL DELAY 1MS 10 DEC DI ;指针减1,指向反转下一步数字模型 DEC BL JNZ EE LOOP FF FZ ENDP MOV DX,200H MOV AL,0 OUT DX,AL ;结束后,输出制动命令 RET MAIN ENDP CODE ENDS END START 步进电机 学习交流群——126500542(验证信息:千寻琥珀心) 在这里介绍一下如何用51单片机驱动步进电机。 本例所使用的步进电机为四项驱动,驱动电压为12V,锯齿角(为什么叫锯齿叫而不叫步进角,我也不知道这样解释是否正确,但是根据步进角计算公式所得的结果将7.5理解为锯齿叫会更好些,也在网上搜了不少资料,说是步进角的较多,但都是直接给出的,而未作出计算,不过也有是将其作为锯齿角的,并且结合书上的内容,在此就将此作为锯齿角理解,那何谓步进角,下面公式将给出)为7.5度。(也就是说锯齿之间的单位角度),不进一圈总共需要360度,故有48个锯齿。 在此对电路图部分不再给出,具体引脚连接接下来给出。本例所使用的电机驱动芯片为达林顿驱动器(ULN2003),通过P1.0~P1.3分别接通步进电机的驱动线圈来控制步进电机的运转。注意如果直接使用单片机通过驱动芯片驱动电机,力矩可能不够大,效果不是很好,因为ULN2003的驱动电压为12V,而单片机系统电压为5V,故请读者注意此点,在设计电路时,另施电压。 步进电机要想正常工作,必须有驱动信号,转动的速度与驱动信号的频率是成正比的。(实例中将会给出并予以说明)接下来我们看看对于电机驱动中的信号的产生。 本例中采用的步进电机为四项,三项驱动和四项驱动原理上 是一样的。假设步进电机的四个项为:A、B、C、D。它的拍数可由读者任意设定(即步进节奏)。再继续下面的内容时,我们现在此给出一个计算步进电机的公式:Qs=360/NZr,其中N=McC 为运行的拍数,McC为控制绕组项数,C为状态系数,当采用单双本项拍数时,C=1,当采用单双本项一倍拍数时,C=2。(此处说的本项拍数,如三项为单三拍,双三拍。本项一倍拍数为单六拍,简言之,三拍为1.六拍为2对于四项则四拍为1,8拍为2(说的有些玄乎,手中板砖还望留情)),Zr为转子齿数,先来看看单四拍,即A→B→C→D→A.因为上述已经给出了锯齿数,此例C=1,所以Qs=360/(4*1*48)=1.875°。故此电机的步进角为1.875°(既步与步之间的角度),因为行进是和脉冲有关的,一个脉冲行进一步,那么行进一圈,所需脉冲数为:360/1.875=192个脉冲。同时我们如果控制这些脉冲的频率就可以直接控制步进电机的运转速度了。继续我们的单四拍,运行方向A→B→C→D →A。(假设为正转)则在程序中对应的操作执行码为:(硬件连接时P1口的高四位不用全置1,此处只需用到低四位) P1.3 P1.2 P1.1 P1.0 D C B A (对应4个线圈) 1 1 1 0 0xfe (根据外部链接电路定,也可以是0001,此处采用低电平导通,导通A项线圈) 1 1 0 1 0xfd (导通B项线圈) 1 0 1 1 0xfb (导通C项线圈) 单片机原理及系统课程设计 1 引言 步进电机又称为脉冲电动机或阶跃电动机,它是基于最基本的电磁感应作用,将电脉冲信号转变为角位移或线位移的开环控制元件。单片机控制的步进电机广泛地应用于工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,大型望远镜,卫星天线定位系统等等。 随着经济的发展,技术的进步和电子技术的发展,步进电机的应用领域更加广阔,同时也对步进电机的运行性能提出了更高的要求。 步进电机的原始模型起源于1830年至1860年,1870年前后开始以控制为目的的尝试,应用于氩弧灯的电极输送机构中,这被认为最早的步进电机。 1950年后期晶体管的发明也逐渐应用在步进电机上,对于数字化的控制变得更为容易。到20世纪60年代后期,在步进电机本体方面随着永磁材料的发展,各种实用性步进电机应运而生。步进电机往后经过不断改良,使得今日步进电机已广泛运用在需要高定位精度、高分解能、高响应性、信赖性等灵活控制性高的机械系统中。 在生产过程中要求自动化、省人力、效率高的机器中,我们很容易发现步进电机的踪迹,尤其以重视速度、位置控制、需要精确操作各项指令动作的灵活控制性场合步进电机用得最多。 2 设计方案与原理 4.1 设计方案 设计一个51单片机四相步进电机控制系统要求系统具有如下功能: (1)由I/O口产生的时序方波作为电机控制信号; (2)信号经过驱动芯片驱动电机的运转; (3)电机的状态通过键盘控制,包括正转,反转,加速,减速,停止和单步运行。 4.2 设计原理 步进电机实际上是一个数字\角度转换器,也是一个串行的数\模转换器。步进电机的基本控制包括启停控制、转向控制、速度控制、换向控制4个方面。从结构上看,步进电机分为三相、四相、五相等类型,本次设计的是四相电机。四相步进电机的工作方式有单四拍、双四拍和单双八拍三种。 在本次设计中,我们使用的是四相单八拍的工作方式。通过P1口给A,B,C,D四相依次输出高电平即可实现步进电机的旋转,通过控制两次输出的间隔,即可实现对步进电机的速度控制。 图 2.1 步进电机内部结构截图 根据步进电机的相关相序表我们可以正常的控制电机的步进运行。 步进电机工作原理、驱动控制系统与选型 一、感应子式步进电机工作原理 (一)反应式步进电机原理 由于反应式步进电机工作原理比较简单。下面先叙述三相反应式步进电机原理。 1、结构: 电机转子均匀分布着很多小齿,定子齿有三个励磁绕阻,其几何轴线依次分别与转子齿轴线错开。0、1/3て、2/3て,(相邻两转子齿轴线间的距离为齿距以て表示),即A与齿1相对齐,B与齿2向右错开1/3て,C与齿3向右错开2/3て,A'与齿5相对齐,(A'就是A,齿5就是齿1)下面是定转子的展开图: 2、旋转: 如A相通电,B,C相不通电时,由于磁场作用,齿1与A对齐,(转子不受任何力以下均同)。 如B相通电,A,C相不通电时,齿2应与B对齐,此时转子向右移过1/3て,此时齿3与C偏移为1/3て,齿4与A偏移(て-1/3て)=2/3て。 如C相通电,A,B相不通电,齿3应与C对齐,此时转子又向右移过1/3て,此时齿4与A偏移为1/3て对齐。 如A相通电,B,C相不通电,齿4与A对齐,转子又向右移过1/3て。 这样经过A、B、C、A分别通电状态,齿4(即齿1前一齿)移到A 相,电机转子向右转过一个齿距,如果不断地按A,B,C,A……通电, 电机就每步(每脉冲)1/3て,向右旋转。如按A,C,B,A……通电,电机就反转。 由此可见:电机的位置和速度由导电次数(脉冲数)和频率成一一对应关系。而方向由导电顺序决定。 不过,出于对力矩、平稳、噪音及减少角度等方面考虑。往往采用A-AB-B-BC-C-CA-A这种导电状态,这样将原来每步1/3て改变为1/6て。甚至于通过二相电流不同的组合,使其1/3て变为1/12て,1/24て,这就是电机细分驱动的基本理论依据。 不难推出:电机定子上有m相励磁绕阻,其轴线分别与转子齿轴线偏移1/m,2/m……(m-1)/m,1。并且导电按一定的相序电机就能正反转被控制——这是步进电机旋转的物理条件。只要符合这一条件我们理论上可以制造任何相的步进电机,出于成本等多方面考虑,市场上一般以二、三、四、五相为多。 3、力矩: 电机一旦通电,在定转子间将产生磁场(磁通量Ф)当转子与定子错开一定角度产生力 F与(dФ/dθ)成正比 其磁通量Ф=Br*S ;Br为磁密;S为导磁面积; F与L*D*Br成正比;L为铁芯有效长度;D为转子直径;Br=N·I/RN·I为励磁绕阻安匝数(电流乘匝数)R为磁阻。 力矩=力*半径力矩与电机有效体积*安匝数*磁密成正比(只考虑线性状态) 因此,电机有效体积越大,励磁安匝数越大,定转子间气隙越小,电机力矩越大,反之亦然。 (二)感应子式步进电机 步进电机驱动电路设计 摘要 随着数字化技术发展,数字控制技术得到了广泛而深入的应用。步进电机是一种将数字信号直接转换成角位移或线位移的控制驱动元件, 具有快速起动和停止的特点。因为步进电动机组成的控制系统结构简单,价格低廉,性能上能满足工业控制的基本要求,所以广泛地应用于手工业自动控制、数控机床、组合机床、机器人、计算机外围设备、照相机,投影仪、数码摄像机、大型望远镜、卫星天线定位系统、医疗器件以及各种可控机械工具等等。直流电机广泛应用于计算机外围设备( 如硬盘、软盘和光盘存储器) 、家电产品、医疗器械和电动车上, 无刷直流电机的转子都普遍使用永磁材料组成的磁钢, 并且在航空、航天、汽车、精密电子等行业也被广泛应用。在电工设备中的应用,除了直流电磁铁(直流继电器、直流接触器等)外,最重要的就是应用在直流旋转电机中。在发电厂里,同步发电机的励磁机、蓄电池的充电机等,都是直流发电机;锅炉给粉机的原动机是直流电动机。此外,在许多工业部门,例如大型轧钢设备、大型精密机床、矿井卷扬机、市内电车、电缆设备要求严格线速度一致的地方等,通常都采用直流电动机作为原动机来拖动工作机械的。直流发电机通常是作为直流电源,向负载输出电能;直流电动机则是作为原动机带动各种生产机械工作,向负载输出机械能。在控制系统中,直流电机还有其它的用途,例如测速电机、伺服电机等。他们都是利用电和磁的相互作用来实现向机械能能的转换。 介绍了步进电机和直流电机原理及其驱动程序控制控制模块,通过AT89S52单片机及脉冲分配器(又称逻辑转换器)L298完成步进电机和直流电机各种运行方式的控制。实现步进电机的正反转速度控制并且显示数据。整个系统采用模块化设计,结构简单、可 西门子S系列P L C控制步进电机进行正反转 的方法 SANY标准化小组 #QS8QHH-HHGX8Q8-GNHHJ8-HHMHGN# 1、主程序先正转,等到正转完了就中断,中断中接通个辅助触点(),当闭合,住程序中的反转开始运做。这样子就OK了。 2、用PTO指令让 OR 高速脉冲,另一个点如做方向信号,就可以控制正反转了,速度快慢就要控制输出脉冲周期了,周期越短速度越快,如果你速度很快的话请考虑缓慢加速,不然它是启动不了的,如果方向也变的快的话就要还做一个缓慢减速,不然它振动会蛮厉害,而且也会失步。 3、程NETWORK 1 // 用于单段脉冲串操作的主程序(PTO) // 首次扫描时,将映像寄存器位设为低 // 并调用子程序0 LD R 1 CALL SBR_0 NETWORK 1 // 子程序0开始 LD MOVB 16#8D SMB67 // 设置控制字节: // - 选择PTO操作 // - 选择单段操作 // - 选择毫秒增加 // - 设置脉冲计数和周期数值 // - 启用PTO功能 MOVW +500 SMW68 // 将周期设为500毫秒。 MOVD +4 SMD72 // 将脉冲计数设为4次脉冲。 ATCH INT_0 19 // 将中断例行程序0定义为 // 处理PTO完成中断的中断。 ENI // 全局中断启用 PLS 0 // 激活PTO操作,PLS0 =》 MOVB 16#89 SMB67 // 预载控制字节,用于随后的 // 周期改动。 NETWORK 1 // 中断0开始 // 如果当前周期为500毫秒: // 将周期设为1000毫秒,并生成4次脉冲 LDW= SMW68 +500 MOVW +1000 SMW68 PLS 0 CRETI NETWORK 2 // 如果当前周期为1000毫秒: // 将周期设为500毫秒,并生成4次脉冲 LDW= SMW68 +1000 MOVW +500 SMW68 PLS 0序注释 艾驰商城是国内最专业的MRO工业品网购平台,正品现货、优势价格、迅捷配送,是一站式采购的工业品商城!具有10年工业用品电子商务领域研究,以强大的信息通道建设的优势,以及依托线下贸易交易市场在工业用品行业上游供应链的整合能力,为广大的用户提供了传感器、图尔克传感器、变频器、断路器、继电器、PLC、工控机、仪器仪表、气缸、五金工具、伺服电机、劳保用品等一系列自动化的工控产品。 如需进一步了解相关PLC产品的选型,报价,采购,参数,图片,批发等信息,请关注艾驰商城。 基于单片机的步进电机驱动控制 一、步进电机概述 1.步进电机的定义 步进电机指的是以数字脉冲信号作为电机线或教位移的控制信号,并以数字脉冲频率对电机的转速进行控制的动力控制系统。 在负载正常范围的情况下,步进电机的运行状态只和数字脉冲发生器提供的信号的频率和脉冲占空比有关,一般情况下,电机的状态不受负载的影响。电机的运行角度只和每次所给予的脉冲信号强度有关,而电机的运行速度也只和脉冲信号的频率有直接关 系。这种采用弱点控制强电的控制方式使得步进电机在速度、位移等控制领域有着普通电机不能比拟的优势。 2.驱动控制系统框图 步进电机控制系统有着精确控制、运行稳定的特性,这一其他电机不能比拟的优势使得步进电机得到了广泛的应用。而一般对步进电机控制系统的驱动必须要包含脉冲信 号发生部分,功放部分和驱动控制部分等几个模块电路,我们根据这些通过的模块电路,可将步进电机控制系统的通用框图绘制如下: 在上图的步进电机驱动控制系统方框图中,控制步进电机运行状态的脉冲信号一 般由集成芯片产生,可以是单片机、等智能芯片,也可以是一般的数字电路集成芯片。信号分配环节则要根据步进电机的型号来选择,如四相步进电机有四相四拍和四相 八拍种信号分配的方式;两相步进电机有两相四拍和八拍等脉冲加载形式。功放部分 在驱动环节上显得尤为重要。动态平均电流是步进电机转矩大小的决定因素,前提条件 是电机的速度。电机力矩与平均电流成正比,驱动系统对电机的反电势消弱越多,则平 均电流就越大。 我们一般可以用恒压和恒压串电阻的方法来驱动,或者在条件允许的情况下我们可以用高低压驱动、恒流和细分数等方法来驱动实际的应用过程种,多采用数字集成驱 动芯片作为步进电机的驱动手段。 二、现阶段国内外步进电机驱动的常用方式 1.变频器控制方式 使用变频器对步进电机进行驱动控制时,可以很好的解决步进电机在启动和停止时 容易失步的问题,提高了系统的控制精度。但是变频器的应用成本较高,结构和操作也 比较复杂,无形中提高步进电机的控制难度。 2.PLC控制方式 使用ABB、西门子、欧姆龙等国际知名生产制造商研发的系列产品可以 实现对步进电机的理想化控制,但是基于核心的步进电机控制系统成本高昂,且 难以实现精确控制,在本系统中不太适合。 3.单片机控制方式 随着嵌入式系统在工业控制领域中的广泛应用,以单片机特别是系列单片机 作为控制核心的步进电机控制电路在生产生活领域得到了普及,单片机有着大规模数字 以下是中国步进电机网对步进电机驱动系统所做的较为完整的表述: 1、系统常识: 步进电机和步进电机驱动器构成步进电机驱动系统。步进电机驱动系统的性能,不但取决于步进电机自身的性能,也取决于步进电机驱动器的优劣。对步进电机驱动器的研究几乎是与步进电机的研究同步进行的。 2、系统概述: 步进电机是一种将电脉冲转化为角位移的执行元件。当步进电机驱动器接收到一个脉冲信号(来自控制器),它就驱动步进电机按设定的方向转动一个固定的角度(称为“步距角”),它 的旋转是以固定的角度一步一步运行的。 3、系统控制: 步进电机不能直接接到直流或交流电源上工作,必须使用专用的驱动电源(步进电机驱动器)。控制器(脉冲信号发生器)可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的;同时可以通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。 4、用途: 步进电机是一种控制用的特种电机,作为执行元件,是机电一体化的关键产品之一,随着微电子和计算机技术的发展(步进电机驱动器性能提高),步进电机的需求量与日俱增。步进电机在运行中精度没有积累误差的特点,使其广泛应用于各种自动化控制系统,特别是开环控制系统。 5、步进电机按结构分类: 步进电机也叫脉冲电机,包括反应式步进电机(VR)、永磁式步进电机(PM)、混合式步进电机(HB)等。 (1)反应式步进电机: 也叫感应式、磁滞式或磁阻式步进电机。其定子和转子均由软磁材料制成,定子上均匀分布的大磁极上装有多相励磁绕组,定、转子周边均匀分布小齿和槽,通电后利用磁导的变化产生转矩。一般为三、四、五、六相;可实现大转矩输出(消耗功率较大,电流最高可达20A,驱动电压较高);步距角小(最小可做到六分之一度);断电时无定位转矩;电机内阻尼较小,单步运行(指脉冲频率很低时)震荡时间较长;启动和运行频率较高。 (2)永磁式步进电机: 通常电机转子由永磁材料制成,软磁材料制成的定子上有多相励磁绕组,定、转子周边没有小齿和槽,通电后利用永磁体与定子电流磁场相互作用产生转矩。一般为两相或四相;输出转矩小(消耗功率较小,电流一般小于2A,驱动电压12V);步距角大(例如7.5度、15度、22.5度等);断电时具有一定的保持转矩;启动和运行频率较低。 (3)混合式步进电机: 也叫永磁反应式、永磁感应式步进电机,混合了永磁式和反应式的优点。其定子和四相反应式步进电机没有区别(但同一相的两个磁极相对,且两个磁极上绕组产生的N、S极性必须相同),转子结构较为复杂(转子内部为圆柱形永磁铁,两端外套软磁材料,周边有小齿和槽)。一般为两相或四相;须供给正负脉冲信号;输出转矩较永磁式大(消耗功率相对较小);步距角较永磁式小(一般为1.8度);断电时无定位转矩;启动和运行频率较高;是目前发展较快的一种步进电机。 6、步进电机按工作方式分类:可分为功率式和伺服式两种。 (1)功率式:输出转矩较大,能直接带动较大负载(一般使用反应式、混合式步进电机)。(2)伺服式:输出转矩较小,只能带动较小负载(一般使用永磁式、混合式步进电机)。 7、步进电机的选择: (1)首先选择类型,其次是具体的品种与型号。 四相步进电机驱动电路及驱动程序设计 我们用一个单片机控制多个步进电机指挥跳舞机器人的双肩、双肘和双脚伴着音乐做出各种协调舒缓充满感情的动作,荣获一等奖。电路采用74373锁存,74LS244和ULN2003作电压和电流驱动,单片机(Atc52)作脉冲序列信号发生器。程序设计基于中断服务和总线分时利用方式,实时更新各个电机的速度、方向。整个舞蹈由运动数据所决定的一截截动作无缝连接而成。本文主要介绍一下这个机器人的四相五线制步进电机驱动电路及程序设计. 1、步进电机简介 步进电机根据内部线圈个数不同分为二相制、三相制、四相制等。本文以四相制为例介绍其内部结构。图1为四相五线制步进电机内部结构示意图。 2、四相五线制步进电机的驱动电路 电路主要由单片机工作外围电路、信号锁存和放大电路组成。我们利用了单片机的I/O端口,通过74373锁存,由74LS244驱动,ULN2003对信号进行放大。8个电机共用4bit I/O端口作为数据总线,向电机传送步进脉冲。每个电机分配1bit的I/O端口用作74373锁存信号,锁存步进电机四相脉冲,经ULN2003放大到12V驱动电机运转。 电路原理图(部分)如图2所示。 (1)Intel 8051系列单片机是一种8位的嵌入式控制器,可寻址64K字节,共有32个可编程双向I/O口,分别称为P0~P3。该系列单片机上集成8K的ROM,128字节RAM可供使用。 (2)74LS244为三态控制芯片,目的是使单片机足以驱动ULN2003。 ULN2003是常用的达林顿管阵列,工作电压是12V,可以提供足够的电流以驱动步进电机。关于这些芯片的详细介绍可参见它们各自的数据手册。 (3)74373是电平控制锁存器,它可使多个步进电机共用一组数据总线。我们用P1.0~P1.7作为8个电机的锁存信号输出端,见表1。 这是一种基于总线分时复用的方式,以动态扫描的方式来发送控制信号,这和高级操作系统里的多任务进程调度的思想一致。这种方法明显的好处是节省I/O口,使系统可以控制更多的步进电机。本电路设计为控制8个。 3 、程序设计 传统的步进电机驱动程序利用简单的条件循环来发送脉冲序列,但当电机数目发生变化时,编程繁杂,冗余代码较多,难以做到信号占空比一致,进而产生“抖动” 现象。下面提出一种基于中断服务方式,面向舞蹈动作,可实时改变各个电机速度和方向(每200ms可改变一次)的程序设计方法。 3.1 速度归一化和线性关系 我们将速度量化成一个-128~127内可变的数,正号代表正转,负号代表返转,称之归一化速度(-128~127为一个字节)。给每个电机分 51单片机控制四相步进电机 2009年07月21日星期二 12:44 51单片机控制四相步进电机 2009-03-01 18:53 接触单片机快两年了,不过只是非常业余的兴趣,实践却不多,到现在还算是个初学者吧。这几天给自己的任务就是搞定步进电机的单片机控制。以前曾看过有关步进电机原理和控制的资料,毕竟自己没有做过,对其具体原理还不是很清楚。今天从淘宝网买了一个EPSON的UMX-1型步进电机,此步进电机为双极性四相,接线共有六根,外形如下 图所示: 详细内容: https://www.doczj.com/doc/d28313116.html,/31907887_d.h tml 拿到步进电机,根据以前看书对四相步进电机的了解,我对它进行了初步的测试,就是将5伏电源的正端接上最边上两根褐色的线,然后用5伏电源的地线分别和另外四根线(红、兰、白、橙)依次接触,发现每接触一下,步进电机便转动一个角度,来回五次,电机刚好转一圈,说明此步进电机的步进角度为360/(4×5)=18度。地线与四线接触的顺序相反,电机的转向也相反。 如果用单片机来控制此步进电机,则只需分别依次给四线一定时间的脉冲电流,电机便可连续转动起来。通过改变脉冲电流的时间间隔,就可以实现对转速的控制;通过改变给四 线脉冲电流的顺序,则可实现对转向的控制。所以,设计了如下电路图: C51程序代码为: 代码一 #include 51单片机控制的步进电机C语言程序
_单片机控制步进电机驱动原理___驱动图
基于单片机ATS控制步进电机正反转
单片机控制步进电机和数码管显示
步进电机驱动控制系统设计(有程序)
步进电机驱动方式的分类及比较
步进电机启动停止正反转控制程序的汇编语言的实现
步进电机程序编写及说明
基于51单片机控制步进电机
步进电机工作原理、驱动控制系统与选型
步进电机驱动电路设计
西门子S系列PLC控制步进电机进行正反转的方法
基于单片机的步进电机驱动控制
步进电机驱动芯片选型指南
四相步进电机驱动电路及驱动程序设计
51单片机控制四相步进电机解析
相关主题
文本预览