收稿日期:2003-03-31;收修定稿日期:2003-05-21
作者简介:李界家(1957-),男,辽宁盖州人,教授,硕士,主要从事智能控制、智能建筑技术、故障诊断技术等方面的教学与科研工作。
控制工程C o n t r o l E n g i n e e r i n g =============================================================
o f C h i n a J a n .2004
V o l .11,N o .12004年1月第11卷第1期文章编号:1671-7848(2004)01-0014-03
参数自调整模糊控制在炉温控制中的应用
李界家,付
萍,片锦香,马
斌
(沈阳建筑工程学院信息与控制工程学院,辽宁沈阳110168
)摘要:介绍了一种用于炉温控制系统中基于参数自调整的单片机模糊控制器。给
出了参数自调整的原则、模糊控制算法,阐述了单片机参数自调整模糊控制器的工作原理、特点以及其软件和硬件的组成,并通过仿真实验与常规P I D 控制对此,结果表明了电加热炉炉温控制系统具有无超调、响应快、调节时间短等较高的控制精度和良好的动态品质及鲁棒性,从而证明了该模糊控制算法对电加热炉控制的有效性。关键词:模糊控制;参数自调整;电加热炉;单片机
中图分类号:T P273
文献标识码:A 1引
言
随着科学技术的发展和工业生产水平的提高,电加热炉在冶金、化工、机械等各类工业控制中得到了广泛应用,并且在国民经济中占有举足轻重的地位。由于电加热炉温度控制具有非线性、大滞后、大惯性、时变性、升温单向性等特点,很难用数学方法建立精确的数学模型,因此用传统的控制理论和方法很难达到好的控制效果。
模糊控制技术不依赖于精确的数学模型,对参数的变化不敏感,适应性强,具有很好的鲁棒性。但是常规的模糊控制器也存在一些不足,人的主观因素占的比例较大(模糊控制规则由人的经验确定),可能满足不了复杂的生产过程的需要。电加热炉温控系统要求响应速度快,稳态精度高,一般的模糊控制器难以胜任。
本文介绍一种基于参数自调整模糊控制器:即通过在线调整参数改善系统的响应速度,提高精度,保持系统的控制指标。将它用于电加热炉的温控系统中,仿真及实验结果表明,参数自调整模糊控制器可以提高系统的动、静态性能,从而对电加热炉进行有效的控制。
2参数自调整模糊控制系统结构与工作
原理
由于控制系统在控制的各个阶段呈现出不同的特点,故应对不同的阶段实施不同的控制策略。
常规的模糊控制器是在特定的条件下设计的,因而要取得更高的控制性能,必须采取合理的改善措施。模糊控制器中量化因子k e ,k e c 和比例因子
k u 对控制器有很大的控制作用。因此在不同的
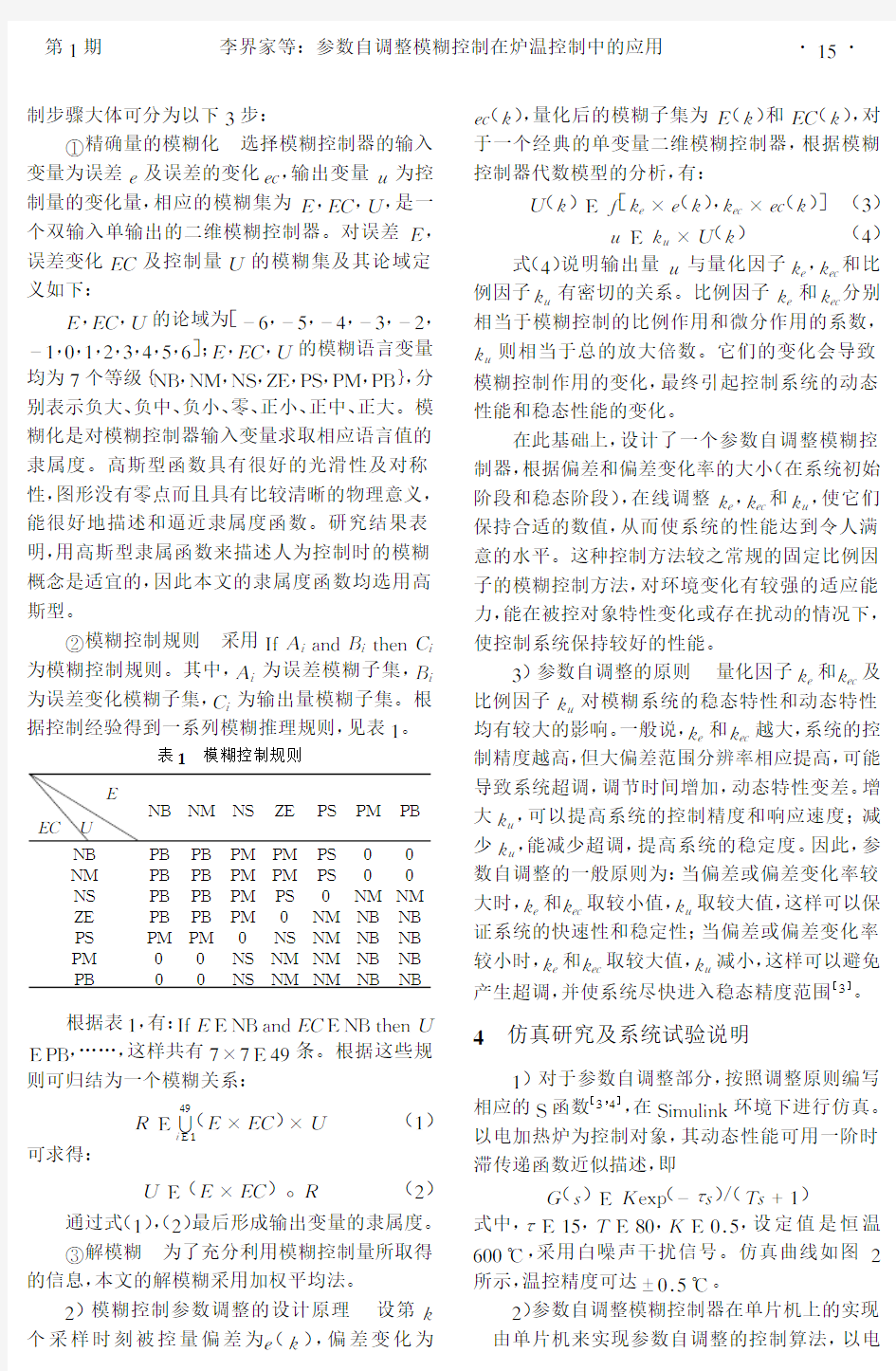
阶段调整它们的大小可提高控制系统的功能。参数自调整模糊控制系统结构如图1所示。
图1参数自调整模糊控制系统结构
参数自调整模糊控制系统的工作原理为:首先选择一个模糊推理结构,包括输入输出数量和隶属度函数,建立完善的模糊推理规则。以温度偏差和偏差变化量作为模糊控制的输入量,通过模糊推理进行决策判断,输出控制量来控制被控对象。通过热电偶检测到的电加热炉输出温度与给定温度进行比较,得出温度偏差量e 和偏差变化量Δe E d e /d
t ,接着进行尺度变换,变换到各自的论域范围。其中k e ,k e c 是量化因子,k u 是比例因子。通过在线调节k e ,k e c 和k u ,对电阻炉实现精确、有效的控制。
3参数自调整模糊控制算法
1
)基本模糊控制算法[1,2]
模糊控制器的控
制步骤大体可分为以下3步:
①精确量的模糊化选择模糊控制器的输入
变量为误差e 及误差的变化e c ,输出变量u 为控制量的变化量,相应的模糊集为E ,E C ,U ,
是一个双输入单输出的二维模糊控制器。对误差E ,误差变化E C 及控制量U 的模糊集及其论域定义如下:
E ,E C ,U 的论域为[-6,-5,-4,-3,-2
,-1,0,1,2,3,4,5,6];E ,E C ,U 的模糊语言变量均为7个等级{N B ,N M ,N S ,Z E ,P S ,P M ,P B },分别表示负大、负中、负小、零、正小、正中、正大。模糊化是对模糊控制器输入变量求取相应语言值的隶属度。高斯型函数具有很好的光滑性及对称性,图形没有零点而且具有比较清晰的物理意义,能很好地描述和逼近隶属度函数。研究结果表明,用高斯型隶属函数来描述人为控制时的模糊概念是适宜的,因此本文的隶属度函数均选用高斯型。
②模糊控制规则采用I f A i a n d B i t h e n C i 为模糊控制规则。其中,A i 为误差模糊子集,B i 为误差变化模糊子集,C i 为输出量模糊子集。根据控制经验得到一系列模糊推理规则,见表1。
表1模糊控制规则
E C U
E
N B N M N S Z E P S P M P B N B
P B
P B P M P M
P S 00
N M P B P B P M P M P S 00N S P B P B P M P S 0N M N M Z E P B P B P M 0N M N B N B P S P M P M 0N S N M N B N B P M 00N S N M N M N B N B P B
N S
N M
N M
N B
N B
根据表1,有:I f E EN B a n d E C EN B t h e n U
E P B ,……,这样共有7*7E 49条。根据这些规则可归结为一个模糊关系:
R E U 49
i E
1(E *E C )*U
(1)可求得:
U E (E *E C )oR
(2
)通过式(1),(2
)最后形成输出变量的隶属度。③解模糊为了充分利用模糊控制量所取得的信息,本文的解模糊采用加权平均法。2
)模糊控制参数调整的设计原理设第k 个采样时刻被控量偏差为e
(k ),偏差变化为e c (k ),量化后的模糊子集为E (k )和E C (k )
,对于一个经典的单变量二维模糊控制器,根据模糊控制器代数模型的分析,有:
U (k )E f [k e *e (k ),k e c *e c (k )](3)u E k u *U (k )(4)式(4)说明输出量u 与量化因子k e ,k e c 和比例因子k u 有密切的关系。比例因子k e 和k e c 分别相当于模糊控制的比例作用和微分作用的系数,k u 则相当于总的放大倍数。它们的变化会导致模糊控制作用的变化,最终引起控制系统的动态性能和稳态性能的变化。
在此基础上,设计了一个参数自调整模糊控制器,根据偏差和偏差变化率的大小(在系统初始阶段和稳态阶段),在线调整k e ,k e c 和k u ,使它们保持合适的数值,从而使系统的性能达到令人满意的水平。这种控制方法较之常规的固定比例因子的模糊控制方法,对环境变化有较强的适应能力,能在被控对象特性变化或存在扰动的情况下,使控制系统保持较好的性能。
3)参数自调整的原则量化因子k e 和k e c 及比例因子k u 对模糊系统的稳态特性和动态特性均有较大的影响。一般说,k e 和k e c 越大,系统的控制精度越高,但大偏差范围分辨率相应提高,可能导致系统超调,调节时间增加,动态特性变差。增
大k u ,
可以提高系统的控制精度和响应速度;减少k u ,能减少超调,提高系统的稳定度。因此,参数自调整的一般原则为:当偏差或偏差变化率较大时,k e 和k e c 取较小值,k u 取较大值,这样可以保证系统的快速性和稳定性;当偏差或偏差变化率较小时,k e 和k e c 取较大值,k u 减小,
这样可以避免产生超调,并使系统尽快进入稳态精度范围
[3]。4仿真研究及系统试验说明
1
)对于参数自调整部分,按照调整原则编写相应的S 函数[3,4],在S i m u l i n k 环境下进行仿真。以电加热炉为控制对象,其动态性能可用一阶时滞传递函数近似描述,即
G (s )E K e x p
(-τs )/(T s +1)式中,τE15,T E80,K E0.5
,设定值是恒温600?,
采用白噪声干扰信号。仿真曲线如图2所示,温控精度可达+0.5?。
2)参数自调整模糊控制器在单片机上的实现由单片机来实现参数自调整的控制算法,以电
?
51?第1期
李界家等:参数自调整模糊控制在炉温控制中的应用
加热炉为控制对象,进行物理模拟试验。系统的硬件组成及工作原理如图3所示。
图2仿真曲线图
图3炉温控制原理图
89C 51型单片机模糊控制器是系统的核心,
它由硬件和软件配合协同工作。系统采用镍铬热电偶作为温度传感器,其检测温度为0~
1300?,对应输出为0~52.37m V 。采用D B W 型温度变送器,把热电偶输出的m V 信号转变为0~5V 标准模拟信号。该信号经A /D (12位)
转换成数字信号,送入单片机。单片机根据实际检测信号与给定信号比较发出控制信号,经D /A (12位)转换成0~5V 模拟信号,此0~5V 的模拟信号对应可控硅触发器的0~100%触发,触发可控硅的导通角以改变电阻炉的电热功率。控制系统软件主要由主程序、显示子程序、A /D 转换
(数据采集)子程序、温度设定调节子程序、按键中断服务子程序、定时器中断服务子程序、打印子程序、参数自调整模糊推理子程序、D /A 转换子程序等组成(用C 语言编程)。控温点在600?的实时控制响应曲线如图4所示。
图4炉温实时控制响应曲线
6结
语
本文介绍的参数自调整模糊控制,由于系统可以自动根据实际情况进行在线调整,因而具有良好的动、静态性能,仿真及实验结果也证明了此算法的有效性。这种高鲁棒性、高精度、响应快速的控制系统必将会给电加热炉的发展带来巨大的推动作用。参考文献:
[1]章正斌,吴汝善,于健.模糊控制工程[M ].重庆:
重庆大学出版社,1996.
[2]孙增圻.智能控制理论与技术[M ].北京:
清华大学出版社,1997.
[3]罗文广,韩峻峰,兰红莉.基于M a t l a b (S i m u l i n k
)语言的模糊控制系统高效仿真[J ].
计算机仿真,2001,18(3):14-16.
[4]孔峰,罗文广.一种基于模糊控制的单片机电机调
速系统[J ].广西工学院学报,2001,12(1):44-47.
A p p l i c a t i o n o f P a r a m e t e r S e l f -r e g u l a t i o nF u z z y C
o n t r o l t o t h eT e m p
e r a t u r eC o n t r o l o
f t h e F u r n a c e L I J i e -j i a ,F UP i n
g ,P I A NJ i n -x i a n g ,M AB
i n (C o l l e g e o f I n f o r m a t i o n&C o n t r o l E n g i n e e r i n g ,S h e n y a n g I n s t i t u t e o f A r c h i t e c t u r a l a n dC i v i l E n g i n e e r i n g ,S h e n y a n g 1
10168,C h i n a )A b s t r a c t :Ak i n d o f p a r a m e t e r s e l f -r e g u l a t i o n f u z z y c o n t r o l l e r u s e d i n t h e t e m p e r a t u r e c o n t r o l s y
s t e mo f f u r n a c e i s i n t r o d u c e d .T h e p r i n c i p l e o f t h e p a r a m e t e r s e l f -r e g u l a t i o n i s p r e s e n t e d a n d a f u z z y c o n t r o l a l g o r i t h m i s g i v e n .T h ew o r k p r i n c i p
l e s ,t h e c h a r -a c t e r i s t i c s ,a n d t h e c o m p o s i t i o n s o f s o f t w a r e a n d h a r d w a r e o f t h e p a r a m e t e r s e l f -r e g u l a t i o n f u z z y c o n t r o l l e rw i t h s i n g l e -c h i p m
i -c r o c o m p u t e r a r e d i s c u s s e d .I t s h o w s b y s i m u l a t i o n t h a t t h e t e m p e r a t u r e c o n t r o l s y s t e mo f e l e c t r i c a l l y h e a t i n g f u r n a c e i s o fm o r e c o n t r o l a c c u r a c y a n d a g o o d d y n a m i c c h a r a c t e r i s t i c a n d a g o o d p r o p e r t y o
f r o b u s t .K e y w
o r d s :f u z z y c o n t r o l ;p a r a m e t e r s e l f -r e g u l a t i o n ;e l e c t r i c a l l y h e a t i n g f u r n a c e ;s i n g l e -c h i p m i c r o c o m p u t e r ?
61?控制工程
第11卷
模糊控制的应用 学院实验学院 专业电子信息工程 姓名 指导教师黄静 日期 2011 年 9 月 20 日
在自动控制中,包括经典理论和现代控制理论中有一个共同的特点,即控制器的综合设计都要建立在被控对象准确的数学模型(如微分方程等)的基础上,但是在实际工业生产中,很多系统的影响因素很多,十分复杂。建立精确的数学模型特别困难,甚至是不可能的。这种情况下,模糊控制的诞生就显得意义重大,模糊控制不用建立数学模型,根据实际系统的输入输出的结果数据,参考现场操作人员的运行经验,就可对系统进行实时控制。模糊控制实际上是一种非线性控制,从属于智能控制的范畴。现代控制系统中的的控制能方便地解决工业领域常见的非线性、时变、在滞后、强耦合、变结构、结束条件苛刻等复杂问题。可编程控制器以其高可靠性、编程方便、耐恶劣环境、功能强大等特性很好地解决了工业控制领域普遍关心的可靠、安全、灵活、方便、经济等问题,这两者的结合,可在实际工程中广泛应用。 所谓模糊控制,其定义是是以模糊数学作为理论基础,以人的控制经验作为控制的知识模型,以模糊集合、模糊语言变量以及模糊逻辑推理作为控制算法的一种控制。模糊控制具有以下突出特点: (1)模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是现 场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用 (2)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对 那些数学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。 (3)基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同,容易 导致较大差异;但一个系统语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折中的选择,使控制效果优于常规控制器。 (4)模糊控制是基于启发性的知识及语言决策规则设计的,这有利于模拟人工控 制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。(5)模糊控制系统的鲁棒性强,干扰和参数变化对控制效果的影响被大大减弱, 尤其适合于非线性、时变及纯滞后系统的控制。 由于有着诸多优点,模糊理论在控制领域得到了广泛应用。下面我们就以下示例介绍模糊控制在实际中的应用: 电机调速控制系统见图1,模糊控制器的输入变量为实际转速与转速给定值 ,输出变量为电机的电压变化量u。图2为电机调试之间的差值e及其变化率e c 输出结果,其横坐标为时间轴,纵坐标为转速。当设定转速为2 000r/s时,电机能很快稳定运行于2 000r/s;当设定转速下降到1 000r/s时,转速又很快下降到1 000r/s稳定运行。
一、速度控制算法: 首先定义速度偏差-50 km/h ≤e (k )≤50km/h ,-20≤ec (i )= e (k )- e (k-1)≤20,阀值e swith =10km/h 设计思想:油门控制采用增量式PID 控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。 选择规则: e (k )<0 ① e (k )>- e swith and throttlr_1≠0 选择油门控制 ② 否则:先将油门控制量置0,再选择刹车控制 0 物理与电子工程学院 《人工智能》 课程设计报告 课题名称关于模糊控制理论的综述 专业自动化 班级 11级3班 学生姓名郑艳伟 学号 指导教师崔明月 成绩 2014年6月18日 关于模糊控制理论的综述 摘要:模糊控制方法是智能控制的重要组成部分,本文简要回顾了模糊控 制理论的发展,详细介绍了模糊控制理论的原理和模糊控制器的设计步骤, 分析了模糊控制理论的优缺点以及模糊控制需要完善或继续研究的内容,根 据各种模糊控制器的不同特点,对模糊控制在电力系统中的应用进行了分 类,并分析了各类模糊控制器的应用效能.最后,展望了模糊控制的发展趋 势与动态. 关键词:模糊控制;模糊控制理论;模糊控制系统;模糊控制理论的发展模糊控制是以模糊集理论、模糊语言变量和模糊控制逻辑推理为基础的一种智能控制方法,从行为上模拟人的思维方式,对难建模的对象实施模糊推理和决策的一种控制方法.模糊控制作为智能领域中最具有实际意义的一种控制方法,已经在工业控制领域、电力系统、家用电器自动化等领域中解决了很多的问题,引起了越来越多的工程技术人员的兴趣. 模糊控制系统简介 模糊控制系统是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术.1965年美国的扎德[1]创立了模糊集合论, 1973 年, 他给出了模糊逻辑控制的定义和相关的定理.1974 年英国的Mamdani 首先用模糊控制语句组成模糊控制器,并把它用于锅炉和蒸汽机的控制, 在实验室获得成功, 这一开拓性的工作标志着模糊控制论的诞生. 模糊控制系统主要是模拟人的思维、推理和判断的一种控制方法, 它将人的经验、常识等用自然语言的形式表达出来, 建立一种适用于计算机处理的输入输出过程模型, 是智能控制的一个重要研究领域.从信息技术的观点来看, 模糊控制是一种基于规则的专家系统.从控制系统技术的观点来看, 模糊控制是一种普遍的非线性特征域控制器. 相对传统控制, 包括经典控制理论与现代控制理论.模糊控制能避开对象的数学模型(如状态方程或传递函数等) , 它力图对人们关于某个控制问题的成功与失败和经验进行加工, 总结出知识, 从中提炼出控制规则, 用一系列多维模糊条件语句构造系统的模糊语言变量模型, 应用CRI 等各类模糊推理方法, 一、速度控制算法: 欧阳歌谷(2021.02.01) 首先定义速度偏差-50 km/h≤e(k)≤50km/h,-20≤ec(i)=e(k)-e(k-1)≤20,阀值eswith=10km/h 设计思想:油门控制采用增量式PID控制算法,刹车控制采用模糊控制算法,最后通过选择规则进行选择控制量输入。 选择规则: e(k)<0 ①e(k)>-eswith and throttlr_1≠0 选择油门控制 ②否则:先将油门控制量置0,再选择刹车控制 0 E/EC和U取相同的隶属度函数即: 说明:边界选择钟形隶属度函数,中间选用三角形隶属度函数,图像略 实际EC和E输入值若超出论域范围,则取相应的端点值。 3.模糊控制规则 由隶属度函数可以得到语言值隶属度(通过图像直接可以看出)如下表: 表1:E/EC和U语言值隶属度向量表 设置模糊规则库如下表: 表2:模糊规则表 3.模糊推理 由模糊规则表3可以知道输入E与EC和输出U的模糊关系,这里我取两个例子做模糊推理如下: if (E is NB) and (EC is NM) then (U is PB) 那么他的模糊关系子矩阵为: 84 |电气时代 2005年第4期 EA 应用与方案工业控制 k i =k i '+{ei , eci }i k d =k d '+{ei , eci }d 在线运行过程中, 控制系统通过对模糊逻辑规则的结果处理、查表和运算, 完成对PID参数的在线自校正。 用在线整定的PID参数 k p , k i 和 k d 就可以根据下列PID控制算法的离散差分公式计算出控制量 u : 位置式 u k =k p E k +k i E k +k d (E k -E k-1 增量式Δ u k =k p (E k -E k-1+ k i E k +K d (E k -2E k-1+E k-2 根据系统在受控过程中对应不同的|e |和|ec |, 将 PID参数的整定原则归纳如下 : 1当|e |较大时, 取较大的 k P 与较小的 k d , 使系统具有 较好的跟踪性能, 同时为避免出现较大的超调, 应对积分作用加以限制, 通常取k i =0。 2当|e |处于中等大小时, 为使系统响应超调较小, k P 应取较小些。该情况下, k d 的取值对系统响应影响较大, k i 的取值要适当。 3当|e |较小时, 为使系统具有较好的稳定性, k p 与 k i 均应取大些, 同时为避免系统在设定值附近出现振荡, k d 值的选择根据|ec |值较大时, k d 取较小值, 通常 k d 为中等大小。 控制器的设计及仿真试验 (1要求 设被控对象为三阶系统 采样时间为4ms, 分别采用参数模糊自整定PID控制和常规PID控制进行阶跃响应, 在第250个采样时刻控制器输出加1.0的干扰, 比较仿真结果。 (2模糊控制器设计 输入为偏差 e 和偏差变化率 ec , 输出变量为PID的三个参 在 工业生产过程中, 许多被控对象随着负荷变化或干扰因素的影响, 其对象的特性参数或结构发生改变。自 适应控制运用现代控制理论在线辨识对象特征参数, 实时改变其控制策略, 使控制系统品质指标保持在最佳范围内, 但其控制效果的好坏取决于辨识模型的精确度, 这对于复杂系统是非常困难的。因此, 在工业生产过程中, 大量采用的仍然是PID算法, PID参数的整定方法很多, 但大多数都以对象特性为基础。 参数模糊自整定PID控制原理 参数模糊自整定PID控制器结构如图1所示。 其原理是先找出PID的3个参数与偏差 e 和偏差变化率 ec 之间的模糊关系, 在运行中通过实时检测 e 和 ec , 再根据模糊控制原理来对3个参数进行在线修改, 以满足在不同 e 和 ec 时对控制参数的不同要求, 使被控对象具有良好的动、静态性能, 而且计算量小, 易于用单片机实现。 PID参数的整定必须考虑到在不同时刻三个参数的作用以及相互之间的互联关系。模糊控制器设计的核心是总结工程设计人员的技术知识和实际操作经验, 建立合适的模糊规则表, 得到针对 k p , k i , k d 三个参数分别整定的模糊控制表。再根据各模糊子集的隶属度赋值表和各参数模糊控制模型, 应用模糊合成推理设计PID参数的模糊矩阵表, 查出修正参数代入下式计算 k p =k p '+{ei , eci }p 模糊控制技术发展现状及研究热点 摘要:综合介绍丁模糊控制技术的基本原理和发展状况,重点总结丁近年来该研究领域的热点问题,并对今后的发展前景进行了展望。 关键词:模糊控制结构分析稳定性白适应控制 1模糊控制的热点问题 模糊控制技术是一项正在发展的技术,虽然近年来得到了蓬勃发展,但它也存在一些问题,主要有以下几个方面: (1)还投有形成完挫的理论体系,没有完善的稳定性和鲁棒性分析,系统的设计方法(包括规则的获取和优化、隶属函数的选取等); (2)控制系统的性能小太高(稳态精度牧低,存在抖动及积分饱和等问题): (3)自适应能力有限。目前,国内外众多专家学者围绕着这些问题展开了广泛的研究,取得了一些阶段性成果,下面介绍一下近期的主要研究热点。 2模糊控制系统的稳定性分析 任何一个自动控制系统要正常工作,首先必须是稳定的。由于模糊系统本质上的非线性和缺乏统一的系统描述,使得人们难以利用现有的控制理论和分析方法对模糊控制系统进行分析和设计。因此,模糊控制理论的稳定性分析一直是一个难点课题,未形成较为完善的理论体系。正因为如此,关于模糊系统的稳定性分析近年来成为众人关注的热点,发表的论文较多,提出了各种思想和分析方法。目前模糊控制系统稳定性分析方法主要有以下几种:(1)李亚普诺夫方法 (2)基于滑模变结构系统的稳定性分析方法 (3)描述函数方法 (4)圆稳定性判据方法 模糊控制系统的稳定性分析还有相平面法、关系矩阵分析法、超稳定理论、Popov判据、模糊穴——穴映像、数值稳定性分析方法以及最近出现的鲁棒控制理论分析方法和LMI(矩阵不等式)凸优化方法等。 3自适应模糊控制器的研究 为了提高模糊控制系统的自适应能力,许多学者对自适应模糊控制器进行了研究,研究方向主要集中在以下方面。 (1)自校正模糊控制器 自校正模糊控制器是在常规模糊控制的基础上,采用加权推理决策,并引入协调因子,根据系统偏差e和偏差变化ec的大小,预测控制系统中的不确定量并选择一个最佳的控制参数或控制规则集,在线自动调整保守和大胆控制的混合程度,从而更全面确切地反映出入对诸因素的综合决策思想,提高系统的控制精度和鲁捧性能。目前这种变结构的自校正模糊控制器是根据被调量e和ec在线选取最佳控制规则及控制决策的,而对于一些复杂的生产过程,其生产工艺和环境因素都较为复杂,往往不能只考虑系统的偏差和偏差变化率来确定其控制策略。难于总结出比较完整的经验,此时模糊控制规则或者缺乏,或者很粗糙,并且当被控对象参数发生变化或受到随机干扰影响时,都会影响模糊控制的效果。 (2)自组织模糊控制器 自组织模糊控制器能自动对系统本身的参数或控制规则进行调整,使系统不断完善,以适应不断变化的情况,保证控制达到所希望的效果。它根据自动测量得到的实际输出特征和期望特征的偏差,确定输出响应的校正量并转化控制校正量,调整模糊控制规则,作用于被控对象。其基本特征是:控制算法和规则可以通过在线修改,变动某几个参数可以改变控制结果。它不仅仅是局限于某个对象,而是通过自组织适应几类对象。有代表性为以下三种类型: ①为自校正模糊控制器:在常规模糊控制中增加系统辨别和修正控制功能。通过使用一个较为粗糙的初期模型,经过模糊控制器的自组织功能,达到在线修正模糊控制规则,完善系统性能,使其达到灿期的要求; ②自调整比例因子模糊控制器:通过调整系统偏差及偏差变化率的比例因子来控制模糊控制器中的输出量的比例系数,即改变系统的增益。它充分体现了操作者手动控制的思维特点和控制策略,保证了系统有良好的动态性和稳态精度; ③模糊自整定PID参数控制器:应用模糊集理论,根据系统运行状态,在线整定控制器PID 参数(KP、KI、KD)。由于模糊自整定参数KP、KI,KD与偏差e变化率ec间建立起在线自整定函数关系,且这种关系是根据人的经验和智慧积累起来的,使系统在不同的运动状态下能对 模糊PID 参数自整定 设被控对象为 s s s s G P 1047035.87523500 )(2 3++= 采样时间为1ms ,采样模糊PID 控制进行阶跃响应,在第300个采样时间时控制加的干扰,相应的响应结果如下图: Ki 的录属度函数 Kp 的录属度函数 ) e的录属度函数 ec的录属度函数 下面是系统在外界有干扰输入时普通PID和模糊PID参数自整定控制的阶跃响应曲线: 模糊PID控制阶跃响应 , 普通PID控制阶跃响应 . 从上面的仿真图可以看出,经过模糊PID参数自整定后,在外界干扰输入时,可以得到很好的控制效果。 下面是PID参数的整定曲线:. Kp的自整定调整 Ki的自整定调整 Kd的自整定调整! 程序文本: %Fuzzy Tunning PID Control clear all; close all; a=newfis('fuzzpid'); a=addvar(a,'input','e',[-3,3]); %Parameter e a=addmf(a,'input',1,'NB','zmf',[-3,-1]); a=addmf(a,'input',1,'NM','trimf',[-3,-2,0]); a=addmf(a,'input',1,'NS','trimf',[-3,-1,1]); [ a=addmf(a,'input',1,'Z','trimf',[-2,0,2]); a=addmf(a,'input',1,'PS','trimf',[-1,1,3]); a=addmf(a,'input',1,'PM','trimf',[0,2,3]); a=addmf(a,'input',1,'PB','smf',[1,3]); a=addvar(a,'input','ec',[-3,3]); %Parameter ec a=addmf(a,'input',2,'NB','zmf',[-3,-1]); a=addmf(a,'input',2,'NM','trimf',[-3,-2,0]); a=addmf(a,'input',2,'NS','trimf',[-3,-1,1]); a=addmf(a,'input',2,'Z','trimf',[-2,0,2]); a=addmf(a,'input',2,'PS','trimf',[-1,1,3]); " a=addmf(a,'input',2,'PM','trimf',[0,2,3]); a=addmf(a,'input',2,'PB','smf',[1,3]); a=addvar(a,'output','kp',[,]); %Parameter kp a=addmf(a,'output',1,'NB','zmf',[,]); a=addmf(a,'output',1,'NM','trimf',[,,0]); a=addmf(a,'output',1,'NS','trimf',[,,]); a=addmf(a,'output',1,'Z','trimf',[,0,]); a=addmf(a,'output',1,'PS','trimf',[,,]); a=addmf(a,'output',1,'PM','trimf',[0,,]); a=addmf(a,'output',1,'PB','smf',[,]); 、 a=addvar(a,'output','ki',[,]); %Parameter ki a=addmf(a,'output',2,'NB','zmf',[,]); a=addmf(a,'output',2,'NM','trimf',[,,0]); a=addmf(a,'output',2,'NS','trimf',[,,]); a=addmf(a,'output',2,'Z','trimf',[,0,]); a=addmf(a,'output',2,'PS','trimf',[,,]); a=addmf(a,'output',2,'PM','trimf',[0,,]); 选取一个模糊控制的实例讲解,有文章,有仿真,有详细的推导过程。 一.实验题目:基于模糊控制系统的单级倒立摆 二.实验目的与要求: 倒立摆是联结在小车上的杆,通过小车的运动能保持竖立不倒的一种装置,它是一个典型的非线性、快速、多变量和自然不稳定系统,但是我们可以通过对它施加一定的控制使其稳定。对它的研究在理论上和方法上都有其重要意义。倒立摆的研究不仅要追求增加摆的级数,而且更重要的是如何发展现有的控制方法。同时, 它和火箭的姿态控制以及步行机器 人的稳定控制有很多相似之处,由此研究产生的理论和方法对一般工业过程也有广泛用途。 本文研究了倒立摆的控制机理,用Lagrange 方法推导了一级倒立摆的数学模型,这为研究多级和其它类型的倒立摆甚至更高层次的控制策略奠定了一个良好的基础。对系统进行了稳定性、可控性分析,得出倒立摆系统是一个开环不稳定但可控的系统的结论。 本文主要研究用极点配置、最优控制和模糊控制方法对倒立摆进行稳定控制。最优控制方法是基于状态反馈,但能实现输出指标最优的一种控制方法,方法和参数调节较简单,有着广泛的应用。模糊控制有不依赖于数学模型、适用于非线性系统等优点,所以本文尝试了用模糊控制对倒立摆进行控制,以将先进的控制方法用于实际中。 同时,对倒立摆系统的研究也将遵循从建模到仿真到实控,软硬件结合的系统的控制流程。在这过程中,借助数学工具Matlab7及仿真软件Simulink,作了大量的仿真研究工作,仿真结果表明系统能跟踪输入,并具有较好的抗干扰性。最后对实验室的倒立摆装置进行了软、硬件的调试,获得了较好的控制效果。 三.实验步骤: 1.一级倒立摆系统模型的建立 在忽略了空气阻力、各种摩擦之后(这也是为了保证Lagrange 方程的建立),可 将一级倒立摆系统抽象为由小车和匀质杆组成的系统,本系统设定如下: 小车质量M;摆杆质量m,长为l;小车在x 轴上移动;摆与竖直方向夹角为θ,规定正方向如图所示;加在小车x 轴上的力为F; 模糊控制技术的发展与 前 景 展 望 模糊控制技术发展现状与前景展望 1.引言 人的手动控制策略是通过操作者的学习,实验以及长期经验积累而形成的,他通过人的自然语言来叙述。由于自然语言具有模糊性,所以,这种语言控制也被称为模糊语言控制,简称模糊控制。 近年来,对于经典模糊控制系统稳态性能的改善,模糊集成控制,模糊自适应控制,专家模糊控制与多变量模糊控制的研究,特别是对复杂系统的自学习与参数自调整模糊系统方面的研究,受到各国学者的重视。人们将神经网络和模糊控制技术相结合,形成了一种模糊神经网络技术,他可以组成一组更接近于人脑的智能信息处理系统,其发展前景十分广阔。 2.模糊控制的热点问题 模糊控制技术是一项正在发展的技术,虽然近年来得到了蓬勃发展,但它也存在一些问题,主要有以下几个方面 (1) 还没有有形成完整的理论体系,没有完善的稳定性和鲁棒性分析、系统的设计方法(包括规则的获取和优化、隶属函数的选取等); (2) 控制系统的性能不太高(稳态精度较低,存在抖动及积分饱和等问题); (3) 自适应能力有限。目前,国内外众多专家学者围绕着这些问题展开了广泛的研究,取得了一些阶段性成果,下面介绍一下近期的主要研究热点。 2.1 模糊控制系统的稳定性分析 任何一个自动控制系统要正常工作,首先必须是稳定的。由于模糊系统本质上的非线性和缺乏统一的系统描述,使得人们难以利用现有的控制理论和分析方法对模糊控制系统进行分析和设计,因此,模糊控制理论的稳定性分析一直是一个难点课题,未形成较为完善的理论体系。正因为如此,关于模糊系统的稳定性分析近年来成为众人关注的热点,发表的论文较多,提出了各种思想和分析方法。目前模糊控制系统稳定性分析方法主要有以下几种: (1) 李亚普诺夫方法 基于李亚普诺夫直接方法,许多学者讨论了离散时间和连续时间模糊控制系统的稳定性分析和设计。使用李亚普诺夫线性化方法,Ying建立了包括非 模糊控制技术及其应用 余永权 作者简介:余永权广东工业大学教授、计算机应用研究室主任、Motorola单片机应用研究开发中心主任。1970年毕业于广东工学院自动化专业,一直从事计算机教学及研究工作。70年代初以来,参加了广东省第一台中型计算机的研制,以及矿山计算机监控系统、模糊控制、单片机、模糊家用电器等30多个项目的研究和组织开发。发表论文70余篇,出版了《单片机模糊逻辑控制》等著作5本。1993~1994年,在多伦多大学进行高级控制系统研究,回国后从事单片机控制网络、神经网络、模糊控制等方面的研究。模糊控制作为一种新颖的控制方法,越来越受到人们的重视。如果说,传统的控制是从被控对象的数学结构上去考虑进行控制的,那么,模糊控制则是从人类智能活动的角度和基础上去考虑实施控制的。在实际应用中,传统控制方法无能为力的非线性场合,模糊控制却能发挥得淋漓尽致,这使人们对模糊控制不得不另眼看待。目前,人们已经公认:模糊控制是实际应用中最有效的控制方法。一、模糊控制的发展从1965年美国加州大学自动控制专家L.A.Zadeh提出模糊集合论以来,模糊理论的研究已取得不少成果。1974年,英国的Mamdani首次用模糊逻辑及模糊推理实现了对蒸汽机的自动控制,从而宣告了模糊控制历史的开始。今天,在各种工业控制过程或者产品中,模糊控制已成为受欢迎的技术。家用电器、机器人、汽车、工业生产过程中的模糊控制都取得了极大的成功。模糊集成电路和模糊计算机、模糊逻辑开发系统的研究也取得了令人惊喜的进展。对模糊控制一直持怀疑和观望态度的美国,近几年也表现出前所未有的热情。 1.模糊控制理论和技术现状模糊控制理论需要解决的系统方法有:人的知识和经验的表达、知识推理的法则、人的知识的获取和总结、模糊控制系统和稳定判据、模糊控制系统的学习、模糊控制系统的分析及模糊控制系统的设计等。目前,各国学者提出的模糊推理方法不下几十种,但还没有一种方法能在各方面都表现出最大的合理性。在研究模糊控制系统的稳定性方面取得了一定成果,但稳定性理论还很不完善,有的稳定性判别还在走传统的精确系统的李雅普诺夫准则的老路,未能建立全新的方法。有的虽然已利用模糊理论对单输入单输出系统建立稳判别条件,但多输入系统的稳定问题尚未解决。至于模糊学习、系统分析和系统设计,基本上还没有一套合理而完整的理论方法。模糊控制技术需要解决的具体问题有:模糊控制器的构造、模糊信息与精确信息转换的物理结构和方法、模糊控制器对外界环境的适应性及适应技术、实现模糊控制系统的软技术、模糊控制器和被控对象的匹配技术等。模糊控制技术所要解决的是实用的具体问题,它在实际应用中取得了出人意料的成功。模糊控制器的构造目前已有三种不同的技术:第一种是采用传统的数字单片机或微型机作为物理基础,这种模糊控制器需要相应的软件才算构造完毕。第二种是用模糊单片机或集成电路芯片构造模糊控制器,利用配置数据来确定模糊控制器的结构形式。第三种是采用可编程门阵列构造模糊控制器,这主要是构造控制表,所以事先要进行脱机处理,形成描述模糊控制器的控制表。模糊信息与精确信息转换的问题,目前基本采用A/D、D/A转换和软件相结合的方法。其实,无需软件介入,A/D和D/A转换也可以作为模糊信息与精确信息的转换器件和方法之一。模糊控制器对外界的适应性问题目前还没有一种专门的良好的技术,大多还是沿用传统的技术,或者依赖于集成电路本身的工艺水准。实现模糊控制系统的软技术包括对系统的仿真和实际工作软件等。目前,已有多种仿真系统出现,Motorola、富士通、NEC、Neturalogix和国家半导体公司等都有相应的系统产品。不过,这些产品也有尚待提高的地方。国内的清华大学、广东工业大学也开发出了模糊推理机的有关软件和仿真系统。模糊控制器和被控对象匹配技术目前仍依赖于人们的经验;模糊理论中关于模糊模型的问题还有待深入研究。所以,在这种匹配技术中,人为的因素起着较大作用。 2.模糊控制的特点模糊控制在短短20年中取得了令人瞩目的结果。这主要在于它有一些十分明显的特点: (1)无需知道被控系统的数学模型。模糊控制是以人对被控系统的控制经验为依据而设计控制器的,故无需知道被控系统的数学模型。 (2)是一种反映人类智慧思维的智能控制。模糊控制采用人 单片机模糊PID自整定控制算法的实现及仿真 单片机模糊PID自整定控制算法的实现及仿真 作者:未知文章来源:网络点击数:923 更新时间:2009-5-23 由于液压伺服系统的固有特性(如死区、泄漏、阻尼系数的时变性以及负载干扰的存在),系统往往会呈现典型的不确定性和非线性特性。 这类系统一般很难精确描述控制对象的传递函数或状态方程,而常规的PID控制又难以取得良好的控制效果。另外,单一的模糊控制虽不需要精确的数学模型,但是却极易在平衡点附近产生小振幅振荡,从而使整个控制系统不能拥有良好的动态品质。 本文针对这两种控制的优缺点并结合模糊控制技术,探讨了液压伺服系统的模糊自整定PID控制方法,同时利用MATLAB软件提供的Si mulink和Fuzzy工具箱对液压伺服调节系统的模糊自整定PID控制系统进行仿真,并与常规PID控制进行了比较。此外,本文还尝试将控制系统通过单片机的数字化处理,并在电液伺服实验台上进行了测试,测试证明:该方法能使系统的结构简单化,操作灵活化,并可增强可靠性和适应性,提高控制精度和鲁棒性,特别容易实现非线性化控制。 1 模糊PID自整定控制器的设计 本控制系统主要完成数据采集、速度显示和速度控制等功能。其中智能模糊控制由单片机完成,并采用规则自整定PID控制算法进行过程控制。整个系统的核心是模糊控制器,AT89C51单片机是控制器的主体模块。电液伺服系统输出的速度信号经传感器和A/D转换之后进入单片机,单片机则根据输入的各种命令,并通过模糊控制算法计算控制量,然后将输出信号通过D/A转换送给液压伺服系统,从而控制系统的速度。该模糊控制器的硬件框图如图1所示。 模糊控制器的主程序包括初始化、键盘管理及控制模块和显示模块的调用等。温度信号的采集、标度变换、控制算法以及速度显示等功能的实现可由各子程序完成。软件的主要流程是:利用AT89C51单片机调A/D转换、标度转换模块以得到速度的反馈信号,然后根据偏差和偏差的变化率计算输入量,再由模糊PID自整定控制算法得出输出控制量。启动、停止可通过键盘并利用外部中断产生,有按键输入则调用中断服务程序。该程序的流程图如图2所示。 模糊控制系统的应用 一、模糊控制系统的应用背景 模糊控制系统是以模糊集合论、模糊语言变量和模糊逻辑推理为基础的一种计算机数字控制技术。1965年美国的扎德创立了模糊集合论, 1973 年, 他给出了模糊逻辑控制的定义和相关的定理。1974 年英国的Mamdani 首先用模糊控制语句组成模糊控制器,并把它用于锅炉和蒸汽机的控制, 在实验室获得成功, 这一开拓性的工作标志着模糊控制论的诞生。 模糊控制系统主要是模拟人的思维、推理和判断的一种控制方法, 它将人的经验、常识等用自然语言的形式表达出来, 建立一种适用于计算机处理的输入输出过程模型, 是智能控制的一个重要研究领域。从信息技术的观点来看, 模糊控制是一种基于规则的专家系统。从控制系统技术的观点来看, 模糊控制是一种普遍的非线性特征域控制器。 相对传统控制, 包括经典控制理论与现代控制理论。模糊控制能避开对象的数学模型(如状态方程或传递函数等) , 它力图对人们关于某个控制问题的成功与失败和经验进行加工, 总结出知识, 从中提炼出控制规则, 用一系列多维模糊条件语句构造系统的模糊语言变量模型, 应用CRI 等各类模糊推理方法,可以得到适合控制要求的控制量, 可以说模糊控制是一种语言变量的控制。 模糊控制具有以下特点: (1) 模糊控制是一种基于规则的控制。它直接采用语言型控制规则, 出发点是现场操作人员的控制经验或相关专家的知识, 在设计中不需要建立被控对象的精确数学模型, 因而使得控制机理和策略易于接受与理解, 设计简单, 便于应用; (2) 由工业过程的定性认识出发, 比较容易建立语言控制规则, 因而模糊控制对那些数学模型难以获取、动态特性不易掌握或变化非常显著的对象非常适用; (3) 基于模型的控制算法及系统设计方法, 由于出发点和性能指标的不同, 容易导致较大差异; 但一个系统的语言控制规则却具有相对的独立性, 利用这些控制规律间的模糊连接, 容易找到折中的选择, 使控制效果优于常规控制器; (4) 模糊控制算法是基于启发性的知识及语言决策规则设计的, 这有利于模拟人工控制的过程和方法, 增强控制系统的适应能力, 使之具有一定的智能 基于模糊PID参数自整定的温度控制系 统的研究 摘要:工业温度控制系统具有非线性、时变性和滞后性等特性,严重影响温度控制的快速性和准确性,为了解决常规PID参数调节在温度控制中适应性差,调节效果不理想的问题,这里采用了模糊PID参数自整定控制方法,用模糊控制规则对PID参数进行修改,利用Matlab的Simulink仿真工具箱做了常规PID与模糊PID的仿真对比试验。仿真结果表明,模糊PID参数自整定控制效果在超调量和调节时间上都小于常规PID,提高系统快速性和准确性,改善了温 摘要:工业温度控制系统具有非线性、时变性和滞后性等特性,严重影响温度控制的快速性和准确性,为了解决常规PID参数调节在温度控制中适应性差,调节效果不理想的问题,这里采用了模糊PID参数自整定控制方法,用模糊控制规则对PID参数进行修改,利用Matlab的Simulink仿真工具箱做了常规PID与模糊PID的仿真对比试验。仿真结果表明,模糊PID参数自整定控制效果在超调量和调节时间上都小于常规PID,提高系统快速性和准确性,改善了温度系统动态性能。 关键词:温度控制;Matlab仿真;模糊规则;PID 在工业生产过程中温度是重要的控制参数之一,对温度的有效控制对于保证生产质量具有重大的现实意义和理论价值。工业温度控制系统具有非线性、时变性和滞后性等特性,而常规PID控制器参数往往整定不良,性能欠佳,对运行的工作情况适应性差,导致常规PID控制不能使温度控制达到理想效果。为了改善常规PID控制效果,增强系统的适应性,实现PID参数自整定,本文设计出一种PID参数自整定的模糊控制器。利用模糊逻辑对PID控制器参数进行调整实现控制效果最优,将温度作为控制对象,并利用Matlab的Simulink工具箱实现仿真对比分析常规PID与模糊PID的曲线,最后应用到实际的温度控制系统中,对比分析常规PID与模糊PID的控制效果。 1 PID控制算法的相关介绍 1.1 PID控制算法 PID控制器因为结构简单、容易实现,并且具有较强的鲁棒性,因而被广泛应用于各种工业过程控制中。在传统PID控制中,PID参数在线整定一直是人们研究的问题之一,最早提出PID参数工程整定方法的是Z-N整定公式,至今仍然在工业控制中应用。而常规PID整定参数的选择取决于多种因素,比如被控对象的动态性能、控制目标以及操作人员对系统的理解等,因此肯定造成整定效果不理想。人们发现单纯靠常规PID控制算法是无法完成各种复杂控制的。在这种背景下,专家首次提出了基于继电器反馈的自适应PID控制系统应用于工业控制领域中。近年来国外对于Fuzzy-PID的研究已经由先前的基于专家经验的模糊控制技术实现PID参数调整的研究,逐渐转向基于人工智能神 模糊控制技术在电力系统的一些应用 1 引言 随着信息技术的高速发展,越来越多的智能产品出现在我们的生活中,我们对智能控制的要求以及稳定性有了很大的提高。所有我们有必要了解一下智能控制,智能控制有几个重要分支,其中包括模糊控制、神经网络控制、遗传算法三大分支。这里我们只对模糊控制进行了解和认识。首先我们先了解下什么是模糊控制。 模糊控制就是利用模糊数学的基本思想和理论的控制方法。在传统的控制领域里,控制系统动态模式的精确与否是影响控制优劣的最主要关键,系统动态的信息越详细,则越能达到精确控制的目的。然而,对于复杂的系统,由于变量太多,往往难以正确的描述系统的动态,于是工程师便利用各种方法来简化系统动态,以达成控制的目的,但却不尽理想。换言之,传统的控制理论对于明确系统有强而有力的控制能力,但对于过于复杂或难以精确描述的系统,则显得无能为力了。因此便尝试着以模糊数学来处理这些控制问题。 2模糊控制的特点 ○a简化系统设计的复杂性,特别适用于非线性、时变、滞后、模型不完全系统的控制。 ○b不依赖于被控对象的精确数学模型。 ○c利用控制法则来描述系统变量间的关系。 ○d不用数值而用语言式的模糊变量来描述系统,模糊控制器不必对被控制对象建立完整的数学模式。 ○e模糊控制器是一语言控制器,便于操作人员使用自然语言自然语言进行人机对话。 ○f模糊控制器是一种容易控制、掌握的较理想的非线性控制器,具有较佳的 鲁棒性、适应性、强健性(Robustness)及较佳的容错性(Fault Tolerance)。3模糊控制技术的应用 接下来我们介绍一下模糊控制在家电产品以及机电行业和生产生活等方面的应用。模糊控制在家电方面的应用有模糊电视机、模糊空调器、模糊微波炉以及模糊洗衣机等等。在机电行业的应用有集装箱吊车的模糊控制、单片机温度模糊控制、电梯群控制系统多目标模糊控制等等。生产过程中模糊控制的应用也是无处不在。例如发电厂的煤粉炉、热风炉以及继电保护系统都需要模糊控制理论的参与才能更好的完成发电生产。所以我们谈谈模糊控制在电力系统的应用。 3.1模糊PID控制器在火电厂温度控制系统中的应用 某电厂火力发电机组由锅炉、汽轮机和发电机三大主机及其众多辅助设备 收稿日期:2004-09-24复合模糊控制策略及应用 王 君,李 炜,乔平原 (兰州理工大学电气工程与信息科学学院,甘肃兰州 730050) 摘 要: 提出了一种复合模糊分段控制策略,应用于具有大惯性、强扰动并难以建立准确模型的系统,通过计算机仿真对三层PE温度控制系统进行模拟,取得了良好的效果. 关键词: 模糊控制;中频炉;三层PE 中图分类号: TP273 文献标识码: A 文章编号:1004-0366(2005)03-0108-04 A Segmented Fuzzy Control S trategy and Its Application W AN G Jun,LI W ei,QIAO Ping-y uan (College of Electrical and Information Engineering,Lanzhou University of Technology,Lanzhou730050,China) Abstract: A segm ented fuzzy control stra tegy is presented.It can be used to the system w hose exact mod-el is difficult to establish due to la rg e inertia and stro ng disturbances.Sim ula tion fo r the tem perature con-trol sy stem o f a three-lay er PE process has been do ne with goo d effects. Key words: fuzzy contro l;intermediate frequency stov e;three-layer PE 三层PE又称聚乙烯三层结构防腐层,是国际上目前最为先进的防腐技术之一.由于三层PE的生产工序较为复杂,各种变量之间存在强耦合、大惯性、非线性等特点,系统的工况随加工原料的不同复杂多变,对其建立精确的数学模型较为困难.因此采用传统的控制技术往往难以奏效,难以得到满意的效果.国内大多钢质管道聚乙烯防腐成型生产线的操作、工艺路线的确定都是根据生产者的经验确定,采用人工手动加电气控制配合的生产方式.受人为因素的影响,往往造成生产过程的不稳定,产品质量难以保证,生产效率低[1,2]. 模糊控制作为智能控制的一个重要分支,非常适用于控制那些因具有高度非线性、或参数随工作点的变动较大、或交叉耦合严重、或环境因素干扰强烈,而不易获得精确数学模型和数学模型不确定或多变的一类被控过程,也是当前控制领域的一个研究热点[3]. 针对三层PE生产工艺中严重制约生产效率以及影响产品质量的包覆段中恒速段传动、钢管胶化时的温度以及塑料挤出成型等工艺流程中的温度参数,以及在作者原有研究的基础上提出了一种复合模糊分段控制策略.以靖边防腐厂生产线的工艺参数为背景,进行仿真实验,仿真结果证明了这种算法的有效性. 1 系统工艺要求及结构模型建立如图1所示,经抛丸段预处理后的钢管,首先进入中频炉加热至200℃左右,经喷粉箱采用静电喷涂技术在钢管外表面熔结一层还氧树脂底漆(FBE),中间胶膜必须在FBE的胶化时间内包覆在钢管内,以保证熔融的共聚物粘胶剂与胶化状态的FBE发生化学反应,牢固粘结在钢管表面 . 图1 系统工艺模型 第17卷 第3期2005年9月 甘肃科学学报 J ou rnal of Gansu Sciences Vol.17 No.3 Sep.2005 第30卷增 刊 辽宁工程技术大学学报(自然科学版) 2011年5月 V ol.30 Suppl. Journal of Liaoning Technical University (Natural Science ) May 2011 收稿日期:2011-03-02 文章编号:1008-0562(2011)增刊Ⅰ-0190-03 PID 参数自整定模糊控制器的应用 李付举 (辽宁工程技术大学 理学院,辽宁 阜新 123000) 摘 要:针对电加热炉大惯性、纯滞后、参数时变的非线性对象的控制的特点,以及常规PID 控制参数不易调节的特点,提出了一种PID 参数自整定模糊控制方法,设计了PID 参数自整定模糊控制器,并在炉温控制系统中应用。实验结果表明: PID 参数自整定模糊控制消除了系统的稳态误差,没有超调和振荡,鲁棒性较强,而且简单易行,具有一定的实用价值。 关键词:PID 参数自整定;模糊控制;电加热炉;温度;误差 中图分类号:TM 924 文献标识码:A Application of fuzzy logic controller with self-tuning PID parameters LI Fuju (College of Science, Liaoning Technical University, Fuxin 123000, China ) Abstract :In view of electrical heating furnace's non-linear control object characteristics of large inertia, pure time-delay and parameters time-variation and the hard-to-tune characteristic of conventional PID control parameter, a new method for fuzzy control with self-tuning PID parameters was put forward. A fuzzy controller with self-tuning PID parameters was designed and applied in the furnace's temperature control system. The result shows that fuzzy control with self-tuning PID parameters eliminates the system's steady state error, has neither overshoot nor oscillation but great robustness, and is easily handled; therefore it is of some practical value . Key words :self-tuning PID parameters ;fuzzy control ;electrical heating furnace ;temperature ;error 0 引 言 电加热炉在现代工业生产中得到广泛应用。对这样一个大惯性、纯滞后、参数时变的非线性对象的控制,目前是研究的热点和难点问题。由于很难准确建立起电加热炉的数学模型,而且纯滞后时间 和惯性时间不易确定,仅用传统的控制方法难以完 成良好的控温任务。电加热炉温度控制系统,无论是启动或设定值升降,还是扰动影响,既希望时间上的快速性,也希望较平稳动态过程和精确的稳态 值。由于电加热炉的升温保温是靠电阻丝加热,降 温则是靠环境自然冷却,所以当温度一旦超调就无法用控制手段来使其降温。这类电加热炉控制对象具有非线性,时滞以及不确定性[1-2] 。电加热炉装置工业控制系统一般采用传统PID 控制方法,该方法 在特定的使用工况下具有较好的控制效果,但由于控制器的参数不便于调节,当使用工况发生变化 时,不能取得好的控制效果[3]。为了解决这一问题, 本文将模糊控制中模糊推理的思想和常规PID 控制 结合起来,将误差和误差变化作为模糊推理机的输 入,然后对PID 的3个参数进行在线自整定。这种方法能消除系统的稳态误差与颤振现象,显著改善 模糊控制系统的稳态性能。 1 PID 参数自整定模糊控制器 1.1 基本原理 常规PID 调节器因其算法简单而广泛用于工业过程控制中,通过调节PID 控制器的三个系数p I D k k k 、、,使其应用于各种不同的对象,并取得较好的控制效果。用计算机实现常规PID 的控制算法为 ()()()()k p I D i u k k E k k E i k EC k ==++∑ (1) 式中,()E k 、0 ()k i E i =∑ 、()EC k 分别为被控对象在采样时刻k 的误差、误差和、误差变化。 p I D k k k 、、分别为PID 的比例、积分和问题,虽关于模糊控制理论的综述
模糊控制详细讲解实例之欧阳歌谷创作
基于参数模糊自整定的PID控制器(精)
模糊控制技术现状及研究热点
模糊PID参数自整定
选取一个模糊控制的实例讲解
(完整版)模糊控制技术的发展及前景展望
模糊控制技术及其应用
单片机模糊PID自整定控制算法的实现及仿真
模糊控制系统的应用
基于模糊PID参数自整定的温度控制系统的研究(精)
模糊控制技术在电力系统的一些应用1
复合模糊控制策略及应用
PID参数自整定模糊控制器的应用
相关主题
文本预览