目标跟踪中的多传感器的数据融合:综述
摘要——用分布的多传感器进行目标跟踪在自动机器人、军事应用和通信系统等领域中是非常重要的一项工作。在这篇综述里,我们回顾了一些通过传感器的数据融合形成的鲁棒性跟踪的智能计算的方法。本文讨论了多个算法在JDL模型的不同层次的应用,并且强调了在不同应用环境中的缺点和优点。
关键词——分布式传感器,跟踪,信息融合,数据融合
1 引言
把多传感器的结果结合起来,相比单个传感器[1,2]而言,其可以产生更为精确的信息;这可以从现有的传感器或者小的或者是便宜的传感器中提高性能。本文补充了陆标[3]主题的综述,增加了最近10年的一些值得注意的突破,比如传感器管理和分布感应。多传感器数据融合(Multi Sensor Data Fusion ,MSDF)尽管大多数文献提到了军事目标跟踪[4]或者自动机器人这两领域,但是其可以应用到很多领域。军事分布的数据融合使得网络中心战(Network Centric Warfare ,NCW)[6,12]或者网络使用能力(Network Enabled Capability ,NEC) [7]变得方便。如果诸如战争和航天飞机之类的平台能通过网络互连并且进行数据共享,那么可能会收集到比他们各自的传感器得到的数据更为精确的数据。一个NEC系统包括三个主要成分[8]:
1.用一个传感器的集合生成观测值
2.产生一个自动把数据转换成信息和知识的处理系统
3.一个高速通信网络
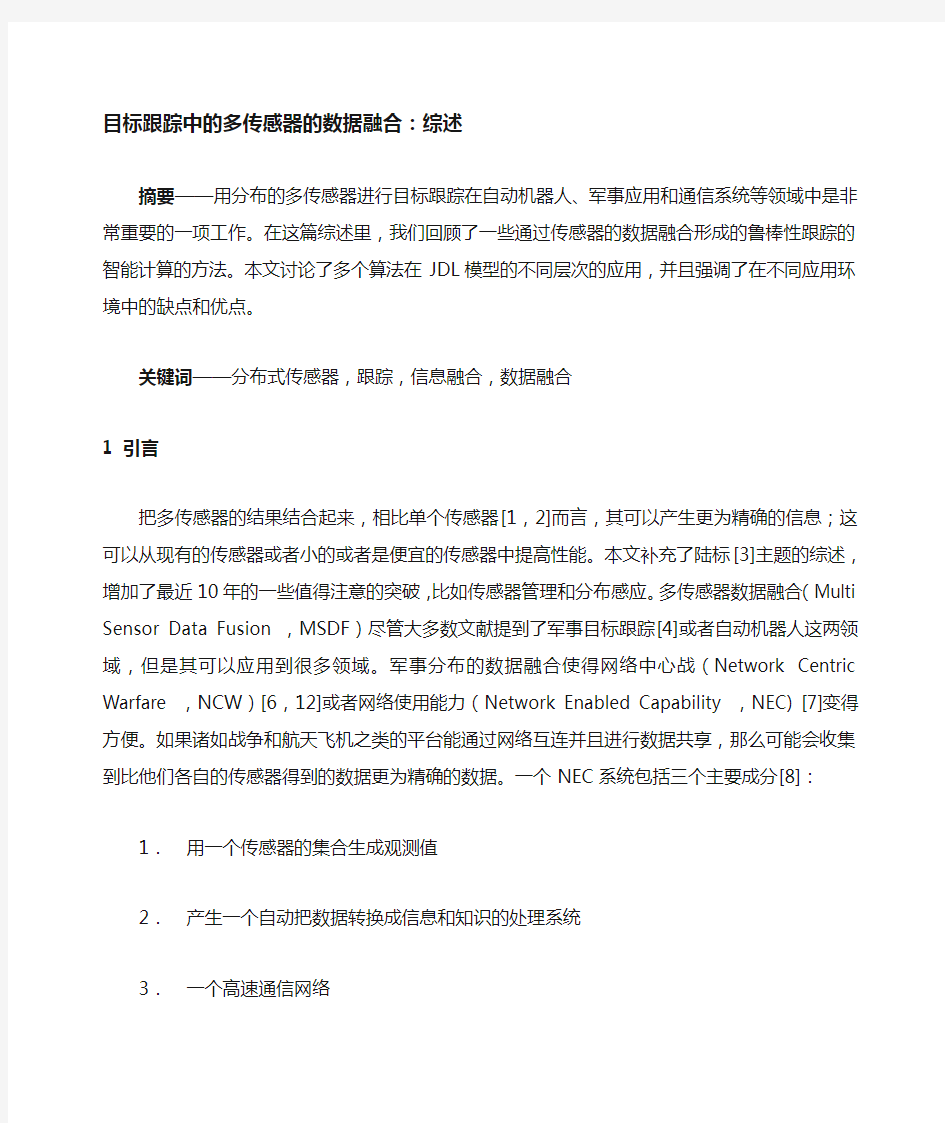
传感器可以聚集在一起,比如在一个潜艇上,甲板上有一些声波探测器,或者这些探测器分别由士兵随身携带[9]。所以,单词“平台”用来描述任何携带传感器的物体。在融合过程的结点中,数据可以来自于三个源中的一个[10](见图1):
1.数据类型1:平台自身的传感器的数据,称作“器官数据”
2.数据类型2:网络连接到其他平台的数据
3.先前的数据库中的数据
图1 一个网络使能的潜艇的三个可能的数据源
传统上讲,军事数据融合的体系结构是集中式的或层次化的[1]。然而分散结构却有着许多优点,
包括进程负担轻,没有单个集中式的数据库的需求,通信开销小,数据流瓶颈的可能性降低以及由于单个结点的故障的高存活力。
为了使集中式的数据融合变得容易,需要考虑三个主要问题:
1.体系结构——如何使结点连接和共享信息。如要详细了解MSDF的方面,文[12] [13]和[14]用了一个军事的观点,文[15]讨论了一个自动系统。
2.传感器管理——不同的战术目的,如何放置传感器最大化区域的覆盖范围。[16]
3.算法——如何处理这些过程。
尽管本文主要讨论了MSDF的军事应用,也很容易将其运动到机器人学习中。机器人在未知的环境中需要移动。由于诸如花费、可靠性和方便使用之类的因素,这种机器人身上最普通的两个传感器是超声波探测器和数字视频摄像机[17],[18]。MSDF要求把数据结合起来并处理。传统可用一些Kalman[19]和贝叶斯滤波器进行处理;然而,最近几年,有朝着模糊逻辑和人工神经网络[20]的趋势方向发展。
尽管已经提出了多于30个的融合结构[21],最被广泛应用的数据融合模型是由美国库数据融合联合局子委员会(American Joint Directors of Laboratories Data Fusion Subpanel)[22]。它把数据融合过程分成四层,从而建立一个过程层次。尽管这是数据融合的仅有层次,并且主要集中研究军事应用,但是却提供了一个有用的分类融合算法的结构。第2,3,4和5节是JDL模型的四个层次,用来对相似算法进行比较。
2 JDL第一层——“对象提炼”
对象提炼通常分成数据注册、数据关联、位置属性估计和鉴定[23]。这四类和对应算法分别在2.1,2.2,2.3和2.4节讲到。一些算法并不直接归属于某一单个类;例如,文[24],[25]和[26]都建立了把从两个或多个传感器中融合信息看作两个额外过程,建立了估计属性和鉴定的算法。关联和状态估计也作为一个单独的步骤[27]来提高性能。
2.1 数据注册
数据注册功能把数据指定到一个公共的参考框架中去。这经常从自我中心的Cartesian坐标系改变到纬度,经度和海平面的高度。
2.2 数据关联
关联这步是比较度量,并且尝试收集出自相同现实世界的度量使之为单个轨迹。难点在于区分目标,如果有可能则区分每个度量的源泉。这主要由度量—跟踪联合处理的。
在分布式系统中,关联也可以作为比较不同的进程结点的行踪的一步,把估计同一个现实世界目标状态的跟踪结合起来。这就是度量—跟踪联合。2.2.1,2.2.2,2.2.3,2.2.4和2.2.5描述了数据联合的多种方法。
2.2.1 近邻
近邻是联合的最简单形式。在该算法中,最近的度量确保此轨迹接近于更新轨迹。该算法非常简单,能够通过很小的计算代价寻找一个可行的解决方案。然而,在密集的环境中,可能导致许多对之间有着相似概率,所以错误会很大[28]。另一种相关的技术是“所有的邻居”:在门限范围里的所有度量包括在轨迹之内[28]。
2.2.2 联合概率数据关联(Joint Probabilistic Data Association, JPDA)
Bar-Shalom等建立了两个相关滤波器。第一个是概率数据关联(Probabilistic Data Association, PDA)[29]。其只对单个目标的情况工作。所有的在门限范围的轨迹附近的度量假定作为轨迹的更新。对每个有效的度量计算其关联的后验概率。这些概率值用来作为权重以计算带有权值的平均度量更新,并把它加到轨迹上去。
第二个滤波器是JPDA[30],它是PDA在多目标情况的扩展。在所有的目标之间计算度量到目标的概率值。对JPDA工作来说,每一个度量必须假定落入有效区域内以保证所有错误度量的概率密度函数是一样的[31]。
Bloem和Blom[32]发现了对于轨迹建立没有明确的办法,但是他们假设轨迹已经存在。如果不提供具体的推理,当新的目标出现,他们就会被理解为旧的轨迹,而不是建立他们自己的新的轨迹。另一个问题是,所有的度量更新所有的目标,意思是如果一个轨迹被噪声初始化,它将会被更新,并且它附近其他的轨迹使之一直保持更新。由于没有固定的方法解决过期轨迹,因而加重了该问题的严重性。PDA和JPDA的计算复杂度都是指数型的。
由于这些问题,文[32]提出了一个新奇的基于最近邻居的方法——严格的最近邻居PDA(Exact Nearest-Neighbor, NNPDA),并且发现其在没有聚集的情况下比JPDA计算更高效、更精确。
JPDA处理聚集的能力与ENNPDA避免轨迹同化的能力结合在一起,也就是我们知道的轨迹联合来建立双PDA(Coupled PDA, CPDA)[33]。在目标处于低速下,算法性能远远超过标准的JPDA;在高速情况下,这三个算法的性能是收敛的[34]。JPDA也已经扩展为多传感器PDA(Multisensor JPDA, MSJPDA)。它的性能比最近邻居算法的多传感器JPDA和单传感器JPDA都要好。
2.2.3 拉格朗日松弛
由于多传感器跟踪多目标,数据关联问题看作是NP难题。文[37]的证据表明,在所有的可能下,NP难题在计算高效下不能解决。但是许多近似算法可以找到近最优解。拉格朗日松弛就是这样一类技术。
Pattipatti等[36]首先把这种方法应用到数据关联问题中去。他们的解决保证多项式时间性能,并且内存需求只是O(n3)。该算法由两阶段组成:首先是把代价指定到所有可行的关联,同时在第二阶段,通过3维指派算法得到使得通用似然率最大化的可行解。
2.2.4 人工神经网络
跟踪数据关联选择基于多传感器的轨道,并且试图把与同一目标对应的轨道关联或成组。多于两个目标时,该问题就变成了NP难题,因此需要寻找近似的方法来解决。Winter和Favier[38]提出了一个用神经网络的方法来解决该问题。文[38]说明了该神经网络方法——基于Hopfield的神经网络,总是找到17.4%时间的最优解,找到其余时间的近似正确解。
2.2.5 模糊推理
普遍使用的PDA和JPDA的缺点在于,随着目标数的增加,计算时间量指数增长。模糊推理算法用“常识”代替数学来寻找解决办法[39]。
Hong等设计了一些数据融合的模糊规则,并把数据转换成带有下列值的模糊集{NL, NS, ZO, PS, PL}(大负数,小负数,零,小正数,大正数)。这些结果[40]表明用模糊推断会导致相比较JPDA 较低的平均RMS位置误差。模糊集越多,精确度越高。模糊多目标跟踪系统的计算代价比JPDA 要低。尽管越多的模糊集意味着越高的精确率,但同时也增加了计算负担。所以,为达到所要求的精确度必须选择合适数量的模糊集。
模糊数据融合算法(Fuzzy Data Fusion, FDA)[41]用类似于JPDA的方式处理数据关联,尽管输入和输出值在模糊集中被编码。对雷达进行红外线融合,我们发现对实验中模拟目标其比JPDA 的RMS位置误差要小得多。也证明了FDA的计算开销比JPDA低。
在文[42]中,Wang等用传统的雷达来看待融合电子支援度量(Electronic Support Measures, ESM)这个问题。在水面之上,雷达是最重要的传感器,因为其能为传感器的方位和距离提供精确的目标定位信息。ESM是被动的,检测目标发射的雷达信息,所以只能产生角度量。由于目标可能有许多发射者,因而有可能用多ESM轨迹融合单个雷达轨迹。在此研究中,Wang等计算了一个模糊合成相似度,其是基于雷达度量预测的方位和实际用ESM传感器测出的方位两者之间的残留。通过计算两个阈值来建立模糊集描述ESM和雷达数据的相关性。对于其中的一对,有:1.稳定的相关性,ESM信号和雷达轨迹吻合。
2.暂时性的相关,ESM可能和雷达轨迹一致。
3.暂时性的不相关,ESM可能和雷达轨迹不一致。
这使得该算法能够确定哪些轨迹和哪些雷达轨迹融合。
2.3 位置/属性估计
位置和属性估计是选择关联度量和计算目标状态的过程。目标运动分析(Target Motion Analysis, TMA)的一个例子是被动雷达。被动雷达只能测出目标的方位,而不是距离。有必要运行TMA来计算目标的距离和速度。在2.3.1,2.3.2,2.3.3,2.3.4和2.3.5中,我们回顾了最通用的位置/属性估计的方法。
2.3.1 卡尔曼滤波器
卡尔曼滤波器(Kalman Filter, KF)[43]在60年代首先提出来,自此就成了目标跟踪和机器人导航中最常使用的方法。已经证明了基本的KF是贝叶斯滤波器[44]的一种形式,而贝叶斯滤波器[是线性高斯系统的最优估计。假定有一系列的噪音度量,KF能够估计系统的状态。
KF的扩展是扩展的KF(Extended Kalman Filter, EKF)[45]。这能确保诸如只有方位的被动雷达数据的数据在KF中使用。由于线性化的步骤,EKF是次最优的。EKF在移动机器人导航的传感器融合文献中是最流行的工具。
KF和EKF两者原来都是用在单个传感器上。Willner等[46]首先提出了把位于集中融合结点上的本地传感器联合起来,以形成更为精确的全局估计。该算法的缺点是每一个本地传感器都需要全局估计,而全局估计需要双向通信并且否定了并行化的优点。
文[47]已经证明了,当KF用在集中融合结点上以融合多个本地KF的结果。这些结果可以通过把全局估计反馈到本地滤波器以作为下一步迭代的先前状态来提高性能。由于本地滤波器的输出在时间上是相关的,如此一个系统的性能可以得到提升,只有通过把每一个的第n个度量输出到全局跟踪器来得到接近的最优性能[48]。
KF和EKF的信息理论的观点在[133]中讨论。信息滤波器(Information Filter, IF)或者是转置协方差滤波器是估计状态向量的KF。信息状态向量由y=P-1x定义,其中x是传统的状态向量,P 是其协方差。信息状态向量的协方差是状态向量的协方差的转置,也是我们所知的Fisher信息矩阵或者信息矩阵。以这种方式,滤波器直接估计信息矩阵。该形式的滤波器尤其在状态向量比度量向量大的时候显示出优势。另外,没有物体被跟踪的先验知识的情况,可以由把信息矩阵初始化零[29]的表示方式解决。用KF/EKF做需要把协方差矩阵的元素设置为无限,事实是不可能的。
在度量模型高度非线性化的情况,甚至EKF有可能出现分歧。在这种情形下,算法的Sigma 点卡尔曼滤波(Sigma Point Kalman Filter, SPKF)族可以使用[50]。SPKF不是循环算法的期望,而是在平均值附近的精确选择出来的点循环聚集。用一些点,非线性可以更加精确的建模。一些点的使用可以使之变得与粒子滤波(见2.3.4节)相似;然而,SPKF需要一个较少点的幅值的顺序,所以计算开销大大降低。SPKF包括Unscented卡尔曼滤波(UKF)[51]。Van der Merwe等[52]发现,甚至UKF都仍然局限于高斯分布。
2.3.2 多模式算法
自20世纪60年代人们开始提出了静态算法,尽管近年来还没有可用的可实施的算法。如果用在滤波器中的模型不同于现实系统动力学,那么该滤波器将会出现差异。如果系统有多种运作方式,那么上述这种情况可能发生。而滤波器只能描述其中的一个。由于目标通常沿着一条直线运动,目标跟踪将会落入此类情形;但是在演习部队改变方向或速度,目标可以有一个短暂时期。[53] 伴随着Markov模型的转移是简单的,并且对有着变时参数的系统来说更为现实。两种大多数普遍使用的模式是广义假贝叶斯(generalized pseudo-Bayesian,GPB)[54],[55]和交互多模式(Interacting multiple model, IMM)[56]。两者都用了一组滤波器,尽管IMM可能需要的要相对少些。这些方法的优点是模块性;使用的滤波器可以是KF或者是EKF甚至是PDA或者JPDA[57]。IMM基线是混合系统的最简单形式。每个滤波器都是一个标准的Kalman滤波器,其中每一个Kalman滤波器都表示了一个不同的模式,比如说停止或运动[58]。
IMM同时也用来作为静态平滑。过滤只使用过去的度量,而固定间隙(lag)的平滑会延迟该进程通过固定数目——N个的更新。由于这些延迟,经过一段时间可以上升到N个度量。Chen和Tugnait[59]提出了基于IMM的固定间隙的平滑器,并说明了在平均平方误差情况下其精度可以成比例的增加到间隙。任何形式的间隙平滑,不可避免的导致了接受度量和计算目标状态估计这两者之间的延迟。度量的延迟也成比例的到间隙。零间隙的平滑器所以是一个滤波器。
IMM通常用来和诸如JPDA的关联技术联合起来以形成一个多目标的跟踪系统。如此算法可以用来跟踪接近的进行演习的目标[60],[61]或者聚类里的目标[62],[63]。这都是把JPDA的数据融合的步骤和IMM的状态估计的能力结合起来。Hwang等用了一个混合的IMM JPDA算法在航空交通控制中来跟踪飞机[64]。
2.3.3 多分辨率滤波器
数据可以看作是其达到的粒度层,或者也可以简单的看作是用小波变换得到的低粒度层。把不同数据粒度层结合对数据进行运做,我们称之为分辨率过滤器。这类技术已经成功应用到图象处理中以提高性能。但是,直接用该技术来对处理图象以得到目标跟踪进行是不可能的,因为图象处理必须作为一批处理方法进行的,而目标跟踪和信号处理必须在新数据到达时必须给出新的估计。
文[65],[66],[67]和[68]克服了这些难题,通过把数据划分成块以把MRF应用到目标跟踪和信号处理中。这样把数据表示成一个树的结构,而最顶层表示最高的精确度,即原始数据[69]。这样可以被描述成一个低通滤波器;由于数据从高层粒度到低层粒度传播,信号的高频率成分就被消除了。
所用的算法是IMM[70]的一种形式。在任何多模式算法中,知道什么时候目标正在演习是重要的,所以该算法可以从一种模式转移到另外一种模式去。任何跟踪算法可以用在每一层,近邻和JPDA 两者都工作的很好[71]。由于在最低层可获得的数据相当少,算法将会运行的比较快,而计算时间也增加了。在不同层用不同算法可以显著降低计算时间。如在最粗层发现了演习,则下一层检查是否演习可以被检测出来。如果检测出来了,这样一个决策就被传播到下一层进行处理。最好层可以精
确的鉴定出什么时候演习发生。把工作量分散在处理层之间,证明其相对IMM/KF滤波器,可以提高性能,尤其是在高背景噪音层的环境中[72]。
最初,分辨率只能通过的2的整数次方降低,即整个,1/2比率,1/4比率等等。这种情况在文[73]得到了改变,可以把数据分解成任意分辨率。Hong等[74]说明了相同的方法可以用来跟踪模糊的或者平静的目标,Fan等[75]进一步把该方法扩展成可以同时提高精确度和对多目标进行跟踪。2.3.4 粒子滤波
不幸的是,除了在模拟实验中,错误很少知道或者是高斯的,所以需要用任意概率密度函数的过滤器方法。早期的方法试图提高EKF的结果,但是涉及到用IMM。设置不同的模式以表示不同的高斯分布选择有权重的平均高斯结果,任意的分布都可以做为模式。然而,这种方法并不能自动的应用[76]。
直接的办法就是对概率密度函数进行建模从而把搜索空间分解成网格,用网格空间来表示概率密度函数的点。然而选择网格是一件重要的工作,尤其在多维空间中,许多网格点可能变得有必要。
粒子滤波器,或者是我们知道的Bootstrap, Condensation或者Monte-Carlo滤波器,都会遇到这个问题。不是用一个固定的网格代表概率密度函数,而是用可动的“粒子”。早期版本粒子过滤器使用固定数目的粒子,导致了粒子向单点崩溃,并且像KF用不当描述的高斯一样出现差异。
Cordon等[78]提出了一个“Bootstrap滤波器”或者顺序重要性重采样(Sequential Importance Resampling, SIR)。这样就带来了采样步骤,以防止滤波器发散,在每一步消除最低权重的粒子,在最高权重的点建立新的粒子。Bootstrap过滤器证明了在非线性度量的系统中跟踪其精确度比EKF 要好,比如EKF只跟踪方位。从那以后,提出了一些该方法的变体,比如多目标跟踪[79],[80]和用IMM PF方法的机动目标[81],[82]和[83]。PF已经证明在分布式传感环境下特别有效的[84]。可以在文[85]找到不同类型的PF的详细描述。
2.3.5 人工智能法
用知道的统计学的传感器融合倚赖于Kalman滤波和Bayesian统计学众所周知的技术。对不确定性没有具体的统计模型,其他方法,比如基于规则的传感器融合,模糊推理和神经网络可以代替。
基于规则。多传感器数据融合的一种最简单方法是Flynn[86]提出的,他给出一个简单的启发式规则的集合,该集合常常用在自主移动机器人以融合两个并排的传感器数据,其中一个是超声波传感器,第二个是接近的红外传感器[87]。虽然规则集很简单,但是往往很有效,通常以此作为基准来比较许多新的人工智能融合方法。
人工神经网络(ANN)。许多作者[87],[88],[89],[90],[91],[92]已成功应用神经网络到传感器融合中去。反向传播(BP)网络已经被用来作为航行能力,可以与尖端方法相媲美[93]。多层网络需要非常长的训练时间, 需要有替代方法来优化网络规模。径向基函数网络(LRF)比BP训练快,因为只有一层权重需要改变。
ANN的一个问题是确定合适的隐藏单元。Ash[95]提出动态结点生成(Dynamic Node Creation, DNC)系统,开始用一个小的网络,然后定时增加其大小,直至网络足够大可以处理任务了。DNC 后来被Ghosh和Holmberg[96]应用到数据融合中去。他们发现给定许多大量的结点,反向传播网络通常有训练过度的倾向,而把LPF和DNC结合起来却不会有这样的问题,尽管输出编码网络是最有效的网络类型。
目标状态估计也可以利用神经网络。比如,受大脑启发的接触估计(Neurally Inspired Contact Estimator,NICE)[97]是一种基于神经网络算法的目标运动分析(TMA)。NICE算法与最大似然估计
具有同等的精确度(MLE),但是其量级更快。
最近,遗传算法(GA)被用来设计神经网络以数据融合。Abdel-Aty-Zohdy和Ewing[98]用这种技术开发了一个电子笔的数据融合系统。
模糊推理的自适应过滤器。Kalman滤波器假定了过程和度量噪声协方差的先验知识。由于在大多数实用系统中这种假设几乎很少满足,所以他们都是估算的。这对过滤器的性能不利,甚至可能促进滤波器加快差异。因此,如果能解决这些问题,自适应滤波器比标准Kalman滤波具有更好的性能。Escamilla-Ambrosio和Mort[99]提出模糊推理的自适应的Kalman滤波(FL-AKF)。这用模糊推理来调整Q和R的值,以使之更好适应他们方差的估计值。这样在传感器故障诊断,异常排斥以及错误不时变动下工作得很好。
Sasiadek和Hartana[101]用三种新的技术来扩展这项工作:基于模糊推理的自适应C Kalman 滤波(FL-ACKF),基于模糊推理的自适应 D Kalman滤波(FL-ADKF)和基于模糊推理的自适应 F Kalman滤波(FL-AFKF)。所有这些都是基于FL-AKF的。结果表明,这些方法在异构传感器下用不同的动力和噪音统计测量同一参数情况下很有效。
FL-AKF已经用在自主机器人融合从里程计得到的位置资料与从甲板上声纳得到的数据[101]。测量机器人轮子已经转动过的次数的里程计很容易漂移。声纳测量外部空间目标的距离,这将是准确的,但能间歇性的得到。两个数据源的融合用来纠正里程计的飘逸。通常,这种融合是用KF进行的,但是用FL-AKF可以表现出更为精确的结果[102]。
2.4 鉴定
鉴定这一步是鉴定度量来源的物体。由于本文的目的,它假定本地平台利用自身传感器数据来生成它自己最好的目标标志估计和另一个标志的置信度值。一旦在本地鉴定后,必须融合远程估计以形成了全局的解决。
2.4.1 贝叶斯推论
贝叶斯推论(BI)是用概率表示置信度的方法。贝叶斯定理可以用来主观的信念估计。Hall[23]定义了一系列贝叶斯推论的问题,其中包括:
1.定义先验似然的困难
2.当有许多潜在的假设和许多条件独立事件的复杂度
3.假设必须互斥
4.不能在决策中描述不确定性
2.4.2 Dempster-Shafer(D-S)规则的结合
在一些环境下贝叶斯信念不再适用。后来,Shafer和Dempster[104]推广了传统的贝叶斯信念模型,允许了不确定性的明确表示。这样就要求了对一个分类算法对一个目标不能分类或者是不能彻底地列出它所属的所有的类别的情形进行建模。
然而,D-S不是没有问题。如果一个分类算法以99%置信鉴定目标为类型a,而另一个分类算法以99%置信鉴定目标为类型b,但是两者都以1%的置信鉴定目标为类型c,那么D-S把这些结合起来用100%的概率输出一个分类C。这是因为这是仅有的不冲突有的输出,但是结果却是反直观的。
Jiu等[105]认为相互冲突的总概率应该在所有的分类间作平均,这将导致一个更直观的例子,在上一段中,分类a和b每个都在低于50%的信念,而c略高于1%。Yu和Yin[106]也找到了这一
问题解决方法,他们把D-S合并到文[107]的并行决策结构中。这也解决了上述问题。D-S已用于各种融合环境,其中包括地雷探测[108],自主机器人[109]和医疗系统[110]。全面列出的D-S和基于贝叶斯的算法,见文[111]。
2.4.3 人工神经网络(ANN)
神经网络系统是一个庞大的并行分布处理单元。数据不是分开存储处理的,因为他们内在的联系。ANN的一个最困难的问题是选择最适合的网络拓扑。选择将取决于问题的特征,可能解决问题的途径的特征以及需要建立的神经网络的特点。还有几种类型的学习规则,这些都是受生物启发和网络如何学习的指导。
在一个最早利用神经网络融合多传感器数据鉴定的例子中,文[112]用传播和Hopfield神经网络鉴定目标。在反向传播中,数据提供给网络,再计算输入和输出的差额。改变权重以为改善结果。一旦错误在所有的训练数据集中被最小化,系统对测试数据作好了准备。Hopfield网络有输入输出的反馈,并给出动态响应。他们可以是不稳定,但迫使权重矩阵对称化并且主对角元为零可以确保稳定。周期性网络形成一个联想记忆。因此,像人类记忆一样,如果提供了记忆的一部分,该网络将返回全部记忆。给定有限信息,神经网络的联想性质可以用来鉴定目标。在给定的简单例子中,网络在鉴定目标时不会出现单个错误。证明有可能使用神经网络来识别并鉴定目标。
神经网络已被证明[113]是一个极其简便,容易的应用方法,在低层次的关联比其他融合方法性能要好。
2.4.4 专家系统
虽然神经网络是好的通用问题解决者,但是过程往往过于繁琐,这些主要困难之一是寻找正确量的训练数据,太少或太多的训练数据,系统便会做出错误的决策。Kittler[114]认为专家系统识别每一个平台并且采用加权平均作为结果的鉴定决策。
2.4.5 投票和总和方法
投票并求总和是两个热门,但是非常简单的分布分类办法。一个银行分类算法同时使用了这两种方法;这些可以位于传感器或者在融合算法中。在求和融合中,每个假设的分类器的置信度被求和,并且使用了最高的整体结果的假设。在投票融合中,由最高数目的传感器视为最有可能的假设最终被选择。在融合数据的误差是高斯分布的情况下,求和算法优于投票算法,而估计误差有一个截尾分布[115]的系统中则相反。这些都已经用在在各种各样的情形下,,如生物分类融合[116],地雷探测[117]和目标跟踪[118]。
2.4.6 分布分类
有可能在目标被检测的结点之间分布目标分类。大多数解决这一问题的方法都涉及到数据的集中处理,要么在中央点分类,要么把本地分类结果融合在一起。Carseh和Withanawasam[119]建立了一个模式,磁力计可以在汽车的磁性签名基础上进行分类。但是,这导致了每一个传感器结点的计算量负荷增加,并且要求汽车的磁性签名对可能观测到它的汽车知道。这在文[119]给出的的例子下都是可接受的。例子中指出,汽车行驶在马路上,而传感器安装在交通道路之下,但是有许多检测情况太严格。Raghavendra等[120]给出一个方法,其用传感器交换目标特征向量,而该特征向量可以用来分类。但是这带来很高的网络负荷。Duarte和Hu[121]依靠每个传感器来分类目标,然后分类集中融合,使得结点的计算量很大。
Arora等[122]用“影响场”来形成基于花费不高的二传感器的非集中的分布式分类器。他的这篇难以置信的深入的文章,涵盖了所有分布式传感式的细节,从传感器的使用(磁力仪、雷达等),检测处
理,分类,跟踪和时间同步。分类在测量传感器探测目标和其影响领域覆盖的范围的大小和形状。分类模块传递结果到跟踪器,跟踪分类一段时间,定位并同时降低错误。
构建分布式分类面临两难:是否采取所有节点的数据并且融合数据进行分类,称之为数据融合,或者每个节点进行本地分类并融合分类结果,称之决策融合。数据融合比后者通常需要更多的网络带宽。Brooks等[123]认为,如果数据所代表的信息是相关的,数据融合将是是更好的选择。,而决策融合将会是更好的选择只要数据是不相关的。另外,文[124]证明决策融合在数据是无故障的情形下工作的很好;然而当度量误差引入到系统中,其性能比数据融合下降得更快。
3 JDL第二层—“态势评估”
态势估计(Situation assessment,SA)融合数据的运动学和时间的特征,以建立警报暗示,行动计划,关于军事力量和信息的结论下的情况描述。SA算法决定目标是否以及如何采取或者可能采取敌视态度。不幸的是,大多数研究是在低层融合,因此这方面[125]不好理解。
Looney和Liang[126]用一系列算法来进行态势评价。首先,统一的K集中值(UKCM)算法对检测目标进行聚类分组,如果这些集群已形成,有可能使用模糊信念网络评估其内容。模糊信念网络的简单规则集简单实验场景,说明了该方法能够进行态势评估,尽管这需要较为复杂的信念网络来解决任何实际问题。
这也是在非军事背景中有意义。比如上下文感知处理,其任务是开发出一个能理解和作出恰当反应的机器。Wu等[127]从全方位摄影机和麦克风看多传感器数据融合,以检测会议的出席者的注意力的集中。在这篇论文中,Dempster-Shafer推理用来把传感器的处理过的输出结合起来,例如会议地点和谁正在讲话。这些都用来提高每个与会者的注意力集中的估计值,从而与单个传感器的输出结果相比较。
4 JDL第三层——“危险评估”
第三层细化评估正对被跟踪的敌人造成的威胁。这也可能包括友军的与敌军有效交战的能力的评估。融合第2层和第3层通常称为“信息融合”,而第1层则是“数据融合”。虽然这个区分是模糊地,但是是有用的,因为高层往往运用符号而不是数学推理,其来得更为主观[128]。在人为因素的研究中,往往被称为“环境意识”(S ituational Awareness,SA)。
JDL模型的第3层在文献中相对其他层次而言得到最少的关注。最初的论文开始以该主题出现,尽管目前像理解这个问题的挑战一样去解决它。
Salerno等[21]为起点环境感知的信息融合的框架提供了起点;并举了一个例子,在此情况下自动的环境意识可能是有好处的。文章对公制可以用来验证环境感知方法的讨论进行了总结。
Jakobson等[129]用认知的融合方法看待危险评估这个问题。把这个问题分解为三个方面:
1.态势意识,多传感器数据的意义理解,复杂时间依赖模式的识别以及确定威胁和其他暴露意图的活动。
2.决议意识, 思考情况并且理解有动机的行动的分枝。
3.知识意识,学习和改进融合步骤的技能,利用历史数据融合建立新的模式和类别状态。
把实时事件关联(EC)和基于案例推理(CBR) 结合起来以制作一个威胁评估的通用框架。当EC 识别一系列相关事件,CBR可以用来鉴定该事件为一个案例,而案件增加附加的意思到事件的集合事件和,并且推断出可能的状况。Jakobson等[129]提供了一个可行系统基,但建议进一步工作必
须在一个系统用在实际问题领域之前完成。
5 JDL第四层—“进程评估”
进程管理阶段是一个对其他融合阶段的不间断的评估,以确保其他数据合并和融合在给出最优结果的方式下进行。这也可以在融合过程中通过调整参数来提高结果,建立一个优先目标[2],或者移动传感器提高搜索区域的覆盖范围[16]。最优传感器调度问题与警报布局问题(众所周知的NP完全问题)和背包问题(众所周知的NP完全问题[130])都紧密相关。
Penny[131],[132]找到了一种尽可能快的定位潜艇的策略。其用被动声纳浮标传感器,证明可以降低检测次数到4次。Hernandes等[133]概括这些成果,建立了一个对聚类存在下目标跟踪中的多传感器的系统化的管理框架。
Niu等[134],[135]给出了一个最优化分布传感器的及时方法,结果显示以高概率被检测并且一个媒介或者高机动索引,那么时间交错的传感器(轮流更新到达的传感器)应该可以用。在其他情况下,在交错的和同步(同时到达)传感器更新并没有什么关系。如果两个传感器性能大大不同,然后使他们同步以得到最优的结果。如果他们有相同或相似的性能,那么他们就应该交错均匀。
多传感器管理(MSM)在文[136]中被讨论。作者认为传感器管理影响到JDL模型的各层。他们把MSM描述成自上而下的方法,开始于第4层,但是继续下跌到第1级,如下:
●第4层(任务规划)
●从事哪种服务?
●哪一个准确程度?
●环境领域的重点是什么?
●第3层(资源调度)
●需要额外的传感器么?
●新的传感器放置在哪?
●第2层(资源规划)
●多传感器跟踪的传感器选择。
●传感器引导,一个传感器到另一传感器的跟踪。
●第1层(传感器规划)
●对每个传感器命令的时间轴。
5.1 分布感应
进程评估也已经在分布式感应文献中覆盖。这里,这是一个动态的选择使用哪一个传感器来在最有效情形下获取信息。文[137]首先提出用Shannon信息论的思想,文[138]首先提出基于期望信息增益的选择传感器。Wang等[139]最近说明了动态选择传感器请求数据的方法,以便使信息增益最大化。Wang等[139]用贪婪选择下一传感器;在所有的没有用过的传感器中,其中信息增益最大的那一个将会被使用。
Moore等[140]提出了一个在分布结点上设计一个移动结点demon使用大多数有限资源系统。该demon允许一个结点下载分类或者跟踪因为它发现需要他们。在此同时清除那些不再需要的结点。这样允许系统动态配置本身。Friedlander等[141] 延续[140]技术那里一个节点自身形成集群或联盟的系统。这避免了“维度灾难”(其在非常大的系统下非常麻烦)的问题。没有这一点,每个节点将被迫与其他结点共享信息,这意味着每个结点加入到网络中,处理和通讯负担将会增加。同时,
在提出的模式中,结点只能与其处在同意联盟的结点共享信息。
在其他的联合形成方法中,文[142]讨论了对自动结点如何形成动态联盟。动态联盟是一个工作队,在单一结点没有足够的资源来执行任务时联合起来执行任务。节点学会组成联盟从而更为多产。实验结果表明,这些合作的agent可跟踪目标跟踪, 远胜那些个体地简单反应的跟踪器,并能够分享计算资源,允许更快、更有效的处理。
Hong等和Yadger等[144]讨论了建立层次的方法。在层次中,结点根据地理分成联盟,每个联盟选出一个领导者。在文[143]中,每一个由联盟领导者分配一个轨迹领导者,并且该结点命令团队中其他结点。该技术用冲突解决的策略工作,该策略是对结点给出两个相冲突的任务。所作的工作其中有两个节点时需矛盾的任务。Yadger等[144] 研究一个结构的层次数目是如何影响性能的,并且发现,随着层次数目的增加,它可以跟踪到的目标数会减少;然而,为完成其任务的单个结点的所需的时间量会指数下降。
Ortiz等提出了一种基于拍卖(auction)的方法,叫做动态调解(DM),形成并分配工作到合作团队结点。在DM中,喊价(bid)不是简单的从一个特定结点的个别值,而是从一个团队结点的喊价,它可以诸如分配到该团队的其他工作的正的或负的交互的信息。[145]的实验结果表明,相比传统的拍卖方法(时间是有限的)而言DM获得最大的性能提升。
Liu等[84]通过把分配数据点到跟踪的目标和位置估计的这样一个过程分离来解决维数灾难。彼此远离的目标用传统的方法是分离跟踪的,而接近的目标可以连带地跟踪。由于多于一个目标可以被同时跟踪,概率密度函数不是高斯分布的。这样将导致[84]用一个粒子滤波器来作为位置估计算法,因为它可以估计任意分布。
Akyildiz等已经关于该主题从网络的观点写了一篇综合的综述[146]。这给出了主要网络拓扑和可获得的协议的描述,并下结论说在传感器网络里仍然存在没有解决的问题,比如容错、可扩展性、结点代价和功率消耗。在另外一篇综述中[147],同样的作者概述了传感器网络的主要应用,比如:
●军事应用,比如监控友军和战斗损失估计;
●环境应用,比如鸟迁移,或者洪水检测;
●卫生应用,在医院内跟踪医生,或者远程监控病人的生理数据;
●家庭自动化
6 多传感器跟踪的挑战
分布式多传感器主要有两个挑战:1)数据到达的顺序可能对无序抵达的过程和度量不适合;2)一个传感器对另一个传感器或者数据相关性的影响。
6.1 无序度量(Out of Sequence Measurements, OOSMs)
每个度量在一个离散的“时间戳”到达融合算法。在一个多传感器跟踪系统中,将有来自不同的数据源的许多传播次数,显然一些数据是以无序抵达的(在大多数多传感器系统中是可能的)。典型的,融合系统只保留最重要的统计数据的历史,如状态估计与协方差矩阵。所以,问题在于用OOSM寻找一种方法来更新当前估计。
早80年代前OOSM一直是个问题[148]。解决延迟度量的早期尝试倚赖于在度量建立和处理期间这两者接收到的非新的度量[149],[150]。这些方法都是有效的,但只解决了数据被延迟的问题,而不是数据常常在错误的顺序里这样一个事实。
在精确度方面一个直观的、完美的解决方案是按时间顺序储存全部输入,然后当OOSM接收到
以后,重新处理所有数据。尽管给出了最优解,但无论是在运算还是在存储需求上都要求过高。
Blackman和Popoli[151]以及Hilton等[152]提出一种近似的解决办法,称之为“算法B”。Bar-Shalom[153]后来作了延伸,用最优输出建立了一个算法“算法A”。然而,所有这些算法都假设OOSM的滞后少于一个步长。Bar-Shalom[153]也证明了算法B是近最优的。
自此以后,有许多人尝试改进算法以对任意滞后都适用[154],[155],[156]。Bar-Shalom等[157],[158]不仅这些算法在计算负担和存储需求方面都开销大,而且提出了一个新的方法在处理单个步骤中利用OOSM,计算类似于标准的Kalman滤波。对算法A和算法B两者做调整。新的任意的滞后算法分别叫做“A1”和“B1”。尽管A1的结果是是最优的,处理时间却非常高。B1是可取的,因为相对算法A的结果其相当快。
Hong等近来改进多速率IMM(MRIMM)算法[70]在OOSM问题上[159],[160],[161]工作。多速率滤波器的实质是把自己借给OOSM的合并,因为它同时提供高效的状态估计追溯的处理结构和高效存储历史信息的存储结构。其它算法比如IMM[162]和[163]多假设跟踪也已经被改进使得集群跟踪或处理OOSM时用演习目标变得有效。
所有这些方法都是基于Kalman滤波的,用粒子滤波不会起到帮助作用,因为必要的计算负担用他们是不可能的。早期尝试解决OOSM问题都集中在在OOSM时间内重新生成概率密度函数[153]。在粒子滤波中,这将会需要相当多的计算资源。为了避免这个难题,Orton和Marrs[164]在每一步存储粒子的分布以避免重新计算它们。后来证明,当延迟增加,这种方法的结果只是轻微的变坏,仍然接近于最优[165]。不幸的是,文[166]说明这样将会需要一个不合理的存储来保持每次更新的每个数据点的状态,该文并且描述了一个高效的方法像基于Kalman滤波的方法一样追溯状态。
值得注意的是,文[166]描述了基于Kalman滤波的方法性能是相似的,尽管比基于EKF的稍微差点。Mallick和Marrs写了一个基于KF和基于EKF的OOSM滤波器的综合比较[167],发现线性度量模型——OOSMKF算法得到最优的结果。数值结果显示,OOSMKF算法是次最优的。非线性GMTI雷达数据的实验显示,OOSMPKF和OOSMPF的状态估计的偏好误差是小的并且可比较的。证明对小的滞后和过程噪声的小值,OOSMKF可以与OOSMPF相比较。
OOSM不仅仅是度量融合的问题。Challa等[168]他们也会影响跟踪到跟踪(track-to-track)融合,提出了一个增加状态kalman滤波器(augmented state KF, AS-KF)。这是一个kalman滤波不仅处理当前状态而且同时处理先前状态。当一个轨迹到达,进入计算的度量得到并用来更新算法,允许处理序列轨迹。Challa等[168]证明这会提高性能,为了补充AS-KF,文[169]建立了一个提高的状态概率数据融合(augmented state probabilistic data association,AS-PDA)算法来处理集群中的OOSM。
6.2 数据相关性
Kalman滤波的一个问题是它需要要么是独立的测量,要么是跨协方差(crosscovariance)已知。一个普遍的简化是假设跨协方差是零,但在这种情况下,KF得到非守恒的协方差。这导致了人为的高置信度值,从而导致滤波器出现差异[170]。最优的基于KF的办法是KF在更新之间保持跨协方差[171],[172],[173],[174],[175]。但是,这个解决方案与更新数目成平方比例,因此是不切实际的[176]。考虑正确的跨协方差并不能改善结果,即使它降低假关联率[177]。
分布式传感器环境的轨迹之间相关性的一个普遍的原因是数据相关或谣言传播,数据相关是原始度量不经意的使用多次。这要么是由于从其他传感器到融合结点采取几个不同路径的相同信息,要么是循环路径(其中信息从一个融合结点的输出到输入重新传播[178])。例子显示在图2。图2的
例子是非常简单的,当传感器数量和度量数量增加时,数据相关性就变得难于鉴定和纠正。
图2 导致数据相关的数据流
数据相关性开始看来是不重要,可以避免,但对于融合,最简单的通信方法是发送所有的原始度量。这就要求对源泉不进行处理,而对目的地进行相对的直接处理。只要存放哪一个轨迹更新的记录被使用,可以避免相关。这一解决方案不幸被证明是不切实际的,因为它不能很好缩放(scale)[179], 从此就无人问津了。
相关经常在定位算法中导致状态估计的偏好研究。然而,它也可能不经意的影响鉴定的数据融合。JDL模型的更高层,相关可能有难捉摸的暗示。举例来说,如果一个传感器被部署在一个区域以确认目标的描述,然后寻找这样一个物体的先验知识必须相对应的修改,或者当匹配对象被发现时鉴定中的置信度。
度量重建[180],[181]是一种能够用在全局融合结点的方法。其比较接受的远程估计与自身版本的全局估计。然后有可能是重建导致估计改变到另一估计的度量。这样就可以重新找到远程度量,并在本地融合算法中使用。这一技术被扩展[182]到集群里的目标跟踪,把JPDA合并到该方法,然后进一步把多传感器[183]和非高斯误差分布包括到与高斯混合模式[184]中。
McLaughlin等[185],[186]对于分布式的体系结构提出一种数据相关消除策略。算法利用其他结点的估计解决他们的远程度量。它存储远程度量并且用度量来更新自己的状态估计;这样在数据融合之前相关已经消除了。
由于估算跨协方差计算开销大,Julier和Uuhlmann提出协方差交集(CI)算法[187]。这是基于这样一个简单前提:如果两个联立估计的协方差的被视为重叠的椭圆,那么希望作为结果的协方差将会是两个椭圆的交集周围最小的椭圆(见图3)。这样同一数据可能向过滤器提交若干次,协方差将不会减小,也就不能提供新鲜的信息。Julier和Uuhlmann[187]也说明了CI算法可以在环形的估计的网络工作组工作。这一点很重要,因为[188]说明对于KF是不可能的。
图3 协方差交集
Arambel等[189]比较了CI和KF的使用,他们用两个算法使飞船按严格的队形饶轨道飞行已进行干涉。四个飞船将会把光反射到第五艘飞船,而第五艘飞船将会把度量转换成干涉检测。为此,队形的精确度需在0.1m和0.3毫弧度范围之内。飞船估计另一个的位置,在一个环行网络里把信息传递到另一艘飞船。这导致正在融合的值之间的跨协方差。每条船一组卡尔曼滤波器来估计整个网络的状态。数据要么通过读传感器更新,要么在环行网络中其前一个飞船的所有位置估计来更新。选择的解决办法是,对从有机传感器接受到的数据使用Kalman滤波,对无机度量使用协方差交集(CI)算法。这防止了数据的跨协方差和过滤器分离。
Hurley[190]对于CI方法给出了其信息理论的证明,并指出CI能够融合任意概率密度函数,而不只是高斯分布的。他还指出,尽管CI能极好的密度融合,如果需要度量融合的话,那么更为传统的融合方法可能会适合。
协方差相交通过联立的两个协方差的权重平均来工作。该权是一个单个值,其按照如下的方式用来联立协方差和:。Chen等[191]说明,当联立的两个协方差是N维向量时,权将会是N维向量。而CI对于可能的值只搜索一维曲线。然而,[192]发现CI可以找到最优值。这提供了协方差相交问题的形式化的的证明,对于联立的协方差寻找一个上界。文章同时说明了,CI进行N维优化而只搜索一维空间,这是一个非常有效的算法。
寻找权重值是CI中计算最复杂的过程。为了降低该算法的计算开销,[193]次优的非迭代算法来寻找。
CI解决相关性的输入这个问题,但是对不一致的输入却没有定义。为了解决这个问题,Uhlmann 提出了协方差并集(Covariance Union, CU)[194]。通过计算马氏距离(MD)可以检测出不一致的输入。如果MD超过一个阈值,那么该并集而不是协方差的交集将会被使用。Uhlmann[194]还说明了这种方法也能排斥异常。
CI是悲观的,椭圆比需要的要大;这恰好是EKF的反面。最大椭球算法[195]避免了这样一个问题,其建立一个最大的椭圆来在协方差的交集范围内匹配(图4)。这通常比CI算法乐观。
图4 最大椭球
Kalman滤波器是最优的,假设数据是从独立源得到的。如果相关性信息丢失或不完整,那么结果将会是一个不一致的估计。协方差交集避免了这样的尴尬,但是其保守的估计会降低性能。最大椭球带来更紧的估计,因为它低估而不是高估了协方差,尽管比KF低估的要低,所以过滤器分离仍然可以避免。
7 结论
本文概述了分布式数据融合的方法。该讨论是以著名的JDL数据融合框架为基础。多传感器数据融合是一个活跃的研究领域,横跨了许多传统的研究领域:工业控制、自主机器人、军事跟踪。
许多工作都集中在JDL框架的第1层“数据提炼”,包括了数据注册、数据关联、位置属性估计和鉴定。其他三层在文献中覆盖的就比较少。可能是因为高层需要以第一层作为基础。既然坚实的理论基础已经奠定,这方面的工作已经起步,但是还需要许多年才能赶上第1层的工作广度。
本文除了概括了当前的方法,还讨论了有选择的数据融合的剩余挑战。大多数第1层的数据融合研究(上一个十年已经解决了)已经把重心集中使用多分布式的传感器所带来的问题上。尽管许多人已经写了关于这方面的文章,但是许多问题仍然完全被解决。举例来说,对于无序度量(OOSM)的问题存在很多解决方法,但是只集中在经过很少扫描次数的无序度量上。精确的利用任意时期的度量仍然是难以理解的。协方差交交集经常被看成是数据融合中的跨协方差问题的万能药。然而,在粒子滤波器中或者在目标识别中仍然没有解决这个问题,而且对联立数据提供了悲观的结果。我们期待未来的研究将会提出一些挑战,并且能够提出好的不确定度处理的方法。
参考文献
[1] C.-Y. Chong, S. Mori, K.-C. Chang, and W.H. Barker, “Architectures and Algorithms for Track
Association and Fusion,” IEEE Aerospace and Electronic Systems, vol. 15, no. 1, pp. 5-13,
Jan. 2000.
[2] E. Waltz and J. Llinas, Multisensor Data Fusion. Artech House, 1990.
[3] D.L. Hall and J. Llinas, “An Introduction to Multisensor Fusion,” Proc. IEEE, vol. 85, no. 1, Jan.
1997.
[4] R.C. Luo, “Multisensor Fusion and Integration—Approaches, Applications, and Future
Research Directions,” IEEE Sensors J., vol. 2, no 2, Apr. 2002.
[5] R.C. Luo, C.C. Yih, and K.L. Su, “Multisensor Fusion and Integration: Approaches, Applications,
and Future Research Directions,” IEEE Sensors J., vol. 2, no. 2, pp. 107-119, Apr. 2002. [6] M.G. C eruti, “Data Management Challenges and Development for Military Information
Systems,” IEEE Trans. Knowledge and Data Eng., vol. 15, no. 5, pp. 1059-1068, Sept./Oct.
2003.
[7] The Secretary of State for Defence, “Delivering Security in a Changing World,”de fence white
paper, U.K. Ministry of Defence, Dec. 2003.
[8] N.J. Hammond, “Revolution in Military Affairs—Does Hydrography Have a Part to Play?” Proc.
US Hydrographic Conf., 2001.
[9] F. Stein, J. Garska, and P. McIndoo, “Network-Centric Warfare: Impact on Army Operations,”
Proc. IEEE/AFCEA EUROCOMM Information Systems for Enhanced Public Safety and Security, pp. 288- 295, 2000.
[10] J. Llinas, “Studying the Complexities in Distributed Object Tracking Systems,” Proc. 2003
IEEE Int’l Conf. Systems, Man and Cybernetics, vol. 2, pp. 2035-2041, 2003.
[11] M.E. Liggins II, C.-Y. Chong, I. Kadar, M.G. Alford, V. Vannicola, and S. Thomopoulos,
“Distributed Fusion Architectures and Algorithms for Target Tracking,” Proc. IEEE, vol. 85, no.
1, Jan. 1997.
[12] S.A. Moody, “Challenges in Building Scalable Network Centric Real Time Information
Dissemination Systems,” Proc. Eighth IEEE Workshop Object Oriented Real Time Dependable Systems, 2003.
[13] M. Kokar and K.H. Kim, “Review of Multisensor Data Fusion Architectures and Techniques,”
Proc. 1993 IEEE Int’l Symp. Intelligent Control, pp. 261-266, 1993.
[14] A. Gad and M. Farooq, “Data Fusion Architecture for Maritime Surveillance,” Proc. Fifth Int’l
Conf. Information Fusion, vol. 1, pp. 448-455, 2002.
[15] H. Xinha n and W. Min, “Multi-Sensor Data Fusion Structures in Autonomous Systems: A
Review,” Proc. 2003 IEEE Int’l Symp. Intelligent Control, pp. 817-821, 2003.
[16] N. Xiong and P. Svensson, “Multi Sensor Management for Information Fusion: Issues and
Approaches,” Elsevier Information Fusion 3, pp. 163-186, 2000.
[17] G. Benet, J.E. Simo, and M. Martinez, “A Multisensor Robot Distributed Architecture,” Proc.
Symp. Information Control in Manufacturing, vol. 2, pp. 583-588, 1999.
[18] G. De Cubber, H. Sahli, and F. Decroos, “Sensor Integration on a Mobile Robot,” ISMCR 2002:
Proc. 12th Int’l Symp. Measurement and Control in Robotics, June 2002.
[19] J.B. Gao and C.J. Harris, “Some Remarks on Kalman Filters for the Multisensor Fusion,”
Elsevier Information Fusion 3, pp. 191-201, 2002.
[20] R.R. Murphy, “Sensor Fusion,” Handbook of Brain Theory and Neural Networks, Bradford
Book, 2003.
[21] J. Salerno, M. Hinman, and D. Boulware, “Building a Framework for Situational Awareness,”
Proc. Seventh Int’l Conf. Informatio n Fusion, pp. 219-226, 2004.
[22] US Dept. of Defense, Data Fusion Subpanel of the Joint Directors of Laboratories, Technical
Panel for C3, Data Fusion Lexicon, 1991.
[23] D. Hall, Mathematical Techniques in Multisensor Data Fusion. Artech House, 1992.
[24] M.L. Krieg, “Joint Multi-Sensor Kinematic and Attribute Tracking Using Bayesian Belief
Networks,” Proc. Sixth Int’l Conf. Information Fusion, vol. 1, pp. 17-24, 2003.
[25] A. Farian, P. Lombardo, and M. Marselia, “Joint Tracking and Identification Al gorithms for
Multisensor Data,” IEE Proc. Radar and Sonar Navigation, vol. 149, no. 6, Dec. 2002.
[26] D.W. Pace, M. Mallick, and W. Eldredge, “Spectral Feature-Aided Multi-Target Multi-Sensor
Passive Sonar Tracking,” Proc. IEEE Oceanic Eng. Soc. Conf., v ol. 4, pp. 2120-2126, 2003.
[27] L. Kester and A. Theil, “Fusion of Radar and EO Sensors for Surveillance,” Proc. Third Int’l
Conf. Information Fusion, vol. 1, pp. TUD1/3-TUD1/9, July 2000.
[28] S.S. Blackman, “Association and Fusion of Multiple Sensor Data,” Multitarget Multisensor
Tracking: Advanced Applications, Y. Bar- Shalom, ed., pp. 187-218, Mass.: Artech House, 1990.
[29] Y. Bar-Shalom and E. Tse, “Tracking in a Cluttered Environment with Probabilistic Data
Association,” Automatica, vol. 11, pp. 451- 460, 1975.
[30] Y. Bar-Shalom, “Extension of the Probabilistic Data Association Filter to Multitarget Tracking,”
Proc. Fifth Symp. Nonlinear Estimation, pp. 16-21, Sept. 1974.
[31] Y. Bar-Shalom and X.-R. Li, Multitarget-Multisensor Tracking: Principles and Techniques. YBS
Publishing, 1995.
[32] R.J. Fitzgerald, “Development of Practical PDA Logic for Multitarget Tracking by
Microprocessor,” Multitarget Multisensor Tracking: Advanced Applications, Y. Bar-Shalom, ed., 1989.
[33] E.A. Bloem and H.A. P. Blom, “Joint Probabilistic Data Association Methods Avoiding Track
Coalescence,” Proc. 34th IEEE Conf. Decision and Control, vol. 3, pp. 2752-2757, 1995. [34] H.A.P. Blom and E.A. Bloem, “Probabilistic Data Association Avoiding Track Coalescence,”
IEEE Trans. Automatic Control, vol. 45, no. 2, Feb. 2000.
[35] S.D. O’Neil and L.Y. Pao, “Multisensor Fusion Algorithms for Tracking,” Proc. 1993 Am.
Control Conf., 1993.
[36] K.R. Pattipatti, S. Deb, Y. Bar-Shalom, and R.B. Washburn, “A New Relaxation Algor ithm and
Passive Sensor Data Association,” IEEE Trans. Automatic Control, vol. 37, pp. 198-213, Feb.
1992.
[37] N.J. Nilsson, Principles of Artificial Intelligence. Palo Alto, Calif.: Tioga, 1980.
[38] M. Winter and G. Favier, “A Neural Network for Data Association,” Proc. 1999 IEEE Int’l Conf.
Acoustics, Speech, and Signal Processing, vol. 2, pp. 1041-1044, Mar. 1999.
[39] A.M. Aziz, M. Tummala, and R. Cristi, “Fuzzy Logic Data Correlation Approach in
Multisensor-Multitarget Tracking Systems,” Signal Pr ocessing 76, pp. 195-209, Elsevier, 1999.
[40] H. Hong, H. Chong-zhao, Z. Hong-Yan, and W. Rong, “Multi- T arget Tracking Based on
Multi-Sensor Information Fusion with Fuzzy Inference,” Control and Decision, vol. 19, no. 3, pp. 272-276, 2004.
[41] Y.M. Ch en and H.C. Huang, “Fuzzy Logic Approach to Multisensor Data Association,” Math.
and Computers in Simulation 52, pp. 399-412, Elsevier, 2000.
[42] G.H. Wang, S.Y. Mao, and Y.J. Liu, “Triple Threshold Radar-to- ESM Correlation Algorithm
when Each Radar Tra ck Is Specified by a Different Number of Measurements,” IEE Proc.
Radar Sonar Navigation, vol. 147, no. 4, Aug. 2000.
[43] R. Kalman, “A New Approach to Linear Filtering and Prediction Problems,” Trans. ASME, J.
Basic Eng., no. 82, pp. 34-45, 1960.
[44] Y.C. Ho and R.C.K. Lee, “A Bayesian Approach to Problems in Stochastic Estimation and
Control,” IEEE Trans. Automatic Control, 1964.
[45] Y. Bar-Shalom and X.-R. Li, Estimation and Tracking: Principles Techniques and Software.
Artech House, 1993.
[46] D. Willner, C.B. Chang, and K.P. Dunn, “Kalman Filter Algorithm for a Multisensor System,”
Proc 15th IEEE Conf. Decision Control, 1976.
[47] J.B. Gao and C.J. Harris, “Some Remarks on Kalman Filters for the Multisensor Fusion,”
Elsevier Information Fusion, vol. 3, pp. 191-201, 2001.
[48] R. Lobbia and M. Kent, “Data Fusion of Decentralized Local Tracker Outputs,” IEEE Trans.
Aerospace and Electronic Systems, vol. 30, no. 3, July 1994.
[49] P.S. Maybeck, “Stochastic Models, Estimation and Control, Volume 1,” Math. in Science and
Eng., vol. 141-1, Academic Press, 1979.
[50] R. van der Merwe, E.A. Wan, and S. Julier, “Sigma-Point Kalman Filters Nonlinear Estimation
and Sensor Fusion—Applications in Integrated Navigation,” Proc. AIAA Guidance Navigation and Controls Conf., Mar. 2004.
[51] S.J. Julier and J.K. Uhlmann, “A New Extension of the Kalman Filter to Nonlinear Systems,”
Proc. AeroSense: The 11th Int’l Symp. Aerospace/Defense Sensing, Simulation and Controls, Multi Sensor Fusion, Tracking and Resource Management II, 1997.
[52] R. van der Merwe, A. Doucet, N. de Freitas, and E. Wan, “The Unscented Particle Filter,”
Advances in Neural Information Processing Systems (NIPS13), T.K. Leen, T.G. Dietterich, and V. Tresp, eds., MIT Press, Dec. 2000.
[53] S. M cGinnity and G.W. Irwin, “Multiple Model Bootstrap Filter for Manoeuvring T arget
Tracking,” IEEE Trans. Aerospace and Electronic Systems, vol. 36, no. 3, July 2000.
[54] G.A. Ackerson and K.S. Fu, “On State Estimation in Switching Environments,” IEEE Tran s.
Automatic Control, vol. 5, no. 1, 1970.
[55] J.M. Bruckner, H.R.W. Scott, and G.R. Rea, “Analysis of Multimodal Systems,” IEEE Trans.
Aerospace and Electronic Systems, vol. 9, no. 6, pp. 883-888, 1973,
[56] Y. Bar-Shalom and H.A.P. Blom, “The Interact ing Multiple Model Algorithm for Systems with
Markovian Switching Coefficients,” IEEE Trans. Automatic Control, vol. 33, no. 8, Aug. 1988.
[57] E. Mazor, A. Averbuch, Y. Bar-Shalom, and J. Dayan, “Interacting Multiple Model Methods in
Tracking: A Survey,”IEEE Trans. Aerospace and Electronic Systems, vol. 34, no. 1, Jan.
1998.
[58] S. Coraluppi and C. Carthel, “Recursive Track Fusion for Multi- Sensor Surveillance,”
Information Fusion 5, pp. 23-33, 2004.
[59] B. Chen and J.K. Tugnait, “An Interacting Mul tiple Model Fixed Lag Smoothing Algorithm for
Markovian Switching Ssystems,” Proc. 37th IEEE Conf. Decision and Control, Dec. 1998. [60] M. Hadzagic, H. Michalska, and A. Jouan, “IMM-JVC and IMMJPDA for Closely Maneuvering
Targets,” Conf. Record 35 Asilom ar Conf. Signals, Systems, and Computers, vol. 2, pp.
1278-1282 Nov. 2001.
[61] H.A.P. Blom and E.A. Bloem, “Interacting Multiple Model Joint Probabilistic Data Association
Avoiding Track Coalescence,” Proc. 41st IEEE Conf. Decision and Control, Dec. 2002. [62] L. Hong, “An Interacting Multipattern Probabilistic Data Association (IMP-PDA) Algorithm for
Target Tracking,” IEEE Trans. Automatic Control, vol. 46, no. 8, Aug. 2001.
[63] H.A.P. Blom and E.A. Bloem, “Combining IMM and JPDA for Tracking Multiple Maneuvering
Targets in Clutter,” Proc. Fifth Int’l Conf. Information Fusion, vol. 1, pp. 705-712, 2002. [64] I. Hwang, H. Balakrishnan, K. Roy, and C. Tomlin, “Multiple- Target Tracking and Identity
Management in Clutter, with Application to Aircraft Trac king,” Proc. 2004 Control Conf. vol. 4, pp. 705-712, 2004.
[65] L. Hong, “Optimal Multiresolutional Distributed Filtering,” Proc. 31st Conf. Decision and
Control, Dec. 1992.
[66] L. Hong and T. Scaggs, “Real Time Optimal Multiresolutional Sensor/Data Fusion,” Proc. 1993
IEEE Int’l Conf. Robotics and Automation, vol. 2, pp. 117-122, May 1993.
[67] L. Hong, “Multiresolutional Tracking Using the Wavelet Transform,” Proc. 32nd Conf. Decision
and Control, Dec. 1993.
[68] L. Hong, “Multiresolutional Multiple-Model T arget Tracking,” IEEE Trans. Aerospace and
Electronic Systems, vol. 30, no. 2, Apr. 1994.
[69] L. Hong, “Multiresolutional Filtering Using the Wavelet Transform,” IEEE Trans. Aerospace
and Electronic Systems, vol. 29, no. 4, Oct. 1993.
[70] L. Hon g, “Multirate Interacting Multiple Model Filtering for Target Tracking Using Multirate
Models,” IEEE Trans. Automatic Control, vol. 44, no. 7, pp. 1326-1340, July 1999.
[71] L. Hong, “Two Level JPDA-NN and NN-JPDA Tracking Algorithms,” Proc. Am. Control C onf.,
1994.
[72] L. Hong, “Multiresolutional Distributed Filtering,” IEEE Trans. Automatic Control, vol. 39, no. 4,
Apr. 1994.
[73] L. Hong, “Fusing Multiresolutional Data Using Filter Banks,” Proc. Am. Control Conf., vol. 2,
pp. 1309-1313, June 1994.
[74] L. Hong, J.R. Werthmann, G.S. Bierman, and R.A. Wood, “A Multiresolutional Approach to
Target Tracking,” Proc. IEEE 1993 Nat’l Aerospace and Electronics Conf., vol. 1, pp. 388-392, 1993.
[75] T. Fan, C.Y. Yang, S.Y. Mao, and S.H. Li, “Multi-Resolution Multiple-Model Target Tracking
Based on Model Mixing,” Proc. IEEE Int’l Radar Conf., 2000.
[76] I. Errington, “Non-Linear Estimation in Bearings Only Tracking of Manoeuvring Targets,” Proc.
IEE Colloqium on State Estimation in Aerospace and Tracking Applications, Dec. 1989. [77] J. Carpenter, P. Clifford, and P. Fearnhead, “Improved Particle Filter for Non-Linear
Problems,” IEE Proc.—Radar, Sonar, and Navigation, vol. 146, no. 1, pp. 2-7, 1999.
[78] N.J. Gordon, D.J. Salmond, and A.F.M. Smith, “Novel Ap proach to Non-Linear/Non-Gaussian
Bayesian State Estimation,” IEE Proc.-F, vol. 140, no. 2, Apr. 1993.
[79] C. Hue and J.P. Le Cadre, “Sequential Monte Carlo Methods for Multiple Target Tracking and
Data Fusion,” IEEE Trans. Signal Processing, vol. 50, no. 2, Feb. 2002.
[80] G.V. Veres and J.P. Norton, “Improved Particle Filter for Multitarget- Multisensor Tracking with
Unresolved Applications,” IEE T arget Tracking: Algorithms and Applications, vol. 1, pp.
12/1-12/5, 2001.
[81] S. McGinnity and G.W. Irwi n, “Multiple Model Bootstrap Filter for Manoeuvring Target
Tracking,” IEEE Trans. Aerospace and Electronic Systems, vol. 36, no. 3, July 2000.
[82] H.A.P. Blom and E.A. Bloem, “Tracking Multiple Manouvring Targets by Joint Combinations of
IMM and PDA,” Pr oc. 42nd IEEE Conf. Decision and Control, Dec. 2003.
[83] H.A.P. Blom and E.A. Bloem, “Joint IMMPDA Particle Filter,” Proc. Sixth Int’l Conf. Information
Fusion, vol. 2, pp. 785-792, 2003.
[84] J. Liu, M. Chu, J. Liu, J. Reich, and F. Zhao, “Distributed State Representation for Tracking
Problems in Sensor Networks,” Proc. Third Int’l Symp. Information Processing in Sensor Networks, pp. 234- 242, Apr. 2004.
[85] M.S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “A Tutorial on Particle Filters for
Online Nonlinear/Non-Gaussian Bayesian Tracking,” IEEE Trans. Signal Processing, vol. 50, no. 2, Feb. 2002.
[86] A.M. Flynn, “Combining Sonar and Infrared Sensors for Mobile Robot Navigation,” Int’l J.
Robotics Research, pp. 5-14, Dec. 1988.
[87] H. Mart?′nez Barbera′, A. Go′mez Skarmeta, M. Zamora Izquierdo, and J. Botia′ Blaya,
“Neural Networks for Sonar and Infrared Sensors Fusion” Proc. Third Int’l Conf. Information Fusion, vol. 2, pp. WEB4/18-WEB4/25, 2000.
[88] M. Buchberger, K.W. Jorg, and E. von Puttkamer, “Laser Radar and Sonar Based World
Modelling and Motion Control for Fast Obstacle Avoidance of the Autonomous Mobile Robot MOBOTIV,” Proc. IEEE Int’l Conf. Robotics and Automation, pp. 534-539, 1993.
[89] C.C. Chang and K.T. Song, “Ultrasonic S ensor Data Integration and Its Application to
本技术公开了一种基于图像处理的多传感器融合的物体识别方法,包括以下步骤:S1:获取三通道RGB彩色图像及一通道多线激光测距图像;S2:将RGB彩色图像的摄像机光学坐标投射成激光点云坐标,激光点云坐标投射成360°环形全景坐标;S3:利用深度学习的图像识别技术,针对事先训练过的目标进行目标检测框选定,得到目标检测边界框分布图像及物体类别分布图像。本技术方法简单,实时性高,基于多传感器实现六通道图像的映射融合,在传统的RGBD四通道图像的基础上,增加了二通道来源于目标检测的物体类别分布图像、目标检测边界框分布图像,为实现快速准确的目标物体定位提供了精准的图像处理基础。 技术要求 1.一种基于图像处理的多传感器融合的物体识别方法,包括以下步骤: S1:获取三通道RGB彩色图像及一通道多线激光测距图像; S2:将RGB彩色图像的摄像机光学坐标投射成激光点云坐标,激光点云坐标投射成360° 环形全景坐标; S3:利用深度学习的图像识别技术,针对事先训练过的目标进行目标检测框选定,得到 目标检测边界框分布图像及物体类别分布图像。 2.根据权利要求1所述的基于图像处理的多传感器融合的物体识别方法,其特征在于,在步骤S1中,所述三通道RGB彩色图像通过摄像机原始图像获取,所述一通道多线激光测 距图像通过获取激光点云信息后生成独立图层得到。
3.根据权利要求1所述的基于图像处理的多传感器融合的物体识别方法,其特征在于,在步骤S2中,将摄像机坐标投射成激光点云坐标的具体步骤包括: S201:创建3D临时贴图,贴图坐标为激光坐标,贴图大小为单个摄像头贴图转换为激光点云坐标后的宽度和高度; S202:计算贴图下个像素的激光坐标; S203:判断下个像素是否为贴图的结尾像素,若不是则重复步骤S202,若是则进行下一步骤; S204:将八个摄像机贴图合并,拼接生成激光坐标下的360度全景图。 4.根据权利要求3所述的基于图像处理的多传感器融合的物体识别方法,其特征在于,步骤S202的具体计算过程包括: 首先将激光坐标转换成摄像机镜头坐标,再将镜头坐标转换成摄像机像素坐标,最后将对应摄像机像素读取到贴图。 5.根据权利要求1所述的基于图像处理的多传感器融合的物体识别方法,其特征在于,在步骤S2中,将激光点云坐标投射成环形全景坐标的具体步骤包括: S211:创建一个激光点阵图层,大小为1920*1080,左右边缘角度为0—360°,上下角度为-15°—15°,左右边缘角度、上下角度均匀铺展拉伸; S212:读取一列激光点阵存储区数据; S213:计算打印图像的像素角度; S214:计算像素位置,将对应数据赋值到打印的图层; S215:判断当前读取的激光点阵存储区数据是否为数据的结尾,若不是则重复步骤S212—S214,若是则生成图像结束。 6.根据权利要求1所述的基于图像处理的多传感器融合的物体识别方法,其特征在于,在步骤S3中,事先训练过的目标包括目标人员、工作服、安全帽。
多目标跟踪的基本理论 所谓多目标跟踪,就是为了维持对多个目标当前状态的估计而对所接收到的量测信息进行处理的过程。 目标模型不确定性 是指目标在未知的时间段内可能作己知的或未知的机动。一般情况下,目标的 非机动方式及目标发生机动时的不同的机动形式都可以通过不同的数学模型来加 以描述。在进行目标跟踪过程中,采用不正确的目标运动模型会导致跟踪系统跟踪 性能的严重下降。因而在目标跟踪过程中,运动模型采用的正确与否对目标的跟踪 性能是至关重要的。 观测不确定性 是指由传感器系统提供的量测数据可能是外部的干扰数据,它有可能是由杂波、虚警和相邻的目标所引起的,也可能是由被跟踪目标的对抗系统所主动发出来的虚假信息。这种不确定性在本质上显然是离散的,给目标跟踪问题提出了极大的挑战,相应地也就产生了数据关联的问题。 数据关联 数据关联的作用主要有:航迹保持、航迹建立和航迹终结。 数据关联算法主要有:“最近邻”方法,“全邻”最优滤波器方法、概率数据关联滤波器方法、多模型方法、相互作用多模型一概率数据关联滤波器方法、联合概率数据关联滤波器方法、多假设方法、航迹分裂方法。 1.“最近邻”方法的思想是:在落入跟踪波门中的所有量测中,离目标跟踪预测位置最近的量测认为是有效量测。“最近邻”方法的好处是算法最简单,但是精度差,抗杂波干扰的能力差。“最近邻”方法因为简单,算法易实现,因此也是目前广泛采用的一种数据关联算法. 2 .“全邻”最优滤波器 Singer,Sea和Housewright发展了一类“全邻”滤波器,这种滤波器不仅考虑了所有候选回波(空间累积信息),而且考虑了跟踪历史,即多扫描相关(时间累积信息)假定多余回波互不相关并且均匀分布于跟踪门内,则任何跟踪门的体积V内多余回波的数目Cx服从均值为βV的泊松分布。假定在K-1时刻,轨迹a′正确的概率为Pa(k-1)。关键问题是计算k时刻轨迹的正确概率Pa(k)。
非线性卡尔曼滤波与多传感器融合 电信少41 刘星辰 2120406102 (1) 根据题目中给出的量测方程,进行坐标变换,得 ) )(sin(arctan ))()((sin )())(cos(arctan ))()((cos )(,,22,,,,22,,k i k i k k r i k i k i k i k k i k i k k r i k i k i k i k x x y y y y x x r k y x x y y y y x x r k x θθννθννθ+--?+-+-=?=+--?+-+-=?= 以此坐标画图,结果如下: (2) 将非线性问题线性化,新的量测方程为 k r k i k i k v X H Z ,,,+= 其中, ????? ??? ? ??? -+---+----+---+--=0)()() (0 )()()(0)()()(0)()()(2 22 22 22 2,i k i k i k i k i k i k i k i k i k i k i k i k i k y y x x x x y y x x y y y y x x y y y y x x x x H []T k k k k k y y x x X = 扩展卡尔曼滤波算法一个循环如下:
[]1 1 )1()1()1()|1()1|1() 1()'1()|1()1()'1()|1()1()1()1()()'()|()()|1()|1(?)1()1()|1(?)1|1(?--+++-+=+++++=++++++=++=++-++++=++k W k S k W k k P k k P k S k H k k P k W k H k k P k H k R k S k Q k F k k P k F k k P k k z k z k W k k x k k x 将量测方程代入,由于题目中未给出滤波器初值,因此参考作业二中的初值,得到的两个雷达估计的目标状态如下图: 距离均方根误差为 [] ∑=-+-= M i k k k k position y y x x M k RMSE 1 22)?()?( 1 )( 将估计位置、量测位置分别代入上式,得到两个雷达量测和估计的距离均方差,如下图:
Multi-sensor Track-to-Track Fusion Using Simplified Maximum Likelihood Estimator for Maneuvering Target Tracking Li-Wei Fong Department of Information Management Yu-Da College of Business Miaoli, Taiwan ROC Email: fongliwei@https://www.doczj.com/doc/d01590950.html,.tw Abstract—The focus of this paper is to present the distributed architecture of track-to-track fusion for computing the fused estimate from multiple filters tracking a maneuvering target with the simplified maximum likelihood estimator. The architecture consists of sensor-based Kalman filters, local processors and global fuser. Each sensor tracker utilized in the reference Cartesian coordinate system is described for target tracking when the radar measures range, bearing and elevation angle in the spherical coordinate system. The Bar-Shalom track-to-track fusion algorithm is used in each local processor to merge two tracks representing the same target. The decoupled process is adopted to simplify the batch form of the maximum likelihood estimator due to the block-diagonal covariance matrix. The resulting global fuser can be implemented in a parallel structure to facilitate estimation fusion calculation. Simulation results show that the proposed fusion estimator has computational advantages over the maximum likelihood estimator with similar performance. I.I NTRODUCTION Modern engineering applications utilize a great variety of sensors to monitor and control dynamic systems in order to obtain a satisfactory control performance of the certain processes, and thus some appropriate methods are required. Multi-sensor data fusion is defined as the process of integrating information from multiple sources to produce the most specific and comprehensive unified data about an entity, activity or event [1]. In tracking multiple objects environment, multi-sensor fusion algorithms have been applications in air traffic control, tactical defense, robotics, computer vision, industry and other systems where measurements from multiple sensors are used to estimate the states (position, velocity, etc.) of multiple objects [2]. Currently there exist two commonly used architectures for Kalman-filter-based multi-sensor data fusion, including measurement fusion (called centralized architecture) and state-vector fusion (called distributed architecture) [3]. Measurement fusion methods directly fuse the sensor measurements to obtain a weighted or combined measurement and then use a single Kalman filter to obtain the final state estimate based upon the fused observation. State-vector fusion methods use a group of Kalman filters to obtain individual sensor-based state estimates which are then fused to obtain an improved joint state estimate. Points cited in favor of state-vector fusion methods have a lower computation and communication loading and have parallel implementation and fault-tolerance. In distributed fusion architecture, each local sensor sends linearly or nonlinearly processed data to the fusion center. Although, measurement errors due to one sensor are independent from those due to other sensors, the track estimates corresponding to the same target that are computed by the different local processors are correlated due to the common process noises affecting the target dynamics. Track-to-track fusion is an important issue in multi-sensor data fusion which has been widely studied for more than two decades [4-8]. In a distributed multi-sensor environment, there are still several issues of interest in the data fusion tracking algorithm study: 1)How to optimally combine the state estimates from multiple local trackers, namely, the track-to-track fusion with an arbitrary number of sensors. 2)How to fast search the fusion weights to yield near optimal or optimal estimate performance for the real time applications. The goal of this work is to construct a specific processing architecture, shown in Fig. 1, for track formation against a single maneuvering target. In distributed fusion architecture, each sensor-based tracker processes its observation locally to produce sensor tracks, and then communicates to the assigned local processors, the local processors correlate and compute track-to-track estimates and transmit results to the global fuser, and the global fuser merges the local estimates to provide a single global estimate of the targets to be tracked. Each sensor tracker utilized in the Reference Cartesian Coordinate System (RCCS) is described for target tracking when the radar measures range, bearing and elevation angle in the Spherical Coordinate System (SCS). The Bar-Shalom track-to-track fusion algorithm [4] is used in each local processor to merge two tracks representing the same target. The number of the local processors is chosen by 2-combinations of a set with N distinct sensor trackers, called decoupled process, which simplifies the computational structure of the original batch form of the Maximum Likelihood (ML) estimator [6, 7] due to
多传感器数据融合技术的理论及应用 张宁110101256 摘要:多传感器数据融合技术是一门新兴前沿技术。近年来,多传感器数据融合技术已经受到广泛关注,它的理论和方法已经被应用到许多研究领域。本文主要论述了多传感器数据融合的基本概念、工作原理、数据融合特点与结构、数据融合方法及其应用领域,并总结了当前数据融合研究中存在的主要问题及其发展趋势。 关键词:多传感器;数据融合;融合方法 1引言 多传感器数据融合是一个新兴的研究领域,是针对一个系统使用多种传感器这一特定问题而展开的一种关于数据处理的研究。多传感器数据融合技术是近几年来发展起来的一门实践性较强的应用技术,是多学科交叉的新技术,涉及到信号处理、概率统计、信息论、模式识别、人工智能、模糊数学等理论。近年来,多传感器数据融合技术无论在军事还是民事领域的应用都极为广泛。多传感器数据融合技术已成为军事、工业和高技术开发等多方面关心的问题。这一技术广泛应用于复杂工业过程控制、机器人、自动目标识别、交通管制、惯性导航、海洋监视和管理、农业、医疗诊断、模式识别等领域。实践证明:与单传感器系统相比,运用多传感器数据融合技术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存能力,提高整个系统的可靠性和鲁棒性,增强数据的可信度,并提高精度,扩展整个系统的时间、空间覆盖率,增加系统的实时性和信息利用率等。 2基本概念及融合原理 2.1多传感器数据融合概念 数据融合又称作信息融合或多传感器数据融合,对数据融合还很难给出一个统一、全面的定义。随着数据融合和计算机应用技术的发展,根据国内外研究成果,多传感器数据融合比较确切的定义可概括为:充分利用不同时间与空间的多传感器数据资源,采用计算机技术对时间序列获得的多传感器观测数据,在一定准则下进行分析、综合、支配和使用,获得对被测对象的一致性解释与描述,进而实现相应的决策和估计,使系统获得比它的各组成部分更充分的信息。
汽车防盗系统中的多传感器数据融合 一、引言 汽车日益成为人们生活中不可缺少的部分,然而,令汽车用户担忧的是车辆被盗现象呈逐年上升趋势。现在市场上汽车的防盗系统很多,它们都是多传感器的数据融合技术的应用。 二、汽车防盗系统的组成 汽车防盗系统主要由信号采集系统、报警系统、控制系统、通讯系统等组成。本系统的工作原理主要:传感器负责采集信号,一般每一种信号都有两个或两个以上不同种类的传感器负责采集,以保证当一个传感器损坏后不会影响系统的工作。当其中任何一个传感器检测到信号不正常时,传感器就会把信息告知中央处理系统,当中央处理器判定为有用的告警信号后就会立刻启动报警系统。 当中央处理器发出启动报警系统的命令后,视频系统负责记录偷车人的声音和相貌以给公安机关破案提供线索和证据,声光告警系统则会发出刺耳的鸣叫和亮光以惊吓偷车人使其放弃偷车。在防盗系统中通讯系统起着重要的作用,视频系统采集到的声音图像等信息传送给监控中心和车主,以使监控中心能及时的采取措施,如切断汽车油路等。现在的汽车防盗系统一般采用模块化设计,其系统的逻辑框图如图1-1所示。 图1-1
三、汽车防盗系统的传感器说明 3.1微波多普勒传感器 利用多普勒效应制成的传感器可以用来探测人体或物体的移动.该传感器在人或物体靠近时接收器接收的频率发生变化,当频率变化至设定值时,可以判断为有人或物体进入防盗系统的预警范围。 3.2振动传感器 该传感器的功能是将车辆所受外界作用的机械能转换为电信号。其作用是感受车身或车窗是否受到外界机械碰撞;汽车是否被非法升起,监测轮胎与轮毂之间的压力状态;监测驾驶座是否受压,能够对车体特殊频段的振动进行监测。如图是YD69正反转测量霍尔双通道传感器。 3.3倾角传感器 倾角传感器监测车体相对于初始位置是否出现倾角变化,如果这种角度的变是以特定频率出现或达到设定的阈值就可以判断为汽车整体被搬运.如图是一个电压型单轴倾角传感器。
多传感器数据融合 多传感器数据融合1引言数据融合一词最早出现在20世纪70年代末期。几十年来,随着传感器技术的迅速发展,尤其在军事指挥系统中对提高综合作战能力的迫切要求,使其得到了长足的发展。其早期主要是应用在军事上,而随着工业系统的复杂化和智能化,近年来该技术推广到了民用领域,如医疗诊断、空中交通管制、工业自动控制及机械故障诊断等。数据融合是针对一个系统中使用多个传感器这一问题而展开的一种信息处理的新的研究方向,所以数据融合也称为传感器融合。数据融合一直没有一个统一的定义,一般认为:利用计算机技术,对按时间顺序获得的若干传感器的观测信息,在一定的准则下加以自动分析、综合,从而完成所需要的决策和估计任务而进行的信息处理过程称为数据融合。2
数据融合技术的分类多传感器数据融合涉及到多方面的理论和技术如信号处理、估计理论、不确定性理论、模式识别最优化技术、神经网络和人工智能等。很多学者从不同角度出发提出了多种数据融合技术方案。从技术原理角度,可分为假设检验型数据融合、滤波跟踪型数据融合、聚类分析型数据融合、模式识别型数据融合、人工智能型数据融合等;按判决方式分有硬判决型和软判决型数据融合;按传感器的类型分有同类传感器数据融合和异类传感器数据融合按对数据的处理方式,可分为象素级融合、特征级融合和决策级融合;从方法来分有Bayes推理法、表决法、D-S 推理法、神经网络融合法等。从解决信息融合问题的指导思想或哲学观点加以划分,可分为嵌入约束观点、证据组合观点和人工神经网络观点三大类。3常用的数据融合方法数据融合方法种类繁多,图1归纳了常用的一些信息融合方法。估计方法
目标跟踪信息融合及仿真程序 质心算法是最简单的定位算法,如图2-1所示,四个小圆为观测站,实线三角形是目标真实的位置,假设四个圆形观测站都探测到目标的存在,则根据质心定位算法,目标的位置(x,y )可以表示为:4 4 321x x x x x +++= , 4 4 321y y y y y +++= ,这里观测站得位置为),(i i y x ,同理,当观测站数目为N 时,这时候的质心定位算法可以表示为: ???? ? ? ??????=??????∑∑==N i i N i i y N x N y x 11 11 图1 质心定位 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% % 质心定位算法Matlab 程序 %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% function main % 定位初始化 Length=100; % 场地空间,单位:米 Width=100; % 场地空间,单位:米 d=50; % 目标离观测站50米以内都能探测到,反之则不能 Node_number=6; % 观测站的个数 for i=1:Node_number % 观测站的位置初始化,这里位置是随机给定的 Node(i).x=Width*rand; Node(i).y=Length*rand; end % 目标的真实位置,这里也随机给定 Target.x=Width*rand; Target.y=Length*rand; % 观测站探测目标 X=[]; for i=1:Node_number
静止背景下的多目标追踪 随着计算机技术以及智能汽车行业的发展,多目标的检测与追踪的实用性与研究价值逐渐提高。在计算机视觉的三层结构中,目标跟踪属于中间层,是其他高层任务,例如动作识别以及行为分析等的基础。其主要应用可包括视频监控,检测异常行为人机交互,对复杂场景中目标交互的识别与处理,以及虚拟现实及医学图像。 目标跟踪又包括单目标跟踪和多目标跟踪。单目标跟踪可以通过目标的表观建模或者运动建模,以处理光照、形变、遮挡等问题,而多目标跟踪问题则更加复杂,除了单目标跟踪回遇到的问题外,还需要目标间的关联匹配。另外在多目标跟踪任务中经常会碰到 目标的频繁遮挡、轨迹开始终止时刻未知、目标太小、表观相似、目标间交互、低帧率等等问题。 静止背景下的多目标追踪可分为两步来实现,第一步是在视频文件的每帧中检测出移动的目标,第二步是将检测到的目标与跟踪轨迹实时匹配。在本次实验中,利用混合高斯模型进行背景减除,使用形态学操作消除噪声,通过卡尔曼滤波预测目标位置,最后利用匈牙利算法进行匹配,实现静止背景下的多目标追踪。 1 实验原理 1.1 混合高斯模型 单高斯模型是利用高维高斯分布概率来进行模式分类: 11()exp[(x )(x )] 2T x N C μσμ-=--- 其中μ用训练样本均值代替,σ用样本方差代替,X 为d 维的样本向量。通过高斯概率公式就可以得出类别C 属于正(负)样本的概率。 而混合高斯模型就是数据从多个高斯分布中产生,每个GMM 由k 个单高斯分布线性叠加而成。相当于对各个高斯分布进行加权,权系数越大,那么这个数据属于这个高斯分布的可能性越大。 (x)(k)*p(x |k)P p =∑ 利用混合高斯模型(GMM)可以进行背景减除,将前后景分离,得到移动的目标。对每个像素点建立由k 个单高斯模型线性叠加而成的模型,在这些混合高斯背景模型中,认为像素之间的颜色信息互不相关,对各像素点的处理都是相互独立的。单个像素点在t 时刻服从混合高斯分布概率密度函数: ,,,1 (x )(x ,,)k t i t t i t i t i p w ημτ==∑ 其中k 为分布模式总数, ,,(x ,,)t i t i t ημτ为t 时刻第i 个高斯分布,,i t μ为其均值,,i t τ为其协方差矩阵。 在获得新一帧图像后更新混合高斯模型。用图像中的每个像素点与混合高斯模型匹配,如果成功则判定该点为背景点, 否则为前景点。当背景更新完成后,高
制造系统多信息融合及应用 A:简答题 1、简述多信息融合的目的是什么?信息融合的典型问题与方法有哪些? 答:多信息融合是指用多信息源对事物的不同侧面、不同阶段、不同深度进行融合决策,以获得完整全面的预测,避免单一信息源的片面偏差。它的主要目的是有效组织与利用能够获得的多种信息资源,提供比只采用其中部分信息资源获得更准确、更可靠、更协调、更经济与更稳定的决策结果。 典型问题有:(1)问题:传感感知的多数据源和多信息源具有不同的感知机理和不同数据类型(即异类);多源数据和信息之间常常不能保持同步;感知的时空范围中目标、时间或者更复杂的态势可能存在变化等,方法:传感感知事件的时空协同、动态协同,面向目标、事件或者复杂态势的合适的控制等。(2)输入的数据类型可能存在差异,方法:引入来自外部参数系统的定位信息等,研究有针对性的解决方法等。(3)不同事件(特征)集中的“目标”数目不一致;输入数据含糊、不一致、冲突或不可靠;输入数据相关的噪声/误差,方法:产生一组可能表示现实世界的模型假设。利用方法选择与获取数据最接近的假设等。(4)决策对象可能比较复杂,具有多目标或者多时间、多层次和多侧面处理需求,复杂的动态(如态势和威胁)的表达和处理模式,方法:利用多层次的概念,包括对象的多层次、处理的多层次、元模型的多层次、多侧面处理等;针对不同层次研究具体的适用理论方法和处理结构;多远信息的协同分析;建立专门的融合评价平台等。 2、如何理解信息融合的层次?对于特定系统对象,试比较数据层融合与特征层融合在有效性方面的区别? 答:信息融合的层次有两个层次的含义:一层含义是直接针对融合单元的输入输出关系的表述,这些关系中最常见的有数据-数据对、特征-特征对和决策-决策对,于是形成了数据层融合、特征层融合和决策层融合;另一层含义是针对和整个融合决策任务来说的,依据融合任务的主体情况,任务主导的输入-输出需求,确定数据、特征、决策三层的划分。 区别:进行数据层融合的数据集可以来自不同的传感器和(或者)不同的信息源,数据层融合结果一般是数据,可以通过算法提供相应的特征;特征层融合的输入特征可能来自不同数据层融合的结果、也可能来自其他直接提供特征的信息源或者渠道,特征层输出可以直接形成相应的决策。 3、数据关联有哪些类型,如何将异源、异构数据进行关联? 答:数据关联分为静态数据关联和动态数据关联,静态数据关联存在三种典型情况:具有同样维数的多传感器的数据关联、具有不同维数的多传感器的数据关联和具有多个站点的多传感器的数据关联。 对象代理模型可以作为数据集成的一种通用的数据模型,它也是能够很好地解决各个异
1.多传感器数据融合的结构形式有串联型融合,并联型融合,混联型融合。 2. 3 4自校准层中用到的算法包括自适应加权算法、和(贝叶斯估算法,分布图与分批估计算法)。 5传感器一般由敏感元件,转换元件,测量电路,辅助电路等组成。 6机器人由机械部分、传感部分、控制部分三大部分组成。 7.智能传感器是由传感器和微处理器相结合而构成。 8.根据信息融合处理方式的不同,可以将多传感器信息融合系统结构分为集中、分散、混合、反馈型等。 9.常用的多传感器信息融合方法可以分为以下四大类。 10.根据处理对象的层次不同,可以将信息融合分类为数据层融合、特征层融合、决策层融合。 12.11.序号跳了, 13.11、12并没有题目。 14.机器人的机械结构系统由机械构件和传动机构组成。 15.机器人的运动方式主要有、、、及。 16.机器人传感器分为内部传感器和外部传感器两种。 17.多传感器信息融合过程主要包括A/D、数据预处理、特征值提取、和融合计算等环节。 18.智能传感器的硬件结构模块要由以下六个部分组成一个或多个敏感器件、微处理器或为控制器、非易失性可擦写存储器、双向数据通信的接口、模拟量输入输出接口、高效的电源模块。 19.传感器的标定可分为动态标定和静态标定。 20.传感器按构成原理分类为结构型和物性型。 21.压电传感器是根据压电效应制造而成的。 22.机器人的机械结构系统中的机械构件由机身、手臂和末端执行器三大件组成。 23.机器人驱动系统的驱动方式主要有液压、气压和电气。 24.机器人内部传感器主要包括位置、速度、加速度、倾斜角、力觉传感器等五种基本种类。 25.智能传感器是由传感器和微处理器相结合而构成的。第7题重复 26.多传感器信息融合的常用方法可以分为估计、分类、推理、人工智能四大类。 26.传感器按能量关系分类为能量转换和能量控制型;按基本效应分类分为物理、化学、生物型。第19题合并 27传感器进行动态特性标定时常用的标准激励源有周期函数和瞬变函数两种。 28机器人的机械结构系统由机械构件和传动系统组成。第13题重复 29机器人外部传感器主要包括视觉传感器、触觉、接近度、激光等基本种类。 30.智能传感器的实现方式主要有非集成化的模块方式、集成化实现和混合实现三种形式。 31.多传感器信息融合的系统结构分为集中、分散、混合、反馈型四大类。第8题重复 32.机器人电器驱动系统中,马达是其执行元件。
万方数据
万方数据
万方数据
一种基于多传感器多目标跟踪数据的时间对准方法 作者:李政, 谭伟, 马红江, 杜营营, 陆百川, LI Zheng, TAN Wei, MA Hongjiang, DU Yingying, LU Baichuan 作者单位:重庆交通大学交通运输学院,重庆,400074 刊名: 交通信息与安全 英文刊名:COMPUTER AND COMMUNICATIONS 年,卷(期):2011,29(1) 被引用次数:1次 参考文献(10条) 1.梁凯;潘泉;宋国明多传感器时间对准方法的研究[期刊论文]-陕西科技大学学报(自然科学版) 2006(03) 2.严朝系统误差校正中的时间对准问题研究 2009(05) 3.罗素云AIS与雷达目标位置数据融合方法的研究[学位论文] 2003 4.张震龙不确定性推理与时空对准技术研究[学位论文] 2005 5.Baichuan L U;Meiling H Traffic flow predict-ion based on wavelet analysis,genetic algorithm and artificial neural network Proceedings 2009 6.夏伟;李朝辉;常春藤MATLAB控制系统仿真与实例详解 2008 7.Jun M A;Li Xiaodong;Meng Ying Research of urban traffic flow forecasting based on neural network [期刊论文]-Acta Electronica Sinica 2009(05) 8.郝勇;范君晖系统工程方法与应用 2007 9.陈杰MATLAB宝典 2006 10.Shen Ying;Xue An-ke;WANG Rui-rong Application of curve-fitting in evaluation for information fusion system[期刊论文]-Journal of Hangzhou Institute of Electronic Engineering 2005(02) 本文读者也读过(10条) 1.魏武.张起森.黄心汉.WEI Wu.ZHANG Qi-sen.HUANG Xin-han一种基于多传感器的交通监控系统智能接口[期刊论文]-长沙交通学院学报2000,16(3) 2.李兆展.林艳红.李若仲.Li Zhaozhan.Lin Yanhong.Li Ruozhong制导雷达组网多站数据的时间对准问题研究[期刊论文]-战术导弹技术2010(1) 3.万琦AIS在广州交管系统中的应用分析[会议论文]-2002 4.李云.郝钢.张玉茹.LI Yun.HAO Gang.ZHANG Yu-ru自校正分布式观测融合Kalman估值器[期刊论文]-哈尔滨商业大学学报(自然科学版)2011,27(1) 5.李政.谭伟.马红江.杜营营.陆百川一种基于多传感器多目标跟踪数据的时间对准方法[会议论文]-2010 6.刘利频.温慧英.徐建闽.Liu Lipin.Wen Huiying.Xu Jianmin多类型传感器实时交通数据采集和车型自动分类系统设计[期刊论文]-交通与计算机2005,23(1) 7.孙为民.周永丰.Sun Weimin.Zhou Yongfeng时间对准误差分析实验[期刊论文]-舰船电子工程2006,26(3) 8.郝钢.叶秀芬.HAO Gang.YE Xiu-fen多传感器加权观测融合自适应UKF滤波器[期刊论文]-宇航学报2011,32(6) 9.杜磊.王党卫.姚迪多源目标数据融合方法设计与实现[期刊论文]-科技信息2011(13) 10.李莉.LI Li时间配准在多传感器数据处理中的应用[期刊论文]-仪器仪表用户2011,18(3) 引证文献(1条) 1.斯海林.李标.邓天民城市3D GIS实景采集中多传感器的时空配准研究[期刊论文]-公路与汽运 2013(4)
多目标跟踪算法 先来回顾下卡尔曼滤波器: 假定k k x |表示当前k 时刻目标的状态,k 1k x |+表示下一个时刻目标的状态,k z 则表示k 时刻的实际观测。一般地模型都假定为线性的: 这里的1k x +为k+1时刻目标的状态,k x 为k 时刻的状态,为状态转移矩阵,而是服从均值为0方差为的正态分布,表示由噪声等引起的干扰。卡尔曼滤波采取初步估 计: 这里的估计只是初步的估计,状态估计与实际状态的误差矩阵等于状态1k x +的的方差,即: 更新(修正): 这里已知了实际观察,同样是假定观测与状态的似然关系是线性的,即满足: 服从一个均值为0方差为 的正态分布。 卡尔曼滤波器给出了经过更新后得到的比较合理的k+1时刻的估计为: 相应地得到了更新后方差的估计: 这里: 其实这些都是通过最小二乘法推出来的,即使得误差: 最小,而初步估计也是通过最小二乘法获得,即使得: 最小。有了上述估计方程后,便可以获得一个估计流程:
下面再介绍下贝叶斯公式 先看一个定义 马氏链: 设{} ,,,k j i E =为有限集或可列集,称()0n n X ≥为定义在概率空间()P F,,Ω上,取值于空间E 的马氏链,如果满足下面的马氏性:对一切n 10i i i ,,, 有 [][]1n 1n n n 1n 1n 00n n i X i X P i X i X i X P ----======|,,| 若左边的条件概率有定义,则称[]i X j X P 1n n ==-|为在n-1时刻状态为i,在n 时刻在j 的转移概率函数,若它与n 无关,则记为ij p ,并称为时齐的或齐次的。显然这里的马氏性接近于独立性,在一定程度上可以称为无记忆性或无后效性。 下面我们来推导贝叶斯公式: 容易由条件概率公式定义知 而 ()()()()()()( ) ()() ()( ) ()() ( )() ()()() 1 k 1 k 1k k k 1 k k 1k k k 1k k 1k k k 1k k k k k 1k 1k 1k k k 1k k k k k 1k 1k 1k k k 1k 1k 1k k k 1k 1k 1k 1k 1k z x f dx x f x z f x f x z f z f dx x f x z f x z f z f x f x z f x z f dx z x f x z f z x f x z f x f +++++++++++++++++++++++== ? == ?? ?||||||||||||||||||||||||| 就得到了更新后的公式如下: 这里记 于是就可以得到贝叶斯滤波器跟踪流程如下: 实际上可以证明,卡尔曼滤波器是贝叶斯滤波器的一种特殊形式,由于假定噪声服从正态分布,同样地观测与状态估计的误差也是服从正态分布,那么不难得:
一、背景介绍: 多传感器数据融合是一种信号处理、辨识方法,可以与神经网络、小波变换、kalman 滤波技术结合进一步得到研究需要的更纯净的有用信号。 多传感器数据融合涉及到多方面的理论和技术,如信号处理、估计理论、不确定性理论、最优化理论、模式识别、神经网络和人工智能等。多传感器数据融合比较确切的定义可概括为:充分利用不同时间与空间的多传感器数据资源,采用计算机技术对按时间序列获得的多传感器观测数据,在一定准则下进行分析、综合、支配和使用,获得对被测对象的一致性解释与描述,进而实现相应的决策和估计,使系统获得比它的各组成部分更充分的信息。 多传感器信息融合技术通过对多个传感器获得的信息进行协调、组合、互补来克服单个传感器的不确定和局限性,并提高系统的有效性能,进而得出比单一传感器测量值更为精确的结果。数据融合就是将来自多个传感器或多源的信息在一定准则下加以自动分析、综合以完成所需的决策和估计任务而进行的信息处理过程。当系统中单个传感器不能提供足够的准确度和可靠性时就采用多传感器数据融合。数据融合技术扩展了时空覆盖范围,改善了系统的可靠性,对目标或事件的确认增加了可信度,减少了信息的模糊性,这是任何单个传感器做不到的。 实践证明:与单传感器系统相比,运用多传感器数据融合技术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存能力,提高整个系统的可靠性和鲁棒性,增强数据的可信度,并提高精度,扩展整个系统的时间、空间覆盖率,增加系统的实时性和信息利用率等。信号级融合方法最简单、最直观方法是加权平均法,该方法将一组传感器提供的冗余信息进行加权平均,结果作为融合值,该方法是一种直接对数据源进行操作的方法。卡尔曼滤波主要用于融合低层次实时动态多传感器冗余数据。该方法用测量模型的统计特性递推,决定统计意义下的最优融合和数据估计。 多传感器数据融合虽然未形成完整的理论体系和有效的融合算法,但在不少应用领域根据各自的具体应用背景,已经提出了许多成熟并且有效的融合方法。多传感器数据融合的常用方法基本上可概括为随机和人工智能两大类,随机类方法有加权平均法、卡尔曼滤波法、多贝叶斯估计法、产生式规则等;而人工智能类则有模糊逻辑理论、神经网络、粗集理论、专家系统等。可以预见,神经网络和人工智能等新概念、新技术在多传感器数据融合中将起到越来越重要的作用。 数据融合存在的问题 (1)尚未建立统一的融合理论和有效广义融合模型及算法; (2)对数据融合的具体方法的研究尚处于初步阶段; (3)还没有很好解决融合系统中的容错性或鲁棒性问题; (4)关联的二义性是数据融合中的主要障碍; (5)数据融合系统的设计还存在许多实际问题。 二、算法介绍: 2.1多传感器数据自适应加权融合估计算法: 设有n 个传感器对某一对象进行测量,如图1 所示,对于不同的传感器都有各自不同的加权因子,我们的思想是在总均方误差最小这一最优条件下,根据各个传感器所得到的测量值以自适应的方式寻找各个传感器所对应的最优加权因子,使融合后的X值达到最优。