第43卷增刊(I )2013年7月
东南大学学报(
自然科学版)
JOURNAL OF SOUTHEAST UNIVERSITY (Natural Science Edition )
Vol.43Sup (I )July 2013
doi :10.3969/j.issn.1001-0505.2013.S1.038
基于Kinect 传感器的移动机器人
室内环境三维地图创建
杨
鸿
钱
堃
戴先中
马旭东
房
芳
(东南大学自动化学院,南京210096)
(东南大学复杂工程系统测量与控制教育部重点实验室,南京210096)
摘要:针对移动服务机器人在未知室内环境下的三维感知问题,提出了一种基于低成本Kinect
传感器的三维地图创建实用方法.对于机器人在运动过程中连续采集的多帧RGB-D 信息,首先
利用SURF 算子对RGB 图像提取稳定特征点并进行特征点匹配,然后结合深度图像,采用RANSAC 算法剔除可能存在的误匹配点并完成初始配准,从而估计得到图像帧间粗略的相对转移关系,最后运用广义ICP 算法对采集的深度图像进行精确配准,得到拼接的三维点云图.在此基础上进一步开发了移动机器人三维地图创建应用系统,实验验证了该方法的可行性和有效性.关键词:Kinect 传感器;SURF ;地图创建;广义ICP ;移动机器人中图分类号:TP24
文献标志码:A
文章编号:1001-0505(2013)增刊(I )-
0183-05Kinect-based 3D indoor environment map building for mobile robot
Yang Hong
Qian Kun
Dai Xianzhong
Ma Xudong
Fang Fang
(School of Automation ,Southeast University ,Nanjing 210096,China )
(Key Laboratory of Measurement and Control of Complex Systems of Engineering of Ministry of Education ,
Southeast University ,Nanjing 210096,China )
Abstract :For the 3D perception problem of mobile service robots in unknown indoor environments ,
a practical approach to building 3D maps using a low -cost Kinect sensor is proposed.Successive
frames of RGB-D (red-green-blue-depth )information are captured during the robot's movements.
First ,SURF (speeded up robust features )detector is applied to color images for extracting and matc-hing stable feature points.Combined with depth images ,initial registration procedure is then per-formed by using the RANSAC (random sample consensus )algorithm for eliminating possible mistake matching points and thus the relative transformation between frames can be estimated.Finally ,a generalized ICP (iterative closest point )algorithm is employed to perform fine registration on cap-tured depth images ,which finally produces 3D point cloud mosaic.In addition ,an application sys-tem of mobile robot 3D mapping is developed.Experimental results validate the practicability and ef-fectiveness of the approach.
Key words :Kinect sensor ;SURF (speeded up robust features );map building ;generalized ICP (it-erative closest point );mobile robot 收稿日期:2013-05-16.作者简介:杨鸿(1989—),男,硕士生;钱堃(联系人),男,博士,讲师,
kqian@seu.edu.cn.基金项目:国家自然科学基金资助项目(61075090,61005092,61105094,61175091)、东南大学复杂工程系统测量与控制教育部重点实验室
开放课题基金资助项目(MCCSE2012B02).引文格式:杨鸿,钱堃,戴先中,等.基于Kinect 传感器的移动机器人室内环境三维地图创建[
J ].东南大学学报:自然科学版,2013,43(S1):183-187.[doi :10.3969/j.issn.1001-0505.2013.S1.038]
移动服务机器人要在环境中自主完成抓取作业等典型服务功能,必须明确工作空间的环境表达方法,创建三维地图有助于为其提供更为丰富、准
确的广义环境信息.
目前,针对二维地图自主创建的理论方法已经得到了深入研究,但对三维环境地图的自主构建,
特别是结合图像外观分析方法的地图构建研究仍然不足.三维环境建模最常用的方式为基于体素(voxel)的方法,即将机器人周边环境划分为三维几何体(例如等体积的立方体),采用几何体的占据状态来表示环境[1-3],然而这种方法对非结构化的环境表示能力有限.另一种表示方法为采用范围传感器测量获得的深度点云来表示环境模型[4-5].利用点云构建三维环境地图的方法大多利用精度高、价格昂贵的三维激光扫描器.
视觉传感器具有方便经济、信息量大等优点.Kinect是微软公司开发的一款体感外设,其核心设备由彩色摄像机、红外线发射器和红外线CMOS 摄影机组成.与激光传感器相比,Kinect能够快速地同时获取场景彩色图像和深度信息,且其不受环境可见光谱干扰,成本更为低廉[6],适用于室内导航精度要求不高的情况.Henry等[7]提出了一个基于Kinect的交互式的三维重建系统,但是该系统依靠关键帧的选取,计算量大、时间复杂度高,难以用于移动机器人三维地图在线创建.
本文开发了基于Kincet传感器的实时三维地图构建实用方法.经过标定后的Kinect深度摄像头和RGB摄像头直接关联,通过提取彩色图像特征点,计算出特征点在深度点云空间中相应的三维坐标;根据彩色图像配准过程重建的运动结构信息,指导多帧深度点云的拼接,形成统一坐标系下的三维地图.地图创建过程分为图像数据预处理和点集匹配两大步骤循环进行.首先,针对精度和实时性要求,采用SURF(speeded up robust features)算子提取图像特征点并进行帧间匹配.针对迭代算法中存在的计算量过大、匹配效率低下的问题,本文首先采用RANSAC(random sample consensus)算法排除可能存在的误匹配点的影响,有效提高了匹配速度;精确匹配阶段采用广义ICP(iterative closest point)算法迭代求取变换参数,克服了传统ICP算法可能使得迭代过程无法收敛到全局最优解的缺点,确保整个算法的鲁棒性.
1复杂场景的特征点
1.1特征点提取
常用的特征点检测方法有Harris角点检测[8],SIFT[9],SURF[10]等.由于经典的SIFT算子时间复杂度高、计算数据量大,本文采用具有尺度不变性、旋转不变性的SURF算子,以获得鲁棒性、稳定性更好的特征点检测结果.SURF特征点提取过程可分为2步:
①基于尺度空间理论的特征点检测.在图像金字塔的每一层使用Hessian矩阵的行列式来判别各个尺度的极值,得到稳定的特征点位置及所在的尺度值.SURF算法中用方框滤波(box filters)近似代替二阶高斯滤波,提高了卷积计算速度.
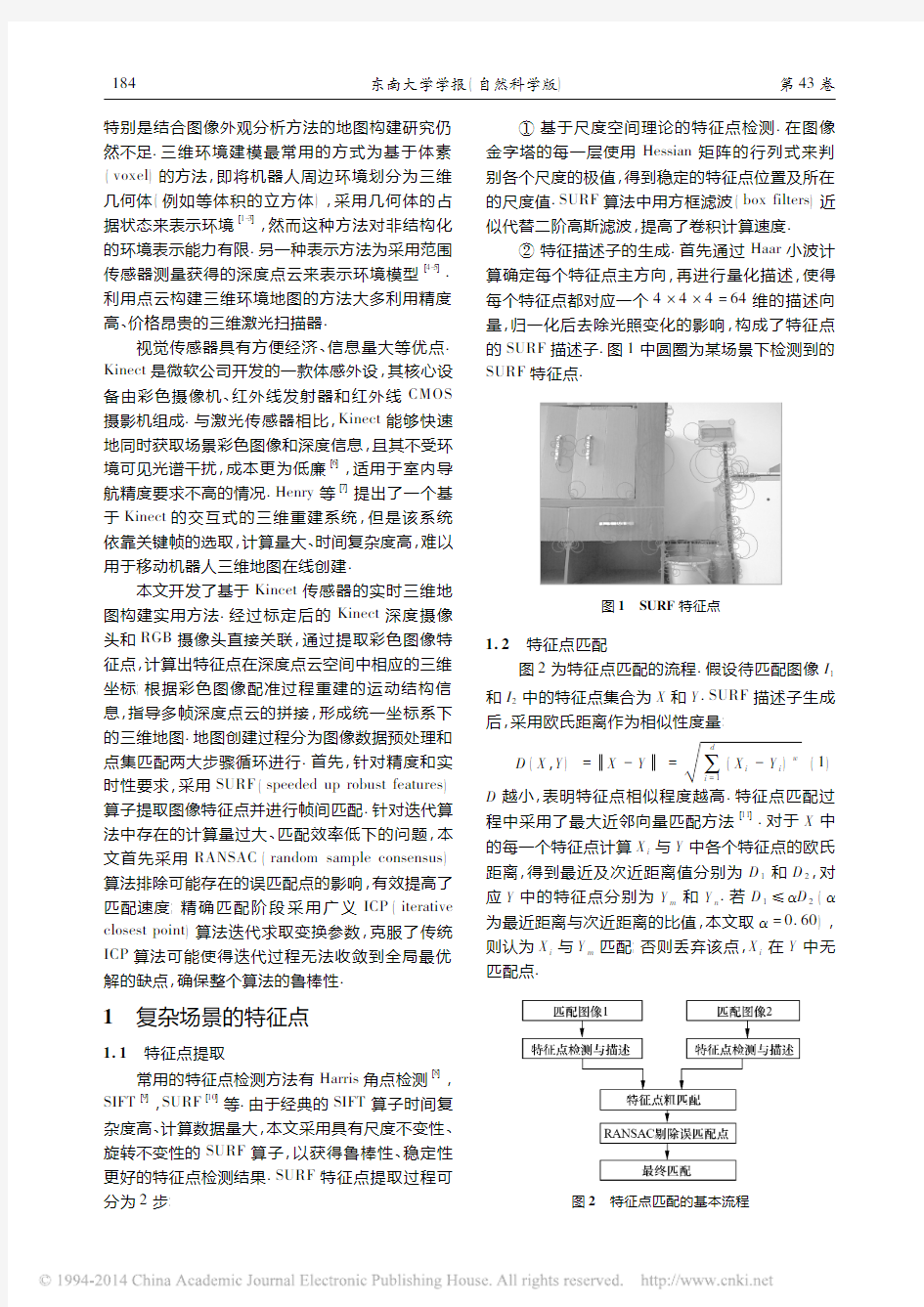
②特征描述子的生成.首先通过Haar小波计算确定每个特征点主方向,再进行量化描述,使得每个特征点都对应一个4?4?4=64维的描述向量,归一化后去除光照变化的影响,构成了特征点的SURF描述子.图1中圆圈为某场景下检测到的SURF特征点
.
图1SURF特征点
1.2特征点匹配
图2为特征点匹配的流程.假设待匹配图像I1和I2中的特征点集合为X和Y.SURF描述子生成后,采用欧氏距离作为相似性度量:
D(X,Y)=X-Y=∑d
i=1
(X
i
-Y
i
)
槡w(1)D越小,表明特征点相似程度越高.特征点匹配过程中采用了最大近邻向量匹配方法[11].对于X中的每一个特征点计算X i与Y中各个特征点的欧氏距离,得到最近及次近距离值分别为D1和D2,对应Y中的特征点分别为Y m和Y n.若D1≤αD2(α为最近距离与次近距离的比值,本文取α=0.60),则认为X i
与Y m匹配;否则丢弃该点,X i在Y中无匹配点.
图2特征点匹配的基本流程
481东南大学学报(自然科学版)第43卷
2由粗到细的分层配准
由于物体常被遮挡,在扫描生成图像数据的过程中深度图像难以覆盖物体的表面,需要从多个角度采集物体表面不同区域的深度信息,并保证它们之间保持一定的重叠区域.由这些重叠区域的数据并利用配准算法,求出各个深度图像间的相对运动关系,把它们变换到统一的坐标系下,生成完整的环境描述.
2.1RANSAC算法初始配准
匹配误差对变换矩阵的求解影响很大.为了提高矩阵中参数估计的精度,采用RANSAC算法[12]来剔除不准确的匹配点,排除可能存在的误匹配点的影响,求出图像帧的初始变换,使得2组数据的点集的公共区域能够大致重合,为下一步的精确匹配做准备.
RANSAC充分利用了所有的初步匹配点,根据一个容许误差将所有的匹配点对分为内点和外点.由于一般的特征误差都会满足正态分布,设定阈值d(实验中d=3.00),舍去误差大于d的匹配点对(外点);记误差小于d的匹配点对为内点,用来进行参数估计.
2.2广义ICP算法精确配准
设有2个三维点集X={x1,x2,…,x n}和Y=
{y
1,y
2
,…,y
n
},利用ICP算法[13]求取空间变换T
(包括旋转矩阵和平移矩阵),使得X经过T变换后的集合X'和Y(固定)的残留误差最小.
本文采用了广义的迭代最近点算法[14]来进行图像间的精确配准.它与ICP算法的主要区别是在计算残留误差E时引入了概率模型,通过最小化X'和Y的残留误差函数来找到变换矩阵T.广义ICP配准算法如下:
算法1广义ICP配准算法
输入:点云X={x i},Y={y i},初始变换矩阵T0;
输出:T.
T←T
While not converged do
For i←1to N do
//计算对应最近点
m
i
←FindClosestPointInA(T·x i);
M←{m
i
};
//按条件赋予权值
w
i
←(m i-T·x i≤d max)?1:0
End
T←arg min
T
E
End
在概率模型下,假设存在点集^X={^x i}和^Y=
{^y
i
},使得x
i
,y
i
服从正态分布x i N(^x i,C X i),y i
N(^y
i
,C Y
i
),其中{C X
i
}和{C Y
i
}是与测量点云相关的协方差矩阵.定义d i=y i-Tx i,那么变换矩阵T需要满足
T=arg min
T
∏
i
p(d
i
)=arg max
T
∑
i
log(p(d
i
))
(2)化简残留误差E得到
E=∑
i
d T
i
(C Y
i
+TC X
i
T T)-1d
i
(3)传统ICP算法中E=∑
i
d
i
2,可以看成是广义ICP中C X i=θ,C Y i=I的一类特殊情况.对广义ICP算法的详细介绍可参阅文献[14],值得注意的是,寻找对应点对的过程仍然是通过计算数据点之间的欧氏距离,这样做是为了便于采用k-d树的方法来进行加速,保证了改进后算法的效率.在精确配准过程中,使用初始配准后2个点集的位置作为新的初始位置,具体过程如下:
①对X中的每个点计算其在Y中的最近点,使用k-d树进行加速,将所有最近点对构成的集合记作M.
②求得使对应点对平均距离最小的刚体变换矩阵T.
③对待匹配点集X进行变换,得到新的变换点集.
④通过迭代计算极大似然估计值判断残留误差函数E是否最小,如果是,则停止计算;否则X'将作为新的X,返回步骤②,直到满足条件.
⑤T即为所求的二次配准参数,精细配准结束.
3实验结果及分析
机器人导航平台PX-1如图3所示,处理器为一台Intel双核2.00GHz主频的PC机,运行Ubuntu11.04Linux操作系统.Kinect安装在移动机器人甲板上方,距离地面竖直高度为42cm.图
4
图3机器人导航平台PX-1
581
增刊(I)杨鸿,等:基于Kinect传感器的移动机器人室内环境三维地图创建
图4
真实测试环境
图5机器人测试运动轨迹
是实验所处的环境,图5是用激光传感器实现创建
的二维地图及机器人测试运动轨迹,激光传感器扫描高度为30cm.采用基于激光创建的二维地图作为基准参照.
实验过程中机器人按照上述路径移动,
PC 机处理采集到的图像帧,当特征点对少于50组时,将舍弃该帧数据,
不进行初始配准.另外,当移动机器人转动角度小于2?或者移动距离小于5cm 时也会自动忽略该帧数据.采用本文方法最终得到环境的三维点云如图6(a )所示.图6(b )是由三维地图的点云垂直投影到水平面后得到的二维地图,对比
图5中的虚线框内部分,可发现由Kinect 获取的地图数据具有很高的精度
.
图6创建的三维地图及其投影结果将Kinect 传感器RGB 摄像头同时捕捉到的环境彩色信息映射到相应的三维点云模型中,实际效果如图7所示.对比图4可看出,
重建后的三维场景基本与真实场景一致.实验过程中,当Kinect 的视角偏转角度较小时,使用本文方法对室内环境进行三维地图创建的效果比较理想.当偏转角度过大时,就会丢失图像中的特征点,导致前后两帧图
像无法成功匹配.其次,
由于Kinect 传感器获取视察图的最小有效距离大约是0.5m ,对于室内一些
体积较小的物体,无法获得稠密的点云
.
图7
三维地图渲染结果
4结语
本文提出了一种基于Kinect 传感器的三维地
图创建方法.该方法利用Kinect 传感器所采集的彩色图像信息来指导深度点云的配准,从而比其他在三维点云中直接配准的方法大大提高了计算效率.将该方法用于移动机器人在室内环境中进行三维地图创建,实验结果验证了其有效性.
参考文献(References )
[1]Moravec H P.Robot spatial perception by stereoscopic
vision and 3D evidence grids [
R].Pittsburgh ,Pennsyl-vania ,USA :Robotics Institute ,Carnegie Mellon Uni-versity ,1996.
[2]Wurm K M ,Hornung A ,Bennewitz M ,et al.Octo-Map :a probabilistic ,flexible ,and compact 3D map representation for robotic systems [C /OL ]//Proceed-ings of the ICRA 2010Workshop on Best Practice in 3D Perception and Modeling for Mobile Manipulation.An-chorage ,Alaska ,USA ,2010.http ://ais.informatik.uni-freiburg.de /publications /papers /wurm10octomap.pdf.
[3]Ryde J ,Hu H S.3D mapping with multi-resolution oc-cupied voxel lists [J ].Autonomous Robots ,2010,28(2):169-185.
[4]Cole D M ,Newman P M .Using laser range data for
3D SLAM in outdoor environments [C ]//IEEE Interna-tional Conference on Robotics and Automation.Orlan-
do ,Florida ,USA ,2006:1556-1563.
681东南大学学报(自然科学版)第43卷
[5]Nüchter A,Lingemann K,Hertzberg J,et al.6D SLAM-3D mapping out door environments[J].Journal
of FieldRobotics,2007,24(8/9):699-722.
[6]刘鑫,许荣华,胡占义,等.基于GPU和Kinect的快速物体重建[J].自动化学报,2012,38(8):1288-1297.
Liu Xin,XuRonghua,Hu Zhanyi,et al.GPU based
fast3D-object modeling with Kinect[J].Acta Automati-
ca Sinica,2012,38(8):1288-1297.(in Chinese)
[7]Henry P,Krainin M,Herbst E,et al.RGB-D map-ping:using depth cameras for dense3D modeling of in-
door environments[C]//Proceedings of the12th Inter-
national Symposium on ExperimentalRobotics.Delhi,India,2010,20:22-25.
[8]Harris C,Stephens M J.A combined corner and edge detector[C]//Proceedings of the Fourth Alvey Vision
Conference.Manchester,UK,1988:147-151.
[9]Lowe D G.Object recognition from local scale-invariant features[C]//International Conference on Computer Vi-
sion.Kerkyra,Corfu,Greece,1999:1150-1157.[10]Bay H,Tuytelaars T,Van Gool L.SURF:speeded up robust features[C]//Proceedings of the European Con-
ference on Computer Vision.Graz,Austria,2006:
404-417.
[11]Lowe D G.Distinctive image features from scale-in-variant keypoint[J].International Journal of Computer
Vision,2004,60(2):9-110.
[12]Fischler M A,BollesRC.Random sample consensus:
a paradigm for model fitting with applications to image
analysis and automated cartography[J].Communica-
tion of the ACM,1981,24(6):381-395.
[13]Horn B K P.Closed-form solution of absolute orienta-tion using unit quaternions[J].Journal of the Optical
Society of America,1987,4(4):629-642.
[14]Segal A V,Haehnel D,Thrun S.Generalized-ICP[C/ OL]//Proceedings ofRobotics:Science and Systems.
Seattle,USA,2009.http://www.robots.ox.ac.uk/
avsegal/resources/papers/Generalized_ICP.pdf.
781
增刊(I)杨鸿,等:基于Kinect传感器的移动机器人室内环境三维地图创建
工业机器人的传感器 一.工业机器人的感觉系统 工业机器人的传感器主要分为:1.工业机器人的感觉系统2 .工业机器人内部传感器3 .工业机器人外部传感器4 .工业机器人传感器应用 其中工业机器人的感觉系统的基本组成为:视觉、听觉、触觉、嗅觉、味觉、平衡感觉和其他,而工业机器人传感器按用途可分为内部传感器和外部传感器。其中内部传感器装在操作机上,包括位移、速度、加速度传感器,是为了检测机器人操作机内部状态,在伺服控制系统中作为反馈信号。外部传感器,如视觉、触觉、力觉距离等传感器,是为了检测作业对象及环境与机器人的联系。工业机器人传感器的一般要求有精度高、重复性好,稳定性和可靠性好,抗干扰能力强,质量轻、体积小、安装方便。其特定要求有适应加工任务要求,满足机器人控制的要求,满足安全性要求以及其它辅助工作的要求。 二.工业机器人内部传感器在工业机器人内部传感器中,位置传感器和速度传感器,是当今机器人反馈控制中不可缺少的元件。现已有多种传感器大量生产,但倾斜角传感器、方位角传感器及振动传感器等用作机器人内部传感器的时间不长,其性能尚需进一步改进。内部传感器功能分类有:
1)规定位置、规定角度的检测 检测预先规定的位置或角度,可以用开/关两个状态值,用于检测机器人的起始原点、越限位置或确定位置。 微型开关:规定的位移或力作用到微型开关的可动部分(称为执行器)时,开关的电气触点断开或接通。限位开关通常装在盒里,以防外力的作用和水、油、尘埃的侵蚀。 光电开关:光电开关是由LED光源和光敏二极管或光敏晶体管等光敏元件组成,相隔一定距离而构成的透光式开关。当光由基准位置的遮光片通过光源和光敏元件的缝隙时,光射不到光敏元件上,而起到开关的作用 2)位置、角度测量 测量机器人关节线位移和角位移的传感器是机器人位置反馈控制中必不可少的元件。 a)电位器 b)旋转变压器 c)编码器 3)速度、角速度测量 速度、角速度测量是驱动器反馈控制必不可少的环节。有时也利用测位移传感器测量速度及检测单位采样时间位移量,但这种方法有其局限性:低速时测量不稳定的危险;高速时,只能获得较低的测量精度。 最通用的速度、角速度传感器是测速发电机或成为转速表的
移动机器人的关键技术分为以下三种: (1)导航技术 导航技术是移动机器人的一项核心技术之一[3,4]"它是指移动机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动"目前,移动机器人主要的导航方式包括:磁导航,惯性导航,视觉导航等"其中,视觉导航15一7]通过摄像头对障碍物和路标信息拍摄,获取图像信息,然后对图像信息进行探测和识别实现导航"它具有信号探测范围广,获取信息完整等优点,是移动机器人导航的一个主要发展方向,而基于非结构化环境视觉导航是移动机器人导航的研究重点。 (2)多传感器信息融合技术多传感器信息融合技术是移动机器人的关键技术之一,其研究始于20世纪80年代18,9]"信息融合是指将多个传感器所提供的环境信息进行集成处理,形成对外部环境的统一表示"它融合了信息的互补性,信息的冗余性,信息的实时性和信息的低成本性"因而能比较完整地,精确地反映环境特征,从而做出正确的判断和决策,保证了机器人系统快速性,准确性和稳定性"目前移动机器人的多传感器融合技术的研究方法主要有:加权平均法,卡尔曼滤波,贝叶斯估计,D-S证据理论推理,产生规则,模糊逻辑,人工神经网络等"例如文献[10]介绍了名为Xavier的机器人,在机器人上装有多种传感器,如激光探测器!声纳、车轮编码器和彩色摄像机等,该机器人具有很高的自主导航能力。 (3)机器人控制器作为机器人的核心部分,机器人控制器是影响机器人性能的关键部分之一"目前,国内外机器人小车的控制系统的核心处理器,己经由MCS-51、80C196等8位、16位微控制器为主,逐渐演变为DSP、高性能32位微控制器为核心构成"由于模块化系统具有良好的前景,开发具有开放式结构的模块化、标准化机器人控制器也成为当前机器人控制器的一个研究热点"近几年,日本!美国和欧洲一些国家都在开发具有开放式结构的机器人控制器,如日本安川公司基于PC开发的具有开放式结构!网络功能的机器人控制器"我国863计划智能机器人主题也已对这方面的研究立项 视觉导航技术分类 机器人视觉被认为是机器人重要的感觉能力,机器人视觉系统正如人的眼睛一样,是机器人感知局部环境的重要“器官”,同时依此感知的环境信息实现对机器人的导航。机器人视觉信息主要指二维彩色CCD摄像机信息,在有些系统中还包括三维激光雷达采集的信息。视觉信息能否正确、实时地处理直接关系到机器人行驶速度、路径跟踪以及对障碍物的避碰,对系统的实时性和鲁棒性具有决定性的作用。视觉信息处理技术是移动机器人研究中最为关键的技术之一。
机器人上用的传感器的介绍 作者:Ricky 文章来源:https://www.doczj.com/doc/c218846235.html,更新时间:2006年05月20日打印此文浏览数:18549 感知系统是机器人能够实现自主化的必须部分。这一章,将介绍一下移动机器人中所采用的传感器以及如何从传感器系统中采集所需要的信号。 根据传感器的作用分,一般传感器分为: 内部传感器(体内传感器):主要测量机器人内部系统,比如温度,电机速度,电机载荷,电池电压等。 外部传感器(外界传感器):主要测量外界环境,比如距离测量,声音,光线。 根据传感器的运行方式,可以分为: 被动式传感器:传感器本身不发出能量,比如CCD,CMOS摄像头传感器,靠捕获外界光线来获得信息。 主动式传感器:传感器会发出探测信号。比如超声波,红外,激光。但是此类传感器的反射信号会受到很多物质的影响,从而影响准确的信号获得。同时,信号还狠容易受到干扰,比如相邻两个机器人都发出超声波,这些信号就会产生干扰。 传感器一般有以下几个指标: 动态范围:是指传感器能检测的范围。比如电流传感器能够测量1mA-20A的电流,那么这个传感器的测量范围就是10log(20/0.001)=43dB. 如果传感器的输入超出了传感器的测量范围,那么传感器就不会显示正确的测量值了。比如超声波传感器对近距离的物体无法测量。 分辨率:分辨率是指传感器能测量的最小差异。比如电流传感器,它的分辨率可能是5mA,也就是说小于5mA的电流差异,它没法检测出。当然越高分辨率的传感器价格就越贵。 线性度:这是一个非常重要的指标来衡量传感器输入和输出的关系。 频率:是指传感器的采样速度。比如一个超声波传感器的采样速度为20HZ,也就是说每秒钟能扫描20次。 下面介绍一下常用的传感器: 编码器:主要用于测量电机的旋转角度和速度。任何用电机的地方,都可以用编码器来作为传感器来获得电机的输出。
A Matlab-based Simulator for Autonomous Mobile Robots Abstract Matlab is a powerful software development tool and can dramatically reduce the programming workload during the period of algorithm development and theory research. Unfortunately, most of commercial robot simulators do not support Matlab. This paper presents a Matlab-based simulator for algorithm development of 2D indoor robot navigation. It provides a simple user interface for constructing robot models and indoor environment models, including visual observations for the algorithms to be tested. Experimental results are presented to show the feasibility and performance of the proposed simulator. Keywords: Mobile robot, Navigation, Simulator, Matlab 1. Introduction Navigation is the essential ability that a mobile robot. During the development of new navigation algorithms, it is necessary to test them in simulated robots and environments before the testing on real robots and the real world. This is because (i) the prices of robots are expansive; (ii) the untested algorithm may damage the robot during the experiment; (iii) difficulties on the construction and alternation of system models under noise background; (iv) the transient state is difficult to track precisely; and (v) the measurements to the external beacons are hidden during the experiment, but this information is often helpful for debugging and updating the algorithms. The software simulator could be a good solution for these problems. A good simulator could provide many different environments to help the researchers to find out problems in their algorithms in different kinds of mobile robots. In order to solve the problems listed above, this simulator is supposed to be able to monitor system states closely. It also should have flexible and friendly users’ interface to develop all kinds of algorithms. Up to now, many commercial simulators with good performance have been developed. For instance, MOBOTSIM is a 2D simulator for windows, which provides a graphic interface to build environments [1]. But it only supports limited robot models (differential driven robots with distance sensors only), and is unable to deal with on visual based algorithms. Bugworks is a very simple simulator providing drag-and-place interface [2]; but it provides very primitive functions and is more like a demonstration rather than a simulator. Some other robot simulators, such as Ropsim [3], ThreeDimSim [5], and RPG Kinematix [6], are not specially designed for the development of autonomous navigation algorithms of mobile robots and have very limited functions. Among all the commercial simulators, Webot from Cyberbotics [4] and MRS from Microsoft are powerful and better performed simulators for mobile robot navigation. Both simulators, i.e. Webots and MRS, provide powerful interfaces to build mobile robots and environments, excellent 3-D display, accurate performance simulation, and programming languages for robot control. Perhaps due to the powerful functions, they are difficult to use for a new user. For instance, it is quite a boring job to build an environment for visual utilities, which involves shapes building, materials selection, and illumination design. Moreover, some robot development kits have built-in simulator for some special kinds of robots. Aria from Activmedia has a 2-D indoor simulator for Pioneer mobile robots [8]. The simulator adopts feasible text files to configure the environment, but only support limited robot models. However, the majority of commercial simulators are not currently supporting On the other hand, Matlab
移动机器人控制系统的发展方向 摘要随着计算机技术、传感器技术的不断发展,对于机器人领域的发展具有一定的促进作用。而由于移动机器人具有能够自治与移动的特征,在机器人领域处于核心地位。在复杂、危险的环境中,移动机器人所发挥的作用是有目共睹的。对此,对当前国内外较为常见的移动机器人控制系统进行剖析,并在此基础上论述了该领域的未来发展方向。 【关键词】移动机器人控制系统发展方向 移动机器人属于能够自动执行工作任务的机器,不但能够按照事先编译的程序运行,同时人类还可对其指挥。当前主要被运用在生产业、建筑业以及航空航天领域,而该领域的发展情况直接关系到国家综合实力的提升速度,对此加强对移动机器人控制系统的发展情况,以及未来发展方向的研究势在必行。 1 国内外常见的移动机器人控制系统 相对于国内在移动机器人的研究状况,能够看出国外在该领域的研究是较早的,其中具有代表性的有Saphira、TeamBots以及ISR。而在国内方面,代表性的有OSMOR、ZJMR以及Agent。下面,便对较为常用的控制系统进行介绍:
1.1.1 Saphira控制系统 Saphira控制系统是移动机器人领域中最早的系统,是有SRI国际人工智能中心在1990年所研发的,此系统是基于本地感知空间的共享内存与黑板,来实现协调与通信进程。由于Saphira是采用C语言来进行开发的,同时支持Windows 与Unix系统,因此具有文档资料相对完整、系统资源占用少等特征。但是需注意的是,由于Saphira系统在定位方面无法达到当前的实际需求,因此运用是相对较少的。 1.1.2 TeamBots控制系统 本系统是基于Java包与Java应用程序而构建的,经过20余年的发展后,此系统截止到目前已经被运用到多种类型的机器人平台当中。除此之外,在适用的操作系统方面,其中具有代表性的有Windows、MacOS以及Linux等,因此其运用的范围是更加广泛的。 1.1.3 ISR控制系统 ISR是基于行为的控制模式,其中是有任务执行层、反映层以及推理层所构成的,是有CAS研究中心所研发的。其中,任务执行层的作用是执行推理层所传输的指令;反映层其中包含资源、控制器以及行为;推理层的功能是根据用户的指令来对决策进行制定。此外,ISR控制系统仅能够在Linux中进行操作,并且没有公开化使用。
传感器在工业机器人中的应用 工业机器人的准确操作取决于对其自身状态、操作对象及作业环境的限确队识。这种准 确认识沟通过传感器的感觉功能实现。 机器人自身状态信息酌获取项过其内部信息传感25(位置、速度、加速度等)获取并为机 器人控制反馈信息。希迪电子操作刘象钟L部环境的队识通道外部传感器得到。 一、零位和极限位互的检测 答你的检测精度皇接影响—[业机器人的重复定位精度和轨迹精度,极限位置的检洲则起 保护机器人和安全动作曲作用。 工业机器人常川的位置传感器有接触式微动开关、精密电位计或非接触式光电外关、电讽 流传感器。通常在机器人的每个共计上各安装种接触式传感器或非接触式传感器及与其对 /匝的死挡块。在接近极限位置g1.传感器先产土限位停止信号,如果限位停止信号发出之后还 未停J:,则油死挡块强制停[L。肖无法确定机器人某关节的学位时.司“出位移传感器的输出信 号确定。利用微动开关、光电开关、电涡流等传感器确定零位的特点是零位的固定性。当传感器 位置调好后,此关哨的零位就确定丁,若要改变,则必须重新调整传感器的价黄。而用电位11或位移仕感器确定零位时.不需要至斯调理其位置.只要在LI宾机软件中修改车位参数他即可。 =、位移量的检测 位移传感器一股都安装在机器人各关节上,用于检测机器人各关节的位移量,提供机器人
的位置控制信息。选用时府考虑到女装传感器结构的*IJ行件以及传感器本身的精度、分辨率 及灵敏度等。机器人上常用的位移传感器打旋转变比2E、起动变压器、感应同步器、电位汁、光 栅、磁枷、光电编码器辞。 关啊型机器人大多采用光电编码器,Au采用光电增量码盘。经过处理后酌佰号是勺关节 转角角度成一定关系式的脉冲数.计算机在确定零位和正、负方向后.只要计脉冲数就可以得 到关节转角酌角位移值。如果将七安装在关节的木端转驯L:川lJ可以形成该关节的闭环控制。 理论—懒可以获得较高的控制精度。但这样对传感甜的分辨率要求高。 在机器人中使用速度传感器是为实现机器人番关节的速度闭环控制。在用应流、交流伺 服电动机作为工业机器人驱动元件时.钽电容一般采用测速发电机作为速度酌检测器。它勺电动机 同轴,电动机转速不同时,输出的电压位也不问、将其电压侦输入到速度控训罚环反馈回路中, 以提高机器人的动态性能。 加直度传感器被用于机器人中关节的加速度控制。钉时为了抑制振动而在关节上进行检 测,将测到的振动频率、幅值和相位输入计算机。然后在控制环节中叠An一个勺此频率相向、 幅值相等而相位相反的控制信号用于抑制振动。 四、外部信息传感器在电弧焊机器人中的应用 闭门—2为其应用之一。在垂直于坡u楷面的上方安装一窄缝光发射器.在抖L方用视
基于行为设计的自主式小型机器鼠系统研究 学生:谢群指导老师:周伦 单位:机械工程学院机械工程与自动化2003级 摘要 移动机器人是近年来发展起来的一门综合学科,集中了机械、电子、计算机、自动控制以及人工智能等多学科最新研究成果,代表了机电一体化的最高成就。移动机器人在工业生产中常用来完成运输和上下料等任务,同时也被广泛用于农业、医疗等不同行业。 在移动机器人相关技术研究中,路径规划技术是一个重要研究领域[17]。本文首先初步讨论总结了目前主要的路径规划技术。从基于事例、基于环境模型和基于行为三个方面全面而系统地综述了移动机器人路径规划技术的研究现状,对于目前普遍采用的路径规划方法及其实际应用情况进行了较为详细介绍和分析。 基于行为的方法是由MIT的Brooks在他著名的包容式结构[42]中建立,它是一门从生物系统得到启发,而产生的用来设计自主机器人的技术,也是本文所重点研究的目标。它采用类似动物进化的自底向上的原理体系,尝试从简单的智能体来建立一个复杂的系统。将其用于解决移动机器人路径规划问题是一种新的发展趋势,它把导航问题分解为许多相对独立的行为单元,比如跟踪、避碰、目标制导等。这些行为单元是一些由传感器和执行器组成的完整的运动控制单元,具有相应的导航功能,各行为单元所采用的行为方式各不相同,这些单元通过相互协调工作来完成导航任务。 基于行为的机器人学反对抽象的定义, 因此采用具体化的解释更适合该领域的哲学思想。基于行为的机器人学的重要研究内容是系统结构而不是算法, 基于行为设计的机器人在非结构化动态环境中的性能非常优越,用基于符号的机器人学设计的类似机器人无法达到如下性能: a.高速度,高灵活性。在动态复杂环境中的移动速度很快; b.高鲁棒性。可以承受局部损坏; c.高效性。软件代码可以是传统的几百分之一,硬件可以是传统的几十分之一; d.经济性。价格是传统的十几分之一; e.可扩展性。很少改变原有系统便可增加性能; f.可靠性。分布式自组织并行工作,可靠性强。 为进一步研究基于行为的规划方法,而引入一个真实环境及任务模型,即IEEE每年举办的微型机器鼠比赛,通过设计基于行为的机器鼠模型论证该算法的可行性。此项比赛要求机器人能
传感器在工业机器人中应用 工业机器人是面向工业领域的多关节机械手或多自由度的机器人。工业机器人是自动执行工作的机器装置,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据人工智能技术制定的原则纲领行动。 在工业自动化领域,机器需要传感器提供必要的信息,以正确执行相关的操作。机器人已经开始应用大量的传感器以提高适应能力。绝大多数智能机器人的外部传感器,可以大致分为触觉传感器,接近传感器、力学传感器,以及视觉、滑觉、热觉等多种类型的传感器。例如有很多的协作机器人集成了力矩传感器和摄像机,以确保在操作中拥有更好的视角,同时保证工作区域的安全等。 用于避障的传感器 避障可以说是各种机器人最基本的功能,不然机器人一走动就碰到花花草草就不好了。机器人并不一定要通过视觉感知自己前方是否有障碍物,它们也可以通过触觉或像蝙蝠那样通过声波感知。因此,检测机器人前方是否存在障碍物的传感器,可以分为接触式和非接触式的。 最典型的接触式测障传感器便是碰撞开关(图1)。碰撞开关的工作原理非常简单,完全依靠内部的机械结构来完成电路的导通和中断。 图1 碰撞开关 在机器人上的用法多数是将探测臂加长,扩大探测范围和灵敏度。当机器人撞到前面的障碍物,碰撞开关的信号端便可返回一个高电平,控制芯片由此可以知道小车面前存在着障碍物。 非接触式测障开关一般的工作原理与声纳和雷达相似,发射声波或某种射线,遇到
障碍物,声波或射线被反射回来,并被传感器接收,这时传感器就认为发现了障碍物。我们最常用的便是发射和接收红外线的传感器(图3,图4)。 图3 红外发射管 图4 红外接收管 红外测障传感器成本较低(当然比碰撞开关还是要高一点),电路简单,检测范围大。如果在电路中加上一个电位器,就可以随时调节传感器的检测范围。这种检测方式为非接触式,控制起来更加方便、灵活。但这种测障方式也有缺点,多个红外传感器之间容易互相干扰,因此在传感器的布局上需要多花心思,安装位置也要尽可能地避免红外信号的碰撞。 用于测距的传感器 机器人光知道哪个方向有障碍物并不够,还必须知道障碍物距离自己具体有多远,才好判断下一步的行动。这时我们就需要测距传感器。 测距传感器大多为非接触式的,目前在个人机器人制作领域用得比较多的是红外和超声波测距传感器两种。 提到红外测距传感器,就不能不提夏普的GP2D12红外测距传感器(图5)。GP2D12几乎可以说是机器人爱好者的必备传感器,在我们平时常看到的一些个人机器人作品中,绝大多数都可以看到它的身影。
机器人最实用的10种传感器盘点 随着智能化的程度提高,机器人传感器应用越来越多。智能机器人主要有交互机器人、传感机器人和自主机器人3种。从拟人功能出发,视觉、力觉、触觉最为重要,早已进入实用阶段,听觉也有较大进展,其它还有嗅觉、味觉、滑觉等,对应有多种传感器,所以机器人传感产业也形成了生产和科研力量。 内传感器 机器介机电一体化的产品,内传感器和电机、轴等机械部件或机械结构如手臂(Arm)、手腕(Wrist)等安装在一起,完成位置、速度、力度的测量,实现伺服控制。 位置(位移)传感器 直线移动传感器有电位计式传感器和可调变压器两种。角位移传感器有电位计式、可调变压器(旋转变压器)及光电编码器三种,其中光电编码器有增量式编码器和绝对式编码器。增量式编码器一般用于零位不确定的位置伺服控制,绝对式编码器能够得到对应于编码器初始锁定位置的驱动轴瞬时角度值,当设备受到压力时,只要读出每个关节编码器的读数,就能够对伺服控制的给定值进行调整,以防止机器人启动时产生过剧烈的运动。 速度和加速度传感器 速度传感器有测量平移和旋转运动速度两种,但大多数情况下,只限于测量旋转速度。利用位移的导数,特别是光电方法让光照射旋转圆盘,检测出旋转频率和脉冲数目,以求出旋转角度,及利用圆盘制成有缝隙,通过二个光电二极管辨别出角速度,即转速,这就是光电脉冲式转速传感器。此外还有测速发电机用于测速等。 应变仪即伸缩测量仪,也是一种应力传感器,用于加速度测量。加速度传感器用于测量工业机器人的动态控制信号。一般有由速度测量进行推演、已知质量物体加速度所产生动力,即应用应变仪测量此力进行推演,还有就是下面所说的方法: 与被测加速度有关的力可由一个已知质量产生。这种力可以为电磁力或电动力,最终简化为对电流的测量,这就是伺服返回传感器,实际又能有多种振动式加速度传感器。
? 197 ? ELECTRONICS WORLD?技术交流 移动机器人控制系统设计 广东工业大学 侯晓磊 随着移动机器人在人们社会生活中的地位不断提高,设计一种 可靠、稳定的机器人控制系统越发的变得重要起来,以NI公司的MyRIO控制器以其安全可靠、编程开发简单而脱颖而出。本文基于上述控制器、L298N电机驱动芯片Labview设计一种移动机器人控制软硬件系统系统,经验证,该系统运行稳定、可靠、高效。 1.前言 新一轮科技革命引发新一轮产业革命。“互联网+制造”构建工业4.0,智能制造成为我国由制造大国向制造强国转变的关键一步,移动机器人作为智能制造中的一个组成部分,作用越发的变得举足轻重。本文给出一种以MyRIO+L298N+Labivew的移动机器人控制系统。 2.IN MyRIO控制器 NI myRIO是NI最新设计的嵌入式系统设计平台。NI myRIO中内含双核ARM Cortex-A9,实时性高,并且还可以便捷定制FPGA I/ O,给开发设计人员提供更好的设计复杂系统的平台。 NI myRIO作为可重配置控制器具有以下重要特点: 易于上手使用:引导性安装和启动界面可使开发人员更快地熟悉操作,协助开发人员快速了解工程概念,完成设计任务。编程设计简单,利用实时应用、内置WiFi等功能,开发人员可以实现远程部署应用,“无线”操控。 板载资源众多:有丰富的数字I/O接口,提供SPI串行外设接口、PWM脉宽调制输出端口、正交编码器输入端口、UART异步收发器端口和I2C总线接口、多个单端模拟输入、差分模拟输入和带参考的模拟输入等可供选择的资源。 另外,NI MyRIO还提供可靠性能较好的控制器保护电路,防止由于意外操作造成控制器不可恢复性损坏,总之,NI MyRIO为开发人员提供了一个编程简易,设计电路方便,不用刻意担心意外操作而影响控制器使用的平台。 3.L298N电机控制芯片 L298N是一种用来驱动电机的集成电路,可以较稳定的输出平稳电流和较强的功率。工作均电流为2A,最高可达4A,最高输出电压为50V,能够带动带有感性元件的负载。控制器可以直接通过输入输出口与电机驱动芯片联接,从而方便控制驱动芯片的输出。如将芯片驱动直流电机时,可以直接与步进电机相联接,通过调节控制器输出实现步进电机的的正反转功能当控制直流电机时,可以通过调节控制芯片的电压信号的极性,PWM波的占空比,从而实现直流电机转速和转向的调节。4.系统硬件部分设计 系统采用MyRIO整体框架,外围增设电机驱动电路、避障驱动电路、里程计电路、液晶显示电路、陀螺仪电路。通过MyRIO主控制发送控制信号驱动移动机器人运动,实时通过外围传感器获取位置信息反馈给主控制 器,然后控制器通过闭环系统调节当前位置以保证对目标位置的追踪。 图1 5.系统软件部分设计 系统软件部分采用经典控制理论的闭环控制系统,将电机、主控制器和外设传感器构成闭环系统,通过调节闭环统的参数,来使 移动机器人以较小偏差追踪按照预定轨迹。 图2 6.结束语 本文介绍了基于NI MyRIO控制器设计移动机器人控制系统,通过仿真和实物测试,能较好的完成对任务的追踪踪。 参考:From Student to Engineer:Preparing Future Innova-tors With the NI LabVIEW RIO Architecture https://www.doczj.com/doc/c218846235.html,.2014-04-01;王曙光,袁立行,赵勇.机器人原理与设计.人民邮电出版社,2013 。
超声波传感器在移动机器人的应用(探测障碍物) 摘要:移动机器人通过各种传感器系统感知外界环境和自身状态,在复杂的环境自主移动并完成相应的任务,超声波传感器以其独有的特征而被青睐, 关键词:超声波传感机器人障碍物探测 前言: 随着机器人技术的发展,自主移动机器人以其灵活性和智能性等特点,在人们的生产生活中应用越来越广泛,移动机器人要获得自主行为,其最重要的任务之一是获取关于环境的知识。这是用不同的传感器测量并从那些测量中提取有意义的信息而实现的。视觉、红外、激光、超声波等传感器都在移动机器人中得到实际应用。超声波是一种在弹性介质中的机械振荡,有两种形式:横向振荡(横波)及纵和振荡(纵波)。在工业中应用主要采用纵向振荡。超声波可以在气体、液体及固体中传播,其传播速度不同。另外,它也有折射和反射现象,并且在传播过程中有衰减。在空气中传播超声波,其频率较低,一般为几十KHZ,而在固体、液体中则频率可用得较高。在空气中衰减较快,而在液体及固体中传播,衰减较小,传播较远。利用超声波的特性,可做成各种超声传感器,配上不同的电路,制成各种超声测量仪器及装置,并在通迅,医疗家电等各方面得到广泛应用。超声波传感器以其性价比高、硬件实现简单,成本低,不易受电磁、光线被测对象颜色烟雾影响等优点,在移动机器人感知系统中得到了广泛的应用。但是超声波传感器也存在一定的局限性,主要是因为波束角大、方向性差、测距的不稳定性(在非垂直的反射下)等,因此往往采用多个超声波传感器或采用其他传感器来补偿。 超声波传感器在移动机器人的应用 由于用超声波测量距离并不是一个点测量。超声波传感器具有一定的扩散特性,发射的超声能量主要集中在主波瓣上,沿着主波轴两侧呈波浪型衰减,左右约30°的扩散角,但对于移动机器人很难保证其自身运动姿态的稳定性,采用超声波传感器固定在移动机器人车身的探测方式,当移动机器人偏离平行墙面时,探测系统往往很难得到实际的距离。另外,超声波这种发散特性在应用于测量障碍物的时候,只能提供目标障碍物的距离信息,而不能提供目标的方向和边界信息。这些缺陷都大大限制了超声波传感器的实际应用和推广。 在移动机器人行走过程中,由于随时可能遇到障碍物,而且障碍物的大小、多少未知,所以能够顺利地到达目的地,本设计系统使用了两个超声波传感器进行检测现场的环境信息,使它们的信息能够相互补充。在超声波感应器检测过程中,若有一个检测到一个障碍物,另一个检测到另一个障碍物,做如下处理:如果两传感器同时检测到障碍物,那么认为是同一个物体;相反,如果两传感器不同时检测到障碍物时,那么认为是两个物体。显然,探测系统在角度上是离散的,存在一定的分辨力,很可能把两个相近的物体看成同一个物体,但这两种情况并不影响移动机器人的行走,因为当两种物体相近时,移动机器人不可能从它们的间隙中走过,因此,把它们看成是同一物体是合理的,至少可以减少计算的复杂性。 障碍物的信息包括:超声波传感器中心到障碍物的最短距离和障碍物相对于车体的方位,移动机器人运行过程中,实时采集每个方向上超声波传感器中心到障碍物边界距离,进行比较划分找到其中最短的距离及方位最为车体到障碍物的最短距离及方位。避障算法如下:移动机器人以某一速度前进,如果某一传感器检测的距离小于d,这个距离是预定义可编程的临界距离,那么机器人以某一
移动机器人的自主导航控制 一、研究的背景 移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多功能于一体的综合系统。它集中了传感器技术、计算机技术、机械工程、电子工程、自动化控制工程以及人工智能等多学科的研究成果,是目前科学技术发展最活跃的领域之一。随着机器人性能不断地完善,移动机器人的应用范围大为扩展,不仅在工业、农业、国防、医疗、服务等行业中得到广泛的应用,而且在排雷、搜捕、救援、辐射和空间领域等有害与危险场合都得到很好的应用。因此,移动机器人技术已经得到世界各国的普遍关注。 在自主式移动机器人相关技术的研究中,导航技术是其研究核心,同时也是移动机器人实现智能化及完全自主的关键技术。导航是指移动机器人通过传感器感知环境信息和自身状态,实现在有障碍的环境中面向目标的自主运动。导航主要解决以下三方面的问题:(l)通过移动机器人的传感器系统获取环境信息;(2)用一定的算法对所获信息进行处理并构建环境地图;(3)根据地图实现移动机器人的路径规划及运动控制。 二、相关技术 移动机器人定位是指确定机器人在工作环境中相对于全局坐标的位置,是移动机器人导航的基本环节。定位方法根据机器人工作环境的复杂性、配备传感器种类和数量等方面的不同而采用多种方法。主要方法有惯性定位、标记定位、GPS定位、基于地图的定位等,它们都不同程度地适用于各种不同的环境,括室内和室外环境,结构化环境与非结构化环境。 惯性定位是在移动机器人的车轮上装有光电编码器,通过对车轮转动的记录来粗略地确定移动机器人位置。该方法虽然简单,但是由于车轮与地面存在打滑现象,生的累积误差随路径的增加而增大,导致定位误差的逐渐累积,从而引起更大的差。 标记定位法是在移动机器人工作的环境里人为地设置一些坐标已知的标记,超声波发射器、激光反射板等,通过机器人的传感器系统对标记的探测来确定机器人在全局地图中的位置坐标。三角测量法是标记定位中常用的方法,机器人在同一点探测到三个陆标,并通过三角几何运算,由此可确定机器人在工作环境中的坐标。标记定位是移动机器人定位中普遍采用的方法,其可获得较高的定位精度且计量小,但是在实际应用中需要对环境作一些改造,添加相应的标记,不太符合真正意义的自主导航。 GPS定位是利用环绕地球的24颗卫星,准确计算使用者所在位置的庞大卫星网 定位系统。GPS定位技术应用已经非常广泛,除了最初的军事领域外,在民用方面也得到了广泛的应用,但是因为在移动导航中,移动GPS接收机定位精度受到卫 星信号状况和道路环境的影响,同时还受到时钟误差、传播误差、接收机噪声
第25卷第2期 系统工程与电子技术 Systems Engineering and E lectronics V ol 125,N o 122003 收稿日期:2001-12-04 修订日期:2002-04-15 作者简介:杨福广(1974-),男,硕士研究生,工程师,主要研究方向为机器人控制。 文章编号:10012506X (2003)022******* 全方位轮式移动机器人控制器设计与实现 杨福广1,周风余1,侯宏光2 (1.山东科技大学机器人研究中心,山东济南250031;2.海军潜艇学院,山东青岛266071) 摘 要:全面介绍了一种全方位移动机器人的控制系统体系结构及软件的控制策略,包括采用的超声和激光传感器系统、网络化无线通讯系统、基于上下位机的计算机控制系统等方面。重点介绍了基于LM628的系统的伺服控制方法,并给出了机器人运动实验的结果,证明了系统的可行性。该系统适合在非结构化动态环境中进行分布式多Agnet (智能体)、多机器人的协作与协调、移动机器人路径规划与避碰等研究。 关键词:移动机器人;控制器;传感器中图分类号:TP24 文献标识码:A Design and R ealization of the Controller for the Mobile R obot With Full Mobility Y ANG Fu 2guang 1,ZH OU Feng 2yu 1,H OU H ong 2guang 2 (1.Shandong University o f Science &Technology ,Jinan 250031,China ; 2.Navy Submarine Academy ,Qingdao 266071,China ) Abstract :T he system con figuration of hardware and control strategy for rob ot with full m obility is introduced.T he sens or system including ultras onic and laser ,wireless communication system using netw ork and the control system based on master 2slave com puter are presented.T he serv o control meth od that based on LM628is introduced and the result which proves the feasibility is given.T his system is adapted to study distributed muti 2agent ,the cooperation and harm ony of muti 2rob ot ,path plan and obstacle av oidance of m obile rob ot in n one con figuration dynamic circumstance. K eyw ords :M obile rob ot ;C ontroller ;Sens or 1 引 言 近年来随着人工智能技术、计算机技术等相关技术的发展,对智能机器人的研究越来越多。轮式移动机器人 (W MR )可以作为各种智能控制方法(包括动态避障、群体协 作策略)的良好载体,同时又可以方便地构成网络化的分布式系统,开展多智能体的调度、规划等研究,所以对它的研究越来越受到重视。 本文全面介绍了一种全方位移动机器人的控制系统体系结构,包括传感器、通讯、伺服控制系统等,并给出了实验结果,证明了系统的可行性。 2 移动机器人的计算机控制系统的硬件 结构及工作原理 由于机器人不断移动的需要,系统采用充电电池供电。机器人硬件平台由两台工业PC 机、一块由LM628构成的伺服板、三个PW M 放大器和直流伺服电机组成。其结构框图如图1所示。系统可以分成以下四个模块:监控模块、感知 模块、路径规化和逆运动学计算模块、执行模块。 (1)监控模块 该模块的功能通过监控计算机来实现,在Win98下用 Visual C ++6.0开发,主要功能包括: ①任务描述 利用操作者规定的语言,描述对机器人的控制任务。 ②监控指令输入 在机器人完成任务的过程当中,操作者根据任务的执行情况以及环境的状况,对系统进行适当的干预,以充分发挥人的智能,构成人-机合作系统。如遇到不可避开的障碍、或者多个机器人运动过程中发生死锁等意外情况,都需要操作者适时的干预。 ③文本和图形的显示界面 以文本或者图形的方式实时地显示机器人系统的工作信息,包括当前正在执行的任务,机器人的位置、速度、障碍物等环境信息。 监控计算机是通过无线网络与每一个移动机器人取得联系的。 (2)感知模块 传感器作为机器人的感知部分,是机器人具有自主能力的重要前提条件。在W MR 系统中,共有三种传感器:超声、
自主移动机器人智能导航研究进展 冯建农 柳 明 吴 捷 (华南理工大学计算机系 广州 510641)摘 要 本文对当前在自主移动机器人智能导航研究中已被采用并取得成果的研究方法进行了 综述,并根据已取得的成果预测了移动机器人智能导航研究的发展趋势,指出视觉导航和传感器融合将是移动机器人智能导航的主要发展方向. 关键词 移动机器人,智能系统,导航 1 引言 国际机器人研究在经过了80年代的低潮之后,呈现出复苏和继续发展的形势;我国的机器人研究在国家“七五”、“八五”及“863”计划的推动下也取得了很大进展.与70年代的机器人浪潮相比,现在的机器人研究有两个特点:一是对机器人智能的定位有了更加符合实际的标准,也就是不要求机器人具有象人类一样的高智能,而只是要求机器人在某种程度上具有自主处理问题的能力;另一个特点是许多新技术及控制方法(神经网络、传感器融合、虚拟现实、高速度的并行处理机等)被引入到机器人研究中.研究重点的转变使机器人研究走向了健康而平稳的发展道路,并不断取得新的研究成果. 智能自主移动机器人能够按照存储在其内部的地图信息,或根据外部环境所提供的一些引导信号(即通过对环境的实时探测所获得的信息)规划出一条路径,并能够沿着该路径在没有人工干预的情况下,移动到预定目标点.智能自主移动机器人对它的研究正在成为一个重要的研究热点. 由于机器人应用从制造业向非制造业的扩展,以及自主移动智能机器人在诸如野外作业、深海探测、以及一些人类本身所不能进入的有毒或高温环境的作业中,有着极其广泛的应用前景,因此近年来机器人研究在多方面都已取得了很大的进展.研究的成果必将成为各行各业提高生产力的强有力工具. 2 移动机器人导航分类 移动机器人有多种导航方式,根据环境信息的完整程度、导航指示信号类型、导航地域等因素的不同,可以分为基于地图导航、基于陆标导航、基于视觉导航、基于感知器导航等. 基于地图的导航是在机器人内部存有关于环境的完整信息,并在预先规划出的一条全局路线的基础上,采用路径跟踪和避障技术,实现机器人导航;当机器人对周围环境并不完全了解时,则可采用基于陆标的导航策略,也就是将环境中具有明显特征的景物存储在机器人内部,机器人通过对陆标的探测来确定自己的位置,并将全局路线分解成陆标与陆标之间的片段,再通过一连串的陆标探测和陆标制导来完成导航任务;在环境信息完全未知的情况下,可1997年11月机器人 R OBOT N ov.,1997 1996-11-04收稿