收稿日期:2009-01-21
作者简介:陈沛然(1982-),男,四川德阳人,硕士研究生,主要研究工作是应用于图像处理方面的嵌入式硬件.
?电路与控制?
基于DM642的嵌入式可见光图像识别系统硬件设计与实现
陈沛然,张晓霞,王祥斌,王仕超,周 勇,冷 洁
(电子科技大学光电学院,四川 成都 610054)
摘 要:基于TMS320DM642,采用ADV7171&ADV7181视频编解码芯片,设计了嵌入式可见光图像识别系统.着重研究并对比分析了视频编解码芯片的选型,拓展了类似的视频系统的视频编解码芯片的选型范围,简要分析了系统构架,并详细分析了各功能模块,研究了在实际设计与实现中遇到的问题并给出了相应解决方案,给出了主要模块的原理图.最后介绍了系统的功能扩展及应用前景.
关键词:DM642;ADV7181;ADV7171;图像识别;可见光
中图分类号:T N911.72 文献标识码:A 文章编号:1673-1255(2009)02-0067-04
H are Design and Implementation of Embedded Visible 2Light
Video Image Identif ication System B ased on DM 642
CHEN Pei 2ran ,ZHAN G Xiao 2xia ,WAN G Xiang 2bin ,WAN G Shi 2chao ,ZHOU Y ong ,L EN G Jie
(School of Optoelect ronic Inf orm ation ,U niversity of Elect ronic Science and Technology of China ,Chendu 610054,China )
Abstract :The embedded visible 2light video image identification system is designed using ADV7181&ADV7171for digital video encoder/decoder based on TMS320DM642.The selected version of digi 2tal video encoder/decoder is emphatically analyzed in the comparative method ,to expand the choice range of the digital video encoder/decoder of similar video systems.The architecture of this system and its function modules are analyzed.The problems occurred in the practice design and implementation process are studied and some solu 2tions are given ,and the schematic diagrams for the main parts are also given https://www.doczj.com/doc/cc17889680.html,stly ,it points out the possi 2ble improvements and the application foreground of the system.
K ey w ords :DM642;ADV7181;ADV7171;video information identification ;visible light 嵌入式图像识别系统具有可靠性高、成本低、体积小、使用方便等优点,有着广泛的应用前景.目前市面上的嵌入式图像识别系统大多采用了TI 公司的一款多媒体专用芯片TMS320DM642,并较多地参考了TI 公司为TMS320DM642推出的评估板,而本文结合自己的实际需求另外给出了一套嵌入式图像识别系统的硬件方案,并取得了不错的效果.
TMS320DM642是TI 公司2003年推出的面向
视频图像处理的高性能定点DSP 芯片,具有极强的单核处理能力以及高度的灵活性和可编程性,其主
频最高可达600MHz ,对应指令执行速度可达4800M IPS [1].其重要特点如下:它拥有3个可独立配置的视频端口,可独立配置为视频采集或显示端口,均支持多种采集/显示方案和视频标准,可以实现与一般视频编/解码芯片的无缝连接,并且视频信号可以采用EDMA 方式快捷地在存储器与视频端口之间传输[2].
1系统的总体构架
整个系统在硬件上分6个功能模块:图像采集
第24卷第2期2009年4月 光电技术应用
EL ECTRO -OPTIC TECHNOLO GY APPL ICA TION
Vol.24,No.2April.2009
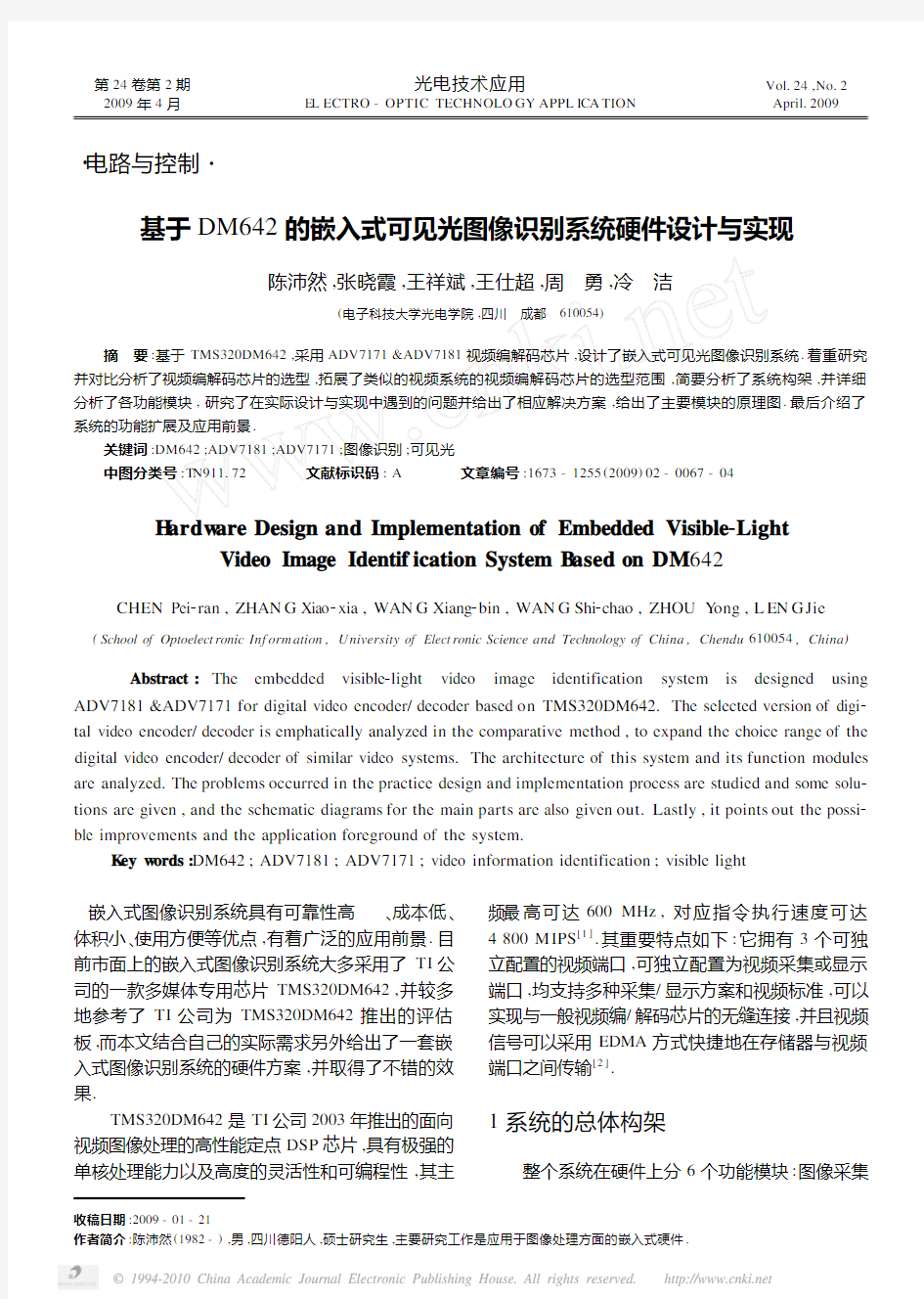
模块、目标识别模块、视频输出模块、存储模块、电源模块和串口调试模块;模拟视频信号经ADV7181
解码后被送到DM642中进行图像识别算法处理,然后经过ADV7171芯片编码输出到机载显示器上,实现已识别视频图像输出.DM642的EM IF 口连接UAR T 芯片TL16C752B ,其输出可接PC 的串口,便于调试.从DM642上连接出来的HPI 接口,可用于将来与其他板子的连接以扩展功能
.
图1 系统总体构架
2 TMS320DM642的外围电路设计
2.1 视频采集通道设计及视频解码芯片的选型
由于受到TI 为DM642推出的评估板的影响,目前基于DM642的图像处理系统有相当数量照搬了其方案而选用了TVP5150或者SAA7115,这里将给出一种视频解码芯片选用ADV7181的方案,希望能丰富基于DM642的视频解码芯片选型.
下面将对这3种视频解码芯片进行比较分析从价格上来看,ADV7181和SAA7115较为接近,而TVP5150大概是以上2种视频解码芯片价格的三分之一倍,具有很高的性价比.从封装上来看,TVP5150是做得最小的.另外它还具有连线简单,
操作简单,功耗极低的优点[3],其缺点是输出数据的格式单一,输入口太少,由于只包含了一个ADC ,分时复用也只支持2路CVBS 输入,分辨率只有8位.以上这些特点使TVP5150更适合应用于PDA 、手机、MP4等体积小,对功耗成本要求都很敏感的场合,而不适合在较为追求视频解码芯片性能,对将来的扩展性要求较高,同时又对封装大小、功耗不是很敏感的场合.总体来说TVP5150更适合应用于便
携式的小型电子产品.
ADV7181和SAA7115的分辨率都可以达到16
位,都可以支持6通道模拟输入,SAA7115有2个ADC [4],而ADV7181包含了3个.同时ADV7181的最高采样频率为54MHz 是SAA7115的最高采样频率27MHz 的一倍,而更高的采样频率将给采样的准确性和数字滤波带来益处[5],而系统的模拟输入一般采用PAL 制式,其带宽为6MHz ,54MHz 相对27MHz 具有更高的过采样率,在不使用抗混叠滤波器的情况下,ADV7181输出信号的频谱抗混叠性更好.同时虽然ADV7181的最高的采样频率为54MHz ,但经过其内部的DPP 滤波器的抽取,其输出的数据速率同样是27MHz ,这样虽然与SAA7115的输出的数据速率相同,但是由于是通过54MHz 采样频率抽取得到的,其孔径抖动较SAA7115的更小,而更小的孔径抖动使ADV7181输出的数字信号具有更好的信噪比.
ADV7181、SAA7115性能优于TVP5150,一般应用在对视频解码芯片性能要求更高的场合,但在实际问题中除了性能往往还需要结合有无需要的特色功能、封装大小、功耗、成本等综合考虑,最后做出一种折中的选择.例如SAA7115本身的功耗很大,如果要应用在对功耗有严格要求的便携式电子产品中就不行,那么只有牺牲一些图像质量来满足对功耗的要求而选择TVP5150.由于系统是针对机载搜救系统的,对图像质量要求很高,而对封装大小、功耗要求不高,ADV7181、SAA7115都基本满足要求.但综合前文对两者的分析,ADV7181性能更优,由于两者价格相近,故ADV7181具有更高的性价比.综上,系统的视频解码芯片选择了ADV7181.
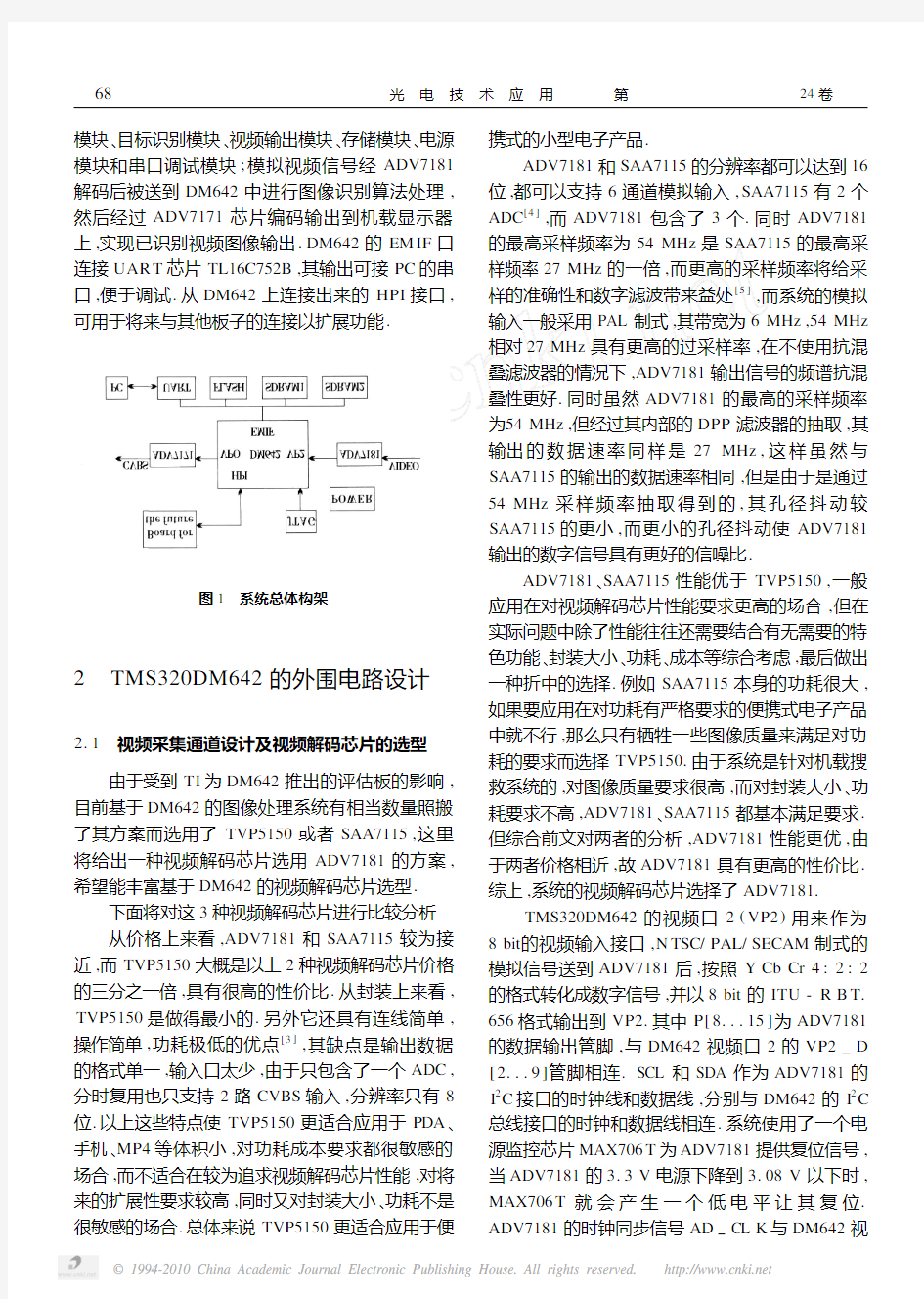
TMS320DM642的视频口2(VP2)用来作为8bit 的视频输入接口,N TSC/PAL/SECAM 制式的模拟信号送到ADV7181后,按照Y Cb Cr 4:2:2的格式转化成数字信号,并以8bit 的ITU -R B T.656格式输出到VP2.其中P[8...15]为ADV7181的数据输出管脚,与DM642视频口2的VP2D [2...9]管脚相连.SCL 和SDA 作为ADV7181的I 2C 接口的时钟线和数据线,分别与DM642的I 2C
总线接口的时钟和数据线相连.系统使用了一个电
源监控芯片MAX706T 为ADV7181提供复位信号,当ADV7181的3.3V 电源下降到3.08V 以下时,MAX706T 就会产生一个低电平让其复位.ADV7181的时钟同步信号AD
CL K 与DM642视
86
光 电 技 术 应 用 第24卷
频口2的VP2CL K0相连,其场同步(FIELD )、垂直同步(VS )、水平同步(HS )、载波频率锁定(SFL )信号线按图2所示分别和DM642视频口2的4根控制线连接.
2.2 视频输出通道设计及视频编码芯片的选型
目前市面上的视频编解码芯片主要有Philips 公司的SAA71xx 系列、ADI 的ADV71xx 系列、TI 公司的TVP51xx 系列、Microns 公司的VPX322x 系列等,TI 针对DM642的视频应用出的评估板选用了Philips 公司的SAA7105这款视频编码芯片,同时本来Philips 的视频编解码芯片SAA71xx 在国内外就应用较广,所以目前基于DM642的视频处理系统绝大多数采用SAA7105作为视频编码芯片,这样可以参考TI 评估板的电路图和初始化程序,这些都无疑可以给开发带来便利并缩短开发时间.但正如上文提到的,和选择视频解码芯片一样,选择视频编码芯片也需要综合考虑很多因素,特别是考虑到ADV7171价格只有SAA7105的一半,而总体
性能又不逊色于SAA7105,所以在这里系统选择了ADV7171作为视频编码芯片.希望在针对DM642
的视频编码芯片选型中多提供一种选择.
TMS320DM642的视频口0(VP0)用来作为视频的输出接口.ADV7171可以将数字视频信号(ITU -R B T.656)编码成普通电视所能接收的N TSC 或PAL 制式的复合电视信号(CVBS )[6].如图2所示,ITU -R B T.656标准的Y Cb Cr 4:2:2格式数据从DM642的VP0的数据管脚(VP0D [2...9])输出,送到ADV7171的P [0..7]管脚上,经过数模转换成模拟视频信号,并从ADV7171的DAC A 管脚输出.其复位信号和ADV7181一样,
也由电源监控芯MAX706T 提供.ADV7171的I 2C 接口的时钟线和数据线与DM642的I 2C 总线接口的时钟线和数据线相连,其时钟同步信号(DA CL K )、场同步(FIELD )、垂直同步(VS )、水平同步(HS )分别和DM642视频口0的控制线连接,具体如图2所示
.
图2 ADV7181、ADV7171与DM642原理图
2.3 电源模块设计
DM642需要高精度、稳定的双电源供电,系统
采用了1个5V 电源驱动,2个MOSFET 的开关电
源(TPS54310)分别供给DSP 核心电压CVDD (1.4V )和外围电压DVDD (3.3V ).DM642对于电源要求比较高,DVDD 为3.3V ±160mV ,CVDD
为1.4V ±40mV [7],而TI 公司的TPS54310的输
出精度是1%[8],在TI 的评估板上负载测量,其纹波小于20mV ,完全满足DM642正常工作的要求.系统还采用了MAX706T 和TPS3823DBV -33两款电源监控芯片分别用于对视频编解码芯片的3.3V 和整个系统的3.3V 的监测.
系统还采用了电压转换芯片TPS767D318M
9
6第2期 陈沛然等:基于DM642的嵌入式可见光图像识别系统硬件设计与实现
为ADV7181提供模拟1.8V、数字1.8V、3.3V,为了避免模拟1.8V和数字1.8V之间的影响,在输出时用磁珠将二者隔开.选用了一款LDO-LM1086为ADV7171提供3.3V电源.尽量使用不同的电压转换芯片对不同的芯片供电,即使同样是3.3V也不共用电压转换芯片,这样可以避免芯片之间通过电源相互影响.
2.4 串口模块设计
在嵌入式设计中,UAR T通常用来与PC进行通信,它是不带同步不带调制的一种全双工串行传送方式,通常转换成RS232或RS485电平传送,而几乎所有的电脑都支持它.为了实现DM642和PC 机的实时通信,系统也采用了这种方式.用得较多的UAR T芯片有TL16C550等,为了获得更好的实时性,系统选用了具有更高数据传输速率的TL16C752B,其速率可达到 3.125Mbps[9]. TL16C752B有2套可独立工作的UAR T系统,这里只用到了1套,由于PC端串口采用RS232电平标准,因此TL16C752B需要连接MAX3243以完成电平转换.TL16C752B的数据发送引脚和数据接收引脚分别与MAX3243的数据输入引脚和数据输出引脚连接.通过扩展串口来完成DM642与PC机的串行通信接口比较简单、数据传送距离远、使用经济,能够较好地完成调试、实时显示等功能.
2.5 存储模块设计
(1)FLASH
作为一个成熟的硬件系统,为了实现系统的自启动,一般都会配备FLASH.系统采用8Mbit的SST39VF800A映射到DM642的CE1地址空间,用来存储程序.DM642的CE1空间被配置成16bit 宽,因为其8Mbit是按512K×16bit来寻址的[10],所以需要19根地址线来寻址512K的地址空间.而DM642的EM IF口可用地址线有20条,故可以满足其所需地址线数目,如果采用更大容量的FLASH,在20根地址线都不够的情况下,就只有通过DM642的GPIO口线来模拟不足的地址线.由于FLASH属于低速器件,且在软件系统运行过程中FLASH相对于SDRAM读写操作要少得多,故对其布线可以不做过多考虑.
(2)SDRAM
由于在整个图像处理过程中需要RAM来缓存大量的图像数据,同时当程序直接烧入DM642的时候,如果内部RAM不够,也需要外接RAM扩展存储空间.而DM642芯片内部只集成了256K的SRAM,显然不能满足需求,需要在外部存储器接口(EM IF)上扩展存储空间.DM642的EM IF在CE0空间提供了容量为1G,宽度为64bit的SDRAM接口总线,为了符合64bit的接口,需要采用2片32bit的SDRAM.系统选用了型号为M T48LC8M32B2的2片32bit的SDRAM芯片在片外扩展了32Mbyte的动态存储空间.在正常工作频率下,通过仿真发现其PCB走线上的信号传输时间大于其上升时间1/10,于是需要考虑高速数字电路两大问题:反射和延迟[11].反射造成SDRAM时钟线信号出现振铃,多次穿越门限造成误触发.数据线和时钟线的传输延迟不相同,造成时钟上升沿采样不到所需要的数据.解决的方法是:串联33Ω的电阻做阻抗匹配,以降低传输线上的信号反射干扰,布线时控制数据线和时钟线的长度差在一定范围内,且走线尽可能的短.同时2片SDRAM的布线拓扑最好采用T型分支结构,且走线的分支点应靠近DM642,这样可以降低传输线上的信号反射.
3 系统的扩展和应用前景
研究的基于DM642的嵌入式可见光图像识别系统具有成本低、体积小、可扩展性好、稳定性高等优点,光学图像经过视频解码芯片转化为数字信号,在DM642内经过图像识别算法的高速处理,实现对预定目标的识别跟踪,识别后的数字信号再被视频编码芯片转化为模拟信号在机载显示器上输出.
由于开发时间限制,系统首先考虑的是实现基本的功能,下一步将在系统的基础上进行扩展.例如DM642还有一个视频口VP1没有用,同时由于每一个VP口的数据是16位宽的,所以采用8bit的ITU-R B T.656格式最多就可以扩展到4路视频采集,从而可以增大视角范围.另外还考虑增加本地硬盘接口,用于本地大容量存储.
参考文献
[1] Texas Instruments.TMS320C6000系列DSP的CPU与
外设[M].卞红雨.北京:清华大学出版社,2007:55-
56.
(下转第79页)
07 光 电 技 术 应 用 第24卷
熵来说明背景是否丰富.
表4 彩色融合结果之间的比较
R
G
B
融合结果1 5.2177.82747.0229融合结果2 5.3029.71427.3187融合结果3 2.2438.5219 6.5273融合结果4
1.176
7.7336
4.1508
表4中的R 、G 、B 列的数据分别表示R 、G 、B 三通道的平均目标背景对比度、粗糙度、熵.综合对比度、粗糙度和熵考虑,融合结果2的各个分量都比其他3个大,效果较理想.比较剩下的3个融合结果,融合结果1的目标较为明显,背景也较丰富.融合结果3的细节信息较多,融合结果4最差.
4 结 束 语
对彩色融合图像从主观和客观两方面进行评
价.主观评价主要从目标、细节、背景色彩等方面评
价,客观评价利用平均目标背景对比度、粗糙度、熵等参量进行评价.主观评价的人为因素较多,主要从
人的视觉舒适度和目标识别等方面考虑.客观评价能够客观地说明目标识别和细节信息的情况,但是背景色彩无法体现.客观评价中的YIQ 变换法较好.要想很好地评价一幅彩色融合图像质量的好坏,应该把主观评价和客观评价相结合,方能得到理想的效果.参考文献
[1] 石俊生,金伟其,王岭雪.视觉评价夜视彩色融合图像
质量的试验研究[J ].红外与毫米波学报,2005,24(3):
236-240.
[2] 邵桂芳,李祖枢,成卫,等.基于视觉感知的融合图像质
量评价[J ].计算机应用,2004,24(5):69-75.
[3] 荆绍威,杨风暴,李申燕.基于增强处理和HSV 变换的
多源图像彩色融合及评价[J ].光电技术应用,2008,23
(4):57-61.
[4] 杨风暴.多波段红外图像目标特征分析与融合方法研
究[M ].北京:北京理工大学,2006:46-51.
[5] 石俊生,金伟其.彩色夜视融合图像熵评价研究[J ].兵
工学报,2006,27(6):1039-1042.
(上接第70页)
[2] 付强,王春平,姚志刚.基于TMS320DM642的电视跟
踪系统设计[J ].军械工程学院学报,2005,17(5):68-71.
[3] Texas https://www.doczj.com/doc/cc17889680.html,P5150Low 2Power Video Decoder
With Scaling[S],2002:5-6.
[4] Philips.SAA7115Datasheet [S],2001:23-25.[5] Analog Devices.Multiformat
SDTV Video Decoder
ADV7181B[S],2004:1-1.
[6] Analog Devices.Digital PAL/N TSC Video Encoder with
102Bit
SSAF TM and Advanced
Power Management ADV7170/ADV7171[S],2004:1-1.[7] Texas
Instruments.
TMS320DM642
Video/Imaging
Fixed 2Point Digital Signal Processor[R ].Revised August ,2005:70-71.
[8] Texas Instruments.TPS54310Datasheet [R ],2002:1-1.
[9] Texas Instruments.TL16C752B 3.3-V DUAL UART
WITH 64-B YTE FIFO[R ],2003:2-2.[10] SST.SST39VF800A Datasheet [R ],2001:1-1.[11] 周润景,袁伟亭.Cadence 高速电路板设计与仿真
[M ],北京:电子工业出版社,2006:456-457.
本 刊 声 明
本刊已成为《中国核心期刊(遴选)数据库》收录期刊;《中文科技期刊数据库》收录期刊;《中国期刊全文数据库》全文收录期刊;《中国学术期刊综合评价数据库》统计源期刊;《电子科技文摘》数据库收录源之数据期刊.本期刊所刊载的文章在国内外数据库检索机构(包括纸版、光盘版、网络版)报道时,不再征求作者意见.文稿刊登录用后作者著作权使用费与本刊稿酬一次性付给,并赠送当期样刊一份.
9
7第2期 荆绍威等:多源图像彩色融合效果评价研究
一、嵌入式计算机系统体系结构 体系主要组成包括: 1. 硬件层 硬件层中包含嵌入式微处理器、存储器(SDRAM 、ROM 、Flash 等)、通用设备接口和I/O 接口(A/D 、D/A 、I/O 等)。在一片嵌入式处理器基础上添加电源电路、时钟电路和存储器电路,就构成了一个嵌入式核心控制模块。其中操作系统和应用程序都可以固化在ROM 中。 软件层功能层
2. 中间层 硬件层与软件层之间为中间层,也称为硬件抽象层(Hardware Abstract Layer,HAL)或板级支持包(Board Support Package,BSP),它将系统上层软件与底层硬件分离开来,使系统的底层驱动程序与硬件无关,上层软件开发人员无需关心底层硬件的具体情况,根据BSP 层提供的接口即可进行开发。该层一般包含相关底层硬件的初始化、数据的输入/输出操作和硬件设备的配置功能。 3. 系统软件层 系统软件层由实时多任务操作系统(Real-time Operation System,RTOS)、文件系统、图形用户接口(Graphic User Interface,GUI)、网络系统及通用组件模块组成。RTOS是嵌入式应用软件的基础和开发平台。 4. 功能层 功能层主要由实现某种或某几项任务而被开发运行于操作系统上的程序组成。 一个嵌入式系统装置一般都由嵌入式计算机系统和执行装置组成,而嵌入式计算机系统是整个嵌入式系统的核心,由硬件层、中间层、系统软件层和应用软件层组成。执行装置也称为被控对象,它可以接受嵌入式计算机系统发出的控制命令,执行所规定的操作或任务。 硬件的设计 本网关硬件环境以单片机S3C2440芯片和DM9000以太网控制芯片为主,
嵌入式硬件工程师与软件工程师的区 别 嵌入式硬件工程师与软件工程师都有哪些不同呢?具体工作都包括什么?就业前景如何?工资待遇如何?这些都是大家十分关心的问题,尤其是对于即将走向工作岗位的学生来说,这些问题直接影响到他们的择业及将来的发展方向。 下面从几个方面来解答这些问题。 什么是嵌入式硬件工程师? 随着嵌入式技术的普及,硬件工程师的性质也有所改变。嵌入式硬件工程师与我们平常所说的硬件工程师不同。嵌入式硬件工程不但要求具备硬件工程师的基本技能,还必须完成部分软件工程师的工作,例如:底层驱动的开发嵌入式操作系统的裁剪,移植;GUI、文件系统等软件的移植;基于嵌入式操作系统的底层驱动程序的设计等。 什么是嵌入式软件工程师? 嵌入式软件工程师与我们平常说的软件工程师不同。 我们平常说的软件工程师大部分指的是windows和linux操作系统下应用软件的开发人员,硬件平台是基于PC机的。而嵌入式软件工程师则是指在wince、linux等嵌入式操作系统下进行用户应用软件开发的人员,硬件平台则是基于嵌入式产品的(例如:手机、PDA等)。软件开发工具也有所区别,嵌入式软件开发一般使用的是嵌入式系统专用的开发工具,例如wince下的evc,和linux下的qt等。 嵌入式软、硬件工程师职能、工作性质的区别 嵌入式硬件工程师的主要工作包括: 方案设计 根据客户需要进行可行性分析、整体功能设计、硬件成本预算等,在完成功能的同时还必须考虑到产品的生产加工、后期维修等各方面问题。 元件的选型 选择元件时必须根据每个元件特性和电路板特性,成分考虑到性能,干扰,功耗等问题。
电路的设计 元件的位置,产品的功耗,各部分功能完整性,抗干扰等 电路板设计 要求设计出的电路板,安全可靠,美观,拆装方便。 系统集成及调试 产品样品的组装集成及硬件调试。 底层驱动程序设计 根据硬件资源进行驱动程序的设计。 操作系统的裁剪移植* 根据需要选择最优的操作系统进行裁剪和移植 GUI及文件系统等软件移植* 根据需要加入GUI及文件系统等软件。 注:*表示该工作有可能不需要。 嵌入式软件工程师的主要工作包括: 人机交互程序设计 图形用户界面(GUI)程序设计 用户应用软件设计 软件系统测试 举个简单的例子: 就拿手机的设计来说,硬件工程师需要根据要求完成以下工作: 1、根据用户的需求例如:直板还是翻盖的,尺寸多大,功能要求(MP3,GPRS,触摸屏等),成本要求等。对整个方案进行设计。 2、选择最优的元件,例如液晶屏、CPU等 3、进行电路的设计 4、集成和调试 5、底层驱动程序设计 6、移植wince、linux或者symbian等嵌入式操作系统 软件工程师需要完成以下工作
引言 嵌入式系统是以应用为中心,软件硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗等综合性严格要求的专用计算机系统。本文主要研究了基于SEP3202(内嵌ARM7TDMI 处理器内核)的嵌入式最小系统,围绕其设计出相应的存储器、总线扩展槽、电源电路、复位电路、JTAG、UART等一系列电路模块。 嵌入式最小系统 根据IEEE的定义,嵌入式系统是:控制、监视或者辅助装置、机器和设备运行的装置。这主要是从应用上加以定义的,从中可以看出嵌入式系统是软件和硬件的综合体,还可以涵盖机械等附属装置。不过上述定义并不能充分体现出嵌入式系统的精髓,目前国内一个普遍被认同的定义是:以应用为中心、以计算机技术为基础、软件硬件可裁剪、适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。 嵌入式最小系统即是在尽可能减少上层应用的情况下,能够使系统运行的最小化模块配置。以ARM内核嵌入式微处理器为中心,具有完全相配接的Flash电路、SDRAM电路、JTAG电路、电源电路、晶振电路、复位信号电路和系统总线扩展等,保证嵌入式微处理器正常运行的系统,可称为嵌入式最小系统。对于一个典型的嵌入式最小系统,以ARM处理器为例,其构成模块及其各部分功能如图1所示,其中ARM微处理器、FLASH和SDRAM模块是嵌入式最小系统的核心部分。 ?微处理器——采用了SEP3203; ?电源模块——为SEP3203内核电路提供2.5V的工作电压,为部分外围芯片提供3.3V的工作电压; ?时钟模块(晶振)——通常经ARM内部锁相环进行相应的倍频,以提供系统各模块运行所需的时钟频率输入。32.768kHz给RTC和Reset模块,产生计数时钟,10MHz作为主时钟源; ?Flash存储模块——存放嵌入式操作系统、用户应用程序或者其他在系统掉电后需要保存的用户数据等; ?SDRAM模块——为系统运行提供动态存储空间,是系统代码运行的主要区域; ?JTAG模块——对芯片内部所有部件进行访问,通过该接口对系统进行调试、编程等,实现对程序代码的下载和调试; ?UART模块——用于系统与其他应用系统的短距离双向串行通信; ?复位模块——实现对系统的复位;
如何成为linux嵌入式工程师 1、Linux开发工程师(每天学习6小时,用一个月时间) 首先成长为一名Linux开发工程师,这是最基本的目标,他应该具 备如下的素质: (1)了解Linux基本概念和基本操作(历史,文化,起源)(命令行,配置,操作,开发模式) (2)会使用Linux平台下的编辑器vi(默认安装,占内存小,方便 向嵌入式移植) (3)会使用Linux平台下的编译器GCC(相应的十几个命令行参 数) (4)会使用Linux平台下的管理工具Make(与Makefile相配合,尤其用于大项目中多平台移植的情况下) (5)会使用Linux平台下的调试器GDB(可以了解底层硬件,及 汇编指令) 2、嵌入式工程师 他更关心的是将来在哪一目标机上运行,不关心操作系统,进行的 更多与编程相关的工作
(1)合格的C程序的程序员(理解基本的控制结构:循环、分支、 数组、指针) (2)基本的编程思想(编程实践中总结算法) (3)程序的编译和链接 (4)可执行文件内部(段、起始地址、如何加载执行) (5)目标机处理器体系结构 (6)知道处理器的外设即System on Chip(内部存储结构及外设 驱动) (7)汇编语言及指令(主要是用在加载过程中) 3、系统工程师 系统工程师夹在驱动工程师及应用工程师这两个层次之间,他要对系统有一个整体的概念,系统主要是指操作系统,往往理论有余而实践 不足 (1)进程管理与调度(知道进程间的切换与调度,多任务)(2)内存管理(建立MMU页表,知道从虚地址到物理地址的映射)(3)驱动管理(管理设备,编写设备驱动,加载设备驱动)
(4)文件系统(制作文件系统,文件系统的读写,甚至驱动有时也 被当成文件系统来管理) (5)网络协议知识(协议实现作为上层应用与底层驱动之间的 衔接) (6)图形系统知识(支持多窗口及管理窗口,包括窗口切换,窗口 移动和覆盖) 4、嵌入式Linux系统工程师 (1)嵌入式Linux基本概念 (2)交叉编译 (3)Linux内核开发和调试工具 (4)启动代码移植(修改Uboot,Vivi等) (5)内核交叉编译(Linux不支持芯片时要芯片级的移植,支持芯 片时要板级的移植) (6)根文件系统制作 (7)设备驱动程序开发
(19)中华人民共和国国家知识产权局 (12)实用新型专利 (10)授权公告号 (45)授权公告日 (21)申请号 201920536637.0 (22)申请日 2019.04.18 (73)专利权人 哈尔滨新光光电科技股份有限公 司 地址 150000 黑龙江省哈尔滨市开发区迎 宾路集中区南湖街1号 (72)发明人 杨克君 叶明 陈楠 翟宇 (74)专利代理机构 哈尔滨龙科专利代理有限公 司 23206 代理人 高媛 (51)Int.Cl. G02B 13/14(2006.01) G02B 13/00(2006.01) (ESM)同样的发明创造已同日申请发明专利 (54)实用新型名称 一种可见光与长波红外的共口径复合成像 光学系统 (57)摘要 本实用新型提供了一种可见光与长波红外 的共口径复合成像光学系统,包括:沿光路依次 设置的整流罩、红外复合镜组以及棱镜组;红外 复合镜组中靠近整流罩一侧的红外透镜的中心 具有开孔;棱镜组设置在开孔处,用于将从开孔 处进入的可见光引导至红外复合镜组外。本实用 新型成像视场大、探测距离远、占用空间小、具有 大相对孔径,可用于小型红外导引头中,可实现 对目标的搜索、 跟踪。权利要求书1页 说明书3页 附图17页CN 209690606 U 2019.11.26 C N 209690606 U
权 利 要 求 书1/1页CN 209690606 U 1.一种可见光与长波红外的共口径复合成像光学系统,其特征在于,包括: 沿光路依次设置的整流罩(1)、红外复合镜组(2)以及棱镜组(3); 所述红外复合镜组(2)中靠近整流罩(1)一侧的红外透镜的中心具有开孔; 所述棱镜组(3)设置在所述开孔处,用于将从开孔处进入的可见光引导至所述红外复合镜组(2)外。 2.根据权利要求1所述的可见光与长波红外的共口径复合成像光学系统,其特征在于,还包括可见光反射镜(4)以及可见光成像镜组(5),所述可见光反射镜(4)用于将引导出的可见光反射至可见光成像镜组(5),进而通过可见光成像镜组(5)进行成像。 3.根据权利要求2所述的可见光与长波红外的共口径复合成像光学系统,其特征在于,所述红外复合镜组(2)包括第一红外透镜、第二红外透镜、第三红外透镜,分别沿着靠近整流罩至远离整流罩方向依次设置;所述第一红外透镜的中心具有开孔。 4.根据权利要求3所述的可见光与长波红外的共口径复合成像光学系统,其特征在于,由红外复合镜组(2)构成的红外光分系统的工作波段为8μm~14μm,视场≥6.5°× 5.2°;由棱镜组(3)、可见光反射镜(4)以及可见光成像镜组(5)构成的可见光分系统的工作波段为580nm~1000nm,视场≥8°×8°。 2
声光调制型可见光高光谱成像技术研究 基于布拉格调制的声光可调谐滤波器(Acousto-optic tunable filter,AOTF)是一种超声波与光波可以在各向异性介质中发生声光相互作用的新型分光元件,因其既可以被看作是分光元件又可以被看作是偏振元件,而且其具有大孔径角、衍射效率高、调谐速度快等突出优点,以至于这种滤波器被广泛应用于高光谱成像技术中。目前,国外对基于声光可调谐滤波器的高光谱成像技术的相关研究较为成熟,而国内对该研究起步较晚,基本上都处于基础理论和探索性实验阶段,虽然已经有实际应用,但其诸如光谱分辨率、衍射效率等关键性能与国外相比较仍有一定差距,还可以进一步提升,所以仍需要大量深入的理论与实验研究。鉴于此,本文以布拉格调制的声光可调谐滤波技术为基础,开展了相关的理论分析和实验研究工作,旨在将声光可调谐滤波技术完美应用于高光谱成像领域中,进而对我 国高光谱成像技术的发展起到积极的促进作用。在理论上,从TeO2 单晶的光学性质和声学性质出发,首先推导了参量互作用基本方程,并以此为依 据得到了声光调制下的耦合波方程的一般形式。 接着根据耦合波方程和动量匹配条件推导出了两种偏振方向相互垂直的入 射光的基本调谐模式,并给出了选取合适入射角和超声切变波的入射方向的依据。最后针对实验需求计算出了两个声光可调谐滤波器的其它性能指标。在此过程中,解决了介质外+1级衍射光与0级透射光的分离、由色差引起的衍射光漂移以及 降低射频驱动功率等关键问题。分析了锥形光束对声光可调谐滤波器内部分离角、外部分离角、光谱带宽以及衍射效率等性能参数的影响,以此为依据给设计前置光学系统提出了严格的要求。 在实验中利用宽带光源对设计的非共线声光可调谐滤波器的入射光波长与 超声驱动频率、入射光极角与超声驱动频率等基本调谐关系以及衍射光光谱带宽、衍射效率、空间分辨率和介质外衍射光漂移量等性能进行了详细的测量,并根据测量结果对设计的声光可调谐滤波器参数进行优化,直到满足高光谱成像要求。基于设计的声光可调谐滤波器搭建了高光谱成像实验系统,首先利用宽带光源研究了波长调谐范围内色差对衍射光漂移量的影响,并给出了图像漂移量与入射光波长的函数关系式,为设计后置光学接收系统提供了可靠依据。接着在 419.48865.07 nm的光谱范围、100200 m的探测距离内
用一个宏定义FIND求一个结构体CTYPE里某个变量CNUM相对了CTYPE的编移量。 如:stuct student { int a; char b[20]; double ccc; } 则: FIND(student,a); //等于0 FIND(student,b);//等于4 二楼的可以。 #define FIND(type,member) (int)(&( ((type*)0)->member) ) struct student { int a; char b[20]; double ccc; }; int main(int argc,char* argv[]) { int i=FIND(student,a); //等于0 i=FIND(student,b);//等于4 return 0; } 调试结果是对的。 题目出得很好: 其实就是考下这个宏offsetof ,定义在文件stddef.h 中. #define offsetof(TYPE, MEMBER) ((size_t) &((TYPE *)0)->MEMBER) TYPE是某struct的类型0是一个假想TYPE类型struct,MEMBER是该struct中的一个成员. 由于该struct的基地址为0, MEMBER的地址就是该成员相对与struct头地址的偏移量. 再往深处,接触过Linux Kernel的会知道这个宏container_of,就嵌套了宏offsetof ,其在Linux Kernel中的应用非常广泛,它用于获得某结构中某成员的入口地址. 1.运放求放大倍数的 2.三极管基础知识(放大区,截至区,饱和区) 3.并联RC变换成串联RC 4.运放求反馈的 5.单片机和74hc595硬件连接和编程 6。数据结构-----队列,建立一个队列,写数,读数。 一简答题
近年来嵌入式硬件的发展 施明 摘要:近年来随着移动处理、嵌入式应用的大量涌现,以及通用微处理器工艺水平和主频的不断提升,双核乃至四核的出现,功耗日益成为设计者必须关心的问题。这就要求嵌入式软硬件提出了新的要求,需要不断的改进和创新。本文围绕嵌入式近年的发展与更新,主要翻阅了十几篇论文,直接参考文献12篇,其中外文资料4篇。根据所阅读的文献通过对比浅析嵌入式硬件近年来的发展状况。 关键词:8位微控制器,32位微控制器,DSP核MPU In recent years the development of embedded hardware Abstract: in recent years as mobile processing, embedded application, as well as the general microprocessor to improve the technological level and frequency, dual-core and even the emergence of four nuclear power has increasingly become the designers must concern. This requires an embedded hardware and software is put forward new requirements, need continuous improvement and innovation. Around embedded in recent years, the development and updating, this paper mainly through more than ten papers, direct 12 references, including 4 foreign data. According to the reading of literature by comparing the embedded hardware is analysed in recent years the development of the situation Key words:8-bit microcontroller.32- bit microcontroller. DSP core MPU 一、引言 20世纪90年代后期,正处后PC机的前夜.开始兴起了嵌入式的第二次浪潮。随着手机的铺天盖地,惊醒了国内的专家和广大的单片机技术人员,引发了一场单片机与嵌入武的议论。无论改论是否有一致的认识,议论总是有益的。如果能取得一致的认识当然就更好。嵌入式,即嵌入式计算机,是从功能上说的。嵌入式计算机强调的要点是:计算机不为表现自己,而为辅助它所在的宿主设备.智能化地,剃现设备的功能。单片机的叫法,一,未能体现它初始的控制使命,二,它不能代表嵌入式的总体.仅是嵌入式中的类。尽管单片机的结构展示着嵌入式的极终方向,正如今日人们追求的SoC。单片机是Intel 初期的命名,但随后不久就改口叫微控制器了,并把它列入嵌入式器件的一类之中。
笔面试题 1、技术类 (1)描述一下你的项目 (2)单片机I/O口需要注意的问题 驱动能力不强,高电平驱动时需要加上拉电阻; 电平匹配,上拉或分组。 51单片机的P0口常用作数据线和低8位地址线、P2常用作高8位地址线。 (3)单片机不能启动的原因 1)晶振没有振荡,测量晶振是否起振; 2)一直在复位状态,检查复位电路; 3)程序飞了,检查程序; 4)程序编制错误,检查程序; 5)单片机坏了,更换单片机芯片; 6)硬件电路错误。 (4)单片机最小系统 1)复位电路: 当引脚9出现2个机器周期以上高电平时,单片机复位,程序从头开始运行。
2)时钟电路:有振荡器电路产生频率等于晶振频率,这时用的是外界晶振。 也可以又外部单独输入,此时XTAL2脚接地,时钟信号由XTAL1输入。 3)电源电路:VCC和GND引脚。 4)程序下载电路。(并不严格包含) (5)哈弗结构和冯洛伊曼结构 哈佛结构:是一种将程序指令储存和数据储存分开的存储器结构。中央处理器首先到程序指令储存器中读取程序指令内容,解码后得到数据地址,再到相应的数据储存器中读取数据,并进行下一步的操作(通常是执行)。程序指令储存和数据储存分开,数据和指令的储存可以同时进行,可以使指令和数据有不同的数据宽度,与冯.诺曼结构处理器比较,哈佛结构处理器有两个明显的特点: 1、使用两个独立的存储器模块,分别存储指令和数据,每个存储模块都不允许指令和数据并存; 2、使用独立的两条总线,分别作为CPU与每个存储器之间的专用通信路径,而这两条总线之间毫无关联。 改进的哈佛结构,其结构特点为: 1、使用两个独立的存储器模块,分别存储指令和数据,每个存储模块都不允许指令和数据并存,以便实现并行处理; 2、具有一条独立的地址总线和一条独立的数据总线,利用公用地址总线访问两个存储模块(程序存储模块和数据存储模块),公用数据总线则被用来完成程序存储模块或数据存储模块与CPU之间的数据传输; 哈佛结构的微处理器通常具有较高的执行效率。其程序指令和数据指令分开组织和储存的,执行时可以预先读取下一条指令。目前使用哈佛结构的中央处理器和微控制器有很多,除了上面提到的Microchip公司的PIC系列芯片,还有摩托罗拉公司的MC68系列、Zilog公司的Z8系列、ATMEL公司的A VR系列和安谋公司的ARM9、ARM10和ARM11。 冯·诺伊曼结构:也称普林斯顿结构,是一种将程序指令存储器和数据存储器合并在一起的
第20卷 第4期 2012年4月 光学精密工程 Optics and Precision Engineering Vol.20 No.4 Ap r.2012 收稿日期:2011-02-16;修订日期:2011-04- 19. 基金项目: 总装装备预研基金资助项目(No.51301060207)文章编号 1004-924X(2012)04-0739- 06小型可见光双视场光学系统的研制 魏 群*,艾兴乔,贾宏光 (中国科学院长春光学精密机械与物理研究所,吉林长春130033) 摘要:基于光学设计基本理论,设计了一种体积小,跟踪范围可以达到整个前半球的可见光双视场光学系统。系统由前部集束系统,中间光路转折系统及后部成像系统3部分组成。集束系统采用望远镜式结构,用于改变光束的口径;光路转折系统采用库德光路, 由4片反射镜组成,用于转折光路及扫描;成像系统由长焦成像系统和短焦成像系统组成,分别形成两个视场的像,用于目标识别与跟踪。光学系统焦距分别为60mm和120mm,设计传递函数在58lp/mm处均大于0.5。加工装调后进行了成像试验验证,结果表明,该系统能够同时完成大视场及小视场的图像获取,在可视范围内成像质量满足系统总体要求。 关 键 词:双视场光学系统;可见光镜头;库德光路;光学设计 中图分类号:TH703 文献标识码:A doi:10.3788/OPE.20122004.0739 Development of small-scale and dual-field visible light optical sy stemWEI Qun* ,AI Xing-qiao,JIA Hong -guang(Changchun Institute of Optics,Fine Machanics and Phy sics,Chinese Academy of Sciences,Changchun130033,China)*Corresponding author,E-mail:wei.q@hotmail.comAbstract:On the basis of optical design theory,this paper designs a small-scale and dual-field opticalsystem with a half sphere tracking field.This optical system takes a Code optical path as the main sys-tem and consists of three parts:tele-system at front,ray tuning system in the middle,and imagingsystem in the back.The first part is a telescope compound for adjusting the diameter of the lightbeam;the middle part is Code optical path made up four mirrors,which is used to turn the direction ofthe light beam;and the last part is an imaging system for long focal and short focal imaging and fortracking and recognizing targets.The focal lengths of the system are 60mm and 120mm and theirModulation Transfer Functions(MTFs)are all above 0.5at 5.8lp/mm.By imaging tests,this opticalsystem has better imaging quality and can capture the images form the large field and small one at thesame time.Key words:dual-field optical system;visible light lens;Code system;optical design
嵌入式软件工程师 职位名称:嵌入式软件工程师性别:男 待遇: 6000-10000人数: 5 2011-1-24 人气: 2306时间: 2:52:01工作方式:全职 职位描述及要求: 1. 基于ARM平台编写linux底层驱动程序以及应用层程序的开发; 2. 本科及以上学历,计算机、自动化或相关专业,三年以上嵌入式系统软件开发经验优先; 3. 精通嵌入式linux C/C++语言程序开发,熟悉至少一种处理器架构及其汇编; 4. 掌握嵌入式驱动程序的开发及调试,熟悉板级调试及相关仪器使用; 5. 掌握嵌入式应用层程序的开发,熟悉QT编程者优先; 6. 有硬件设计能力者优先; 7. 具备良好的文档编写能力和习惯,能够编写规范的概要和详细设计文档; 8. 对程序设计有精益求精的态度,良好的团队合作精神和沟通能力。
熟悉TCP/IP,FTP, TFTP,TELNET, Radius等协议 职位描述: 1、熟悉ARM体系架构、熟悉相应外围接口电路 2、三年以上linux驱动开发经验; 3、有bootloader、嵌入式系统移植经验; 具有嵌入式下的 USB、Audio、LCD、Camera、Flash、bootloader ,电源管理等驱动程序的开发经验; 嵌入式硬件工程师 职位名称:嵌入式硬件工程师性别:男 待遇: 6000-10000人数: 5 2009-2-22 人气: 3180时间: 21:08:09工作方式:全职 职位描述及要求: 必须两年以上工作经验。 1、熟悉51系列单片机、熟悉嵌入式系统硬件电路设计; 2、Cadence、Pads、Altium Designer(protel)三种软件中熟练掌握一种用法,能够轻松绘制4层及4层以下PCB板。 2、单片机、嵌入式系统的产品样机焊接、调试及测试。 3、有扎实的模拟电路、数字电路设计及分析能力。 4、有大量的项目开发经验者优先、3年以上工作经验者优先。
岗位说明书系列 嵌入式硬件工程师岗位工 作职责 (标准、完整、实用、可修改)
编号:FS-QG-68741嵌入式硬件工程师岗位工作职责Embedded hardware engineer job responsibilities 说明:为规划化、统一化进行岗位管理,使岗位管理人员有章可循,提高工作效率与明确责任制,特此编写。 简介:嵌入式系统是一种专用的计算机系统,作为装置或设备的一部分。通常,嵌入式系统是一个控制程序存储在ROM中的嵌入式处理器控制板。事实上,所有带有数字接口的设备,如手表、微波炉、录像机、汽车等,都使用嵌入式系统,有些嵌入式系统还包含操作系统,但大多数嵌入式系统都是由单个程序实现整个控制逻辑。从应用对象上加以定义,嵌入式系统是软件和硬件的综合体,还可以涵盖机械等附属装置。国内普遍认同的嵌入式系统定义为:以应用为中心,以计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗等严格要求的专用计算机系统。 嵌入式职位描述(模板一) 岗位职责:
1、负责智能硬件产品的底层软件开发; 2、负责智能硬件产品的生产测试软件开发; 3、负责智能硬件产品人机交互开发; 4、负责蓝牙等接口开发。 任职要求: 1、本科及以上学历; 2、具有良好的逻辑思维能力,学习能力强; 3、有良好的C语言基础,能够快速学习新的Soc的SDK,并利用其开发相关应用; 4、熟悉主流单片机系统的开发环境编程(KEIL、IAR等),调试,烧录; 5、熟悉蓝牙、wifi等常见的无线通信协议,有做过低功耗蓝牙产品经验者优先; 6、熟悉UART、SPI、I2C、USB等接口; 7、有生产测试软件开发相关经验者优先; 8、英文阅读能力良好,能快速学习新的硬件设备的SPEC 文档; 9、能够顶住比较大的工作压力,能够跟团队成员融洽相
嵌入式硬件助理工程师认证考试试题题库 一、选择题 1、以下说法不正确的是(B )。 A、任务可以有类型说明 B、任务可以返回一个数值 C、任务可以有形参变量 D、任务是一个无限循环 2、用图形点阵的方式显示一个16*16点阵汉字需要(B )字节。 A、8 B、32 C、16 D、64 3、下列描述不属于RISC计算机的特点的是(C)。 A.流水线每周期前进一步。 B.更多通用寄存器。 C.指令长度不固定,执行需要多个周期。 D.独立的Load和Store指令完成数据在寄存器和外部存储器之间的传输。 4、存储一个32位数0x2168465到2000H~2003H四个字节单元中,若以大端模式存储,则 2000H存储单元的内容为( D)。 A、0x21 B、0x68 C、0x65 D、0x02 5、μCOS-II中对关键代码段由于希望在执行的过程中不被中断干扰,通常采用关中断的方式,以下X86汇编代码正确而且不会改变关中断之前的中断开关状态的是(D) A. 先CLI、执行关键代码、再STI B. 先STI、执行关键代码、再CLI C. 先POPF、CLI、执行关键代码、再PUSHF D. 先PUSHF、CLI、执行关键代码、再POPF。 6、RS232-C串口通信中,表示逻辑1的电平是(D )。 A、0v B、3.3v C、+5v~+15v D、-5v~-15v 7、ARM汇编语句“ADD R0, R2, R3, LSL#1”的作用是(A)。 A. R0 = R2 + (R3 << 1) B. R0 =( R2<< 1) + R3 C. R3= R0+ (R2 << 1) D. (R3 << 1)= R0+ R2 8、IRQ中断的入口地址是( C)。 A、0x00000000 B、0x00000008 C、0x00000018 D、0x00000014 9、S3C2420X I/O口常用的控制器是(D)。 (1)端口控制寄存器(GPACON-GPHCON)。
必读:嵌入式系统基础知识总结 2016-07-22电子发烧友网 本文主要介绍嵌入式系统的一些基础知识,希望对各位有帮助。 嵌入式系统基础 1、嵌入式系统的定义 (1)定义:以应用为中心,以计算机技术为基础,软硬件可裁剪,适应应用系统对功能、可靠性、成本、体积、功耗严格要求的专用计算机系统。 (2)嵌入式系统发展的4个阶段:无操作系统阶段、简单操作系统阶段、实时操作系统阶段、面向Internet阶段。 (3)知识产权核(IP核):具有知识产权的、功能具体、接口规范、可在多个集成电路设计中重复使用的功能模块,是实现系统芯片(SOC)的基本构件。(4)IP核模块有行为、结构和物理3级不同程度的设计,对应描述功能行为的不同可以分为三类:软核、固核、硬核。 2、嵌入式系统的组成 包含:硬件层、中间层、系统软件层和应用软件层 (1)硬件层:嵌入式微处理器、存储器、通用设备接口和I/O接口。 嵌入式核心模块=微处理器+电源电路+时钟电路+存储器
Cache:位于主存和嵌入式微处理器内核之间,存放的是最近一段时间微处理器使用最多的程序代码和数据。它的主要目标是减小存储器给微处理器内核造成的存储器访问瓶颈,使处理速度更快。 (2)中间层(也称为硬件抽象层HAL或者板级支持包BSP). 它将系统上层软件和底层硬件分离开来,使系统上层软件开发人员无需关系底层硬件的具体情况,根据BSP层提供的接口开发即可。 BSP有两个特点:硬件相关性和操作系统相关性。 设计一个完整的BSP需要完成两部分工作: A、嵌入式系统的硬件初始化和BSP功能。 片级初始化:纯硬件的初始化过程,把嵌入式微处理器从上电的默认状态逐步设置成系统所要求的工作状态。 板级初始化:包含软硬件两部分在内的初始化过程,为随后的系统初始化和应用程序建立硬件和软件的运行环境。 系统级初始化:以软件为主的初始化过程,进行操作系统的初始化。 B、设计硬件相关的设备驱动。 (3)系统软件层:由RTOS、文件系统、GUI、网络系统及通用组件模块组成。RTOS是嵌入式应用软件的基础和开发平台。 (4)应用软件:由基于实时系统开发的应用程序组成。
中山大学竞争性谈判采购公告 项目编号:中大招(货)[2010]038号 项目名称:中山大学医学院多功能酶标仪采购项目 附件: 多功能酶标仪,1套,要求如下:: 一.主要功能 1. 紫外和可见光吸收光(连续波长); 2. 荧光(FI);3.时间分辨荧光(TRF);4. 荧光偏振(FP);5. 化学发光(延时和瞬时) 二.主要技术参数 全波长吸收光、孔域扫描、荧光、时间分辨荧光、荧光偏振、荧光共振能量转移FRET、发光共振能量转移BRET、化学发光-闪光和辉光、双注射器; 1 吸收光模块:波长范围200-999nm,0-4.0 OD的检测范围; 2 发光模块: 液导光纤,低噪音PMT,动态范围不小于6个数量级;灵敏度≦30 amol of ATP/well (96孔板); 3 荧光模块: 3.1 荧光强度灵敏度≦1 pM fluorescein;3.2 时间分辨荧光灵敏度≦80 fM of Europium;3.3 可作荧光偏振FP,荧光偏振FP精确度3 mP at 1 nM fluorescein;3.4 荧光偏振FP使用二向色镜,光源可选择卤钨灯或高能DPR氙灯;3.5 具有顶部/底部探头:顶部探头位置可调,顶部探头荧光的灵敏度≦0.5fmol/孔;底部探头的灵敏度≦1.9fmol/孔。 4 通量≥384孔板; 5 读板速度:96孔板≦14 s,384孔板≦30 s,1536孔板≦47 s; 6具有光路径长度校正功能。; 7 双注射器:加样体积:5-1000ul,1nl递增,死体积≦40ul,分液速度可调; 8 软件:可以连接主要功能,最近使用的文件,并可直接进入预编好的程序和实验表中挑选,可对连接的仪器进行程序化操作步骤(读板, 分液, 震荡, 静置, 孵育等.),可在一块或多块板上进行多组数据, 多个动力学结果分析; 9有温度孵育(室温+4-50℃)和振板摇床功能; 三.配置 1.吸收光检测 1.1 光源:卤钨灯或高能DPR氙灯; 1.2 波长选择:单色器; 1.3 单色器带宽: 2.4nm; 1.4 连续波长,波长范围:200-999nm,1nm递增可调; 1.5 动态范围:0-4 OD; 1.6 分辨率:0.0001 OD1.7 单色器波长准确性:+/- 2 nm1.8 单色器波长可重复性:+/- 0.2 nm1.9 OD 准确性:< 1% at 2 OD typical,< 3%/ 3.0
软件工程师笔试题(C/C++) 2008-03-25 18:19 预处理器(Preprocessor) 1. 用预处理指令#define 声明一个常数,用以表明1年中有多少秒(忽略闰年问题) #define SECONDS_PER_YEAR (60 * 60 * 24 * 365)UL 我在这想看到几件事情: 1). #define 语法的基本知识(例如:不能以分号结束,括号的使用,等等) 2). 懂得预处理器将为你计算常数表达式的值,因此,直接写出你是如何计算一年中有多少秒而不是计算出实际的值,是更清晰而没有代价的。 3). 意识到这个表达式将使一个16位机的整型数溢出-因此要用到长整型符号L,告诉编译器这个常数是的长整型数。 4). 如果你在你的表达式中用到UL(表示无符号长整型),那么你有了一个好的起点。记住,第一印象很重要。 2. 写一个"标准"宏MIN,这个宏输入两个参数并返回较小的一个。 #define MIN(A,B) ((A) <= (B) (A) : (B)) 这个测试是为下面的目的而设的: 1). 标识#define在宏中应用的基本知识。这是很重要的,因为直到嵌入(inline)操作符变为标准C的一部分,宏是方便产生嵌入代码的唯一方法,对于嵌入式系统来说,为了能达到要求的性能,嵌入代码经常是必须的方法。 2). 三重条件操作符的知识。这个操作符存在C语言中的原因是它使得编译器能产生比if-then-else更优化的代码,了解这个用法是很重要的。 3). 懂得在宏中小心地把参数用括号括起来 4). 我也用这个问题开始讨论宏的副作用,例如:当你写下面的代码时会发生什么事? least = MIN(*p++, b); 3. 预处理器标识#error的目的是什么? 如果你不知道答案,请看参考文献1。这问题对区分一个正常的伙计和一个书呆子是很有用的。只有书呆子才会读C语言课本的附录去找出象这种 问题的答案。当然如果你不是在找一个书呆子,那么应试者最好希望自己不要知道答案。 死循环(Infinite loops)
项目编号:中大招(特)[2011]023号 项目名称:中山大学公卫学院激光共聚焦扫描显微镜采购项目 附件: 激光共聚焦扫描显微镜,1套,要求如下: (一)光学共聚焦扫描系统: 1) 检测成像通道:物理通道数5个,其中荧光通道4个,透射光DIC通道不少于1个。 2) 荧光检测通道均可使用狭缝光谱扫描技术,可进行400~800nm连续无极的光谱扫描; 3) 荧光检测器的要求:有1个荧光通道采用磷砷化镓(GaAsP)超高灵敏度探测器;对极弱荧光信号或者单分子荧光信号可进行检测。另外,荧光检测器提供2个的大靶面探测器(PMT)。 4) 采用单针孔, 各通道扫描图像无错位问题; 5) 激光能快速的双向来回扫描,在扫描完的回程中可进行图象采集,便于快速的FRAP试验; 6) 自动焦面控制系统,通过850nm的LED光对焦面进行实时自动校准; 7) 扫描图像分辨率(不管是二维还是三维图象)均可达到8192X8192以上,线扫描速度可达2800线/秒; 8) 扫描镜:扫描镜采用X2Y三镜扫描; 9) 扫描旋转:自由旋转200°,可在扫描过程中任意旋转; 10) 扫描视场:22mm; 11) 扫描速度: 5帧/秒(512x512 象素); 12) 共聚焦分析软件系统能控制快速制冷CCD,在不开激光的情况下,共焦软件系统能与CCD、显微镜、快速外置滤块转盘、荧光光源、CO2系统组成完整的活细胞观察系统; (二)激光器及相关配置: 由AOTF声光调制器控制所有激光谱线: Ar:458/476/488/514 nm 65mW,有4条谱线; HeNe: 543 nm 1mW, HeNe: 633 nm 10mW。 近紫外激光器:405nm 50mW (三)智能型倒置显微镜主机配置: 1) 采用全自动研究级倒置荧光显微镜。由计算机的激光共聚焦扫描软件系统全自动控制;含明场、荧光、DIC、等基本功能 2) 显微镜通过一个智能外置控制器控制,快速方便,无需接触显微镜,减少样品的污染机会和显微镜震
《光电仪器系统设计》复习 注:以下题目的答案仅供参考,部分题目的答案可能不够完整与严格。 第一章概论 一、什么是光电仪器,其基本作用有那些? 以光学原理为基础,综合采用电子、计算机、机械等其他技术的各类仪器,用于对物质实体及其属性进行观察、监测、测定、验证、传输、变换、显示、分析处理与控制。 二、光电仪器的基本构成包括哪几部分,涉及哪些内容? 光电仪器的构成——三大部分 ●机械部分:仪器的传动机构、联接机构、调整机构和壳体等 ●电子与微机控制部分:各种电子线路、照明、显示和计算机控制等 ●光学部分:由各种透镜、棱镜、平面镜、光栅和光纤等元件组合而成 三、光电仪器设计的指导思想是什么? (1) 仪器的性能指标确定要合理,综合考虑应用场合和整体性能 (2) 经济性:不盲目追求复杂、高级方案,尽可能采用最简单、最经济的设计方案满足所提出的功能要求。 (3) 可靠性:可靠性差,就没有使用价值。 (4) 环保与安全性:不污染环境,对操作人员没有伤害。 (5) 效率:尽可能提高测量速度 (6) 寿命:充分考虑器件的寿命,易耗元件的更换,维护的方便。 (7) 封装和造型:总体结构安装、部件建的造型、细部美化等都要考虑,尽量使产品。 (8) 操作方便:操作要符合人们的习惯,尽可能节省人的体力和脑力。 四、光电仪器设计的原则是什么? (1) 从原理上提高性能的原则 (2) 精度匹配原则:在分析基础上,对各部分精度分配恰当 (3) 最短传动链原则:影响精度的测量和传动链最短,零部件最少 (4) 零部件的标准化、系列化和通用化原则
(5) 便于加工和生产的原则 (6) 最佳性价比的原则 五、光学仪器如何进行分类? ①按光学工作原理: ●反射原理:采用各种反射镜及其组合:潜艇观察镜、反光镜等 ●成像原理:显微、望远、投影、照相、OCT等 ●物理光学:干涉、衍射、偏振等 ●导波光学:纤维光学和波导光电仪器等 ②按经典光学应用分类: ●观察仪器:望远镜、显微镜等 ●测量仪器:测距仪、干涉仪、OCT等 ●瞄准: ●摄像:照相机 ③按光谱波段分类: ●可见光仪器:目视光学仪器、可见光成像仪器 ●红外光学仪器:红外夜视仪器、空间红外探测仪器 ●紫外光学仪器:紫外成像仪器、光刻机器 ④按现代光学用途分类: ●民用光电仪器:普通目视光学仪器、可见光成像仪器、CCD观察及成像仪器等 ●军用光电仪器:观测仪器、头盔夜视仪、空间红外探测仪器、各种军用装备等 ●空间光电仪器:飞机机载光电仪器、卫星光电仪器 六、光学仪器设计包括哪些程序? (1) 确定设计任务:根据用户需求、发展要求来确定 (2) 调研:了解国内外同类产品、性能和特点 (3) 分析设计任务,制定设计任务书 (4) 方案设计: ①实现功能分析;