城市道路交通信号控制方式适用规范1范围 本标准规定了不同信号控制方式的适用基本原则、多相位控制方式设计原则以及采用不同控制方式的技术-经济评价方法。 本标准适用于城市道路交通信号控制方式的设计和建设。 2规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本标准。 GA/T 509-2004城市交通信号控制系统术语 3术语和定义 GA/T 509-2004中确立的术语和定义适用于本标准。 4单点多时段定时控制方式、单点感应控制方式、线协调控制方式、区域协调控制方式适用基本原则单点多时段定时控制方式、单点感应控制方式、线协调控制方式、区域协调控制方式均应根据交通需求和道路条件选定,并需进行技术-经济评价。 在选用某种控制方式时,宜采用计算机仿真技术进行分析比较和配时方案的优化。 4.1单点多时段定时控制方式适用原则 单点多时段定时控制方式是最基本、最经济的控制方式。 当交通状况符合总体流量稳定、变化比较规律的条件时,可选用此种控制方式。 4.2单点感应控制方式适用原则
4.2.1当单点控制的交叉口交通状况变化比较频繁且没有规律时,宜采用单点感应控制。 4.2.2单点感应控制一般在交叉口进口车道设置检测器或在人行横道线前设置行人按钮,信号配时参数可随检测到的信息而改变。 4.2.3单点感应控制分为半感应控制和全感应控制。 在支路流量比较小的信号控制交叉口或路段的人行横道处,可采用半感应控制。在支路上设置检测器或在人行横道处设置行人按钮,根据是否有交通需求而确定是否运行该相位,并根据交通需求情况确定相应相位时间。 在各进口流量相近,且变化较为频繁的信号控制交叉口宜采用全感应控制方式。若单个路口信号机有能力根据检测的实时交通状况进行配时优化,也可实现单点优化控制。 4.3线协调控制方式适用原则 4.3.1当需要在单点控制的基础上扩大控制范围,对若干连续交叉口形成的线路上进行协调控制以提高整体通行效率时,可采用线协调控制方式。 4.3.2采用此种控制方式时,针对若干连续交叉口设计一种相互协调的配时方案,通过时钟同步,各交叉口的信号机按预设方案协调运行。 4.3.3线协调控制方式应考虑相邻交叉口的距离。通常若路口间距离大于800 m以上时,会降低路口间的协调效果。 4.3.4线协调控制通常采用无电缆线协调控制方式。 交通状况符合总体流量稳定、变化比较规律的条件时,可选用此种控制方式,但不能适应随机性较强的交通。 采用此种控制方式,宜进行事前交通调查,根据调查结果设定控制参数,并应根据交通变化情况适时调整控制参数,以取得较好的控制效果。 无电缆线协调控制方式若适当设置检测器,应用感应控制,可根据交通需求调整绿信比,提高控制效果。 4.4区域协调控制方式适用原则
我国城市交通信号控制的现状与发展 二零一二年四月
本论文的背景和意义 背景:我国近年城市交通信号控制的情况 意义:1、减少交通事故,增加交通安全。 2、缓和交通拥挤、堵塞,提高运行效率。 3、节约能耗,降低车辆对环境的污染。 本论文的主要内容 分析我国城市交通信号控制的现状、存在问题以及发展趋势。 本论文的结构安排 本论文主要分为两大部分: 第一部:分分析我国交通信号控制的现状以及存在问题; 1、我国城市交通状况 2、城市交通信号控制系统应用现状 3、国内交通信号控制系统问题分析 第二部分:分析我过交通信号控制的发展趋势。 1、交通系统的发展历程 2、我国一些城市的发展计划和目标
正文 第一部分:分析我国交通信号控制的现状以及存在问题 1、我国城市交通状况 我国城市交通面临的总体形势:城市化势头迅猛、机动车拥有量增长迅速、道路交通基础设施落后、交通结构和路网结构不尽合理、市民的交通法规意识和交通安全常识缺乏,交通管理措施不完善、管理效率低下、城市交通拥挤严重、社会消耗巨大、交通事故多发、汽车废气对城市环境污染严重。因此,在对我国城市交通目前的状况进行全面把握和详细解剖的基础上,探索解决我国城市交通问题行之有效的办法,展望城市道路交通的发展趋势和特点,探讨适合我国城市道路交通特点的道路交通管理发展战略,具有重要意义。而交通控制实际上属于交通管理的范畴,交通控制是交通管理的某一表现方式。 将城市道路互相连起来构成道路交通网的城市道路平面交叉口,是造成车流中断、事故增多、延误严重的问题所在,是城市交通运输的瓶颈。交叉口的通行能力又是决定道路通行能力的关键所在,对城市交通网络的交叉口信号控制系统进行协调优化控制,对提高道路通行能力和服务水平具有重要意义。 2、城市交通信号控制系统应用现状 交通控制的发展经历了点控、线控和面控3个阶段。把控制对象区域内全部交通信号的控制作为一个交通控制中心管理下的整体控制系统,是单点信号、干线信号和网络信号系统的综合控制系统。 随着计算机技术和自动控制技术的发展,以及交通流理论的不断完善,交通运输组织与优化理论的不断提高,世界上出现了多种城市交通信号控制系统——澳大利亚的SCATS系统、加拿大的RTOP系统、英国的TRANSYT系统和SCOOT系统、美国的UTCS-3GC系统以及ASCOT系统,其中TRANSYT系统、SCOOT系统和SCATS系统正在实践中取得了较好的应用效果,并在世界上很多城市得到广泛应用。 3、国内交通信号控制系统问题分析 上个世纪八十年代至今,北京、上海、天津、沈阳、南宁等中大城市先后引进SCOOT、SCATS、TELVENT等先进的城市交通控制系统,迄今国内已经有30多个城市引进类似系统。本土企业如青岛海信、上海宝康等自1990年后也先后进行了交通信号系统的研发,但总体的技术指标和应用范围与国外系统仍有一定差距。 交通信号系统建设工程是一项投资大、周期长和社会公益性强的系统工程,但目前无论是建设中国本土系统还是引进国外先进系统,许多城市建成后投入应用的城市交通信号系统普遍存在效能发挥不佳、使用不方便、经济效益差等问题,究其原因,排除系统产品本身的质量和功能因素外主要涉及一下几个方面: 1、轻视前期调查。交通调查和基于交通调查数据的交通工程设计是交通信号系 统是否个性化、适应性和效能发挥的关键性工作。遗憾的是,相对信号配时设计,中国内陆城市交通管理者和系统设计施工者对设计前期的交通现场调查、交通流组织、交通流量等分析工作普遍认识不足、重视不够。对交通调查的方法、内容、时间和数据分析缺乏针对性和系统性,导致受控区域的交
系统动态特性分析。 (1)时域响应解析算法――部分分式展开法。 用拉氏变换法求系统的单位阶跃响应,可直接得出输出c(t)随时间t 变化的规律,对于高阶系统,输出的拉氏变换象函数为: s den num s s G s C 11)()(?=? = (21) 对函数c(s)进行部分分式展开,我们可以用num,[den,0]来表示c(s)的分子和分母。 例 15 给定系统的传递函数: 24 50351024 247)(23423+++++++=s s s s s s s s G 用以下命令对 s s G ) (进行部分分式展开。 >> num=[1,7,24,24] den=[1,10,35,50,24] [r,p,k]=residue(num,[den,0]) 输出结果为 r= p= k= -1.0000 -4.0000 [ ] 2.0000 -3.0000 -1.0000 -2.0000 -1.0000 -1.0000 1.0000 0 输出函数c(s)为: 01 11213241)(+++-+-+++-= s s s s s s C 拉氏变换得: 12)(234+--+-=----t t t t e e e e t c (2)单位阶跃响应的求法: 控制系统工具箱中给出了一个函数step()来直接求取线性系统的阶跃响应,如果已知传递函数为: den num s G = )( 则该函数可有以下几种调用格式: step(num,den) (22) step(num,den,t) (23) 或 step(G) (24) step(G,t) (25) 该函数将绘制出系统在单位阶跃输入条件下的动态响应图,同时给出稳态值。对于式23和25,t 为图像显示的时间长度,是用户指定的时间向量。式22和24的显示时间由系统根据输出曲线的形状自行设定。
第六章交通信号控制理论基础 经过调查统计发现,将城市道路相互连接起来构成道路交通网的城市道路平面交叉口,是造成车流中断、事故增多、延误严重的问题所在,是城市交通运输的瓶颈。一般而言,交叉口的通行能力要低于路段的通行能力,因此如何利用交通信号控制保障交叉口的交通安全和充分发挥交叉口的通行效率引起了人们的高度关注。 交通信号控制是指利用交通信号灯,对道路上运行的车辆和行人进行指挥。交通信号控制也可以描述为:以交通信号控制模型为基础,通过合理控制路口信号灯的灯色变化,以达到减少交通拥挤与堵塞、保证城市道路通畅和避免发生交通事故等目的。其中,交通信号控制模型是描述交通性能指标(延误时间、停车次数等)随交通信号控制参数(信号周期、绿信比和信号相位差),交通环境(车道饱和流量等),交通流状况(交通流量、车队离散性等)等因素变化的数学关系式,它是交通信号控制理论的研究对象,也是交通工程学科赖以生存和发展的基础。 本章主要针对建立交通信号控制模型所涉及到的基本概念、基本理论与基本方法,对交通信号控制的理论基础进行较为全面深入的阐述。 6.1交通信号控制的基本概念 城市道路平面交叉口是道路的集结点、交通流的疏散点,是实施交通信号控制的主要场所。根据交叉口的分岔数平面交叉口可以分为三岔交叉口、四岔交叉口与多岔交叉口;根据交叉口的形状平面交叉口可以分为T型交叉口、Y型交叉口、十字型交叉口、X型交叉口、错位交叉口、以及环形交叉口等。 6.1.1交通信号与交通信号灯 交通信号是指在道路上向车辆和行人发出通行或停止的具有法律效力的灯色信息,主要分为指挥灯信号、车道灯信号和人行横道灯信号。交通信号灯则是指由红色、黄色、绿色的灯色按顺序排列组合而成的显示交通信号的装置。世界各国对交通信号灯各种灯色的含义都有明确规定,其规定基本相同。我国对交通信号灯的具体规定简述如下:对于指挥灯信号: 1、绿灯亮时,准许车辆、行人通行,但转弯的车辆不准妨碍直行的车辆和被放行的行人通行; 2、黄灯亮时,不准车辆、行人通行,但已越过停止线的车辆和已进入人行横道的行人,可以继续通行;
结构动力特性的测试方法及应用(讲稿) 一. 概述 每个结构都有自己的动力特性,惯称自振特性。了解结构的动力特性就是进行结构抗震设 计与结构损伤检测的重要步骤。目前,在结构地震反应分析中,广泛采用振型叠加原理的反应谱分析方法,但需要以确定结构的动力特性为前提。n 个自由度的结构体系的振动方程如下: [][][]{}{})()()()(...t p t y K t y C t y M =+??????+?????? 式中[]M 、[]C 、[]K 分别为结构的总体质量矩阵、阻尼矩阵、刚度矩阵,均为n 维矩阵;{} )(t p 为外部作用力的n 维随机过程列阵;{})(t y 为位移响应的n 维随机过程列阵;{})(t y &为速度响应的n 维随机过程列阵;{})(t y && 为加速度响应的n 维随机过程列阵。 表征结构动力特性的主要参数就是结构的自振频率f (其倒数即自振周期T )、振型Y(i)与阻尼比ξ,这些数值在结构动力计算中经常用到。 任何结构都可瞧作就是由刚度、质量、阻尼矩阵(统称结构参数)构成的动力学系统,结构一旦出现破损,结构参数也随之变化,从而导致系统频响函数与模态参数的改变,这种改变可视为结构破损发生的标志。这样,可利用结构破损前后的测试动态数据来诊断结构的破损,进而提出修复方案,现代发展起来的“结构破损诊断”技术就就是这样一种方法。其最大优点就是将导致结构振动的外界因素作为激励源,诊断过程不影响结构的正常使用,能方便地完成结构破损的在线监测与诊断。从传感器测试设备到相应的信号处理软件,振动模态测量方法已有几十年发展历史,积累了丰富的经验,振动模态测量在桥梁损伤检测领域的发展也很快。随着动态测试、信号处理、计算机辅助试验技术的提高,结构的振动信息可以在桥梁运营过程中利用环境激振来监测,并可得到比较精确的结构动态特性(如频响函数、模态参数等)。目前,许多国家在一些已建与在建桥梁上进行该方面有益的尝试。 测量结构物自振特性的方法很多,目前主要有稳态正弦激振法、传递函数法、脉动测试法与自由振动法。稳态正弦激振法就是给结构以一定的稳态正弦激励力,通过频率扫描的办法确定各共振频率下结构的振型与对应的阻尼比。 传递函数法就是用各种不同的方法对结构进行激励(如正弦激励、脉冲激励或随机激励等),测出激励力与各点的响应,利用专用的分析设备求出各响应点与激励点之间的传递函数,进而可以得出结构的各阶模态参数(包括振型、频率、阻尼比)。脉动测试法就是利用结构物(尤其就是高柔性结构)在自然环境振源(如风、行车、水流、地脉动等)的影响下,所产生的随机振动,通过传感器记录、经谱分析,求得结构物的动力特性参数。自由振动法就是:通过外力使被测结构沿某个主轴方向产生一定的初位移后突然释放,使之产生一个初速度,以激发起被测结构的自由振动。 以上几种方法各有其优点与局限性。利用共振法可以获得结构比较精确的自振频率与阻尼比,但其缺点就是,采用单点激振时只能求得低阶振型时的自振特性,而采用多点激振需较多的设备与较高的试验技术;传递函数法应用于模型试验,常常可以得到满意的结果,但对于尺度很大的实际结构要用较大的激励力才能使结构振动起来,从而获得比较满意的传递函数,这在实际测试工作中往往有一定的困难。 利用环境随机振动作为结构物激振的振源,来测定并分析结构物固有特性的方法,就是近年来随着计算机技术及FFT 理论的普及而发展起来的,现已被广泛应用于建筑物的动力分析研究中,对于斜拉桥及悬索桥等大型柔性结构的动力分析也得到了广泛的运用。斜拉桥或悬索桥的环境随机振源来自两方面:一方面指从基础部分传到结构的地面振动及由于大气变化而影响到上部结构的振动(根据动力量测结果,可发现其频谱就是相当丰富的,具有不同的脉动卓越周期,反应了不同地区地质土壤的动力特性);另一方面主要来自过桥车辆的随机振动。
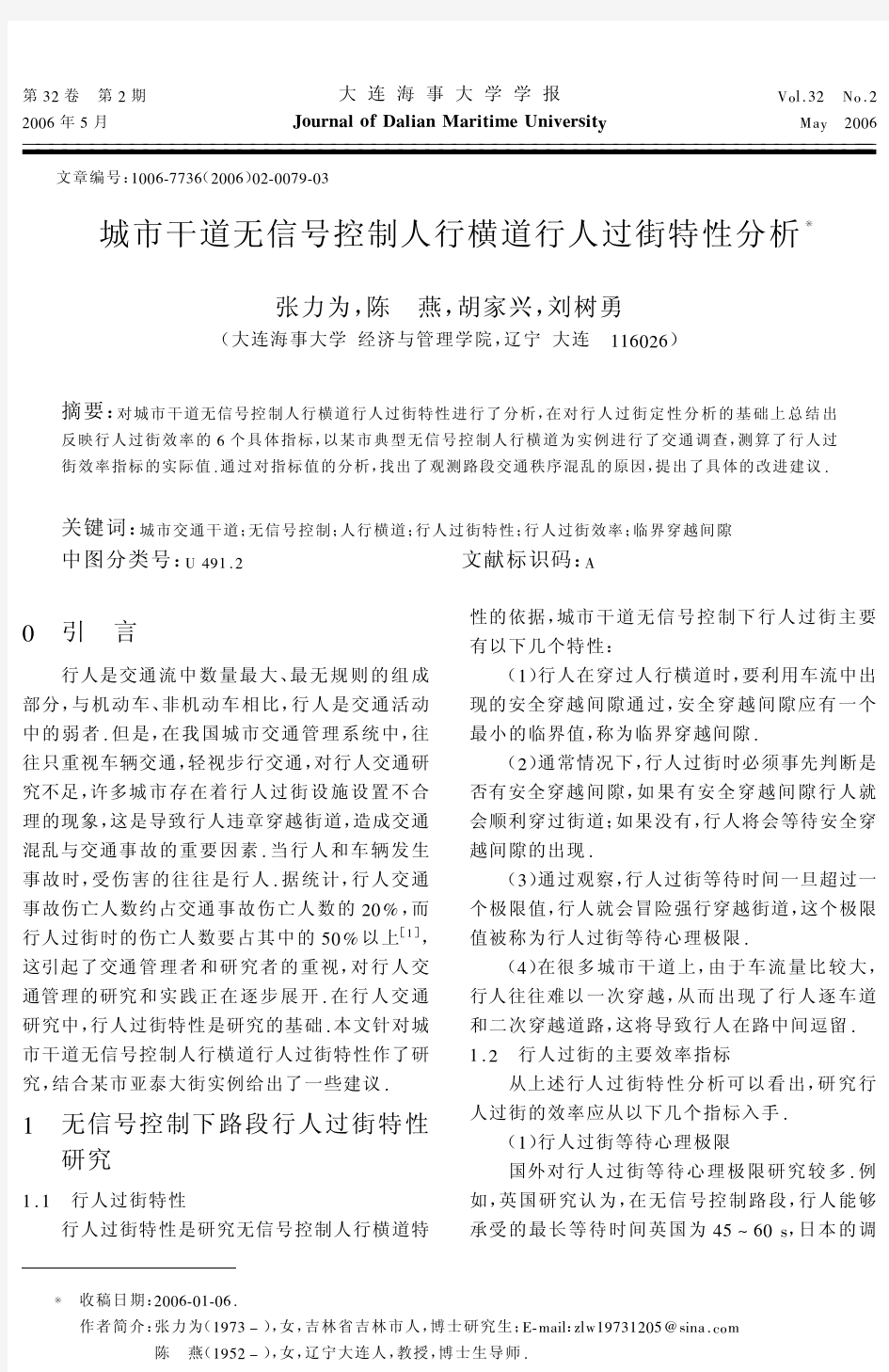
城市道路智能交通信号控制系统 智能交通信号控制系统是城市道路交通管理系统中对交叉路口、行人过街,以及环路出入口采用信号控制的子系统,是运用了交通工程学、心理学、应用数学、自动控制与信息网络技术以及系统工程学等多门学科理论的应用系统。 主要包括交通工程设计、车辆信息采集、数据传输与处理、控制模型算法与仿真分析、优化控制信号调整交通流等。国内外各大中城市已有的交通信号控制系统就是根据不同环境条件,基于各自城市道路的规划和发展水平建立起来的。 国家重点基础研究规划(973)项目“信息技术与高性能软件”中设立的二级课题“城市交通监控系统”,结合我国城市交通发展的特点,确定了建立实时自适应的城市道路智能交通信号控制系统的智能化管理的发展方向。 智能交通信号控制系统的基本组成 智能交通信号控制系统的基本组成是主控中心、路口交通信号控制机以及数据传输设备。其中主控中心包括操作平台、交互式数据仓、效益指标优化模型、数据(图象)分析处理等。具体结构框架见下图。
城市道路智能交通信号控制系统框架 智能交通信号控制系统的核心 智能交通信号控制系统的核心是控制模型算法软件,是贯穿规划设计在内的信号控制策略的管理平台,体现着交通管理者的控制思想,它包括信号控制系统将起到的作用和地位。 目前,国内外已应用的信号控制系统大多是以优化定周期方案、优化路口绿信号配比以及协调相关路口通行能力为基础的,是根据历史数据和自动检测到的车流量信息,通过设置的控制模型算法选取适当的信号配比控制方案,是被动的控制策略。 应用较多的核心软件即效益指标优化模型的是英国运输和道路研究所(TRRL)
研制的SCOOT系统(Split Cycle Offset Optimization Technique)和澳大利亚悉尼为应用背景开发的SCATS系统 (Sydney Coordinated Adaptive Traffic System),他们是动态的实时自适应控制系统的早期代表,也是未来一个时期交通信号控制系统智能化发展的开发基础。 随着网络技术的发展,交互式控制策略使信号控制由感控到诱导实现了真正的智能,交通信号控制系统不仅可以检测到车流量等交通信息参数,调控路口绿信号配比,变化交通限行、禁行等指路标志,还可以根据系统联接的数据仓完成与交通参与者之间的信息交换,向交通参与者显示道路交通信息、停车场信息,提供给交通参与者合理的行驶线路,以达到均衡道路交通负荷的主动的控制策略。 尤其重要的是计算机网络技术和数字化使数据传输和信息利用得到了可靠保证。可以说,城市道路智能交通信号控制系统是城市道路交通管理随着信息产业技术迅猛发展的综合产物。 交通信号控制系统的主要术语和参数 周期:是指信号灯色发生变化,显示一个循环所需的时间,也称周期长,即红、黄、绿灯时间之和。 相位:即信号相位,是指在周期时间内按需求人为设定的,同时取得通行权的一个或几个交通流的序列组。 相位差:具有相同周期长的相关路口,在同方向上的两个相关相位的启动时间差,称为相位差。 绿信比:是指在周期长内的各相位绿灯时间与周期长之比。 饱和流量:是衡量路口交通流施放能力的重要参数,通常是指一个绿灯时间内的连续通过路口的最大车流量。 流量系数:是实际流量与饱和流量的比值。既是计算信号配时的重要参数,又是衡量路口阻塞程度的一个尺度。 绿灯间隔时间:是指从失去通行权的相位的绿灯结束,到下一个得到通行权的相位绿灯开始所用的时间。 有效绿灯时间:是指被有效利用的实际车辆通行时间。它等于绿灯时间与黄灯
实验二、 系统解耦控制 一、实验目的 1、 掌握解耦控制的基本原理和实现方法。 2、 学习利用模拟电路实现解耦控制及实验分析。 二、实验仪器 1、 TDN —AC/ACS 型自动控制系统实验箱一台 2、 示波器 3、 万用表 三、实验原理与内容 一般多输入多输出系统的矩阵不是对角阵,每一个输入量将影响所有输出量,而每一个输出量同样受到所有输入量的影响,这种系统称为耦合系统。系统中引入适当的校正环节使传递矩阵对角化,实现某一输出量仅受某一输入量的控制,这种控制方式为解耦控制,其相应的系统称为解耦系统。解耦系统输入量与输出量的维数必相同,传递矩阵为对角阵且非奇异。 1、 串联控制器()c G s 实现解耦。 图2-1用串联控制器实现解耦 耦合系统引入控制器后的闭环传递矩阵为 1 ()[()()()]()()p c p c s I G s G s H s G s G s -Φ=+ 左乘[()()()]p c I G s G s H s +,整理得 1()()()[()()]p c G s G s s I H s s -=Φ-Φ 式中()s Φ为所希望的对角阵,阵中各元素与性能指标要求有关, 在()H s 为对角阵的条件下,1 [()()]I H s s --Φ仍为对角阵, 1 1 ()()()[()()]c p G s G s s I H s s --=Φ-Φ
设计串联控制器()c G s 可使系统解耦。 2、 用前馈补偿器实现解耦。 解耦系统如图2-2, 图2-2 用前馈控制器实现解耦 解耦控制器的作用是对输入进行适当变换实现解耦。解耦系统的闭环传递函数 1()[()]()()p p d s I G s G s G s -Φ=+ 式中()s Φ为所希望的闭环对角阵,经变换得前馈控制器传递矩阵 1()()[()]()d p p G s G s I G s s -=+Φ 3、 实验题目 双输入双输出单位反馈耦合系统结构图如图。 图2-3 系统结构图 设计解耦控制器对原系统进行解耦,使系统的闭环传递矩阵为 10 (1) ()10(51)s s s ????+? ?Φ=? ???+? ? 通过原系统输出量(1,2y y )与偏差量(1,2e e )之间的关系
Spider-20是一款紧凑而强大的无线动态信号分析仪和数据采集仪。它提供4个24位高精确高保真输入通道,和一个独特的软件可选的转速计输入信号源输出通道(使用传统的BNC连接器)。每个输入可单独编程接受AC或DC电压或从一个内置电子IEPE(ICP)传感器输出。Spider20 的尺寸为13.5*10.9*3.25cm,可充电,内置闪卡,内置WIFI接口。 使用iPAD可以设置、查看或记录历史信号,以及执行频谱分析、测量频率响应函数FRF和相干函数。将它连接到笔记本或PC电脑还可享受我们EDM软件提供的全部软件功能,包括1/N倍频程声学功能、旋转机械阶次跟踪,冲击响应谱测试或专用的数字滤波器等。 Spider-20 完全脱离PC操作,只需用手进入黑盒操作模式,利用我们灵活的自动测试计划和阈值检测软件使Spider-20变成一个智能化无人监控能够响应数据条件或网络指令,通过邮件向您发送通知。是有线款动态信号分析仪和数据采集仪,用有线以太网连接取代了Wi-Fi,与Spider-20 技术指标和功能相同。 Spider-20特点 超便携易用性:重量只有560g 高精度性:24位分辨率,100dB动态输入
范围内置WIFI,4G闪存,电池保证6小时续航4个输入通道,1个转速输出通道,最高采样率102.4KHz 脱离PC,黑匣子工作模式支持iPAD、笔记本、PC电脑连接操作。 Spider-20功能 实时数据记录,瞬态捕捉转速、相位、轴心轨迹实时数据滤波阶次跟踪倍频程分析与声级计实时算数运算报警监测正弦扫频FRF分析时域统计分析冲击响应谱自动阈值检测任意波形输出传感器校准系统前端校准自功率谱、互功率谱、相干与传递函数。 Spider-20应用 动态信号分析振动测试汽车动力学机械故障诊断模态分析过程监控自动阈值检测声学研究NVH应用机械现场监测全身振动远程监测路谱试验数据采集。
解耦控制系统设计与仿真 姓名: 专业: 学号:
第一章解耦控制系统概述 1.1背景及概念 在现代化的工业生产中,不断出现一些较复杂的设备或装置,这些设备或装置的本身所要求的被控制参数往往较多,因此,必须设置多个控制回路对该种设备进行控制。由于控制回路的增加,往往会在它们之间造成相互影响的耦合作用,也即系统中每一个控制回路的输入信号对所有回路的输出都会有影响,而每一个回路的输出又会受到所有输入的作用。要想一个输入只去控制一个输出几乎不可能,这就构成了“耦合”系统。由于耦合关系,往往使系统难于控制、性能很差。 所谓解耦控制系统,就是采用某种结构,寻找合适的控制规律来消除系统中各控制回路之间的相互耦合关系,使每一个输入只控制相应的一个输出,每一个输出又只受到一个控制的作用。解耦控制是一个既古老又极富生命力的话题,不确定性是工程实际中普遍存在的棘手现象。解耦控制是多变量系统控制的有效手段。 1.2主要分类 三种解耦理论分别是:基于Morgan问题的解耦控制,基于特征结构配置的解耦控制和基于H_∞的解耦控制理论。 在过去的几十年中,有两大系列的解耦方法占据了主导地位。其一是围绕Morgan问题的一系列状态空间方法,这种方法属于全解耦方法。这种基于精确对消的解耦方法,遇到被控对象的任何一点摄动,都会导致解耦性的破坏,这是上述方法的主要缺陷。其二是以Rosenbrock为代表的现代频域法,其设计目标是被控对象的对角优势化而非对角化,从而可以在很大程度上避免全解耦方法的缺陷,这是一种近似解耦方法。
1.3相关解法 选择适当的控制规律将一个多变量系统化为多个独立的单变量系统的控制问题。在解耦控制问题中,基本目标是设计一个控制装置,使构成的多变量控制系统的每个输出变量仅由一个输入变量完全控制,且不同的输出由不同的输入控制。在实现解耦以后,一个多输入多输出控制系统就解除了输入、输出变量间的交叉耦合,从而实现自治控制,即互不影响的控制。互不影响的控制方式,已经应用在发动机控制、锅炉调节等工业控制系统中。多变量系统的解耦控制问题,早在30年代末就已提出,但直到1969年才由E.G.吉尔伯特比较深入和系统地加以解决。 1.3.1完全解耦控制 对于输出和输入变量个数相同的系统,如果引入适当的控制规律,使控制系统的传递函数矩阵为非奇异对角矩阵,就称系统实现了完全解耦。使多变量系统实现完全解耦的控制器,既可采用状态反馈结合输入变换的形式,也可采用输出反馈结合补偿装置的形式。给定n维多输入多输出线性定常系统(A,B,C)(见线性系统理论),将输出矩阵C表示为 为C的第j个行向量,j=1,2,…,m,m为输出向量的维数。再规定一组结构指 数di(i=1,2,…,m):当B=0,AB=0…,AB=0时,取di=n-1;否则,di取为使CiAB≠0的最小正整数N,N=0,1,2,…,n-1。利用结构指数可组成解耦性判别矩阵: 已证明,系统可用状态反馈和输入变换,即通过引入控制规律u=-Kx+Lv,实现完全解耦的充分必要条件是矩阵E为非奇异。这里,u为输入向量,x为状
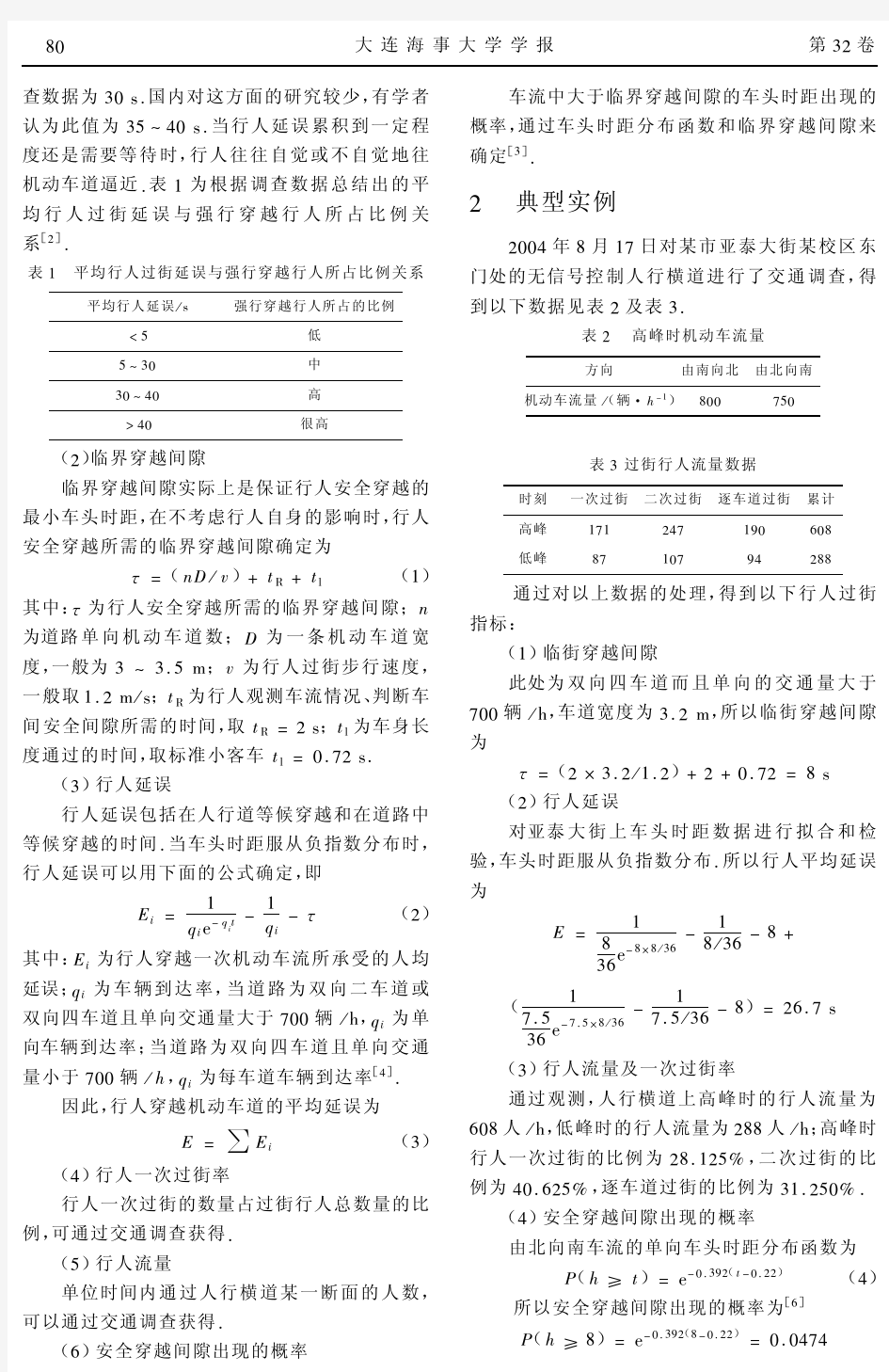
技术篇 2007年 第十期 某装备结构动态特性分析 霍 红 (中北大学,太原 030051) 摘 要:利用试验模态分析法获得了某机枪结构的模态参数,分析了机枪的动态特性,并通过基于模态试验的灵敏度分析方法,获得了影响该机枪动态特性的敏感部位,为改善机枪动态特性提供了依据. 关键词:机枪;灵敏度分析;动态特性;分析 中图分类号:TP302.7 文献标识码:A 文章编号:1005 8354(2007)10 0001 02 Analysis on structural dyna m ic characteristics for certai n equi p m e nt HUO H ong (N orth U n i ve rs i ty o f Ch i na ,T a i yuan 030051,Chi na) Abstract :A ccor ding to modal analysism etho d,modal parametersw ere derived and structural dynam ic charac teristics were analyzed.U sing sensitivit y analysis of model test ,t he dyna m ic characteristics and sensitive p oints of a m achine gun were obt ained.These woul d be used to i m prove dyna m ic propert y of t hemachine gun. K ey words :machine gun;sensitivity analysis ;struct ural dyna m ic characteristics ;analysis 收稿日期:2007 08 22 作者简介:霍红(1968 ),女,实验师,研究方向:火炮、自动武器与弹药工程. 0 引 言 当今为提高自动武器的机动性,广泛采用弹性枪架,但随着重量的减轻,武器系统的振动加剧.而武器系统的振动又直接影响到射击精度,特别是弹丸出膛 口时的横向位移、横向速度以及弹丸初始扰动等对武器射击精度影响尤其明显 [1] .为此,需掌握武器系统 的固有特性,为分析和优化机枪的动力学特性提供依据,以提高其射击精度.而系统固有特性一般可由理论分析方法和试验方法获得,前者是利用有限元分析法,后者是利用试验模态分析法,随着试验技术的发展和测量仪器精度的提高,利用试验模态分析法得到的结果越来越受到重视,并且常常作为验证有限元模型正确性的主要依据,所以,常采用理论分析和试验两种方法相结合建立模型 [1,2] ,以获得接近实际的结 果,为进一步分析如结构修改设计及结构动力特性优化设计提供良好的基础.本文以某机枪为例,采用试验模态分析法识别机枪系统的模态参数和分析其动 态特性,并在此基础上进行了灵敏度分析,获得机枪动力学特性对各参数变化的灵敏度,为机枪的动力学特性优化设计提供依据. 1 机枪结构试验模态分析 1.1 模态测试系统 模态测试系统基本由以下几部分组成:激励部分、信号测量和数据采集部分、信号分析和频响函数 估计部分 [3] .其测试系统框图见图1所示. 图1 机枪模态试验系统框图 1
城市道路交通信号控制方式适用规范(GA527-2005 ) 1 范围 本标准规定了不同信号控制方式的适用基本原则、多相位控制方式设计原则以及采用不同控制方式的技术-经济评价方法。 本标准适用于城市道路交通信号控制方式的设计和建设。 2 规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款。 凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。 凡是不注日期的引用文件,其最新版本适用于本标准。 GA/T 509-2004 城市交通信号控制系统术语 3 术语和定义 GA/T 509-2004中确立的术语和定义适用于本标准。 4 单点多时段定时控制方式、单点感应控制方式、线协调控制方式、区域协调控制方式适用基本原则 单点多时段定时控制方式、单点感应控制方式、线协调控制方式、区域协调控制方式均应根据交通需求和道路条件选定,并需进行技术-经济评价。
在选用某种控制方式时,宜采用计算机仿真技术进行分析比较和配时方案的优化。 4.1 单点多时段定时控制方式适用原则 单点多时段定时控制方式是最基本、最经济的控制方式。 当交通状况符合总体流量稳定、变化比较规律的条件时,可选用此种控制方式。 4.2 单点感应控制方式适用原则 4.2.1 当单点控制的交叉口交通状况变化比较频繁且没有规律时,宜采用单点感应控制。 4.2.2 单点感应控制一般在交叉口进口车道设置检测器或在人行横道线前设置行人按钮,信号配时参数可随检测到的信息而改变。 4.2.3 单点感应控制分为半感应控制和全感应控制。 在支路流量比较小的信号控制交叉口或路段的人行横道处,可采用半感应控制。 在支路上设置检测器或在人行横道处设置行人按钮,根据是否有交通需求而确定是否运行该相位,并根据交通需求情况确定相应相位时间。 在各进口流量相近,且变化较为频繁的信号控制交叉口宜采用全感应控制方式。 若单个路口信号机有能力根据检测的实时交通状况进行配时优化,也可实现单点优化控制。 4.3 线协调控制方式适用原则
论文 专业: 班级: 学生姓名: 学号: 联系方式: 年月日
国内外交通信号控制系统综述 摘要:交通信号控制系统是现代城市交通控制和疏导的主要手段。随着信息技术、人工智能技术、计算机及通信技术的发展,交通信号控制系统也在逐渐完善,本文对国内外主要交通控制系统作了介绍。 关键词:交通信号控制计算机通信 正文: 20世纪70年代,由于社会对环境的重视,加上土地资源的限制、石油等状况,人们开始从增建道路满足需求转向以提高道路效率为主。为了实现缓解交通拥堵,畅通交通,提高道路的通行效率,交通控制信号系统是必不可少的手段。因为,城市是否畅通在很大程度上受到这条道路上的每一个交叉口的制约。当交叉口的流量到达一定数值时候,就必须对该路口采取相应的措施。而交通信号控制系统可以把冲突的交通流在时间与空间上适当分离,以保证交叉口范围的交通安全和充分发挥现有道路在交叉口的通行能力。 一.国外交通系统 1.TRANSYT交通信号控制系统 TRANSYT系统是一种脱机配时优化的定时控制系统,全称是(Traffic Network Study Tool)“交通网络研究工具”,这一方法最初是由英国道路交通研究所的D-I罗伯逊先生于1966年提出的。经过十几年的实践,罗伯逊领导的研究小组对TRANSYT方法不断改进,到1980年,TRANSYT8公之于世。TRANSYT是目前世界各国流传最广、普遍应用的一种协调配时方法。除TRANSYT之外,还有其他一些广泛应用的版本如TRANSYT7、TRANSYT-GN 等,这些都是由TRANSYT的某一版本经过修改而派生出来的。它用来确定城市交通运行指标最小的信号网络的最佳绿信比和相位差。各国的工程师、专家们对这系统都有不同研究与发展,其中美国有TRANSYT-7F,法国将TRANSYT改为THESEE和THEBES型。TRANSYT是最成功的静态系统,己被世界上400多个城市所采用,产生了显著的社会经济效益。但其缺点也很明显:计算量大,在大城市中这一问题尤为突出;不对周期进行优化,故很难获得整体最优配时方案;它是离线优化,需要大量的路网几何、交通流数据,需要花费大量的人力、物力、财力。 2.SCOOT系统 SCOOT(Split-Cycle-Offset Optimization Technique)即“绿信比-信号周期-相位差优化技术”,SCOOT是由英国道路研究所在TRANSYT系统的基础上采用自适应控制方法于1980年提出的动态交通控制系统. SCOO T的模型与优化原理与TRANS YT相仿,不同的是SCOO T为方案生成的控制系统,是通过安装在交叉口每条进口车道最上游的车辆检测器所采集的车辆信息,进行联机处理,从而形成控制方案,并能连续实时调整周期、绿信比和相位差来适应不同的交通流。概括来讲,SCOOT系统具有5个特点: 1)实用性强,几乎不受城市交通出行方式、出行起讫点分布、土地使用情况、季节性和临时性交通变化以及天气和气候变化的影响。 2)对配时参数的优化是采用连续微量调整的方式,稳定性强。 3)个别交通车辆检测器错误的反馈信息几乎不影响SCOOT系统对配时方案参数的优化,而且该系统对这类错误的信息有自动鉴别和淘汰效用。 4)对路网上各交叉口信号配时方案的检验和调整,每秒钟都在进行,所以能对路网上交通状况的任何一种变化趋势做出迅速的反应。 5) SCOOT系统能提供各种反映路网交通状况的信息,为制定综合管理决策创造了有利的条件。 目前我国使用SCOOT系统的主要有:北京、大连、成都、青岛、绵阳等地。 SCOOT系统的不足是:相位不能自动增减,任何路口只能有固定的相序;独立的控制子区的划分不能自动完成,只能人工完成;安装调试困难,对用29户的技术要求过高。 3.SCATS系统 SCATS 系统是澳大利亚新南威尔士州道路交通局(RTA)为在悉尼市实施信号控制,于70 年代开发成功的系统。之后,它的高效性和对道路环境的广泛适应性,逐渐被其它澳大利亚和新西兰的城市及大量海外城市所认同,到目前为止,世界上已有70 多个城市安装了SCATS 交通管理系统,其中包括美国、爱尔兰、墨西哥、斐济、以色列以及大部分东南亚国家,系统本身也逐渐发展成为一个完整的交通管理系统,并且能够与其它智能交通系统完美地集成在一起,以发挥系统的整体效益,为现代交通管理服务。SCATS 系统无论是在控制技术还是在智能交通应用方面,都处于交通科技的最前沿,是世界领先的交通管理系统。
Agilent Technologies 35670A Dynamic Signal Analyzer Product Overview The Agilent 35670A is a portable two- or four-channel dynamic signal analyzer with the versatility to be several instruments at once. Rugged and portable, it’s ideal for field work. Yet it has the performance and functionality required for demanding R&D applications. Optional features optimize the instrument for troubleshooting mechanical vibration and noise problems, characterizing control systems, or general spectrum and network analysis. Take the Agilent 35670A where it’s needed! Whether you’re moving an instrument around the world or around the lab, portability is a real benefit. Small enough to fit under an airplane seat, the 35670A goes where it’s needed. But there’s more to portability than size. Like a nominal 12- to 28-Volt DC power input and self-contained features that do not require external hardware, such as built-in piezoelectric integrated circuit power supply, analog trigger and tachometer inputs, and optional computed order tracking. Versatile enough to be your only instrument for low frequency analysis With the 35670A, you carry several instruments into the field in one package. Frequency, time, and amplitude domain analysis are all available in the standard instrument. Build on that capability with options that either add new measurement capability or enhance all measurement modes. Versatile two- or four-channel high-performance FFT-based spectrum/network analyzer 122 μHz to 102.4 kHz 16-bit ADC Key Specifications Frequency Range:102.4 kHz 1 channel 51.2 kHz 2 channel 25.6 kHz 4 channel Dynamic Range:90 dB typical Accuracy:±0.15 dB Channel Match:±0.04 dB and ±0.5 degrees Real-time Bandwidth: 25.6 kHz/1 channel Resolution:100, 200, 400 & 800 lines Time Capture:0.8 to >6 Msamples (option UFC) Source Types:Random, Burst random, Periodic chirp, Burst chirp, Pink noise, Sine, Swept-Sine (option1D2), Arbitrary (option 1D4) The Agilent 35670A shown with four channels (option AY6) AY6Add Two Channels (Four Total) 1D0Computed Order Tracking 1D1Real-Time Octave Measurements UK4Microphone Adapter and Power Supply 1D2Swept-Sine Measurements 1D3Curve Fit and Synthesis 1D4Arbitrary Waveform Source 1C2Agilent Instrument BASIC 1001D0 - 1D4 bundle
课程名称:机械动力学与动态特性分析 任课老师:蒙艳玫 学院:机械工程学院 专业:机械制造及其自动化 姓名:韦荣发 学号: 1211301011
1、用机械网络分析一下系统的简化模型: 碎石机(用双重动力减震器) 画出上述系统的机械网络图,设计和分析减振效果 解:(1)由上图可得其机械网络图,如图1-1所示。 图1-1 (2)设计与分析 由图1-1机械网络图可知,整个系统会因偏心质量而发生振动,已知偏心质量m ,偏心距为e ,因此,激振力为: 由以上条件,根据基尔霍夫 节点定律列出位移响应方程: pcos wt (1)
导纳阵为: 所以,若要消除m2、K2系统的振动,即在m2点激振时,其位移响应等于零, 则其自导纳H22=0,所以,。所以: 即,,此频率就是反共振频率,当激振力的频率等于该频率时,m2 和m3的位移等于零.因此在设计减振器时,只要合理的选择减振器的质量、刚度,使它在单独振动时的固有频率等于激振力的频率,就能够消碎石机的振动。 2、结合实际研究课题,以一实际结构或机器为对象, (1)作FRFS测试分析,试述: 1)目的 结合甘蔗实地种植情况和蔗地地形, 利用ADAMS View建立一个轮式小型甘蔗收割机的样机模型, 对其行走转向性能进行仿真分析, 并在平路面基础上建立了田间常见障碍物模型,进一步对收割机越障性能进行仿真研究; 通过虚拟仿真和物理试验相结合的方法,分析比较了不同轴承及间距对刀轴刚性及甘蔗断面切割质盆的影响,并在此基础上提出了一种高刚性的轴承布局方法,为设计低破头率的小型甘蔗联合收获机切割器提供了依据. 2)方法、原理 ①选用多体动力学仿真软件ADAMS View作为仿真分析的软件平台 ②将切割器的结构在Pro/E软件中建立三维实体模型,然后将模型导入到ANSYS软件中,将轴承利用弹性单元进行模拟 3)实验装置,过程 选用多体动力学仿真软件ADAMS View作为仿真分析的软件平台, 对轮胎、悬架转向盘和地面进行。简化建模。模型中所用到的是全局坐标系: 坐标原点在两前轮中心连线中点, 收割机前进方向为X轴负向, 垂直水平面向上为Y轴正向, Z轴正向由右手定则确定, 其质量和转动惯量与实际底盘相同。根据甘蔗种植情
城市道路交通信号控制方式适用规范 1 范围 本标准规定了不同信号控制方式的适用基本原则、多相位控制方式设计原则以及采用不同控制方式的技术-经济评价方法。 本标准适用于城市道路交通信号控制方式的设计和建设。 2规范性引用文件 下列文件中的条款通过本标准的引用而成为本标准的条款。凡是注日期的引用文件,其随后所有的修改单(不包括勘误的内容)或修订版均不适用于本标准,然而,鼓励根据本标准达成协议的各方研究是否可使用这些文件的最新版本。凡是不注日期的引用文件,其最新版本适用于本标准。 GA/T 509-2004 城市交通信号控制系统术语 3术语和定义 GA/T 509-2004中确立的术语和定义适用于本标准。 4单点多时段定时控制方式、单点感应控制方式、线协调控制方式、区域协调控制方式适用基本原则 单点多时段定时控制方式、单点感应控制方式、线协调控制方式、区域协调控制方式均应根据交通需求和道路条件选定,并需进行技术-经济评价。 在选用某种控制方式时,宜采用计算机仿真技术进行分析比较和配时方案的优化。4.1 单点多时段定时控制方式适用原则
单点多时段定时控制方式是最基本、最经济的控制方式。 当交通状况符合总体流量稳定、变化比较规律的条件时,可选用此种控制方式。 4.2单点感应控制方式适用原则 4.2.1当单点控制的交叉口交通状况变化比较频繁且没有规律时,宜采用单点感应控制。4.2.2单点感应控制一般在交叉口进口车道设置检测器或在人行横道线前设置行人按钮,信号配时参数可随检测到的信息而改变。 4.2.3单点感应控制分为半感应控制和全感应控制。 在支路流量比较小的信号控制交叉口或路段的人行横道处,可采用半感应控制。在支路上设置检测器或在人行横道处设置行人按钮,根据是否有交通需求而确定是否运行该相位,并根据交通需求情况确定相应相位时间。 在各进口流量相近,且变化较为频繁的信号控制交叉口宜采用全感应控制方式。若单个路口信号机有能力根据检测的实时交通状况进行配时优化,也可实现单点优化控制。 4.3线协调控制方式适用原则 4.3.1 当需要在单点控制的基础上扩大控制范围,对若干连续交叉口形成的线路上进行协调控制以提高整体通行效率时,可采用线协调控制方式。 4.3.2采用此种控制方式时,针对若干连续交叉口设计一种相互协调的配时方案,通过时钟同步,各交叉口的信号机按预设方案协调运行。 4.3.3线协调控制方式应考虑相邻交叉口的距离。通常若路口间距离大于800 m以上时,会降低路口间的协调效果。