
Matlab牛头刨床参数分析 >> %Matlab源程序 w1=1;l1=0.125;l3=0.6;l6=0.275;l61=0.575;l4=0.15; for m=1:3601 o1(m)=pi*(m-1)/1800;o31(m)=atan((l6+l1*sin(o1(m)))/(l1*cos(o1(m)))); if o31(m)>=0 o3(m)=o31(m); else o3(m)=pi+o31(m); end; s3(m)=(l1*cos(o1(m)))/cos(o3(m)); o4(m)=pi-asin((l61-l3*sin(o3(m)))/l4); se(m)=l3*cos(o3(m))+l4*cos(o4(m)); if o1(m)==pi/2 o3(m)=pi/2; s3(m)=l1+l6; end if o1(m)==3*pi/2 o3(m)=pi/2; s3(m)=l6-l1; end A1=[cos(o3(m)),-s3(m)*sin(o3(m)),0,0;sin(o3(m)),s3(m)*cos(o3(m)),0,0;0,-l3*sin(o3(m)),-l4*sin (o4(m)),-1;0,l3*cos(o3(m)),l4*cos(o4(m)),0]; B1=w1*[-l1*sin(o1(m));l1*cos(o1(m));0;0];D1=A1\B1;E1(:,m)=D1;ds(m)=D1(1);w3(m)=D1(2); w4(m)=D1(3);ve(m)=D1(4); A2=[cos(o3(m)),-s3(m)*sin(o3(m)),0,0;sin(o3(m)),s3(m)*cos(o3(m)),0,0;0,-l3*sin(o3(m)),-l4*sin (o4(m)),-1;0,l3*cos(o3(m)),l4*cos(o4(m)),0]; B2=-[-w3(m)*sin(o3(m)),(-ds(m)*sin(o3(m))-s3(m)*w3(m)*cos(o3(m))),0,0;w3(m)*cos(o3(m)),( ds(m)*cos(o3(m))-s3(m)*w3(m)*sin(o3(m))),0,0;0,-l3*w3(m)*cos(o3(m)),-l4*w4(m)*cos(o4(m)) ,0;0,-l3*w3(m)*sin(o3(m)),-l4*w4(m)*sin(o4(m)),0]*[ds(m);w3(m);w4(m);ve(m)]; C2=w1*[-l1*w1*cos(o1(m));-l1*w1*sin(o1(m));0;0];B=B2+C2;D2=A2\B;E2(:,m)=D2;dds(m)=D 2(1);a3(m)=D2(2);a4(m)=D2(3);ae(m)=D2(4); end; o11=o1*180/pi;y=[o3*180/pi;o4*180/pi];w=[w3;w4];a=[a3;a4];figure; subplot(221);h1=plotyy(o11,y,o11, se); axis auto ; grid minor; title('各机构位置曲线图'); xlabel('\it\theta1');ylabel('\it\theta3,\theta4,Se'); text(315,215,'SE'); text(180,180,'θ4'); text(70,105,'θ3'); subplot(222);h2=plotyy(o11,w,o11,ve ); grid minor;
摘要 在工程技术领域,经常会遇到一些需要反复操作,重复性很高的工作,如果能有一个供反复操作且操作简单的专用工具,图形用户界面就是最好的选择。如在本设计中对于牛头刨床平面六杆机构来说,为了保证结构参数与运动参数不同的牛头刨床的运动特性,即刨刀在切削过程中接近于等速运动从而保证加工质量和延长刀具寿命,以及刀具的急回性能从而提高生产率,这样的问题如果能够通过设计一个模型平台,之后只需改变参量就可以解决预期的问题,这将大大的提高设计效率。本设计中正是通过建立牛头刨床六杆机构的数学模型,然后用MA TLAB程序设计出一个友好的人机交互的图形界面,并将数学模型参数化,使用户只需改变牛头刨床的参数就可以方便的实现运动分析和运动仿真,用户可以形象直观地观察到牛头刨床的运动轨迹、速度变化及加速度变化规律。 关键词:牛头刨床六杆机构MA TLAB 运动仿真程序开发
Abstract In the engineering area, often repeatedly encountered some operational needs, repetitive highly, and if the operation can be repeated for a simple operation and dedicated tool graphical user interface is the best choice. As in the planer graphic design for six pole bodies, and campaigns to ensure the structural parameters of different parameters planer movement characteristics, planning tool in the process of cutting close to equal campaign to ensure processing quality and extended life cutlery and cutlery rush back to the performance enhancing productivity, If such issues can be adopted to design a model platform parameter can be changed only after the expected settlement, which will greatly enhance the efficiency of the design. It is through the establishment of this design planer six pole bodies mathematical model, and then use MATLAB to devise procedures of a friendly aircraft in the world graphics interface, and mathematical models of the parameters, so that users only need to change the parameters planer can facilitate the realization of movement analysis and sports simulation, Users can visual image observed in planer movement trajectories, speed changes and acceleration changes. Keywords:Planer 6 pole bodies MATLAB Campaign simulation Procedure development.
高等机构学 题目: 牛头刨床机构运动分析 院系名称:机械与动力学院 专业班级:机械工程 学生姓名:学号: 学生姓名:学号: 学生姓名:学号: 指导教师: 2015年12 月17日
目录 一问题描述................................................................................................................................ - 1 -二运动分析................................................................................................................................ - 1 - 2.1矢量法构建机构独立位置方程 ............................................................................. - 1 - 2.2机构速度分析 ............................................................................................................. - 2 - 2.3机构加速度分析......................................................................................................... - 2 - 2.4机构运动线图绘制.................................................................................................... - 3 -三总结......................................................................................................................................... - 4 -附录一:Matlab程序............................................................................................................... - 4 -
机械原理大作业 ——10A 班级:姓名:学号: 位置方程 利用两个封闭图形ABDEA 和EDCGE ,建立两个封闭矢量方程,由此可得: ? ??+=++=+' s l l s l l l l 56431 643(1)
把(1)式分别向x 轴、y 轴投影得: ??? ? ? ??=+=++=++=+ h l l s l l l h s l l h s l 334 45 334411133441 123344sin sin cos cos sin sin sin cos cos cos θθθθθθθθθθ(2) 在(2)式中包含3s 、5s 、3θ、4θ四个未知数,消去其中三个可得到只含4θ一个未知数 方程: [][]{}[ ] [] sin sin sin 2sin cos cos sin sin 2 441112 3 442 4 2242 441122 44111 =-+--+-++-+θθθθθθθθl l h l hl h l l l h l l h (3) 当1θ取不同值时,用牛顿迭代法解(3)式,可以求出每个4θ的值,再根据方程组(2)可以求出其他杆件的位置参数3s 、5s 、3θ的值: ? ?? ? ???-+=+=-= 3 4 41113334453 4 43sin sin sin cos cos )sin arcsin( θθθθθθθl l h s l l s l l h (4) 速度方程 对(2)式对时间求一次导数并把结果写成矩阵的形式得: ????????????-=????????????? ???????? ??? ? ?-----00cos sin 0 cos cos 01sin sin 00cos cos sin 0sin sin cos 11 111 434 43344334 43334 4333θθωωωθθθθθθθθθθl l v v l l l l l s l s C e B (5) 其中C v 为刨刀的水平速度,v e B 为滑块2相对于杆3的速度。由于每个1θ对应的3s 、3θ、 4θ已求出,方程组式(5)的系数矩阵均为常数,采用按列选主元的高斯消去法可求解(式 5)可解得角速度ω3、ω4、e B v 、 C v 加速度方程 把(5)对时间求导得矩阵式:
附录 牛头刨床主运动机构MATLAB程序由主程序six」six_bar 两部分组成。 1.主程序six_bar_main文件 %1.输入已知数据clear; 11=0.125; 13=0.600; 14=0.150; 16=0.275; 161=0.575; omega1=1; alpha 仁0; hd=pi/180; du=180/pi; %2.调用子函数six_bar计算牛头刨床机构位移,角速度, for n1=1:459; theta1( n1)=-2*pi+5.8199+( n1-1)*hd; _main 和子函数角加速度
II=[I1,I3,I4,I6,I61]; [theta,omega,alpha]=six_bar(theta1( n1),omega1,alpha1,ll); s3( n1)=theta(1); theta3( n1)=theta(2); theta4( n1)=theta(3); sE( n1)=theta(4); v2( n1)=omega(1); omega3( n1)=omega(2); omega4 (n 1)=omega(3); vE( n1)=omega(4); a2( n1)=alpha(1); alpha3( n1)=alpha(2); alpha4( n1)=alpha(3); aE( n1)=alpha(4); end %3.位移、角速度、角加速度、和牛头刨床图形输出 figure?); n1=1:459; t=( n1-1)*2*pi/360; subplot(2,2,1); %绘角位移及位移线图 plot(t,theta3*du,'r-.'); grid on;
机械原理课程设计 计算说明书 课题名称:牛头刨床刨刀的往复运动机构 姓名: 院别:工学院 学号: 专业:机械设计制造及其自动化 班级:机设1201 指导教师: 2014年6月7日
工学院课程设计评审表
目录 一.设计任务书 (4) 1.1 设计题目 (4) 1.2 牛头刨床简介 (4) 1.3 牛头刨床工作原理 (4) 1.4 设计要求及设计参数 (6) 1.5 设计任务 (7) 二.导杆机构的设计及运动分析 (8) 2.1 机构运动简图 (8) 2.2 机构运动速度多边形 (9) 2.3 机构运动加速度多边形 (11) 三.导杆机构动态静力分析 (14) 3.1 静态图 (14) 3.2 惯性力及惯性力偶矩 (14) 3.3 杆组拆分及用力多边形和力矩平衡求各运动反力和曲柄平衡力 (15) 心得与体会 (21) 参考文献 (22)
一、设计任务书 1.1 设计题目:牛头刨床刨刀的往复运动机构 1.2 牛头刨床简介: 牛头刨 床是用于加工中小尺寸的平面或直槽的金属切削机床,多用于单件或小批量生 产。 为了 适用不同材料和不同尺寸工件的粗、精加工,要求主执行构件—刨刀能以数种不同速度、不同行程和不同起始位置作水平往复直线移动,且切削时刨刀的移动速度低于空行程速度,即刨刀具有急回现象。刨刀可随小刀架作不同进给量的垂直进给;安装工件的工作台应具有不同进给量的横向进给,以完成平面的加工,工作台还应具有升降功能,以适应不同高度的工件加工。 1.3 牛头刨床工作原理: 牛头刨床是一种刨削式加工平面的机床,图1所示为较常见的一种机械运动的牛头刨床。电动机经皮带传动和两对齿轮传动, 带动曲 牛头刨床外形图
牛头刨床机构运动分析 程序编写: #include
高等机构学 题目:牛头刨床机构运动分析 院系名称:机械与动力学院 专业班级:机械工程 学生姓名:学号: 学生姓名:学号: 学生姓名:学号: 指导教师: 2015年12月17日
目录 一问题描述........................................................ - 1 -二运动分析........................................................ - 1 - 2.1矢量法构建机构独立位置方程................................ - 1 - 2.2机构速度分析.............................................. - 2 - 2.3机构加速度分析............................................ - 2 - 2.4机构运动线图绘制.......................................... - 2 -三总结............................................................ - 4 -附录一:Matlab程序............................................... - 4 -
牛头刨床机构运动分析 一 问题描述 如图1-1所示的牛头刨床机构中,800h mm =,1360h mm =,2120h mm =, 200AB l mm =,960CD l mm =,160DE l mm =。设曲柄以等角速度15/rad s ω=逆时针方向 回转,试对其进行运动分析,求出该机构中各从动件的方位角、角速度和角加速度以及各机构的运动线图。 图1-1 牛头刨床机构 二 运动分析 2.1矢量法构建机构独立位置方程 如图2-1所示,以E 为坐标原点建立直角坐标系,并标出各杆矢量及其方位角。其中共有四个未知量334,,,c S S θθ。 图2-1 坐标系建立
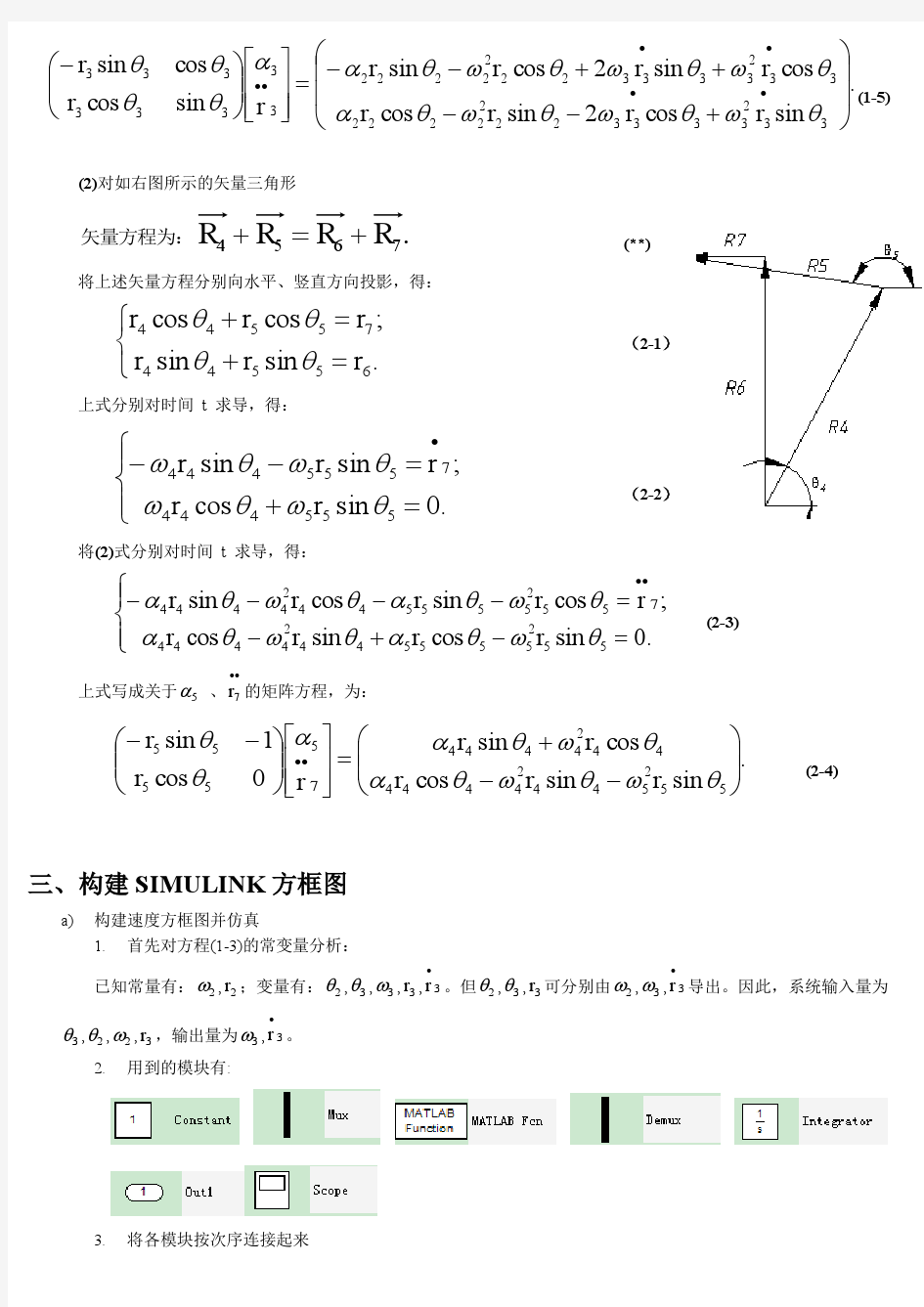
例: 如图所示为一牛头刨床的机构运动简图。设已知各构件尺寸为:1125mm l =, 3600mm l =,4150mm l =,原动件1的方位角1=0~360θ??和等角速度1=1rad/s w 。试用 矩阵法求该机构中各从动件的方位角、角速度和角加速度以及E 点的位移、速度和家速度的运动线图。 解:先建立一直角坐标系,并标出各杆矢量及方位角。其中共有四个未知量3θ、4θ、3s 及 E s 。为求解需建立两个封闭矢量方程,为此需利用两个封闭图形ABCA 及CDEGC ,由此 可得, 613346,'E l l s l l l s +=+=+ (1-1) 写成投影方程为: 3311 33611334433446cos cos sin sin cos cos 0sin sin ' E s l s l l l l s l l l θθθθθθθθ==++-=+= (1-2) 解上面方程组,即可求得3θ、4θ、3s 及E s 四个位置参数,其中23θθ=。 将上列各式对时间取一次、二次导数,并写成矩阵形式,即可得以下速度和加速度方程式。 速度方程式:3331133331131334443344cos sin 00sin sin cos 00cos 0sin sin 1000cos cos 0E s l s s l w w l l w l l v θθθθθθθθθθ??--????????????????=??????---?????? ???????? g (1-3)
机构从动件的位置参数矩阵:333 33333443344cos sin 00sin cos 000sin sin 10cos cos 0s s l l l l θθθθθθθθ-????????---???? 机构从动件的的速度列阵:334E s w w v ?????? ???????? g 机构原动件的位置参数矩阵:1111sin cos 00l l θθ-???????????? 1w :机构原动件的角速度 加速度方程式: 333 333333344433443333333 3333333 33344433344cos sin 00sin cos 000sin sin 10cos cos 0sin sin cos 00cos cos sin 000cos cos 00 sin sin E s s s l l l l w s s w w s s w l w l w l w l w θθθθαθθαθθαθθθθθθθθθθ??-???????????? ??---?? ???????? ----=-----g g g g 11131113144cos sin 000E l w s l w w w w v θθ? ???-????????? ?-????+????????????? ??????? ????g (1-4) 机构从动件的位置参数矩阵求导:3333333 33 33333333444333444sin sin cos 00cos cos sin 000cos cos 00sin sin 0w s s w w s s w l w l w l w l w θθθθθθθθθθ? ? ---??? ?-????--? ?--???? g g 机构从动件的的加速度列阵:334E s ααα?? ???? ???????? g g
齐齐哈尔大学普通高等教育机械原理课程设计 题目题号:牛头刨床 学院:机电工程学院 专业班级:机电131班 学生姓名:迟涵威 指导教师:包丽 2015年6月21日
齐齐哈尔大学 机械电子工程专业 机械原理课程设计任务书一.设计题目:牛头刨床 给定数据及要求
二.应完成的工作 1画出机构的运动简图,并作机构两个位置的速度、加速度多边形。 2设计说明书一份。
目录 摘要 (4) 一、设计任务......................................................................................................5. 二、工作原理及工艺动作过程 (5) 三、导杆机构的运动分析 (7) 1、设计数据 (7) 2、机构运动简图 (7) 3、速度分析 (9) 4、加速度分析 (10) 5、动态静力分析 (15) 总结 (19) 参考文献 (20)
摘要 牛头刨床是一种用于平面切削加工的机床,本次课程设计的主要内容是牛头刨床导杆机构的运动分析和动态静力的分析以及对不同设计方案的施行自行设计。每组各自选择一个相互不同的位置,独立绘制运动简图,进行速度、位移以及机构受力分析,绘制相关运动曲线图,最后将上述各项内容绘制在图纸上,并完成课程设计说明书。 本次《机械原理》课程设计的主要特点是具有较高的工作独立性内容联系性,和能够通过此次课程设计将相关课程中的相关知识融会贯通,进一步加深学生所学的理论知识,培养学生的独立解决有关课程实际问题的能力,使学生对于机械运动学和动力学的分析和设计有一个比较完整的概念。
青岛工学院 毕业设计 开题报告 题目基于Pro/E的牛头刨床机构的运动仿真系、中心机电工程系 专业年级09级机械设计制造及其自动化 姓名刘玉伟 学号200904105112 指导教师张丽 2012年10月16日
二、文献综述 国内外研究现状、发展动态;查阅的主要文献 1.国内外研究现状、发展动态 牛头刨床主要用于单件小批生产中刨削中小型工件上的平面、成形面和沟槽。滑枕带着刨刀,作直线住复运动的刨床,因滑枕前端的刀架形似牛头而得名。中小型牛头刨床的主运动大多采用曲柄摇杆机构(见曲柄滑块机构)传动,故滑枕的移动速度是不均匀的。大型牛头刨床多采用液压传动,滑枕基本上是匀速运动。滑枕的返回行程速度大于工作行程速度。由于采用单刃刨刀加工,且在滑枕回程时不切削,牛头刨床的生产率较低。机床的主参数是最大刨削长度。牛头刨床主要有普通牛头刨床、仿形牛头刨床和移动式牛头刨床等。普通牛头刨床(见图)由滑枕带着刨刀作水平直线住复运动,刀架可在垂直面内回转一个角度,并可手动进给,工作台带着工件作间歇的横向或垂直进给运动,常用于加工平面、沟槽和燕尾面等。仿形牛头刨床是在普通牛头刨床上增加一仿形机构,用于加工成形表面,如透平叶片。移动式牛头刨床的滑枕与滑座还能在床身(卧式)或立柱(立式)上移动,适用于刨削特大型工件的局部平面。 牛头刨床主要用于单件小批生产中刨削中小型工件上的平面、成形面和沟槽。它的主要五大特点有: 1、牛头刨床的工作台能左右回转角度,工作台具有横向和升降的快速移动机构;用以刨削倾斜的平面,从而扩大了使用范围。 2、刨床的进给系统采用凸轮机构,有10级进给量。改变走刀量,也非常方便。 3、牛头刨床在走刀系统内装有过载安全机构,当由于操作不慎或者受到外力影响与切削超载时,走刀自行打滑,无损机件保证机床的正常运行。 4、滑枕和床身导轨间以及具有速度的齿轮付和主要的滑动导轨面,均有油泵打出的润滑油进行循润滑。 5、牛头刨床装有离合器及制动停车机构,所以在变换速度,启动机床及停
牛头刨床的连杆机构运动分析 0 前言 机构运动分析的任务是对于结构型式及尺寸参数已定的具体机构,按主动件的位置、速度和加速度来确定从动件或从动件上指定点的位置、速度和加速度。许多机械的运动学特性和运动参数直接关系到机械工艺动作的质量,运动参数又是机械动力学分析的依据,所以机构的运动分析是机械设计过程中必不可少的重要环节。以计算机为手段的解析方法,由于解算速度快,精确度高,程序有一定的通用性,已成为机构运动分析的主要方法。 连杆机构作为在机械制造特别是在加工机械制造中主要用作传动的机构型式,同其他型式机构特别是凸轮机构相比具有很多优点。连杆机构采用低副连接,结构简单,易于加工、安装并能保证精度要求。连杆机构可以将主动件的运动通过连杆传递到与执行机构或辅助机构直接或间接相连的从动件,实现间歇运动,满足给定的运动要求,完成机器的工艺操作。 牛头刨床是一种利用工作台的横向运动和纵向往复运动来去除材料的一种切削加工机床。工作台的纵向往复运动是机床的主运动,实现工件的切削。工作台的横向运动即是进给运动,实现对切削精度的控制。本文中只分析纵向运动的运动特性。牛头刨床有很多机构组成,其中实现刨头切削运动的六连杆机构是一个关键机构。刨床工作时,通过六杆机构驱动刨刀作往复移动。刨刀右行时,当刨刀处于工作行程时;要求刨刀的速度较低且平稳,以减小原动机的容量和提高切削质量。当刨刀处于返回行程时,刨刀不工作,称为空行程,此时要求刨刀的速度较高以提高生产率。由此可见,牛头刨床的纵向运动特性对机床的性能有决定性的影响。 1 牛头刨床的六连杆机构 牛头刨床有很多机构组成,其中实现刨头切削运动的六杆机构是一个关键机构。图1所示的为一牛头刨床的六连杆机构。杆1为原动件,刨刀装在C点上。假设已知各构件的尺寸如表1所示,原动件1以等角速度ω1=1rad/s沿着逆时针方向回转,要求分析各从动件的角位移、角速度和角加速度以及刨刀C点的位移、速度和加速度的变化情况。
牛头刨床刨刀的往复运 动机构 Company number:【0089WT-8898YT-W8CCB-BUUT-202108】
机械原理课程设计 计算说明书 课题名称:牛头刨床刨刀的往复运动机构 姓名: 院别:工学院 学号: 专业:机械设计制造及其自动化 班级:机设1201 指导教师: 2014年6月7日 工学院课程设计评审表
目录 一.设计任务书 (4) 设计题目 (4) 牛头刨床简介 (4) 牛头刨床工作原理 (4) 设计要求及设计参数 (6) 设计任务 (7) 二.导杆机构的设计及运动分析 (8) 机构运动简图 (8) 机构运动速度多边形 (9)
机构运动加速度多边形 (11) 三.导杆机构动态静力分析 (14) 静态图 (14) 惯性力及惯性力偶矩 (14) 杆组拆分及用力多边形和力矩平衡求各运动反力和曲柄平衡力 (15) 心得与体会 (21) 参考文献 (22) 一、设计任务书 设计题目:牛头刨床刨刀的往复运动机构 牛头刨床简介: 牛头刨床是用 牛头刨床外形图 于加工中小尺寸的 平面或直槽的金属 切削机床,多用于 单件或小批量生 产。 为了适用不同 材料和不同尺寸工 件的粗、精加工, 要求主执行构件—刨刀能以数种不同速度、不同行程和不同起始位置作水平往复直线移动,且切削时刨刀的移动速度低于空行程速度,即刨刀具有急回现象。刨刀可随小刀架作不同进给量的垂直进给;安装工件的工作台应具有不同进给量
的横向进给,以完成平面的加工,工作台还应具有升降功能,以适应不同高度的工件加工。 牛头刨床工作原理: 牛头刨床是一种刨削式加工平面的机床,图1所示为较常见的一种机械运动的牛头刨床。电动机经皮带传动和两对齿轮传动,带动曲柄2和曲柄相固结的凸轮转动,由曲柄2驱动导杆2-3-4-5-6,最后带动刨头和刨刀作往复运动。当刨头右行时,刨刀进行切削,称为工作行程。当刨头左行时,刨刀不切削,称为空回行程。当刨头在工作行程时,为减少电动机容量和提高切削质量,要求刨削速度较低,且接近于匀速切削。在空回行程中,为节约时间和提高生产效率,采用了具有急回运动特性的导杆机构。此外,当刨刀每完成一次刨削后,要求刨床能利用空回行程的时间,使工作台连同工件作一次进给运动,以便于刨刀下一次切削。为此,该刨床采用凸轮机构,双摇杆机构经棘轮机构和螺旋机构(图中未示出),带动工作台作横向进给运动。
牛头刨床主运动机构MATLAB!序由主程序six_bar_main和子函数six_bar两部分组成。 1.主程序six_bar_main 文件 %1.输入已知数据 clear; l1=; l3=; l4=; l6=; l61=; omega1=1; alpha1=0; hd=pi/180; du=180/pi; %2.调用子函数six_bar 计算牛头刨床机构位移,角速度,角加速度 for n1=1:459; theta1(n1)=-2*pi++(n1-1)*hd; ll=[l1,l3,l4,l6,l61]; [theta,omega,alpha]=six_bar(theta1(n1),omega1,alpha1,ll); s3(n1)=theta(1); theta3(n1)=theta(2); theta4(n1)=theta(3); sE(n1)=theta(4); v2(n1)=omega(1); omega3(n1)=omega(2); omega4(n1)=omega(3); vE(n1)=omega(4); a2(n1)=alpha(1); alpha3(n1)=alpha(2); alpha4(n1)=alpha(3); aE(n1)=alpha(4); end
%3.位移、角速度、角加速度、和牛头刨床图形输出figure(3); n1=1:459; t=(n1-1)*2*pi/360; subplot(2,2,1); % 绘角位移及位移线图plot(t,theta3*du,'r-.'); grid on; hold on; axis auto; [haxes,hline1,hline2]=plotyy(t,theta4*du,t,sE); grid on; hold on; xlabel(' 时间/s') axes(haxes(1)); ylabel(' 角位移/\circ') axes(haxes(2)); ylabel(' 位移/m') hold on; grid on; text,,'\theta_3') text,,'\theta_4') text,,'s_E') subplot(2,2,2); % 绘角速度及速度线图plot(t,omega3,'r-.'); grid on; hold on; axis auto; [haxes,hline1,hline2]=plotyy(t,omega4,t,vE); grid on; hold on; xlabel(' 时间/s') axes(haxes(1)); ylabel('角速度/rad\cdots A{-1}') axes(haxes(2)); ylabel(' 速度/m\cdotsA{-1}') hold on; grid on; text,,'\omega_3') text,,'\omega_4') text,,'v_E') subplot(2,2,3); % 绘角加速度及加速度线图plot(t,alpha3,'r-.'); grid on; hold on; axis auto; [haxes,hline1,hline2]=plotyy(t,alpha4,t,aE); grid on; hold on; xlabel(' 时间/s') axes(haxes(1)); ylabel('角加速度/rad\cdots A{-2}') axes(haxes(2)); ylabel(' 加速度/m\cdotsA{-2}') hold on; grid on; text,,'\alpha_3') text,,'\alpha_4') text,,'a_E') subplot(2,2,4); % 牛头刨床机构n1=20; x(1)=0; y(1)=0;
江苏师范大学机电工程学院 课程设计说明书 题目:牛头刨床机构设计及运动分析 系别 专业班级 学生姓名 学号 指导教师 2014年1月8日 目录 一、概述
1.1、课程设计的目的——————————————— 2 1.2、工作原理—————————————————— 2 1.3、设计要求—————————————————— 3 1.4、设计数据—————————————————— 4 1.5、创新设计内容及工作量———————————— 4 二、牛头刨床主传动机构的结构设计与分析 2.1、方案分析—————————————————— 5 2.2、主传动机构尺寸的综合与确定————————— 5 2.2、杆组拆分—————————————————— 6 2.4、绘制刀头位移曲线图————————————— 7 三、牛头刨床主传动机构的运动分析及程序 3.1、解析法进行运动分析————————————— 8 3.2、程序编写过程(计算机C语言程序)—————— 10 3.3、计算数据结果——————————————— 12 3.4、位移、速度和加速度运动曲线图与分析————— 13 四、小结 心得体会——————————————————— 18五、 参考文献 参考文献——————————————————— 19 一、概述 1.1、课程设计的目的
目的: 机械课程创新设计是培养学生机械系统方案设计能力的技术基础课程,他是机制专业课程学习过程中的一个重要实践环节。其目的是以机制专业课程的学习为基础,进一步巩固和加深所学的基本理论、基本概念和基本知识,培养学生分析和解决与本专业课程有关的具体机械所涉及的实际问题的能力,使学生熟悉机械系统设计的步骤及方法,其中包括选型、运动方案的确定、运动学和动力学的分析和整体设计等,并进一步提高计算、分析、计算机辅助设计、绘图以及查阅和使用文献的综合能力。 1.2、工作原理 牛头刨床是一种靠刀具的往复直线运动及工作台的间歇运动来完成工件的平面切削加工的机床。图1为其参考示意图。电动机经过减速传动装置(皮带和齿轮传动)带动执行机构(导杆机构和凸轮机构)完成刨刀的往复运动和间歇移动。刨床工作时,刨头6由曲柄2带动右行,刨刀进行切削,称为工作行程。在切削行程H中,前后各有一段0.05H的空刀距离,工作阻力F为常数;刨刀左行时,即为空回行程,此行程无工作阻力。在刨刀空回行程时,凸轮8通过四杆机构带动棘轮机构,棘轮机构带动螺旋机构使工作台连同工件在垂直纸面方向上做一次进给运动,以便刨刀继续切削。
二、牛头刨床的运动、动力分析 [H,L1]=solve('H=300','L1=(270*H)/(2*550)',' H','L1') H = 300 L1 = 810/11 >> [N1,W1]=solve('N1=23',' W1=(N1*2*PI)/60','N1','W1') N1 = 23
W1 = 23/30*PI 一、任务 根据牛头刨床的机构简图及必要的数据,进行机构的运动学和动力学分析,并给出刨头的位移、速度、加速度和曲柄平衡力矩的曲线。 二、已知条件 1、机构运动简图
2、机构尺寸 mm a 270=, mm b 520=, mm l 5503=, mm l 1004= 3、刨头行程和曲柄转速 行程mm H 420=, 转速min /891r n = 4、刨头的切削阻力 工作行程始终为1000N ,空程为0N 。 三、 表达式推导 如图所示以A 点为坐标原点,平行刨头运动方向为x 轴,建立直角坐标系,标出各杆矢量及方位角。 由机构的结构分析有: 过D 和D '做刨头所在导轨的垂线DG 和D 'G ',从图形中的角度关系易证明GE= G 'E ',所以有EE '=DD '及EE '=θsin 23l =H a l l =1 32,因而我们可以得到3 12l aH l = 1、推导出刨头()1?E E x x =,()1?E E v v =,()1?E E a a =的数学表达式。 (1) 位置分析 由矢量封闭三角形ABC 可得封闭矢量方程为 CB AB l l a =+ 即: 312i i i AB ae l e Se π ?? += (1) 应用欧拉公式θθθsin cos i e i +=,将(1)的虚部和实部分离得: 31sin sin ??S l a AB =+ (2)
北华航天工业学院牛头刨床主体机构的分析 《机械原理》课程设计 班级_______________ 姓名_______________ 序号_______________ 2015年1月
摘要: 文中建立了用解析法作牛头刨床的运动分析,基于机构的位置方程式,将位置方程对时间求一次和二次倒数,得到机构的速度和加速的方程,然后就得到位移、速度、加速度,并通过复数矢量法和矩阵法,并且借助Matlab等软件对牛头刨床进行运动分析,并对牛头刨床的运动学规律进行了仿真,画出牛头刨床的运动动画,使设计的机构更加直白,为该机床的优化设计提供了理论支撑。
目录 摘要 (1) 目录 (2) 1.引言 (3) 2.机构结构分析 (3) 3.机构运动分及程序设计 (3) 4.计算机仿真及结果 (4) 5.图解法验证 (17) 6.guide的制作 (22) 7.参考文献 (30) 8.研究感想 (30)
1.引言: 对牛头刨床进行运动分析的任务是在已知机构尺寸及原动件运动规律的情况下,确定机构中其他构件上某些点的轨迹、位移、速度、加速度和构件的角位移、角速度及角加速度。而这些内容,不论是设计新的机器,还是为了了解现有机械的运动性能,都是十分必要的,而且它还是研究机械动力性能的必要基础和前提。对于牛头刨床来说,其刨刀在有效工作行程中应该接近等速运动,而回程速度却应高于前者速度,从而提高效率。为了确定牛头刨床的设计是否满足要求,就必须对其进行运动分析。本文建立了牛头刨床的力学模型,并推导了其运动微分方程,通过数值方法求得了牛头刨床的运动学规律并开发了一个用于牛头刨床的通用运动学分析程序。 2.机构结构分析: 1.自由度计算: F=3n-2p l -p h F=5*3-7*2=1 2.结构分析: 5个可动构件,5个转动副2个移动副. 3.机构运动分及程序设计 3.1.如图先建立坐标系,已知l1=100mm, l3=500mm,l4=200mm,原动件
东北大学 研究生考试试卷 考试科目:用Matlab的Simulink进行机械仿真 课程编号:y09581015 阅卷人:邹平 考试日期:2012.7.1 姓名:王鑫 学号:1170124 注意事项 1.考前研究生将上述项目填写清楚 2.字迹要清楚,保持卷面清洁 3.交卷时请将本试卷和题签一起上交 东北大学研究生院
基于MATLAB 的牛头刨床传动机构仿真 摘要:根据牛头刨床传动机构的闭环矢量方程推导出各构件的位移、速度、加速度的表达式,并将其转化为适用于MATLAB 仿真的矩阵数学模型,以该矩阵的数学模型编制相应的M 函数仿真模块,最后建立仿真模型,并对仿真结果的相容性误差加以分析。借助于MATLAB 软件可以方便地实现机构性能分析和动态仿真,从而提高设计及分析效率。 关键词:牛头刨床机构;仿真;MATLAB 1.系统仿真模型选取 本文选取机械原理教材[3]中常见的习题牛头刨床传动机构来进行Simulink 仿真。已知75,300,100,150,280AB CD DE AC CF l mm l mm l mm l mm l mm =====,牛头刨床传动机构的示意图如图1所示。 图1 牛头刨床传动机构示意图 牛头刨床传动机构的矢量环如图2所示。其中各个矢量与上图相对应为: 1212345,,,,,,R AB R CB R CD R DE R AC R CF ======其中21R 表示滑块B 在摇杆CD 上的位移,另外相应的初始角度为00011130,60,168θθθ=-==。
图2 传动机构的矢量环 2.系统仿真模型建立 从上图可以看出牛头刨床传动机构中有两个闭环矢量,所以牛头刨床传动机构的闭环矢量方程为: 1421R R R =+ (1) 2356R R R R +=+ (2) 将上述两个矢量方程分别分解到x 和y 坐标轴上,可以分别得到闭环矢量方程(1),(2)的分解表达式。 闭环矢量方程的分解表达式(1): 11212 114212 cos cos sin sin r r r r r θθθθ=?? =+? (3) 闭环矢量方程的分解表达式(2): 22336 22335 cos cos sin sin r r r r r r θθθθ+=?? +=? (4) 分别对上面两个表达式对时间求一阶导数,分别有: 1112122212 1112122212 sin sin cos cos cos sin r r r r r r ωθωθθωθωθθ-=-+?? =+? (5) 2223336 22 2333sin sin cos cos 0r r r r r ωθωθωθωθ--=?? +=? (6)