第一章STEP 7的基础
一、STEP7的安装和授权(略)
二、STEP 7的介绍
使用STEP7软件,可以在一个项目下生成你的S7程序并监视和控制你的
控制对象。在S7程序中通过地址寻址I/O模板。
三、SIMATIC管理器
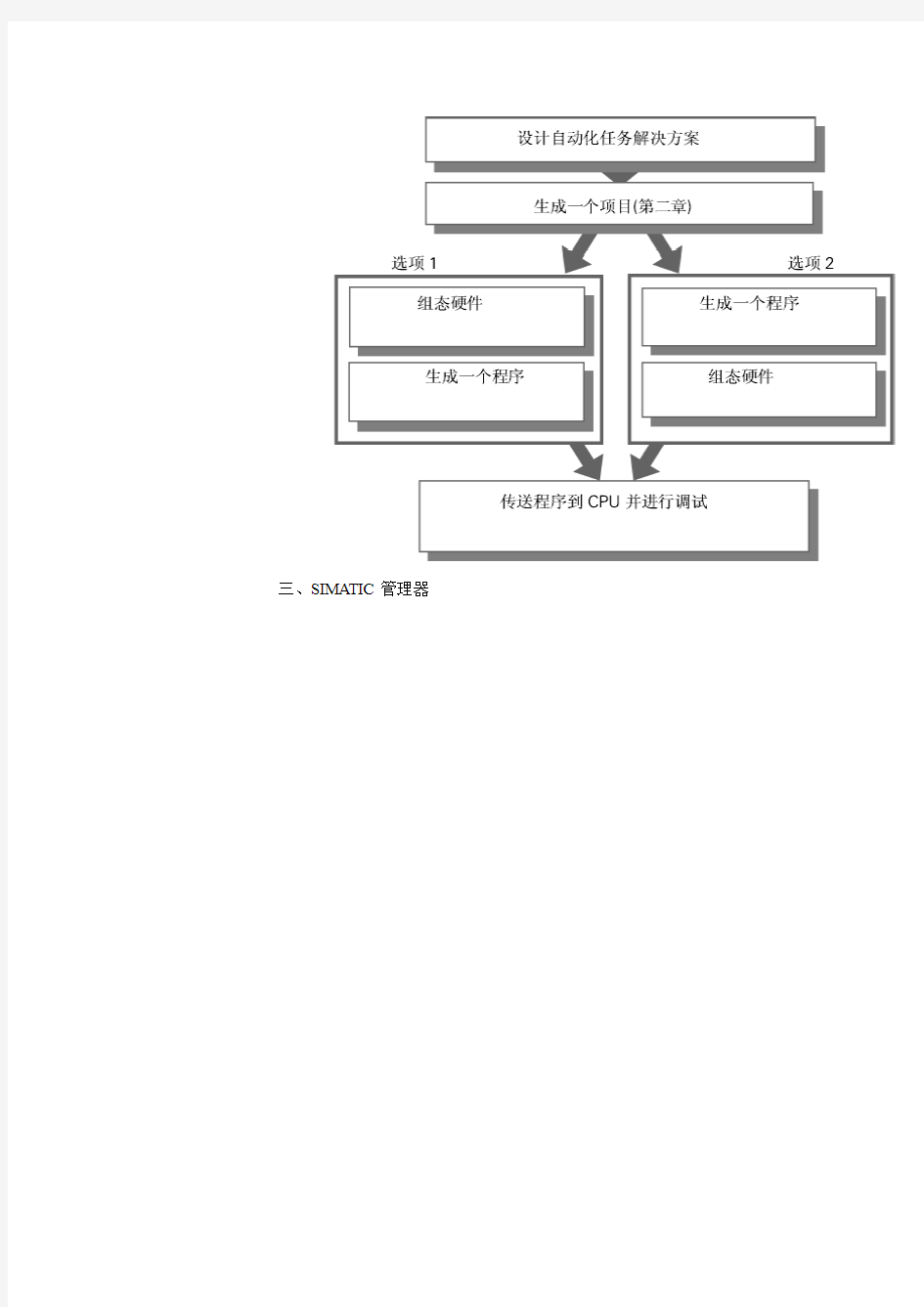
四、硬件组态
基本步骤:
(1)S7-300的组态
插槽配置的规则:
RACK(0)
插槽1:电源模板或为空
插槽2:CPU模板
插槽3:接口模板或为空
插槽4~11:信号模板、功能模板、通讯模板或为空
RACK(1~3)
插槽1:电源模板或为空
插槽2:为空
插槽3:接口模板
插槽4~11:信号模板、功能模板、通讯模板(如为IM365,则
该机架上不能插入C P模板)或为空
(2) S7-400的组态
S7-400PLC是由一个中央控制机架CR以及一个或多个扩展机架ER组成(当然也可以不用扩展机架),如你的CR上没有足够的插槽安装你的模板或者你希望独立于CR操作一些信号模板时,在距离允许范围内,可以考虑选用ER。
常用的S7 400机架
UR1(18 SLOT)和UR2(9 SLOT):通用机架,既可以用作中央控制器也可用做扩展
单元。
当UR1或UR2用作中央控制器时:
1、必需组件:一个电源模块和一个CPU
2、能以集中式扩展(最大为3m)或分布式扩展(最大为100m,S7EU)
3、扩展时需要发送接口模板,最多可插入6个接口模板。
4、最多可连接21个扩展单元。
CR2机架:用于有分割的中央控制器(18 SLOT,二个CPU在单一机架内彼此独立地并
行运行)。可用于SM模板,接收IM,电源模板。
1、必需组件:一个电源模块和两个CPU
2、以集中式扩展(最大为3m)或分布式扩展(最大为100m,S7EU)
3、扩展时需要发送接口模板,最多可插入6个接口模板。
4、最多可连接21个扩展单元。
ER1(18 SLOT)和ER2(9 SLOT)机架:用于有信号模板的扩展单元。没有C总线。
UR2-H机架;用于S7-400H。
注;集成在所有机架上的并行的I/O总线用于CPU与信号模板、功能模板进行高速数据交换。除ER1和ER2外所有机架上都有一个用于大量数据交换的串行通讯总线(K总线)。
UR1(用做CR
标准PS
冗余PS
CPU,M7-CPU
DI,DO,AI,AO
M7-FM
FM
CP
SEND IM
UR1(用做ER时)
标准PS
冗余PS
DI,DO,AI,AO
M7-FM
FM,CP
接收IM
ER1机架
标准PS
冗余PS
DI,DO,AI,AO
接收IM
CR2机架
标准PS
冗余PS
CPU1
CPU2
DI,DO,AI,AO
M7-FM
FM
CP
SEND IM
(3)硬件组态中模块的参数设置
模拟量输入模板:
A、两线制电流和四线制电流都只有两根信号线,它们之间的主要区别在于:两线
制电流的两根信号线既要给传感器或者变送器供电,又要提供电流信号;而四
线制电流的两根信号线只提供电流信号。因此,通常提供两线制电流信号的传
感器或者变送器是无源的;而提供四线制电流信号的传感器或者变送器是有源
的,因此,当您将您的模板输入通道设定为连接四线制传感器时,PLC只从模
板通道的端子上采集模拟信号,而当您将模板输入通道设定为连接二线制传感
器时,PLC的模拟输入模板的通道上还要向外输出一个直流24V的电源,以驱
动两线制传感器工作。要想正确设置模拟量输入模块的量程,您必须首先确定
传感器或者变送器的信号类型。
B、不同类型传感器到SM331-7Kx0x的接线
a、和电压传感器的连接
b、和2线电流传感器的连接
c、和4线电流传感器的连接
d、电阻型温度计(如PT100)和电阻的连接
-
对于二线回路,将M+与IC+跨接,M-与IC-跨接
对于三线回路,将M-与IC-跨接
SM331 SF灯亮表明硬件故障。可能的原因如下:模板所需24VDC电源未正确接入;前连接器未插到位;总线连接器未连好;有硬件中断产生(断线、超限),量程卡所插的方向与HW Config中的设置不符,等等。
(4)硬件组态的下载
(5)软件的下载和上传
五、仿真软件S7-PLCSIM的应用
第二章STEP7中程序对象
符号表symbols
在STEP7程序中,你可以寻址I/O信号,存储位、计数/定时器,数据块
和功能块。在程序中,可以用绝对地址来访问这些地址(如I0.0,Q0.0,
M0.0,DB0,FB1,FC1),也可以用符号地址,这会使你的程序具有很强
的可读性。符号表中定义的变量是全局变量,可供所有的逻辑块使用。全
局符号名在整个用户程序中必须是唯一的。在OB、FC、FB中TEMP里
声明的变量为局部变量,局部变量只是在它所在的块中有效。
符号名不能超过24个字符。
1、源文件夹
编写STL源文件的基本信息导出源文件
生成STL源文件导出源文件
将软件块模式插入STL源文件
将源代码插入STL源文件
检查STL源文件的一致性
编译STL源文件
从软件块生成STL源文件
2、软件块
组织块(OB)
函数块(FC)
功能块(FB)
系统函数块(SFC)
系统功能块(SFB)
3.1 1组织块
组织块是CPU的操作系统与用户程序之间的接口。用户可以通过以
下方法利用OB运行指定的程序组件
●当启动CPU时
●当循环运行或在设置的时间间隔时
●在特定的时刻或特定的日期
●在运行了一段指定的时间后
●当错误发生时
●当硬件中断发生时
组织块的执行还根据其分配的优先级而定。
OB1:OB1的循环运行从启动结束时开始。用户可以OB1内调用功
能块(FB,SFB)或函数(FC、SFC)。OB1在所有运行时监视的
组织块中具有最低的优先级。除了OB90,所有其他的OB均可将
OB1的运行中断。以下事件将使操作系统调用OB1:
●启动结束
●OB1运行结束(前一个循环)
OB1的运行结束后,操作系统将过程映像输出表PIQ写入外围模块
并发送所有的共享数据。在重新启动OB1前,操作系统更新过程映
像输入表并从CPU接收所有的共享数据。
S7提供了一种监视最大扫描循环时间的方法以确保最大的响应时间。如果用户程序超过了OB1的最大循环时间,操作系统将调用
OB80(时间故障组织块)。如果OB80未被编程,CPU将切换STOP
模式。
OB30~OB38:循环中断,利用这些组织块,可以使程序在相等的时间
间隔内开始执行。
注意:用户必须保证每个循环中断组织块的运行时间比时间间隔短。如果由于在一个循环中断组织块完成前到达时间间隔而导致
其再次准备执行,就将启动时间错误组织块(OB80)后将调用产生
错误的循环中断组织块。
OB40~OB47:硬件中断组织块。
当模块触发了一个硬件中断后,操作系统将识别插槽并决定相应的硬件中断组织块。如果该组织块比当前活动的优先级高,则将被启动。
OB80:时间故障组织块
例如超过了扫描循环时间或当前一个组织块还没有运行完毕而
有产生了调用同一个循环中断组织块的事件时,操作系统将调用
OB80,如OB80未被编程,则CPU将切换到STOP模式。
OB81:电源故障组织块
CPU操作系统在电源(S7-400)或备用电池发生故障时会调用
OB81,如OB81未被编程,CPU不进入STOP模式。
OB82:诊断中断组织块。
当具有诊断功能的模块发现错误时,CPU对输出和输入事件发出诊断中断。该操作系统调用OB82。如OB82未被编程,则CPU将切换到STOP模式。
OB83:插入/删除模块中断组织块
在运行模式时移走组态模块时将会启动OB83。如OB83未被编程,则CPU将切换到STOP模式。
OB84:CPU硬件故障组织块
当CPU发现多点接口网络,通信总线,或分散I/O的连接发生错误时,该操作系统调用OB84。如OB84未被编程,则CPU将切换到STOP模式。
OB85:优先级错误组织块
如OB85未被编程,则CPU将切换到STOP模式。
OB86:基板故障组织块
如OB86未被编程,则CPU将切换到STOP模式。
OB87:通信错误组织块
如OB87未被编程,则CPU将切换到STOP模式。
OB80~OB87称为异步错误中断。
OB121:编程错误组织
当产生一个导致程序运行错误的事件,CPU的操作系统将调用OB121。例如,如果用户在程序中调用一个未下载到CPU的块,
OB121将被调用。
OB122:I/O访问故障组织块
当访问模块内的数据时发生错误,CPU的操作系统将调用OB122。
一点建议:为了避免在发生一些非严重错误时CPU频频进入STOP状态,建议在项目中一般将OB80~OB87,OB121、OB122插入BLOCK 文件夹并下载到PLC中。
3.1.2 FC
3.1.3 FB
3.1.4 编程一个多重背景数据块
3.1.4 V AT:变量表
3.1.5 交叉参考表
3、STEP7的编程
(1)存储区域(地址范围参见具体的CPU手册)
输入过程映象区输入位I
输入字节IB
输入字IW
输入双字ID
输出过程映象区输出位Q
输出字节QB
输出字QW
输出双字QD
位存储器存储位M
存储字节MB
存储字MW
存储双字MD
I/O外部输入外设输入字节PIB
外设输入字PIW
外设输入双字PID
I/O外部输出外设输出字节PQB
外设输出字PQW
外设输出双字PQD
定时器T
计数器 C
数据块数据位DBX
数据字节DBB
数据字DBW
数据双字DBD
本地数据临时本地数据位L
临时本地数据字节LB
临时本地数据字LW
临时本地数据双字LD
什么叫本地数据:
本地数据区域是包含在FB或FC中使用的临时数据。这些数据也被称为动态本地数据。他们用做中间暂存器。当逻辑块FB或FC块结束时,这些数据丢失。数据是包含在本地数据堆栈中。
以字节为基准的存储器单元
) MW2
MD0
注意:当使用宽度为字或双字的绝对地址时,应保证没有生成任何重叠的字节分配。
(2)STEP7中基本数据类型以及使用常数的格式。
类型和说明位数格式选项范围和数字记数法举例
(3)STEP7中的时间
A、S5TIME (Time Duration) 的格式及访S5TIME的格式
S5TIME是用BCD码保存的,在数据存储区占用两个连续的字节。下图给出的例子中时间值为127,时基为1秒。
当使用S5TIME时,定义数值的范围为0~999,而且要指明使用的时基。时基指定了时间单位。
S5TIME时基及相应的时间范围如下:
您可以采用如下两种格式定义时间值:
?1) W#16#wxyz
o w = 时基(即时间间隔或精度)
o xyz = BCD格式的时间值
这种方式只能用于STL编程(但是可以通过中间变量转而给LAD编程赋值)。
?2) S5T#aH_bbM_ccS_dddMS
o a = 小时, bb = 分钟, cc = 秒, dd = 毫秒
o这种情况下时基自动选择,数值为该时基下取整去尾到下一个较低值。
您可以输入的最大值为9,990 秒,或2H_46M_30S。
B、如果想通过上位或触摸屏对PLC中S5TIME类型的参数进行设定,有如下方法:
1、从上位机写整型数INT或实数REAL到PLC,首先该数值需包含以毫秒为单位
的时间值,在写入PLC的数据存储区后,利用ITD(Integer to Double Integer)
或RND(Real to Double Integer with Rounding Off)将该值转换为双整形,然后
将该值写到类型为TIME的变量里,在程序中调用FC40,将TIME转换成
S5TIME即可
2、如果使用WinCC作为上位软件,或上位软件支持32位带符号浮点数,可以从
上位写32位带符号浮点数到PLC中定义为TIME的变量,然后在程序中调用
FC40,将TIME转换成S5TIME即可。
C、F C33用于S5TIME到TIME的转换。
D、当使用数据类型DATE_AND_TIME (DT) 时,将占用数据存储区的8个连续
字节,以BCD码格式保存。该数据类型范围如下:DT#1990-1-1-0:0:0.0 to
DT#2089-12-31-23:59:59.999
E、STEP7 中关于时间的常用的功能块
SFC 0 "SET_CLK" 设置CPU时钟
·SFC 1 "READ_CLK" 读出CPU时钟
FC 3 "D_TOD_DT" 将DA TE和TIME_OF_DAY (TOD) 结合起来,转换成DATE_AND_TIME (DT)。该功能块的管脚IN1必须在DATE#1990-01-01 到DATE#2089-12-31范围内。
FC6 "DT_DATE" 从DA TE_AND_TIME 中取出DATE。
FC 7 "DT_DAY" 从DATE_AND_TIME 中取出the day of the week,即星期几。
FC 8 "DT_TOD" 从DATE_AND_TIME 中取出时间。
1. S7-300/400 PLC寻址方式
1.1. 直接寻址
1.直接地址:例如I0.0,Q1.7,PIW256,PQW512,MD20,T15,C16,DB1.DBB10,
L10.0等
2.符号寻址:例如qq,ww.aa等
1.2. 间接寻址
1.存储器间接寻址:16位指针,例如OPN DB[MW2]
32位指针,例如A I[MD0]
2.寄存器间接寻址:32位指针,例如A I[AR1,P#0.0],A [AR1,P#0.0]
1.3. S7-300/400寻址方式图解
(4)如何使用指针
指针用来指向一个地址。使用这种寻址方式的优点在于可以在程序运行过程中实现变址。指针用于存储器间接寻址
程序中用于存储器间接寻址的语句包含一个指令、一个地址标识符、以及一个偏移量(偏移量必须在方括号内给出)。
下面给出一个双字格式的指针的例子:
L P#8.7 把指针值装载到累加器1
T I[MD2] 把指针值传送到MD2
A I[MD2] 查询I8.7的信号状态
= Q[MD2] 给输出位Q8.7赋值
存储区域内部寻址及交叉寻址
程序中采用这些寻址方式的语句包含一个指令以及下列内容:地址标识符、地址寄存器标识
符、偏移量。地址寄存器(AR1、AR2)及偏移量必须写在方括号内。
存储区域内部寻址例程
指针不包含指示存储区域的信息:
L P#8.7 把指针值装载到累加器1
LAR1 把指针从累加器1装载到AR1
A I[AR1,P#0.0] 查询I8.7的信号状态
= Q[AR1,P#1.1] 给输出位Q10.0赋值
偏移量0.0不起作用。输出Q10.0 等于8.7 (AR1) 加偏移量1.1。结果是10.0 ,而不是9.8,参见指针格式。
存储区域交叉寻址例程
在存储区域交叉寻址中,指针中包含指示存储区域的信息(例子中为I 和Q)。
L P#I8.7 把指针值及存储区域标识装载到累加器1
LAR1 把存储区域I 和地址8.7装载到AR1
L P#Q8.7 把指针值和地址标识符装载到累加器1
LAR2 把存储区域Q和地址8.7装载到AR2
A [AR1,P#0.0] 查询输入位I8.7的信号状态
= [AR2,P#1.1] 给输出位Q10.0赋值
偏移量0.0不起作用。输出Q10.0 等于8.7 (AR2) 加偏移量1.1。结果是10.0 ,而不是9.8,参见指针格式。
S7-300/S7400的扩展
二、S7-300系统扩展
基本原理
通常一套S7-300 PLC系统有一个主机架,安装有CPU的机架称为主机架,当主机架上的I/O模块(最多8块)上的控制点数不够时,可以再增加1-3个扩展机架,每个扩展机架最多可安装8个I/O模块,装在4到11槽,3个扩展机架最多安装24个I/O 模块。
在使用扩展机架时,需要机架(Rack),电源模块(PS),接口模块(IM),连接电缆368,S7-300的模块(信号模块、通讯模块、功能模块等)。
S7-300的安装机架是一种导轨。你可以使用该导轨,安装S7-300系统的所有模板。S7-300既可以水平安装,也可以垂直安装。要注意其允许的环境温度为:
垂直安装:0 至40 C
水平安装:0 至 60?C CPU 和电源必须安装在左侧或底部。
应配合模板的安装宽度选择不同长度导轨,不同模板的宽度可查样本得知,模拟I/O 模板和数字I/O 模板的宽度一般为40 mm 。
你必须保持图中所示的间隙,以提供模板安装空间,确保模板散热良好。
图1-1 间隙
使用单机架或多机架
是使用一个机架还是使用多个机架,取决于具体情况。 在下面的情况下应该使用单机架:
? 结构紧凑、需要节约空间
? CPU312、312 IFM 、312C 和CPU 313只能用单机架 ? 所需处理的信号量少
在下面的情况下应该使用多机架: 所需处理的信号量大 没有足够的插槽
如需将S7-300装在几个机架上,则需要接口模板(IM ),接口模板的使命是将S7-300背板总线从一个机架扩展到下一个机架。中央处理单元CPU 总是在0号机架上。接口模板又分如下两种。
线槽
*IM365 扩展机架支持P总线,只能使用信号模板。当扩展机架使用FM、CP 模块时,请选择IM360/361扩展模式。
下图所示为一台S7-300可编程序控制器的模板在4个模板机架上的安装情况。
机架3(ER)
连接电缆368
连接电缆368
机架2(ER)
连接电缆368
机架1(ER)
图1-2:安装举例
主机架配置方法
在STEP7中,通过简单的拖放操作就可以完成主机架的配置。配置过程中,添加到主机架中的模板的订货号(在硬件目录中选中一个模板,目录下方的窗口会显示该模板的订货号以及描述)应该与实际硬件一致。
首先直接新建一个项目,在项目中插入一个SIMATIC 300 Station,双击Hardware图标,打开硬件组态程序。在硬件目录中找到S7-300机架,拖拽到左上方的视图中,即可添加一个主机架。
图1-3 添加主机架
插入主机架后,分别向机架中的1号槽添加电源、2号槽添加CPU。硬件目录中的某些CPU型号有多种操作系统版本,在添加CPU时,CPU的型号和操作系统版本都要与实际硬件一致。
项目四编程软件及其使用 内容涵括: 1、编程软件的初步使用 2、编程软件的功能及编程方法 3、调试及运行监控 一、能力目标 熟悉掌握V4.0 STEP 7 MicroWIN SP3的使用和编程方法,调试及运行监控。 二、所需的材料、工具和设备 PLC实验板、装有STEP 7软件的计算机、数字量输入/输出模块。 三、项目要求 熟练掌握可编程序控制器编程元件的符号、意义和使用,掌握各基本指令的意义和使用,学会编程软件的安装和使用。 四、学习形式 以老师课堂讲解的形式学习,以学生小组的形式到实验室动手的形式实践 五、原理说明 STEP 7 - Micro/WIN是西门子公司专门为S7 - 300系列PLC设计开发的编程软件,可在全汉化的界面下进行操作。它基于Windows操作系统,为用户开发、编辑、调试和监控自己的应用程序提供了良好的编程环境。其目前最新的版本是STEP7 - Micro/WIN V 4. 0 SP5 (V4.0. 5.08)。该版本除了支持CPU的新功能外,其本身的功能也比以前的版本增强了很多。 4.1 编程软件的初步使用 4.1.1计算机的配置要求 STEP 7 - Micro/WIN要在PC机上运行,它对PC机的最小配置要求如下: (1)操作系统Windows 2000 SP3以上; Windows XP Home; Windows XP Professional; (2)硬盘至少40 MB以上空间。 4.1.2软件的安装与卸载 1. STEP 7 - Micro/WIN V4.O份妥革步骤 (1)将安装光盘插入CD-ROM,在光盘目录里双击Setup,进入安装向导。 (2)按照安装向导的提示完成软件的安装。软件程序安装路径可以使用默认子目录,也可以用"浏览"按钮弹出的对话框中任意选择或新建一个子目录。 (3)出现PG/PC Interface窗口单击OK按钮。
STEP7学习教程 目前,PLC的机型很多,但其基本结构、原理相同,基本功能、指令系统及编程方法类似。因此,本教案从实际应用出发,选择了当今最具特色和符合IEC标准的西门子S7 300系列高性能、中小型模块化可编程控制器作为背景机型,全面介绍了可编程控制器的STEP7 5.1版编程软件系统、工作方式、及编程方法和技巧,并以工程应用为实训目标,加强了技术应用、工程实践、功能指令和特殊功能模块应用的实训环节。 基础部分 课题一 创建并编辑项目 一、实训目的 1.通过上机操作,熟悉西门子STEP7编程软件的结构。 2.掌握创建编辑项目 二、基础知识 (一)启动STEP 7 启动Windows以后,你就会发现一个SIMATIC Manager(SIMATIC管理器)的图标,这个图标就是启动STEP 7的接口。 快速启动STEP7的方法:将光标选中SIMATIC Manager这个图标,快速双击,打开SIM ATIC管理器窗口。从这里你可以访问你所安装的标准模块和选择模块的所有功能。 启动STEP 7的另一方式:在Windows的任务栏中选中“Start”键,而后进入“ Simi atic”。 SIMATIC 管理器: SIMATIC管理器用于基本的组态编辑,SIMATIC管理器具有下列功能: ·建立Project ·硬件组态及参数设定 ·组态硬件网络 ·编写程序 ·编辑、调试程序 对各种功能的访问都设计成直观、易学的方式。可以使用SIMATIC管理器在下列方式工作。
·离线方式,不与可编程控制器相联 ·在线方式,与可编程控制器相联,注意相应的安全提示。 改变字符的大小 使用Windows的菜单指令Option>Font可以将字符和尺寸变成“小” “正常”或“大”。 (二)项目结构 项目可用来存储为自动化任务解决方案而生成的数据和程序。这些数据被收集在一个项目下,包括: ·硬件结构的组态数据及模板参数。 ·网络通讯的组态数据,以及为可编程模板编制的程序。 生成一个项目的主要任务就是为编程准备这些数据。 数据在一个项目中以对象的形式存储,这些对象在一个项目下按树状结构分布(项目层次),在项目窗口中各层次的显示与Windows资源管理器中的相似,只是对象图标不同。 项目层次的顶端结构如下: 1层:项目 2层:网络,站,或S7/M7程序; 3层:依据第二层中的对象而定。 项目窗口 项目窗口分成二个部分,左半部显示项目的树状结构,右半部窗口以选中的显示方式(大符号,小符号,列表,或明细数据)显示左半窗口中打开的对象中所包含的各个对象。在左半窗口点击“+”符号以显示项目的完整的树状结构。最后的结构看起来就像下图一样。 在对象层次的顶层是对象“S7-Pro1”作为整个项目的图标。它可以用来显示项目特性并以文件夹的形式服务于网络(组态网络),站(组态硬件),以及S7或M7程序(生成软件)。当选中项目图标时,项目中的对象显示在项目窗口的右半部分,位于对象层次(库以及项目)项部的对象在对话框中形成一个起始点用以选择对象。 项目查看 在项目窗口中,你可以通过选择“offline(离线)”显示编程设备中该项目结构下已有的数据,也可以通过选择“online(在线)”通过该项目显示可编程控制系统中已有的数据。 如果安装了相应的可选软件包,你还可以设置另外一种查看方式,:设备查看。 (三)建立一个项目
在这里你可以看到该卡 件的通道地址,并且可以 在此处定义每个通道信 号的符号名称 一个DI模块组态完毕! 9、按照上面的方法,我们可以组态一个DO模块,将会看到该模块的通道地址为:~ (根据实际填 写)。 我们可以组 态一个DO 模块
10、 按照上面的方法组态AI模拟量模块(6ES7 331 7KB02-0AB0);然后双击该模块,弹出模块属性画面。 双击该模块,弹出模 块属性画面 点击Measuring TYPE栏,为通道定义信号类型,点击Measuring Range,为通道定义信号量程范围, 如果现场信号为两线制4~20MA信号,需要将0-1通道定义为两线制4~20mA信号 系统将为每个通道定义地址,该处第一通道为PIW288、第二为PIW290 将0-1通道定 义为两线制 4~20mA信号
如果现场信号为PT100信号,需要将0-1通道定义为:TYPE:RT,信号范围:PT100 std.。由于PT100信号要占用四个接线端子,因此,本模块只能处理一个PT100热电阻信号。 点击OK,完成AI模块组态。系统将为每个通道定义地址,该处通道为PIW288; PT100 std 4~20MA电流信号 第一通道为:PIW288 第二通道为:PIW290 PT100信号 通道地址为:PIW288 最后点击,Save and Complice,存盘并编译硬件组态,完成硬件组态工作。 点击STATION \Consistency check ,如果弹出NO error 窗口,则表示没有错误产生!
下面再介绍一下模拟量INPUTS页面的几个设置属性。 在调试时,我们要将信号线断掉,看SF灯是否指示! ?一个AI模块组态完毕!可以休息一会了! 如果组态的CPU是带现场总线PROFIBUS-DP的,组态步骤将从第7步,跳转到11~17步骤完成。
STEP7常用功能块教程 1、 FC105是处理模拟量(1~5V、4~20MA等常规信号)输入的功能块,在 中,打开Libraries\stan dard library\ Ti-S7 Converting Blocks\fc105,将其调入OB1中,给各个管脚输入地址;如下:
其中,管脚的定义如下: IN---------模拟量模块的输入通道地址,在硬件组态时分配; HI_LIM---现场信号的最大量程值; LO_LIM--现场信号的最小量程值; BIPOLAR—极性设置,如果现场信号为+10V~-10V(有极性信号),则设置为1, 如果现场信号为4MA~20MA(无极性信号);则设置为0; OUT-------现场信号值(带工程量单位);信号类型是实数,所以要用MD200来存放; RET_VAL-FC105功能块的故障字,可存放在一个字里面。如:MW50; 2、 热电偶、热电阻信号的处理,该类信号实际值是通道整数值的1/10; 3、 FB41 PID控制模块的使用; PID模块是进行模拟量控制的模块,可以完成恒压、恒温等控制功能 在 中,打开Libraries\s tandard library\ PID Control block\FB41,将其调入OB1中,首先分配背景数据块DB41,再给各个管脚输入地址;如下:
4、脉冲输出模块FB43,该模块是将模拟量转换成比率的脉冲输出。Libraries\standard libra ry\ PID Control block\FB43,将其调入OB1中,首先分配背景数据块DB43,再给各个管脚输入地址; 如下:
STEP7 系列培训课程——硬件组态(科莱德科技开发有限公司) 目的:生成一个新项目,完成系统硬件配置并将其下载,完成系统配置。 步骤: 1、 双击计算机桌面上的SIMATIC Manager 图标,打开STEP7 主画面。点击FILE \ NEW ,按照图例输入文件名称 (TEST )和文件夹地址,然后点击OK ;系统将自动生成项目。 3、点亮TEST 项目名称,点击右键,选中Insert new object ,点击SIMATIC 300 STATION ,将生成一个S7-300的项目。
如果项目CPU是S7-400,那么选中SIMATIC 400 STATION即可。 4、将项目名称前面的+号点开或双击项目名称,选中SIMATIC 300(1),然后选中Hardware并双击/或右键点OPEN OBJECT,硬件组态画面即可打开! 双击项目名称 硬件组态区域 硬件模块详细
6、双击PS-300,选中PS 307 2A ,将其拖到机架RACK 的第一个SLOT ; Rail 拖 入到左边空白处
7、本步骤开始组态CPU,组态CPU的型号选择要根据实际的CPU型号而定,现以CPU312(定货号为:6ES7 312-1AD10)为例。双击CPU-300,双击CPU-312文件夹,选中6ES7 312-1AD03-0AB0,将其拖到机架RACK的第2个SLOT。 选中6ES7 312-1AD03-0AB 0,将其拖到机架 RACK的第2个 SLOT
8、双击打开SM300,双击打开DI300,选中SM321 DI16*DC24V 模块(定货号:6ES7 321-1BH02-0AA0),并将其拖入左下面的第4 槽中,系统将自动为模块的通道分配I/O 地址(该处为I0.0~I1.7)。 我们可以选中DI16Xdc24VDC 模块,点右键,选中EDIT SYMBOLIC NAMES 。。 将其拖入左 下面的第 4 槽中 系统将自动为模块的通道分配I/O 地址IB0~IB1(按位表示:I0.0~I1.7 )
编程软件及其使用 内容涵括: 1、编程软件的初步使用 2、编程软件的功能及编程方法 3、调试及运行监控 一、能力目标 熟悉掌握V4.0 STEP 7 MicroWIN SP3的使用和编程方法,调试及运行监控。 二、所需的材料、工具和设备 PLC实验板、装有STEP 7软件的计算机、数字量输入/输出模块。 三、项目要求 熟练掌握可编程序控制器编程元件的符号、意义和使用,掌握各基本指令的意义和使用,学会编程软件的安装和使用。 四、学习形式 以老师课堂讲解的形式学习,以学生小组的形式到实验室动手的形式实践 五、原理说明 STEP 7 - Micro/WIN是西门子公司专门为S7 - 300系列PLC设计开发的编程软件,可在全汉化的界面下进行操作。它基于Windows操作系统,为用户开发、编辑、调试和监控自己的应用程序提供了良好的编程环境。其目前最新的版本是STEP7 - Micro/WIN V 4. 0 SP5 (V4.0. 5.08)。该版本除了支持CPU的新功能外,其本身的功能也比以前的版本增强了很多。 4.1 编程软件的初步使用 4.1.1计算机的配置要求 STEP 7 - Micro/WIN要在PC机上运行,它对PC机的最小配置要求如下: (1)操作系统Windows 2000 SP3以上; Windows XP Home; Windows XP Professional; (2)硬盘至少40 MB以上空间。 4.1.2软件的安装与卸载 1. STEP 7 - Micro/WIN V4.O份妥革步骤 (1)将安装光盘插入CD-ROM,在光盘目录里双击Setup,进入安装向导。 (2)按照安装向导的提示完成软件的安装。软件程序安装路径可以使用默认子目录,也
目录 0 项目要求: (2) 1 项目分析与规划: (2) 2 系统IO口分配: (2) 3 系统接线原理图: (2) 4 系统控制方式规划: (2) 5 系统硬件选择与组态 (3) 6 PLC程序设计 (19) 7 触摸屏通讯设置、画面设计与变量控制 (25) 8 项目仿真测试 (37) 9 现场联机调试 (42)
0 项目要求: (1)有一台三相交流异步电动机,可以用操作站上的按钮控制,也可以用监控站的触摸屏控制; (2)操作站安装有三个按钮SB1、SB2和SB3,其中按钮SB1可以实现电动机的点动控制,按钮SB2控制电动机的连续运行,按钮SB3用来控制电动机的停止。另外操作站还有一个绿色指示灯HL1,当电动机点动运行时,HL1以1Hz的频率闪烁;当电动机连续运行时,HL1常亮;电动机停止运行时,HL1熄灭。 (3)触摸屏上设置有三个按钮,分别显示“点动”、“连续”和“停止”,其作用和操作站按钮SB1、SB2和SB3作用一样。触摸屏上同时有图形和文字显示当前电动机的三种状态(点动运行、连续运行与电机停止)。 1 项目分析与规划: 在本项目中,需要使用按钮和触摸屏来控制PLC程序,进而控制电动机的运行与停止,而PLC同时要通知触摸屏显示电动机的工作状态,PLC还需要控制指示灯指示电机目前的工作状态,所以项目的控制结构如图2.1所示。 2.1 项目控制结构 2 系统IO口分配: 3 系统接线原理图: (略) 4 系统控制方式规划:
(1)PLC控制程序规划 (2)触摸屏画面规划 1)只需要一幅画面 2)需要放置三个按钮对象,名称分别为“点动”、“连续”和“停止” 3)需要用图形来表示电动机的状态,可以采取用三个图形分别表示三种状态,也可以用一个图形不同颜色来表示三种状态,还可以用一个图形不同颜色/不同表现形式表示三种状态,在实例中选择一个图形不同颜色/不同表现形式表示。 4)需要用文本来显示电动机的状态,可以用文本的可见性来完成控制效果(电动机点动时,“点动运行”文本可见并闪烁;电动机连续运行时,“连续运行”文本可见;电动机停止时,“电机停止”文本可见)。 5)触摸屏需要传送给PLC的变量包括三个按钮,需要使用布尔变量来模拟一个按钮的动作(包括按钮按下和释放);触摸屏需要读取PLC的信息来显示电动机的状态,可以使用布尔变量,也可以使用整数变量(在实例中使用整数变量较为方便),并且图形显示和文本显示可以共用一个变量。 5 系统硬件选择与组态 在本项目中,选择PLC的类型为CPU314C-2DP,该CPU集成的输入输出点可以满足系统要求。触摸屏的型号为TP177B 6” color PN/DP。 (1)新建项目,起名并保存(最好不要包括中文) 双击桌面上的“SIMATIC Manager”图标,启动西门子PLC编程软件。