
第5卷第5期空 军 工 程 大 学 学 报(自然科学版)V ol.5N o.5 2004年10月JOURNA L OF AIR FORCE ENGINEERING UNIVERSITY(NAT URA L SCIENCE EDITION)Oct.2004
Ξ
一种基于DSP的PFC变换器采样控制算法
张恩利, 余侃民, 侯振义
(空军工程大学电讯工程学院,陕西西安 710077)
摘 要:为DSP控制的功率因数校正(PFC)变换器提出了一种新的采样算法,它能够很好地消除
PFC电路中高频开关动作产生的振荡对数字采样的影响。尤其是当开关频率高于30kH z时,所提出的采样算法能有效地提高开关抗噪声性能。最后将此算法运用到一台2kW的PFC变换器中,实验结果证明了该算法对于分析、设计和调试所有含开关的数字采样电路均有实用参考价值。
关键词:数字信号处理;功率因数校正;采样算法
中图分类号:T N86 文献标识码:A 文章编号:1009-3516(2004)05-0042-04
数字信号处理器(DSP)由于具有处理速度快、灵活、精确、可靠等特点,已逐渐取代了开关电源中传统的模拟控制,例如开关电源中的直流-直流(DC-DC)变换器,功率因数校正(PFC)变换器,以及高频脉宽调制(PW M)逆变器等[1~2]。本文在传统PFC变换器控制电路的基础上,提出了一种采用DSP作为PFC的控制电路的方法,并详细分析了在平均电流模式控制下传统的单周期单采样(SS OP)方法的不足,提出了能够极大改善开关抗噪声性能的新采样算法。
1 基于DSP的PFC控制原理
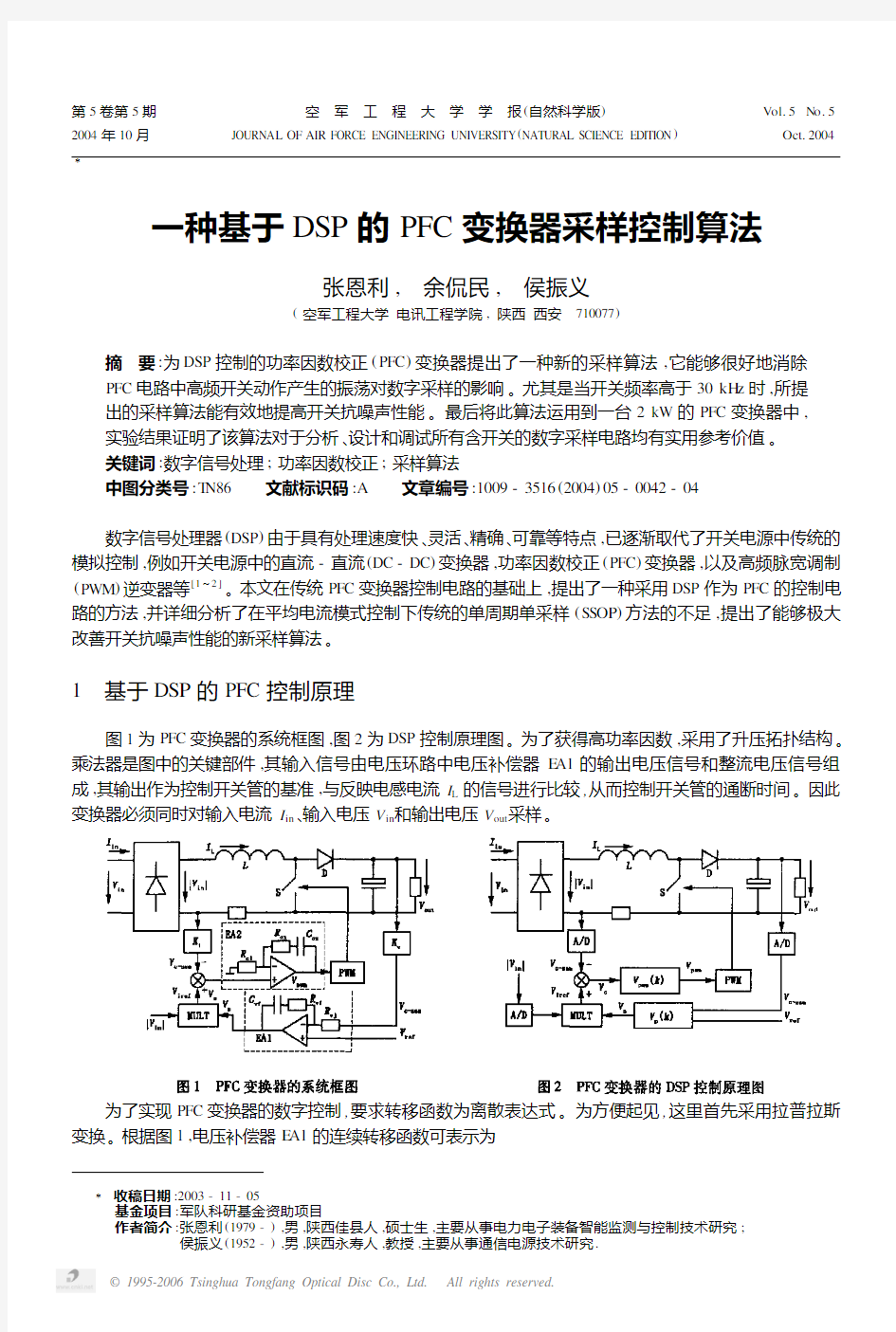
图1为PFC变换器的系统框图,图2为DSP控制原理图。为了获得高功率因数,采用了升压拓扑结构。乘法器是图中的关键部件,其输入信号由电压环路中电压补偿器E A1的输出电压信号和整流电压信号组成,其输出作为控制开关管的基准,与反映电感电流I L的信号进行比较,从而控制开关管的通断时间。因此变换器必须同时对输入电流I in、输入电压V in和输出电压V out采样。
为了实现PFC变换器的数字控制,要求转移函数为离散表达式。为方便起见,这里首先采用拉普拉斯变换。根据图1,电压补偿器E A1的连续转移函数可表示为
Ξ收稿日期:2003-11-05
基金项目:军队科研基金资助项目
作者简介:张恩利(1979-),男,陕西佳县人,硕士生,主要从事电力电子装备智能监测与控制技术研究;
侯振义(1952-),男,陕西永寿人,教授,主要从事通信电源技术研究.
G 1(S )=
V ref -V p V v -sam -V ref =K 1+K 2S
(1)其中K 1=R v f R vi ,K 2=1R vi C v f
。考虑到第一级采样和保持效果,将式(1)变成:
G ′1(S )=1-e -
TS S G 1(S )=1-e -
TS S K 1+K 2
S (2)
从而得到转移函数的离散表达式:
ΔV 0(k )=ΔV 0(k -1)+K 1ΔV 1(k )+(TK 2-K 1)ΔV 1(k -1)
(3)
式中ΔV 0(k )=V ref -V p (k ),ΔV 1(k )=V v -sam (k )-V ref ,k 表示采样序列数。从式(3)中可以清楚地看出,电压环路中电压补偿器E A1的输出电压在当前的采样周期是由它前一时刻的值和V sam 共同决定的,其关系式如下:
V p (k )=V p (k -1)-K 1V v -sam (k )-(TK 2-K 1)V v -sam (k -1)+TK 2V ref
(4)同样,电流环中的补偿器E A2的转移函数也可由图1得到:
G 2(S )=V pwm
V iref -V c -sam =V pwm V c =1+S K 3+1S K 4(5)
其中,K 3=R cz C cz ,K 4=R ci C ci 。因此,转移函数的离散表达式为
V pwm (k )=V pwm (k -1)+K 3+K 4K 4V c (k )+T -K 3-K 4K 4V c (k -1)(6)
图2是PFC 变换器的DSP 控制阶段。该阶段对3个主要电量进行采样:感应电流I L 、整流输入电压|V in |和输出电压V out 。这些值经过采样后再被转换成数字量,参与DSP 随后的计算过程。与开关频率比较,这3个信号中的两个电压信号就成了主要的低频信号。这里要求感应电流最好能被瞬时反馈,这一点在模拟控制器中是很容易实现的,而在数字信号处理中由于采样速率的限制和A/D 转换使得很难满足这一要求。在实际的采样算法中,采样信号用来计算后边周期脉冲的宽度。
2 单周期单采样方法的缺陷
对于一个数控的PFC 来说,SS OP 使控制器相对模拟PFC 而言对噪声更加敏感。由于开关噪声与电流传感器有关并受其影响,在开关点上经常会出现高频振荡,而且振荡将持续在一个相当长的周期内,这些噪声将影响系统的正常工作。最佳的解决方法就是通过调整采样点来避开此采样区间,即不固定点采样算法。另一方面,可采用DSP 芯片来限制采样速率和A/D 转换。
基于上述分析,SS OP 采样方法看似完美[3]。但采用这种采样算法后又会带来新的问题:如何在每一次开关循环中都能确定一个固定的采样点?而上面所提到的条件又如何在任何时刻都能得到满足呢?在采用了SS OP 方法的PFC 应用中,输入电流必须跟随正弦输入电压,且输出电压必须始终为常数。占空比从接近于1减小到最小值δmin ,而正弦交流电压相应地从零变化到峰值。如果δmin 太小的话,就无法满足SS OP 算法的要求。最小占空比由下式给出:
δmin =1-2V in ,max V out (7)
通常,对于一个通用输入电压的PFC 变换器来说,一般将其输出电压设计在385V 左右。输入电压若为110V ,δmin 可以满足要求,但若为220V ,δmin 就只能达到0.12~0.22.假定主电压的变化范围为10%,则δmin 将变得更低。由于占空比δ在每一周期内从δmin 变化到1,因此如果采样过程能够在导通时间内结束,就可能避开开关噪声的干扰。所以功率转换开关S 的导通时间便成了提高DSP 控制PFC 变换器开关频率的主要限制因素。
3 采样算法原理
由于DSP 本身具有很强的运算能力,所以它能够通过一种新的采样算法来消除SS OP 算法的缺陷。假3
4第5期张恩利等:一种基于DSP 的PFC 变换器采样控制算法
定电路工作在固定频率f s =(1/T )下,开关噪声振荡保持周期为τosc ,采样周期为τsam 。为保证开关的抗噪声性能,必须满足以下要求:
a )在开关转换后的τosc 间隔时间内不能进行采样;
b )在采样后的τsam 间隔时间内不能进行开关转换,因为任何扰动都有可能引起采样结果发生错误。针对以上两个条件,对采样时刻δ1T 和δ2T 定义如下:
δ1T =τosc
(8)δ2T =2τosc +τsam (9)
由以上两式可知:一旦τosc 和τsam 确定后,δ1T 和δ2T 的值也就确定了。
此时,就可以在控制器中应用Z 域的稳定性分析。经计算可得最大开关频率为
f s =1δ2T +τsam (10)
本周期时间脉冲宽度δT 是利用上一周期所获得采样值经计算得到的,再根据δT 是否大于τosc +τsam 来确定采样时间是否合适。如果δT 比τosc +τsam 大,如图3(a )所示,δ1T 便是合适的采样点;如果δT <τosc +τsam ,则i L (δ2T )被采样。但不能直接用i L (δ2T )来计算脉宽,因为在i L (δ1T )和i L (δ2T )之间存在着一定的误差(此误差可通过电流补偿环路中的积分算法来消除)。因此,必须先从i L (δ2T )中求出i L (δ1T )的值。这又需要考虑2种情况,分别如图3(b )和图3(c )所示
。
(a ) δT >δ1T +τsam (b ) δT <δ1T =τosc (c ) δ1T <δT ≤δ1T +τsam
图3 当δ变化时的3种不同采样模式
1)δT <δ1T =τosc
在此条件下,两个采样点δ1T 和δ2T 都位于开关周期的截止时间段,如图3(b )所示。
2)δ1T <δT ≤δ1T +τsam
在此条件下,采样点δ1T 和δ2T 分别位于开关S 的导通时间和截止时间,如图3(c )所示,此时可得到以下等式:
i L (δT )-i L (δ1T )=
|V in |L (δ-δ1)T (11)i L (δT )-i L (δ2T )=V out -|V in |L
(δ2-δ)T (12)由以上两式,又可以得到:
Δi L2=i L (δ1T )-i L (δ2T )=V out L (δ2-δ)T -|V in |L (δ2-δ1)T (13)
4 实验结果
将此算法运用到一台2kW 的PFC 变换器中,为了提高效率并减少噪声,选择开关频率为33kH z 的折衷方案。采用DSP T MS320F240作为控制芯片,其最大采样保持时间τsam 约为1μ
s 。开关转换后的每一个振荡周期τosc 约为6μs 。再根据式(8)、(9),采样点δ1T 和δ2T 分别选在6μ
s 和13μs 处,输入和输出电压分别为交流220~240V 和直流400V 。
图4为在3种不同采样模式下的感应电流波形,图5为输入电压和输入电流波形图。经测量,输入电流的总谐波失真为4.4%,功率因数为0.98。
44空军工程大学学报(自然科学版)2004年
(a ) δT >δ1T +τsam (b ) δT <δ1T =τosc (c ) δ1T <δT ≤δ1T +τsam
图4 3种采样模式下电流波形图(5A /格)
V in :100V /格,i in :10A /格,t :5ms /格
图5 输入电压和电流波形图
5 结论
本文提出了一种DSP 控制的PFC 新的采样算法,它节省了大量的
系统资源,这些节省的系统资源可以用来控制DC -DC 或是DC -AC 变
换器。该方案使整个系统仅用一片DSP 芯片来控制,从而极大降低了硬
件的成本。本文的方法和结论对于分析、设计和调试所有含开关的数字
采样电路均有实用参考价值。
参考文献:[1] Qin Y,Du S 1C ontrol of S ingle Phase P ower Factor Pre -Regulator for An On -Line Uninterruptible P ower Supply Using Fuzzy Logic In 2
ference [A]1Proc.15th Annu.IEEE Appl.P ower E lectron.C on f.(APEC ’97)[C]1San Jose :1996.699-702.
[2] Qin Y,Du S 1A N ovel Adaptive Hysteresis Band Current C ontrol Using A DSP F or A P ower Factor C orrected On -Line UPS[A].Proc.
23rd IEEE Int.C on f.Ind.E lectron.,C ontr.Instrum.(IEC ON ’97)[C].New orleans :1997.208-212.
[3] Wall S ,Jacks on R 1Fast C ontroller Design F or S ingle -Phase P ower -Factor C orrection System[J ].IEEE T rans.IE ,1997,(44):654-
6601
(编辑:门向生)
A Sampling Algorithm for DSP Controlled PFC Converter
ZH ANG En -li , Y U K an -min , H OU Zhen -yi
(The T elecommunication Engineering Institute ,Air F orce Engineering University ,X i ′an ,Shaanxi 710077,China )
Abstract :A novel sam pling alg orithm is presented for DSP controlled power factor correction (PFC )converters ,which can success fully av oid the in fluences of the oscillation brought by the operational high -frequency switching in PFC cir 2cuit.The proposed sam pling alg orithm can greatly im prove the switching noise immunity ,especially when the switching frequency is above 30kH z.Finally a PFC converter with 2kW based on the proposed sam pling alg orithm is im plemented ,and the experimental results prove the practicality of the proposed novel sam pling alg orithm in the analysis ,design and debugging of all digital sam pling circuits with switching.
K ey w ords :DSP ;power factor correction (PFC );sam pling alg orithm
5
4第5期张恩利等:一种基于DSP 的PFC 变换器采样控制算法
D D C控制器直接数字控制系统(D i r e c t D i g i t a l C o n t r o l简 称D D C),
基本概述 DDC(Direct Digital Control)直接数字控制,通常称为DDC控制器。D DC系统的组成通常包括中央控制设备(集中控制电 脑、彩色监视器、键盘、打印机、不间断电源、通讯接口等)、现场DDC控制器、通讯网络、以及相应的传感器、执行器、调节阀等元器件。 它代替了传统控制组件,如温度开关、接收控制器或其它电子机械组件,及优于PLC等,特别成为各种建筑环境控制的通用模式。DDC系统是利用微信号处理器来做执行各种逻辑控制功能,它主要采用电子驱动,但也可用传感器连接气动机构。DDC系统的最大特点就是从参数的采集、传输到控制等各个环节均采用数字控制功能来实现。同时一个数字控制器可实现多个常规仪表控制器的功能,可有多个不同对象的控制环路。 工作原理 所有的控制逻辑均由微信号处理器,并以各控制器为基础完成,这些控制器接收传感器,常用融点或其它仪器传送来的输入信号,并根据软件程序处理这些信号,再输出信号到外部设备,这些信号可用于启动或关闭机器,打开或关闭阀门或风门,或按程序执行复杂的动作。这些控制器可用手操作中央机器系统或终端系统。 DDC控制器是整个控制系统的核心。是系统实现控制功能的关键部件。它的工作过程是控制器通过模拟量输入通道(AI)和开关量输入通道(DI)采集实时数据,并将模拟量信号转变成计算机可接受的数字信号(A/D转换),然后按照一定的控制规律进行运算,最后发出控制信号,并将数字量信号转变成模拟量信号(D/A转换),并通过模拟量输出通道(AO)和开关量输出通道(DO)直接控制设备的运行。 功能介绍 DDC控制器的软件通常包括基础软件、自检软件和应用软件三大块。其中基础软件是作为固定程序固化在模块中的通用软件,通常由DDC生产厂家直接写在微处理芯片上,不需要也不可能由其它人员进行修改。各个厂家的基础软件基本上是没有多少差别的。设置自检软件和保证DDC控制器的
深圳大学实验报告课程名称:DSP系统设计 实验项目名称:DSP系统设计实验 学院:机电与控制工程学院 专业:自动化 指导教师:杜建铭 报告人1:. 学号:。班级:3 报告人2:. 学号:。班级:3 报告人3:. 学号:。班级:3 实验时间: 实验报告提交时间: 教务处制
实验一、CCS入门试验 一、实验目的 1. 熟悉CCS集成开发环境,掌握工程的生成方法; 2. 熟悉SEED-DEC2812实验环境; 3. 掌握CCS集成开发环境的调试方法。 二、实验仪器 1.TMS320系列SEED-DTK教学试验箱24套 2. 台式PC机24台 三、实验内容 1.仿真器驱动的安装和配置 2. DSP 源文件的建立; 3. DSP程序工程文件的建立; 4. 学习使用CCS集成开发工具的调试工具。 四、实验准备: 1.将DSP仿真器与计算机连接好; 2.将DSP仿真器的JTAG插头与SEED-DEC2812单元的J1相连接; 3.启动计算机,当计算机启动后,打开SEED-DTK2812的电 源。SEED-DTK_MBoard单元的+5V,+3.3V,+15V,-15V的电源指示灯及SEED-DEC2812的电源指示灯D2是否均亮;若有不亮,请断开电源,检查电源。 五、实验步骤 (一)创建源文件 1.进入CCS环境。
2.打开CCS选择File →New →Source File命令 3.编写源代码并保存 4.保存源程序名为math.c,选择File →Save 5.创建其他源程序(如.cmd)可重复上述步骤。 (二)创建工程文件 1.打开CCS,点击Project-->New,创建一个新工程,其中工程名及路径可任意指定弹 出对话框: 2.在Project中填入工程名,Location中输入工程路径;其余按照默认选项,点击完成 即可完成工程创建; 3.点击Project选择add files to project,添加工程所需文件;
《计算机控制系统》作业参考答案 作业一 第一章 1.1什么是计算机控制系统?画出典型计算机控制系统的方框图。 答:计算机控制系统又称数字控制系统,是指计算机参与控制的自动控制系统,既:用算机代替模拟控 制装置,对被控对象进行调节和控制. 控制系统中的计算机是由硬件和软件两部分组成的.硬件部分: 计算机控制系统的硬件主要是由主机、外部设备、过程输入输出设备组成; 软件部分: 软件是各种程序的统称,通常分为系统软件和应用软件。 1.2.计算机控制系统有哪几种典型的类型?各有什么特点。 答:计算机控制系统系统一般可分为四种类型: ①数据处理、操作指导控制系统;计算机对被控对象不起直接控制作用,计算机对传感器产生的参数巡回检测、处理、分析、记录和越限报警,由此可以预报控制对象的运行趋势。 ②直接数字控制系统;一台计算机可以代替多台模拟调节器的功能,除了能实现PID 调节规律外, 还能实现多回路串级控制、前馈控制、纯滞后补偿控制、多变量解藕控制,以及自适应、自学习,最优控制等复杂的控制。 ③监督计算机控制系统;它是由两级计算机控制系统:第一级DDC 计算机, 完成直接数字控制功能;第二级SCC 计算机根据生产过程提供的数据和数学模型进行必要的运算,给DDC 计算机提供最佳给定值和最优控制量等。 ④分布式计算机控制系统。以微处理机为核心的基本控制单元,经高速数据通道与上一级监督计算机和CRT 操作站相连。 1.3.计算机控制系统与连续控制系统主要区别是什么?计算机控制系统有哪些优点? 答:计算机控制系统与连续控制系统主要区别:计算机控制系统又称数字控制系统,是指计算机参与 控制的自动控制系统,既:用计算机代替模拟控制装置,对被控对象进行调节和控制。 与采用模拟调节器组成的控制系统相比较,计算机控制系统具有以下的优点: (1)控制规律灵活,可以在线修改。(2)可以实现复杂的控制规律,提高系统的性能指标. (3)抗干扰能力强,稳定性好。 (4)可以得到比较高的控制精度。 (5)能同时控制多个回路,一机多用,性能价格比高。 (6)便于实现控制、管理与通信相结合,提高工厂企业生产的自动化程度. (7)促进制造系统向着自动化、集成化、智能化发展。 图1.3-2 典型的数字控制系统 给定
DSP实验报告 软件实验 1无限冲激响应滤波器(IIR) 算法 一.实验目的 1 .掌握设计IIR 数字滤波器的原理和方法。 2 .熟悉IIR 数字滤波器特性。 3 .了解IIR 数字滤波器的设计方法。 二.实验设备 PC 兼容机一台,操作系统为Windows2000( 或Windows98 ,WindowsXP ,以下默认为Windows2000) ,安装Code Composer Studio 2.21 软件。 三.实验原理 1 .无限冲激响应数字滤波器的基础理论。 2 .模拟滤波器原理(巴特沃斯滤波器、切比雪夫滤波器、椭圆滤波器、贝塞尔滤波器)。 3 .数字滤波器系数的确定方法。 4 .根据要求设计低通IIR 滤波器: 要求:低通巴特沃斯滤波器在其通带边缘1kHz 处的增益为-3dB ,12kHz 处的阻带衰减为30dB ,采样频率25kHz 。设计: - 确定待求通带边缘频率fp1Hz 、待求阻带边缘频率fs1Hz 和待求阻带衰减-20log δsdB 。 模拟边缘频率为:fp1=1000Hz ,fs1=12000Hz 阻带边缘衰减为:-20log δs=30dB - 用Ω= 2πf/fs 把由Hz 表示的待求边缘频率转换成弧度表示的数字频率,得到Ωp1 和Ωs1 。 Ωp1=2 πfp1/fs=2 π1000/25000=0.08 π弧度 Ωs1=2 πfs1/fs=2 π12000/25000=0.96 π弧度 - 计算预扭曲模拟频率以避免双线性变换带来的失真。 由w=2fs tan( Ω/2) 求得wp1 和ws1 ,单位为弧度/ 秒。 wp1=2fs tan( Ωp1/2)=6316.5 弧度/ 秒 ws1=2fs tan( Ωs1/2)=794727.2 弧度/ 秒 - 由已给定的阻带衰减-20log δs 确定阻带边缘增益δs 。
DSP运行实验报告 一、实验目的 熟悉CCS软件仿真下,DSP程序的下载和运行;熟悉借助单片机的DSP程序下载和运行; 熟悉借助仿真器的DSP程序下载和运行;熟悉与DSP程序下载运行相关的CCS编程环境。 二、实验原理 CCS软件仿真下,借用计算机的资源仿真DSP的内部结构,可以模拟DSP程序的下载和运行。 如果要让程序在实验板的DSP中运行、调试和仿真,可以用仿真器进行DSP程序下载和运行。初学者也可以不用仿真器来使用这款实验板,只是不能进行程序调试和仿真。 在本实验板的作用中,单片机既是串口下载程序的载体,又是充当DSP 的片外存储器(相对于FLASH),用于固化程序。 三、实验设备、仪器及材料 安装有WINDOWS XP操作系统和CCS3.3的计算机。 四、实验步骤(按照实际操作过程) 1、CCS软件仿真下,DSP程序的下载和运行。 第一步:安装CCS,如果不使用仿真器,CCS 的运行环境要设置成一个模拟仿真器(软仿真)。
第二步:运行CCS,进入CCS 开发环境。 第三步:打开一个工程。 将实验目录下的EXP01目录拷到D:\shiyan下(目录路径不能有中文),用[Project]\[Open]菜单打开工程,在“Project Open”对话框中选 EXP01\CPUtimer\CpuTimer.pjt,选“打开”, 第四步:编译工程。 在[Project]菜单中选“Rebuild All”,生成CpuTimer.out文件。 第五步:装载程序。 用[File]\[Load Program]菜单装载第四步生成CpuTimer.out文件,在当前工程目录中的Debug 文件夹中找到CpuTimer.out文件,选中,鼠标左键单击“打开”。
数字电源控制系统的应用实例 在数字电源的所有讨论中,必须区分两个关键的概念:功率控制和功率管理。Ericsson 公司采用电源控制这个术语来表达电源内部的控制功能,特别是器件内部能量流的逐周期管理。这个定义包括反馈回路和内部管理功能。与电源的开关频率相比,电源控制功能以实时方式运行。控制功能可以采用模拟或数字技术,通过采用通常对终端用户而言是一回事的任意一种技术的电源来实现。也就是说,采用数字电源控制可能不需要终端用户端的任何改变或新设计。 相比之下,电源管理是指一个或多个电源外部的通信和/或控制。这包括电源系统配置、个别电源的控制和监视以及故障检测通信。电源管理功能并不是实时的,这些功能以一个比电源的开关频率慢的时间刻度工作。现在,这些功能开始结合模拟和数字技术。例如,电阻通常对输出电压进行编程,而电源时序通常需要连接至每个电源的专用控制线路。根据Ericsson的定义,数字电源管理意味着所有这些功能都采用数字技术。此外还采用某种数据通信总线结构来最大限度地降低互连复杂性,而不是对每个电源采用多个定制的互连进行时序和故障监视。 电源控制 图1的左边是一个脉宽调制(PWM)IC,这个电路为标准模拟控制回路提供主要控制。一个电阻分压器对电源的输出电压进行采样,误差放大器将该输出电压与DC参考电压进行比较。误差放大器的输出是一个强度与所需的输出电压校正成正比的模拟信号。这个误差信号馈入到PWM芯片,该芯片产生一个其脉宽由误差信号定义的输出脉冲。PWM输出脉冲则控制功率级半导体(通常为MOSFET)的导通时间。由于MOSFET具有较大的输入门电容,因此驱动器电路有必要有效率地导通和关断它们。固定电阻电容网络一般会补偿回路,以确保动态响应和稳定性之间的正常平衡。
D D C控制器直接数字 控制器
DDC控制器直接数字控制器 DDC控制器直接数字控制器2010-06-24 18:08基本概述 DDC(Direct Digital Control)直接数字控制,通常称为DDC控制器。DDC 系统的组成通常包括中央控制设备(集中控制电脑、彩色监视器、键盘、打印机、不间断电源、通讯接口等)、现场DDC控制器、通讯网络、以及相应的传感器、执行器、调节阀等元器件。它代替了传统控制组件,如温度开关、接收控制器或其它电子机械组件,及优于PLC等,特别成为各种建筑环境控制的通用模式。DDC系统是利用微信号处理器来做执行各种逻辑控制功能,它主要采用电子驱动,但也可用传感器连接气动机构。DDC系统的最大特点就是从参数的采集、传输到控制等各个环节均采用数字控制功能来实现。同时一个数字控制器可实现多个常规仪表控制器的功能,可有多个不同对象的控制环路。 工作原理 所有的控制逻辑均由微信号处理器,并以各控制器为基础完成,这些控制器接收传感器,常用融点或其它仪器传送来的输入信号,并根据软件程序处理这些信号,再输出信号到外部设备,这些信号可用于启动或关闭机器,打开或关闭阀门或风门,或按程序执行复杂的动作。这些控制器可用手操作中央机器系统或终端系统。DDC控制器是整个控制系统的核心。是系统实现控制功能的关键部件。它的工作过程是控制器通过模拟量输入通道(AI)和开关量输入通道(DI)采集实时数据,并将模拟量信号转变成计算机可接受的数字信号(A/D转换),然后按照一定的控制规律进行运算,最后发出控制信号,并将数字量信号转变成模拟量信号(D/A转换),并通过模拟量输出通道(AO)和开关量输出通道(DO)直接控制设备的运行。 功能介绍
DSP实验报告
软件实验 1无限冲激响应滤波器(IIR) 算法 一.实验目的 1 .掌握设计IIR 数字滤波器的原理和方法。 2 .熟悉IIR 数字滤波器特性。 3 .了解IIR 数字滤波器的设计方法。 二.实验设备 PC 兼容机一台,操作系统为Windows2000( 或Windows98 ,WindowsXP ,以下默认为Windows2000) ,安装Code Composer Studio 2.21 软件。 三.实验原理 1 .无限冲激响应数字滤波器的基础理论。 2 .模拟滤波器原理(巴特沃斯滤波器、切比雪夫滤波器、椭圆滤波器、贝塞尔滤波器)。 3 .数字滤波器系数的确定方法。 4 .根据要求设计低通IIR 滤波器: 要求:低通巴特沃斯滤波器在其通带边缘1kHz 处的增益为-3dB ,12kHz 处的阻带衰减为30dB ,采样频率25kHz 。设计: - 确定待求通带边缘频率fp1Hz 、待求阻带边缘频率fs1Hz 和待求阻带衰减-20log δsdB 。 模拟边缘频率为:fp1=1000Hz ,fs1=12000Hz 阻带边缘衰减为:-20log δs=30dB - 用Ω= 2πf/fs 把由Hz 表示的待求边缘频率转换成弧度表示的数字频率,得到Ωp1 和Ωs1 。 Ωp1=2 πfp1/fs=2 π1000/25000=0.08 π弧度 Ωs1=2 πfs1/fs=2 π12000/25000=0.96 π弧度 - 计算预扭曲模拟频率以避免双线性变换带来的失真。 由w=2fs tan( Ω/2) 求得wp1 和ws1 ,单位为弧度/ 秒。 wp1=2fs tan( Ωp1/2)=6316.5 弧度/ 秒 ws1=2fs tan( Ωs1/2)=794727.2 弧度/ 秒 - 由已给定的阻带衰减-20log δs 确定阻带边缘增益δs 。 因为-20log δs=30 ,所以log δs=-30/20 ,δs=0.03162
一、实验原理: 1、无限冲击响数字滤波器的基础理论; 2、模拟滤波器原理(巴特沃斯滤波器、切比雪夫滤波器、贝塞尔滤波器); 3、双线性变换的设计原理。 二、实验内容: 1、复习有关巴特沃斯滤波器设计和用双线性变换法设计IIR数字滤波器的知识; 2、阅读本实验所提供的样例子程序; 3、运行CCS软件,对样例程序进行跟踪,分析结果; 4、填写实验报告。 5、样例程序实验操作说明 1)正确完成计算机、DSP仿真器和实验箱连接后,开关K9拨到右边,即仿真器选择连接右边的CPU:CPU2; 2)“A/D转换单元”的拨码开关设置: JP3 3)检查:计算机、DSP仿真器、实验箱是否正确连接,系统上电; 4)置拨码开关S23的1、2拨到OFF,用示波器分别观测模拟信号源单元的2号孔“信号源1”和“信号源2”输出的模拟信号,分别调节信号波形选择、信号频率、信号输出幅值等旋钮,直至满意,置拨码开关S23的1到ON,两信号混频输出; 三、程序分析: cpu_init(); //CPU初始化 fs = 25000; //设置采样频率为2500HZ nlpass = 0.18; //设置通带上限频率归一化参数为0.18 nlstop = 0.29; //设置阻带下限截止频率归一化参数为0.29 biir2lpdes(fs,nlpass,nlstop,a,b); 根据双线性变换法求滤波器的系数a和b set_int(); //调用低通滤波器子程序对信号进行滤波 中断程序注释: interrupt void int1()
{ in_x[m] = port8002; //读取port8002端口的数值 in_x[m] &= 0x00FF; //取后八位送入X[m] m++; //每取一个数字m加1 intnum = m; if (intnum == Len) //当取到128个字节时,重新读取port8002端口的数值 { intnum = 0; xmean = 0.0; for (i=0; i 北京邮电大学DSP硬件实验报告 学院: 电子工程学院 专业: 姓名: 学号: 班级: 实验一常用指令实验 一、实验目的 熟悉DSP开发系统的连接 了解DSP开发系统的组成和结构和应用系统构成 熟悉常用C54X系列指令的用法(程序寻址,寄存器,I/O口,定时器,中断控制)。 二、实验步骤与内容 (一)简单指令程序运行实验 源程序: ;File Name:exp01.asm ;the program is compiled at no autoinitialization mode --程序在非自动初始化模式下编译 .mmregs --(enter memory-mapped registers into the symbol table) --进入记忆映射注册进入符号表 .global _main --(identify one or more global(external)symbols)--定义一个或多个全局变量 _main: stm(累加器的低端存放到存储器映射寄存器中) #3000h,sp(堆栈指针寄存器);堆栈指针的首地址设为#3000h ssbx(状态寄存器位置位)xf ;状态寄存器位置位,灯亮 call (非条件调用,可选择延迟)delay(存储器延时) ;调用delay函数延时 rsbx(状态寄存器复位)xf ;状态寄存器位复位,灯灭 call delay ;调用delay函数延时 b (累加器)_main ;可选择延迟的无条件转移,循环执行 nop(无操作) nop ;delay .5 second delay: ;延迟0.5秒 stm 270fh,ar3 (辅助寄存器3) ;把地址存放到存储器映射寄存器中 loop1: stm 0f9h,ar4 (辅助寄存器4);把地址存放到存储器映射寄存器中 loop2: banz loop2,*ar4- ;AR4不为0时转移,指针地址减一 第二章 数字控制系统的组成 第一节 数字控制系统硬件及软件组成 一、 硬件部分 计算机控制系统的硬件包括主机、接口电路、过程输入/输出通道、外部设备、操作台等。 1、主机 它是过程计算机控制系统的核心,由中央处理器(CPU)和内存储器组成。主机根据输入通道送来的被控对象的状态参数,按照预先制定的控制算法编好的程序,自动进行信息处理、分析、计算,并作出相应的控制决策,然后通过输出通道发出控制命令,使被控对象按照预定的规律工作。 2、接口电路 它是主机与外部设备、输入/输出通道进行信息交换的桥梁。在过程计算机控制系统中,主机接收数据或者向外发布命令和数据都是通过接口电路进行的,接口电路完成主机与其它设备的协调工作,实现信息的传送。 3、过程输入/输出通道 过程输入输出(I/O)通道在微机和生产过程之间起着信号传递与变换的纽带作用,它是主机和被控对象实现信息传送与交换的通道。 模拟量输入通道把反映生产过程或设备工况的模拟信号转换为数字信号送给微机;模拟量输出通道则把微机输出的数字控制信号转换为模拟信号(电压或电流)作用于执行设备,实现生产过程的自动控制。微机通过开关量(脉冲量、数字量)输入通道输入反映生产过程或设备工况的开关信号(如继电器接点、行程开关、按纽等)或脉冲信号;通过开关量(数字量)输出通道控制那些能接受开关(数字)信号的电器设备。 1)、模拟量输入(AI)通道: 生产过程中各种连续的物理量(如温度、流量、压力、液位、位移、速度、电流、电压以及气体或液体的PH值、浓度、浊度等),只要由在线仪表将其转换为相应的标准模拟量电信号,均可送入模拟量输入通道进行处理。 2)、模拟量输出(AO)通道: 模拟量输出通道一般是输出4~20mA(或1~5V)的连续的直流电流信号,用来控制各种直行程或角行程电动执行机构的行程,或通过调速装置(如各种变频调速器)控制各种电机的转速,亦可通过电-气转换器或电-液转换器来控制各种气动或液动执行机构,例如控制气动阀门的开度等等。 3)、开关量输入(DI)通道: 用来输入各种限位(限值)开关、继电器或电磁阀门连动触点的开、关状态;输入信号可以是交流电压信号、直流电压信号或干接点信号。 4)、开关量输出(DO)通道: 用于控制电磁阀门、继电器、指示灯、声报警器等只具有开、关两种状态的设备。输出形式一般为无源触点和有源OC门两种。 基本概述 DDC(Direct Digital Control)直接数字控制,通常称为DDC控制器。DDC系统的组成通常包括中央控制设备(集中控制电 脑、彩色监视器、键盘、打印机、不间断电源、通讯接口等)、现场DDC控制器、通讯网络、以及相应的传感器、执行器、调节阀等元器件。 它代替了传统控制组件,如温度开关、接收控制器或其它电子机械组件,及优于P LC等,特别成为各种建筑环境控制的通用模式。DDC系统是利用微信号处理器来做执行各种逻辑控制功能,它主要采用电子驱动,但也可用传感器连接气动机构。DD C系统的最大特点就是从参数的采集、传输到控制等各个环节均采用数字控制功能来实现。同时一个数字控制器可实现多个常规仪表控制器的功能,可有多个不同对象的控制环路。 工作原理 所有的控制逻辑均由微信号处理器,并以各控制器为基础完成,这些控制器接收传感器,常用融点或其它仪器传送来的输入信号,并根据软件程序处理这些信号,再输出信号到外部设备,这些信号可用于启动或关闭机器,打开或关闭阀门或风门,或按程序执行复杂的动作。这些控制器可用手操作中央机器系统或终端系统。 DDC控制器是整个控制系统的核心。是系统实现控制功能的关键部件。它的工作过程是控制器通过模拟量输入通道(AI)和开关量输入通道(DI)采集实时数据,并将模拟量信号转变成计算机可接受的数字信号(A/D转换),然后按照一定的控制规律进行运算,最后发出控制信号,并将数字量信号转变成模拟量信号(D/A转换),并通过模拟量输出通道(AO)和开关量输出通道(DO)直接控制设备的运行。 功能介绍 DDC控制器的软件通常包括基础软件、自检软件和应用软件三大块。其中基础软件是作为固定程序固化在模块中的通用软件,通常由DDC生产厂家直接写在微处理芯片上,不需要也不可能由其它人员进行修改。各个厂家的基础软件基本上是没有多少差别的。设置自检软件和保证DDC控制器的正常运行,检测其运行故障,同时也可便于管理人员维修。应用软件是针对各个空调设备的控制内容而编写的,因此这 东南大学自动化学院 实验报告 课程名称: D SP 原理及C 程序开发 第二次实验 实验名称:基于DSP 系统的实验——指示灯、拨码开关和定时器院(系):自动化专业:自动化 姓名:学号: 实验室:实验组别: 同组人员:实验时间:2012 年 4 月 18日 评定成绩:审阅教师: 第一部分实验:基于DSP 系统的实验——指示灯和拨码开关 一.实验目的 1. 了解ICETEK –F28335-A 评估板在TMS320F28335DSP 外部扩展存储空间上的扩展。 2. 了解ICETEK –F28335-A 评估板上指示灯和拨码开关扩展原理。 3. 学习在C 语言中使用扩展的控制寄存器的方法。 二.实验设备 计算机,ICETEK –F28335-A 实验箱(或ICETEK 仿真器+ICETEK–F28335-A 评估板+相关连线及电源)。 三.实验原理 1.TMS320F28335DSP 的存储器扩展接口 存储器扩展接口是DSP 扩展片外资源的主要接口,它提供了一组控制信号和地址、数据线,可以扩展各类存储器和存储器、寄存器映射的外设。 -ICETEK –F28335-A 评估板在扩展接口上除了扩展了片外SRAM 外,还扩展了指示灯、DIP 开关和D/A 设备。具体扩展地址如下: 0x180004- 0x180005:D/A 转换控制寄存器 0x180001:板上DIP 开关控制寄存器 0x180000:板上指示灯控制寄存器 -与ICETEK –F28335-A 评估板连接的ICETEK-CTR 显示控制模块也使用扩展空间控制主要设备: 208000-208004h :读-键盘扫描值,写-液晶控制寄存器 208002-208002h :液晶辅助控制寄存器 208003-208004h :液晶显示数据寄存器 2.指示灯与拨码开关扩展原理 计算机控制系统课后题答案 第一章计算机控制系统概述 习题与思考题 1.1什么是计算机控制系统?计算机控制系统较模拟系统有何优点?举例说明。 解答:由计算机参与并作为核心环节的自动控制系统,被称为计算机控制系统。与模拟系统相比,计算机控制系统具有设计和控制灵活,能实现集中监视和操作,能实现综合控制,可靠性高,抗干扰能力强等优点。例如,典型的电阻炉炉温计算机控制系统,如下图所示: 炉温计算机控制系统工作过程如下:电阻炉温度这一物理量经过热电偶检测后,变成电信号(毫伏级),再经变送器变成标准信号(1-5V或4-20mA)从现场进入控制室;经A/D转换器采样后变成数字信号进入计算机,与计算机内部的温度给定比较,得到偏差信号,该信号经过计算机内部的应用软件,即控制算法运算后得到一个控制信号的数字量,再经由D/A 转换器将该数字量控制信号转换成模拟量;控制信号模拟量作用于执行机构触发器,进而控制双向晶闸管对交流电压(220V)进行PWM调制,达到控制加热电阻两端电压的目的;电阻两端电压的高低决定了电阻加热能力的大小,从而调节炉温变化,最终达到计算机内部的给定温度。 由于计算机控制系统中,数字控制器的控制算法是通过编程的方法来实现的,所以很容易实现多种控制算法,修改控制算法的参数也比较方便。还可以通过软件的标准化和模块化,这些控制软件可以反复、多次调用。又由于计算机具有分时操作功能,可以监视几个或成十上百个的控制量,把生产过程的各个被控对象都管理起来,组成一个统一的控制系统,便于集中监视、集中操作管理。计算机控制不仅能实现常规的控制规律,而且由于计算机的记忆、逻辑功能和判断功能,可以综合生产的各方面情况,在环境与参数变化时,能及时进行判断、选择最合适的方案进行控制,必要时可以通过人机对话等方式进行人工干预,这些都是传统模拟控制无法胜任的。在计算机控制系统中,可以利用程序实现故障的自诊断、自修复功能,使计算机控制系统具有很强的可维护性。另一方面,计算机控制系统的控制算法是通过软件的方式来实现的,程序代码存储于计算机中,一般情况下不会因外部干扰而改变,因此计算机控制系统的抗干扰能力较强。因此,计算机控制系统具有上述优点。 1.2计算机控制系统由哪几部分组成?各部分的作用如何? 解答:计算机控制系统典型结构由数字控制器、D/A转换器、执行机构和被控对象、测量变送环节、采样开关和A/D转换环节等组成。 被控对象的物理量经过测量变送环节变成标准信号(1-5V或4-20mA);再经A/D转换器采样后变成数字信号进入计算机,计算机利用其内部的控制算法运算后得到一个控制信号的数字量,再经由D/A转换器将该数字量控制信号转换成模拟量;控制信号模拟量作用于执行机构触发器,进而控制被控对象的物理量,实现控制要求。 1.3应用逻辑器件设计一个开关信号经计算机数据总线接入计算机的电路图。 实验一 离散系统的时域分析 一、实验目的 1、掌握离散时间信号的MATLAB 表示; 2、信号运算; 3、差分方程的求解; 4、离散时间信号的卷积运算。 二、实验原理 1、离散时间信号 离散时间信号只在某些离散的瞬时给出函数值,而在其他时刻无定义。它是时间上不连续按一定先后次序排列的一组数的集合,称为时间序列,用x(n)表示,n 取整数代表时间的离散时刻。 在matlab 中用向量来表示一个有限长度的序列。 2、序列的类型 为了分析的方便,在数字信号处理中规定了一些基本的序列。 a) 单位采样序列 function [x,n]=impseq(n1,n2,n0) n=[n1:n2]; x=[(n-n0)==0]; 调用该函数 [x,n]=impseq(-2,8,2); stem(n,x) 00 10 ()00 1()0n n n n n n n n n δδ =?= ? ≠? =?-? ≠? 单位采样序列的另一种生成方法 n0=-2; n=[-10:10]; nc=length(n); x=zeros(1,nc); for i=1:nc if n(i)==n0 x(i)=1 end end stem(n,x) b) 单位阶跃序列 function [x,n]=stepseq(n1,n2,n0) n=[n1:n2]; x=[(n-n0)>=0]; 调用该函数 [x,n]=stepseq(-2,8,2); stem(n,x) 000 10()001() 0n n n n n n n n n εε >=?=? =?-? c) 实数指数序列 x(n)=an (运算符“.^”) n=[0:10]; x=0.9.^n; stem(n,x) d) 复数指数序列 n=[-10:10]; alpha=-0.1+0.3*j; x=exp(alpha*n); real_x=real(x); image_x=imag(x); mag_x=abs(x); phase_x=angle(x); subplot(2,2,1); stem(n,real_x) subplot(2,2,2); stem(n,image_x) subplot(2,2,3); stem(n,mag_x) subplot(2,2,4); stem(n,phase_x) ()()j n x n e αω+=(0.1j0.3)n x(n)e (10n 10) -+= -<< 计算机控制系统试卷一答案 一、简答题(每小题5分,共50分) 1、画出典型计算机控制系统的基本框图。答:典型计算机控制系统的基本框图如下: 2、根据采样过程的特点,可以将采样分为哪几种类型? 答 (1) 周期采样指相邻两次采样的时间间隔相等,也称为普通采样。 (2) 同步采样如果一个系统中有多个采样开关,它们的采样周期相同且同时进行采样,则称为同步采样。 (3) 非同步采样如果一个系统中有多个采样开关,它们的采样周期相同但不同时开闭,则称为非同步采样。 (4) 多速采样如果一个系统中有多个采样开关,每个采样开关都是周期采样的,但它们的采样周期不相同,则称多速采样。 (5) 随机采样若相邻两次采样的时间间隔不相等,则称为随机采样。 3、简述比例调节、积分调节和微分调节的作用。 答:(1)比例调节器:比例调节器对偏差是即时反应的,偏差一旦出现,调节器立即产生控制作用,使输出量朝着减小偏差的方向变化,控制作用的强弱取决于比例系数K P 。比例调节器虽然简单快速,但对 于系统响应为有限值的控制对象存在静差。加大比例系数K P 可以减小静差,但是K P 过大时,会使系统的 动态质量变坏,引起输出量振荡,甚至导致闭环系统不稳定。 (2)积分调节器:为了消除在比例调节中的残余静差,可在比例调节的基础上加入积分调节。积分调节具有累积成分,只要偏差e不为零,它将通过累积作用影响控制量u,从而减小偏差,直到偏差为零。 积分时间常数T I 大,则积分作用弱,反之强。增大T I 将减慢消除静差的过程,但可减小超调,提高稳定 性。引入积分调节的代价是降低系统的快速性。 (3)微分调节器:为加快控制过程,有必要在偏差出现或变化的瞬间,按偏差变化的趋向进行控制,使偏差消灭在萌芽状态,这就是微分调节的原理。微分作用的加入将有助于减小超调,克服振荡,使系统趋于稳定。 4、线性离散控制系统稳定的充要条件是什么? 答:线性离散控制系统稳定的充要条件是:闭环系统特征方程的所有根的模|z i |<1,即闭环脉冲传递函数的极点均位于z平面的单位圆内。 5、为什么会出现比例和微分饱和现象? 答:当给定值发生很大跃变时,在PID增量控制算法中的比例部分和微分部分计算出的控制增量可能比较大(由于积分项的系数一般小得多,所以积分部分的增量相对比较小)。如果该计算值超过了执行元件所允许的最大限度,那么,控制作用必然不如应有的计算值理想,其中计算值的多余信息没有执行就遗失了,从而影响控制效果。 二、已知系统的差分方程为(10分) 我们做的dsp实验是实验一,实验二,实验三!模板上只有1 3 !2要自己仿照实验一写! 不要弄错了!实验题目在另外一个共享表格里! 实验一数据存储实验 一、实验目的 1. 掌握ccs的使用 2. 掌握 tms320c54x 程序空间的分配; 3. 掌握 tms320c54x 数据空间的分配; 4. 能够熟练运用tms320c54x 数据空间的指令。 二、实验设备 计算机,ccs 3.1版软件,dsp仿真器,e300实验箱,dsp-54xp cpu板。 三、实验步骤与内容 1. 在进行 dsp实验之前,需先连接好仿真器、实验箱及计算机,连接方法如下所示: 2. e300 底板的开关sw4 的第1位置on,其余位置off。其余开关设置为off。 sw5全部置on;其余开关不做设置要求 3. 上电复位 在硬件安装完成后,确认安装正确、各实验部件及电源连接无误后,启动计算机,接通仿真器电源,此时,仿真器上的“红色指示灯”应点亮,否则dsp开发系统与计算机连接存在问题。 4. 运行ccs程序 1) 待计算机启动成功后,实验箱220v电源置“on”,实验箱上电 2) 启动ccs3.1,进入ccs界面后,点击“debug—connect” 3) 此时仿真器上的“绿色指示灯”应点亮,ccs正常启动,表明系统连接正常;否则仿真器的连接、jtag 接口或ccs 相关设置存在问题,这时需掉电检查仿真器的连接、jtag 接口连接是否正确,或检查ccs相关设置是否存在问题。 5. 成功运行ccs 程序后,首先应熟悉ccs的用户界面; 6. 学会在ccs环境下创建工程文件、添加程序文件、编写程序、编译、装载、调试,学习如何使用观察窗口等。 7. 用“project\open”打开“c:\ti5000\myprojects\01_mem\ mem.pjt”. 编译并装载“\ 01_mem\debug\mem.out” 8.用“edit”下拉菜单中的“memory/fill”编辑内存单元,参数设置如下图: 单击“ok”此时以0x1000 为起始地址的16个内存单元被修改成:0x0009 9.用“view”下拉菜单“memory”观察内存单元变化,输入要查看的内存单元地址,本实验要查看0x1000h~0x100fh 单元的数值变化,输入地址0x1000h; 单击“ok”如下图所示: 10. 点击“debug\go main”进入主程序,在程序中“加软件断点1”和“加软件断点2”处 施加软件断点。 11. 单击“debug\run”运行程序,也可以“单步”运行程序;当程序运行到“软件断点1” 处时,查看0x1000h~0x1007h单元的值变化, 12. 再单击“debug\run”,当程序运行到“软件断点2”处时,查看0x1008~0x100f 电子信息工程系实验报告 课程名称:现代DSP技术 成绩: 实验项目名称:I/O实验实验时间: 2011-10-18 指导教师(签名): 班级:电信082 姓名:李江水学号:810706210 实验目的 1、了解I/O口的扩展;掌握I/O口的操作方法; 2、熟悉在C语言中访问IO口的方法 3、了解数字量与模拟量的区别和联系。 实验设备 计算机,CCS 2.0版软件,DSP仿真器,实验箱。 实验原理 1、开关量输入输出单元 采用8位的数字量输入即由八拨码开关来控制LED灯的显示,当拨码开关都是低电平即都为0时,LED 灯全亮,反之则不亮。。 2、CPU初始化 第一步:时钟模式寄存器的初始化clkmd; 第二步:状态寄存器st0、st1的初始化,复位值为0x1800、0x6900; 第三步:处理器工作模式状态寄存器(PMST)的初始化; 第四步:软件等待状态寄存器、软件等待状态控制寄存器的初始化; 第五步:分区转换控制寄存器(BSCR)初始化。 第六步: *(unsigned int*)IMR=0x0;屏蔽所以中断,IMR为中断屏蔽寄存器。 *(unsigned int*)IFR=0xffff;IFR为中断标志寄存器,中断标志清0 实验步骤与结果分析 开关K9拨到右边,即仿真器选择连接右边的CPU:CPU2;启动CCS 2.0,在Project→Open菜单打开exp03_cpu2目录下面的工程文件“exp03.pjt”。用下拉菜单中Project-->Open,打开“exp03_cpu2\ exp03.pjt”,双击“Source”,可查看源程序。 在File→Load Program菜单下加载exp03_cpu2\debug目录下的exp03.out文件。 运行程序,分别调整开关量输入单元的开关K1~K8,观察LED指示灯LED1~LED8亮灭的变化,以及开关量输入和输出状态是否一致。关闭所有窗口,本实验完毕。 分别调整K1到K8的开关,当开关为低电平即为零时,LED灯亮,当开关为高电平即为1时,LED灯不亮。当K1、K3、K5、K7为0时,LED灯的显示如下图1。 计算机控制系统 一、简答题 1. 画出典型计算机控制系统的基本框图。(chap 1) 2. 根据采样过程的特点,可以将采样分为哪几种类型. (chap 2) 3. 简述比例调节、积分调节和微分调节的作用。(chap 5) 4. 线性离散控制系统稳定的充要条件是什么?(chap 4) 5. 为什么会出现比例和微分饱和现象?(chap 5) 6. 什么是振铃现象?如何消除振铃现象?(chap 6) 7. 连续控制系统相比,计算机控制系统具有哪些特点?(chap 1) 8. 简述计算机控制系统的一般控制过程。(chap 1) 9. 简述典型的计算机控制系统中所包含的信号形式。(chap 2) 10.增量型PID控制算式具有哪些优点?(chap 5) 11.如何利用试凑法调整PID算法的参数?(chap 5) 12.简述开关量光电耦合输入电路中,光电耦合器的作用。(chap 2) 13.什么是采样或采样过程?(chap 2) 14.线性离散系统的脉冲传递函数的定义是什么?(chap 3) 15.何为积分饱和现象?(chap 5) 16.等效离散化设计方法存在哪些缺陷?(chap 5) 17.何为最少拍设计?(chap 6) 18.使用光电隔离器件时,如何做到器件两侧的电气被彻底隔离?(chap 2) 19.什么是信号重构?(chap 2) 20.写出零阶保持器的传递函数,引入零阶保持器对系统开环传 递函数的极点有何影响?(chap 5) 21.阶跃响应不变法的基本思想是什么?(chap 5) 22.如何消除积分饱和现象?(chap 5) 23.给出常规的直接设计法或离散化设计法的具体设计步骤。(chap 6) 24.简述采样定理的基本内容。(chap 2) 25. 线性离散控制系统稳定的充要条件是什么?(chap 4) 26. 脉冲响应不变法的基本思想是什么?(chap 5) 27. 写出位置型与增量型PID 的差分控制算式。(chap 5) 28. 如何消除比例和微分饱和现象?(chap 5) 29.简要说明A/D 转换的基本原理有哪些?举例说明逐次逼近的基本过程?(chap 2) 30.简要说明D/A 转换器的梯形电阻法基本原理?(chap 2) 31.简要说明微分先行算法要解决的问题,并说明其是通过什么方法实现的?(chap 5) 二、计算题 1、已知系统的差分方程为 )2()1()(-=-+k r k y k y 输入信号是 ? ??<≥=0001)(k k k r DSP实验报告 电子111班 刘卓 112099 同组人:张顺 112108 指令实验 一、实验目的 1、了解DSP的结构及引脚功能; 2、掌握DSP的基本指令。 二、实验要求 了解怎样对DSP进行简单的编程操作、运算控制等基本汇编语言及算术语言、实验测试及除错验证。 三、实验步骤 见教材342页。 四、实验结果 1、直观结果 .title "ex1" .mmregs .def _c_int00 DAT0 .SET 60H DAT1 .SET 61H DAT2 .SET 62H DAT3 .SET 63H .text ADD3 .MACRO P1,P2,P3,ADDRP LD P1,A ADD P2,A ADD P3,A STL A,ADDRP .ENDM _c_int00:B start start: LD #004h,DP ;DP=0004,ST0=1804 STM #1000h,SP ;SP=1000 SSBX INTM ;INTM=1 bk0: ST #0012h,DAT0 ;D(0x0260)=0x0012 LD #0023h,A ;A=0000000023 ADD DAT0,A ;A=0000000035,ST0=1004,C=0 NOP NOP bk1: ST #0054h,DAT0 ;D(0x0260)= 0x0054 LD #0002h,A ;A=0000000002 SUB DAT0,A ;A=FFFFFFFFAE NOP NOP bk2: ST #0345h,DAT0 ;D(0x0260)=0x0345 STM #0002h,T ;T=0002DSP硬件实验报告北邮
数字控制理论及应用(讲稿)第二章 数字控制系统的组成
DDC控制器 直接数字控制系统(Direct Digital Control简称DDC),
DSP技术及课程设计实验报告二(精)
计算机控制系统答案
DSP实验报告word版
计算机控制系统试题及答案
DSP实验报告模版
DSP实验报告一
计算机控制系统试题
DSP实验报告
相关主题
文本预览