
中图分类号:T M36+
1 文献标识码:A 文章编号:100126848(2007)0720036204
无位置传感器无刷直流电动机转子位置检测新技术
贾歆莹,孙 敏,谷志敏,羊 彦
(西北工业大学,西安710072)
摘 要:针对反电势法在电动机转子位置检测时存在迭加干扰和需要误差补偿等缺点,提出了一种新的检测方法,即在P WM 导通期间对电机不导通相绕组端电压进行采样,判断绕组反电势过零点时刻,并结合位置预测方法对过零点时刻进行校正,推算逆变器中功率器件的切换时间。反电势检测电路设计简单,容易实现。实验证明,本文方案检测精度高、抗干扰能力强、可靠性高。
关键词:无位置传感器;无刷直流电动机;位置检测;反电动势
New Technology of Rotor Positi on D etecti on for Sen sorless Brushless DC M otor
J I A Xin 2ying,S UN M in,G U Zhi 2m in,Y ANG Yan (North western Polytechnical University,Xi πan 710072,China )
ABSTRACT:This paper p resents a ne w method of r ot or positi on detecti on because the back 2E MF meth 2od has s ome shortcom ings such as str ong interference,needing compensati on,and s o on .
The original
back 2E MF method is i m p r oved .W e obtain the right ti m e when back 2E MF reaches the zer o point thr ough sa mp ling non 2conducted phase voltage during P WM 2on phrase .W e conduct e mendati on on the detecti on data by means of state p redict,and then conclude the s witch 2on ti m e of power transist or .A ls o,it is si m p le for hard ware and easy f or realizati on .A s the results show,the method p r oves t o be high p reci 2si on,str ong anti 2interference ability and high dependability .
KEY WO R D S:Positi on sens orless;BLDC M;Positi on detecti on;Back 2E MF
收稿日期:2006212228
0 引 言
无刷直流电机无传感器控制,转子位置检测有多种方法
[123]
,较多的还是反电势法。这种方法简
单、实用,但是由于反电势迭加有由逆变器输出的脉宽调制波形和开关过程的尖峰干扰,因此获得反电势过零点信息的关键问题就是如何滤除反电势中迭加的强干扰脉冲。通常的方法是用模拟低通滤波器将混合信号滤波。但这种方法会产生较大的相移,通过补偿的方法很难校正
[4]
。本文采用的转子位置
检测方法成功地解决了上述干扰问题,使切换时间更准确,提高了电机的运行效率。
1 反电势法检测转子位置原理
电机采用定子绕组星形连接,两两导通,三
相六状态的P WM 调制方式。在与感应电势同相位的180°电角度中,每相导通时间只有120°电角度,一个周期内共有6种导通方式,每一种模式与转子对应相位同步,如表1所示。对各种P WM 调制方式进行对比后,选择各开关管前60°恒通、后60°P WM 调制方式,能够更好地检测到反电势过零点。
表1 导通模式
导通模式上半桥
U
V
W
下半桥
X
Y
Z
换相
模式
0开
关关关开关U →V 模式1开关关关关开U →W 模式2关开关关关开V →W 模式3关开关开关关V →U 模式4关关开开关关W →U 模式
5
关关开关开关
W →V
在一个运转周期里(360°电角度),电机的三个绕组产生的反电势共有6个过零点,每两个过零点之间相差60°电角度,与之对应的转子位置被三相电
—
63—
机的6个反电势过零点分为6种模式[526]。检测到过零点30°电角度后进行模式切换,既由一种导通模式转换成下一种导通模式,每种模式持续时间为60°电角度[1]。具体导通模式和控制时序如表1和图1所示。图中实线、点划线及虚线分别代表U、V、W 三相的反电势波形,对应着前60°恒通、后60°P WM 调制方式的驱动波形及绕组的电压波形。无刷直流电机无位置传感器控制的主要问题就是能否准确地检测到反电势过零点的时刻,从而获得电机转子的准确位置,在检测到反电势过零点30°电角度后根据确定的时序对三相功率器件进行切换。
图1 无刷直流电机控制时序
2 改进的反电势法位置检测
目前多采用低通滤波器对相电压进行滤波从而得到反电势过零点信息。这种方法往往使反电势产生相移,而且这种相移因运行频率的不同而差异很大。虽然也提出了一些相位修正的方法[6],但是检测算法变得很复杂。本文以反电势法为基础,舍弃了传统的模拟电路检测电机反电势的方法,提出了一种改进的反电势法。
从图1可以看到,无刷直流电机在每一个导通模式范围内(60°电角度)只有两相绕组处于导通状态,而第三相处于非导通状态。其端电压等于该相绕组的感应电势。对于永磁直流无刷电机而言,感应电势近似等于反电势,而反电势的过零点就发生在该相绕组非导通期间。此时通过检测该相的端电压可以间接地检测到该相反电势的过零点时刻,类似的可以检测其他两相的全部过零点,从而确定换相时序。文本就是在其它两相绕组导通的情况下用单片机对非导通相绕组进行反
电势信号采样并分析,滤除强干扰脉冲,准确地识别出反电势过零点时刻。
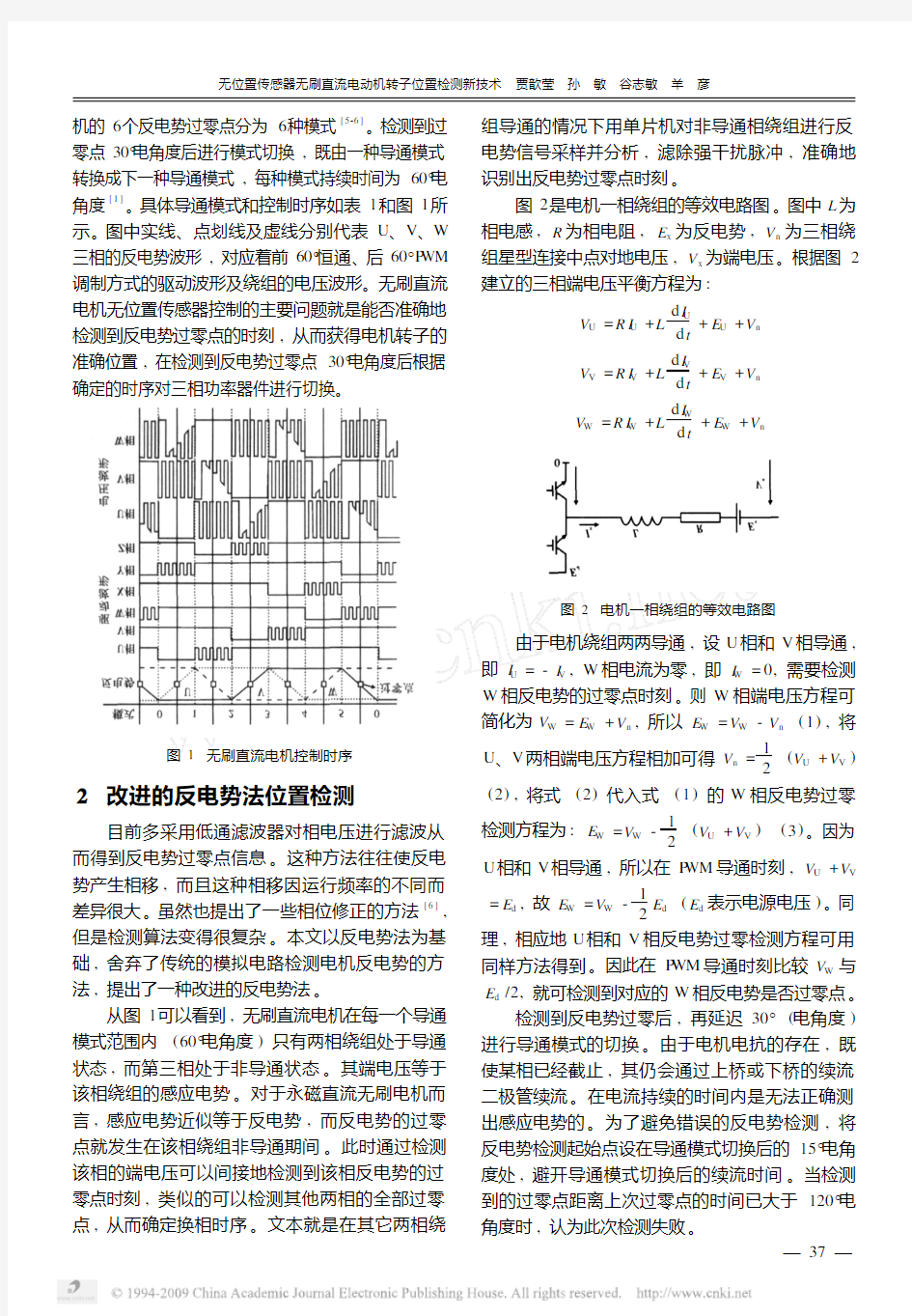
图2是电机一相绕组的等效电路图。图中L为相电感,R为相电阻,E
x
为反电势,V
n
为三相绕
组星型连接中点对地电压,V
x
为端电压。根据图2建立的三相端电压平衡方程为:
V U=R I U+L
d I U
d t
+E U+V n
V V=R I V+L
d I V
d t
+E V+V n
V W=R I W+L
d I W
d t
+E W+V
n
图2 电机一相绕组的等效电路图
由于电机绕组两两导通,设U相和V相导通,
即I
U
=-I V,W相电流为零,即I W=0,需要检测W相反电势的过零点时刻。则W相端电压方程可
简化为V
W
=E W+V n,所以E W=V W-V n(1),将U、V两相端电压方程相加可得V n=
1
2
(V
U
+V V) (2),将式(2)代入式(1)的W相反电势过零
检测方程为:E
W
=V W-
1
2
(V
U
+V V)(3)。因为U相和V相导通,所以在P WM导通时刻,V U+V V =E d,故E W=V W-
1
2
E d(E d表示电源电压)。同理,相应地U相和V相反电势过零检测方程可用
同样方法得到。因此在P WM导通时刻比较V
W
与E d/2,就可检测到对应的W相反电势是否过零点。
检测到反电势过零后,再延迟30°(电角度)进行导通模式的切换。由于电机电抗的存在,既使某相已经截止,其仍会通过上桥或下桥的续流二极管续流。在电流持续的时间内是无法正确测出感应电势的。为了避免错误的反电势检测,将反电势检测起始点设在导通模式切换后的15°电角度处,避开导通模式切换后的续流时间。当检测到的过零点距离上次过零点的时间已大于120°电角度时,认为此次检测失败。
—
7
3
—
反电势过零点的检测仅在不导通相进行,并不是连续检测,只在P WM 导通期间进行检测,且延迟一段时间避开功率管开关干扰。为了进一步提高检测的可靠性,可在P WM 导通期间多次采样,当连续N 次检测到反电势过零点
[7]
,则认为
正确检测到了反电势的过零点,如图3
。
图3 延时采样
如图4所示,文中对永磁无刷直流电机控制系统的反电势过零点检测可以分为如下几个步骤:
(1)反电势过零点的检测仅在不导通相进行,并在该相功率管关断15°电角度后开始。(2)在规定的模式检测时刻,并不是连续检测,仅在P WM 导通期间进行,且延迟一段时间避开功率管开关干扰。(3)当检测到反电势过零点,延迟30°电角度后对逆变器导通模式进行转换。(4)若在120°电角度范围内尚未检测到期望模式,认为丢失了位置信息,采用过零点预测估计值进行插值,维持电机正常运转。
图4 位置检测时序图
由于采用了不同于传统方法的新的过零点检测技术,使用全数字化方法,舍弃了传统的模拟滤波、比较电路,因而电路设计十分简洁
[4]
。系
统采用的反电势法检测电路如图5。图中画出了4个检测通道,分别是U 、V 、W 三相反电动势和逆变器直流侧电压检测。其电路原理其实是简单的电阻分压网络,主要是为了将较高的信号电压降低,满足单片机AD 转换输入要求。在分压网络之后,还接了一级RC 滤波电路。该电路设计的时间常数很小,主要是为了减小P WM 开关瞬间产生的脉冲尖峰干扰,提高系统的可靠性,对反电动势信号的影响非常小,可以忽略不计。4个钳位二极管,防止
AD 输入端电压过高损坏单片机端口。
图5 反电势检测电路原理图
3 位置预测估计方法原理
当在120°电角度范围内尚未检测到期望模式时,系统认为过零信息丢失,这样将会造成错误控制。利用位置预测估计法可以解决这一问题,即使顺利检测到过零点信号,也可以利用预测估计值对其进行校正
[8]
。
数学模型的建立:电机运行方向确定以后,其运行方式有:匀速运动、匀加速运动、匀减速运动。因此,可利用二阶微分方程描述其运行规律。可以建立如下方程组:
状态方程:γk =γk -1+T γk -1+
T
2
2¨γk -1
(4)观测方程:Z k =γk +n k (5)估计方程:γk =Z k
(6)变化速率: γ^k -1
=Z k -Z k -1T +T 2¨γ^k -1
(7)加速度:¨γ^k -1
=1T
Z k -Z k -1T
-Z k -1-Z k -2
T (8)
式中,γk 为第k 次过零时间;γk -1则为第k -1次
过零时间; γk -1、¨γk -1分别为过零时间的变化速率
和加速度;z k 为通过反电势检测到的第k 次过零时
间;^γ为通过z k 对γk 的估计值,在忽略噪声n k 的情况下,可以认为^γk =z k ; γ^k -1、¨γ^k -1分别表示 γk -1、¨γk -1的估计值;^γ
k +1/k 表示利用第k 次的^γk 对第k +1次的预测值。在忽略了噪声的情况下,利用公式(6)、式(7)、式(8),式(9)可以简化为:
^γ(k +1)/k =3z k -3z k -1+z k -2
(10)
这种算法的流程如图6所示。该算法最大优点是可以补偿反电势检测时丢失的信息,尤其是在电机起动阶段,通过此方法可以大大提高从开环切换到闭环的成功率。
—
83—
图6 位置预测估计流程图
4 实 验
本文所设计的无位置传感器无刷直流电机控制系统采用德国I nfineon 最新推出的XC164C M 专用单片机实现控制软件,并对I P M 智能功率模块进行驱动。在115k W 的空调专用直流变频压缩机进行了实验。在实验中,输入交流电压范围160V ~270V,转速控制范围300r/m in ~7800r/m in,转速控制误差±15r/m in 。图7给出了电机端电压、相电流的运行曲线
。
图7 电机运行时的端电压、相电流波形
5 结 论
在本文方法中,反电势过零点信息的获得是利用改进的反电势检测与预测估计两种方法同时进行,互相弥补、互相校正,较好地解决了检测过程的干扰问题。利用预测估计方法不仅解决了位置检测失效后功率管切换问题,而且对反电势的切换时间进行了校正,使切换时间更准确,从而提高了检测精度。实验证明,这种位置检测方法能够在强干扰环境中精确检测到压缩机转子位置,提高了系统的控制精度、抗干扰能力和可靠性,控制效果理想。
参考文献
[1] 张琛.无刷直流电机原理及应用[M ].北京:机械工业出
版社,2001.
[2] Moreira J C .
I nderict Sensing f or Rot or Flux Positi on of Per ma 2nentMagnet AC Mot or Operating in a W ide Speed Range [J ].
Conf .Rec .
I EEE I A S Ann,M tg .,1994:4012407.
[3] Ogas wara S .An App r oach t o Positi on Sens orlessD rive f orB rush 2
less DC Mot ors [J ].I EEE Trans .
I ndus .App li .,1991,27
(5):9282933.
[4] 程相权,王远钢.无传感器直流无刷电机系统中的滤波器
设计[J ].微电机,2001,34(1):21223.
[5] 林明耀,王永.反电势法无位置传感器直流无刷电机最佳
换相逻辑分析[J ].中小型电机,2003,30(5).
[6] 张相军.直流无刷电机无位置传感器控制中反电动势过零
检测及修正[J ].电气传动,2001(2).
[7] 宋海龙.无刷直流电机的无位置传感器控制[J ].电机与
控制学报,2002,(3):2082212.
[8] 羊彦,景占荣,陈文斌,等.无位置传感器直流无刷电机
转子位置检测新方法的研究[J ].电气传动,2004,34
(1):328.
作者简介:贾歆莹,硕士生,从事无刷直流电机及控制技术研究。
—
93—
实验一直流电动机起动实验 一、实验目的理解直流电机的工作原理,测试直流电动及直接起动的波形。说明负载转矩、转速、电流、电磁转矩之间为何具有相应的对应关系。 二、实验的主要内容 仿真一台直流并励电动机的起动过程。电动机参数为: PN =17kW, U N = 220V, n0= 3000r/min,电枢回路电阻R a =0. 0870,电枢电感La =0. 0032H,励磁回路电阻R F=181.50,电机转动惯量J=0.76 kg ?m2。 三、实验的基本原理直流电动机刚与电源接通的瞬间,转子尚未转动起来时,他励和串励电动机的电枢电流以及并励和复励电动机的输入电流称为起动电流,这时的电磁转矩称为起动转矩。一般情况下,在额定电压下直接起动时,起动电流可达电枢电流额定值的10~20倍,起动转矩也能达到额定转矩的10~20倍,这样的起动电流是换向所不允许的,而且过大的起动转矩会使电动机和它所拖动的生产机械遭受突然的巨大冲击,以致损坏传动机械和生产机械。由此可见,除了额定功率在数百瓦以下的微型直流电动机,因电枢绕组导线细、枢电阻大以及转动惯量又比较小,可以直接起动以外,一般的直流电动机是不允许采用直接起动的。 四、实验步骤 1) 建立并激电动机的仿真模型:直流电动机DCmotor 的电枢和励磁并联后由直流电源DC 供电,用Step 模块给定电动机的负载转矩,在DCmotor 的m 端连接了Demux 模块,将m 端输出的4 个信号分为4 路,以便通过示波器Scope 观察,m 端输出的转速单位为rad/s,这里使用了一个放大器(Gain), 将rad/s 转换为习惯的r/min,变换系数为:k=60/2 π =9.55。 2) 计算电动机参数: 励磁电流 励磁电感在恒定磁场控制时可取“ 0” 电枢电阻 R a =0.0870 电枢电感估算
永磁无刷直流电动机的基本工作原理 无刷直流电动机由电动机主体和驱动器组成,是一种典型的机电一体化产品。 1. 电动机的定子绕组多做成三相对称星形接法,同三相异步电动机十分相似。电动机的转子上粘有已充磁的永磁体,为了检测电动机转子的极性,在电动机内装有位置传感器。驱动器由功率电子器件和集成电路等构成,其功能是:接受电动机的启动、停止、制动信号,以控制电动机的启动、停止和制动;接受位置传感器信号和正反转信号,用来控制逆变桥各功率管的通断,产生连续转矩;接受速度指令和速度反馈信号,用来控制和调整转速;提供保护和显示等等。 无刷直流电动机的原理简图如图一所示: 永磁无刷直流电动机的基本工作原理 主电路是一个典型的电压型交-直-交电路,逆变器提供等幅等频5-26KHZ调制波的对称交变矩形波。 永磁体N-S交替交换,使位置传感器产生相位差120°的U、V、W方波,结合正/反转信号产生有效的六状态编码信号:101、100、110、010、011、001,通过逻辑组件处理产生T1-T4导通、T1-T6导通、T3-T6导通、T3-T2导通、T5-T2导通、T5-T4导通,也就是说将直流母线电压依次加在A+B-、A+C-、B+C-、B+A-、C+A-、C+B-上,这样转子每转过一对N-S极,T1-T6功率管即按固定组合成六种状态的依次导通。每种状态下,仅有两相绕组通电,依次改变一种状态,定子绕组产生的磁场轴线在空间转动60°电角度,转子跟随定子磁场转动相当于60°电角度空间位置,转子在新位置上,使位置传感器U、V、W按约定产生一组新编码,新的编码又改变了功率管的导通组合,使定子绕组产生的磁场轴再前进60°电角度,如此循环,无刷直流电动机将产生连续转矩,拖动负载作连续旋转。正因为无刷直流电动机的换向是自身产生的,而不是由逆变器强制换向的,所以也称作自控式同步电动机。 2. 无刷直流电动机的位置传感器编码使通电的两相绕组合成磁场轴线位置超前转子磁场轴线位置,所以不论转子的起始位置处在何处,电动机在启动瞬间就会产生足够大的启动转矩,因此转子上不需另设启动绕组。 由于定子磁场轴线可视作同转子轴线垂直,在铁芯不饱和的情况下,产生的平均电磁转矩与绕组电流成正比,这正是他励直流电动机的电流-转矩特性。 电动机的转矩正比于绕组平均电流: Tm=KtIav (N·m) 电动机两相绕组反电势的差正比于电动机的角速度: ELL=Keω (V) 所以电动机绕组中的平均电流为: Iav=(Vm-ELL)/2Ra (A) 其中,Vm=δ·VDC是加在电动机线间电压平均值,VDC是直流母线电压,δ是调制波的占空比,Ra为每相绕组电阻。由此可以得到直流电动机的电磁转矩: Tm=δ·(VDC·Kt/2Ra)-Kt·(Keω/2Ra) Kt、Ke是电动机的结构常数,ω为电动机的角速度(rad/s),所以,在一定的ω时,改变占空比δ,就可以线性地改变电动机的电磁转矩,得到与他励直流电动机电枢电压控制相同的控制特性和机械特性。
说明书摘要 本发明公开一种永磁同步电机转子初始位置的判断方法,步骤是:首先利用脉振高频电压注入法得到初次估计的转子位置,然后在初次估计的交轴上注入一个正方向扰动信号,再估计转子位置,根据估计得到的转速方向判断磁极极性,得到电机转子初始位置。此种方法可解决脉振高频电压信号注入法检测转子初始位置时磁极极性的收敛问题,无需在直轴上注入正负方向的脉冲电流,可以有效地实现转子初始位置估算。
摘要附图
1、一种永磁同步电机转子初始位置的判断方法,其特征在于包括如下步骤: (1)在??d q -估计同步旋转坐标系的?d 轴上注入高频电压信号?cos()d mh h u U t ω=,给定?q 轴电压?0q u =; (2)检测电机的两相电流,并经过Clarke 和Park 坐标系变换,得到??d q -估计同步旋转坐标系的?q 轴电流?q i ,并依照以下步骤估计转子的位置和转速:首先,将检测得到的?q 轴电流?q i 乘以调制信号cos()t h u t ω=;然后,对相乘后所得的信号低通滤波,得到?q 轴电流?q i 的幅值信号()f θ?;最后,对该幅值信号()f θ?进行PI 调节,得到估计转速?ω ,对估计转速?ω积分得到估计的转子位置; (3)重复步骤(2),直至估计的转子位置收敛为一恒定值,即为初次估计 的转子位置?first θ; (4)在??d q -估计同步旋转坐标系的?d 轴上注入高频电压信号?cos()d mh h u U t ω=,在?q 轴注入一个正方向扰动信号,重复步骤(2),直至电机转过一定角度γ,0γ>; (5)根据步骤(3)估计得到的转速方向判断磁极极性,当转速为正时,收 敛的磁极极性为N 极,转子初始位置??=initial first θθ;当转速为负时,收敛的磁极极性为S 极,转子初始位置??=initial first θθπ+。 2、如权利要求1所述的一种永磁同步电机转子初始位置的判断方法,其特 征在于:所述步骤(1)中,采用转子的估计位置?θ进行Park 逆变换,获得实际两相静止坐标系下电压的给定值?u α和?u β。
物理八年级人教新课标实 验安装直流电动机模型 Prepared on 22 November 2020
实验报告 实验:安装直流电动机模型 初三( )班姓名:_____________ 座号:_______ _____年___月___日 实验目的:1.安装直流电动机模型。 2.研究直流电动机的转动方向和转速。 实验器材:直流电动机模型(散件),干电池组、滑动变阻器、开关、导线若干。 实验步骤:1.安装直流电动机模型。 2.画出直流电动机模型与变阻器、电源、开关、组成的串联电路 图。 3.按电路图连接电路。 4.经检查无误后,闭合开关,调节滑动变阻器至合适位置,观察电动机线圈转动情况。 5.按下表进行实验,结论填入表中。 源电压,否则容易把电 动机模型烧坏。
2.为了使线圈在转动到平衡位置时,适时地改变线圈中电流方向,必须十分注意通电线圈 和换向器安装是否符合要求,应该使换向器两个铜质半环的绝缘处(断开处)的边线与线圈平面垂直。 3.电刷和换向器安装的松紧要适当,太松会接触不良形成开路,太紧会使电刷与铜质半环 间摩擦过大妨碍线圈的转动。 4.若接通电源后,电动机模型不转动,则可能有以下故障: ①滑动变阻器的连入阻值过大。②电刷与换向器间接触不良。③线圈正好处于平衡位置。 ④电磁铁没有磁性(或磁体没有放置好,磁场较弱)⑤电路的其它部分开路。☆) 实验报告 实验:安装直流电动机模型 初三( )班姓名:_____________ 座号:_______ _____年___月___日 实验目的:1.安装直流电动机模型。 2.研究直流电动机的转动方向和转速。 实验器材:直流电动机模型(散件),干电池组、滑动变阻器、开关、导线若干。 实验步骤:1.安装直流电动机模型。 2.画出直流电动机模型与变阻器、电源、开关、组成的串联电路 图。 3.按电路图连接电路。 4.经检查无误后,闭合开关,调节滑动变阻器至合适位置,观察电动机线圈转动情况。 5.按下表进行实验,结论填入表中。
无刷直流电机的组成及工作原理 2.1 引言 直流无刷电动机一般由电子换相电路、转子位置检测电路和电动机本体三部分组成,电子换相电路一般由控制部分和驱动部分组成,而对转子位置的检测一般用位置传感器来完成。工作时,控制器根据位置传感器测得的电机转子位置有序的触发驱动电路中的各个功率管,进行有序换流,以驱动直流电动机。下文从无刷直流电动机的三个部分对其发展进行分析。 2.2 无刷直流电机的组成 2.2.1 电动机本体 无刷直流电动机在电磁结构上和有刷直流电动机基本一样,但它的电枢绕组放在定子上,转子采用的重量、简化了结构、提高了性能,使其可*性得以提高。无刷电动机的发展与永磁材料的发展是分不开的,磁性材料的发展过程基本上经历了以下几个发展阶段:铝镍钴,铁氧体磁性材料,钕铁硼(NdFeB)。钕铁硼有高磁能积,它的出现引起了磁性材料的一场革命。第三代钕铁硼永磁材料的应用,进一步减少了电机的用铜量,促使无刷电机向高效率、小型化、节能的方向发展。 目前,为提高电动机的功率密度,出现了横向磁场永磁电机,其定子齿槽与电枢线圈在空间位置上相互垂直,电机中的主磁通沿电机轴向流通,这种结构提高了气隙磁密,能够提供比传统电机大得多的输出转矩。该类型电机正处于研究开发阶段。 2.2.2 电子换相电路 控制电路:无刷直流电动机通过控制驱动电路中的功率开关器件,来控制电机的转速、转向、转矩以及保护电机,包括过流、过压、过热等保护。控制电路最初采用模拟电路,控制比较简单。如果将电路数字化,许多硬件工作可以直接由软件完成,可以减少硬件电路,提高其可靠性,同时可以提高控制电路抗干扰的能力,因而控制电路由模拟电路发展到数字电路。 驱动电路:驱动电路输出电功率,驱动电动机的电枢绕组,并受控于控制电路。驱动电路由大功率开关器件组成。正是由于晶闸管的出现,直流电动机才从有刷实现到无刷的飞跃。但由于晶闸管是只具备控制接通,而无自关断能力的半控性开关器件,其开关频率较低,不能满足无刷直流电动机性能的进一步提高。随着电力电子技术的飞速发展,出现了全控型的功率开关器件,其中有可关断晶体管(GTO)、电力场效应晶体管(MOSFET)、金属栅双极性晶体管IGBT 模块、集成门极换流晶闸管(IGCT)及近年新开发的电子注入增强栅晶体管(IEGT)。随着这些功率器件性能的不断提高,相应的无刷电动机的驱动电路也获得了飞速发展。目前,全控型开关器件正在逐渐取代线路复杂、体积庞大、功能指标低的普通晶闸管,驱动电路已从线性放大状态转换为脉宽调制的开关状态,相应的电路组成也由功率管分立电路转成模块化集成电路,为驱动电路实现智能化、高频化、小型化创造了条件。 2.2.3 转子位置检测电路
实验二直流并励电动机 一.实验目的 1.掌握用实验方法测取直流并励电动机的工作特性和机械特性。 2.掌握直流并励电动机的调速方法。 二.预习要点 1.什么是直流电动机的工作特性和机械特性? 2.直流电动机调速原理是什么? 三.实验项目 1.工作特性和机械特性 保持U=U N和I f=I fN不变,测取n、T2、n=f(I a)及n=f(T2)。 2.调速特性 (1)改变电枢电压调速 保持U=U N、I f=I fN=常数,T2=常数,测取n=f(Ua)。 (2)改变励磁电流调速 保持U=U N,T2 =常数,R1 =0,测取n=f(I f)。 (3)观察能耗制动过程 四.实验设备及仪器 1.NMEL系列电机教学实验台的主控制屏。 2.电机导轨及涡流测功机、转矩转速测量(NMEL-13)。 3.可调直流稳压电源(含直流电压、电流、毫安表) 4.直流电压、毫安、安培表(NMEL-06)。 5.直流并励电动机。M03 (U N=220v,I N=1.1A,n N=1600) 6.波形测试及开关板(NMEL-05)。 7.三相可调电阻900Ω(MEL-03)。 五.实验方法 1.并励电动机的工作特性和机械特性。 实验线路如图1-6所示 U1:可调直流稳压电源 R1、R f:电枢调节电阻和磁场调节电阻, 位于NMEL-09。
电机旋转,并调整电机的旋转方向,使电机正转。 b.直流电机正常起动后,将电枢串联电阻R1调至零,调节直流可调稳压电源的输出至220V,再分别调节磁场调节电阻R f和“转矩设定”电位器,使电动机达到额定值:U=U N=220V,Ia=I N,n=n N=1600r/min,此时直流电机的励磁电流I f=I fN(额定励磁电流)。 c.保持U=U N,I f=I fN不变的条件下,逐次减小电动机的负载,即逆时针调节“转矩设定”电位器,测取电动机电枢电流I a、转速n和转矩T2,共取数据7-8组填入表1-8中。表U=U N=221V I f=I fN=56.1mA I f2=1.1 A
无刷直流永磁电动机设计实例 一. 主要技术指标 1. 额定功率:W 30P N = 2. 额定电压:V U N 48=,直流 3. 额定电流:A I N 1< 3. 额定转速:m in /10000r n N = 4. 工作状态:短期运行 5. 设计方式:按方波设计 6. 外形尺寸:m 065.0036.0?φ 二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P ' 直流电动机 W P K P N N m i 48.4063 .030 85.0'=?= = η,按陈世坤书。 长期运行 N i P P ?'' += 'ηη321 短期运行 N i P P ?'' += 'η η431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比(L/D )λ′=2
7.计算电枢内径 m n B A P D N s i i i 233 11037.110000 255.0110008.048 .401.61.6-?=?????=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-?= 8. 气隙长度m 3107.0-?=δ 9. 电枢外径m D 211095.2-?= 10. 极对数p=1 11. 计算电枢铁芯长 m D L i 221108.2104.12--?=??='='λ 根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-? 12. 极距 m p D i 22 1 102.22 104.114.32--?=??==πτ 13. 输入永磁体轴向长m L L m 2108.2-?== 三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22 1 10733.06 104.114.3--?=??==π 3. 槽形选择 梯形口扇形槽,见下图。 4. 预估齿宽: m K B tB b Fe t t 2210294.096 .043.155 .010733.0--?=???==δ ,t B 可由 设计者经验得1.43T ,t b 由工艺取m 210295.0-? 5. 预估轭高: m B K B a K lB h j Fe i Fe j j 211110323.056 .196.0255 .08.02.222-?=????=≈Φ= δδτ
直流无刷电动机及其调速控制 1.直流无刷电动机的发展概况与应用 有刷直流电动机从19世纪40年代出现以来,以其优良的转矩控制特性,在相当长的一段时间内一直在运动控制领域占据主导地位。但是,有机械接触电刷-换向器一直是电流电机的一个致命弱点,它降低了系统的可靠性,限制了其在很多场合中的使用。为了取代有刷直流电动机的机械换向装置,人们进行了长期的探索。早在1917年,Bolgior就提出了用整流管代替有刷直流电动机的机械电刷,从而诞生了无刷直流电机的基本思想。 1955年美国的D.Harrison等首次申请了用晶体管换相线路代替有刷直流电动机的机械电刷的专利,标志着现代无刷直流电动机的诞生。无刷直流电动机的发展在很大程度上取决于电力电子技术的进步,在无刷直流电动机发展的早期,由于当时大功率开关器件仅处于初级发展阶段,可靠性差,价格昂贵,加上永磁材料和驱动控制技术水平的制约,使得无刷直流电动机自发明以后的一个相当长的时间内,性能都不理想,只能停留在实验室阶段,无法推广使用。1970年以后,随着电力半导体工业的飞速发展,许多新型的全控型半导体功率器件(如GTR、MOSFET、IGBT等)相继问世,加之高磁能积永磁材料(如SmCo、NsFeB)陆续出现,这些均为无刷直流电动机广泛应用奠定了坚实的基础。在1978年汉诺威贸易博览会上,前联邦德国的MANNESMANN公司正式推出了MAC无刷直流电动机及其驱动器,引起了世界各国的关注,随即在国际上掀起了研制和生产无刷直流系统的热潮,这业标志着无刷直流电动机走向实用阶段。 随着现代永磁材料和相关电子元器件的性能不断提高,价格不断下降,无刷电动机的到了快速发展,并被广泛应用于各个领域,例如,在数控机床、工业机器人以及医疗器械、仪器仪表、化工、轻纺机械和家用电器等小功率场合,计算
中图分类号:T M36+ 1 文献标志码:A 文章编号:100126848(2009)0320036203 三槽无刷直流电动机 吕学文,吕瑰丽,范 瑜 (北京交通大学电气工程学院,北京 100044) 摘 要:介绍了分数槽无刷直流电动机的优点,分析了三槽无刷直流电动机的特点、结构、控制系统与工作原理和控制方法等。实验结果表明,系统的硬件及控制策略设计合理,具有良好的运行性能。 关键词:无刷直流电机;反电势法;实验 Three 2teeth Slotted Brushless D i rect Curren tM otor LV Xue 2wen,LV Gui 2li,F AN Yu (Electrical Engineering School of Beijing J iaot ong University,Beijing 100044,China ) Abstract:The advantage of fracti onal sl otted brushless direct current mot or (BLDC Mot or )was intr o 2duced .Characters of three 2teeth sl otted BLDC mot or were analyzed .The structure,operati on p rinci p le and contr ol strategy of contr ol syste m were researched . It was shown that the hardware and contr ol strate 2 gy of this syste m were reas onable and good running perf or mance .Key W ords:B rushless DC mot or;Back E MF method;Ex peri m ent 收稿日期:2008203205 0 引 言 无刷直流电动机(BLDC M )既具备交流电动机的结构简单、运行可靠、维护方便等一系列优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好的特点,故在当今国民经济的诸多领域,如医疗器械、仪器仪表、化工、轻纺以及家用电器等方面的应用日益普及。在有些领域,如家用小电器、电动玩具等,出于成本和制造工艺的考虑,希望所用电机越简单越好,因此三槽直流电机曾经风靡一时,但是由于传统的直流电机都采用电刷机械方法换向,因此会产生火花和电磁干扰,使电机寿命短,限制了其应用。文献[1]中提及的三槽无刷直流电机的方案给人们很大 启发。三槽无刷直流电机既具备三槽直流电机的结构简单和制造方便的特点,又可以避免其机械换向产生的火花、电磁干扰等缺点,改善了其性能,扩大了其应用领域。 1 分数槽电机 设电机总槽数为z ,极对数为p ,相数为m ,则每极每相槽数为: q =z 2m p (1) q 为整数,则为整数槽绕组;q 为分数,则为 分数槽绕组。本文所讨论的三槽无刷直流电机中, z =3,p =1,m =3,则: q = z 2m p =32×3×1=1 2 (2) 故三槽无刷直流电机属于分数槽电机的一种。采 用分数槽的主要优点是:(1)电枢冲片的齿槽数减少,便于电枢冲片和铁心的制作;(2)每个齿上绕制一个集中线圈,从而可采用自动绕线机绕制,可以显著地提高劳动生产率,降低电动机的制造成本;(3)能显著地缩短电枢线圈的端部长度,节省铜材,并减小电枢漏抗,增加电动机的出力,提高灵敏度和效率;(4)减小齿槽效应引起的转矩脉动 [2] 。 2 三槽无刷直流电动机 211 电机本体 有的应用场合,如剃须刀、录音机、小玩具、内置式血泵等,主要从电机的的体积和电磁功率两个方面去考虑电机本体的设计。从无刷直流电机的设计角度来讲,在电磁负荷一定时,电动机的体积随电动机电磁功率的增加而增加,随电动 ? 63?微电机 2009年第42卷第3期
初中物理直流电动机实验 初中物理直流电动机实验 观察与思考 1.试总结使直流电动机转向和转速改变的因素. 2.试推想交流电动机的工作原理。 3.玩具小汽车,坦克等车辆能向前后两个方向运动,而车轮的转动由车内的电动机带动,问汽车、坦克等车辆怎样改变运动方向的? 实验结论 1.通过增大电流、增强磁场,可以使电动机的转速变快。即改变电流大小、改变磁场的强弱可以改变电动机的转动速度; 2. 只要改变电流的方向或磁场的方向中的一个,就可以改变电动机转动的方向。 实验考点 这个实验所涉及的内容,往往考查电动机的转动速度与哪些因素有关,转动的方向与哪些因素有关,以及电动机的原理,往往以探究题、填空题等形式出现。 经典考题 1. 科学家通过长期研究,发现了电和磁的联系,其中最重要的两种研究如上图所示。 (1)甲图是研究_________现象的装置,根据这一现象制了
________机。 (2)乙图是研究_____________的装置,根据这一现象制成了_________机。 3. 在安装直流电动机模型的实验中,安装完毕后闭合开关,线圈沿顺时针方向转动,要想使线圈沿逆时针方向转动,正确的做法是() A. 减少一节电池 B. 调换磁性更强的磁铁 C. 把电源正、负极和磁铁南、北极同时对调 D. 把电源正、负极对调或磁铁南、北极对调 观察与思考答案 1. 电流的方向,磁铁磁极的方向能改变电动机的转向,电流的强弱、磁场的强弱、线圈的特性能改变转速。 2. 交流电动机采用交流电源,利用电流方向的改变使线圈在磁场中受力方向改变,从而维持线圈的不断转动。 3. 当电流方向发生改变时,电动机的转向随之发生改变,进而使车轮也反向转动,达到向前后两个方向运动的目的。 经典考题答案 1.要明确电动机的原理和发电机的原理,这两个实验比较相似,是同学们容易混淆的两个知识点。发电机的原理图中没有电源而有电流表,电动机的图中有电源,没有电流表。
无刷直流永磁电动机设计实例 一. 主要技术指标 1. 额定功率:W 30P N = 2. 额定电压:V U N 48=,直流 3. 额定电流:A I N 1< 3. 额定转速:m in /10000r n N = 4. 工作状态:短期运行 5. 设计方式:按方波设计 6. 外形尺寸:m 065.0036.0?φ 二. 主要尺寸的确定 1. 预取效率63.0='η、 2. 计算功率i P ' 直流电动机 W P K P N N m i 48.4063 .030 85.0'=?= = η,按陈世坤书。 长期运行 N i P P ?'' += 'ηη321 短期运行 N i P P ?'' += 'η η431 3. 预取线负荷m A A s /11000'= 4. 预取气隙磁感应强度T B 55.0'=δ 5. 预取计算极弧系数8.0=i α 6. 预取长径比(L/D )λ′=2
7.计算电枢内径 m n B A P D N s i i i 233 11037.110000 255.0110008.048 .401.61.6-?=?????=''''='λαδ 根据计算电枢内径取电枢内径值m D i 21104.1-?= 8. 气隙长度m 3107.0-?=δ 9. 电枢外径m D 211095.2-?= 10. 极对数p=1 11. 计算电枢铁芯长 m D L i 221108.2104.12--?=??='='λ 根据计算电枢铁芯长取电枢铁芯长L= m 2108.2-? 12. 极距 m p D i 22 1 102.22 104.114.32--?=??==πτ 13. 输入永磁体轴向长m L L m 2108.2-?== 三.定子结构 1. 齿数 Z=6 2. 齿距 m z D t i 22 1 10733.06 104.114.3--?=??==π 3. 槽形选择 梯形口扇形槽,见下图。 4. 预估齿宽: m K B tB b Fe t t 2210294.096 .043.155 .010733.0--?=???==δ ,t B 可由 设计者经验得1.43T ,t b 由工艺取m 210295.0-? 5. 预估轭高: m B K B a K lB h j Fe i Fe j j 211110323.056 .196.0255 .08.02.222-?=????=≈Φ= δδτ
无刷直流电动机无传感器低成本控制方法关键词:无刷直流电动机无位置传感器控制可编程逻辑器件 1引言 无刷直流电机的无传感器控制是近年来电机驱动领域 关注的一项技术。无位置传感器控制的关键在于获得可靠 的转子位置信号,即从软、硬件两个方面间接获得可靠的 转子位置信号来代替传统的位置传感器[1~3]。采用无传感 器控制 技术的无刷电机具有结构简单、体积小、可靠性高和可维 护性强等优点,使其在多个领域内得到了充分的利用[4]。 目前对于无传感器无刷电机的控制多采用单纯依靠 DSP软件控制的方法[5],但 是由于控制算法计算量大,执行速度较慢,且DSP 成本较高,不利于以后向市场推广。同时也出现了应用于 无传感器BLDCM控制的一些专用的集成电路[6],但由于 这些芯片可扩展性和通用性较 低,而且价格昂贵,只适用于低压、小功率领域。为了扩 展无传感器BLDCM应用领域,降低其控制系统的成本, 扩充控制系统的功能,增加控制系统的灵活性,本文以 MCU+PLD方式组成控制系统的核心,利用PLD数字逻 辑功能,分担MCU 的逻辑运算压力,使MCU和PLD的 功能都得到了最大程度的发挥。对于无位置传感器 BLDCM 控制系统,本文着重分析了换相控制策略和闭环调速,最 后通过仿真和实验,验证了控制系统的合理性和可行性。 2系统的总体硬件设计 本文中所设计系统是以8位PIC单片机和 PLD构成的硬件平台,硬件结构框图如图1所示。 功率逆变电路采用三相全桥逆变结构,电机定子绕组 为Y接法,电机工作模式为三相6状态方式。在本文无传 感器控制方式中采用反电动势过零位置检测方法,位置检 测电路根据电机端电压获取3路位置信号,将信号送入 PIC单片机进 行软件移相后得到3路换相信号,由可编程逻辑 器件进行逻辑解码后输出6路驱动开关管的前极 信号,通过驱动芯片IR2233产生驱动信号以控制 各开关管的导通与关断。该系统采用速度单闭环方式,通 过改变PWM的占空比以达到调速的目的。 本文中选用Microchip 公司的单片机PIC16F874作 为控制核心,它内部有8K的FLASH 程序存储器,368字 节的数据存储器(RAM),256字节的EEPROM数据存 储器,14个中断源, 8级深度的硬件堆栈,3个定时/计数器,两个捕 捉/比较/PWM (CCP)模块,10位多通道A/D转换器 等外围电路和硬件资源⑹。这些使得运用 PIC16F874在设计硬件电路时,控制电路大大简化,可靠 性提高,调试更加方便。 PIC16F874单片机的B端口的4~7 口具有电平变 化中断的功能,利用RB5~RB7作为反电动 势的过零点检测信号的输入,如已开RB 口中断, 一旦有过零点出现(发生电平的变化)就进入RB 口中断服 务。利用CCP模块输出占空比可调的信号,可实现直流 电机调速。 3控制方法 3.1软件相移补偿 由于采用脉宽调制技术进行调速,导致无刷电 机端电压波形中存在一定的高频调制分量,因此在反电势检 测中必须采用有源低通滤波电路以滤除高频分量,避免得到 图1系统总体结构硬件框图
基于高频电压注入法的永磁同步电机转子初始位置检测 Initial Rotor Position Inspection of PMSM Based on Rotating High Frequency Voltage Signal Injection 北京航空航天大学自动化科学与电气工程学院蔡名飞周元钧 摘要:为了解决新型无位置传感器永磁同步电机的起动问题,提出了一种在电机静止状态下检测转子位置的新方法。 该方法在算法上改进了传统的旋转高频电压注入法,使得可以更为快速、准确的检测出转子初始(均扫位置。并且针对传统旋转高频电压注人法无法检测出转子永磁体极性问题,在dq旋转坐标系下,通过分析永磁同步卜匕机d轴磁链和定子电流之间的关系,利用d轴电流的泰勒级数展开,提出J’根据定子铁芯非线性磁化特性获得判另}J N/S极极性信息的新方一案。最后,建立了系统仿真模型。仿真结果验证了这种方法的有效性和可行性。此方法同样适用于永磁同步电机在中、低速时的转子位置检测。 关键词:永磁同步电机转子初始位置旋转高频注人非线性磁化特性N/S极极性 1引言 永磁同步电机高精态、高动态性能的速度、位置控制,都需要准确的转子位置信息。如果位置检测误差较大,会导致电机不能正常起动、运行。传统方法是通过机械式传感器来测量转子的速度和位置。但机械式传感器减低了系统的可靠性,增加了系统的成本;同时传感器对环境有着严格的要求,电磁干扰、温度、湿度、振动对它的测量精度都有影响。特别针对某些航空伺服电机,长期工作在恶劣、复杂的环境中,所以研究无位置传感器不仅可 以减少航空电机成本,而且可以减少不必要的引线,将大大提高整个系统的可靠性〔‘]。 最简单的无位置传感器控制方法是文献「2]提出的基于对检测到的电机反电动势进行积分,这种方法虽然简单,但是在零速或低速阶段因为反电动太小,难以检测而失败。后来人们又提出了高频注人法,其主要思想是用电机固有的空间凸极或凸极效应可以实现对转子位置的检测,这种方法与转速没有直接关系,有效克服了反电动势法的 缺陷。文献〔3]提出通过处理电流高频响应,采取求导取极值计算电机的初始位置,但这种方法存在震荡现象,高频电流也会因滤波器移相导致检测误差,并且也没有给出电 机N/S极极性检测方法。文献【4]提出在电机中注人幅值相同、方向不同的系列脉冲,检测并比较相应电流的大小来估计转子的位置。这种方法可行但是对注入脉冲的电压幅 值和时间控制要求比较高,操作复杂,检测时间过长。文献[[5][6]通过注人高频信号引起PMSM的d,q轴磁链饱和程度差异实现初始位置检测,这种方法高频电流信号提取复 杂,容易带来计算误差,难以做到转子位置的实时检测跟踪。文献〔7l所使用的电机经过特殊设计,不具普遍性,仅适用于理论研究。 为了解决以上方法的存在的问题,本文提出了一种基于旋转高频电压注人法的永磁同步电机转子初始位置检测的新方法。在电机静止状态下,通过向电机定子三相绕组中注入高频电压信号,利用电机凸极效应,通过处理高频电流响应,得出转子的位置信号。为此,本文进行了仿真研究,实现了转子d轴位置和N/S极极性的快速、准确检测。 2高频激励下的永磁同步电机的数学模型
实验八直流并励电动机 一.实验目的 1.掌握用实验方法测取直流并励电动机的工作特性和机械特性。 2.掌握直流并励电动机的调速方法。 二.实验方法 1.并励电动机的工作特性和机械特性。 表1-8 U=U N=220V I f=I fN= 80.8 mA 2.调速特性 (1)改变电枢端电压的调速 (2)改变励磁电流的调速 三.实验报告 1.由表1-8计算出P2和η,并绘出n、T2、η=f(I a)及n=f(T2)的特性曲线。
图1 n=f(I a)特性曲线图2 T2=f(I a)特性曲线 图3 η=f(I a)特性曲线图4 n=f(T2)特性曲线 2.绘出并励电动机调速特性曲线n=f(U a)和n=f(I f)。分析在恒转矩负载时两种调速的电枢电流变化规律以及两种调速方法的优缺点。 图5 特性曲线n=f(U a)图6 特性曲线n=f(I f) 在恒转矩负载时两种调速的电枢电流变化规律以及两种调速方法的优缺点: 改变电枢端电压的调速是在额定转速以下调节转速的方法,电压Ua越小,转速n越小。优点:(1)可实现平滑的无级调速;(2)相对稳定性较好;(3)调速经济性较好;(4)调速范围大。 缺点:需要专用的可调压直流电源。 改变励磁电流的调速是在额定转速以上调节转速的方法,励磁电流If减小,磁通Φ变小,转速n升高。 优点:(1)可实现无级调速;(2)稳定性好;(3)调速经济性较好;(4)控制方便,能量损耗小。 缺点:受电动机机械强度和换向火花的限制,转速不能太高,调速范围不大。
四.思考题 1.并励电动机的速率特性n=f(I a)为什么是略微下降?是否会出现上翘现象?为什么?上翘的速率特性对电动机运行有何影响? 答:根据并励电动机的速率特性公式,若忽略电枢反应,当电枢回路电流I a增加时,转速n下降;若考虑电枢反应的去磁效应,磁通Φ下降可能引起转速n的上升,即出现上翘现象。这样的变化与电枢回路电流I a增大引起的转速n降低抵消,使电动机的转速n变化很小。 2.当电动机的负载转矩和励磁电流不变时,减小电枢端压,为什么会引起电动机转速降低? 答:由直流电动机机械特性的表达式可知,转速n与电枢电压Ua成正比、与磁通量Φ成反比,所以减小电压时,转速n下降。 3.当电动机的负载转矩和电枢端电压不变时,减小励磁电流会引起转速的升高,为什么? 答:由于磁通与励磁电流在额定磁通以下时基本成正比,所以励磁电流I f减小时,主磁通也随着减小。由机械特性的表达式可知,当磁通Φ减小时,转速n升高。 4.并励电动机在负载运行中,当磁场回路断线时是否一定会出现“飞速”?为什么? 答:不一定。因为当电动机负载较轻时,电动机的转速将迅速上升直至超过允许值,造成“飞车”;但若电动机的负载为重载时,则电动机的电磁转矩将小于负载转矩,使电动机转速减小,但电枢电流将飞速增大,超过电动机允许的最大电流值,烧毁电枢绕组。
采用增量式光电编码器作为位置检测元件的PMSM伺服电机,必须要在系统刚上电时就测得电机精确的初始位置。因为在永磁伺服驱动系统中,电机转子的位置检测与初始定位是系统构成与运行的基本条件,也是矢量控制解耦的必要条件。只有永磁同步电机的转子位置能够准确知道,才可以按照矢量控制的一系列方程,将永磁同步电机等效变换成dq坐标系上的等效模型,系统才能按照类似他励直流电机的控制方法对永磁同步电机进行控制,从而可以达到他励直流电机构成的伺服传动系统的性能指标要求。使用增量式光电编码器测量电机位置的伺服系统中, 系统上电后需要先检测出电机的初始位置。电机的初始位置不仅影响伺服系统的定位精度, 而且会对电机的快速启动性能造成一定的影响。 在系统刚刚上电,电机尚未运行时,系统开始测量转子的初始位置,此过程只需要电流环工作,根据伺服系统运行要求,在寻找初始位置的过程中,只允许有很微小的抖动,并且要求很快回归原位。 假设,采用H45-8-2500-WL型光电编码器,电机转动过程中,编码器输出的信号:A(/A)、B(/B)、Z(/Z)、U(/U)、V(/V)和W(/W),如图1(b)所示。其中A(/A)、B(/B)两组信号为相差相位角的同频率信号,分辨率为2500PPR,通过判断两组脉冲的相位可以判断出电机的旋转方向,这两组信号经4倍频之后,电机空间位置的分辨率变为10000PPR。脉冲Z (/Z)是同步信号,电机每旋转一周产生一个信号,其产生的位置固定,即电机转子转到该位置时发出信号(零位信号)。 如图1所示为伺服电机混合式光电编码器的码盘结构及输出信号波形。码盘的中间码道为刻有高密度的增量式透光缝隙(2000,2500,3000PPR等),两边分布两组互成的三个缝隙,受光元件(Photo-Diode Array)接收到发光元件(LED)通过缝隙的光线而产生互差的三相信号,经过放大整形后输出矩形波信号U(/U)、V(/V)和W(/W)。利用这些信号的组合状态来分别代表磁极在空间的不同位置。U(/U)、V(/V)和W(/W)三相脉冲信号每转的脉冲个数与电机的极对数相一致。根据U(/U)、V(/V)和W (/W)三相脉冲的高低电平关系可以判断电机磁极的当前位置。其过程是:电机启动前,通过U(/U)、V(/V)和W(/W)三相脉冲的状态估算出电机磁极位置,即当前的角度,一旦电机旋转起来,光电编码器的增量式部分可以精确地检测出位置值。这里,伺服电机极对数为4对极,则每相输出信号U(/U)、V(/V)和W(/W)的周期为空间,在每个周期中可以组合成6种状态,每种状态代表空间角度范围为。
. .. 无刷直流电动机的发展现状 无刷直流电动机的发展现状:无刷电动机的诞生标志是1955年美国D.Harrison等人首次申请了用晶体管换相电路代替机械电刷的专利。而电子换相的无刷直流电动机真正进入实用阶段,是在1978年的MAC经典无刷直流电动机及其驱动器的推出。之后,国际上对无刷直流电动机进行了深入的研究,先后研制成方波无刷电机和正弦波直流无刷电机。20多年以来,随着永磁新材料、微电子技术、自动控制技术以及电力电子技术特别是大功率开关器件的发展,无刷电动机得到了长足的发展。无刷直流电动机已经不是专指具有电子换相的直流电机,而是泛指具有有刷直流电动机外部特性的电子换相电机。 直流电动机以其优良的转矩特性在运动控制领域得到了广泛的应用,但普通的直流电动机由于需要机械换相和电刷,可靠性差,需要经常维护;换相时产生电磁干扰,噪声大,影响了直流电动机在控制系统中的进一步应用。为了克服机械换相带来的缺点,以电子换相取代机械换相的无刷电机应运而生。1955年美国D.Harrison等人首次申请了用晶体管换相电路代替机械电刷的专利,标志着现代无刷电动机的诞生。而电子换相的无刷直流电动机真正进入实用阶段,是在1978年的MAC经典无刷直流电动机及其驱动器的推出。之后,国际上对无刷直流电动机进行了深入的研究,先后研制成方波无刷电机和正弦波直流无刷电机。20多年以来,随着永磁新材料、微电子技术、自动控制技术以及电力电子技术特别是大功率开关器件的发展,无刷电动机得到了长足的发展。无刷直流电动机已经不是专指具有电子换相的直流电机,而是泛指具有有刷直流电动机外部特性的电子换相电机。 无刷直流电动机不仅保持了传统直流电动机良好的动、静态调速特性,且结构简单、运行可*、易于控制。其应用从最初的军事工业,向航空航天、医疗、信息、家电以及工业自动化领域迅速发展。 在结构上,与有刷直流电动机不同,无刷直流电动机的定子绕组作为电枢,励磁绕组由永磁材料所取代。按照流入电枢绕组的电流波形的不同,直流无刷电动机可分为方波直流电动机(BLDCM)和正弦波直流电动机(PMSM),BLDCM用电子换相取代了原直流电动机的机械换相,由永磁材料做转子,省去了电刷;而PMSM则是用永磁材料取代同步电动机转子中的励磁绕组,省去了励磁绕组、滑环和电刷。在相同的条件下,驱动电路要获得方波比较容易,且控制简单,因而BLDCM的应用较PMSM要广泛的多。 无刷直流电动机一般由电子换相电路、转子位置检测电路和电动机本体三部分组成,电子换相电路一般由控制部分和驱动部分组成,而对转子位置的检测一般用位置传感器来完成。工作时,控制器根据位置传感器测得的电机转子位置有序的触发驱动电路中的各个功率管,进行有序换流,以驱动直流电动机。
第一部分电机与拖动实验的基本要求和安全操作规程电机与拖动实验课的目的在于培养学生掌握基本的实验方法与操作技能。培养学生学会根据实验目的,实验内容及实验设备拟定实验线路,选择所需仪表,确定实验步骤,测取所需数据,进行分析研究,得出必要结论,从而完成实验报告。 一、实验前的准备 实验前应复习教科书有关章节,认真研读实验指导书,了解实验目的、项目、方法与步骤,明确实验过程中应注意的问题(有些内容可到实验室对照实验预习,如熟悉组件的编号,使用及其规定值等),并按照实验项目准备记录抄表等。 实验前应写好预习报告,经指导教师检查认为确实作好了实验前的准备,方可开始作实验。 二、实验的进行 1、建立小组,合理分工 每次实验都以小组为单位进行,每组由2~3人组成,实验进行中的接线、调节负载、保持电压或电流、记录数据等工作每人应有明确的分工,以保证实验操作协调,记录数据准确可靠。 2、选择组件和仪表 实验前先熟悉该次实验所用的组件,记录电机铭牌和选择仪表量程,然后依次排列组件和仪表便于测取数据。 3、按图接线 根据实验线路图及所选组件、仪表、按图接线,线路力求简单明了,按接线原则是先接串联主回路,再接并联支路。为查找线路方便,每条支路可用相同颜色的导线或插头。 4、测取数据 预习时对电机的试验方法及所测数据作到心中有数。实验时,根据实验步骤逐次测取数据。三、实验报告 实验报告是根据实测数据和在实验中观察和发现的问题,经过分析后写出的心得体会。 实验报告要简明扼要、字迹清楚、图表整洁、结论明确。实验报告包括以下内容: 1) 实验名称、专业班级、学号、姓名、实验日期、室温℃。 2) 列出实验中所用组件的名称及编号,电机铭牌数据(P N、U N、I N、n N)等。 3) 注明实验时所用线路图中仪表量程,电阻器阻值,电源端编号等。 4) 数据的整理和计算 5) 按记录及计算的数据用坐标纸画出曲线,曲线要用曲线尺或曲线板连成光滑曲线。 6) 根据数据和曲线进行计算和分析,说明实验结果与理论是否符合,可对某些问题提出一些自己的见解并最后写出结论。实验报告应写在一定规格的报告纸上,保持整洁。