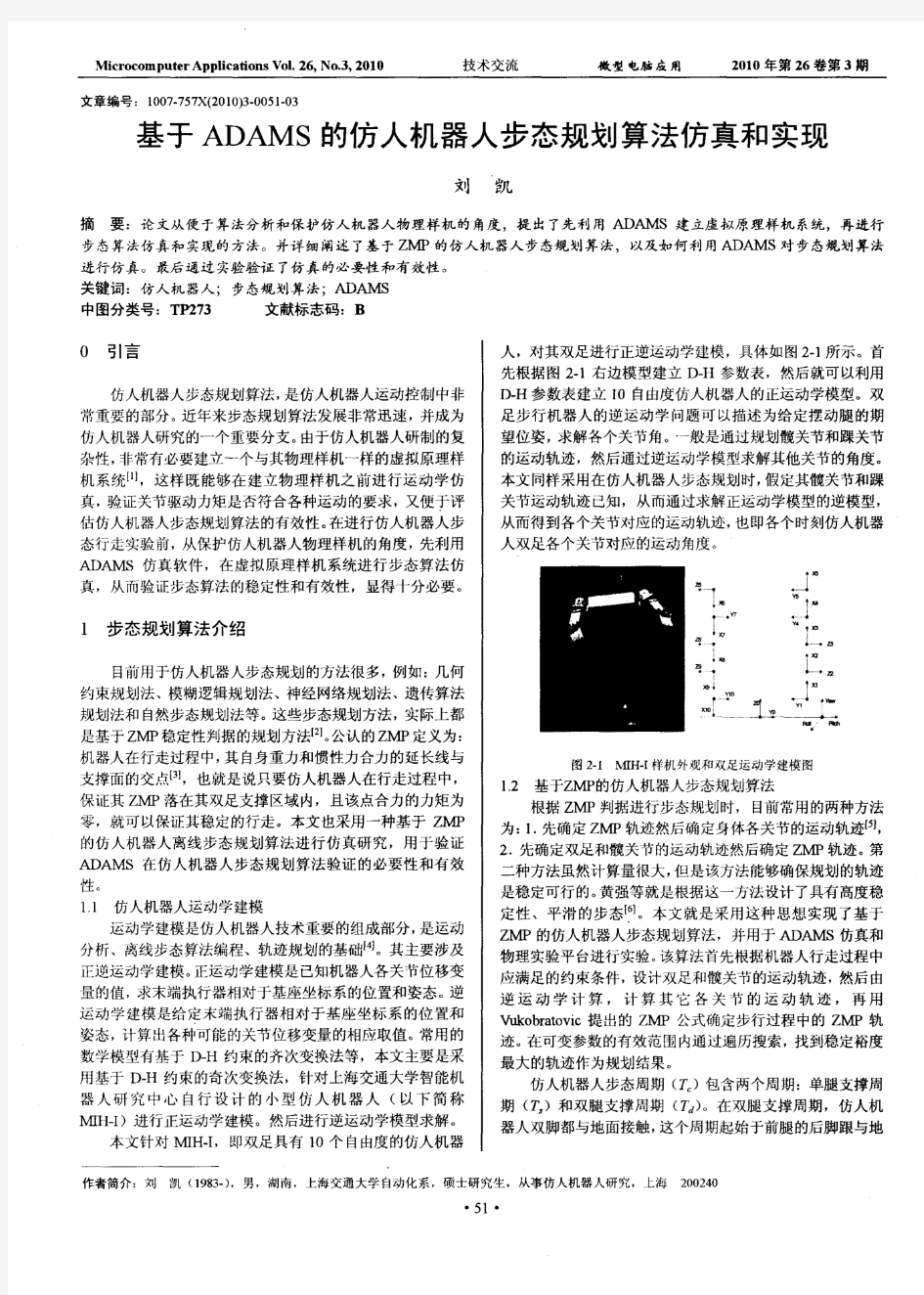
双足机器人制作及其步态运行 一、实验目的 1 . 掌握实验室设备使用方法 2 . 学会AutoCAD知识并运用以及学习arduino单片机的基本开发 3 . 了解双足机器人平衡控制方法。 二、原理说明 1.Arduino使用说明 Arduino是一款便捷灵活、方便上手的开源电子原型平台。包含硬件(各种型号的Arduino板)和软件(Arduino IDE)。它构建于开放原始 码simple I/O介面版,并且具有使用类似Java、C语言的 Processing/Wiring开发环境。主要包含两个主要的部分:硬件部分是可 以用来做电路连接的Arduino电路板;另外一个则是Arduino IDE,你的 计算机中的程序开发环境。你只要在IDE中编写双足步态程序代码,将 程序上传到Arduino电路板后,程序便会告诉Arduino电路板要做怎样 的步态运行。 2 . 双足步态算法 双足机器人平衡控制方法其中的“静态步行”(static walking),这种方法是在机器人步行的整个过程中,重心(COG,Center of Gravity)在机器人底部水平面的投影一直处在不规则的支撑区域(support region)内,这种平衡控制方法的好处是整个机器人行走的过程中,保证机器人 稳定行动,不会摔倒。但是这个平衡控制方法缺点是行动速度非常缓慢 (因为整个过程中重心的投影始终位于支撑区域)。另一种使用的平衡 控制方法是“动态步行”(dynamic walking),在这个控制方法中机器 人的步行速度得到了极大的飞跃,显而易见,在得到快速的步行速度同 时,机器人很难做到立即停止。从而使得机器人在状态转换的过程中显 现不稳定的状态,为了避免速度带来的影响。零力矩点(ZMP)被引入 到这个控制策略中,在单脚支撑相中,引入ZMP=COG。引入ZMP的好 处在于,如果ZMP严格的存在于机器人的支撑区域中,机器人绝不摔倒。
1、简介 机器人的应用越来越广泛,几乎渗透到所有领域。移动机器人是机器人学中的一个重要分支。早在60年代,就已经开始了关于移动机器人的研究。关于移动机器人的研究涉及许多方面,首先,要考虑移动方式,可以是轮式的、履带式、腿式的,对于水下机器人,则是推进器。其次,必须考虑驱动器的控制,以使机器人达到期望的行为。第三,必须考虑导航或路径规划,对于后者,有更多的方面要考虑,如传感融合,特征提取,避碰及环境映射。因此,移动机器人是一个集环境感知、动态决策与规划、行为控制与执行等多种功能于一体的综合系统。 腿式机器人的腿部具有多个自由度,使运动的灵活性大大增强.它可以通过调节腿的长度保持身体水平,也可以通过调节腿的伸展程度调整重心的位置,因此不易翻倒,稳定性更高. 腿式机器人也存在一些不足之处.比如,为使腿部协调而稳定运动,从机械结构设计到控制系统算法都比较复杂;相比自然界的节肢动物,仿生腿式机器人的机动性还有很大差距. 腿的数目影响机器人的稳定性、能量效率、冗余度、关节控制的质量以及机器人可能产生的步态种类. 2、研究方法 保持稳定是机器人完成既定任务和目标的基本要求.腿式机器人稳定性的概念: 支持多边形(supportpolygon) 支持多边形的概念由Hildebrand首先提出,用它可以方便地描述一个步态循环周期中各个步态的情况.支持多边形指连接机器人腿部触地各点所形成的多边形在水平方向的投影.如果机器人的重心落在支持多边形内部,则认为机器人稳定. 算人物脚步放置位置及达到目标位置的走法是行走技术的重要环节。 2.1 控制算法 (1)姿态控制算法 这种算法的基本思想是:已知机器人的腿对身体共同作用产生的力和力矩向量,求每条腿上的力.用数学语言表达如下(假设机器人有四条腿): 其中和z已知,要求,解出这几个力,通过控制每条腿上的力向量,就可以使机器人达到预定的姿态,实现了机器人姿态的可控性,以适应不同地形. (2)运动控制算法 这个暂时不知道 (3)步态规划算法 这种算法的基本思想是:已知机器人的腿部末端在坐标系中的位置,求腿部各个关节的关节角.当关节角确定后,就可以构造机器人的步态模式.可用算法有ZMP算法、离线规划算法。 步态规划就是基于当前系统状态设计一种算法,得到期望的控制序列。步态规划在控制
- 416 -有的效果。在急性胰腺炎的治疗中,传统的方法是绝对禁食并给与全肠外营养使胰腺得到“休息”,这样既可以较容易控制营养供应又能避免麻痹性肠梗阻及胰腺刺激。然而除了增加费用及导管相关性败血症风险以外,全肠外营养还可能使炎症过程恶化,导致新陈代谢及水电解质紊乱,增加肠粘膜渗透率,破坏肠粘膜屏障,进而引起脓毒症及多器官功能衰竭。Ionnn idis O等研究表明,肠内营养能维持肠道机械、生物、免疫屏障功能,降低内毒素血症,减少肠源性感染,并可以防止多器官功能衰竭。[25]C.S. Mansfield等通过对狗的动物实验研究表明,针对急性胰腺炎早期肠内营养较之肠外营养有更好的耐受性及更低的并发症发生率。[26]国内吴兴茂等也分析研究后得出以下结论,在阻止胰腺坏死感染方面肠内营养明显优于肠外营养[27] 。 综上所述,肠内营养在显著改善肝胆胰疾病患者的营养状态,延缓疾病发展进程,减少其并发症发生率及延长其生存率等方面显著优于肠外营养,目前已在临床治疗中广泛应用,其临床应用价值仍有待进一步研究与开发。 参 考 文 献 [1]Vieira JP,Araujo GF,et al.Parenteral nutrition versus enteral nutrition in severe acute pancreatitis [J].Acta Cir Bras. 2010,25(5):449-454. [2]Petrov MS,Whelan https://www.doczj.com/doc/ce11272859.html,parison of complications attributable to enteral and parenteral nutrition in predicted severe acute pancreatitis: a systematic review and meta-analysis [J]. Br J Nutr. 2010 ,103(9):1287-1295. [3] Vieira JP,Araujo GF,et al. Parenteral nutrition versus enteral nutrition in severe acute pancreatitis [J].Acta Cir Bras. 2010,25(5):449-454. [4]Petrov MS,Whelan K. Comparison of complications attributable to enteral and parenteral nutrition in predicted severe acute pancreatitis: a systematic review and meta-analysis [J]. Br J Nutr. 2010 ,103(9):1287-1295. [5] Quan H,Wang X,Guo C. A meta-analysis of enteral nutrition and total parenteral nutrition in patients with acute pancreatitis [J]. Gastroenterol Res Pract. 2011;2011:698248. [6] Wu X M,Ji K Q,Wang H Y,et al. Total enteral nutrition in prevention of pancreatic necrotic infection in severe acute pancreatitis[J]. Pancreas. 2010 39(2):248-251. [7]Plauth M,Cabré E,Riggio O.ESPEN Guidelines on Enteral Nutrition:liver disease[J].Clinical Nutrition. 2006(25),285啰294. [8]Ronis MJ,Hennings L,Stewart B,et al.Effects of long-term ethanol administration in a rat total enteral nutrition model of alcoholic liver disease[J].Am J Physiol Gastrointest Liver Physiol.2011 Jan;300(1):G109-19. [9]C h r i s t o p h e M o r e n o1,P h i l i p p e L a n g l e t,Axel Hittelet,et al.Enteral nutrition with or without N-acetylcysteine in the treatment of severe acute alcoholic hepatitis:A randomized multicenter controlled trial[J].Journal of Hepatology .2010 53(8),1117啰1122. [10]M e n g Q H,Y u H W,L i J,e t a l. I n a d e q u a t e nutritional intake and protein energy malnutrition involved in acute and chronic viral hepatitis Chinese patients especially in cirrhosis patients[J].Hepatogastroenterology,2010,57( 101) : 845-851. [11]Kachaamy T,Bajaj JS. Diet and cognition in chronic liver disease[J].Curr Opin Gastroenterol,2011,27( 2) : 174-179. [12]Zhao VM,Ziegler TR. Nutrition support in end stage liver disease[J].Crit Care Nurs Clin North Am ,2010,22 ( 3 ) : 369-380. [13] Moreno Villares JM. Parenteral nutrition-associated liverdisease[J] . Nutr Hosp,2008,23( 2) : 25-33. [14]周召海,彭永鹏,张建立. 部分肠内营养支持对肝硬化病人的治疗效果[J]. 青岛大学医学院学报,2009,45( 6) : 544-546. [15] Rayes N,Seehofer D,Theruvath T,et al. Effect of enteral nutrition and synbiotics on bacterial infection rates after pylorus-preserving pancreatoduodenectomy. Ann Surg. 2007,246(1):36-41. [16] Plauth M,Riggio O,Assis-Camilo M,et al. ESPEN Guidelines on Enteral Nutrition: Liver disease. Clin Nutr. 2006,25(2):285-294. [17]罗文峰,时军,周凯等. 肝移植后早期营养支持的评估[J]. 中国组织工程研究与临床康复,2011,15(5):800-805. [18] Marik PE,Zaloga GP. Immunonutrition in high-risk surgical patients: a systematic review and analysis of the literature[J]. Parenter Enteral Nutr. 2010,34(4):378-386. [19] Schreiter D,Rabald S,Bercker S,et al.The s i g n i f i c a n c e o f p e r i o p e r a t i v e i m m u n o n u t r i t i o n[J]. Laryngorhinootologie. 2010,89(2):103-113. [20]Z h a o D F,Z h a n g K,L a n g R,e t a l.C l i n i c a l observation of enteral immunonutrition in patients undergoing liver transplantation[J].Zhongguo Zuzhi Gongcheng Yanjiu yu Linchuang Kangfu.2011;15(31):5873-5878. [21]O'Brien A,Williams R.Nutrition in end-stage liver disease:principles and practice[J].Gaatrcemerology.2008,134(6):1729-1740. [22] Wiles A,Woodward J M.Recent advances in the management of intestinal failure-associated liver disease[J].Curr Opin Clin Nutr Metab Care.2009,12(3):265-272. [23]保红平,杨浩雷,高瑞岗等.早期肠内营养在胆道外科患者术后的临床应用[J].肝胆胰外科杂志,2007,19(5):55-56. [24]陈强谱.肠内营养的技术与应用[J].世界华人消化杂志,2000,8(12):1389. [25]Ionnnidis O,Lavrentieva A,Botaioe D. Nutrition support in acute pancreatitis [J].JOP.2008,9( 4) :375-390. [26]Mansfield CS,James FE,Steiner JM,et al. A pilot study to assess tolerability of early enteral nutrition via esophagostomy tube feeding in dogs with severe acute pancreatitis[J].Vet Intern Med.2011;25(3):419-425. [27]Wu,Xing-Mao MD,Ji,Kai-Qiang MD,Wang,Hai-Yuan MD,et al.Total Enteral Nutrition in Prevention of Pancreatic Necrotic Infection in Severe Acute Pancreatitis[J].Pancreas.2010,39(2):248-251. 【摘要】目前国内机构少有涉足于康复机器人的研究,而国外的辅助康复治疗机器人设备已有很多,所运用到的机器人检测技术和控制技术也各有不同。本文主要介绍无锡市康复医院Lokehelp康复机器人的原理、国内外的研究进展及展望。 【关键词】Lokehelp康复机器人 原理 进展 展望 下肢步态康复机器人的研究综述 王小勇 过克方 黄建(无锡市康复医院康复科 江苏无锡 214000) 【中图分类号】R496【文献标识码】A【文章编号】1672-5085(2012)28-0416-03 无锡市康复医院Lokehelp康复机器人是第一台拥有专利技术的跑台设计的步态训练器,并且完成了W O O D W A Y跑台系统, 万方数据
第41卷 第10期2014年10月计算机科学 Comp uter ScienceVol.41No.10 Oct 2014到稿日期:2013-07-01 返修日期:2013-09-06 本文受国家自然科学基金项目:基于云模型的音乐情感表示与识别算法研究(61303137),基于基因表达式编程的动漫情感化配乐技术研究(61070075),基于嵌套随机集的产品意象认知模型研究(61003147),生物启发设计中产品创意造型生成机制及其演化模型研究(51305077),广东省产学研项目基于人体行为模型的智能助行机器人研究与开发(00411420124671038)资助。高增桂(1986-),男,博士生,主要研究方向为人机接口、应用人机工程;孙守迁(1963-),男,博士,教授,主要研究方向为计算机辅助设计、人机共生装备;张克俊(1978-),男,博士,助理研究员,主要研究方向为进化计算、机器学习,E-mail:channy@zju.edu.cn(通信作者);佘铎淳(1987-),男,硕士,主要研究方向为人机交互;杨钟亮(19 82-),男,博士,讲师,主要研究方向为体感交互、生物启发设计等。面向外骨骼机器人人机交互的步态数据 获取系统及识别模型 高增桂1 孙守迁1 张克俊1 佘铎淳1 杨钟亮2 (浙江大学计算机科学与技术学院 杭州310027)1 ( 东华大学机械工程学院 上海201620)2 摘 要 外骨骼机器人人机交互是当前的研究热点,通常需要获取人体相关运动信息作为控制信号源。为了采集人体步态数据,研究了生理信号与关节运动之间的关联机制,设计了一种步态数据获取系统,其利用鞋内薄膜压力传感器和关节角度传感器组成测试设备,成功采集了15组健康男子在3km/h、4km/h和5km/h 3种速率下自然行走的步态数据。提出采用基因表达式编程建立膝关节运动识别模型, 并使用所采集的步态数据进行训练和验证。结果显示,利用此模型可有效进行关节运动的识别和预测,验证了本系统作为外骨骼人机接口的可行性。关键词 人机交互,人机接口,步态分析,基因表达式编程,外骨骼 中图法分类号 TP23 文献标识码 A DOI 10.11896/j.issn.1002-137X.2014.10.009 Gait Data System and Joint Movement Recog nition Model for Human-exoskeleton InteractionGAO Zeng-gui 1 SUN Shou-qian1 ZHANG Ke-jun1 SHE Duo-chun1 YANG Zhong-liang 2 (School of Computer Science and Technology,Zhejiang University,Hangzhou 310027,China)1(College of Mechanical Engineering,Donghua University,Shang hai 201620,China)2 Abstract Human-machine interaction plays a great role in control of exoskeletons,and usually it is required to obtainthe relevant information about body motion as control signal sources.In order to collect human gait data and find the as-sociation between the physiological signals and the joint movement mechanism,we designed a Gait Data Acq uisitionSystem(GDS)which consists of eight thin-film pressure sensors and a joint angle sensor.After gait experiments,we ob-tained 15groups of gait data of health male objects with natural walking under three rates in 3km/h,4km/h and 5km/h.We also proposed establishment of recognition model of the knee joint motion using GEP.The gait data was used totrain and validate the recognition model.The result shows that the model can effectively identify and predict knee jointmotion and the GDS is feasible as a human-machine interface in exoskeletons.Keywords Human-computer interaction,Human-machine interface,Gait analysis,GEP,Exoskeleton 1 引言 外骨骼机器人是一种以人为主、 机械为辅的穿戴式人机一体化[1] 装备,它巧妙地结合人的智能和机器的力量来完成 仅靠人体自身无法单独完成的任务,不仅扩展了人体感官,也增强了人体机能。由于外骨骼机器人与人体运动相平行,因此其控制要点是与使用者之间的运动适配性。为了获得和谐自然的人机交互,通常将使用者置于控制环路以形成闭环的 反馈控制回路[ 2] 。人机接口是实现人与外骨骼通信的方式,它通过采集人体生理信息,获得人体运动意图,帮助外骨骼制 定有效的控制策略[ 3] 。对下肢外骨骼而言,人机接口的功能是分析和预测人体步态数据。步态是人类步行的综合特征,包括中枢命令、身体 平衡和协调控制,涉及肢体肌肉和关节的协同运动。其中,骨骼是运动的杠杆,关节用于运动的联系,神经系统用于控制, 肌肉收缩作为动力,从而实现下肢的行走运动[ 4] 。典型步态是连续的周期运动,包含许多复杂的生理信息,步态分析旨在检测和分析这一过程中的运动轨迹、接触力信息、肌电信号等 生理参数变化规律并应用于医学、生物工程等领域[ 5] 。随着计算机科学的发展,步态分析和识别研究取得了长足进步,常用的方法是基于视觉的步态分析及利用生理信号测量的分析等。基于视觉的步态分析主要用于临床诊断以及身份识别,而对外骨骼机器人的控制通常采用生理信号测量方法。脑机接口(Brain-M achine Interface,BMI)是当前智能控制领域的研究热点[6] ,其局限在于难以反映人的无意识行 为。利用表面肌电信号(sEMG) 分析技术提取反映运动意愿· 24·
中国矿业大学徐海学院 双足竞步机器人设计与制作技术报告 队名:擎天柱班级:电气13-5班_________________________ 成员:郭满意游世豪侯敏锐唐丽丽 侯伟俊王胜刘利强杨光 题目双足竞步机器人__________________________________________ 任课教师:李富强_________________________________________ 2015年12月 双足竞步机器人设计与制作任务书
任务下达日期:2015年10月16日 设计日期:2015年11月1 日至2014年12月31日 设计题目:双足竞步(窄足)机器人的设计与制作 设计主要内容和完成功能: 1、双足竞步机器人机械图设计; 2、双足竞步机器人结构件加工; 3、双足竞步机器人组装; 4、双足竞步机器人电气图设计; 5、双足竞步机器人控制板安装; 6、整机调试 7、完成6米的马拉松比赛。 教师签字: 双足机器人的机构是所有部件的载体,也是设计双足机器人最基本的和首要的工作本文根据项目规划和控制任务要求,按照从总体到部分、由主到次的原则,设计了一种适 合仿人双足机器人控制的机构。文章首先从机器人整体系统出发,制定了总体设计方案,再根 据总体方案进行了关键器件的选型,最后完成了各部分机构的详细设计工作。经过硬件设计、
包括机械结构设计、电路设计与制作,机器人步态规划算法研究,利用Atmega8芯片实现了对六个舵机的分时控制,编写VC上位机软件,通过串口通信对双足 竞步机器人进行调试,通过人体仿生学调试出机器人的步态规划。实现了双足竞步机器人稳定向前行走、立正。 关键词:双足机器人、机械结构 目录 1系统概述 (1) 2硬件设计 (2) 2.1机械结构 (2) 2.2电路设计 (2) 3软件设计 (4) 3.1 AVR 单片机程序设计 (4) 3.2 PC上位机调试软件设计 (4) 4系统调试 (5)
刚柔混联步态康复机器人机构学分析 王克义1,2,张立勋1,孟浩 2 (1.哈尔滨工程大学机电工程学院,黑龙江哈尔滨 150001; 2. 哈尔滨工程大学自动化学院,黑龙江哈尔滨 150001) 摘要:针对下肢步态康复训练需要,对一种刚柔混合并联康复机器人进行机构学研究.在满足工作空间需要的条件下,提出一种刚柔混合并联机器人,利用D-H法和影响系数法建立了系统的运动学模型,并通过牛顿欧拉法和联立约束法对力学平衡方程进行了分析,得出系统动力学具有非线性和耦合性.根据正常人步态规律,利用MATLAB和ADAMS软件进行了协作仿真,证明了所建运动学模型正确性,同时得出了关节运动与绳索运动之间对应关系.研究结果证明了刚柔混合并联康复机器人实现下肢步态康复训练的可行性,为该机器人的动力学分析和伺服控制策略研究做准备. 关键词:刚柔混合;步态;康复机器人;运动规划 中图分类号:TH113.2文献标识码: A 文章编号: Abstract:. Key words: 随着物质生活水平的提高、机器人技术的发展以及人体运动参数化描述的进步,出现了一种新型机器人——康复训练机器人。如今理论和实践已经证明,对具有肢体运动功能障碍(的)患者,借助该类机器人通过模拟正常人运动规律进行反复训练,能够防止肌肉“废用性”萎缩和关节僵硬,从而达到实现恢复肢体功能目的。在下肢步态康复训练方面,目前主要存在两类机器人:一类是通过控制脚部的运动规律(单点控制),实现带动下肢髋膝关节的运动;另一类是附着在下肢肢体上,通过控制每一个关节处的铰链旋转,实现带动关节的运动(穿戴控制)。前者传动机构容易实现,但对于具有冗余性的下肢[1]而言无法保证关节的运动精度,影响康复效果;后者能够保证关节运动精度,但传动机构和驱动装置不容易实现。德国自由大学研制了一种下肢康复机器人MGT,其步态机构采用双曲柄摇杆机构[2],仅有1个自由度,功能单一,无法实现复杂运动规律;美国加利福尼亚大学研制了一种两自由度下肢康复机器人,通过V型机构实现对与受训练者相连的端点进行控制,该机器人具有可逆性[3];瑞士苏黎世联邦工业大学研制了新型Lokomat下肢康复机器人,具有4个回转自由度的穿戴装置带动受训练者腿部实现步态运动,但整体机构复杂,价格昂贵[4].中国在该方面的研究也取得一定进展,哈尔滨工程大学研制出一种采用并联机构控制脚踏板实现跨步[5],可以满足下肢各种不同运动规律的需要,但机构比较庞大;上海大学、浙江大学等单位研制了一种下肢外骨骼装置,通过电动缸直线驱动实现 收稿日期:2010-6-10 基金项目:国家863资助项目(2008AA040203);黑龙江省自然科学基金资助项目(F200904);中央高校基本科研业务费专项资金 (HEUCF100707). 装置的回转运动[6-7],用以控制各个下肢关节的运动.绳索牵引并联机构具有运动速度快、惯性小、柔顺性好、结构简单等优点,现如今对其研究主要集中在工作空间、运动学、拉力优化、动力学和控制策略等内容.总结上述研究特征,该文提出一种刚柔混合并联下肢康复机器人,克服单点控制和穿戴控制的弊端,并对其进行了运动学、力学分析,通过联合仿真对机器人的步态期望运动进行了运动规划研究.为进一步研究系统的动力学和伺服控制策略提供了条件. 1 刚柔混合机器人 刚柔混合并联机器人由刚性二连杆机构和绳索牵引并联机构组成.机器人的二连杆机构通过连接装置分别附着在大、小腿上,用于带动髋关节和膝关节的转动;而绳索牵引并联机构用于控制二连杆上的牵引点在矢状面内运行,由于绳索牵引属于冗余驱动系统,为减少驱动元件,设计成完全约束定位机构[8].该刚柔混合机器人呈左右对称,考虑步态时下肢的运动空间[9],将其中一侧的机构形式设计成如图1所示. 该机器人的刚性二连杆机构属于外骨骼装置,能够保证关节运动控制精度,改善了单点控制精度差的问题;绳索牵引不仅克服了穿戴控制中驱动装置不易布置问题,而且减小了系统惯性,能够提高系统的动态控制性能,同时柔性绳索在力闭环控制下能够降低对训练者主动性的强迫限制,提高训练安全性。