
第一章固体表面
概述
因为摩擦和磨损都发生在表面上,表面的状态影响着摩擦的大小、磨损的类型以及润滑剂的选择。因此,表面是摩擦学研究的重要对象。在讨论摩擦磨损之前,首先需要对表面进行了解,正确判断表面对摩擦磨损的影响。
表面的定义:在物理学中,把两种物质的界面称为表面(在弹性力学中,表面应该满足以下边界条件:其上各点的法向应力ζn和切向应力ηn均为零)。
本文讨论的对象:几个到几十个原子(或分子)的表面膜或几个晶粒的表面层,以及几个mm的表层。
通常,这个表面层的状态是复杂的。宏观上具有一定的几何形状,微观上存在各种晶格缺陷,在一定的环境下还存在各种吸附膜、反应膜和污染膜。
人们将不存在其它任何物质(包括自然污染膜)的表面称作纯净表面。自然污染膜是指物体表面不是由于人为的原因,而是自然形成的表面覆盖膜,如水汽吸附膜、氧化膜或其它异物。这种表面可以在固体发生显著的塑性变形时,或表面污染膜被破坏时可能出现,也可以在真空条件下获得。
裸露的纯净表面性能十分活泼,极易吸附其它物质的分子,或与其起化学作用。纯净表面摩擦时摩擦系数一般很高,同时会发生粘着(有时被称作冷焊)。
1.1固体表面的几何性质
1.1.1表面粗糙度
表面的凹凸不平程度与表面积之比称为表面粗糙度,是表面的亚微观状况。它直接影响摩擦系数和磨损。
对于一个工程表面,不论其加工得怎样精细,从微观角度看,总是存在着某种程度的高低起伏。即工程表面都是粗糙的,不是理想光滑的表面。描述表面粗糙程度的参数称为表面粗糙度(过去也称表面光洁度)。
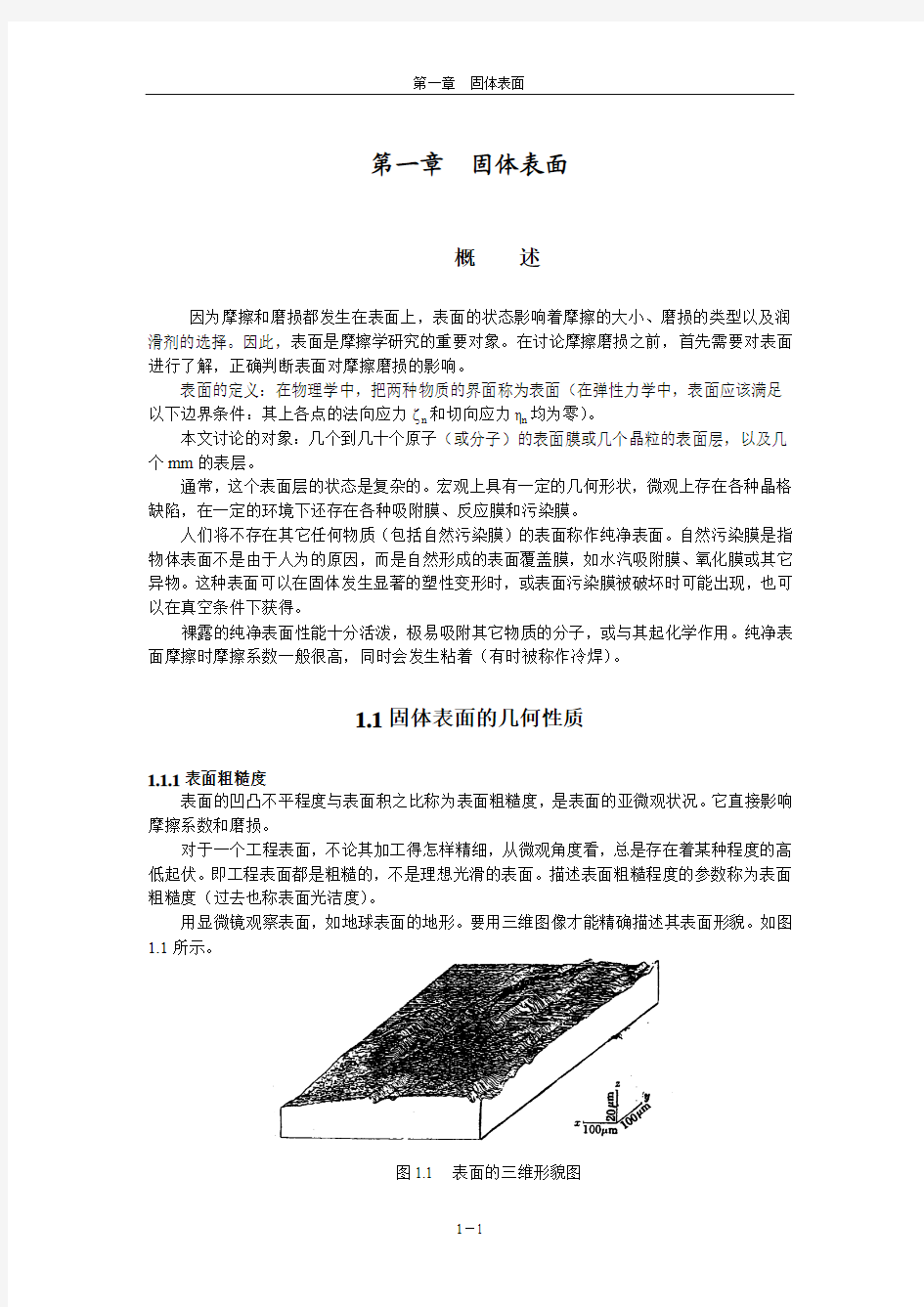
用显微镜观察表面,如地球表面的地形。要用三维图像才能精确描述其表面形貌。如图1.1所示。
图1.1 表面的三维形貌图
||1||110∑
?
===n
i i L i Z n dx Z L CLA 2
11
2
2102]1[]1[∑
?
===n
i i L i Z n dx Z L
RMS 图1.4 具有相同CLA
值的不同形貌 如果表面加工方法有一定规律(如车、铣、刨),人们通常用二维图形来表示。(如图1.2所示)。由于加工方法造成的宏观粗糙度呈一定方向和波长的波形(称波度)。微观粗糙度的波长很短,且具有不同的幅度和间距。表面上的微小凸起部分称微凸体。如经过抛光研磨等加工,这种波度明显消失,粗糙度显示出各向同性。
描述表面粗糙度,不是用其最大的波峰波谷之差。国标(GB1031-83)规定了两种表面粗糙度的表示方法:中线平均值(CLA )和平均平方根值(均方根)(RMS )。
图1.3为粗糙表面轮廓的二维示意图。 先取一中线(x 轴),把二维轮廓分成上下两半,并满足:中线上方的轮廓与中线所围的面积等于中线下方轮廓的面积。令从中线到轮廓的高度为Z i 。
①中线平均值(CLA )
表示表面轮廓上各点相对于中线的算术平均偏差。
②平均平方根值(均方根)(RMS )
表示表面轮廓上各点相对于中线的偏差值之平方的平均值的开方。 通常使用RMS 比较好,因为,同样的CLA 值其表面形貌是可以很不相同的,对摩擦磨损的影响也是不同的。如图1.4。而用RMS,图中各不相同的形貌具有不同的表面粗糙度。
1.1.2表面微凸体
用触针式表面轮廓仪可直接测得表面的起伏不平。不过因其高度方向的放大比例远大于平面方向的。故所得图形并不能反映峰谷起伏的实际形状。而用电子显微镜观测到的表面,因其各向放大比例相等而比较真实。
由电子显微镜观测到的图形可以看到,表面上的峰与谷实际上是比较平缓的,因此人们通常取微凸体为近似的半球状、锥状或柱状来进行几
何因素的分析。
表面微凸体的高度各点不同,如用统计学的微凸体
微观粗糙度
宏观粗糙度
图1.2 粗糙表面的二维图
图1.3 粗糙表面示意图
正态分布曲线 高度Z i
图1.5 微凸体的高度分布曲线
方法进行研究,可以画出表面轮廓上各点的高度(Z i )是个随机的变量,将其不同高度出现的频率(概率)记录下来画成光滑的曲线(图1.5),称为高度分布曲线。
凡经过一般机械加工的表面,其微凸体高度的分布通常接近于正态分布(高斯分布)。 正态分布曲线理论上应延伸到处。
而实际上在的范围内已包括了99.5%的高度(σ为分布的标准差)。
1.2固体表面的原子排列和结构缺陷
经过不同加工过程形成的表面,因机械作用,往往导致材料的晶格扭歪、晶界开裂;由于温升导致金属发生相变而再结晶,使晶粒长大;或因为表层材料变形导致表层密度和体积发生变化,从而在表层的塑性变形层中产生残余应力,甚至产生微裂纹。金属表层内种种微观性状的改变,均对其摩擦磨损有密切的关系。因此需对其进行仔细的观察。 金属表面的原子排列具有一定的形状,对于没有缺陷的纯单晶体,表面上的原子排列应是整体材料内部原子排列的延伸。
不同的金属具有不同的晶体结构。图1.6所示为金属的几种典型结构。
在各种晶体结构中,不同晶面上的原子密度不等。当承受载荷发生滑动时,原子密度高(原子数多)表面能低的面上,容易发生滑移。图1.7为立方晶系中几个可能滑移的晶面:(100)面、(110)面和(111)面。面心立方的(111)面和体心立方的(110)面,以及密排六方的(001)面都是原子密度高的晶面,沿这类晶面滑移的阻力最小。 但是表面的原子排列,往往不是整体材料内部原子排列的延伸,原子排列得不像理想的
那样整齐。如多晶体表面有镶嵌块结构;多晶体的晶界交错,原子排列常没有规律,而且还有缺陷。如多晶体表面有镶嵌块结构。单晶体的表层也会出现各种结构缺陷(如图1.8所示)。如刀刃位错,形成通向内部的线缺陷;螺型位错,表示该处形成断层,由表面伸向内部,于是在表面上产生台阶;解理断裂形成了曲折和台阶;表面上的原子可能逸出而出现晶格空位,外来的原子可能形成填隙原子;如外来原子局域表面可形成“增附原子”;加上外部的杂质原子,使大多数金属晶体出现很多位错。这些位错在滑移时会形成台∞±σ3±图1.6 几种典型的晶体结构 面心立方 体心立方
密排六方
图1.7 立方晶系中几个可能滑移的晶面
图1.8 表面结构缺陷模型
阶。见图1.5。
晶体材料接触滑动而引起变形的过程中会产生位错台阶(称为表面滑移带或滑移线),滑移带的移动可能与杂质相交,生成更多的位错。位错堆积的地方会形成早期的微观裂纹。在有结构缺陷(位错、台阶或空位)的地方会发生晶粒长大、溶解、吸附或化学反应(如腐蚀)等现象。这些对摩擦磨损都有一定的影响。
这类结构缺陷不仅金属会有,一些非金属晶体(如层状晶体、金刚石、氯化钠和有机润滑剂等)也存在这类结构上的缺陷。
这些缺陷都比较小,需依靠现代的仪器设备才能看到。如场离子显微镜(FIM ),低能电子衍射(LEED ),场发射显微镜(FEM )等。
1.3表面张力和表面能
液体受到拉向内部力的作用,使其表面肌收缩和凝聚,这种力叫表面张力。表面能是
指将液体内部分子拉到表面上所需作的功。 当液滴落在固体表面上时(见图1.9),由于液体具有各自的表面张力,它同时受到固体与空气的界面张力(γs )、液体与空气的界面张力(γl )和液体与固体的界面张力(γsl )的作用。当 时,液滴在表面上达到平衡,且具有一固定的形态。
不同的液体在同种固体表面上,得到不同的接触角。接触角小的液体表面张力小。接触角的大小衡量着固体表面与液体之间的润湿性。图1.9(a )中的接触角小,表示固液间的润湿性好。而图1.9(b )中的接触角大,表示固液间的润湿性差。
固体也有表面能和表面张力。固体的表面能是指将固体拉开而形成新表面时需作的功。如果固体表面十分洁净(未被污染,也无吸附膜等),则表面处于高能状态。如其它固体表面与这种表面接触,将显示出高的粘着能力,摩擦明显增大。表面能高的固体与液体接触时,具有较小的接触角,能很好地与液体润湿,使液体润滑剂能很好地与之亲和,得到低摩擦。 同种液体在不同的固体表面上,也得到不同的接触角。接触角小的表示固体的表面能高。是亲水性表面。接触角大的,说明固体的表面能低,是疏水性表面。不易与液体亲和也不易与其它固体表面粘着。 对于结晶固体来说,表面能是沿晶面解理而形成新表面所需的解理能。由于晶体各面的原子数不同,原子数高的表面易于解理,即这些表面的表面能低,易于发生滑移。
sl l s γθγγ+=cos
1.4表面膜
在一般条件下,固体表面总是被周围介质所包围。而这些介质(包括气态或液态介质)常常与固体表面发生物理与化学作用,使固体表面的结构变得更复杂。通常摩擦副由金属制成,金属表面在大气环境中总有一层薄薄的氧化膜覆盖着,氧化膜的外层还有污染膜和吸附膜等,构成了复杂的表面层。
1.4.1吸附膜
表面的洁净程度较高时,极易将周围介质的分子吸附到表面上形成吸附膜。如果是靠范德华力键合在表面上的称物理吸附膜。
吸附的量是吸附物的分压(当吸附分子为气体时)或吸附物浓度(当吸附物为液体)和绝对温度的函数。
n s=f(p,T)
n s=f(c,T)
式中:n s为吸附量;p为吸附气体分压;c为吸附液体浓度;T为绝对温度。
吸附膜的牢固程度(吸附力的大小),可以用吸附热来衡量。吸附热是变量。开始吸附时的吸附热高,当固体表面布满吸附分子后开始第二层吸附时,固体表面与吸附分子的作用随层数增多而减弱,吸附热就逐渐降低。直到吸附热降低到没有能力再吸附时,吸附达到饱和。要除去这种吸附膜,除了机械作用外,用加热可使其脱附。故物理吸附膜是可逆的吸附膜。
吸附分子与固体表面发生电子交换时(即改变了吸附层分子的电子分布),吸附分子与固体表面的作用是化学键结合,称化学吸附膜。其作用力比物理吸附膜强。化学吸附的吸附热值比较高,所以脱附时需要比脱附物理吸附膜更高的温度(更高的能量)。化学吸附常常是单分子层。而物理吸附则可能是多分子层。
化学吸附需要一定的活化能,且与吸附剂的表面有关。所以化学吸附有一定的选择性。而物理吸附可以在任何表面上发生。
在固体表面上吸附的还有污染膜。
润滑剂分子可在固体表面上形成吸附膜(单分子层或多分子层)。例如,脂肪酸类的润滑剂,具有很长的分子链,这种细长的分子链被密集地吸附在固体表面上,形成具有一定刚性的边界膜,把承受载荷的接触面分开。同时,细长的分子有一定的柔性,当承载表面相对运动时,其剪切阻力很低,有明显的减摩效果。
润滑剂分子中如果电子分布不均匀(不对称),则分子链的形状不对称。缺少(或多余)电荷的分子称偶极子,其一端带正电荷,另一端带负电荷,故也称为极性分子。极性分子与固体表面的亲和力很强,能牢固地附着在表面上。常用润滑剂都是长链的碳氢化合物,一端带有氨基(-NH2)、氰基(-CN)、羟基(-OH)、羧基(-COOH)等极性基。这类极性分子的吸附效果很好。如果使用的润滑剂无极性分子,可以加入少量具有极性的分子(称为油性剂),使吸附速度加快。但如果第一层已吸附饱和,则再加入极性分子已不发挥作用,有时反而有副作用。
摩擦面上吸附膜的存在是一种动态过程。在摩擦过程中,可能因为微凸体使吸附膜受到机械损伤,也可能因为局部摩擦热而被解吸。同时,吸附又会在新生的表面上再次发生,所以是个动态过程。如摩擦条件更有利于解吸,则此类吸附膜的减摩作用也将大大降低。
1.4.2表面氧化膜和反应膜
固体表面材料与周围介质起反应,形成的表面覆盖膜称为反应膜。化学反应总是在物质的相与相的界面上发生。化学反应必须有原子交换,即需提供一定能量,以得到反应物。如反应所需的热量越高,表示起反应的温度也越高。摩擦表面的温升如不能及时散逸,则会加快反应膜的生成速度。反应速度除与温度有关外,还与压力、浓度和是否使用催化剂有关。 金属表面的氧化膜是典型的反应膜。金属固体表面在有氧环境中很容易氧化生成氧化物。氧化物多数以分层形式出现。如铁的氧化首先是氧在铁表面上的化学吸附,然后氧化层增厚。增厚过程中,往往出现孔隙和裂纹,有助于氧分子与新鲜表面的金属元素相接触而生成新的氧化物。由于氧的浓度和反应温度的不确定,故而出现不同化学成分的氧化膜。图1.10为570℃以上的氧化铁层。 润滑剂吸附膜的极性端与活性的金属表面分子及其氧化物反应生成金属皂膜。这种皂膜的结构类似于晶态固体,其解吸温度比化学吸附膜还高。
在润滑剂中加入极压添加剂(EP 剂),可促使其与金属形
成反应膜。常用的添加剂为含硫、磷、氯等的极性有机化合物。当这些化合物在高温下与金属表面起化学反应,在金属表面上形成一层抗剪强度低的硫化物、磷化物或氯化物这类无机覆盖物。这类膜可将摩擦表面隔开,而且承载能力比吸附膜高。在
摩擦过程中如因机械作用被破坏,还能再生。但是对金属磨损作用,却有复杂的效果。因为硫、磷、氯等成分对金属有腐蚀作用。
为了防止这类腐蚀作用,可以采用复合添加剂,如加入含锌、铅、钡、釹等元素的有机盐,而生成另一类反应膜,以改善其热稳定性和化学安定性。 以上所述的表面膜(吸附膜和反应膜)通常都覆盖在表面上,使摩擦的固体表面被隔开,有效地防止了固体与固体间的直接接触。这些表面膜具有一定的承载能力,而其机械强度一般都低于固体自身的整体强度,这种表面膜都对摩擦磨损有明显的影响。
1.5固体表面的接触
1.5.1分子(或原子)间的接触
分子(或原子)间存在着吸力和斥力,当吸力和斥力相平衡时,分子(或原子)间有一个正常的距离d 。当施加外力使分子(或原子)间的距离大于d 时,其间存在着吸力;反之,如使其间距离小于d 时,则存在着斥力。当施加的拉力较大,使分子(或原子)间的距离拉开到一定程度时就会发生材料分子的断裂。 原子沿解理面滑移比较容易,晶体往往沿解理面开裂。要拉开晶格中相互键联的原子(或分子)就必须作功。要拉开非解理面的原子需要的能量就比沿解理面移动原子的能量大。在洁净的表面(或由于开裂而形成的初生面)上与介质分子间键联的力通常为范德华力。而晶格中有的原子间的键力比范德华力高,就难以将这些原子分开。
单晶体不同方位解理而裂开时所需的功是不一样的,所以是各向异性的。而金属(多晶体)因晶体排列错乱,故为各向同性。 对于金属晶体来说,施加外力可使晶格变形。当外力卸除后能恢复到原有形状的称为弹性变形;如外力卸除后不能(或不能完全)恢复到原有形状时,残留下来的永久变形称塑性变形。外力产生弹性变形作的功是可逆的,而产生塑性变形作的功是不可逆的。
图1.10 铁的氧化膜
∑
==n
1
i ri
r A A 1.5.2两表面间的接触 ①接触面积
固体表面不论如何精加工都是凹凸不平的。当在法向力N 的作用下,使两固体表面相互压紧时,通常只在很小的面积上发生接触。
接触表面的面积可分为:
a.名义接触面积:即表面宏观面积——A n
b.真实接触面积:在表观接触面积中,实际传递力的微小面积的总和称真实接触面积A r 。如图1.11所示。
一般材料在塑性变形范围内的真实接触面积与载荷成正比,与表面的大小和形状无关。假设接触材料的压
缩屈服极限(塑性流动极限)为ζb ,在
法向载荷N 作用下相互压紧时,真实接触面积可表示为: A r =N/ζb
②赫兹(Hertz )接触
经过精细加工的表面,常假定其微凸体为半球状、柱状、锥状等。对于工程上单个微凸
体而言,也并非几何学中的球、柱、锥形。
赫兹接触是在弹性接触范围内分析理想光滑的球(柱、锥)在无润滑条件下的接触。而实际上也并非全是弹性变形,在接触点处有塑
性变形。从图1.12所示的“光滑”半球体赫兹
接触下真实情况的照片,证实了赫兹压力中心处的接触斑点比较密集,而在赫兹压力边远处接触分布比较稀疏。说明固体表面接触只在传力的微凸体顶端发生塑性变形,离开这小小的塑性变形区变形在弹性范围中。
因此,可以根据弹性理论来
计算微凸体(球、柱或锥)接触时的压力分布。
a.椭球与椭
球接触:在法向压力N 的作用下相互压紧(见图1.13),在接触部分产生弹性变形。形成的接触面积,假定为以a 和b 为半径的椭圆形。
N 塑性流动压力分布 赫兹分布
图1.12 赫兹接触和实际接触 ζ0 N
N
(a) (b )
图1.13 椭球与椭球接触时的接触面积(a)和压力分布(b )
椭园形表面上赫兹压力的分布曲线为: 式中:ζ为坐标在x ,y 处的压力
ζ0为最大赫兹压力,在x=y=0处; a 为接触区面积的x 方向半径,
b 为接触区面积的y 方向半径
在应力椭圆上积分,求σ的总和得接触面上的正压力为:
由正压力N 可求得:
b.球与球接触:
则接触面积呈圆形,即a =b 。其压力分布曲线为:
同样经积分可求得最大压力: 平均压力:
即 接触区的半径:
式中:R 为接触两球的综合曲率半径,与两接触球半径的关系如下:
2
11
11R R R +
= E 为两球的综合弹性模量,与两接触材料性能的关系如下:2
2
2
12
1111E E E νν-+-=
式中:R 1,R 2分别为两接触球的半径;E 1和E 2以及ν1,和ν2分别为两球材料的弹性模量和
泊松比。
则最大赫兹压力ζH (x=y=0处):
c.球与平面的接触:可对两球接触的公式中取: R 2=∝ R 1=R,
则
d.圆柱与圆柱的接触:接触面积为矩形。长度为L ,宽度为b 。则
总压力为
最大压力 2
1222201???? ??--=b y a x σσm ax 023σπσ==
ab
N
3
2
σπab N =2
122
2201???
?
??--
=a y a x σσ2023a N
πσ=2a N m πσ=
m
σσ5.10=3
143?
?? ???=E R N a m ax
3
1
22058.0σσσ=???
???==R NE H 3
1212058.0???
? ??=R NE σ2
12
2
01???
? ?
?
-
=b y
σσ02
σπbL
N =bL
N
πσ20=
3
143??? ???=E R N a
接触半宽
经代入简化,得
式中:R 综合曲率半径; E 综合弹性模量。
e.圆柱对平面的接触:将R 2=∞,R 1=R 代入圆柱对圆柱接触公式
则
f.赫兹接触的变形和接触面积
赫兹压力分布曲线表明,最大压应力在接触区的中心。最大剪切应力在距压力中心处深度约0.5a 的表层下,ηmax ≈0.3ζ0。最大拉应力作用在接触面边界处,ζ≈0.133ζ0。
接触承载时,表层下的某一深度处(0.5a )剪应力最大,材料在该处首先屈服。但此屈服区很小,而且处于三个方向受压的状态。而这小范围的塑变区,被四周弹性状态的材料包围着(见图1.14)。
通常材料在接触承载时,表面的最大压力: ζ0=3.1ηs (ηs 为材料的剪切屈服极限)时,表层下剪应力的最大值ηmax 达到ηs ,就开始屈服。但图中
的塑性区很小,且处于三向受压状态。所以当ζ0=3.1ηs 时,表面材料仍未屈服。直到表面平均压力ζm ≈6ηs 时,塑性区才扩展到表面,材料才开始屈服,表面上才留下压痕。这时的平均压应力ζm ≈6ηs ≈ζb (ζb 相当于压痕硬度H )。
剪切屈服极限与抗拉屈服极限的关系为:ηs ≈0.5ζs (ζs 材料拉伸时的屈服极限)。即在接触承载时,材料发生塑性变形时的压应力相当于3倍的拉伸屈服极限。 对于大多数金属而言,都有以下关系: H≈6ηs ≈3ζs
因此材料发生塑性变形时的真实接
触面积:
此值大约只有表观接触面积的1/1000。由此可见,真实接触面积的大小只取决于载荷和材料的流动压力,而与表面粗糙度的关系不大,与宏观表面积也无关。
③赫兹接触的法向接近
2
1
13.1?
?? ??=LE
NR b 2
1
0564.0?
?? ??=LR NE σ2
110564.0????
??=LR NE σN 图1.14 表面下的变形区 H
N N A b r ==
σ图1.15 球和平面的弹性接触
N
当一个球与平面在法向载荷N 的作用下弹性接触时,球将发生变形,使球的中心下移,此下移量称为法向接近量δ。如图1.15所示。
如只在球上发生弹性变形(图中a),根据几何图形可知R 2=(R-z)2-r 2,即 因为z<<2R ,所以
式中 r=a (接触面积的半径)
如球与平面都发生弹性变形,
将球对平面的赫兹接触中的 代入上式
则得或
式中:E 为综合弹性模量;R 球的半径;δ 法向接近量。 变形后的接触面积A=πα2 式中α 为接触面积的半径。 α2=Rδ
即在弹性范围内,变形后的接触区面积 A=πα2=πRδ。
1.5.3理想的粗糙表面接触
假设微凸体都是理想光滑的半球,而且具有等高度、等半径的。当一个理想光滑的刚性平面在法向力N 的作用下与之接触时的情况如图1.16所示。 当处于弹性变形范围内,每个微凸 体承受的法向载荷 为:
式中:ρ 为微凸体的顶端半径;
δ 为法向接近(图1.16中δ=Z -d ); N=n·N i
每个微凸体的接触面积A i =πρδ 经代入前面导出的公式,并简化后得到接触总面积: 式中:
这说明,弹性变形范围内,具有等高度、等半径的微凸体表面,在承载时,其接触面积A r 与载荷N 成指数关系,为与N 的2/3次幂成正比。
如法向载荷N 增大,使微凸体顶端压力达到流动极限H 时,微凸体发生塑性变形。此
23213
4δER N =23
2134δρE N i
=3
21
1N
K
A A n
i r ==∑
2
12
3
1
34n E
K -
=
ρπN A r =
图1.16 理想的粗糙表面接触
z
R r Z -=
22
322
3169RE N ∝δR
a R a z w z 2
2222=
=≈+=δ3143??? ???=E R N a
时的接触面积为与法向载荷N 呈线性关系。
1.5.4实际粗糙表面的接触
实际工程表面微凸体的高度为正态分布。假设与理想平面接触,法相接近量为δ=Z -d 。那么只有高度Z>d 的微凸体才能与之接触(见1.17)。 根据赫兹接触公式及假设微凸体高度为指数分布,并设h=d/ε。可
推导出:
比较上面两式,可见 式中:N 为法向载荷;A 为总支承面积;c 为常数项;ε=d/h 表面粗糙度RMS ; h 微凸体高度指数分布的指数。 这说明,高度为指数分布的微凸体发生弹性变形时,实际接触面积与法向载荷之间为简单的线性关系。
当微凸体顶端为塑性变形时: A=N/H 。这一结果与高度分布无关。
实际上工程表面上微凸体的高度是按正态分布的。由于高斯曲线顶端一段(约占25%的一部分),与指数函数十分接近,所以可以把它看作指数分布。由此得到的结论是:两个实际工程表面接触时,不论微凸体的顶端在弹性变形范围,还是在塑性变形范围,变形后所形成的真实接触面积A 都与法向载荷N 之间呈简单的线性关系。
1.5.5接触变形性质的判据
在实际工程表面间的接触,往往是高的微凸体可能产生塑性变形,低的则为弹性变形。说明实际情况是弹、塑性混有的状态。载荷越大,法向接近越大,塑性接触点越多。所以法向接近量δ的大小,在N 确定的情况下,反映了表面微凸体接触后发生塑性变形的程度。
当微凸体处于弹性接触时,平均压力ζm <3ζs 。将和A=πRδ=πρδ
代入,得和
而当最大压应力ζ0=3.1ηs 或ζm ≈ζs =1/3H 时(H=3ζs ),开始转变为塑性变形。此时
当ζm ≈6ηs =3ζs =H 时为完全塑性变形,进一步扩大到
式中:ζm 平均压应力;ζs 拉伸屈服极限;ηs 剪切屈服极限;δ 法向接近量;
ρ 微凸体顶端半径;H 硬度(压缩屈服极限);E 综合弹性模量。
图1.17 实际粗糙表面的接触
()
πρεh ne A -=232121)(ερπE ne N h
-=?
???
? ??=E H
21214ρπδ2
1
δE H
2
12
1ρδ≈
2
1
2
134πρδσE A N m ==E m
432121σπρδ=cN
A =2
3213
4δER N =111
在的等式前后除以 得
将定义为塑性指数(ε为表面粗糙度RMS )。用ψ来表示,则:
认为:ψ>1为塑性接触; ψ<0.6为弹性接触。
这里可见,接触变形的性质不完全取决于载荷,而是与材料性质、表面粗糙度ε、微凸体顶端的平均曲率半径ρ有关。ψ反映了接触表面的某些物理与几何性质的影响。如一些零件经过磨合,由于表面粗糙度在磨合前后发生明显变化,而使ψ迅速降低。
1.5.6表面间有表面膜存在时的接触(见图1.18)
表面膜的存在,对于真实接触面积的计算没有什么影响。因为表面的粗糙不平为10~100nm ,远大于表面污染膜的厚度几nm ,表面氧化膜的10~30nm ,两表面接触时只有少数高点接触,大部分面积上的表面膜与对摩面上的表面膜相隔甚远,所以多数原子(或分子)间并不发生作用。而且接触部分的面积比膜厚大得多,只要表面膜不破裂,微凸体的变形情况和表面上实际承载面积的大小,仍然取决于表层材料的物理性能和表面的几何性质。因此,膜的存在对计算真实接触面积的影响不大。 但是,表面膜的存在对于表面的粘着是很有影响的。洁净表面的真实接触面积上金属分子的相互作用很强,很容易粘着。而接触面间有表面膜存在时对摩擦磨损的影响都是很明显的。
1.6摩擦状态下的表面
前面讨论的都是静态下表面的特征和表面接触状态。摩擦一开始表面就是动态状况了。一旦开始运动,由于载荷下接触时表面会发生变形,有弹性变形,也有塑性变形。使表面与未接触时的原始状态发生了明显的变化。
在摩擦过程中,由于摩擦功变成热能使表面温度升高,引起表面的物理化学性能发生某些变化,从而又影响其接触状态。摩擦过程中的发热效应,还会使表面发生晶体结构或机械性能的变化。直接影响以后的摩擦情况。
摩擦过程中,由于接触而发生材料间的粘着。对于不同的摩擦对偶表面和不同的摩擦条件下,粘着发生的部位及损伤程度各有不同。这样,使摩擦表面在摩擦过程中不断被损伤或磨损,也即不断地发生着变化。
摩擦过程中润滑剂也将引入摩擦面。不同的润滑剂将以不同形式和方法导入,不同成分
2
1
??? ??δε2
1
???? ??=ρεψH E 图1.18 有表面膜存在时的表面接触状况 2
1ε
的润滑剂会与表面产生不同的效果或发生不同的反应,又会改变表面的状况。
因此,摩擦状态下的表面以及摩擦的整个过程,是一个非常复杂的系统。
参考资料
1.陈耕、汪一麟,《摩擦与磨损》,同济大学出版社,1989,上海
2.郑林庆,《摩擦学原理》,高等教育出版社,1994,北京
3.《机械工程手册》第22篇,摩擦磨损与润滑,机械工业出版社,1978,北京
第三章固体材料中的扩散 Chapter3 The Diffusion in Solid Materials 作业1:原版教材第143页第22题 22. Which type of diffusion do you think will be easier (have a lower activation energy)? a. C in HCP Ti b. N in BCC Ti c. Ti in BCC Ti Explain your choice. Solution: A and b interstitial solid solutions, but c is a substitutional solid solution. So the mechanism of diffusion of a and b is interstitial diffusion, and the mechanism of diffusion of c is the vacancy exchange. We have known that the activation energy for vacancy-assisted diffusion Q v are higher than those for interstitional diffusion Q i. So c is the most difficult one comparing a and b, HCP Ti is a close-packed structure, much closer than BCC, so b is the answer. The diffusion of N in BCC Ti will be easier (have a lower activation energy).
第一章、晶体的结构 习题 1.以刚性原子球堆积模型,计算以下各结构的致密度分别为: (1)简立方, 6 π ; (2)体心立方, ; 8 3 π (3)面心立方,; 6 2 π(4)六角密积,; 6 2 π (5)金刚石结构,; 16 3 π [解答] 设想晶体是由刚性原子球堆积而成,一个晶胞中刚性原子球占据的体积与晶胞体积的比值称为结构的致密度, 设n为一个晶胞中的刚性原子球数,r表示刚性原子球半径,V表示晶胞体 积,则致密度ρ= V r n3 3 4 π (1)对简立方晶体,任一个原子有6个最近邻,若原子以刚性球堆积,如图1.2所示,中心在1,2,3,4处的原子球将依次相切,因为 , , 4 33a V r a= = 面1.2 简立方晶胞 晶胞内包含1个原子,所以 ρ= 6 ) ( 3 3 2 3 4π π = a a (2)对体心立方晶体,任一个原子有8个最近邻,若原子刚性球堆积,如图1.3所示,体心位置O的原子8个角顶位置的原子球相切,因为晶胞空间对角线的长度为, , 4 33a V r a= =晶胞内包含2个原子,所以 ρ=π π 8 3 ) ( * 2 3 3 4 3 3 4 = a a
图1.3 体心立方晶胞 (3)对面心立方晶体,任一个原子有12个最近邻,若原子以刚性球堆积,如图 1.4所示,中心位于角顶的原子与相邻的3个面心原子球相切,因为3,42a V r a ==,1个晶胞内包含4个原子,所以 ρ=6 2)( *4334234 ππ=a a . 图1.4面心立方晶胞 (4)对六角密积结构,任一个原子有12个最近邻,若原子以刚性球堆积,如图1。5所示,中心在1的原子与中心在2,3,4的原子相切,中心在5的原子与中心在6,7,8的原子相切, 图 1.5 六角晶胞 图 1.6 正四面体 晶胞内的原子O 与中心在1,3,4,5,7,8处的原子相切,即O 点与中心在5,7,8处的原子分布在正四面体的四个顶上,因为四面体的高 h =2 23232c r a == 晶胞体积 V = 222 360sin ca ca =ο, 一个晶胞内包含两个原子,所以 ρ=ππ62) (*2223 3234 =ca a .
第一章晶体的结构 一、填空体(每空1分) 1. 晶体具有的共同性质为长程有序、自限性、各向异性。 2. 对于简立方晶体,如果晶格常数为a,它的最近邻原子间距为 a ,次近邻原子间 ,原胞与晶胞的体积比1:1 ,配位数为 6 。 3. 对于体心立方晶体,如果晶格常数为a a2/,次近邻原子间距为 a ,原胞与晶胞的体积比1:2 ,配位数为8 。 4. 对于面心立方晶体,如果晶格常数为a 邻原子间距为 a ,原胞与晶胞的体积比1:4 ,配位数为12 。 5. 面指数(h1h2h3)所标志的晶面把原胞基矢a1,a2,a3分割,其中最靠近原点的平面在a1,a2,a3上的截距分别为__1/h1_,_1/h2__,__1/h3_。 6. 根据组成粒子在空间排列的有序度和对称性,固体可分为晶体、准晶体和非晶体。 7. 根据晶体内晶粒排列的特点,晶体可分为单晶和多晶。 8. 常见的晶体堆积结构有简立方(结构)、体心立方(结构)、面心立方(结构)和六角密排(结构)等,例如金属钠(Na)是体心立方(结构),铜(Cu)晶体属于面心立方结构,镁(Mg)晶体属于六角密排结构。 9. 对点阵而言,考虑其宏观对称性,他们可以分为7个晶系,如果还考虑其平移对称性,则共有14种布喇菲格子。 10.晶体结构的宏观对称只可能有下列10种元素:1 ,2 ,3 ,4 ,6 ,i ,m ,3,4,6,其中3和6不是独立对称素,由这10种对称素对应的对称操作只能组成32 个点群。 11. 晶体按照其基元中原子数的多少可分为复式晶格和简单晶格,其中简单晶格基元中有 1 个原子。 12. 晶体原胞中含有 1 个格点。 13. 魏格纳-塞茨原胞中含有 1 个格点。 二、基本概念 1. 原胞 原胞:晶格最小的周期性单元。 2. 晶胞 结晶学中把晶格中能反映晶体对称特征的周期性单元成为晶胞。 3. 散射因子 原子内所有电子在某一方向上引起的散射波的振幅的几何和,与某一电子在该方向上引起的散射波的振幅之比。 4. 几何结构因子 原胞内所有原子在某一方向上引起的散射波的总振幅与某一电子在该方向上所引起的散射
第一章、 晶体的结构 1. 以刚性原子球堆积模型,计算以下各结构的致密度分别为: (1)简立方, 6π; (2)体心立方, ;8 3π (3)面心立方, ;62π (4)六角密积,;62 π (5)金刚石结构, ;16 3 π [解答] 设想晶体是由刚性原子球堆积而成,一个晶胞中刚性原子球占据的体积与晶胞体积的比值称为结构的致密度, 设 n 为一个晶胞中的刚性原子球数,r 表示刚性原子球半径,V 表示晶胞体 积,则致密度ρ=V r n 3 34π (1) 对简立方晶体,任一个原子有6个最近邻,若原子以刚性球堆积, 如图1.2所示,中心在1,2,3,4 处的原子球将依次相切,因为 ,,433a V r a == 面1.2 简立方晶胞 晶胞内包含1个原子,所以 ρ= 6 ) (3 3 23 4π π= a a (2)对体心立方晶体,任一个原子有8个最近邻,若原子刚性球堆积,如 图1.3所示,体心位置O 的原子8个角顶位置的原子球相切,因为晶胞空间对角线的长度为,,433a V r a ==晶胞内包含2个原子,所以 ρ= ππ8 3) ( *23 3 4 334= a a
图1.3 体心立方晶胞 (3)对面心立方晶体,任一个原子有12个最近邻,若原子以刚性球堆积,如图 1.4所示,中心位于角顶的原子与相邻的3个面心原子球相切,因为 3,42a V r a ==,1个晶胞内包含4个原子,所以 ρ= 6 2) ( *43 3 4 234ππ= a a . 图1.4面心立方晶胞 (4)对六角密积结构,任一个原子有12个最近邻,若原子以刚性球堆积,如图1。5所示,中心在1的原子与中心在2,3,4的原子相切,中心在5的原子与中心在6,7,8的原子相切, 图 1.5 六角晶胞 图 1.6 正四面体 晶胞内的原子O 与中心在1,3,4,5,7,8处的原子相切,即O 点与中心在5,7,8处的原子分布在正四面体的四个顶上,因为四面体的高 h =2 23 2 32c r a == 晶胞体积 V = 2 22 360sin ca ca = , 一个晶胞内包含两个原子,所以 ρ= ππ6 2)(*22 2 3 3 234= ca a .
第三章 晶格振动与晶体热学性质习题课 1. 引入玻恩卡门条件的理由是什么? [解答] (1) 方便于求解原子运动方程. 由本教科书的(3.4)式可知, 除了原子链两端的两个原子外, 其它任一个原子的运动都与相邻的两个原子的运动相关. 即除了原子链两端的两个原子外, 其它原子的运动方程构成了个联立方程组. 但原子链两端的两个原子只有一个相邻原子, 其运动方程仅与一个相邻原子的运动相关, 运动方程与其它原子的运动方程迥然不同. 与其它原子的运动方程不同的这两个方程, 给整个联立方程组的求解带来了很大的困难. (2) 与实验结果吻合得较好. 对于原子的自由运动, 边界上的原子与其它原子一样, 无时无刻不在运动. 对于有N 个原子构成的的原子链, 硬性假定0 ,01==N u u 的边界条件是不符合事实的. 其实不论什么边界条件都与事实不符. 但为了求解近似解, 必须选取一个边界条件. 晶格振动谱的实验测定是对晶格振动理论的最有力验证(参见本教科书§3.2与§3.4). 玻恩卡门条件是晶格振动理论的前提条件. 实验测得的振动谱与理论相符的事实说明, 玻恩卡门周期性边界条件是目前较好的一个边界条件. 2. 什么叫简正振动模式?简正振动数目、格波数目或格波振动模式数目是否是一回事? [解答] 为了使问题既简化又能抓住主要矛盾,在分析讨论晶格振动时,将原子间互作用力的泰勒级数中的非线形项忽略掉的近似称为简谐近似. 在简谐近似下, 由N 个原子构成的晶体的晶格振动, 可等效成3N 个独立的谐振子的振动. 每个谐振子的振动模式称为简正振动模式, 它对应着所有的原子都以该模式的频率做振动, 它是晶格振动模式中最简单最基本的振动方式. 原子的振动, 或者说格波振动通常是这3N 个简正振动模式的线形迭加. 简正振动数目、格波数目或格波振动模式数目是一回事, 这个数目等于晶体中所有原子的自由度数之和, 即等于3N . 3. 长光学支格波与长声学支格波本质上有何差别? [解答] 长光学支格波的特征是每个原胞内的不同原子做相对振动, 振动频率较高, 它包含了晶格振动频率最高的振动模式. 长声学支格波的特征是原胞内的不同原子没有相对位移, 原胞做整体运动, 振动频率较低, 它包含了晶格振动频率最低的振动模式, 波速是一常数. 任何晶体都存在声学支格波, 但简单晶格(非复式格子)晶体不存在光学支格波. 4. 讨论晶体中声子数目与温度的关系 [解答] 频率为i ω的格波的(平均) 声子数为 11 )(/-= T k i B i e n ωω , 即每一个格波的声子数都与温度有关, 因此, 晶体中声子数目不守恒, 它是温度的变量. 按照德拜模型, 晶体中的声子数目N’为 ωνπωωωωωωωd 2311d )()('0 3 22 /0 ? ????? ????? ??-==D B i D p c T k V e D n N . 作变量代换 T k x B ω = ,
第三章习题参考解答
3.1已知一维单原子链,其中第j 个格波,在第n 个格点引 起的位移μnj 为: δj 为任意位相因子。并已知在较高温度下每个格波的平均能量为kT ,具体计算每个原子的平方平均位移。 ) sin(j j j j nj naq t δωαμ++=2 1 )(sin 1 2 = ++? dt q n t T j j j T δαω根据 =2nj μ 2 2 22 1)(sin j j j j j q n t αδαωα=++解:其中T =2π/ωj 为振动周期,所以:
格波的平均动能: ∑?=n nj m E 2 2 1 μN m j j 224 1ωα=一维单原子链可以认为是经典的简谐运动,因此有: )(cos 212 22j j j j n j q n t m δαωωα++=∑平均动能=平均势能= 格波平均能量=kT 2 1 21其中:M =ρL
其中振幅 2 22j j Nm kT ωα=得: kT N m E j j 2 14122= =ωα所以有:2 2221j j nj Nm kT ωαμ ==所以,每个原子的平方平均位移: ∑∑∑===2 22 1 21j j nj n Nm kT ωαμμ其中:M =ρL
3.2 讨论N个原胞的一维双原子链(相邻原子间距为a),其2N个格波解,当M=m时与一维单原子链结果一一对应。 解:质量为M的原子位于2n-1,2n+1,2n+3……。 质量为m的原子位于2n,2n+2,2n+4 ……。
牛顿运动方程 体系有N个原胞,有2N个独立的方程方程的解: A,B有 非零解
3.1 已知一维单原子链,其中第j 个格波,在第n 个格点引起的位 移 nj μ为: s i n (n j j j j a t n a q μωδ =++ j δ为任意相位因子。并已知在较高温度下每个格波的平均能量为B k T 。 具体计算每个原子的平方平均位移。 解:(1)根据2011 sin ()2 T j j j t naq dt T ωδ?++= 其中2j T π ω= 为振动周期, 所以222 21 sin ()2 nj j j j j j a t naq a μωδ=++= (2) 第j 个格波的平均动能 (3) 经典的简谐运动有: 每个格波的平均动能=平均势能=1 2格波平均能量=12 B k T 振幅222B j j k T a Nm ω=, 所以 2 22 12B nj j j k T a Nm μω==。 而 每 个原子 的平方平均位移为: 222221()2 B n nj nj j j j j j j k T a Nm μμμω====∑∑∑∑ 。 3.2讨论N 个原胞的一维双原子链(相邻原子间距为a ),其2N 个格波的解。当m M =时与一维单原子链一一对应。 解:(1)一维双原子链: 22q a a π π - ≤< 声学波:1 222 2 411sin ()m M mM aq mM m M ωβ-????+??=--????+???? ?? 当m M =时,有 2 224(1cos )sin 2 aq aq m m ββω-= -= 。
光学波:1 222 2 411sin ()m M mM aq mM m M ωβ+?? ??+??=+-????+???? ?? 当m M =时,有 2 2 24(1cos )cos 2 aq aq m m ββω+= += 。 (2)一维双原子链在m M =时的解 22224sin 2422cos 2aq m q aq a a m βωπ π βω-+?=??- ≤< ? ?=?? 与一维单原子链的解 224sin 2 aq q m a a βπ π ω=- ≤< 是一一对应的。 3.5已知NaCl 晶体平均每对离子的相互作用能为: 其中马德隆常数 1.75,9a n ==,平衡离子间距0 2.82r =?。 (1) 试求离子在平衡位置附近的振动频率。 (2) 计算与该频率相当的电磁波的波长,并与NaCl 红外吸收频 率的测量只值61μ进行比较。 解:(1)处理小振动问题,一般可采用简谐近似,在平衡位置附近,可将互作用能展开至偏差0r r δ=-的二次方项。 22400002 00 ()() 1()()()2U r U r U r U r O δδδδδδδδδδ==?+?++=+?+?+?? (1) 其中 00 () 0U r δδδ=?+=? 为平衡条件。 由0r 已知可确定β: 2 1 0n q r n αβ-= 。 (2) 根据(1)式,离子偏离平衡位置δ所受的恢复力为:
班级 成绩 学号 Chapter 3 晶格振动与晶体的热学性质 姓名 (lattice vibration and its heat characteristics) 一、简要回答下列问题(answer the following questions): 1、在晶格常数为a 的一维单原子晶格中,波长λ=8a 和波长λ=8a/5的格波所对应的原子 振动状态有无不同? 试画图加以说明。 [答]对于一维单原子链,由q=2π/λ知,λ=8a 时,q =π/4a ,λ=8a /5时,q =5π /4a ,二者的aq 相差π,不是2π的整数倍,因此,两个格波所对应的原子振动状态不同。 如上图,当两个格波的位相差为2π的整数倍时,则它们所对应的原子的振动状态相同。 2、什么叫简正振动模式?简正振动数目、格波数目或格波振动模式数目是否是一回事? [答]在简谐振动下,由N 个原子构成的晶体的晶格振动,可等效成3N 个独立的谐振子的 振动,每一个谐振子的振动模式称为简正振动模式。格波振动通常是这3N 个简正振动模式的线性叠加。 简正振动数目、格波数目或格波振动模式数目是是一回事,其数目等于晶体中所有原子的自由度之和,即等于3N 。 3、晶体中声子数目是否守恒?在极低温下,晶体中的声子数与温度T 之间有什么样的关 系? [答]频率为ωi 的格波的平均声子数为 : 1 1)(/-= T k i B e n ωω 即每一个格波的声子数都与温度有关,因此晶体中的声子数目不守恒,它随温度的改变而改变。 以德拜模型为例。晶体中的声子数目为
ωωωωd g n N D )()('0 ? = 其中 令 T k x B ω = 则 123'2/0 3 3233 -= ? x T B e dx x C T k V N D θπ 在极低温度下,θD /T →∞,于是 3 3 133233 20 3 3233 )2(23123'T n C T Vk e dx x C T k V N n B x B ∑ ? ∞=∞ =-= ππ 即在温度极低时,晶体中的声子数目与T 3 成正比。 4、爱因斯坦模型在低温下与实验存在偏差的根源是什么?而在极低温度下,德拜模型为 什么与实验相符? [答]爱因斯坦模型的格波的频率大约为1013 Hz ,属于光学支频率。而光学格波在低温时对 热容的贡献非常小,低温下对热容贡献大的主要是长声学波。所以爱因斯坦模型在低温下与实验存在偏差的根源是没有考虑声学波对热容的贡献。 在极低温度下,不仅光学波得不到激发,而且声子能量较大的短声学格波因为未能被激发,得到的激发只是声子能量较小的长声学格波。长声学格波即弹性波。德拜模型只考虑弹性波对热容的贡献。因此,温度越低,德拜模型与实验结果符合得越好。 5、格波与弹性波有何不同? [答]格波与弹性波相比都具有波的形式,但两者又有不同之处: (1) 对于一维单原子链格波解为: ) (naq t i n Ae u -=ω 弹性波的解为: ) (qx t i n Ae u -=ω 在弹性波的解中, x 表示空间任意一点,而在格波解中只能取na 格点的位置. (2) 弹性波的色散关系是线性的,ω=cq, c 是弹性波的波速; 而格波的色散关系:|2 1 sin |2 aq m β ω= 所表示的是周期函数:)()2(q a q ωπ ω=+ , 且ω 有极大值m m βω2= 。 但当q 很小时,一维单原子链的色散关系与连续弹性介质波的色散关系趋于一致: cq q m a =≈β ω 而且c 就是把原子链看成弹性链时,弹性波的波速. ωωπωωd C V d g 2 3 223 )(=
1 3 . 1已知一维单原子链,其中第j 个格波,在第n 个格点引起的位移nj 为: nj a j sin( j t naq j j ) (2)第j 个格波的平均动能 (3) 经典的简谐运动有: 1 -格波平均能量= 2 4ma2 2N 3.2讨论N 个原胞的一维双原子链(相邻原子间距为 时与一维单原子链 --- 对应。^m a 2 j 2cos 2 ( j t 2 n j naq j j ) lma 2 2N 4 振幅a 2 吧,所以 Nm j 2 nj 1 2aj k B T_ 2。 j Nm 而每个原子的平方平均位移为: (nj )2 j 2 nj 1 2 2aj j Nm j j 为任意相位因子。 并已知在较高温度下每个格波的平均能量为 k p T 。具体计算每个原子 的平方平均位移。 1 根据丄 T 解:(1) T ? 2 / . o sin ( j t naq j j )dt 其中T —为振动周期, j 所以2j a^sin 2( j t naq j 每个格波的平均动能=平均势能= a ),其2 N 个格波的解。当m M 解:(1) 一维双原子链: 2a q 2a 声学波: 2 m M mM 4mM .2 2sin aq (m M)2 当m M 时, 2 j m cosaq) m Jin 2 凹。 2 光学波: 2 7 1 mM 4mM (m M)2 2 sin aq
「0 3. 5已知NaCI 晶体平均每对离子的相互作用能为: u(r) 其中马德隆常数 a 1.75,n 9 ,平衡离子间距r 0 2.82?。 (1) 试求离子在平衡位置附近的振动频率。 (2) 计算与该频率相当的电磁波的波长,并与 比较。 解:(1)处理小振动问题,一般可采用简谐近似,在平衡位置附近,可将互作用能展开至偏 r r °的二次方项。 U(r 。 )U(r 。) U(r 。 1 2U(r 。 2 2 2 0( 4) 其中 U(r 。 2 q n r 。 n 根据 0为平衡条件。 由r 0已知可确定 (1)式,离子偏离平衡位置 所受的恢复力为: U(r 。 2U(r o 2 故恢复力常数为 2 U(r) 2 r n 3 r ° (1) (2) (3) ⑷ 当m M 时,有 cosaq) ?cos 2oq m 2 (2) —维双原子链在 m M 时的解 2 ^sin 20q m 2 2 4 2 aq 2a 2a cos - m 2 与一维单原子链的解 是 --- 对应的。 2 4 sin 2 凹 m 2 NaCl 红外吸收频率的测量只值 61进行
1对一维简单格子晶体,其晶格振动仅存在(声学)波,而一维复式晶体振动既有(声学)波,又有(光学)波 2在一维单原子链的晶格振动中,有(1)支声学波、(0)支光学波。 3声子是(晶格振动的能量量子化),其能量和准动量分别为 ()。 4晶格振动的能量量子称为( 声子)。 5对于三维包含有N个原胞的某晶体,每个晶体中含n 个原子,则其格波数为(3Nn),其中光学波支数为((3n-3)N),声学支数为(3N)。 6长光学支格波与长声学支格波本质上有何差别? 长光学支格波的特征是每个原胞内的不同原子做相对振动,振动频率较高,它包含了晶格振动频率最高的振动模式. 长声学支格波的特征是原胞内的不同原子没有相对位移, 原胞做整体运动, 振动频率较低, 它包含了晶格振动频率最低的振动模式, 波速是一常数. 任何晶体都存在声学支格波, 但简单晶格(非复式格子)晶体不存在光学支格波 7温度一定,一个光学波的声子数目多呢,还是声学波的声子数目多? 8对同一个振动模式,温度高时的声子数目多呢,还是温度低时的声子数目多呢? [解答]设温度TH〉TL,由于(e?ω/kBTH,所以对同一个振动模式,温度?1)大于(e?ω/kBTL?1)高时的声子数目多于温度低时的声子数目。 9晶体中声子数目是否守恒? 频率为ω1的格波的(平均) 声子数为即每一个格波的声子数都与温度有关,因此,晶体中声子数目不守恒,它是温度的变量。 10晶格比热容的爱因斯坦模型和德拜模型采用了什么简化假设?各取得了什么成就?各有什么局限性?为什么德拜模型在极低温度下能给出精确结果?
11考虑一双原子链的晶格振动,链上最近邻原子间的力常数交错地等于c和10c,令两种原子的质量相等,并且最近邻的间距是a/2,试求k=0和k=π/a处的ω(k),并粗略画出色散关系。本题模拟双原子分子晶体,如H2等。
第三章 晶格振动与晶体的热力学函数 一、 填空体 1. 若在三维空间中,晶体由N 个原胞组成,每个原胞有一个原子,则共有_ 3 N_个独立的 振动,_ N__个波矢, 3N_支格波。 2. 体积为V 的ZnS 晶体,如果晶胞的体积为Ω,则晶格振动的模式书为24N/Ω 。 3. 三维绝缘体晶体的低温比热Cv 与温度T 的关系为Cv~T 3。 4. 某三维晶体由N 个原胞组成,每个原胞内有3个原子。考虑晶体的晶格振动,其色散关系共有 9N 支,其中 3N 支声学波,包括 2N 支横声学波, 1N 支纵声学波;另有 6N 支光学波。 5. 二维绝缘体晶体的低温比热Cv 与温度T 的关系为Cv~T 2。 6. 一维绝缘体晶体的低温比热Cv 与温度T 的关系为Cv~T 。 7. 三维绝缘体晶体的低温平均内能与温度T 的关系为U~T 4。 8.二维绝缘体晶体的低温平均内能与温度T 的关系为U~T 3。 9. 一维绝缘体晶体的低温平均内能温度T 的关系为U~T 2。 10.绝缘体中与温度有关的内能来源于 晶格振动能 。 11.导体中与温度有关的内能来源于 晶格振动能 和 价电子热运动动能 。 12. 某二维晶体由N 个原胞组成,每个原胞内有2个原子。考虑晶体的晶格振动,其色散关系共有 4N 支,其中 2N 支声学波,包括 N 支横声学波, N 支纵声学波;另有 2N 支光学波。 13. 某一维晶体由N 个原胞组成,每个原胞内有3个原子。考虑晶体的晶格振动,其色散关系共有 3N 支,其中 N 支声学波,包括 N 支横声学波, 0 支纵声学波;另有 2N 支光学波。 14.晶格振动的元激发为 声子 ,其能量为 ω ,准动量为 q 。 15德拜模型的基本假设为:格波作为弹性波、 介质是各向同性介质。 16.对三维体积为V 的晶体,波矢空间中的波矢密度为: 3 ) 2(V π ;对二维面积为S 的晶体,波矢空间中的波矢密度为:2 )2(S π ;对一维长度为L 的晶体,波矢空间中的波矢密度为: π 2L 。 二、基本概念 1. 声子 晶格振动的能量量子。 2.波恩-卡门条件 即周期性边界条件,设想在实际晶体外,仍然有无限多个相同的晶体相连接,各晶体中相对应的原子的运动情况都一样。 3.波矢密度 波矢空间单位体积内的波矢数目,三维时为3 c )2(V π,Vc 为晶体体积。 4. 模式密度 单位频率间隔内模式数目。 5.晶格振动。 答:由于晶体内原子间存在着相互作用,原子的振动就不是孤立的,而要以波的形式在晶体中传播,形成所谓格波,因此晶体可视为一个互相耦合的振动系统,这个系统的运动就叫晶格振动。
3.1 在单原子组成的一维点阵中,若假设每个原子所受的作用力左右不同,其力常数如图所示相间变化,且21 ββ>。 试证明在这样的系统中,格波仍存在着声频支和光频支,其格波频率为 ?? ??????????????+-±+=212 21221212 )2(sin 411M )(ββββββωqa 证明: 第2n 个原子所受的力 1 21122221212121222)()()(-+-++++-=-+-=n n n n n n n n u u u u u u u F ββββββ 第2n+1个原子所受的力 n n n n n n n n u u u u u u u F 22121122112221222112)()()(ββββββ+++-=-+-=++++++ 这两个原子的运动方程: 2122221121 21122112222()()n n n n n n n n mu u u u mu u u u ββββββββ+-+++=-+++=-+++&&&& 方程的解 ????? ? +-+? ???? ? -==q a n t i n q a n t i n Be u Ae u 2)12(122)2(2ωω 代入到运动方程,可以得到
B A e e B m A B e e A m q a i q a i q a i q a i )()(21222122122212ββββωββββω+-??? ? ??+=-+-??? ? ??+=--- 经整理,有 0)(0)(22122212221221=-+-??? ? ?? +=??? ? ??+--+--B m A e e B e e A m q a i q a i q a i q a i ωββββββωββ 若A ,B 有非零解,系数行列式满足 222 12 122 2 21212,0,a a i q i q a a i q i q m e e e e m ββωββββββω--+-+=++- 根据上式,有 ? ? ??????????????+-±+=212 21221212 )2(sin 411M )(ββββββωqa 3.3 (a) 设单原子链长度L=Na 波矢取值2q h Na π =? 每个波矢的宽度2q Na π=,状态密度 2Na π dq 间隔内的状态数2Na dq π ,对应±q ,ω取相同值 因此()22Na dq dq ρωπ =? 一维单原子链色散关系,2aq ω?? = ??? 令 00sin 2aq ωωω?? = = ???
第一章晶体结构 1.试述晶态、非晶态、准晶、多晶和单晶的特征性质。 解:晶态固体材料中的原子有规律的周期性排列,或称为长程有序。非晶态固体材料中的原子不是长程有序地排列,但在几个原子的范围内保持着有序性,或称为短程有序。准晶态是介于晶态和非晶态之间的固体材料,其特点是原子有序排列,但不具有平移周期性。 另外,晶体又分为单晶体和多晶体:整块晶体内原子排列的规律完全一致的晶体称为单晶体;而多晶体则是由许多取向不同的单晶体颗粒无规则堆积而成的。 2.晶格点阵与实际晶体有何区别和联系? 解:晶体点阵是一种数学抽象,其中的格点代表基元中某个原子的位置或基元质心的位置,也可以是基元中任意一个等价的点。当晶格点阵中的格点被具体的基元代替后才形成实际的晶体结构。晶格点阵与实际晶体结构的关系可总结为: 晶格点阵+基元=实际晶体结构 3.晶体结构可分为Bravais格子和复式格子吗? 解:晶体结构可以分为Bravais格子和复式格子,当基元只含一个原子时,每个原子的周围情况完全相同,格点就代表该原子,这种晶体结构就称为简单格子或Bravais格子;当基元包含2个或2个以上的原子时,各基元中相应的原子组成与格点相同的网格,这些格子相互错开一定距离套构在一起,这类晶体结构叫做复式格子。 4.图1.34所示的点阵是布喇菲点阵(格子)吗?为什么?如果是,指明它属于那类布喇菲格子?如果不是,请说明这种复式格子的布喇菲格子属哪类? (a)(b)(c)(d) 图1.34 (a)“面心+体心”立方;(b)“边心”立方;(c)“边心+体心”立方;(d)面心四方解:(a)“面心+体心”立方不是布喇菲格子。 从“面心+体心”立方体的任一顶角上的格点看,与它最邻近的有12个格点;从面心任一点看来,与它最邻近的也是12个格点;但是从体心那点来看,与它最邻近的有6个格点,所以顶角、面心的格点与体心的格点所处的几何环境不同,即不满足所有格点完全等价的条件,因此不是布喇菲格子,而是复式格子,此复式格子属于简立方布喇菲格子。 (b)“边心”立方不是布喇菲格子。 从“边心”立方体竖直边心任一点来看,与它最邻近的点子有八个;从“边心”立方体水平边心任一点来看,与它最邻近的点子也有八个。虽然两者最邻近的点数相同,距离相等,但他们各自具有不同的排列。竖直边心点的最邻近的点子处于相互平行、横放的两个平面上,而水平边心点的最邻近的点子处于相互平行、竖放的两个平面上,显然这两种点所处的几何环境不同,即不满足所有格点完全等价的条件,因此不是布喇菲格子,而是复式格子,此复式格子属于简立方布喇菲格子。 (c)“边心+体心”立方不是布喇菲格子。
第一章固体结构 1、结合键 离子键:正负离子间的库仑力—键合很强,无方向性。 一次键共价键:核间库仑力—方向性,饱和性。 金属键:正离子与自由电子间库仑力—无方向性,无饱和性。 氢键:氢原子核与极性分子间的库仑引力—方向性,饱和性。 二次键 结合键 范德瓦尔斯键:原子瞬时电偶极矩的感应作用—无方向性。 确定键类型因素:电负性,电负差值。 离子键:硬度大,强度大,脆性大 不同键的性能共价键:硬度大,强度大,脆性大 金属键:塑韧性好,强韧性高,导电导热性好 二次键:强硬度低 考点1:键的概念 【例题1-1-1】 (1)金属键:_____ 。(大连理工大学2011,北京工业大学2016,合工大2013,厦门大学2013) (2)化学键与金属键:_____。(哈尔滨工程大学2016) (3)辨析金属键与共价键:_____。 (南京航空航天2013) 解析: (1)金属正离子与自由电子之间的相互作用所构成的金属原子间的结合键称为金属键。 (2)化学键是纯净物分子内或晶体内相邻两个或多个原子(或离子)间强烈的相互作用力的统称。使离子相结合或原子相结合的作用力通称为化学键。金属键同上。 (3)异:电子公用范围不同,金属键中电子属所有原子共用,共价键中属若干原子共用。同:成键方式为电子共用。 【练习题1-1-2】 (1)主要化学键:金刚石_____;镍_____;MgO_____;聚乙烯_____;SiO2_____ (四川大学2016) (2)什么是金属键?金属为什么具有良好的导电性和导热性?(山东大学2014)
(3)下列对金属键描述正确的是()。(浙工大2013) A、无方向性和饱和性 B、有方向性和饱和性 C、有方向性无饱和性 D、无方向性有饱和性 【练习题1-1-3】简述共价键的特性,并说明多原子分子体系中以杂化轨道形成的共价键与材料晶体结构的关系。(北京工业大学2013) 【练习题1-1-4】 (1)共价键的特点是以原子的形式_____,具有_____性和_____性。(郑州大学2013) (2)氢键是何种类型的键?常见于何种物质、材料之中?对材料的性能会有什么影响? (北京工业大学2014) (3)高分子材料中的化学键有哪几种?(湖南大学2013) 考点2:结合键 【例题1-1-5】固体材料中有几种原子结合键,哪些为一次键,哪些为二次键?(南京航空航天2013) 解析: 材料的许多性能在很大程度上取决于原子结合键。根据结合力的强弱可把结合键分为两大类。一次键:结合力较强(依靠外壳层电子转移或共享而形成稳定的电子壳层),包括离子键、共价键和金属键。二次键:结合力较弱(依靠原子之间的偶极吸引力结合而成),包括分子键和氢键。 【练习题1-1-6】 (1)原子间的结合键共有几种?各自的特点如何?(中国海洋大学2014) (2)从结合键和晶体结构上比较金刚石、石墨、石墨烯、碳纳米管、富勒烯。 (清华大学2015) 【练习题1-1-7】简述一次键和二次键的本质特点,并从结合键的角度讨论金属的力学特征。 (湖南大学2012) 【练习题1-1-8】 (1)试从结合键的角度分析金属材料的塑性或延展性优于无机非金属材料的原因。 (湖南大学2013,西北工业大学2013) (2)比较金属材料、陶瓷材料、高分子材料和复合材料在结合键上的差别。(华南理工大学2016) 考点3:键与性能的关系
第三章 晶格振动与晶体的热力学函数 一、填空体 1. 若在三维空间中,晶体由N 个原胞组成,每个原胞有一个原子,则共有_ 3 N_个独立的 振动,_ N__个波矢, 3N_支格波。 2. 体积为V 的ZnS 晶体,如果晶胞的体积为Ω,则晶格振动的模式书为24N/Ω 。 3. 三维绝缘体晶体的低温比热Cv 与温度T 的关系为Cv~T 3。 4. 某三维晶体由N 个原胞组成,每个原胞内有3个原子。考虑晶体的晶格振动,其色散关系共有 9N 支,其中 3N 支声学波,包括 2N 支横声学波, 1N 支纵声学波;另有 6N 支光学波。 5. 二维绝缘体晶体的低温比热Cv 与温度T 的关系为Cv~T 2。 6. 一维绝缘体晶体的低温比热Cv 与温度T 的关系为Cv~T 。 7. 三维绝缘体晶体的低温平均内能与温度T 的关系为U~T 4。 8.二维绝缘体晶体的低温平均内能与温度T 的关系为U~T 3。 9. 一维绝缘体晶体的低温平均内能温度T 的关系为U~T 2。 10.绝缘体中与温度有关的内能来源于 晶格振动能 。 11.导体中与温度有关的内能来源于 晶格振动能 和 价电子热运动动能 。 12. 某二维晶体由N 个原胞组成,每个原胞内有2个原子。考虑晶体的晶格振动,其色散关系共有 4N 支,其中 2N 支声学波,包括 N 支横声学波, N 支纵声学波;另有 2N 支光学波。 13. 某一维晶体由N 个原胞组成,每个原胞内有3个原子。考虑晶体的晶格振动,其色散关系共有 3N 支,其中 N 支声学波,包括 N 支横声学波, 0 支纵声学波;另有 2N 支光学波。 14.晶格振动的元激发为 声子 ,其能量为 ω ,准动量为 q 。 15德拜模型的基本假设为:格波作为弹性波、 介质是各向同性介质。 16.对三维体积为V 的晶体,波矢空间中的波矢密度为: 3 ) 2(V π ;对二维面积为S 的晶体,波矢空间中的波矢密度为: 2 )2(S π ;对一维长度为L 的晶体,波矢空间中的波矢密度为: π 2L 。 二、基本概念 1. 声子 晶格振动的能量量子。 2.波恩-卡门条件
第三章晶格振动与晶体的热力学函数 一、填空体 1. 若在三维空间中,晶体由N个原胞组成,每个原胞有一个原子,则共有_ 3 N_个独立的 振动,_ N__个波矢, 3N_支格波。 2. 体积为V的ZnS晶体,如果晶胞的体积为Ω,则晶格振动的模式书为24N/Ω。 3. 三维绝缘体晶体的低温比热Cv与温度T的关系为Cv~T3。 4. 某三维晶体由N个原胞组成,每个原胞内有3个原子。考虑晶体的晶格振动,其色散关系共有 9N 支,其中 3N 支声学波,包括 2N 支横声学波, 1N 支纵声学波;另有 6N 支光学波。 5. 二维绝缘体晶体的低温比热Cv与温度T的关系为Cv~T2。 6. 一维绝缘体晶体的低温比热Cv与温度T的关系为Cv~T。 7. 三维绝缘体晶体的低温平均内能与温度T的关系为U~T4。 8.二维绝缘体晶体的低温平均内能与温度T的关系为U~T3。 9. 一维绝缘体晶体的低温平均内能温度T的关系为U~T2。 10.绝缘体中与温度有关的内能来源于晶格振动能。 11.导体中与温度有关的内能来源于晶格振动能和价电子热运动动能。 12. 某二维晶体由N个原胞组成,每个原胞内有2个原子。考虑晶体的晶格振动,其色散关系共有 4N 支,其中 2N 支声学波,包括 N 支横声学波, N 支纵声学波;另有 2N 支光学波。 13. 某一维晶体由N个原胞组成,每个原胞内有3个原子。考虑晶体的晶格振动,其色散关系共有 3N 支,其中 N 支声学波,包括 N 支横声学波, 0 支纵声学波;
另有 2N 支光学波。 14.晶格振动的元激发为 声子 ,其能量为 ωη ,准动量为 q ρ η 。 15德拜模型的基本假设为:格波作为弹性波、 介质是各向同性介质。 16.对三维体积为V 的晶体,波矢空间中的波矢密度为: 3 ) 2(V π ;对二维面积为S 的晶体,波矢空间中的波矢密度为: 2 )2(S π ;对一维长度为L 的晶体,波矢空间中的 波矢密度为: π 2L 。 二、基本概念 1. 声子 晶格振动的能量量子。 2.波恩-卡门条件 即周期性边界条件,设想在实际晶体外,仍然有无限多个相同的晶体相连接,各晶体中相对应的原子的运动情况都一样。 3.波矢密度 波矢空间单位体积内的波矢数目,三维时为3 c )2(V π,Vc 为晶体体积。 4. 模式密度 单位频率间隔内模式数目。 5.晶格振动。 答:由于晶体内原子间存在着相互作用,原子的振动就不是孤立的,而要以波的形式在晶体中传播,形成所谓格波,因此晶体可视为一个互相耦合的振动系统,这个系统的运动就叫晶格振动。
第一章晶体结构1.晶格实例 1.1面心立方(fcc)配位数12 格点等价格点数4 致密度0.74 原胞基矢: () () () 1 2 3 2 2 2 a a j k a a k i a a i j =+ =+ =+ v v v v v v v v v 原胞体积3 123 ()/4 Ωa a a a =??= v v v NaCl: 两组面心立方格子平行穿套而成的复式格子基元= Na+ + Cl- 具有面心立方:简单格子(Al、Cu、Ag;Ar Kr Xe Ne)、复式格子(Cao MgS 碱卤族等) 1.2简单立方(SC)配位数6 格点等价格点数1 致密度0.52 CsCl两组简单立方格子穿套而成的复式结构基元= Cs+ + Cl- 钙钛矿结构:CaTiO3五个简单立方穿套而成基元:Ca、Ti、OI、OII、OIII (OI、OII、OIII 的化学环境各不相同,氧八面体) 典型晶体:BaTiO3、PbZrO3、LiNbO3、LiTaO3?? 氯化铯型结构:CsCl, CsBr, CsI, TlCl, TlBr, TlI 等 1.3体心立方(bcc)配位数8 格点等价格点数2 致密度0.68 原胞基矢: 1 2 3 () 2 () 2 () 2 a a i j k a a i j k a a i j k =-++ =-+ =+- v v v v v v v v v v v v 原胞体积:3 123 ()/2 Ωa a a a =??= v v v 体心立方晶体: 碱金属、W、Mo、Nb、V、Fe等 1.4六角密堆(hcp)配位数12 两种格点原子数6 基元数3 致密度0.74 典型晶体举例:He, Be, Mg, Ti, Zn, Cd, Co, Y, Lu 等 1.5金刚石结构最近邻原子数4 次近邻原子数12 致密度0.34 晶体结构=布拉维格子(面心立方)+ 基元(A+B) *将金刚石结构中的基元置换成一对硫离子和锌离子,则为两个面心立方复合而成的复式结构,典型晶体:SiC, ZnSe, AlAs, GaP, GaAs 等 2.晶体的周期性结构 2.1基本概念 晶体:1. 化学性质相同 2. 几何环境相同
第一章 固体结构 1.1 习题 1. 金属键、离子键、共价键和分子键的主要区别是什么?为什么金属具有良好的导电性、导热性、良好的延展性和金属光泽? 2. 何谓原子间结合力,原子间结合能?何谓激活能?试用三原子作用模型(或双原子模型)说明,金属中的原子为什么呈周期性的规则排列,而且是紧密的排列? 3. 解释名词:晶体、非晶体、单晶体、多晶体、晶粒。 4. 何谓空间点阵、晶格、晶体结构和晶胞?常用金属的晶体结构是什么?画出其晶胞,并分别计算其原子半径、配位数和致密度。 5. 面心立方和密排六方晶格都是最紧密排列方式,绘图说明它们的排列方式有何不同? 6. 体心六方晶格是次紧密排列方式,绘图说明它的排列特点。 7. 何谓晶面、晶向,它们的表示方法如何?立方晶格的晶面指数和晶向指数如何确定? 8. 密排六方晶格的晶面指数和晶向指数如何确定? 9. 在六方晶格中,当某一晶向和某一晶面垂直时,它们的密勒指数有何特点? 10.在立方晶格中,当某一晶向位于(或平行于)某一晶面时,它们的密勒指数有何特点? 11.已知立方晶格的某一晶面的密勒指数,如何写出空间位向不同,但原子排列情况与其完全相同的所有晶面的密勒指数? 12.已知立方晶格的某一晶向的密勒指数,如何写出与其原子排列情况相同但空间位向不同的其他晶向的密勒指数? 13.何谓理想晶体和实际晶体?为什么单晶体呈各向异性而多晶体在大多数情况下没有各向异性现象? 14.何谓同素异晶转变?试以铁为例说明之? 1.2思考题 1. 画出立方晶格的下列密勒指数的晶面和晶向: a. (001)与[210] b. (110)与[111] c. (321)与[214] 2. 某晶体的原子位于正方晶格的结点上,晶胞的三个棱边长分别为:a=b,c=23 a 。今有一晶面在X 、Y 和Z 轴上的截距分别位5个原子截距、2个原子截距和3个原子截距,试求该晶面的密勒指数。 3. 计算面心立方晶格中下述晶面的致密度,并指出哪个晶面的致密度高: a. (111) b. (110) c. (100) 4. 试证明:理想密集六方晶格的轴比c/a=1.633。 5. 已知铁和铜在室温下的晶格常数分别为2.86°A 和3.607° A ,求1cm 3中铁和铜的原子数。