
a r X i v :n l i n /0406027v 1 [n l i n .C D ] 15 J u n 2004
Estimation of System Parameters and Predicting the Flow Function from Time Series of Continuous Dynamical Systems
P.Palaniyandi 1and https://www.doczj.com/doc/c18330973.html,kshmanan 2
Centre for Nonlinear Dynamics,Department of Physics Bharathidasan University,
Tiruchirapalli 620024,India
Time series analysis (both vector and scalar)is of considerable relevance [1,2,3]to physical,chemical and biological systems as they very often exhibit tem-poral chaotic motions.The main objective of time series analysis is to study the detailed structure of the evolution equation of the underlying dynamical system.This includes the number of independent variables,the form of the ?ow functions and parameters involved in the system.In this Letter,the study is focussed on the last aspect,namely,estimating the system parameters from the time series when partial information about the system is known (the num-ber of independent variables and the form of the ?ow functions),and then the study is extended to predict the form of the ?ow function itself when it
is not known.A few methods have been proposed[1,2,3]in the literature for predicting the form of the?ow functions.These include two point boundary value problem approach[4],Euler integration approach to odes[1]and modi-?cations[5].Also recent literature shows that the methods already proposed for estimating the system parameters are based on the concept of synchro-nization[6,7,8,9,10],Bayesian approach[11,12],least squares approach[13] and by successive integration method[14].In this Letter,a very simple and e?cient method for estimating the system parameters as well as the form of the?ow functions of continuous dynamical systems from the vector time series is developed using the concept of controlling chaos[15,16,17],which can also in principle be extended to scalar time series.In our method we construct a modi?ed system by inclusion of certain constants(controlling constants)in the given original system so that the evolution of the modi?ed system is con-trolled to an equilibrium point.Then we?nd the dynamical relation between the original and modi?ed systems and thereby determine the unknown system parameters and the controlling constants.After accomplishing this task,the method is extended to determine the form of the evolution equations(?ow functions)itself for the system from which the time series was collected.This method is applicable to time series obtained from a continuous system of any dimensions and is also well suited for discrete dynamical systems as shown in ref.[18]earlier.The method can also be used for the time series which contains considerable amount of noise.Further this method can be used in the?eld of controlling chaos to?nd the exact values of controlling constants to make the given chaotically evolving system to be controlled to a required equilibrium point.
Consider an arbitrary N-dimensional continuous chaotic dynamical system (the original system),
˙x i=f i(x1,x2,...,x N;p),(1) where i=1,2,3,...N,and p denotes the system parameters of dimension M to be determined.Here we assume that the function f is su?ciently smooth.Let us construct a modi?ed continuous dynamical system(the modi?ed system) as
˙y i=f i(y1,y2,...,y N;p)+κi,i=1,2,...,N,(2) whereκi’s are constants(controlling constants).The crucial idea here is that the Jacobian matrix which determines the stability of the equilibrium point is the same for both the cases,namely the original and the modi?ed systems.In fact,the inclusion ofκi’s in Eq.(2)makes the modi?ed system to have an equi-librium point(either stable or unstable)which is e?ectively di?erent from the equilibrium point(unstable)of the original system eventhough the Jacobian
matrix is not a?ected as stated above.From an examination of many maps and?ows we have found that there is in general a possibility of making the modi?ed system(2)to exhibit a stable equilibrium point by suitable inclusion of constantsκi eventhough the original system(1)evolves chaotically.
Let u i(t)be the deviation,that is,u i(t)=y i(t)?x i(t),of the trajectory of the modi?ed system from that of the original system due to the e?ect of controlling constants(κi’s).After substituting the above relation in Eq.(2) and making use of Taylor expansion,we obtain
˙u i=κi+
N
j=1
u j
?f i
2
N
j=1
N
k=1
u j u k
?2f i
from the?rst data of the time series.It may be noted that here,u i’s are func-tions of the parameters p and controlling constantsκi,since the derivatives of u i’s are having speci?c functional relations with the same parameters and controlling constants through Eq.(3).Also,u(n)i’s are obtained by solving Eq.
(3)numerically with time interval?t(or submultiples of?t).In general,for a given set of time series data collected from the system(1)for a particlular set of parameters,the right hand side of Eq.(6),that is,the equilibrium point, depends on the value of controlling constants(κi’s)which can be varied by means of u(0)i.This freedom allows us to make any desired point in the region of the attractor of the system as equilibrium point(y?i)by choosing the values for u(0)i accordingly.For example,one can easily have z(0)i as an equilibrium point by setting u(0)i=0in Eq.(6).Similarly,an arbitrary point q i in the attractor can be chosen as an equilibrium point if we start with u(0)i=q i?z(0)i.
Now it is possible to obtain the required number(M+N,N forκi’s and M for p’s)of functional relations(implicit)between the unknown parameters and controlling constants through Eq.(6).Once we have the required number of functional relations,the next task is to solve them for the unknowns,that is forκi’s and p’s,using a suitable numerical technique,for example by the globally convergent Newton’s method[19].
After estimating the values of the parameters,its accuracy can be checked as https://www.doczj.com/doc/c18330973.html,pare the equilibrium point(for example y?i=z(0)i if we assume u(0)i=0in Eq.(6))assumed to be exhibited by the modi?ed system in the above procedure with the equilibrium point calculated from Eq.(2)with the values of parameters determined by the above method.The degree of close-ness of these equilibrium points gives a measure of accuracy of the estimated parameters.
As an illustration to our method,let us consider the Lorenz system
˙x1=σ(x2?x1),(7a)˙x2=ρx1?x2?x1x3,(7b)˙x3=x1x2?bx3,(7c) whereσ,ρand b are the unknown system(control)parameters.Then the modi?ed Lorenz system can be constructed as
˙y1=σ(y2?y1)+κ1,(8a)˙y2=ρy1?y2?y1y3+κ2,(8b)˙y3=y1y2?by3+κ3,(8c) whereκ1,κ2andκ3are constants to be determined which make(8)to exhibit equilibrium point solution while the original system(withκ1=κ2=κ3=0)
-30
-20-10 0 10 20 30 40 0 5 10 15 20 25 30 35 40 45 50
P a r a m e t e r s Iterations
σρb
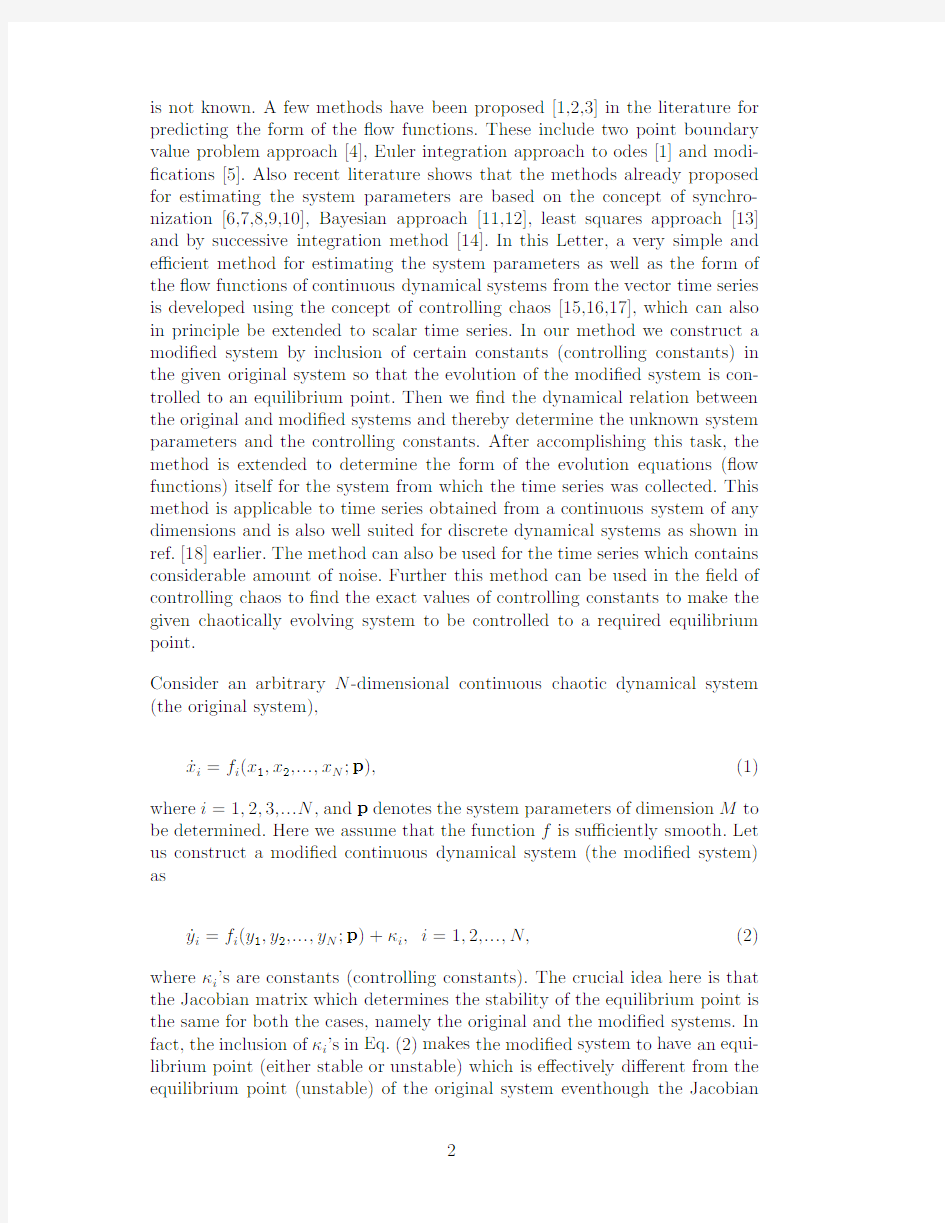
Fig.1.Convergence of the parameters σ,ρand b towards their exact values in the Lorenz system.
exhibits chaotic solution.Then the equation (3)for the deviations,u i =y i ?x i ,i =1,2,3,becomes
˙u 1=σ(u 2?u 1)+κ1,(9a)
˙u 2=(ρ?x 3)u 1?u 2?(x 1+u 1)u 3+κ2,(9b)˙u 3=(x 2+u 2)u 1+x 1u 2?bu 3+κ3.
(9c)
It may be noted that the presence of x 1,x 2and x 3in (9)indicates that one has to solve Eqs.(7)&(9)simultaneously.
Let (z 01,z 02,z 03),(z 11,z 12,z 1
3),...,(z (m ?1)
1,z (m ?1)
2,z (m ?1)
3)be the time series data obtained from the Lorenz system at some arbitrary time interval with the
sampling rate ?t for an unknown set of system parameters.After assuming z (0)
i as the equilibrium point for the modi?ed Lorenz system (that is by assigning u (0)i =0in Eq.(6),so that y ?i =z (0)i )and substituting three data points z (0)i ,z (1)i and z (2)
i (one can in fact take any three successive data points but the ?rst data point has to be used as initial condition for x i )in Eq.(6),we get
z (1)1+u (1)1=z (0)
1,z (1)2+u (1)2=z (0)
2,z (1)3+u (1)3=z (0)
3,z (2)
1+u (2)
1=z (0)
1,
z (2)
2+u (2)
2=z (0)
2,
z (2)
3+u (2)
3=z (0)
3.
(10)
Note that the time derivatives of u i ’s have speci?c functional relations with the unknown parameters (σ,ρand b )and controlling constants (κ1,κ2and κ3)through Eq.(9),and hence u i ’s are also functions of the same parameters and controlling constants.Now we have six (implicit)functional relations for
50 100 150 200 250 8.5
9
9.5 10 10.5 11
11.5
50
100 150 200 250 26.5 27 27.5 28 28.5 29
29.5
50
100 150 200 2 2.2 2.4 2.6 2.8 3 3.2
3.4
σρ
b
Fig.2.The distribution of the values of the system parameters estimated from the time series which contains random dynamical noise in the Lorenz system.
the six unknowns namely σ,ρ,b ,κ1,κ2and κ3through Eq.(10),in terms
of the equilibrium point (here z (0)i )and the two sets of data points z (1)
i and z (2)
i ,i =1,2,3.To solve for these unknowns,we have to obtain values of u (1)1,u (1)2,u (1)3,u (2)1,u (2)2and u (2)
3by solving Eqs.(7)&(9)simultaneously so that Eq.(10)is satis?ed.This can be done,for example,by the globally convergent Newton’s method [19]provided an initial guess is given to all the
unknown parameters.In this example,while obtaining the value of u (1)
i initial
conditions should be taken as x (0)i =z (0)i and u (0)
i =0,respectively.Further,
the evaluation of u (2)i needs to reset x (1)
i =z (1)i in the numerical algorithm used above.Similar procedure has to be followed if any other set of successive data
is used in place of z (0)i ,z (1)i and z (2)
i in Eq.(10).For illustration purpose,we have used the numerically generated time series of the Lorenz system for the system parameters σ=10.0,ρ=28.0and b =8/3and solved the Eq.(10)by globally convergent Newton’s method with an initial guess 1.0to all the unknowns κ1,κ2,κ3,σ,ρand b .The convergence of the system parameters and controlling constants (κ’s)is shown in the Table I,which shows that the estimated values are indeed the exact values of the parameters at which the time series data of the Lorenz system is generated.We also note that the convergence is very rapid,which is further con?rmed in Fig.(1).Note that if we take a di?erent set of data points from the time series as the equilibirium point,the corresponding controlling contstants (κi ’s)will be di?erent eventhough the system parameters are unaltered.
In order to show that our method is robust,a time series which contains random dynamical noise of strength 10?3was additionaly introduced in the above Lorenz model.In this case,the distribution of the values of the system parameters estimated using 1000data points is shown in ?g.(2).Also in the case of random observational noise of same strength,the distribution of the values of the parameters is shown in ?g.(3).The peaks about the true values of the parameters in the above two ?gures indicate that our method works extremely well even in the presence of dynamical noise or in the presence observational noise in the time series.
50
100 150 8.5 9 9.5 10 10.5 11
11.5 50
100
150 200 26.5 27 27.5 28 28.5 29
29.5
50
100
150
1.5 2
2.5
3 3.5
4
b
σρ
Fig.3.The distribution of the values of the system parameters estimated from the time series which contains random observational noise in the Lorenz system.
We have also carried out a similar analysis for the autonomous Chua’s Circuit [16]in its dimensionless form,
˙x 1=α(x 2?x 1?h (x 1)),(11a)
˙x 2=x 1?x 2+x 3,(11b)˙x 3=?βx 2,(11c)
where
h (x )=bx +0.5(a ?b )(|x +1|?|x ?1|),
αand βare parameters to be determined,and for the R¨o ssler system,
˙x 1=?(x 2+x 3),(12a)
˙x 2=x 1+ax 2,(12b)˙x 3=b +(x 1?c )x 3,(12c)
where a ,b and c are the parameters to be determined.In both the cases,we are able to obtain the correct values of the parameters as in the case of the Lorenz system.
Next,we wish to point out that it is also possible to extend the analysis to predict the ?ow function of the system itself in principle,by assuming a poly-nomial form (here as an illustration)for the functions f i (x 1,x 2,...x N ;p )in the right hand side of Eq.(1),with unknown coe?cients,and solving su?cient number of Eqs.(6)to determine them.One can as well choose other types basis functions and our procedure is equally applicable here also.To illustrate this idea,let us consider the same time series data used in the above exam-ple of Lorenz system and assume that the form of the underlying dynamical equations is unknown.Let us assume a general quadratic form for the ?ow function (dynamical equations)as
˙x1=c1x1+c2x2+c3x3+c4x1x2+c5x2x3+c6x1x3,(13a)˙x2=c7x1+c8x2+c9x3+c10x1x2+c11x2x3+c12x1x3,(13b)˙x3=c13x1+c14x2+c15x3+c16x1x2+c17x2x3+c18x1x3,(13c) where c i’s,i=1,2,...18,are parameters to be determined from the time series data.Again following the method suggested above,we write the form of the modi?ed system as
˙y1=c1y1+c2y2+c3y3+c4y1y2+c5y2y3+c6y1y3+κ1,(14a)˙y2=c7y1+c8y2+c9y3+c10y1y2+c11y2y3+c12y1y3+κ2,(14b)˙y3=c13y1+c14y2+c15y3+c16y1y2+c17y2y3+c18y1y3+κ3,(14c) whereκ1,κ2andκ3are again the controlling constants to be determined so that the above modi?ed dynamical system exhibits a stable equilibrium point. For this system,Eq.(3)becomes
˙u1=κ1+c1u1+c2u2+c3u3+(c4x2+c6x3+c4u2)u1
+(c4x1+c5x3+c5u3)u2+(c5x2+c6x1+c6u1)u3,(15a)˙u2=κ2+c7u1+c8u2+c9u3+(c10x2+c12x3+c10u2)u1
+(c10x1+c11x3+c11u3)u2+(c11x2+c12x1+c12u1)u3,(15b)˙u3=κ3+c13u1+c14u2+c15u3+(c16x2+c18x3+c16u2)u1
+(c16x1+c17x3+c17u3)u2+(c17x2+c18x1+c18u1)u3.(15c) In order to determine the values of the parameters and controlling constants (c i,i=1,2,...18,κ1,κ2andκ3),we have to solve21algebraic equations which are actually constructed by making use of eight successive time series data in Eq.(6)with assumption that the?rst one is the equilibrium point.Then the required equations will be
z(j)i+u(j)i=z(0)i,i=1,2,3and j=1,2,...,7.(16)
Again we follow exactly the steps mentioned earlier for the Lorenz system and obtain the values of the unknown parameters.The distribution of the values of the parameters(c i’s,i=1,2,...,18)obtained by solving Eq.(16) using3000data of time series is shown is Fig.(4).And the values are found to be distributed around{c i}181={?10,10,0,0,0,0,28,?1,0,0,0,?1, 0,0,?2.67,1,0,0}.Substituting these values in Eq.(13)we obtain the?ow function(evolution equation)of the form
˙x1=c1x1+c2x2,(17a)˙x2=c7x1+c8x2+c12x1x3,(17b)˙x3=c15x3+c16x1x2,(17c)
50
100 150 200 250 300 350 400 450-20-18-16-14-12-10-8-6-4-2 0 50
100 150 200 250 300 350 400 450 500 0 2 4 6 8 10 12 14 16 18 20 0
100 200 300 400 500 600 700 800 900 1000-10-8-6-4-2 0 2 4 6 8 10 0 200 400 600 800 1000 1200 1400-8-6-4-2 0 2 4 6 8 10
200
400 600 800 1000 1200 1400-10-8-6-4-2 0 2 4 6 8 10 0
200
400 600 800 1000 1200 1400-10-8-6-4-2 0 2 4 6 8 10 0
100
200 300 400 20 22 24 26 28 30 32 34 36 38 40 0
100 200 300 400 500 600 700 800-10-8-6-4-2 0 2 4 6 8 10
100
200 300 400 500-10-8-6-4-2 0 2 4 6 8 10 0
100 200 300 400 500 600 700 800 900-10-8-6-4-2 0 2 4 6 8 10 0
200
400 600 800 1000 1200 1400-10-8-6-4-2 0 2 4 6 8 10 0
200
400 600 800 1000 1200 1400-10-8-6-4-2 0 2 4 6 8 10 0
200
400 600 800 1000 1200 1400-10-8-6-4-2 0 2 4 6 8 10 0
100
200 300 400 500-100-80-60-40-20 0 20 40 60 80 100 0
100
200 300 400 500-100-80-60-40-20 0 20 40 60 80 100 0
100
200 300 400 500-10-8-6-4-2 0 2 4 6 8 10 0
100
200 300 400 500 600 700-10-8-6-4-2 0 2 4 6 8 10
100
200 300 400 500 600 700-10-8-6-4-2 0 2 4 6 8 10
c1
c2
c3
c4
c5
c6c7c8c9c10c11c12c13c14c15c16c17c18Fig.4.The distribution of the values of the system parameters of the ?ow functions given by Eq.(13),estimated from the time series of Lorenz system
withσ=?c1=c2=10.0,ρ=c7=28.0,b=?c15=2.67and the remaining constants c16=1.0and c8=c12=?1,which is nothing but the original Lorenz system.
Finally,we would like to point out that the procedure outlined above also gives a method to obtain the values of the controlling constants(κi)for a chaotic system to be controlled to a desired equilibrium point if the form of evolution equation is known.
To conclude,we have developed a very simple as well as useful method for estimating the unknown system parameters of the continuous dynamical sys-tems of any dimensions from the vector time series,if partial information is known,namely the form of the dynamical equations.It has also been ex-tended to obtain the form of the system equation itself at least in the case of polynomial forms.Both the methods have been illustrated by means of vector time series collected from the Lorenz system,while further con?rmation has been made with other systems including the Chua’s Circuit and R¨o ssler sys-tems.We have also checked that the method is robust againt dynamical and observational noise and that the procedure exhibits a rapid convergence. Acknowledgements
This work has been supported by the National Board of Higher Mathematics, Department of Atomic Energy,Government of India and the Department of Science and Technology,Government of India through research projects. References
[1]H.D.I.Abarbanel,R.Brown,J.J.Sidorowich and L.S.Tsimring,Rev.Mod.
Phys.65,1331(1993).
[2]H.Kantz and T.Schreiber,Nonlinear Time Series Analysis,(Cambridge
University Press,Cambridge,1997).
[3] C.Diks,Nonlinear Time Series Analysis:Methods and Applications,(World
Scienti?c,Singapore,1999).
[4] E.Baake,M.Baake,H.G.Bock and K.M.Briggs,Phys.Rev.A45,5224
(1992).
[5]R.Brown,N.F.Rulkov and E.R.Tracy,Phys.Rev.E49,3784(1994).
[6]U.Parlitz,Phys.Rev.Lett.76,1232(1996).
[7]U.Parlitz and L.Junge,Phys.Rev.E.54,6253(1996).
[8] A.Maybhate and R.E.Amritkar,Phys.Rev.E59,284(1999).
[9]S.Chen and J.L¨u,Phys.Lett.A299,353(2002).
[10]R.Konnur,Phys.Rev.E67,027204(2003).
[11]R.Meyer and N.Christensen,Phys.Rev.E62,3535(2000).
[12]R.Meyer and N.Christensen,Phys.Rev.E65,016206(2001).
[13]G.L.Baker,J.P.Gollub and J.A.Blackburn,Chaos6,1054(1996).
[14]M.S.Suarez-Casta?n on,C.Aguilar-Ib′a?n ez and F.Flores-Ando,Phys.Lett.A
317,265(2003).
[15]https://www.doczj.com/doc/c18330973.html,kshmanan and S.Rajasekar,Nonlinear Dynamics:Integrability,Chaos
and Patterns,(Springer-Verlag,New York,2003).
[16]https://www.doczj.com/doc/c18330973.html,kshmanan and K.Murali,Chaos in Nonlinear Oscillators:Controlling
and Synchronization,(World Scienti?c,Singapore,1996).
[17]S.Parthasarathy and S.Sinha,Phys.Rev.E51,6239(1995).
[18]P.Palaniyandi and https://www.doczj.com/doc/c18330973.html,kshmanan,nlin.CD/0403058(Submitted for
publication).
[19]W.H.Press,S.A.Teukolsky,W.T.Vellerling and B.P.Flannery,Numerical
Recipes in Fortran,2nd ed.(Cambridge University Press,New York,1992).
---------------------------------------------------------------最新资料推荐------------------------------------------------------ SystemView仿真 二进制振幅键控2ASK systemvi ew仿真院(系): 班级: 学号: 姓名: 指导老师: 二进制振幅键控 2ASK 1、调制系统: 实验原理: 2ASK 的实现二进制不归零信号图 2: 2ASK 调制器原理框图在幅移键控中,载波幅度是随着调制信号而变化的。 一种是最简单的形式是载波在二进制调制信号 1 或 0 控制下通或断,这种二进制幅度键控方式称为通断键控(OOK)。 二进制振幅键控方式是数字调制中出现最早的,也是最简单的。 这种方法最初用于电报系统,但由于它在抗噪声的能力上较差,故在数字通信用的不多。 但二进制振幅键控常作为研究其他数字调制方式的基础。 二进制振幅键控信号的基本解调方法有两种: 相干解调和非相干解调,即包络检波和同步检测。 非相干解调系统设备简单,但信噪比小市,相干解调系统的性能优于相干解调系统。 1 / 3
2ASK 解调器原理框图: 图 3 乘法器coscte2ASK(t)(a)模拟调制法(相乘器法)cosct开关电路s(t)e2ASK(t)(b)通-断键控(OOK,On-Off Keying) s(t)e2ASK(t)BPF全波整流器LPF抽样判决器输出abcd定时脉冲(a)非相干解调(包络检波法)e2ASK(t)BPF相乘器LPF抽样判决器定时脉冲输出Cosct(b)相干解调(同步检测法)系统的相关参数:基带信号 amplitu=0. 5, offset=-0. 5, rate=10。 图 4 输入的调制信号: 图 5 已调信号: 图 6 2 调制解调系统: 系统相关参数: 基带信号频率=50HZ,电平=2,偏移=1,载波频率=1000HZ 模拟低通频率=225HZ,极点数为 3. 系统运行时间为 0. 3S,采样频率=20190HZ。 图 7 模块 3 为原始信号: 图 8 模块 8 为解调后信号: 图 9 模块 4 为已调信号: 图 1 0 功率谱图: Sink3 输入信号图 1 1 Sink8 输出信号: 图 1 2 2ASK 系统调制解调图对比: 图 1 3 图 14 3 系统仿真结果分析: 如图所示调制信号
应用ADS设计微带线带通滤波器 1、微带带通微带线的基本知识 微波带通滤波器是应用广泛、结构类型繁多的微波滤波器,但适合微带结构的带通滤波器结构就不是那么多了,这是由于微带线本身的局限性,因为微带结构是个平面电路,中心导带必须制作在一个平面基片上,这样所有的具有串联短截线的滤波器都不能用微带结构来实现;其次在微带结构中短路端不易实现和精确控制,因而所有具有短路短截线和谐振器的滤波器也不太适合于微带结构。 微带线带通滤波器的电路结构的主要形式有5种: 1、电容间隙耦合滤波器 带宽较窄,在微波低端上显得太长,不够紧凑,在2GHz以上有辐射损耗。 2、平行耦合微带线带通滤波器 窄带滤波器,有5%到25%的相对带宽,能够精确设计,常为人们所乐用。但其在微波低端显得过长,结构不够紧凑;在频带较宽时耦合间隙较小,实现比较困难。 3、发夹线带通滤波器 把耦合微带线谐振器折迭成发夹形式而成。这种滤波器由于容易激起表面波,性能不够理想,故常把它与耦合谐振器混合来用,以防止表面波的直接耦合。这种滤波器的精确设计较难。
4、1/4波长短路短截线滤波器 5、半波长开路短截线滤波器 下面主要介绍平行耦合微带线带通滤波器的设计,这里只对其整个设计过程和方法进行简单的介绍。 2、平行耦合线微带带通滤波器 平行耦合线微带带通滤波器是由几节半波长谐振器组合而成的,它不要求对地连接,结构简单,易于实现,是一种应用广泛的滤波器。整个电路可以印制在很薄的介质基片上(可以簿到1mm以下),故其横截面尺寸比波导、同轴线结构的小得多;其纵向尺寸虽和工作波长可以比拟,但采用高介电常数的介质基片,使线上的波长比自由空间小了几倍,同样可以减小;此外,整个微带电路元件共用接地板,只需由导体带条构成电路图形,结构大为紧凑,从而大大减小了体积和重量。 关于平行耦合线微带带通滤波器的设计方法,已有不少资料予以介绍。但是,在设计过程中发现,到目前为止所查阅到的各种文献,还没有一种能够做到准确设计。在经典的工程设计中,为避免繁杂的运算,一般只采用简化公式并查阅图表,这就造成较大的误差。而使用电子计算机进行辅助设计时,则可以力求数学模型精确,而不追求过分的简化。基于实际设计的需要,我对于平行耦合线微带
1项目概述 1.1竹溪县民政局现状 竹溪县民政局机房现有设备运行年限较长,各业务系统相对独立,造成管理难度大,基于这种现状我司推荐竹溪县民政局信息化启动平台化建设。 竹溪县民政局信息化平台是提高健康水平、提高政府服务质量和效率的有力推手,是规范医疗政府服务,方便群众办事,缓解群众看病难问题的主要手段,不仅对推动竹溪县政务整改工作有重要意义,也是当前竹溪县民政局信息化平台工作迫切的需求。 1.2竹溪县民政局信息化平台建设的基本原则 1)顶层设计,统筹协调原则:竹溪县民政局信息化平台建设要按照国家有 关信息化建设的总体部署和要求,结合竹溪县民政局实际,做好顶层设 计,进行信息资源统筹规划,统一建设规范、标准和管理制度,构建竹 溪县民政局信息化平台为建设目标和任务。运用不同机制和措施,因地 制宜、分类指导、分步推进,促进竹溪县民政局信息化平台工作协调发 展。 2)标准化原则:竹溪县民政局信息化平台建设要在统一标准、统一规范指 导原则下开展,相关技术、标准、协议和接口也须遵循国际、国家、部 颁有关标准,没有上述标准要分析研究,制定出适合竹溪县民政局信息 化平台的标准、规范。 3)开放和兼容性原则:竹溪县民政局信息化平台建设不是一个独立系统, 而是搭建一下通用平台,基于平台承载各类应用系统运行,因此,系统 设计应充分考虑其开放性,同时因发展需要,应具有较好的伸缩性,满 足发展需要。 4)先进性原则:采取业界先进系统架构理念和技术,为系统的升级与拓展 打下扎实基础,如在技术上采用业界先进、成熟的软件和开发技术,面
向对象的设计方法,可视化的面向对象的开发工具,支持 Internet/Ineternet网络环境下的分布式应用;客户/应用服务器/数据 服务器体系结构与浏览器/服务器(B/S)体系相结合的先进的网络计算 模式。 5)安全与可靠的原则:作为竹溪县民政局信息化平台,关乎到民生及医疗 数据安全,其数据库硬件平台必须具备最高的安全性及可靠性,可接近 连续可用。平台一旦出现故障可能会导致群体性事件,因此竹溪县民政 局信息化平台需要建立在一个科学稳定的硬件平台上,并达到系统要求 的安全性和可靠性。二是网络安全。在系统架构和网络结构设计上首先 考虑安全性,必须加强领导、落实责任,综合适用技术、经济、制度、 法律等手段强化网络的安全管理。三是信息安全。主要是数据安全即保 证数据的原始性和完整性,运行数据不可被他人修改或访问,记录者的 记录不容抵赖,访问和修改可追踪性等。在系统设计时既考虑系统级的 安全,又考虑应用级的安全。应用系统采用多级认证(系统级认证、模 块认证、数据库认证和表级认证)等措施,采用用户密码的加密技术以 防止用户口令被破解。同时需制定不断完善的信息系统应急处理预案和 合理的数据库备份策略,在灾难时也能快速从灾难中恢复。四是信息化 平台应具有较强数据I/O处理能力,同时系统在设计时必须考虑在大规 模并发,长期运行条件下的系统可靠性,满足竹溪县民政局信息化7× 24小时的服务要求,保证各机构单位数据交换和资源共享的需要。 6)协调合作原则:要求各有关方将以往的行为方式从独立行事向合作共事 转变,从独立决策向共同决策方式转变。各方在合作基础上,应在人力 资源和设备实体方面全力建立更加稳定的信息技术设施。 1.3平台需求 1.3.1硬件需求 竹溪县民政局信息化平台是支撑整个系统安全、稳定运行的硬件设备和网络设施建设,是系统平台的基础设施。主要包括支撑整个系统安全、稳定运行所需
第四部分System View通信系统仿真实验SystemView及其操作简介 美国ELANIX公司于1995年开始推出SystemView软件工具,最早的1.8版为16bit教学版,自1.9版开始升为32bit专业版,目前我们见到的是4.5版。SystemView是在Windows95/98环境下运行的用于系统仿真分析的软件工具,它为用户提供了一个完整的动态系统设计、仿真与分析的可视化系统软件环境,能进行模拟、数字、数模混合系统、线性和非线性系统的分析设计,可对线性系统进行拉氏变换和Z变换分析。 一、SystemView的基本特点 SystemView基本属于一个系统级工具平台,可进行包括数字信号处理(DSP)系统、模拟与数字通信系统、信号处理系统和控制系统的仿真,并配置了大量图符块(Token)库,用户很容易构造出所需要的仿真系统,只要调出有关图符块并设置好参数,完成图符块间的连线后,运行仿真操作,最终以时域波形、眼图、功率谱、星座图和各类曲线形式给出系统的仿真分析结果。SystemView的库资源十分丰富,主要包括:含有若干图符库的主库(MainLibrary)、通信库(Communications Library)、信号处理库(DSP Library)、逻辑库(LogicLibrary)、射频/模拟库(RF Analog Library)、Matlab连接库(M-Link Library)和用户代码库(Costum Library)。 二、SystemView系统视窗 1、主菜单功能 图1 系统视窗
遵循以下步骤进入SystemView系统视窗: (1)双击SystemView图标,开始启动系统。 (2)首先会出现SystemView License Manager窗口,可用来选择附加库。本实验中选择Selectlall再左键单击OK结束选择。 (3)然后会出现Recent SystemView Files窗口,可用来方便的选择所需打开的文件。在本实验中,左键单击Close结束选择。 完成以上操作,即可进入SystemView系统视窗。如图1所示。 系统视窗最上边一行为主菜单栏,包括:文件(File)、编辑(Edit)、参数优选(Preferences)、视窗观察(View)、便签(NotePads)、连接(Connections)、编译器(Compiler)、系统(System)、 图符块(Tokens)、工具(Tool)和帮助(Help)等11项功能菜单。 执行菜单命令操作较简单,例如,用户需要清除系统时,可单击“File”菜单,出现一个下拉菜单,单击其中的“Newsystem”工具条即可。为说明问题简单起见,将上述操作命令记作:File>>Newsystem,以下类同。各菜单下的工具条及其功能如下表所示: 表1 SvstemView4.5个菜单下的工具条及其功能
实验八 有源滤波器的设计 一.实验目的 1. 学习有源滤波器的设计方法。 2. 掌握有源滤波器的安装与调试方法。 3. 了解电阻、电容和Q 值对滤波器性能的影响。 二.预习要求 1. 根据滤波器的技术指标要求,选用滤波器电路,计算电路中各元件的数值。设计出 满足技术指标要求的滤波器。 2. 根据设计与计算的结果,写出设计报告。 3. 制定出实验方案,选择实验用的仪器设备。 三.设计方法 有源滤波器的形式有好几种,下面只介绍具有巴特沃斯响应的二阶滤波器的设计。 巴特沃斯低通滤波器的幅频特性为: n c uo u A j A 21)(??? ? ??+= ωωω , n=1,2,3,. . . (1) 写成: n c uo u A j A 211) (??? ? ??+=ωωω (2) )(ωj A u 其中A uo 为通带内的电压放大倍数,ωC A uo 为截止角频率,n 称为滤波器的阶。从(2) 式中可知,当ω=0时,(2)式有最大值1; 0.707A uo ω=ωC 时,(2)式等于0.707,即A u 衰减了3dB ;n 取得越大,随着ω的增加,滤波器的输出电压衰减越快,滤波器的幅频特性越接近于理想特性。如图1所示。ω 当 ω>>ωC 时, n c uo u A j A ??? ? ??≈ωωω1 )( (3) 图1低通滤波器的幅频特性曲线
两边取对数,得: lg 20c uo u n A j A ωω ωlg 20)(-≈ (4) 此时阻带衰减速率为: -20ndB/十倍频或-6ndB/倍频,该式称为衰减估算式。 表1列出了归一化的、n 为1 ~ 8阶的巴特沃斯低通滤波器传递函数的分母多项式。 在表1的归一化巴特沃斯低通滤波器传递函数的分母多项式中,S L = c s ω,ωC 是低通 滤波器的截止频率。 对于一阶低通滤波器,其传递函数: c c uo u s A s A ωω+= )( (5) 归一化的传递函数: 1 )(+= L uo L u s A s A (6) 对于二阶低通滤波器,其传递函数:2 22)(c c c uo u s Q s A s A ωωω++ = (7) 归一化后的传递函数: 1 1)(2 ++= L L uo L u s Q s A s A (8) 由表1可以看出,任何高阶滤波器都可由一阶和二阶滤波器级联而成。对于n 为偶数的高阶滤波器,可以由2n 节二阶滤波器级联而成;而n 为奇数的高阶滤波器可以由2 1-n 节二
通信仿真实训总结Systemview软件仿真实验 姓名:邱永锋 班级:信息123班 学号:1213260142 指导老师:崔春雷
一、 实训目的 利用System View ,构造ASK 、FSK 、PSK 、AM 、FM 的信号仿真,从System View 配置的图标库中调出有关图标并进行参数设置,完成图标间的连线,然后运行仿真操作,最终以时域波形、眼图、功率谱等形式给出系统的仿真分析结果。 二、幅移键控ASK (一)、ASK 产生二进制振幅键控信号的方法主要有两种: 方法1:采用相乘电路,用基带信号A(t)和载波tcos(wt)相乘就得到已调信号输出; 方法2:采用开关电路,这里的开关由输入基带信号A(t)控制,用这种方法可以得到同样的输出波形。 (二)、原理及框图 1. 调制部分:设信息源发出的是由二进制符号0、1组成的序列,则一个二进制的振幅键控信号可以表示成一个单极性矩形脉冲序列与一个正弦载波的相乘,。所以二进制幅度键控调制器可用一个相乘器来实现、 OOK 信号表达式: S ook (t)=a(n)?Acos(ω0t) A: 载波幅度 ω0:载波频率 a(n):二进制数字信号 原理框图: 基带信号 a(n) 相乘器 调制信号Sook(t) 载波 Acos (ω0t) 2、电路图
2.2ASK 解调原理 1.解调部分:解调有相干和非相干两种。非相干系统设备简单,但在信噪比较小时,相干系统的性能优于非相干系统。这里采用相干解调。 原理框图: Sook(t) 相乘器低通滤波器解调信号a(n) 载波Acos( t) 2.信号图: 三.FSK的调制与解调 (二)、原理及框图 FSK是用数字基带信号去调制载波的频率。因为数字信号的电平是离散的,所以,载波频率的变化也是离散的。在本实验中,二进制基带信号是用正负电平表示。对于2FSK,载波频率随着调制信号1或-1而变,1对应于载波频率F1,-1对应于载频F2。
滤波器是一种只传输指定频段信号,抑制其它频段信号的电路。 滤波器分为无源滤波器与有源滤波器两种: ①无源滤波器: 由电感L、电容C及电阻R等无源元件组成 ②有源滤波器: 一般由集成运放与RC网络构成,它具有体积小、性能稳定等优点,同时,由于集成运放的增益和输入阻抗都很高,输出阻抗很低,故有源滤波器还兼有放大与缓冲作用。 利用有源滤波器可以突出有用频率的信号,衰减无用频率的信号,抑制干扰和噪声,以达到提高信噪比或选频的目的,因而有源滤波器被广泛应用于通信、测量及控制技术中的小信号处理。 从功能来上有源滤波器分为: 低通滤波器(LPF)、高通滤波器(HPF)、 带通滤波器(BPF)、带阻滤波器(BEF)、 全通滤波器(APF)。 其中前四种滤波器间互有联系,LPF与HPF间互为对偶关系。当LPF的通带截止频率高于HPF的通带截止频率时,将LPF与HPF相串联,就构成了BPF,而LPF与HPF并联,就构成BEF。在实用电子电路中,还可能同时采用几种不同型式的滤波电路。滤波电路的主要性能指标有通带电压放大倍数AVP、通带截止频率fP及阻尼系数Q等。 带通滤波器(BPF) (a)电路图(b)幅频特性 图1 压控电压源二阶带通滤波器 工作原理:这种滤波器的作用是只允许在某一个通频带范围内的信号通过,而比通频带下限频率低和比上限频率高的信号均加以衰减或抑制。典型的带通滤波器可以从二阶低通滤波器中将其中一级改成高通而成。如图1(a)所示。 电路性能参数 通带增益 中心频率 通带宽度 选择性 此电路的优点是改变Rf和R4的比例就可改变频宽而不影响中心频率。 例.要求设计一个有源二阶带通滤波器,指标要求为: 通带中心频率 通带中心频率处的电压放大倍数: 带宽: 设计步骤: 1)选用图2电路。 2)该电路的传输函数: 品质因数: 通带的中心角频率: 通带中心角频率处的电压放大倍数: 取,则:
带通滤波器设计步骤 1、根据需求选择合适的低通滤波器原型 2、把带通滤波器带宽作为低通滤波器的截止频率,根据抑制点的频率距离带通滤波器中心频点距离的两倍作为需要抑制的频率,换算抑制频率与截止频率的比值,得出m 的值,然后根据m 值选择低通滤波器的原型参数值。 滤波器的时域特性 任何信号通过滤波器都会产生时延。Bessel filter 是特殊的滤波器在于对于通带内的所有频率而言,引入的时延都是恒定的。这就意味着相对于输入,输出信号的相位变化与工作的频率是成比例的。而其他类型的滤波器(如Butterworth, Chebyshev,inverse Chebyshev,and Causer )在输出信号中引入的相位变化与频率不成比例。相位随频率变化的速率称之为群延迟(group delay )。群延迟随滤波器级数的增加而增加。 模拟滤波器的归一化 归一化的滤波器是通带截止频率为w=1radian/s, 也就是1/2πHz 或约0.159Hz 。这主要是因为电抗元件在1弧度的时候,描述比较简单,XL=L, XC=1/C ,计算也可以大大简化。归一化的无源滤波器的特征阻抗为1欧姆。归一化的理由就是简化计算。 Bessel filter 特征:通带平坦,阻带具有微小的起伏。阻带的衰减相对缓慢,直到原理截止频率高次谐波点的地方。原理截止频率点的衰减具有的经验公式为n*6dB/octave ,其中,n 表示滤波器的阶数,octave 表示是频率的加倍。例如,3阶滤波器,将有18dB/octave 的衰减变化。正是由于在截止频率的缓慢变化,使得它有较好的时域响应。 Bessel 响应的本质截止频率是在与能够给出1s 延迟的点,这个点依赖于滤波器的阶数。 逆切比雪夫LPF 原型参数计算公式(Inverse Chebyshev filter parameters calculate equiations ) ) (cosh )(cosh 11Ω=--Cn n 其中 1101.0-=A Cn , A 为抑制频率点的衰减值,以dB 为单位;Ω为抑制频率与截止频率的比值 例:假设LPF 的3dB 截止频率为10Hz,在15Hz 的频点需要抑制20dB,则有: 95.91020*1.0==Cn ;Ω=15/10=1.5 1.39624.0988.2) 5.1(cosh )95.9(cosh 11===--n ,因此,滤波器的阶数至少应该为4
存档资料成绩: 华东交通大学理工学院 课程设计报告书 所属课程名称现代通信原理 题目基于Systemview的通信系统的仿真 分院电信分院 专业班级11级通信工程2班 学号20110210420226 学生姓名杨晨 指导教师杨小翠 2014年6月27日
华东交通大学理工学院 课程设计(论文)任务书 专业11通信工程班级2班姓名杨晨 一、课程设计(论文)题目基于Systemview的通信系统的仿真 二、课程设计(论文)工作:自2014 年6 月26 日起至2014 年6 月28 日止。 三、课程设计(论文)的内容要求: 1、对调制解调的通信系统进行仿真研究。 2、掌握振幅键控,频移键控,相移键控三种基本的数字调制方式。 3、掌握数字信号的传输方式。 4、通过Systemview仿真软件,实现对2ASK,2FSK等数字调制系统的仿真。 5、熟练掌握Systemview的用法。 学生签名:( 杨晨) 2014年6月27日
课程设计(论文)评阅意见 评阅人职称 20 年月日 序号项目 等级 优秀良好中等及格不及格 1 课程设计态度评价 2 出勤情况评价 3 任务难度评价 4 工作量饱满评价 5 任务难度评价 6 设计中创新性评价 7 论文书写规范化评价 8 综合应用能力评价 综合评定等级
目录 第一章课程设计目的 (5) 第2章SystemView的基本介绍 (6) 第3章二进制幅移键控(2ASK) (8) 3.1 调制系统 (8) 3.2解调系统 (10) 3.3 功率谱图: (12) 3.4 2ASK系统调制解调图对比 (13) 第四章二进制频移键控 (2FSK) (14) 4.1 调制系统 (14) 4.2 解调系统 (17) 4.3 功率谱图: (19) 4.4 2FSK系统调制解调图对比 (20) 第五章实验总结 (21) 第六章参考文献 (22)
RC 有源带通滤波器的设计 滤波器的功能是让一定频率范围内的信号通过,而将此频率范围之外的信号加以抑制或使其急剧衰 减。当干 扰信号与有用信号不在同一频率范围之内,可使用滤波器有效的抑制干扰。 用LC 网络组成的无源滤波器在低频范围内有体积重量大,价格昂贵和衰减大等缺点,而用集成运放 和RC 网络组成的有源滤波器则比较适用于低频,此外,它还具有一定的增益,且因输入与输出之间有良 好的隔离而便于级联。由于大多数反映生理信息的光电信号具有频率低、幅度小、易受干扰等特点,因而 RC 有源滤波器普遍应用于光电弱信号检测电路中。 一.技术指标 总增益为1 ; 通带频率范围为 300Hz —3000Hz ,通带内允许的最大波动为 -1db —+1db ; 阻带边缘频率范围为 225Hz 和4000Hz 、阻带内最小衰减为 20db ; 二?设计过程 1 .采用低通-高通级联实现带通滤波器; 将带通滤波器的技术指标分成低通滤波器和高通滤波器两个独立的技术指标,分别设计出低通滤波器 和高通 滤波器,再级联即得带通滤波器。 低通滤波器的技术指标为: f PH = 3000Hz A max - 1d B G =1 f SH = 4000Hz A min = 20dB 高通滤波器的技术指标为: f pL = 300Hz A max = 1d B G = 1 f si_ - 225Hz A min - 20dB 2. 选用切比雪夫逼近方式计算阶数 (1).低通滤波器阶数 N >ch 4[J(10 0.1Amin -1)/(10 0.1Ami N 1 _ ■ 1 Ch ( f SH / f PH ) (2).高通滤波器阶数 N 2 ch'[ *. (10 0.1Amin -1)/(100.1Amax -1)] Ch^(f pL /f SL ) 3. 求滤波器的传递函数 1) .根据Ni 查表求出归一化低通滤波器传递函数 H LP (S)二 H LP (S)| S S' 2= --- 2冗PH 2) .根据Na 查表求出归一化高通滤波器传递函数 N 2 H_P (S ',去归一化得 H^s ',去归一化得
一、虚拟化技术的概念 什么叫虚拟化技术?虚拟化是一种方法,本质上讲是指从逻辑角度而不是物理角度来对资源进行配置,是从单一的逻辑角度来看待不同的物理资源的方法。 这个定义首要说明的是,虚拟化是一种逻辑角度出发的资源配置技术,是物理实际的逻辑抽象。比如说,当前只有一台计算机,通过虚拟技术,在用户看来,似乎却是多台,每台都有其各自的CPU、内存、硬盘等物理资源。 对于用户,虚拟化技术实现了软件跟硬件分离,用户不需要考虑后台的具体硬件实现,而只需在虚拟层环境上运行自己的系
统和软件。而这些系统和软件在运行时,也似乎跟后台的物理平台无关。 二、虚拟技术原理与发展 虚拟技术原理 所有的IT设备,不管是PC、服务器还是存储,都有一个共同点:它们被设计用来完成一组特定的指令。这些指令组成一个指令集。对于虚拟技术而言,“虚拟”实际上就是指的虚拟这些指令集。 虚拟机有许多不同的类型,但是它们有一个共同的主题就是模拟一个指令集的概念。每个虚拟机都有一个用户可以访问的指令集。虚拟机把这些虚拟指令“映射”到计算机的实际指令集。硬分区、软分区、逻辑分区、Solaris Container、VMware、Xen、微软Virtual Server2005这些虚拟技术都是运用的这个原理,只是虚拟指令集所处的层次位置不同。 虚拟技术的发展情况 1965年,IBM7044机器,虚拟机开端; 1967年,Djiskstra实现第一个虚拟系统; 2001年,AIX 5L v5.1发布,IBM首次在小型机上实现了逻辑分区。 2002年,AIX 5L v5.2发布,IBM在小型机上实现了动态逻辑分区。
Systemview软件仿真实验 Systemview动态系统仿真软件是为方便大家轻松的利用计算机作为工具,以实现设计和仿真工作。它特别适合于无线电话(GSM,CDMA,FDMA,TDMA)和无绳电话,寻呼,机和调制解调器与卫星通信(GPS,DBS,LEOS)设计。能够仿真( c,4x c等) 3x DSP结构,进行各种时域和频域分析和谱分析。对射频/模拟电路(混合器,放大器,RLC电路和运放电路)进行理论分析和失真分析。它有大量可选择的库允许你可以有选择的增加通讯,逻辑,DSP和RF/模拟功能。它可以使用熟悉的windows 约定和工具与图符一起快速方便地分析复杂的动态系统。下面大家可以清楚地了解systemview系统如何方便地辅助您的工作。让我们首先来看一下它的各种窗口: —systemview系统窗 systemview系统设计窗口如下: 图表1系统窗 1 第一行《菜单栏》有几个下拉式菜单,通过这些菜单可以访
问重要的systemvie功能包括File, Edit, Preference, View, Notepads, Connections,Complier, System, Tokens, Help.用 中每个菜单都会下拉显示若干选项。假如我们需要打开一个文件,则只需要用鼠标点中open.....既可,系统会显示对话框提示输入文件名或选择文件名。 2 第二行《工具栏》是由图标按扭组成的动作条: 图标1 清屏幕图标2 消元件 图标3 断线图标4连线 图标5 复制图标6 注释 图标7中止图标8运行 图标9 时间窗图标10分析窗 图标11 打开子系统图标12 创建子系统 图标13 跟轨迹图标14波特图 图标15 画面重画图标16 图标翻转在systemview系统中各动作的操作顺序为: 1)用鼠表单击动作按扭 2)单击要执行动作的图符 3 左侧竖栏为《元件库》,将在后面作详细介绍。 二Systemview 系统分析 分析窗是观察用户数据的基本载体,在系统设计窗口中单击分析按扭(图标是示波器)既可访问分析窗口。在分析窗口有多种选项可以增强显示的灵活性和用途。分析窗显示如下:
全面了解什么是服务器虚拟化 与过去相比,在服务器虚拟化技术方面,现在最大的不同就是参与者的队伍大大扩充了--从处理器层面的AMD和Intel到操作系统层面的微软的加入,从数量众多的第三方软件厂商的涌现到服务器系统厂商的高调,我们看到一个趋于完整的服务器虚拟化技术生态系统在逐渐形成。 “虚拟化正在从一个小市场向主流市场转变,尤其是在Microsoft进入该市场之后”,当微软宣布了其Virtual Server 2005计划之后,业内有这样的评价。在介绍微软的这个虚拟化项目的时候,几乎所有的媒体都做了这样的描述―与其他服务器虚拟化技术一样,Virtual Server 2005允许用户对服务器进行分区,以使这些服务器能够支持多个操作系统和应用。 在大多数人看来,虚拟化就是分区。实际上,我们认为这是对虚拟化技术的一种误解,所以有必要对这两者的关系进行进一步阐述。 虚拟化等于分区吗? 实际上,虚拟化技术可以通过两个方向来帮助服务器更加合理地分配资源,一种方向就是把一个物理的服务器虚拟成若干个独立的逻辑服务器,这个方向的典型代表就是分区;另一个方向,就是把若干个分散的物理服务器虚拟为一个大的逻辑服务器,这个方向的典型代表就是网格。
关于服务器虚拟化的概念,各个厂商有自己不同的定义,然而其核心思想是一致的,即它是一种方法,能够通过区分资源的优先次序并随时随地能将服务器资源分配给最需要它们的工作负载来简化管理和提高效率,从而减少为单个工作负载峰值而储备的资源。 根据我们目前看到的资料,所谓的这种方法,看上去就是分区。所以,很多人就理所当然地认为虚拟化技术就是分区技术。 实际上,分区与虚拟化技术是互补的,当它们结合使用时能发挥出最高的效率,但是两者之间的确是有区别的。分区能够将物理系统资源划分成多个不同、单独的部分,各部分彼此独立操作。通常,在物理资源与逻辑分区之间存在一一对应关系,以便创建“盒中盒”对等关系。如果没有进行分区,则所有物理部件都精确地各司其职。 最底层的力量 早在2005,英特尔就宣布了其初步完成的Vand erp ool技术外部架构规范(EAS),并称该技术可帮助改进未来虚拟化解决方案。英特尔表示,将在2006年把Vanderpool应用于安腾架构平台,同时还计划在台式机处理器和芯片组产品中采用该技术。 相比之下,AMD在虚拟化技术方面下手更早。Pacifi ca技术规范是AMD计划用于其64位产品中的虚拟化技术,该技术将用于基于x86架构的服务器、台式机和笔记本电脑等系列产品,“我们将进一步加快虚拟技术的开发步伐,增强虚拟化技术实力”,在去年底宣布Pacifica技术规范的时候,AMD副总裁兼计算
2DPSK传输系统仿真及其性能估计 ———模拟调制及非相干解调 学院: 班级: 学号: 姓名: 验收日期:
目录 一.系统仿真目的--------------------------p1 二.系统仿真任务--------------------------p1 三.原理简介------------------------------p1 四.系统组成框图及图符参数设置------------p3 五.各点波形------------------------------p8 六.主要信号的功率谱密度------------------p18
七.滤波器的单位冲击响应及幅频特性曲线----p22 八.系统抗噪声性能分析--------------------p24 九.实验心得体会--------------------------p26
?一.系统仿真目的 1. 了解数字频带传输系统的组成、工作原理及其抗噪声性能; 2. 掌握通信系统的设计方法与参数选择原则; 3. 掌握使用SystemView软件仿真通信系统的方法。 ?二.系统仿真任务 1. 设计2DPSK数字频带传输系统,并使用SystemView软件进行仿真; 2. 获取主要信号的时域波形及相关的功率谱,以及滤波器的单位冲击相 应和幅频特性曲线; 3.对所设计的2DPSK系统进行抗噪声性能分析,并作出误码率曲线。 ?三.原理简介 在2PSK信号中,信号相位的变化是以未调正弦波的相位作为参考,用载波相位的绝对数值来表示数字信息的,所以称为绝对移相。由于相干载波恢复中载波相位的180度相位模糊,导致解调出的二进制基带信号出现反向现象,从而难以实际应用。为了解决2PSK信号解调过程的反向工作问题,提出了二进制差分相位键控(2DPSK)。 2DPSK方式即是利用前后相邻码元的相对相位值去表示数字信息的一种方式。现假设用Φ表示本码元初相与前一码元初相之差,并规定:Φ=0表示0码,Φ=π表示1码。则数字信息序列与2DPSK信号的码元相位关系可举例表示如2PSK信号是用载波的不同相位直接去表示相应的数字信号而得出的,在接收端只能采用相干解调,它的时域波形图如图a.所示。 图a. 2DPSK信号
范道中学七年级数学导学提纲课题:幂的乘方 出卷人:施培新审核人:陈益锋 2012-2-22 姓名 _____ 课前参与 (一)预习内容:课本P43—44 (二)知识整理: 1.探索: (1)(2)是幂2的_____次方,其意义是_____个2的连乘积, 可写成:(2)=2×2=2= 2=2。 (2)(a)是幂a的_____次方,其意义是____个a的连乘积, 可写成:(a)=()×()×()= a= a= a; 由此得:(a)是幂a的______次方,其意义是______个a的连乘积, 可写成:(a)=()=a=a。 2.归纳:幂的乘方的法则:__________________________________________; 即写成公式: (a)=a(m、n为正整数)。 3.尝试练习: (1)(10)= (5)(-5)= (2)(10)= (6)(-5)= (3)(b)= (7 [(n-m)] 5 (4)(b)= (8 a·(a)2+ a·(a)3
4.推广:[(a m )n ]p =____________ (m 、n 、p 为正整数。 5.幂的乘方法则的逆用为___________________________。 (三)思考: 通过预习,你认为本节内容主要研究了什么?你还有什么问题需和大家一起探讨?你有没有新的发现和大家一起分享! 课中参与 例题1、计算:(1)(55)3 (2)(53)5 (3)(3x 5 (4)(35 x 例题2、计算:(1)[(a -b )] (2)[(x -y )] 例题3、计算:(1)-(y 4)3 (2)[(-y )4]3 (3)(-y 4)3 例题4、计算:(1)(a )·a (2)(b )·(b ) (3)a ·(a )-a ·(a )2 拓展:1、(1)[(2)] (2)[(-3)] 2、已知3=2,3y =3,求(1)33x ,3 2y 的值。 (2)求3的值. 3、已知:3=a ,3=b ,用含a 、b 的代数式表示3 。 课后参与 课题:幂的乘方 姓名_____ 一、填空: (1)(7)5=_________; (2)[(-22]3=_________; (3) (a ) =________; (4)(-a 5)3=_________; (5)[(a -2)]=________; (6)[(x -y )]=______;
真抓实干勇于创新 努力开创农机安全监理工作新局面 通辽市农机监理所陈国贵所长在全区农机安全生产工作会议上的发言 2009年,通辽市农机安全监理所认真贯彻落实农机法律法规,坚持“安全第一,预防为主”的方针,加强对农机安全生产工作的领导,使我市的农机安全监理工作进入了职能法定化、人员专业化、工作程序化、装备现代化的新时代,农机监理各项工作均取得了明显成效。一年来全市共检验拖拉机54790台,年检率为82%,超额完成任务;农业机械注册数完成11668台,完成任务的108。3%;新考试驾驶人9213人,完成任务的108.4%;没有发生重特大农机事故。为通辽市实现农业机械化又好又快发展,为推进现代农业和社会主义新农村建设,构建社会主义和谐社会作出了应有的贡献。 一、勇于创新,不断进取,努力促进农机安全监理工作健康发展. 我们按照发展要有新思路,新年要有新局面,业务要有新突破,各项工作要有新举措的总体思路,突出“一个主题”即:“创新体制机制、服务科学发展"。提高“两个能力”即:创造性开展农机监理工作的能力、解决复杂矛盾和突出问题的能力。树立“三种意识"
即:为农机安全生产服务的大局意识、解放思想改进工作思路的创新意识、分析问题解决问题的责任意识。遵循“办法总比困难多”的思想理念,找准工作的切入点、着重点,采取有力措施,紧紧围绕提高农机安全监理目标管理“三率”,即上户率、考证率、年检率这个中心工作目标,转变工作思路、创新工作方法,探索农机安全监理工作的新形式,做到只要有利于农机安全监理工作的,只要对促进农机安全监理工 作开展的,只要能保证农机安全生产,我们就大胆去尝试,大胆去开展,去开拓,不等不靠,从而强化创新工作方法。 通辽市下辖五旗一县一市一区,八个农机监理站,通过调查研究,我们从实际出发对八个旗县站工作提出分门别类的指导性意见,为达到实现农机监理事业的实质性进展最终目标,各旗县市区纷纷行动,按照市局提出新的工作思路、新的探索,不断取得良好的成绩。主要体现在以下两个方面: 一是进一步强化农机监理分站建设,加强规范化管理.我市地域广阔,面积6万平方公里,210万农牧民,耕地面积1520万亩,农机保有量达161791台,农牧民居住分散,各旗县市区监理站人员编制少,全市仅有在编监理人员93人,而且管理经费不足、车辆状况差.条件和环境的制约使原有的农机监理工作只能由点到点,无法覆盖到面,留下监管死角和空白较多。上述情况,使我们认识到:要开展好农机监理工作,
课程设计目的: 1、熟练掌握Systemview的用法,在该软件的配合下完成各个系统的结构图,还有调试结果图 2、深入了解2ASK,2FSK,2PSK,2DPSK的调制解调原理 课程设计器材: PC机,Systemview软件 课程设计原理: 数字信号的传输方式可以分为基带传输和带通传输。为了使信号在带通信道中传输,必须用数字基带信号对载波进行调制,以使信号与信道特性相匹配。在这个过程中就要用到数字调制。 在通信系统中,利用数字信号的离散取值特点通过开关键控载波,来实现数字调制,这种方法通常称为键控法,主要对载波的振幅,频率,和相位进行键控。键控主要分为:振幅键控,频移键控,相移键控三种基本的数字调制方式。 Systemview的基本介绍: SystemView是一个用于现代科学与科学系统设计及仿真打动态系统分析平台。从滤波器设计、信号处理、完整通信系统打设计与仿真,到一般打系统数字模型建立等各个领域,SystemView在友好而功能齐全打窗口环境下,为用户提供啦一个精密的嵌入式分析工具。 进入SystemView后,屏幕上首先出现该工具的系统视窗,系统视窗最上边一行为主菜单栏,包括:文件(File)、编辑(Edit)、参数优选(Preferences)、视窗观察(View)、便笺(NotePads)、连接(Connetions)、编译器(Compiler)、系统(System)、图符块(Tokens)、工具(Tools)和帮助(Help)共11项功能菜单。如下图所示。
系统视窗左侧竖排为图符库选择区。图符块(Token)是构造系统的基本单元模块,相当于系统组成框图中的一个子框图,用户在屏幕上所能看到的仅仅是代表某一数学模型的图形标志(图符块),图符块的传递特性由该图符块所具有的仿真数学模型决定。创建一个仿真系统的基本操作是,按照需要调出相应的图符块,将图符块之间用带有传输方向的连线连接起来。这样一来,用户进行的系统输入完全是图形操作,不涉及语言编程问题,使用十分方便。进入系统后,在图符库选择区排列着8个图符选择按钮创建系统的首要工作就是按照系统设计方案从图符库中调用图符块,作为仿真系统的基本单元模块。可用鼠标左键双击图符库选择区内的选择按钮。 当需要对系统中各测试点或某一图符块输出进行观察时,通常应放置一个信宿(Sink)图符块,一般将其设置为“Analysis”属性。Analysis块相当于示波器或频谱仪等仪器的作用,它是最常使用的分析型图符块之一。 在SystemView系统窗中完成系统创建输入操作(包括调出图符块、设置参数、连线等)后,首先应对输入系统的仿真运行参数进行设置,因为计算机只能采用数值计算方式,起始点和终止点究竟为何值?究竟需要计算多少个离散样值?这些信息必须告知计算机。假如被分析的信号是时间的函数,则从起始时间到终止时间的样值数目就与系统的采样率或者采样时间间隔有关。实际上,各类系统或电路仿真工具几乎都有这一关键的操作步骤,SystemView 也不例外。如果这类参数设置不合理,仿真运行后的结果往往不能令人满意,甚至根本得不到预期的结果。有时,在创建仿真系统前就需要设置系统定时参数。 时域波形是最为常用的系统仿真分析结果表达形式。进入分析窗后,单击“工具栏”内的绘制新图按钮(按钮1),可直接顺序显示出放置信宿图符块的时域波形,对于码间干扰和噪声同时存在的数字传输系统,给出系统传输性能的定量分析是非常繁杂的事请,而利用“观察眼图”这种实验手段可以非常方便地估计系统传输性能。实际观察眼图的具体实验方法是:用示波器接在系统接收滤波器输出端,调整示波器水平扫描周期T s,使扫描周期与码元周期T c同步(即T s=nT c,n为正整数),此时示波器显示的波形就是眼图。由于传输码序列的随机性和示波器荧光屏的余辉作用,使若干个码元波形相互重叠,波形酷似一个个“眼睛”,故称为“眼图”。“眼睛”挣得越大,表明判决的误码率越低,反之,误码率上升。SystemView具有“眼图”这种重要的分析功能。 当需要观察信号功率谱时,可在分析窗下单击信宿计算器图标按钮,出现“SystemView 信宿计算器”对话框,单击分类设置开关按钮spectrum,完成功率谱的观察。 课程设计过程 1 二进制振幅键控 2ASK 2ASK的实现: 模拟调制法键控法 在幅移键控中,载波幅度是随着调制信号而变化的。一种是最简单的形式是载波在二进制调制信号1或0控制下通或断,这种二进制幅度键控方式称为通断键控(OOK)。二进制振幅键控方式是数字调制中出现最早的,也是最简单的。这种方法最初用于电报系统,但由于它在抗噪声的能力上较差,故在数字通信中用的不多。但二进制振幅键控常作为研究其他数字调制方式的基础。
电子系统设计实验报告 姓名 指导教师 专业班级 学院 提交日期2011年11月1日
目录 第一章设计题目 (1) 1.1 设计任务 (1) 1.2 设计要求 (1) 第二章原理分析及参数计算 (1) 2.1 总方案设计 (1) 2.1.1 方案框图 (1) 2.1.2 原理图设计 (1) 2.2 单元电路的设计及参数计算 (2) 2.2.1 二阶低通滤波器 (2) 2.2.2 二阶高通滤波器 (3) 2.3 元器件选择 (4) 第三章电路的组装与调试 (5) 3.1 MultiSim电路图 (5) 3.2 MultiSim仿真分析 (5) 3.1.1 四阶低通滤波器 (5) 3.1.2 四阶高通滤波器 (5) 3.1.3 总电路图 (6) 3.3 实际测试结果 (6) 第四章设计总结 (6) 附录………………………………………………………………………………… 附录Ⅰ元件清单………………………………………………………………… 附录Ⅱ Protel原理图…………………………………………………………… 附录Ⅲ PCB图(正面)………………………………………………………… 附录Ⅳ PCB图(反面)………………………………………………………… 参考文献…………………………………………………………………………
第一章 设计题目 1.1 设计任务 采用无限增益多重反馈滤波器,设计一四阶带通滤波器,通带增益01A =, 1L f kHz =,2H f kHz =,设计方案如图1.1所示。 图1.1 四阶带通滤波器方案图 1.2 设计要求 1.用Protel99 画出原理图,计算各元件参数,各元件参数选用标称值; 2.用Mutisum 对电路进行仿真,给出幅频特性的仿真结果; 3.在面包板上搭接实际电路,并测试滤波器的幅频特性; 4.撰写设计报告。 第二章 设计方案 2.1 方案设计 2.1.1方案框图(如图2.1.1) 图2.1.1 四阶带通滤波器总框图 2.1.2原理图设计 本原理图根据结构框图组成了4个二阶滤波器,上面两个分别为c f =2kHz ,Q=0.541,A=1的低通滤波器和c f =2kHz ,Q=1.306,A=1的低通滤波器;下面两个分别为c f =1kHz ,Q=0.541,A=1的高通滤波器和c f =1kHz ,Q=1.306,A=1的高通滤波器,其中P1、P2、P3作为接线座用来接线,原理图如图2.1.2,具体参数计算见2.2节。 V i V o 二阶低通滤波器 二阶低通滤波器 二阶高通滤波器 二阶高通滤波器