学号1151401121
《电气与PLC控制技术及应用》
课程设计
(2011级本科)
题目:基于S7-200PLC的装卸料小车控制系统设计
专业:电气工程及其自动化
作者姓名:马小军
指导教师:张静
完成日期:2014 年7 月 4 日
在生产现场中,尤其是在一些自动化生产线上,经常会遇到一台送料车在生产线上根据要求,多地点随机卸料;或是装料车多地点搜集成品。
如果所按选择小车停车位置的按钮号与小车所压下的行程开关号相等时,按下起动按钮,小车停车。不想等则行驶致呼叫站呼叫号相等的行程开关处。
目录
1.设计的目的和意义 (1)
2.总体设计内容 (1)
2.1课程设计要求分析 (1)
2.2课程设计内容 (2)
3.硬件设计 (4)
3.1电器元件的选择 (4)
3.2电器原理图 (4)
3.3主电路图 (5)
4.软件设计 (7)
4.1 I/O地址分配表 (7)
4.2 I/O接线图 (8)
5.软件设计 (9)
6.程序调试 (15)
7.设计总结 (19)
附录:图(表)录 (20)
参考文献 (21)
1.设计的目的和意义
现代生产和科学技术的发展,台车呼叫控制系统已经被广泛应用于各种场合,属于物流自动化的一种,使其作业过程的设备和设施自动化,包括运输、装卸、包装、分拣、识别等作业过程,是工业生产的自动运输加工系统,例如台车炉,台车炉是属于周期式作业炉,炉膛不分区域。台车炉的结构:炉底为一可移动的台车。加热前,台车在炉外装料,加热件放在专用的垫铁上,然后由牵引机构将台车拉入炉内进行加热,加热之后再由牵引机构将台车拉出炉外卸料,之后或用吊车将加热的工件吊到锻压设备上进行加工。从台车呼叫控制系统的发展趋势来看,台车呼叫控制系统已往节能,高效率发展,被应用于各种场合,有着广泛的发展前景,真正达到降低物流成本、提高物流效率,被生产企业所接受。
2.总体设计内容
2.1课程设计要求分析
图1 PLC的设计流程
(1)确定方案:
被空对象环境较差,系统工艺复杂,考虑用PLC控制系统。控制很简单,可以考虑用继电器控制系统。用PLC控制,首先要了解系统的工作过程及所有功能要求,从而分析被控对象的控制过程,输入/输出量是开关量还是模拟量,明确控制要求,绘制系统流程图。
(2)选择PLC的机型:
PLC的可靠性上是没有问题的,机型的选择主要是考虑功能上满足系统要求。机型的选择依据:控制对象的输入量,输出量工作电压输出功率现场对系统的响应速度要求控制室与现场的距离等。
(3)选择I/O设备,列出I/O地址分配表:
输入设备:控制按钮、行程开关、接近开关等。
输出设备:接触器、电磁阀、信号灯等。确定输入/输出设备的型号和数量。
分配I/O地址时注意以下几点:把所有按钮、行程开关等集中配置,按顺序分配I/O地址;每个I/O设备占用地址;同类型的I/O点应尽量安排在同一个区。
(4)设计电气线路图:
(5)程序设计与调试
程序设计可以用经验设计或者功能表图设计法,或两者结合使用。
(6)总装调试:
接好硬件线路,把程序输入PLC中,联机调试
2.2课程设计内容
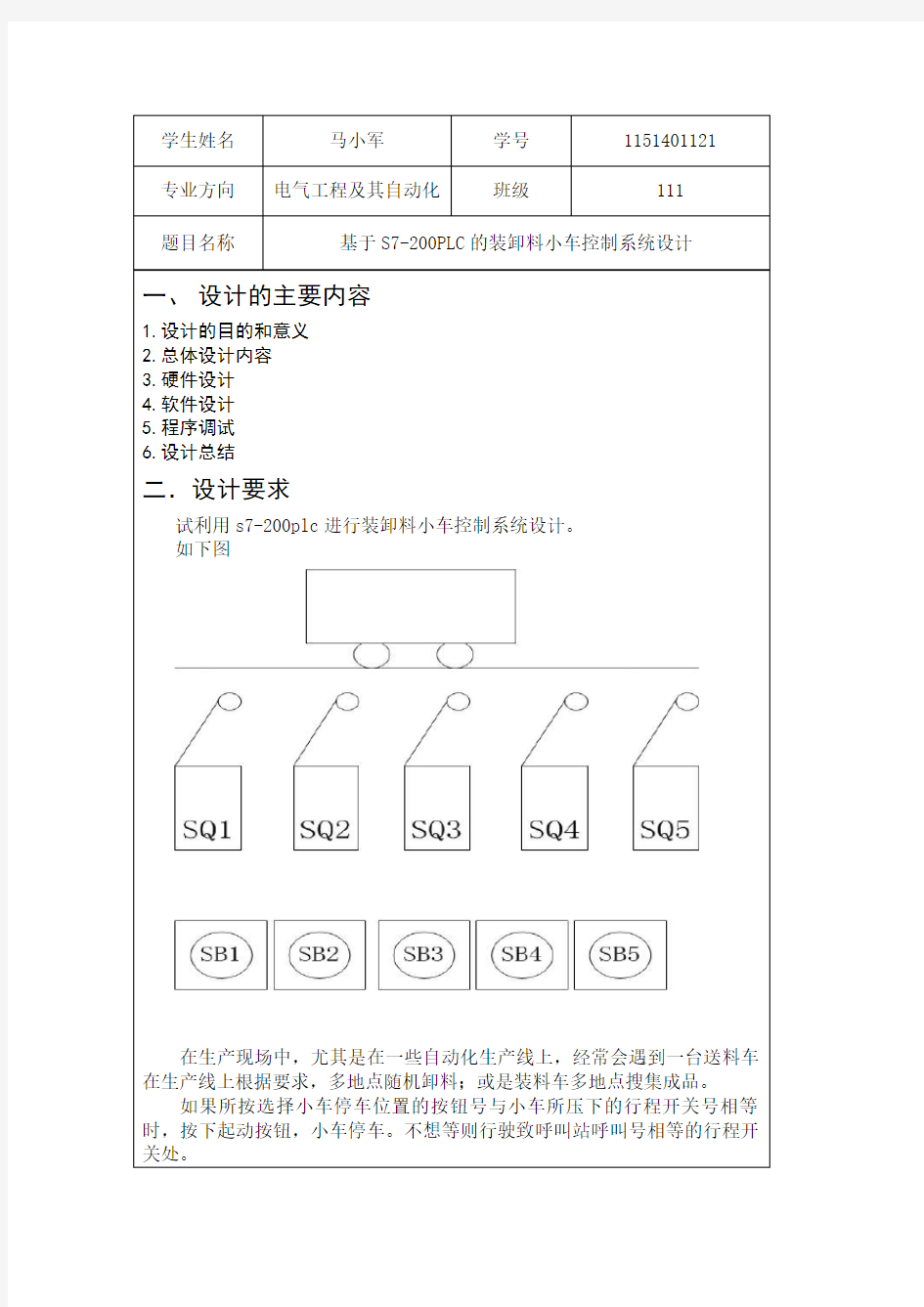
试利用s7-200plc进行装卸料小车控制系统设计。
在生产现场中,尤其是在一些自动化生产线上,经常会遇到一台送料车在生产线上根据要求,多地点随机卸料;或是装料车多地点搜集成品。
起动
SB6
/手动
SB8
SQ1SQ2SQ3SQ4SQ5
SB1SB2SB3SB4SB5
图2 小车控制系统图
一.自动过程
1. 如果小车停车位置的按钮号(SB1~SB5)与小车到达的行程开关号相等时,按下起动按钮(SB6),小车停车进行装卸料。
2. 如果小车停车位置的按钮号(SB1~SB5)大于小车到达的行程开关号时,按下起动按钮(SB6),小车右行,直到两者相等时停车进行装卸料。
3. 如果小车停车位置的按钮号(SB1~SB5)小于小车到达的行程开关号时,
按下起动按钮(SB6),小车左行,直到两者相等时停车进行装卸料。
二.手动过程
1.如果小车未在行程开关位置时,则按下手动控制按钮(SB8)进行手动控
制。
2.如果小车位置在右侧,则按下手动左行按钮(SB9),使其到指定位置。
3.如果小车位置在左侧,则按下手动左行按钮(SB10),使其到指定位置。
3.硬件设计
3.1电器元件的选择
表1 元器件分配表
3.2电器原理图
在生产现场中,尤其是在一些自动化生产线上,经常会遇到一台送料车在生产线上根据要求,多地点随机卸料;或是装料车多地点搜集成品。
在图中的卸料小车,可根据要求在五个位置卸料,因此,它有三个状态:左行(电动机正转)、右行(电动机反转)、及停车。SQ1~SQ5为五个停车位置的行程开关,小车压上时为ON,SB1~SB5为选择小车停车位置的按钮。
图3 原理流程图
3.3主电路图
三相交流电源引入线采用L1、L2、L3标号,电源开关之后的三相交流电源主电路分别标U、V、W.下图为本设计的主电路原理图,如图2所示。该电路图有KM1和KM2两个接触器,通过分别PLC接通KM1和KM2来控制小车的正反转。假设接通KM1为正转,接通KM2为反转。
图4 主电路图
4. 软件设计
4.1 I/O地址分配表
表2 I/O地址分配表
4.2 I/O接线图
图5 I/O接线图
5.软件设计
6.程序调试
STEP7-Micro/WIN32是SIEMENS公司专为SIMATIC系列S7-200研制开发的编程软件,它是基于Windows平台的应用软件。STEP7-Micro/WIN32可以使用个人计算机作为图形编辑器,用于联机或脱机开发用户程序,并可在线实时监控用户程序的执行状态。
打开s7-200仿真软件。装载导出的程序并运行程序。
仿真并观察仿真结果。
第一步:启动。按下I0.0。
第二步:假设小车处在行程开关4位置处,则I1.5按下。且行程开关4处指示灯
点亮,即Q1.4亮
第三步:小车左行,手动行车致行程开关2处。
1.按下手动开关I0.2。
2.按下手动左行I0.3,则小车KM1启动,即Q0.0亮。
3.开始左移,到达行程开关2处。
4.结束手动操作。
《电气与PLC控制系统设计》指导及任务书设计课题:装卸料小车PLC控制设计 电气工程学院
目录 1设计说明书 0 1.1设计目的 0 1.2设计任务 0 1.3设计内容与要求 (1) 1.4主要参数计算及元器件选择 (4) 1.5 I/O分配及元器件表 (10) 1.6运料小车控制系统梯形图 (12) 2设计小结 (12) 3参考文献 (13)
设计说明书 1.1设计目的 本课程设计是装卸料小车PLC空制设计,传统的运料小车大都是继电器控制。而继电器控制有着接线繁多,故障率高且维护维修不易等缺点。装卸料采用PLC 控制,体积小,重量轻,控制方式灵活,可靠性高,操作简单,维修容易。使用该设计不仅准确安全可靠,而且提高了劳动生产率,降低工人劳动强度,具有较好的经济效益和社会效益。可编程控制器PLC以其丰富的I/O接口模块,高可靠性,可以在装卸料控制系统的设计中起到十分重要的作用。 PLC不仅可以实现逻辑控制,顺序控制,定时,计时,算数运算,数据处理数据通信等功能,并且具有处理分支,中断,自诊断的能力。逻辑控制功能通过软件编程实现,柔性强,控制功能多,控制线路大大简化。PLC可以使用通用的 个人计算机作为图形编辑器,用于在线或离线开发用户程序使用在线对PLC进行各种操作,并且可以在线实时监控用户的执行状态。它提供三种编程语言,即梯 形图LAD语句表STL及功能块FBD每种语言都有自己的特点。梯形图LAD是在继电器接触器控制基础上演变而来的,是一种的图形化的编程语言,编程人员几乎不必具备计算机的基础知识,不必考虑PLC内部的机构原理,只要有继电器接触器的基础,就能在很短的时间内掌握梯形图LAD勺使用和编程方法。 作为目前国内控制市场上的主流控制器,PLC在市场、技术、行业影响等方 面有着重要的作用,随着PLC勺不断发展和革新,使得生产线的运输控制也将得到不断的改善和生产率的不断提高,利用PLC空制来代替继电器控制已是大势所趋。 1.2设计任务 1.绘制电气控制原理图,PLC输入输出接线图,控制面板元件布置图,元器件之间接线图等图纸。 2.控制梯形图和程序的设计。 3.先设计出继电接触控制系统,后设计PLC控制系统,以及I/O 口分配图和PLC 的选型。 4.图形符号采用新国标进行设计 5.编写设计说明书、使用说明书和设计小结。
中北大学 课程设计说明书 学生姓名:学号: 学院(系):机械工程系 专业:车辆工程 题目:一汽大众宝来乘用车总体设计及各总成选型综合成绩: 指导教师:职称: 教授 2013年 12 月 30 日
中北大学 课程设计任务书 2013/2014 学年第 1 学期 学院(系):机械工程 专业:车辆工程 学生姓名:学号: 课程设计题目:一汽大众宝来乘用车整体设计及各总成选型起迄日期:12 月20 日~ 1 月 3 日 课程设计地点: 指导教师 系主任: 下达任务书日期: 2013 年12月20日
课程设计任务书 1.课程设计教学目的: (1)培养学生专业思想。使学生了解以前所学理论知识和参加过得金工实习、工艺实习及专业生产实习等环节,都是为今后的专业设计、生产做准备,每一个环节都是为了培养一名合格的车辆工程专业人才而设置,车辆工程专业需要有扎实的专业基础知识和实践能力。 (2)提高结构设计能力。通过课程设计,使学生学习和掌握汽车驱动桥的主减速器设计的程序和方法,树立正确的工程设计思想,培养独立的、全面的、科学的工程设计的能力。 (3)在课程设计实践中学会查找、翻阅和使用标准、规范、手册、图册和相关技术资料等。 2.课程设计的内容和要求: 1、内容:一汽大众宝来乘用车整体设计及各总成选型 2、具体参数: 车型7 长宽高 /mm 前悬/后悬 /mm 前轮距/后轮 距 / mm 轴距 /mm 总质 量/kg 整备质 量/kg 一汽大众宝来4376 1735 1446 873/990 1513/1494 2513 1830 1280 额定 承 载人数发动机 型号 排量 /mL 发动机功率 /kW 轴数 最高车速 /(km/h) 轮胎规格 5 BJH 1595 74 2 182 195/65R15 3、要求: 为给定基本设计参数的汽车进行总体设计,计算并匹配合适功率的发动机,轴荷分配和轴数,选择并匹配各总成部件的结构型式,计算确定各总成部件的主要参数,详细计算指定总成的设计参数,绘出指定总布置草图和乘员舱布置草图。(1)驱动形式及主要参数的选择:驱动形式,布置形式,汽车主要参数的选择(2)发动机的选择 (3)外形设计及总体布置:整车布置的基准线(面)—零线的确定,各部件的布置3.课程设计成果形式及要求: 完成内容: (1)总布置草图1张(1号图) (2)驾驶舱布置草图1张(3号图) (3)零件图1张(3号图) (4)设计计算说明书1份
1概述1.1 PLC的基本概念 在PLC的发展过程中,美国电器制造商协会(NEMA)经过四年的调查,于1980年把这种新型的控制器正式命名为可编程控制器(Programmable Controller),英文缩写为PC,并且作如下定义:“可编程控制器是一种数字运算操作的是的电子系统,专为在工业环境下应用而设计。它使用可编程序的存储器来存储指令,用来在其内部存储执行逻辑运算,顺序控制,计数,计时和算术运算等操作的指令。并且通过数字式和模拟式的输入和输出,控制各种类型的机械或生产过程。PLC及其有关外部设备,都应按易于与工业系统联成一个整体,易于扩充其功能的原则设计。” 定义强调了PLC应直接应用于工业环境,它必须有很强的抗干扰能力,广泛的适应能力和应用范围。这是区别于一般微机控制系统的一个重要特征。 1.2 PLC的发展 PLC自问世以来,经过40多年的发展,在美,德,日等工业发达的国家已成为重要的产业之一。世界总销售额不断上升,生产厂家不断涌现,品种不断翻新,产量产值大幅度上升而价格不断下降。 目前,世界上有200多个厂家,较有名的公司有美国:AB通用电气,莫迪康公司;日本:三菱,富士,欧姆龙,松下电工等:德国:西门子公司;法国:TE施耐德公司;韩国:三星,LG公司等。 1.3 PLC的发展趋势 (一)大型化 为适应大规模控制系统的要求,大型PLC向着大存储容量,高速度,高性能,增加I|O点数的发展方向。主要表现在以下几个方面: 1.增强网络通信功能:; 2.发展智能模块; 3.外部故障诊断功能; 4.编程语言、编程工具标准化、高级化 5.实现软件、硬件标准化 6.编程组态软件发展迅速
编号:CZ-GC-07906 ( 操作规程) 单位:_____________________ 审批:_____________________ 日期:_____________________ WORD文档/ A4打印/ 可编辑 搅拌车装卸料安全操作规程Safe operation procedures for loading and unloading of mixer truck
搅拌车装卸料安全操作规程 操作备注:安全操作规程是要求员工在日常工作中必须遵照执行的一种保证安全的规定程序。忽视操作规程在生产工作中的重要作用,就有可能导致出现各类安全事故,给公司和员工带来经济损失和人身伤害,严重的会危及生命安全,造成终身无法弥补遗憾。 70/186 28.搅拌车装搅拌车装搅拌车装卸料安全操作规程卸料安全操作规程卸料安全操作规程卸料安全操作规程 1目的 规范员工行为,实现作业标准化,确保人身和设备安全 2范围 适用于混凝土搅拌车装、卸料操作过程 3风险辨识 车辆伤害、机械高空坠落物体打击 4防护用品 工作服、安全帽鞋反光衣 5操作流程 5.1作业前
5.1.1出车前要检查行证件是否齐全(驾驶、通等)。出车前要检查行证件是否齐全(驾驶、通等)。 5.1.2出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等),正常后方可上路行驶。 5.1.3启动车辆,在指定区域内将罐积水排放干净把体调至装料状态启动车辆,在指定区域内将罐积水排放干净把体调至装料状态启动车辆,在指定区域内将罐积水排放干净把体调至装料状态启动车辆,在指定区域内将罐积水排放干净把体调至装料状态启动车辆,在指定区域内将罐积水排放干净把体调至装料状态启动车辆,在指定区域内将罐积水排放干净把体调至装料状态启动车辆,在指定区
自动往返小车制
————————————————————————————————作者:————————————————————————————————日期:
自动往返小车的制作 本设计采用单片机作为自动往返小车的检测和控制核心。路面黑线检测用发射式红外传感器,行使距离用霍耳元件进行检测行使距离,利用高低电平来控制继电器,达到电动机的转速控制。 二、关键字:电刹车自动往返光电检测霍尔元件动态显示 三、方案论证 根据题目要求,本设计的主要任务是完成电动小气车在规定的行使路线中速度的控制,根据不同的行使路段要求不同的行使速度,并对行程中的有关数据进行记录和处理。 1、数据采集方案的选择 (1)、使用红外发光二极管和接收管组合。 (2)、使用发光二极管的光敏三极管组合。 本设计是近距离探测,故采用(1)来完成数据的采集。考虑环境光干扰主要是直流分量,如果采用带有交流分量的调制信号,则可大幅度的减少 外界干扰;另外,红外发射管的最大工作电流取决于平均电流,如果使用占 空比小的调制信号,在平均电流不变的情况下,瞬时电流可以很大,这样可 以大大提高信噪比。 2、电源选择 (1)所有器件采用单一的电源控制,这样控制比较简单,但电动机启动时瞬间电流很大,会造成整体电路的电压不稳定,严重时可能会使单片机掉电。 (2)双电源供电。将电机驱动电源和单片机供电电源分开,这样虽然不如(1)方便灵活,但可以避免电机驱动造成的干扰,大大提高了系统的稳定性。故 设计中选择此方案。 3、电机驱动调速方案的选择 (1)采用继电器对电机的驱动电压进行调整,在高速时进行全速运转,低速时用精密电阻控制小车的速度,并进行调速来达到要求。这样电路比较简单,且 容易实现。 (2)采用555振荡器调脉宽的方式控制电动机的转速,后级采用三极管D882推
毕业设计 说明书 题目名称:小车车架设计 院系名称:机械工程系焊接及自动化班级:焊接11.1班 学生姓名: 指导教师:韩天判 2013年6月7日
摘要 本设计课题是关于小型车的车架设计。所设计的车架结构形式是前后等宽的边梁式车架,其中纵梁和横梁的截面形状都采用槽型,纵梁与横梁通过焊接连接。说明书详细阐明了小型汽车的方案论证:车架的设计要求、车架结构的确定、车架宽度的确定、车架纵梁形式的确定、车架横梁形式的确定、车架纵梁与横梁连接形式的确定、车架的受载分析。 关键词:小车、车架、设计
1 绪论 1.1概述 汽车车架是整个汽车的基体,是将汽车的主要总成和部件连接成汽车整体的金属构架,对于这种金属构架式车架,生产厂家在生产设计时应考虑结构合理,生产工艺规范,要采取一切切实可行的措施消除工艺缺陷,保证它在各种复杂的受力情况下不至于被破坏。 车架作为汽车的承载基体,为货车、中型及以下的客车、中高级和高级轿车所采用,支撑着发动机离合器、变速器、转向器、非承载式车身和货箱等所有簧上质量的有关机件,承受着传给它的各种力和力矩。为此,车架应有足够的弯曲刚度,以使装在其上的有关机构之间的相对位置在汽车行驶过程中保持不变并使车身的变形最小;车架也应有足够的强度,以保证其有足够的可靠性与寿命,纵梁等主要零件在使用期内不应有严重变形和开裂。车架刚度不足会引起振动和噪声,也使汽车的乘坐舒适性、操纵稳定性及某些机件的可靠性下降。 本说明书只是叙述非承载式车身结构形式中单独的车架系统。承载式汽车,前、后悬架装置,发动机及变速器等传动系部件施加的作用力均由车架承受,所以,车架总成的刚性、强度及振动特性等几乎完全决定了车辆整体的强度、刚度和振动特性。设计时在确保车架总成性能的同时,还应对车架性能和匹配性进行认真的研究。车架结构很多都是用电弧焊焊接而成,容易产生焊接变形。在设计方面对精度有要求的部位不得出现集中焊接,或者从部件结构方面下工夫,尽量确保各个总成的精度。另外,与其他焊接方法相对比,采用电弧焊的话,后端部容易出现比较大的缺口,出现应力集中现象。所以,应对接头位置和焊接端部进行处理。 车架受力状态极为复杂。汽车静止时,它在悬架系统的支撑下,承受着汽车各部件及载荷的重力,引起纵梁的弯曲和偏心扭转(局部扭转)。如汽车所处的路面不平,车架还将呈现整体扭转。汽车行驶时,载荷和汽车各部件的自身质量及其工作载荷(如驱动力、制动力和转向力等)将使车架各部件承受着不同方向、不同程度和随机变化的动载荷,车架的弯曲、偏心扭转和整体扭转将更严重,同时还会出现侧弯、菱形倾向,以及各种弯曲和扭转振动。同时,有些装置件还可能使车架产生较大的装置载荷。 随着计算机技术的发展,在产品开发阶段,对车架静应力、刚度、振动模态以至动应力和碰撞安全等已可进行有限元分析,对其轻量化、使用寿命,以及振动和噪声特性也可以做出初步判断,为缩短产品开发周期创造了有利条件。
电气自动化技术专业毕业设计 设计课题:基于PLC的运料小车控制系 统设计 学生姓名:陈博 学号: 022******* 指导老师:吴丽丽 专业:电气自动化技术 年级: 11级 2014年6月3日
摘要:随着科学技术的日新月异,对自动化程度要求越来越高,原有的生产线已不能满足要求。在工业生产中运料是一个非常重要的环节,但是其岗位对人体伤害较大或者是劳动负荷较大。所以运料小车在工业生产中发挥了重要作用,为企业节省了人力、物力等,节约了生产成本提高了经济效益。但是,相比传统接触器、继电器控制的运料小车电气控制线路比较复杂,不容易检修及维护。基于PLC的自动运料小车控制系统可以解决上述问题,因此对它的设计具有了现实可能性。 关键词:可编程控制器;三相异步电动机;运料小车
目录 引言 (1) 1运料小车需求分析 (2) 2运料小车控制系统的方案论证 (4) 2.1运料小车控制系统的控制内容与要求 (4) 2.1.1运料小车的运动流程 (4) 2.2方案论证 (4) 3运料小车控制系统的硬件配置 (5) 4运料小车控制系统的软件设计 (7) 4.1PLC I/O分配表 (8) 5程序的运行调试与仿真 (13) 6设计小结 (14) 6.1小车的优缺点分析 (14) 6.2设计的改进及推广 (14) 总结 (15) 致谢 (16) 参考文献 (17) 附录一 (18)
引言 可编程控制器是在计算机技术、通信技术和继电器控制技术的发展基础上开发起来的,最初叫做可编程逻辑控制器(Programmable Logic Controller),即PLC,现已广泛应用于工业控制的各个领域。 大规模集成电路和超大规模集成电路的出现使得PLC在问世后的发展极为迅速。现在,PLC不仅能实现继电器的逻辑控制功能,同时还具有数字量和模拟量的采集和控制、PID调节、通信联网、故障自诊断及DCS生产监控等功能。 毫无疑问,PLC将在今后的工业生产中起到非常重要的作用。在20世纪80年代,美国的工业市场调查报告和1989年美国的一份分散控制系统(DCS)的调研报告中,都能看出PLC在工业控制中的重要作用。
机电一体化课程设计 2012级 小车自动往返装卸料控制 学生姓名 学号 系别 专业班级 指导教师 完成日期
目录 目录....................................................................................................................................................................... I 1. 引言 (1) 2. 设计任务 (1) 2.1 设计内容 (1) 2.2 控制要求 (1) 1)手动控制方式 (1) 2)单步运行方式 (2) 3)单周期运行控制要求 (2) 4)自动循环控制方式要求 (2) 3.总体方案的确定 (2) 3.1 小车自动往返装卸料控制系统的构成 (2) 3.2 工作过程 (2) 3.3 方案设计 (3) 1)小车自动控制主电路图 (3) 2)PLC装卸料小车接线示意图 (3) 3)总体设计方案 (4) 4.控制系统软件设计 (4) 4.1小车自动往返装卸料控制流程图 (4) 4.2 I/O分配表 (5) 4.3 PLC程序设计 (5) 1)主程序中调用运行方式子程序 (5) 2)手动子程序运行 (6) 3)单步子程序运行 (7) 4)单周期子程序运行 (8) 4)自动子程序运行 (9) 4.4组态软件的界面设置 (10) 4.5 组态与PLC通信 (12) 4.6 程序调试与运行 (14) 1)手动方式 (14) 2)单步方式 (14) 3)单周期方式 (15) 4)自动方式 (15) 5.程序调试心得与建议 (15) 参考文献 (15)
海南大学 《汽车理论》 课程设计说明书 题目:汽车动力性计算 学号:20140507310069 姓名:郭东东 年级:2014级 学院:机电工程学院 系别:汽车系 专业:车辆工程 指导教师:张建珍 完成日期:2017年6月1日
目录 1. 题目要求 (1) 1.1. 题目要求 (3) 1.2. 车型参数 (4) 2. 计算步骤 (5) 2.1. 绘制功率外特性和转矩外特性曲线 (5) 2.2. 绘制驱动力——行驶阻力平衡图 (7) 2.3. 绘制动力特性图 (11) 2.4. 绘制加速度曲线和加速度倒数曲线 (14) 2.5. 绘制加速时间曲线 (21) 2.5.1. 二挡原地起步连续换挡加速时间曲线 (22) 2.5.2. 最高档和次高档超车加速时间 (26) 3. 结论分析 (32) 3.1. 汽车的最高车速u amax (32) 3.2. 汽车的加速时间t (32) 3.3. 汽车能爬上的最大坡度i max (33) 4. 心得体会 (33) 参考资料34
1.题目要求 1.1.题目要求 (1)根据书上所给的发动机使用外特性曲线拟合公式,绘制功率外特性和转矩外特性曲线; (2)绘制驱动力---行驶阻力平衡图; (3)绘制动力特性图; (4)绘制加速度时间曲线和加速度倒数曲线; (5)绘制加速时间曲线,包括原地起步连续换挡加速时间和最高档和次高档加速时间、加速区间(初速度和末速度)按照国家标准 GB/T12543-2009规定选取,并在说明书中具体说明选取; (6)对动力性进行总体评价。
1.2.车型参数 汽车发动机使用外特性-n曲线的拟合公式为 式中,T q为发动机转矩(N·m);n为发动机转速(r/min)。 发动机的最低转速n min=600r/min,最高转速n max=4000r/min 装载质量2000kg 整车装备质量1800kg 总质量3880kg 车轮半径0.367m 传动系机械效率ηT=0.84 滚动阻力系数f=0.016 空气阻力系数×迎风面积C D A=2.77m2 主减速器传动比i0=5.97 飞轮转动惯量I f=0.218kg·m2 二前轮转动惯量I W1=1.798kg·m2
编号 河南机电高等专科学校 毕业设计(论文) 自动往返运料小车控制系统设计 系部:自动控制系 专业: 电气自动化 班级: 自 124 姓名: 张晓需 学号: 121415404 指导老师: 赵新蕖 二零一五年五月
摘要 运料小车在煤矿、仓库、港口车站、矿井等行业中被广泛应用,而其控制系统就是一种典型的PLC系统。传统的运料小车大多是继电器控制,而继电器控制有着接线复杂、易出故障、维护维修不易等缺点。为了降低运料小车的运行成本,实现自动化控制,应用可编程控制技术作为小车的控制系统。 本设计针对电气控制的运料小车系统,利用组态软件和西门子S7200 PLC实现对运料小车系统的监测和控制。通过现场数据采集,进行集中的数据管理,从而实现对自动运料小车系统有效控制,系统状态实时监控,并由上位机生成可视化的动态监控界面。方便管理人员对现场的管理,提高工作效率。 关键词:运料小车;组态软件;PLC;传感器;
Abstract Carriage is widely used in coal mine, warehouse, station, port mine and other industries, and its control system is a typical PLC system. The transport cars most of the traditional relay control, relay control with complex wiring, easy maintenance, fault repair defect is not easy. In order to reduce the operation cost of material transport trolley, automatic control system, the application of programmable control technology as the control system of car. The design for the carriage of electric control system, realize the monitoring and control of material transport trolley system using configuration software and S7200 PLC Siemens.Through the field data acquisition, data management, so as to realize the automatic control of material transport trolley system, real-time monitoring system status, and made the dynamic monitoring interface PC to generate visual. Management to facilitate the management of the site, improve work efficiency. Keywords: Material transport trolley;configuration software; PLC; sensor;
目录 引言 ........................................................... I 1设计任务与要求 (1) 2PLC控制系统的硬件设计 (2) PLC机型的选择 (2) PLC容量估算 (3) 系统I/O地址的分配 (3) 安全回路设计 (4) 、 计算机和PLC的链接通信 (5) 3运料小车PLC控制的软件设计 (5) STEP7-M ICRO/WIN编程软件 (6) 运料小车控制梯形图设计 (7) 运料小车控制语句表设计 (9) 运料小车PLC控制设计说明 (11) 4 PLC控制系统的抗干扰性设计 (11) 抗电源干扰的措施 (12) 《 控制系统的接地设计 (12) 防I/O干扰的措施 (13) 5 PLC控制系统的调试 (13) 6小结 (14) 7参考文献 (14)
引言 运料小车自动控制 随着经济的发展,运料小车不断扩大到各个领域,从手动到自动,逐渐形成了机械化,自动化。将PLC应用到运料小车电气控制系统,可实现运料小车的自动化控制,降低系统的运行费用。它功能强大,可扩展到128I/O点。且能增加特殊功能模块或扩展板。PLC在运料小车控制系统中的应用,具有巨大的经济和社会价值。本文以PLC控制技术为核心,采用SIEMENS公司的S7-200系列的PLC,论述了运料小车控制的软硬件设计方案及其控制原理,实现了运料小车自动控制。
1 设计任务与要求 (1)设计任务 图 运料小车示意图 运料小车由一台三相异步电动机拖动,电机正转,小车向右行,电机反转,小向左行。电动机正反转图如图所示: 在生产线上有5个编号为l ~5的站点供小车停靠,在每一个停靠站安装一个行程开关以监测小车是否到达该站点。对小车的控制除了启动按钮和停止按钮之外,还设有5个呼叫按钮开关(SB1~SB5)分别与5个停靠站点相对应。 图 三相异步电动机正反转主电路图 自动化生产 运料小车 1 号 _____ 2号站 4号站 3号站 5号站
综合成绩优秀()良好()中等()及格() 不及格() 教师(签名) 批改日期2015年月日PLC应用综合设计报告 院系电子与电气工程学院 专业电气工程及其自动化 课题小车装卸料的PLC控制 班级学号 姓名 2015 年06月
PLC应用综合设计调试记录 班级:学号姓名: 调试过程与结果(概要) 一、小车装卸料的PLC控制 按下启动按钮(I0.0)和A点行程开关(I0.4)启动。Q4.0得电,电机右移。当触碰到B点的行程开关(I0.5)时,停3秒。Q4.1得电,电机左移,当触碰到A点的行程开关时,在A点停2秒,然后继续右移。当触碰到C点的行程开关(I0.6)时,停2秒。Q4.1得电,电机左移,当触碰到A点的行程开关时,在A 点停2秒,然后继续右移。当触碰到D点的行程开关(I0.7)时,停2秒。然后返回到A点继续上述步骤。 教师检查调试情况调试成功()调试基本成功()调试失败()现场答辩情况通过()未通过()教师签名日期
课题一、小车装卸料的PLC控制 一、控制要求 1.基本要求 某小车在A点装满料后,按启动按钮(SB1),则向右运行至B点,等待卸料3秒后返回,到A点等待装料2秒后再向右运行至C点(B点右边),等待卸料3秒后返回至A点,在A点等待装料2秒后再向右运行至D点(C点右边),等待3秒后返回A点再等待2秒后右行至B点……如此循环工作。按停止按钮(SB2)则本次卸料完成返回至A点停止运行。(A、B、C、D点都装有行程开关) 2.提示 每一个循环第一次到达B、C点时停止,后面再到继续右行,使用基本逻辑指令设计程序在第一次到B、C点停止后分别用中间继电器自锁记忆,用其触点有B、C点的行程开关常闭点并联以决定是否停车。一个循环结束后找到逻辑条件断开两中间继电器。也可以用移位指令设计程序,逻辑相对简单。按停止按钮后不是立刻停止,因此应该用以中间继电器自锁直至到达A点在产生真正停止逻辑,该中间继电器可以在按启动按钮时断开。 图5 小车装卸料的工作示意图
目录 目录 (1) 摘要 (3) 1 汽车的总体设计 (1) 1.1汽车总体设计的一般顺序 (1) 1.2布置形式 (4) 1.3轴数选择 (4) 1.4驱动形式的选择 (4) 2 载货汽车主要技术参数的确定 (5) 2.1 汽车质量参数的确定 (5) 2.1.1汽车载荷质量的确定 (5) 2.1.2 整车整备质量的预估 (5) 2.1.3 汽车总质量的确定 (5) 2.1.4 汽车的轴荷分配 (5) 2.2汽车主要尺寸的确定 (5) 2.2.1汽车的主要尺寸 (5) 2.2.2 汽车的外廓尺寸 (6) 2.3汽车主要性能参数的确定 (6) 2.3.1 汽车动力性参数的确定 (6) 2.3.2 汽车燃油经济性参数的确定 (6) 2.3.3 汽车通过性性参数的确定 (6) 3 货汽车主要部件的选择及布置 (7) 3.1 发动机的选择与布置 (7) 3.1.1 发动机型式的选择 (7) 3.1.2 发动机主要性能指标的选择 (7) 3.2轮胎的选择 (10) 3.3离合器的选择 (10) 3.4万向传动轴的选择 (10) 3.5主减速器的选择 (10) 4 总体布置的计算 (11) 4.1 轴荷分配及质心位置计算 (11) 4.1.1平静时的轴荷分配及质心位置 (11) 4.1.2 水平路面上汽车满载行驶时各轴的最大负荷计算 (13) 4.1.3 制动时各轴的最大负荷计算 (14) 4.2 驱动桥主减速器传动比的选择 (15) 4.3 变速器传动比的选择 (15) 4.3.1 变速器一档传动比的选择 (15) 4.3.2 变速器档数和各档传动比的选择 (15) 5 汽车动力性及燃油经济性计算 (17) 5.1 汽车动力性能的计算 (17) 5.1.1驱动平衡的计算 (17) 5.1.2动力特性的计算 (19) 5.2功率平衡计算 (22)
项目七PLC控制运料小车的运行 1.项目任务 本项目的任务设计一个运料小车往返运动PLC控制系统。系统控制要求如下:小车往返运动循环工作过程说明如下:小车处于最左端时,压下行程开关SQ4,SQ4为小车的原位开关。按下启动按钮SB2,装料电磁阀YC1得电,延时20s,小车装料结束。接着控制器KM3、KM5得电,向右快行;碰到限位开关SQ1后,KM5失电,小车慢行;碰到SQ3时,KM3失电,小车停止。此后,电磁阀YC2得电,卸料开始,延时15s后,卸料结束;接触器KM4、KM5得电,小车向左快行;碰到限位开关SQ2,KM5失电,小车慢行;碰到SQ4KM4失电,小车停止,回到原位,完成一个循环工作过程。整个过程分为装料、右快行、右慢行、卸料、左快行、左慢行六个状态,如此周而复始的循环。 图7-1 运料小车往返运动示意图
2.任务流程图 本项目的具体学习过程见图2-2。 图7-2 任务流程图 学习所需工具、设备见表7-1。 表7-1 工具、设备清单 1.功能图编程的特点 功能图也叫状态图。它是用状态元件描述工步状态的工艺流程图。 功能转移图与步进梯形图表达的都是同一个程序,其优点是让用户每次考虑一个状态,而不必考虑其它的状态,从而使编程更容易,而且还可以减少指令的程序步数。功能转移图中的一个状态表示顺序控制过程中的一个工步,因此步进梯形图也特别适用于时间和位移等顺序的控制过程,也能形象、直观的表示顺序控制。 功能编程开始时,必须用STL使STL接点接通,从而使主母线与子母线接通,连在子母线上的状态电路才能执行,这时状态就被激活。 状态的三个功能是在子母线上实现的,所以只有STL接点接通该状态的负载驱动和状态转移才能被扫描执行。反之,STL接点断开,对应状态就为被激活,前一状态就自动关闭。状态编程的这一特点,使各状态之间的关系就像是一环扣一环的链表,变得十分清晰单纯,不相邻状态间的繁杂连锁关系将不复存在,只需集中考虑实现本状态的三大功能既可。另外,这也使程序的可读性更好,便于理解,也使程序的调试、故障的排除变得相对简单。 7-2步进梯形图 在状态编程的最后,必须使用步进返回指令RET,从子母线返回主母线。如图7-3程序中,若没有RET指令,会将后面所有还看成是当前状态S22中的指令,由于PLC程序是循环扫描的,也包括了最开始处的指令,这就会引起程序出错而不能运行。 2.功能图的编程规则 (1)初始状态的编程。 初始状态一般是指一个顺控工艺最开始的状态,对应于状态转移图初始位置是状态就是初始状态。S0~S9共10个状态组件专用作初始状态,用了几个初始状态,就可以有
自动运料小车PL C 控制系统设计 随着生产自动化程度越来越高, PLC 在生产过程控制系统中的应用也越来越广泛。 可编程逻辑控制器,简称 PLC 是一种工业控制微型计算机。它的编程方便、操作简单尤其是高通 用性等优点,使它在工业生产过程中得到了广泛的应用。 其中的一个应用便是运料小车的控制, 主要用 到的便是它的逻辑控制功能。 控制要求 1. 运料小车在自动化生产线上运动的控制要求如下: (1) 按下启动按钮,系统开始工作,按下停止按钮,系统停止工作; (2) 当小车当前所处停靠站的编码小于呼叫按扭 HJ 的编码时,小车向右运行运行到按钮 HJ 所对 应的停靠站时停止; (3) 当小车当前所处停靠站的编码大于呼叫按扭 对应的停靠站时停止; (4) 当小车当前所处停靠站的编码等于呼叫按扭 (5) 呼叫按钮开关 HJ1--HJ5应具有互锁功能 2. 运料小车的运动分析: HJ 的编码时,小车向左运行,运行到按钮 HJ 所 HJ 的编码时,小车保持不动; 先按下者优先。 某自动生产线上运料小车的运动如图所示, 运料小车由一台三相异步电动机拖动, 电机正转,小车 向右行,电机反转,小车向左行。在生产线上有 5个编码为1 — 5的站点供小车停靠,在每个停靠站安 装一个行程开关以监测小车是否到达该站点。对小车的控制除了启动按钮和停止按钮之外,还设有 5 个呼叫按钮开关(HJ1-- HJ5 )分别与5个停靠站点相对应。 自动运料小车示意图 程序设计 1. 行程开关
在该程序中,5个站的行程开关分别用数字0-4来表示,当小车在1号站时,行程开关 X007得电,将数字0传送到数据寄存器D0;当小车在2号站时,行程开关X010得电,将数字1传送到数据寄存器D(。依次类推,当小车在5号站时,行程开关X013寻电,将数字4传送到数据寄存器D0。它的助记符程序为: LD X007 MOV K0D0;小车在1号站 LD X010 MOV K1D0;小车在2号站 LD X011 MOV K2D0;小车在3号站 LD X012 MOV K3D0;小车在4号站 LD X013 MOV K4D0;小车在5号站 所对应的梯形图如下所示: 行程开关梯形图 2. 小车启停辅助继电器 当按下启动按钮时,小车开始运动,该辅助继电器M0寻电;当按下停止按钮时,小车停止运动,该辅助继电器M(失电。它的助记符程序为: LD X000 OR M0 ANI X001 OUT M0 ;小车启停辅助继电器 所对应的梯形图如下所示: 小车启停辅助继电器梯形图 3. 呼叫按钮 在该程序中,5个站的呼叫按钮分别用数字0-4来表示,而且由于5个呼叫按钮开关HJ1— HJ5具有互锁功能,先按下者优先,所以需5个辅助继电器M1-M5当按下1号站呼叫按钮开关时,行程开关X002得电,数字0传送到数据寄存器D1,同时1号按钮开关辅助继电器得电;当按下2号站呼叫按钮开关时,行程开关X003寻电,数字1传送到数据寄存器D1,同时2号按钮开关辅助继电器得电;依次类推,当按下5号站呼叫按钮开关时,行程开关X006 得电,数字4传送到数据寄存器D1,同时5号按钮开关辅助继电器得电;它的助记符程序为: LDI M2 ANI M3 ANI M4 ANI M5 ANI X007
搅拌车装卸料安全操作规 程示范文本 In The Actual Work Production Management, In Order To Ensure The Smooth Progress Of The Process, And Consider The Relationship Between Each Link, The Specific Requirements Of Each Link To Achieve Risk Control And Planning 某某管理中心 XX年XX月
搅拌车装卸料安全操作规程示范文本使用指引:此操作规程资料应用在实际工作生产管理中为了保障过程顺利推进,同时考虑各个环节之间的关系,每个环节实现的具体要求而进行的风险控制与规划,并将危害降低到最小,文档经过下载可进行自定义修改,请根据实际需求进行调整与使用。 70 / 186 28 .搅拌车装搅拌车装搅拌车装卸料安全操作规程 卸料安全操作规程卸料安全操作规程卸料安全操作规程 1 目的 规范员工行为,实现作业标准化,确保人身和设备安 全 2 范围 适用于混凝土搅拌车装、卸料操作过程 3 风险辨识 车辆伤害、机械高空坠落物体打击 4 防护用品 工作服、安全帽鞋反光衣
5 操作流程 5.1 作业前 5.1.1 出车前要检查行证件是否齐全(驾驶、通等)。出车前要检查行证件是否齐全(驾驶、通等)。 5.1.2 出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等)出车前对搅拌进行日常检查(轮胎、刹灯光油位水等),正常后方可上路行驶。 5.1.3 启动车辆,在指定区域内将罐积水排放干净把体调至装料状态启动车辆,在指定区域内将罐积水排放干净
智能小车说明书 公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-
基于STC12C5A60S2 单片机智能 轮式小车设计 摘要:以STC12C5A60S2 单片机为核心,由主控模块、传感器模块、电机驱动模块等组成,完成路面信息检测、循迹,寻找火源,直流电机控制等功能。路面信息检测、循迹采用红外光电寻迹传感器判断接收地面反射光线的方式反馈,通过高低电平来进行路面检测、路径判断;寻找火源采用火焰传感器判断火源所在方位;电机直流驱动则用来保证小车以最快的速度行驶。 关键词:智能小车、STC12C5A60S2 单片机、红外传感器、循迹传感器、碰撞传感器、直流电机 目录
引言 只能作为现代社会的新产物是以后的发展方向。它可以按照预先设定的模块在一个特定的环境里自动的运作,无需人为管理,便可以完成预期所要达到的或更高的目标。 本次设计一智能小车,小车能够沿着特定轨迹行驶,躲避障碍物并能准确寻找到火源,发出警告功能。在此过程中要通过单片机和各种传感器实现小车的前进、后退、左转和右转等基本操作。通过这些基本功能再加上相关的传感器实现具有特定功能的智能小车。这里在履带式小车上加装红外反射、循迹、火焰传感器,在STC12C5A60S2 单片机的管理和相关程序的控制下,能完成自动循迹及在复杂地形的迷宫中寻找出路的功能。 作品可以作为高级智能玩具,也可以作为大学生学习嵌入式控制的强有力的应用实例,该系统将会有更广阔的开发前景。
一.总体设计方案 设计方案论证 本次设计采用红外传感器来判定前方障碍的有无,使小车遇到障碍物时能即使的避免的功能;采用火焰传感器来实现寻找火源的功能;采用红外寻迹传感器来实现小车沿黑线前进的寻迹功能;采用STC12C5A60S2单片机来控制小车的各项基本操作。 方案的总体设计框图 本次创新设计所用到的硬件模块有:中央处理器模块、传感器模块、直流 电机驱动模块、调试电路模块。 中央处理器模块 本文采用的STC12C5A60S2单片机是宏晶科技生产的单时钟/机器周期(1T)的单片机,是高速/低功耗/超强抗干扰的新一代8051单片机,指令代码完全兼容传统8051,但速度快8-12倍。内部集成MAX810专用复位电路,2路PWM,8路高速10位A/D转换(250K/S),针对电机控制,强干扰场合。
基于运料小车自动往返顺序控制的PLC程序 2008-09-12来源:中国自动化网浏览:1211 摘要:本文基于运料小车自动往返顺序控制PLC程序设计,提出五种PLC程序设计方法,对各种设计方法思路和特点,作了全面阐述和归纳总结,并对它们进行了比较。 关键词:PLC,顺序控制,顺序功能图,梯形图,指令。 1 引言 自动化生产线上,有些生产机械工作台需要按一定顺序实现自动往返运动,有还要求某些位置有一定时间停留,以满足生产工艺要求。用PLC程序实现运料小车自动往返顺序控制,具有程序设计简易、方便、可靠性高等特点,程序设计方法多样,便于不同层次设计人员理解和掌握。本文以松下电工FP0系列PLC为例,提出基于运料小车自动往返顺序控制五种PLC程序设计方法。 2 系统控制要求[1> 运料小车自动往返顺序控制系统示意图,如图1所示,小车启动前位于原位A处,一个工作周期流程控制要求如下: 1)按下启动按钮SB1,小车从原位A装料,10秒后小车前进驶向1号位,到达1号位后停8秒卸料并后退; 2)小车后退到原位A继续装料,10秒后小车第二次前进驶向2号位,到达2号位后停8秒卸料并再次后退返回原位A,然后开始下一轮循环工作; 3)若按下停止按钮SB2,需完成一个工作周期后才停止工作。
图3运料小车自动往返顺序控制系统顺序功能图4.1 经验设计法[3>
经验设计法是生产机械工艺要求和生产过程,典型单元程序基础上,做一定修改和完善。使用经验设计法设计梯形图程序,如图4所示。系统控制要求小车原位A(X2)处装料,1号位(X3)和2号位(X4)两处轮流卸料。小车一个工作循环中有两次前进都要碰到X3,第一次碰到它时停下卸料,第二次碰到它时要继续前进,应设置一个具有记忆功能内部继电器R1,区分是第一次第二次碰到X3。小车第一次碰到X3和碰到X4时都应停止前进,将它们常闭触点与Y2线圈串联,同时,X3常闭触点并联了内部继电器R1常开触点,使X3停止前进作用受到R1约束,R1作用是记忆X3是第几次被碰到,它只小车第二次前进X3时起作用。它起动条件和停止条件分别是小车碰到X3和X4,当小车第一次前进X3时,R1线圈接通,使R1常开触点将Y2控制电路中X3常闭触点短接,小车第二次X3时不会停止前进,直至到达X4时,R1才复位。此外,将R1另一对常开触点与X0并联,为第二次驱动Y0装料做准备。
河南机电高等专科学校 毕业设计(论文) 自动往返运料小车控制系统设计 系部:自动控制系 专业: 电气自动化 班级: 自 124 姓名: 张晓需 学号: 指导老师: 赵新蕖 二零一五年五月
摘要 运料小车在煤矿、仓库、港口车站、矿井等行业中被广泛应用,而其控制系统就是一种典型的PLC系统。传统的运料小车大多是继电器控制,而继电器控制有着接线复杂、易出故障、维护维修不易等缺点。为了降低运料小车的运行成本,实现自动化控制,应用可编程控制技术作为小车的控制系统。 本设计针对电气控制的运料小车系统,利用组态软件和西门子S7200 PLC实现对运料小车系统的监测和控制。通过现场数据采集,进行集中的数据管理,从而实现对自动运料小车系统有效控制,系统状态实时监控,并由上位机生成可视化的动态监控界面。方便管理人员对现场的管理,提高工作效率。 关键词:运料小车;组态软件;PLC;传感器;
Abstract Carriage?is widely used in?coal mine,?warehouse,?station,?port?mine?and other industries,?and its control system?is?a?typical PLC system.?The transport cars?most of the traditional relay control,?relay control?with complex wiring,?easy?maintenance,?fault?repair?defect?is not easy.?In order to reduce the operation cost?of material transport trolley,?automatic control system,?the application of programmable?control?technology as the control?system?of car. The design for the?carriage?of electric control system,?realize the?monitoring and control of material transport trolley?system using configuration software and?S7200?PLC?Siemens.Through the field data acquisition,?data?management,?so as to realize the?automatic?control?of material transport trolley?system,?real-time monitoring system status,?and made the dynamic monitoring?interface PC?to generate visual.?Management?to facilitate the management of the site,?improve work efficiency. Keywords:?Material transport trolley;configuration software;?PLC;??sensor;?