风力机的Mat l ab 模型及其应用
班级:能动学院2010级 姓名:常征
学号:20101191
摘要:提出了一种简化的定桨距风力机的MATLAB 模型。该模型对少风电场的建设与规划。对于风力发电机组的运行仿真和设计都具有重要的意义。 关键词:MATLAB 模型,建模仿真 1.风力机模型的建立
目前,风电中采用最多的仍是并网型定桨距恒速恒频异步发电系统,其主要组成部分包括:风轮、变速箱、发电机、控制器、电容器组。进行各种状态下风力发电机组的动态仿真,对其运行和设计具有重要意义。Matlab/Simulink 仿真软件具有强大的功能,其中Simulink 模块化的结构有助于将复杂的风电系统分解为各个简单的基本“物理”模块,适宜用来分析风力发电机组的各种运行状态。
目前有关用Matlab/Simulink 模块对风力机进行建模和仿真的资料很少,全文的风力机模型可作为其中的一个模块。
实际发电时,因异步机并网发电时滑差s<0且接近0,简化分析可取s=0时的同步转速ωs 作为风力机带负载运行的固定频率点(ω1/ωs ),即风力机实际运行在固定的ω1下,选择不同的ω1全年发电量是不同的,风能利用仿真就是要在确定的风力资源统计规律和确定的风力机特性基础上,选择ω1(工作点)使全年风力机提供的能量最大,进而得出升速箱的最优变比,并选择升速箱。
根据以下风力机计算公式,构建Matlab 风力机特性仿真模块。
υωλ/R = (1)
式中:λ为叶尖速比;υ为上游风速m/s ;ω为风机角速度rad/s ;R 为叶轮半径m 。
32)(2
1
R C T υλρπ=
(2)
式中:T 为风轮转矩;ρ为空气密度kg/m 3;转矩系数的拟合函数采用i i i C λααλ∑=+=6
10)(,,
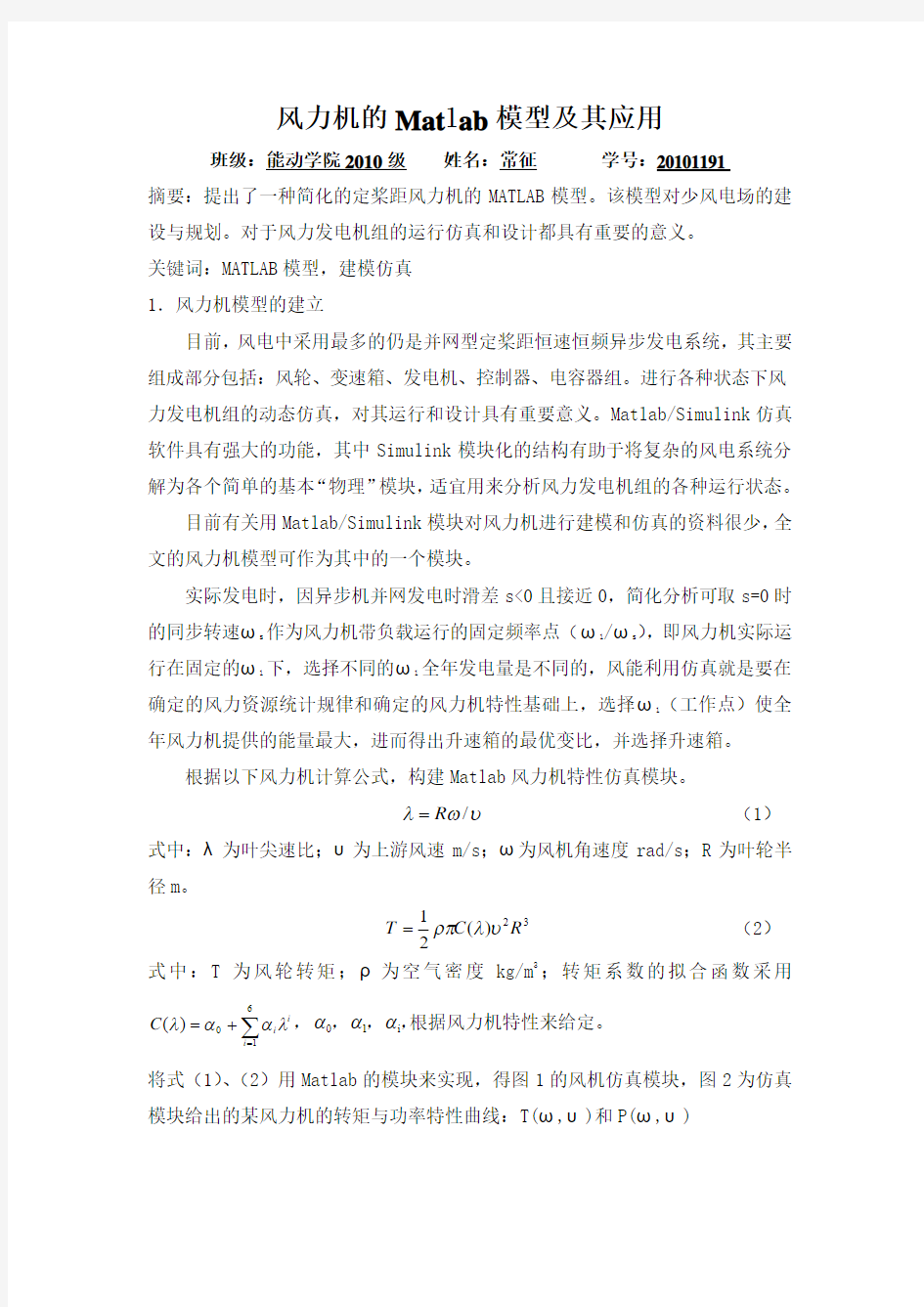
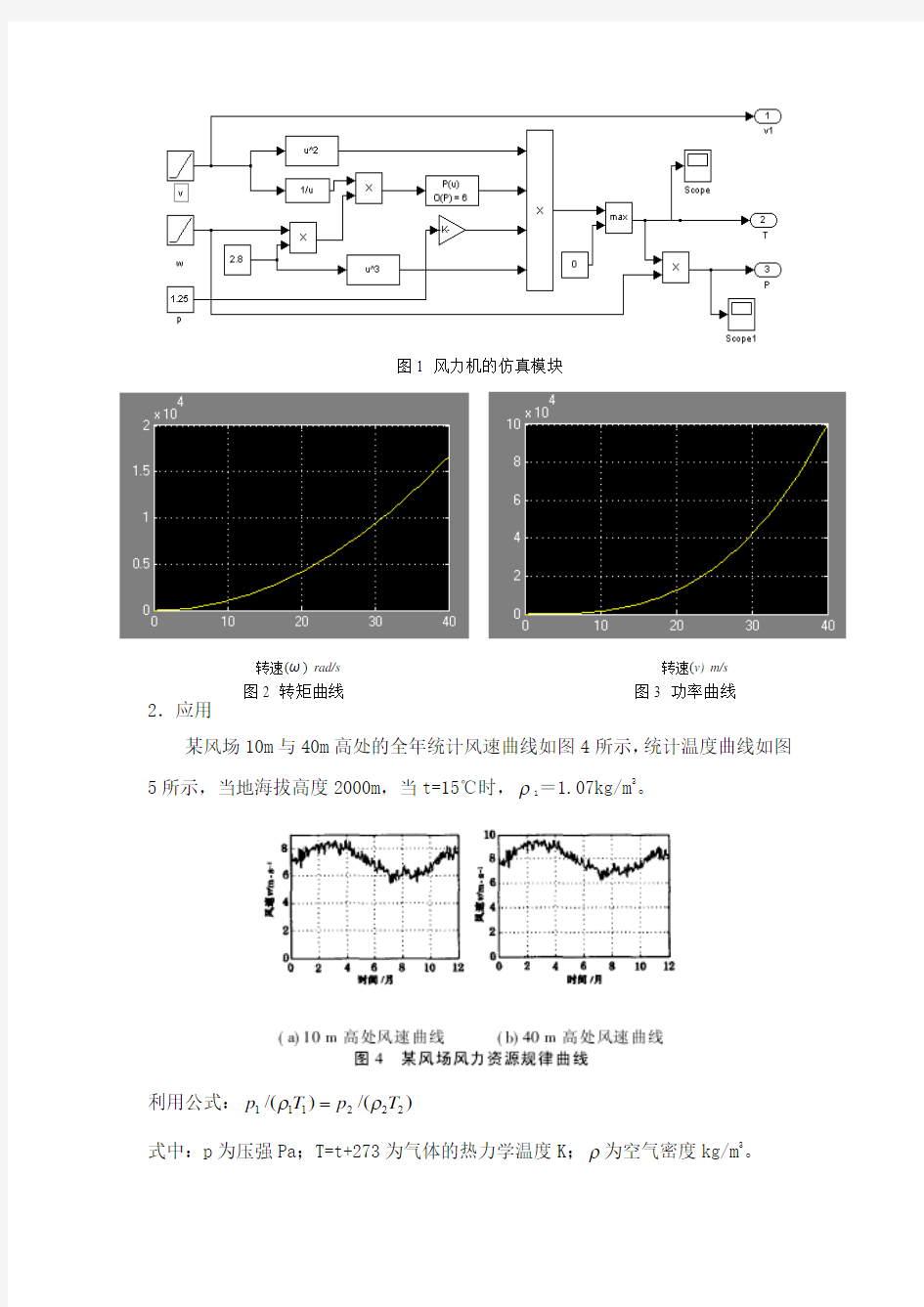
,,i 10ααα根据风力机特性来给定。 将式(1)、(2)用Matlab 的模块来实现,得图1的风机仿真模块,图2为仿真模块给出的某风力机的转矩与功率特性曲线:T(ω,υ)和P(ω,υ)
2.应用
某风场10m 与40m 高处的全年统计风速曲线如图4所示,统计温度曲线如图5所示,当地海拔高度2000m ,当t=15℃时,ρ1=1.07kg/m 3。
利用公式:)/()/(222111T p T p ρρ=
式中:p 为压强Pa ;T=t+273为气体的热力学温度K ;ρ为空气密度kg/m 3。
图2 转矩曲线 转速(v) m/s
图3 功率曲线
转速(ω) rad/s
转矩(T ) N ·m
功率(P ) k W
图1 风力机的仿真模块
由风速、温度曲线可以得出风力机的发电量与转速的关系。由风力机的发电
量与转速的关系可知,在10m高处转速应选ω
1与ω
3
之间的1个数ω
1
,应选变比
为k
1=ω
s
/ω
1
的升速箱。40m高处转速应选ω
2
与ω
4
之间的1个数ω
2
,所以应选
变比为k
2=ω
s
/ω
2
升速箱。这样才能使风力机的年发电量最大。风力机模块还可
以跟变速箱模块、发电机模块、控制器模块配合共同构成风力发电机系统,用于风力发电机组的仿真计算。
3.结论
本文提出了一种简化的定桨距风力机的Matlab模型。该模型对风电场的建设与规划,对风力发电机组的运行仿真和设计都具有重要的意义。
元胞自动机NaSch模型及其MATLAB代码 作业要求 根据前面的介绍,对NaSch模型编程并进行数值模拟: ●模型参数取值:Lroad=1000,p=0.3,Vmax=5。 ●边界条件:周期性边界。 ●数据统计:扔掉前50000个时间步,对后50000个时间步进行统计,需给出的 结果。 ●基本图(流量-密度关系):需整个密度范围内的。 ●时空图(横坐标为空间,纵坐标为时间,密度和文献中时空图保持一致, 画 500个时间步即可)。 ●指出NaSch模型的创新之处,找出NaSch模型的不足,并给出自己的改进思 路。 ●流量计算方法: 密度=车辆数/路长; 流量flux=density×V_ave。 在道路的某处设置虚拟探测计算统计时间T内通过的车辆数N; 流量flux=N/T。 ●在计算过程中可都使用无量纲的变量。 1、NaSch模型的介绍 作为对184号规则的推广,Nagel和Schreckberg在1992年提出了一个模拟车辆交通的元胞自动机模型,即NaSch模型(也有人称它为NaSch模型)。 ●时间、空间和车辆速度都被整数离散化。
● 道路被划分为等距离的离散的格子,即元胞。 ● 每个元胞或者是空的,或者被一辆车所占据。 ● 车辆的速度可以在(0~Vmax )之间取值。 2、NaSch 模型运行规则 在时刻t 到时刻t+1的过程中按照下面的规则进行更新: (1)加速:),1min(max v v v n n +→ 规则(1)反映了司机倾向于以尽可能大的速度行驶的特点。 (2)减速:),min(n n n d v v → 规则(2)确保车辆不会与前车发生碰撞。 (3)随机慢化: 以随机概率p 进行慢化,令:)0, 1-min(n n v v → 规则(3)引入随机慢化来体现驾驶员的行为差异,这样既可以反映随机加速行为, 又可以反映减速过程中的过度反应行为。这一规则也是堵塞自发产生的至关重要因素。 (4)位置更新:n n n v x v +→ ,车辆按照更新后的速度向前运动。 其中n v ,n x 分别表示第n 辆车位置和速度;l (l ≥1)为车辆长度; 11--=+n n n x x d 表示n 车和前车n+1之间空的元胞数;p 表示随机慢化概率;max v 为最大速度。 3、NaSch 模型实例 根据题目要求,模型参数取值:L=1000,p=0.3,Vmax=5,用matlab 软件进行编程,扔掉前11000个时间步,统计了之后500个时间步数据,得到如下基本图和时空图。 3.1程序简介 初始化:在路段上,随机分配200个车辆,且随机速度为1-5之间。 图3.1.1是程序的运行图,图3.1.2中,白色表示有车,黑色是元胞。
1.绘制云图 Ex=18 En=2 He=0.2 hold on for i=1:1000 Enn=randn(1)*He+En; x(i)=randn(1)*Enn+Ex; y(i)=exp(-(x(i)-Ex)^2/(2*Enn^2)); plot(x(i),y(i),'*') end Ex=48.7 En=9.1 He=0.39 hold on for i=1:1000 Enn=randn(1)*He+En; x(i)=randn(1)*Enn+Ex; y(i)=exp(-(x(i)-Ex)^2/(2*Enn^2)); plot(x(i),y(i),'*')
end 2.求期望、熵及超熵 X1=[51.93 52.51 54.70 43.14 43.85 44.48 44.61 52.08]; Y1=[0.91169241573 0.921875 0.96032303371 0.75737359551 0.76983848315 0.7808988764 0.78318117978 0.9143258427]; m=8; Ex=mean(X1) En1=zeros(1,m); for i=1:m En1(1,i)=abs(X1(1,i)-Ex)/sqrt(-2*log(Y1(1,i))); end En=mean(En1); He=0; for i=1:m He=He+(En1(1,i)-En)^2; end En=mean(En1) He=sqrt(He/(m-1)) 3.平顶山so2环境: X1=[0.013 0.04 0.054 0.065 0.07 0.067 0.058 0.055 0.045]; Y1=[0.175675676 0.540540541 0.72972973 0.878378378
模型((P C2R)的MATLAB程序 clear X=[]; %用户输入多指标输入矩阵X Y=[]; %用户输入多指标输出矩阵Y n=size(X',1); m=size(X,1); s=size(Y,1); A=[-X' Y']; b=zeros(n, 1); LB=zeros(m+s,1); UB=[]; for i=1:n; f= [zeros(1,m) -Y(:,i)']; Aeq=[X(:,i)' zeros(1,s)]; beq=1; w(:,i)=LINPROG(f,A,b,Aeq,beq,LB,UB); %解线性规划,得DMU;的最佳权向量w; E(i, i)=Y(:,i)'*w(m+1:m+s,i); %求出DMU i的相对效率值E ii end w %输出最佳权向量 E %输出相对效率值E ii Omega=w(1:m,:) %输出投入权向量。 mu=w(m+1:m+s,:) %输出产出权向量。 模型(D C2R)的MATLAB程序 clear X=[]; %用户输入多指标输入矩阵X Y=[]; %用户输入多指标输出矩阵Y n=size(X',1); m=size(X,1); s=size(Y,1); epsilon=10^-10; %定义非阿基米德无穷小 =10-10 f=[zeros(1,n) -epsilon*ones(1,m+s) 1]; %目标函数的系数矩阵: 的系数为0,s-,s+的系数为- e, 的系数为1; A=zeros(1,n+m+s+1); b=0; %<=约束; LB=zeros(n+m+s+1,1); UB=[]; %变量约束; LB(n+m+s+1)= -Inf; %-Inf表示下限为负无穷大。 for i=1:n; Aeq=[X eye(m) zeros(m,s) -X(:,i) Y zeros(s,m) -eye(s) zeros(s,1)]; beq=[zeros(m, 1 ) Y(:,i)]; w(:,i)=LINPROG (f,A,b,Aeq,beq,LB,UB); %解线性规划,得DMU的最佳权向量w; end w %输出最佳权向量 lambda=w(1:n,:) %输出 s_minus=w(n+1:n+m,:) %输出s- s_plus=w(n+m+1:n+m+s,:) %输出s+ theta=w(n+m+s+1,:) %输出
实验一用MATLAB处理系统数学模型 一、实验原理 表述线性定常系统的数学模型主要有微分方程、传递函数、动态结构图等.求拉氏变换可用函数laplace(ft,t,s),求拉式反变换可用函数illaplace(Fs,s,t);有关多项式计算的函数主要有roots(p),ploy(r),conv(p,q),ployval(n,s);求解微分方程可采用指令 s=dslove(‘a_1’,’a_2’,’···,’a_n’);建立传递函数时,将传递函数的分子、分母多项式的系数写成两个向量,然后用tf()函数来给出,还可以建立零、极点形式的传递函数,采用的函数为zpk(z,p,k);可用函数sys=series(sys1,sys2)来实现串联,用 sys=parallel(sys1,sys2)来实现并联,可用函数sys=feedback(sys1,sys2,sign)来实现系统的反馈连接,其中sign用来定义反馈形式,如果为正反馈,则sign=+1,如果为负反馈,则sign=-1。 二、实验目的 通过MATLAB软件对微分方程、传递函数和动态结构图等进行处理,观察并分析实验结果。 三、实验环境 MATLAB2012b 四、实验步骤 1、拉氏变换 syms s t; ft=t^2+2*t+2; st=laplace(ft,t,s) 2、拉式反变换 syms s t; Fs=(s+6)/(s^2+4*s+3)/(s+2); ft=ilaplace(Fs,s,t) 3、多项式求根 p=[1 3 0 4]; r=roots(p) p=poly(r) 4、多项式相乘 p=[ 3 2 1 ];q=[ 1 4];
云模型简介及个人理解m a t l a b程序 集团档案编码:[YTTR-YTPT28-YTNTL98-UYTYNN08]
随着不确定性研究的深入,越来越多的科学家相信,不确定性是这个世界的魅力所在,只有不确定性本身才是确定的。在众多的不确定性中,和是最基本的。针对和在处理不确定性方面的不足,1995年我国工程院院士教授在概率论和模糊数学的基础上提出了云的概念,并研究了模糊性和随机性及两者之间的关联性。自李德毅院士等人提出云模型至今,云模型已成功的应用到、、、智能控制、等众多领域. 设是一个普通集合。 , 称为论域。关于论域中的模糊集合,是指对于任意元素都存在一个有稳定倾向的随机数,叫做对的隶属度。如果论域中的元素是简单有序的,则可以看作是基础变量,隶属度在上的分布叫做隶属云;如果论域中的元素不是简单有序的,而根据某个法则,可将映射到另一个有序的论域上,中的一个且只有一个和对应,则为基础变量,隶属度在上的分布叫做隶属云[1] 。 数字特征
云模型表示自然语言中的基元——语言值,用云的数字特征——期望Ex,熵En和超熵He表示语言值的数学性质 [3] 。 期望 Ex:云滴在论域空间分布的期望,是最能够代表定性概念的点,是这个概念量化的最典型样本。 熵 En:“熵”这一概念最初是作为描述热力学的一个状态参量,此后又被引入统计物理学、信息论、复杂系统等,用以度量不确定的程度。在云模型中,熵代表定性概念的可度量粒度,熵越大,通常概念越宏观,也是定性概念不确定性的度量,由概念的随机性和模糊性共同决定。一方面, En是定性概念随机性的度量,反映了能够代表这个定性概念的云滴的离散程度;另一方面,又是定性概念亦此亦彼性的度量,反映了在论域空间可被概念接受的云滴的取值范围。用同一个数字特征来反映随机性和模糊性,也必然反映他们之间的关联性。 超熵 He:熵的不确定性度量,即熵的熵,由熵的随机性和模糊性共同决定。反映了每个数值隶属这个语言值程度的凝聚性,即云滴的凝聚程度。超熵越大,云的离散程度越大,隶属度的随机性也随之增大,云的厚度也越大。
用m a t l a b实现碰撞模型程序代码 标准化工作室编码[XX968T-XX89628-XJ668-XT689N]
c l c; clear; fill([6,7,7,6],[5,5,0,0],[0,0.5,0]);%右边竖条的填充 holdon;%保持当前图形及轴系的所有特性 fill([2,6,6,2],[3,3,0,0],[0,0.5,0]);%左边竖条的填充 holdon;%保持当前图形及轴系的所有特性 t1=0:pi/60:pi; plot(4-2*sin(t1-pi/2),5-2*cos(t1-pi/2));%绘制中间的凹弧图形gridon;%添加网格线 axis([0,9,0,9]);%定义坐标轴的比例% axis('off');%关闭所有轴标注,标记,背景 fill([1,2,2,1],[5,5,0,0],[0,0.5,0]);%中间长方形的填充 holdon;%保持当前图形及轴系的所有特性 title('碰撞');%定义图题 x0=6; y0=5; head1=line(x0,y0,'color','r','linestyle','.','erasemode','xor','marke rsize',30); head2=line(x0,y0,'color','r','linestyle','.','erasemode','xor','marke rsize',50);%设置小球颜色,大小,线条的擦拭方式 t=0;%设置小球的初始值 dt=0.001;%设置运动周期 t1=0;%设置大球的初始值 dt1=0.001; while1%条件表达式 t=t+dt; x1=9-1*t; y1=5; x3=6; y3=5; ift>0 x2=6; y2=5;%设置小球的运动轨迹 end ift>2.8 t=t+dt; a=sin(t-3); x1=6.1; y1=5.1; x3=4-2*sin(1.5*a); y3=5-2*cos(1.5*a);%设置大球的运动轨迹 end
飞机碰撞模型 摘要 第六架在边长为160km的正方形区域内以的飞行角从坐标为(0,0)的点出发,在飞行过程中不与其它五架飞机发生碰撞,即在该区域内与其它任意飞机的距离大于8km,就要不断调整该飞机的飞行角度,使其任意时刻与其他飞机的距离大于8km,利用空间中点的距离定义,计算任意时刻该飞机与其他飞机的距离,找到调整角度的最小值为。 1、问题重述 在约10000km高空的某边长160km的正方形区域内,有5架飞机均以800km/h的速度作水平飞行,不碰撞的标准为在该区域内任意两架飞机的距离大于8km。现有5架飞机在区域内飞行且它们不会碰撞,其初始坐标和飞行方向由下表给出: 现有第6架飞机要进入该区域,坐标为(0,0),飞行角为,如果其与内部的5架飞机发生碰撞,就需要调整其飞行角度,请建立优化模型,确定其与内部5架飞机不碰撞的最小调整角。 2、基本假设 1、五架飞机在规定正方形区域飞行中不随意改变路线; 2、飞机在飞行中不考虑其他未知因素; 3、符号说明 :正方形区域的边长; :第i架飞机飞行的方向角度; :第六架飞机飞行过程中的调整角度; :第架、第架飞机的距离; :第架飞机在区域内飞行的路线长度; :第架飞机的飞行速度; :第架飞机在区域内的飞行时间; :第i架飞机的横坐标; :第i架飞机的纵坐标; 4、模型的建立与求解 1、模型的建立 先根据五架飞机起始点与终点坐标,在规定的网格区域内画出它们的飞行路线,再根据给出的区域长度与各架飞机飞行速度,计算出各架飞机在区域内的飞行时间, 再根据计算得出的时间,得出时刻各架飞机的坐标,求出在该时刻第六架飞机与其他五架飞机的距离 即 当<8时,此时就需要调整第六架飞机的飞行角度,使其与另外五架飞机
随着不确定性研究的深入,越来越多的科学家相信,不确定性是这个世界的魅力所在,只有不确定性本身才是确定的。在众多的不确定性中,随机性和模糊性是最基本的。针对概率论和模糊数学在处理不确定性方面的不足,1995年我国工程院院士李德毅教授在概率论和模糊数学的基础上提出了云的概念,并研究了模糊性和随机性及两者之间的关联性。自李德毅院士等人提出云模型至今,云模型已成功的应用到自然语言处理、数据挖掘、 设是一个普通集合。 , 称为论域。关于论域中的模糊集合,是指对于任意元素都存在一个有稳定倾向的随机数,叫做对的隶属度。如果论域中的元素是简单有序的,则可以看作是基础变量,隶属度在上的分布叫做隶属云;如果论域中的元素不是简单有序的,而根据某个法则,可将映射到另一个有序的论域上,中的一个且只有一个和对应,则为基础变量,隶属度在上的分布叫做隶属云[1] 。 数字特征 云模型表示自然语言中的基元——语言值,用云的数字特征
——期望Ex,熵En和超熵He表示语言值的数学性质[3] 。 期望 Ex:云滴在论域空间分布的期望,是最能够代表定性概念的点,是这个概念量化的最典型样本。 熵 En:“熵”这一概念最初是作为描述热力学的一个状态参量,此后又被引入统计物理学、信息论、复杂系统等,用以度量不确定的程度。在云模型中,熵代表定性概念的可度量粒度,熵越大,通常概念越宏观,也是定性概念不确定性的度量,由概念的随机性和模糊性共同决定。一方面, En是定性概念随机性的度量,反映了能够代表这个定性概念的云滴的离散程度;另一方面,又是定性概念亦此亦彼性的度量,反映了在论域空间可被概念接受的云滴的取值范围。用同一个数字特征来反映随机性和模糊性,也必然反映他们之间的关联性。 超熵 He:熵的不确定性度量,即熵的熵,由熵的随机性和模糊性共同决定。反映了每个数值隶属这个语言值程度的凝聚性,即云滴的凝聚程度。超熵越大,云的离散程度越大,隶属度的随机性也随之增大,云的厚度也越大。 1.绘制云图 Ex=18
clc; clear; fill([6,7,7,6],[5,5,0,0],[0,0.5,0]);%右边竖条的填充 hold on; %保持当前图形及轴系的所有特性 fill([2,6,6,2],[3,3,0,0],[0,0.5,0]);%左边竖条的填充 hold on;% 保持当前图形及轴系的所有特性 t1=0:pi/60:pi; plot(4-2*sin(t1-pi/2),5-2*cos(t1-pi/2));%绘制中间的凹弧图形 grid on;%添加网格线 axis([0,9,0,9]);%定义坐标轴的比例% axis('off');%关闭所有轴标注,标记,背景 fill([1,2,2,1],[5,5,0,0],[0,0.5,0]);%中间长方形的填充 hold on;% 保持当前图形及轴系的所有特性 title('碰撞');%定义图题 x0=6; y0=5; head1=line(x0,y0,'color','r','linestyle','.','erasemode','xor','markersize',30); head2=line(x0,y0,'color','r','linestyle','.','erasemode','xor','markersize',50); %设置小球颜色,大小,线条的擦拭方式 t=0;%设置小球的初始值 dt=0.001;%设置运动周期 t1=0;%设置大球的初始值 dt1=0.001; while 1%条件表达式 t=t+dt; x1=9-1*t; y1=5; x3=6; y3=5; if t>0 x2=6; y2=5;%设置小球的运动轨迹 end if t>2.8 t=t+dt; a=sin(t-3); x1=6.1; y1=5.1; x3=4-2*sin(1.5*a); y3=5-2*cos(1.5*a);%设置大球的运动轨迹
基于MATLAB的地震正演模型实现 贾跃玮 (中国地质大学(北京) 北京100083) 摘 要 人工合成地震正演模型是进行三维模型计算的基础。针对地震勘探的原理,本文运用MATLAB强大数学计算和图像可视化功能,对一个三层介质模型制作了人工合成地震记录。文章首先说明了地震记录形成的物理机制,然后介绍了地质模型的构造及参数选择,最后针对该具体地质模型制作了合成地震记录。 关键词 地震;MATLAB;正演 0引 言 地震勘探就是利用地下介质弹性和密度的差异,通过观测和分析大地对人工激发地震波的响应,推断地下岩层的性质和形态的地球物理方法。地震勘探是钻探前勘测石油与天然气资源的重要手段,在煤田和工程地质勘查、区域地质研究和地壳研究等方面,也得到广泛应用。 人工合成二维地震模型记录是各种复杂地震模型正演计算的基础,是对地震勘探经典理论的忠实实现。在实际工作中,针对具体地质构造进行二维地震模拟能够有效帮助地球物理工作者在地震剖面上识别各种地质现象。MATLAB环境集编程、画图于一体,特别适合人工合成地震记录的快速实现。因此,我们在MATLAB环境下设计了一个三层地质模型,并对该模型模拟了地震记录,旨在可视化地观察地震波场记录特征并验证地震褶积模型。 1地震记录形成的物理机制 在地震记录上看到的波形是地震子波叠加的结果,从地下许多反射界面发生反射时形成的地震子波,振幅大小决定于反射界面反射系数的绝对值,极性的正负决定于反射系数的正负,到达时间的先后取决于界面深度和覆盖层的波速。若地震子波波形用S(t)表示,反射系数是双程垂直反射旅行时t的函数,用R(t)表示,地震记录f(t)形成的物理过程在数学上就可表示为:f(t)=S(t)3R(t)=∫0T S(τ)R(t-τ)dτ 地震子波和反射系数资料常常不易取得,因此计算时常做这样一些假设: (1)地质模型的建立是来自大量观察实际地质结构的经验性归纳总结。 (2)为了模型建立和计算过程中突出理论数值,去除了一些干扰因素,对一切衰减、噪声都不进行考虑。 (3)地层在横向上均匀,纵向上是由大量具有不同弹性性质的薄层构成。 (4)地震子波以平面波形式垂直入射到界面,各薄层的反射子波与地震子波形状相同,只是振幅及极性不同。 (5)所有波的转换、吸收及绕射等能量损失都不考虑。 基于以上这些假设条件进行地震记录合就必须已知地震子波以及地层的反射系数,而反射系数又主要由地层的波阻抗反映,所以必须首先获取地层的速度和密度资料。 速度资料可通过连续速度测井获得,密度资料可从密度测井获得,得不到密度资料时,可近似假定密度不变,以速度曲线代替波阻抗曲线来计算反射系数。加德纳根据实际资料提出了一个由速度推算密度的经验公式: ρ=0.23V0.25 (速度单位:英尺/秒) 或 ρ=0.31V0.25 (速度单位:米/秒)
第6章从云模型理解模糊集合的争论与发展
第1章基于云模型的粒计算方法应用 云模型是一个定性定量转换的双向认知模型,正向高斯云和逆向高斯云算法实现了一个基本概念与数据集合之间的转换关系;本文基于云模型和高斯变换提出的高斯云变换方法给出了一个通用的认知工具,不仅将数据集合转换为不同粒度的概念,而且可以实现不同粒度概念之间的柔性切换,构建泛概念树,解决了粒计算中的变粒度问题,有着广阔的应用前景。 视觉是人类最重要的感觉,人类所感知的外界信息至少有80%以上都来自于视觉[130]。图像分割[131]是一种最基本的计算机视觉技术,是图像分析与理解的基础,一直以来都受到人们的广泛关注。目前图像的分割算法有很多,包括大大小小的改进算法在内不下千种,但大致可以归纳为两类[132]。第一类是采用自顶向下的方式,从数学模型的选择入手,依靠先验知识假定图像中的部分属性特征符合某一模型,例如马尔科夫随机场、引力场等,利用模型描述图像的邻域相关关系,将图像低层的原始属性转换到高层的模型特征空间,进而建模优化求解所采用模型的参数,通常是一个复杂度非常高的非线性能量优化问题。在特征空间对图像建模,其描述具有结构性、分割结果也一般具有语义特征,但是由于对数据的未知性、缺乏足够先验知识的指导,导致模型的参数选择存在一定的困难。第二类是采用自底向上的方式,从底层原始数据入手,针对图像灰度、颜色等属性采用数据聚类的方法进行图像分割,聚类所采用的理论方法通常包括高斯变换、模糊集、粗糙集等;或者预先假设图像的统计特性符合一定的分类准则,通过优化准则产生分割结果,例如Otsu方法的最大方差准则[133][134]、Kapur方法的最大熵准则[135][136]等。这类方法虽然缺乏语义信息表达,但是直接在数据空间建模,方法更具普适性和鲁棒性。 随着计算机视觉研究的深入,简单的图像分割已经不能满足个性化的需求,有时候人们恰恰兴趣的是图像中亦此亦彼的那些不确定性区域,基于云模型的粒计算方法是一种不确定性计算方法,发现图像中存在的不确定性区域是它的一个重要能力。如何模拟人类自然视觉中的认知能力进行图像分割一直以来都是一个难点问题,而基于高斯云变换的可变粒计算正是用来模拟人类认知中的可变粒计算过程,因此可以利用高斯云变换对自然视觉认知能力中选择性注意能力进行形式化。武汉大学秦昆教授等曾基于云综合、云分解等云运算实现图像分割,正如第5章中的分析结果,基于内涵的概念计算方法随着层次的提升,概念脱离原始数据会增加误分率,甚至失效,而且无法实现自适应地概念数量和粒度优化。
Matlab设计实验 课题名称:完全弹性碰撞 一.设计背景: 完全弹性碰撞(Perfect Elastic Collision):在理想情况下,完全弹性碰撞的物理过程满足动量守恒和能量守恒。如果两个碰撞小球的质量相等,联立动量守恒和能量守恒方程时可解得:两个小球碰撞后交换速度。如果被碰撞的小球原来静止,则碰撞后该小球具有了与碰撞小球一样大小的速度,而碰撞小球则停止。多个小球碰撞时可以进行类似的分析。 二.设计意义 真实情况下,由于小球间的碰撞并非理想的弹性碰撞,还会有能量的损失,所以最后小球还是要停下来。 所以该设计主要用于研究能量守恒中的某些问题。还有就是用于实验演示。三.程序设计 该程序主要设置了三个不同颜色的小球,在真空环境下(理想环境下)的碰撞实验演示。 该程序可以通过改变各种参数,研究各种情况下的实验数据。 程序: pole=1.8;%定义摆线的长度 xmax=2;%定义横坐标长度 ymax=2;%定义纵坐标长度 basew=2.3;%定义图中方框的宽度 baseh=2.3;%定义图中方框的高度 instant=0.2;%定义摆线间距 %三视图的初始设置 %第一幅图
figure('name','理想情况下能量守恒定律 1','position',[500,340,440,320]);%定义第一幅图的标题和位置 fill([xmax,xmax,-xmax,-xmax,xmax,xmax-0.05,xmax-0.05,- xmax+0.05,-xmax+0.05,xmax-0.05],[ymax,-ymax,- ymax,ymax,ymax,ymax-0.05,-ymax+0.05,-ymax+0.05,ymax- 0.05,ymax-0.05],[0,1,1]); %填充底座背景 hold on;%保持当前图形及坐标所有特性 fill([xmax-0.05,xmax-0.05,-xmax+0.05,-xmax+0.05],[ymax- 0.5 ,ymax-0.55,ymax-0.55,ymax-0.5],'g');%填充方框内横杆背景 hold on;%保持当前图形及坐标所有特性 text(-0.25,1.7,'1');text(0,1.7,'2');text(0.25,1.7,'3');%在坐标处标识 说明文字 text( -1.0,1.7,'a');text( -1.0,-1.7,'b');%在坐标处标识说明文字 text(1.0,1.7,'真空容器');text(-1.8,1.7,'主视图');%在坐标处标识说明文 字 axis([-basew,basew,-baseh,baseh]);%定义背景坐标范围在x(-2.3~2.3) Y(-2.3~2.3)之间 %axis('off');%覆盖坐标刻度并填充背景 theta0=7 *pi/6;%摆线1的初始角度 x0=pole*cos(theta0);%摆线1末端x坐标 y0=pole*sin(theta0)+1.5;%摆线1末端y坐标 body1=line([-instant,x0-instant],[1.5,y0],'color','r','linestyle','- ','erasemode','xor');%设置摆线1 head1=line(x0- instant,y0,'color','r','linestyle','.','erasemode','xor','markersize',40);%设置第一个小球颜色,大小 theta1=3*pi/2;%摆线2,3的角度 x1=pole*cos(theta1);%摆线2,3末端x坐标 y1=pole*sin(theta1)+1.5;%摆线2,3末端y坐标 body=line([-0.001,x1],[1.5,y1],'color','k','linestyle','- ','erasemode','xor');%设置摆线2
实验四 用MATLAB 求解状态空间模型 1、实验设备 MATLAB 软件 2、实验目的 ① 学习线性定常连续系统的状态空间模型求解、掌握MATLAB 中关于求解该模型的主要函数; ② 通过编程、上机调试,进行求解。 3、实验原理说明 Matlab 提供了非常丰富的线性定常连续系统的状态空间模型求解(即系统运动轨迹的计算)的功能,主要的函数有: 初始状态响应函数initial()、阶跃响应函数step()以及可计算任意输入的系统响应数值计算函数lsim()和符号计算函数sym_lsim()。 数值计算问题可由基本的Matlab 函数完成,符号计算问题则需要用到Matlab 的符号工具箱。 4、实验步骤 ① 根据所给状态空间模型,依据线性定常连续系统状态方程的解理论,采用MATLAB 编程。 ② 在MATLAB 界面下调试程序,并检查是否运行正确。 习题1:试在Matlab 中计算如下系统在[0,5s]的初始状态响应,并求解初始状态响应表达式。 Matlab 程序如下: A=[0 1; -2 -3]; B=[]; C=[]; D=[]; x0=[1; 2]; sys=ss(A,B,C,D); [y,t,x]=initial(sys,x0,0:5); plot(t,x) 0011232????==????--????x x x
习题2:试在Matlab 中计算如下系统在[0,10s]内周期为3s 的单位方波输入下的状态响应。并计算该系统的单位阶跃状态响应表达式。 Matlab 程序如下: A=[0 1; -2 -3]; B=[0; 1]; C=[]; D=[]; x0=[1; 2]; sys=ss(A,B,C,D); [u t]=gensig('square',3,10,0.1) 0011232????==????--???? x x x
正向云发生器matlab代码 %正向云算法:由数字特征到定量数据表示 %直接在程序中固定EX/EN/HE的值 Ex=0; En=1; He=0.2; n=2000; X = zeros(1,n); %产生一个1*n型矩阵,其元素都为0 Y = zeros(1,n); X= normrnd ( En, He, 1, n); %产生一个1*n型正态随机数矩阵,EX为期望,ENN为方差for i=1:n Enn=X(1,i); X(1, i) = normrnd ( Ex, Enn, 1) ; %产生一个正态随机数,EX为期望,ENN为方差(1*1型) Y(1, i) = exp ( - (X(1, i) - Ex) ^2 / (2* Enn^2) ) ; end plot(X(1,:),Y(1,:),'r.'); %画图语句 %倘若X(1,i)是确定的随机数时,本代码是自己输入确定值 %保存为.m文件时,文件名要是字母名,不要中文名 disp('- - - - -云发生器程序开始- - - - -'); Ex = input('输入期望值Ex:'); En = input('输入熵值En:'); He = input('输入超熵值He:'); n = input('输入需重复计算次数:'); X = zeros(1,n); %产生一个1*n型矩阵,其元素都为0 Y = zeros(1,n); X= normrnd ( En, He, 1, n); %产生一个1*n型正态随机数矩阵,EX为期望,He为方差Xi = input('输入随机数X(1,i):'); %手动输入固定随机数X for i=1:n
一维云模型 程序: clc clear Ex=170;En=5;He=0.5; n=5000; for i=1:n Enn=randn(1)*He+En; x(i)=randn(1)*Enn+Ex; y(i)=exp(-(x(i)-Ex)^2/(2*Enn^2)); end plot(x,y,'.r') title('5000个男生身高的一维云图') ylabel('确定度'); xlabel('身高值'); axis([150,190,0,1]) grid on 一维: clear vars;clc;close all; Ex1=-8; En1=0.7; He1=0.2; n1=200; Ex2=2.2; En2=2; He2=0.5; n2=800; Ex3=18; En3=4; He3=0.7; n3=1500; En1_t = normrnd(En1,He1,n1,1); data1 = normrnd(Ex1,En1_t,n1,1);
mu1 = exp(-0.5*((data1-Ex1)./En1_t).^2); En2_t = normrnd(En2,He2,n2,1); data2 = normrnd(Ex2,En2_t,n2,1); mu2 = exp(-0.5*((data2-Ex2)./En2_t).^2); En3_t = normrnd(En3,He3,n3,1); data3 = normrnd(Ex3,En3_t,n3,1); mu3 = exp(-0.5*((data3-Ex3)./En3_t).^2); figure(1); plot(data1,mu1,'.b',data2,mu2,'*r',data3,mu3,'+k'); axis equal; 二维云模型 程序: clc clear Ex1=170;En1=5;He1=0.5; Ex2=65;En2=3;He2=0.2; n=5000; for i=1:n
% ch2example1prg1.m dt=1e-4; % 仿真采样间隔 T=3*1e-3; % 仿真终止时间 t=0:dt:T; input=2*cos(2*pi*1000*t); % 输入被调信号 carrier=5*cos(2*pi*1e4*t); % 载波 output=(2+0.5*input).*carrier; % 调制输出 % 作图: 观察输入信号, 载波, 以及调制输出 subplot(3,1,1); plot(t,input,'LineWidth',3);xlabel('时间 t');ylabel('被调信号'); subplot(3,1,2); plot(t,carrier,'LineWidth',3);xlabel('时间t');ylabel('载波'); subplot(3,1,3); plot(t,output,'LineWidth',3);xlabel('时间t');ylabel('调幅输出'); % ch2example1prg2.m clear; % 清空内存变量,以避免以往运行的结果影响本程序 dt=1e-5; % 仿真采样间隔 T=3*1e-3; % 仿真终止时间 t=0:dt:T; for k=1:length(t) % 基于时间流的仿真计算 input(k)=2*cos(2*pi*1000*t(k)); % 第k个仿真步进时的输入被调信号 carrier(k)=5*cos(2*pi*1e4*t(k)); % 第k个仿真步进时的载波output(k)=(2+0.5*input(k)).*carrier(k);% 第k个仿真步进时的调制输出end % 作图: 观察输入信号, 载波, 以及调制输出 subplot(3,1,1); plot(t,input,'LineWidth',3);xlabel('时间 t');ylabel('被调信号'); subplot(3,1,2); plot(t,carrier,'LineWidth',3);xlabel('时间t');ylabel('载波'); subplot(3,1,3); plot(t,output,'LineWidth',3);xlabel('时间t');ylabel('调幅输出'); % ch2example1prg3.m dt=1e-6; % 仿真采样间隔 T=2*1e-3; % 仿真的帧周期 for N=0:500 % 总共仿真的帧数 t=N*T+(0:dt:T); % 帧中的取样时刻 input=2*cos(2*pi*1005*t); % 输入被调信号 carrier=5*cos(2*pi*(1e4)*t+0.1*randn); % 载波 output=(2+0.5*input).*carrier; % 调制输出
灰色系统预测GM(1,1)模型及其Matlab 实现 预备知识 (1)灰色系统 白色系统是指系统内部特征是完全已知的;黑色系统是指系统内部信息完全未知的;而灰色系统是介于白色系统和黑色系统之间的一种系统,灰色系统其内部一部分信息已知,另一部分信息未知或不确定。 (2)灰色预测 灰色预测,是指对系统行为特征值的发展变化进行的预测,对既含有已知信息又含有不确定信息的系统进行的预测,也就是对在一定范围内变化的、与时间序列有关的灰过程进行 预测。尽管灰过程中所显示的现象是随机的、杂乱无章的,但毕竟是有序的、有界的,因此得到的数据集合具备潜在的规律。灰色预测是利用这种规律建立灰色模型对灰色系统进行预测。 目前使用最广泛的灰色预测模型就是关于数列预测的一个变量、一阶微分的GM(1,1)模型。它是基于随机的原始时间序列,经按时间累加后所形成的新的时间序列呈现的规律可用一阶线性微分方程的解来逼近。经证明,经一阶线性微分方程的解逼近所揭示的原始时间序列呈指数变化规律。因此,当原始时间序列隐含着指数变化规律时,灰色模型GM(1,1)的预测是非常成功的。 1 灰色系统的模型GM(1,1) 1.1 GM(1,1)的一般形式 设有变量X (0)={X (0)(i),i=1,2,...,n}为某一预测对象的非负单调原始数据列,为建立灰色预测模型:首先对X (0)进行一次累加(1—AGO, Acumulated Generating Operator)生成一次累加序列: X (1)={X (1)(k ),k =1,2,…,n} 其中 X (1) (k )= ∑ =k i 1 X (0)(i) =X (1)(k -1)+ X (0)(k ) (1) 对X (1)可建立下述白化形式的微分方程: dt dX )1(十) 1(aX =u (2) 即GM(1,1)模型。 上述白化微分方程的解为(离散响应): ∧ X (1)(k +1)=(X (0)(1)- a u )ak e -+a u (3) 或 ∧ X (1)(k )=(X (0)(1)- a u ))1(--k a e +a u (4)
现代控制理论第一次上机实验报告 实验三 利用MATLAB 求取状态空间模型的相似变换及其标准型、 控制系统的不同状态模型实现 实验目的: 1、通过实验掌握线性系统的对角线标准型、约旦标准型、模态标准型以及伴随矩阵标准型的表示及相应变换阵的求解; 2、通过编程、上机调试,掌握系统可控性和可观测性的判别方法、系统的可控性和可观测性分解等; 3、加深理解由控制系统传递函数建立能控、能观、约当标准型等不同状态模型的方法。 实验要求: 1.实现同一系统传递函数的状态模型是唯一的吗? 2.系统传递函数除上面三种不同状态模型实现外,常见的还有串连实现,对否? 3.对于上述系统传递函数,其输出稳态值与输入阶跃信号幅值有何关系? 实验步骤: 1. 根据所给系统的已知条件(可自行参阅选择刘豹教材中的例题或习题),如传递函数、零极点模型或(A 、B 、C 、D ),实现状态空间模型之间的相似变换、写出其对角线标准型、约当标准型、模态标准型以及伴随矩阵标准型的表示及求解相应变换阵,采用MATLAB 的相关函数编写m-文件。 已知系统的传递函数如下: 3211()(1)( 2.5)(5)8.52012.5160.270.11 2.55 G s s s s s s s s s s ==++++++-=+++++ 运行如下m-文件,得到传递函数的状态空间模型: num=[0 0 0 1]; den=[1 8.5 20 12.5]; [A,B,C,D]=tf2ss(num,den) 得到 A = -8.5000 -20.0000 -12.5000 1.0000 0 0 0 1.0000 0 B = 1 C =
环境建模 机器人的采摘环境,根据机械手末端识别技术,将识别的树叶,树枝等障碍物栅格化,不足一格的近似为一格,建立二维环境模型。采摘环境的建立:建立环境地图的方法主要有栅格法、自由空间法、广义锥法、链接图法、几何信息法等。【基于蚁群算法的移动机器人路径规划技术的研究刘杰闫清东】 3.1.1 可视图法 可视图法将环境中的任意障碍物描述成不规则多边形,机器人或者机械手描述为一个质点,并把起始点、目标点以及障碍物简化成的不规则多边形的顶点连接起来,同时去除和障碍物相交的直线,那么剩下的直线都是与障碍物无碰的,机器人在这些直线上选择路径就不会与障碍物发生碰撞,要搜索避障路径,只需要在这些直线上通过一些搜索算法确定路径点即可。但是,随着起始点和目标点位置的改变,可视图法就必须根据环境来重新定义,这样增加了计算量,降低了灵活性。 3.1.2 自由空间法 在自由空间中一般采用凸区法、三角形法、广义锥法等描述障碍物,并构造连通图进行路径规划。首先,它把环境空间中的障碍物简单描述成自由空间中的不规则多边形,然后,利用某些图论方法建立连通图,最后在建立好的连通图上搜索合适的路径点以至形成一条可行走的路径。这种方法优点是在确定工作环境空间以后,无论起始点和目标点的位置怎么改变,环境模型也不需要重新建立,其缺点是随着障碍物增加,算法的计算时间几何级变长,而且往往搜索到的路径都不是最优的。同时,自由空间法一般应用于二维平面空间中进行路径规划,在三维空间中很难建立环境模型,如果非要应用到三维空间中,计算量将是二维空间的无数倍。 3.2 栅格法 栅格法建立环境地图的原理是M.B.Metea首先提出的,在平面而为坐标中,用0
1.在隧道内放置多个地感线圈(间距相同),车辆通过时、对通过的相邻两个线圈(或单线圈)的脉冲信号数据进行实时采集,首先利用云模型算法(正向云与逆向云算法结合)或其他,计算得到车速的估计值,将车速估计结果与行车时间作为车辆行驶位置判定的依据,再采用云推理得到车辆行驶位置的估计值,对所估计的结果验证,实现对车辆位置的实时精确估计。 2.最后还想验证一下估计结果的准确度 3.做一下参数寻优,对比结果 4.补充要求:我想用脉冲频率波形数据哦,因为有个原始波形的图更好的。。 (我当时说给你一篇论文,用那个上面的数据。。不知道能不能用。。。见附带的论文) 二、课题解决思路简介 基于"隧道内放置多个地感线圈",主要是汽车通过多个线圈,产生不同时刻的脉冲,然后计算每个脉冲之间的时间差,来获得车速的计算。 这里,我们主要需要的数据时每个线圈之间的距离参数以及每个脉冲之间的时间间隔,然后我们通过云模型来算法得到车速的估计值。根据得到的车速,我们可以得到最后的位置。 然后,我们可以根据论文最后一章的分析方法来分析最后结果的准确度。 对于参数优化,主要是针对云模型的初始参数,我们使用随机数,然后通过PSO进行迭代优化,从而获得最佳的参数,并估算得到最佳的值。 最后,将普通算法得到的结果和PSO优化之后的结果进行对比,从而验证优化算法的优势。 最后,你需要的是脉冲频率波形,这个,我们在设计的时候,进行处理,可以保证。 三、课题设计介绍和仿真说明 3.1正向云和逆向云 首先介绍一下基本的云模型,正向云和逆向云,其基本的理论如下所示: 云模型的发生器就是指云的生成算法,发生器的形式可以有很多种,一般都采用软件的形式加以实现。云的发生器大体上可以分为正向云发生器和逆向云发生器。正向发生器是指从定性到定量之间的转换模型,即由云的三个数字特征产生云滴的具体过程。图1为正向云模型发生器示意图。