汽车CAN总线的现状和发展
摘要:控制器局域网(CAN)是一种有效支持分布式控制或实时控制的现场总线,具有高性能和高可靠性的特点;随着现代汽车技术的发展,CAN技术在汽车电子领域应用日益广泛。文章介绍了符合CAN2.0B协议汽车CAN系统设计方案,着重讨论了以微处理器P89C668为核心的CAN总线智能节点的软硬件实现,推荐一款MOTOROLA的多路开关检测芯片MC33993,并且涉及到,SPI以及在系统编程等技术。
关键词:现场总线,CAN,汽车电子
Summary:The Controller Area Network (CAN) is an effective support for real-time control of distributed control or fieldbus with high performance and high reliability characteristics; With the development of modern automotive technology, CAN technology in the field of automotive electronics is used widely . This paper introduces meet CAN2.0B agreement automotive CAN system design, focused on the core microprocessor P89C668 CAN bus intelligent node hardware and software implementation, recommend a multi-way switch MOTOROLA detection chip MC33993, and relate to, SPI as well as in-system programming techniques。
Keywords: Fieldbus, CAN, automotive electronics
(Engineering College, South China Agricultural University, Guangzhou 510642)
引言:汽车总线是指汽车内部导线采用总线控制的一种技术,通常叫汽车总线或汽车总线技术。随着电子技术的迅速发展和在汽车上的广泛应用,汽车电子化程度越来越高。从发动机控制到传动系控制,从行驶、制动、转向系控制到安全保证系统以及仪表报警系统渐渐形成了一个复杂的大系统。
目前总线的种类很多,如CAN总线,LIN总线,VAN总线(法国车系专用),IDB-M,MOST,USB 和 IEEE1394等。控制器局域网(CAN)是一种有效支持分布式控制或实时控制的现场总线,具有高性能和高可靠性的特点;随着现代汽车技术的发展,CAN技术在汽车电子领域应用日益广泛。
1CAN总线技术简介
CAN总线又称作汽车总线,全称“控制器局域网(CAN—Controller Area Network)”。CAN 总线是一种现场总线(区别于办公室总线),是德国Bosch公司为解决现代汽车中众多的控制与测试仪器之间的数据交换而开发的一种串行数据通信协议。它是一种多主总线,通信介质可以是双绞线、同轴电缆或光导纤维,通信速率可达1Mbps,距离可达10km。CAN数据总线可以比作公共汽车。公共汽车可以运输大量乘客,CAN数据总线包含大量的数据信息。
2CAN协议的特点
CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码,使网络内的节点个数在理论上不受限制。由于CAN总线具有较强的纠错能力,支持差分收发,因而适合高干扰环境,并具有较远的传输距离。目前汽车上的网络连接方式主要采用2条CAN,一条用于驱动系统的高速CAN,速率达到500kb/s;另一条用于车身系统的低速CAN,速率是100kb/s。车身系统CAN 主要连接和控制的汽车内外部照明、灯光信号、雨刮电机等电器。
3高、低速CAN总线的关系
驱动系统CAN和车身系统CAN这两条独立的总线之间设计有"网关",以实现在各个CAN之间的资源共享,并将各个数据总线的信息反馈到仪表板上。驾车者只要看看仪表板,就可以知道各个电控装置是否正常工作了。
4CAN总线有如下基本特点:
◎废除传统的站地址编码,代之以对通信数据块进行编码,可以多主方式工作;
◎采用非破坏性仲裁技术,当两个节点同时向网络上传送数据时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响继续传输数据,有效避免了总线冲突;
◎采用短帧结构,每一帧的有效字节数为8个,数据传输时间短,受干扰的概率低,重新发送的时间短;
◎每帧数据都有CRC校验及其他检错措施,保证了数据传输的高可靠性,适于在高干扰环境下使用;
◎节点在错误严重的情况下,具有自动关闭总线的功能,切断它与总线的联系,以使总线上其他操作不受影响;
◎可以点对点,一对多及广播集中方式传送和接受数据。
现代汽车典型的控制单元有电控燃油喷射系统,电控传动系统,防抱死制动系统(ABS),防滑控制系统(ASR),废气再循环系统,巡航系统和空调系统,车身电子控制系统(包括照明指示和车窗,刮雨器等)。
5CAN总线有如下基本特点:
◎接口电路:
采用技术成熟应用广泛的SJA1000(CAN控制器),6N137(光电隔离),P82C250(CAN收发器)组成接口电路。需要指出的是,CAN总线(CANH,CANL)两端务必跨接120欧的终端电阻。SJA1000中断引脚接CPU的外中断0引脚。替代MAX232,其匹配电容只需103瓷片电容。串行数据通讯波特率可达38400bps。
晶振和复位电路:
外接一块工业级的12M振荡芯片作为时钟信号。复位电路采用X25045芯片进行智能控制。
X25045芯片将看门狗定时器,电源监控电路和
E2PROM功能合三为一。看门狗定时器功能在系统出错期间,经过一个可设置的时间间隔就置位RESET 信号。电源监控电路能检测到欠电压状况,在VCC 下降到限阀值以下,系统被复位。并且RESET信号在VCC恢复且稳定之前一直有效。存储器功能的
X25405是CMOS的4096字的E2PROM.并且支持SPI 协议的三线(SO,SI,SCLK)存取。本节点用到X25405的前两个功能构成可靠的复位电路。
开关/数字量,模拟量检测电路:
汽车节点的开关器件(信号灯,雨刮,面板,车窗玻璃,电动后视镜等等的开关)特别复杂和繁多,而电流检测,水温油位传感器信号都是非线性的模拟信号,所以可靠实时地对这些开关/模拟量进行检测成为汽车电子硬件必须解决的问题。传统的分立元件保持电路存在可靠性差,尤其是开关触点氧化严重,浪费大量的微处理器I/O口等问题,推荐采用MOTOROLA公司的多路开关检测芯片
MC33993。其突出优点如下:
◎ 3.3/5.0V的SPI序列读写(SO,SI,SCLK);
◎ 8路可编程开关输入检测(接地或接电源),14路接地开关输入检测,每路开关状态改变均能够产生中断;
◎开关输入电压从-14V~Vpwr(工作电源),Vpwr 最大可达40V;
◎开关状态改变时的可选择唤醒;
◎可选择的湿性电流(16mA或2mA);
◎ 22对1的模拟量输出;
◎ Vpwr的低功耗电流(standby current)小于
100uA,VDD的低功耗电流(standby current)小于10uA。
◎汽车计算机控制
◎汽车计算机控制是指汽车中借助微处理器实现的控制,是汽车、机电、计算机、控制、传感器、执行器、网络等方面理论与技术的高度结合。
◎汽车计算机控制系统:
◎汽车中以计算机作为控制与管理核心并能够实现特定功能的系统称为汽车计算机控制系统。
◎一般汽车计算机控制系统分为:动力、安全性、舒适性、通讯和多媒体四个集合。
◎控制系统基本功能
◎汽车计算机控制系统的基本功能是信息和能量的传递、加工和比较,并根据信息改变控制系统的状态,达到预期的控制目标。
6CAN总线有如下基本特点:
本设计所需实现的功能是各节点发送接收数据,网关能实现数据的转换,实现高、低速网络之间的通信。在实验过程中,假设速率不同的两个网络,数据刷新周期分别为10 ms的低速网和5 ms
的高速网。软件设计由KEIL C编写,主程序完成
数据的处理和收发,中断程序负责数据的采集,主程序由CAN总线数据的收发、液晶显示控制、数据帧解析三部分构成。通过中断判断数据的接收或发送,根据高、低速的不同,每隔一段时间(5 ms或10 ms)发送一组新数据。CAN总线有如下基本特
7总结
CAN总线CAN网络通信系统软件以其高性能,高可靠性及独特的设计,受到工业控制领域和汽车电子领域的广泛重视,已被公认为最有前途的现场总线之一。我们深信不久的将来,国产的CAN总线汽车必将诞生。
[参考文献]
[1] 张国旺. 虚拟仪器技术在机械工程领域中的
应用[J]. 机电信息. 2012(06)
[1] 于洁,坎杂,张若宇,邵鲁浩.虚拟仪器技术在
我国农产品生产加工中的应用[J]. 江苏农业科学. 2011(02)
[2] 张国辉,谢小鹏,陈建明.虚拟实验设计平台的
开发及应用[J]. 机床与液压. 2009(11)
[2] 王霞.虚拟仪器的发展过程及应用[J]. 机械
研究与应用. 2009(04)
[2] 刘萍,曹慧,邱鹏.虚拟仪器的发展过程及应用[J]. 山东科学. 2009(01)
[2] 孙建芳,张国辉一种虚拟实验系统的设计方法
及应用[J]. 液压气动与密封. 2008(02)
[3] 赵高毅. 通用串行总线在虚拟仪器技术中的
应用研究[J]. 遵义师范学院学报. 2008(01) [3] 俞斌,贾雅琼.一种分布式电机性能测试系统
研究[J]. 江苏电器. 2008(01)
[3] 王春生,高振国.虚拟仪器技术在船舶横摇角
测试系统中的应用[J]. 仪器仪表用户. 2007(03)
[4] 刘保生,赵会兵.基于虚拟仪器技术的轨道信
号实时分析仪研究[J]. 电子测量技术. 2007(02)
一文看懂汽车CAN总线技术原理 随着现代汽车技术的不断发展,CAN总线逐渐成为现代汽车上不可缺少的技术,并大大推动了汽车技术的高速发展。本文将对汽车CAN 总线技术的工作原理、特点及优点,CAN总线在汽车制造中的应用及发展趋势做了简单介绍,具体的跟随小编一起来了解一下。 CAN总线的由来由于现代汽车的技术水平大幅提高,要求能对更多的汽车运行参数进行控制,因而汽车控制器的数量在不断的上升,从开始的几个发展到几十个以至于上百个控制单元。控制单元数量的增加,使得它们互相之间的信息交换也越来越密集。为此德国BOSCH 公司(和inter 公司共同)开发了一种设计先进的解决方案-CAN 数据总线,提供一种特殊的局域网来为汽车的控制器之间进行数据交换。 CAN 是ControllerAreaNetwork 的缩写,称为控制单元的局域网,它是车用控制单元传输信息的一种传送形式。 CAN总线技术简介CAN总线又称作汽车总线,全称为“控制器局域网(Controller Area Network)”,意思是区域网络控制器,它将各个单一的控制单元以某种形式(多为星形)连接起来,形成一个完整的系统。在该系统中,各控制单元都以相同的规则进行数据传输交换和共享,称为数据传输协议。CAN总线最早是德国Bosch公司为解决现代汽车中众多的电控模块(ECU)之间的数据交换而开发的一种串行通讯协议。 在工程实际中CAN总线是对汽车中标准的串行数据传输系统的习惯叫法。随着车用电气设备越来越多,从发动机控制到传动系统控制,从行驶、制动、转向系统控制到安全保证系统及仪表报警系统,使汽车电子系统形成一个复杂的大系统,并且都集中在驾驶室控制。另外,随着近年来智能运输系统(ITS)的发展,以3G(GPS、GIS和GSM)为代表的新型电子通讯产品的出现,它对汽车的综合布线和信息的共享交互提出了更高的要求。CAN 总线正是为满足这些要求而设计的。 CAN总线主要有四部分组成:导线、控制器、收发器和终端电阻。其中导线为由两根普通铜导线绞在一起的双绞线。控制器的作用是对收到和发送的信号进行翻译。收发器负责
汽车CAN总线基本原理
1、CAN总线简介 2、CAN总线通信模式 3、CAN总线的性能特点 4、CAN总线应用实例
1、CAN总线简介 控制器局域网络(Controller Area Network简称CAN)主要用于各种过程(设备)监测及控制。CAN最初是由德国的Bosch公司为汽车的监测与控制设计的,但由于CAN总线本身的突出特点,其应用领域目前已不再局限于汽车行业,而向过程工业、机械工业、机器人、数控机床、医疗器械及传感器等领域发展。由于其高性能、高可靠性及独特的设计,CAN 总线越来越受到人们的重视,国际上已经有很多大公司的产品采用了这一技术。CAN已经形成国际标准(ISO11898),并已成为工业数据通信的主流技术之一。
第一,“载波监测,多主掌控/冲突避免 这就允许在总线上的任一设备有同等的机会取得总线的控制权来向外发送信息。如果在同一时刻有两个以上的设备欲发送信息,就会发生数据冲突,CAN总线能够实时地检测这些冲突情况并作出相应的仲裁而不会破坏待传之信息; 第二,信息报文在传送时不是基于目的站点地址; 这就允许不同的信息以“广播”的形式发送到所有节点并且可在不改变信息格式的前提下对报文进行不同配置; 第三,CAN总线是一种高速的,具备复杂的错误检测和恢复能力的高可靠性强有力的网络。
一、CSMA/CD—载波监测,多主掌控/冲突避免 “载波监测”的意思是指在总线上的每个节点在发送信息报文前都必须监测到总线上有一段时间的空闲状态。 “多主掌控”的意思是一旦此一空闲状态被监测到,那么每个节点都有均等的机会来发送报文。 “冲突避免”是指在两上节点同时发送信息时,节点本身首先会检测到出现冲突,然后采取相应的措施来解决这一冲突情况。此时优先级高的报文先发送,低优先级的报文发送会暂停。在CAN总线协议中是通过一种非破坏性的仲裁方式来实现冲突检测。这也就意味着当总线出现发送冲突时,通过仲裁后原发送信息不会受到任何影响。所有的仲裁判别都不会破坏优先级高的报文信息内容,也不会对其发送产生任何的时延。
论文 汽车CAN总线系统简介
摘要 CAN(Controller Area Network)即控制器局域网,是德国Bosch公司20世纪80年代最初动机是为了解决现代汽车中庞大的电子控制装置之间的通讯,减少不断增加的信号线而应用开发的一种通信协议。因其良好的性能价格比和可靠性,如今已得到广泛应用。传输速率为83.3~500kbit/s。 LIN总线:是车内最新且运用最广泛的低成本串行通讯系统。开发这种是为了产生一种开放的标准“低成本”CAN,用在CAN难于实现或使用成本过高的位置。使用LIN后,无需增加CAN的带宽和灵活性,即可实现与智能传感器和执行器之间的通信。通信协议和数据格式均基于单主/多从概念。LIN总线在物理上基于单线制12V总线。通过LIN启动的典型部件包括车门模块(电动车窗、车门锁、后视镜调节),滑动天窗,转向盘上的控制按钮(收音机、电话……),座椅控制器,风挡玻璃雨刮器,照明,雨水/光线传感器,起动机,发电机等等。LIN 总线是一条双向单线接口,最大传输速率为20kbit/s。 与一般的通信总线相比,CAN总线的数据通信具有突出的可靠性、实时性和灵活性,它在汽车领域上的应用最为广泛,世界上一些著名的汽车制造厂商都采用了CAN总线来实现汽车内部控制系统与各检测和执行机构间的数据通信。
绪论 我在汽车销售服务有限公司进行售后维修实习。在来这九个多月的时间里,首先我对汽车4S店的零部件供给、售后服务流程有了相关了解,其次学会了维修设备:举升机、轮胎动平衡机、部分专用工具等的使用,还有掌握了对检测仪器:DAS电脑检测仪、电池测试仪、万用表等的一般使用,以及对车间信息系统软件能熟练运用。 实习期间我主要从事汽车保养工作。汽车保养是很重要的,买的一辆新车,首先要懂得如何保养。汽车保养需求做的几项任务:干净汽车表面,检查门窗玻璃、刮水器、室内镜、后视镜、门锁与升降器手摇柄能否完全有效。检查散热器的水量、曲轴箱内的机油量、油箱内的燃油储量、蓄电池内的电解液液面高度能否符合请求。检查喇叭、灯光能否完全、有效,安装能否结实。检查转向机构各连接部位能否松旷,安装能否结实。检查轮胎气压能否充足,并肃清胎间及胎纹间杂物。检查转向盘的游动间隙能否符合标准;轮毂轴承、转向节主销能否松动。 汽车保养除了换机油外,还要用电脑检测仪检查车各个电控部件能否正常。检查发动机机油液位,发动机冷冻液液位,助力转向油液位,刹车油油位和轮胎气压。谈到轮胎气压,很多车主看到车轮很扁,以为气压不足,而给汽车车胎打气,直至不扁。实际上这是错的。太高的轮胎气压,造成轮胎过早磨损,在高速公路行驶时,简单发作爆胎,非常风险。轮胎气压太低也不好,最好按各车的标准,可查随车手册或油箱盖上的说明标签。
CAN总线的工作原理 控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的 现场总线之一。CAN 协议由德国的Robert Bosch 公司开发,用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。该协议的健壮性使其用 途延伸到其他自动化和工业应用。CAN 协议的特性包括完整性的串行数据通讯、提供实时支持、传输速率高达1Mb/s、同时具有11 位的寻址以及检错能力。CAN 总线是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电子干扰性,并且能够检测出产生的任何错误。CAN 总线可以应用于汽车电控制系统、电梯控制系统、安全监测系统、医疗仪器、纺织机械、船舶运输 等领域。CAN 总线的特点1、具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点;2、采用双线串行通信方式,检错能力强,可在高噪声干 扰环境中工作;3、具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到CAN-bus 上,形成多主机局部网络;4、可根据报文的ID 决定接收或屏蔽该报文;5、可靠的错误处理和检错机制;6、发送的信息遭到破坏后,可自动 重发;7、节点在错误严重的情况下具有自动退出总线的功能;8、报文不包含 源地址或目标地址,仅用标志符来指示功能信息、优先级信息。CAN 总线的工作原理CAN 总线使用串行数据传输方式,可以1Mb/s 的速率在40m 的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。CAN 与I2C 总线的许多细节很类似,但也有一些明显的区别。当CAN 总线上 的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。对每个节 点来说,无论数据是否是发给自己的,都对其进行接收。每组报文开头的11 位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方
一、概述 对于一般控制,设备间连锁可以通过串行网络完成。因此,BOSCH公司开发了CAN总线(Controller Area Network),并已取得国际标准化组织认证 (ISO11898),其总线结构可参照I SO/OSI参考模型。同时,国际上一些大的半导体厂商也积极开发出支持CAN总线的专用芯片。通过CAN总线,传感器、控制器和执行器由串行数据线连接起来。它不仅仅是将电缆按树形结构连接起来,其通信协议相当于ISO/OSI参考模型中的数据链路层,网络可根据协议探测和纠正数据传输过程中因电磁干扰而产生的数据错误。CAN网络的配制比较容易,允许任何站之间直接进行通信,而无需将所有数据全部汇总到主计算机后再行处理。 二、CAN在国外的发展 对机动车辆总线和对现场总线的需求有许多相似之处,即较低的成本、较高的实时处理能力和在恶劣的强电磁干扰环境下可靠的工作。奔驰S型轿车上采用的就是CAN总线系统;美国商用车辆制造商们也将注意力转向CAN总线;美国一些企业已将CAN作为内部总线应用在生产线和机床上。同时,由于CAN总线可以提供较高的安全性,因此在医疗领域、纺织机械和电梯控制中也得到广泛应用。 三、CAN的工作原理 当CAN总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。对每个节点来说,无论数据是否是发给自己的,都对其进行接收。每组报文开头的11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。在同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文。当几个站同时竞争总线读取时,这种配置十分重要。 CAN总线的报文发送和接收参见图1。当一个站要向其它站发送数据时,该站的CPU将要发送的数据和自己的标识符传送给本站的CAN芯片,并处于准备状态;当它收到总线分配时, 转为发送报文状态。CAN芯片将数据根据协议组织成一定的报文格式发出,这时网上的其它站处于接收状态。每个处于接收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。 由于CAN总线是一种面向内容的编址方案,因此很容易建立高水准的控制系统并灵活地进行配置。我们可以很容易地在CAN总线中加进一些新站而无需在硬件或软件上进行修改。当所提供的新站是纯数据接收设备时,数据传输协议不要求独立的部分有物理目的地址。它允许分布过程同步化,即总线上控制器需要测量数据时,可由网上获得,而无须每个控制器都有自己独立的传感器。 四、位仲裁 要对数据进行实时处理,就必须将数据快速传送,这就要求数据的物理传输通路有较高的速度。在几个站同时需要发送数据时,要求快速地进行总线分配。实时处理通过网络交换的紧急数据有较大的不同。一个快速变化的物理量,如汽车引擎负载,将比类似汽车引擎温度这样相对变化较慢的物理量更频繁地传送数据并要求更短的延时。
CAN总线协议 控制器局域网总线(CAN, Controller Area Network )是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。该协议的健壮性使其 用途延伸到其他自动化和工业应用。CAN协议的特性包括完整性的串行数据通讯、提供实时 支持、传输速率高达1Mb/s、同时具有11位的寻址以及检错能力。 CAN总线发展 控制器局域网CAN( Controller Area Network)属于现场总线的范畴,是一种有效支持分布式控制系统的串行通信网络。是由德国博世公司在20世纪80年代专门为汽车行业开发的一种串行通信总线。而且能够检测出产生的任何错误。当信号传输距离达到10km时,CAN仍可提供高达50kbit/s的数据传输速率。 CAN总线的工作原理 CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以 使用光缆连接,而且在这种总线上总线协议支持多主控制器。[1]CAN与I2C总线的许多细节 很类似,但也有一些明显的区别。当CAN总线上的一个节点(站)发送数据时,它以报文形式 广播给网络中所有节点。对每个节点来说,无论数据是否是发给自己的,都对其进行接收。每组报文开头的11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。在同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文。当几个站同时竞争总线读取时,这种配置十分重要。 当一个站要向其它站发送数据时,该站的CPU将要发送的数据和自己的标识符传送给 本站的CAN芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。CAN芯片将数据根据协议组织成一定的报文格式发出,这时网上的其它站处于接收状态。每个处于接 收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。 由于CAN总线是一种面向内容的编址方案,因此很容易建立高水准的控制系统并灵活地进行配置。我们可以很容易地在CAN总线中加进一些新站而无需在硬件或软件上进行修改。 当所提供的新站是纯数据接收设备时,数据传输协议不要求独立的部分有物理目的地址。它允许分布过程同步化,即总线上控制器需要测量数据时,可由网上获得,而无须每个控制器 都有自己独立的传感器。 CAN总线在空闲(没有节点传输报文)时是一直处于隐性状态。当有节点传输报文时显性覆盖隐性,由于CAN总线是一种串行总线,也就是说报文是一位一位的传输的,而且是数字信号(0和1),1代表隐性,0代表显性。在传送报文的过程中是显隐交替的,就像二进制数字0101001等,这样就能把信息发送出去,而总线空闲的时候是一直处于隐性的。 CAN总线特征 (1)报文(Message)总线上的数据以不同报文格式发送,但长度受到限制。当总线空闲时, 任何一个网络上的节点都可以发送报文。 ⑵信息路由(Information Routing)在CAN中,节点不使用任何关于系统配置的报文,比 如站地址,由接收节点根据报文本身特征判断是否接收这帧信息。因此系统扩展时,不用对应用层以及任何节点的软件和硬件作改变,可以直接在CAN中增加节点。 (3) 标识符(Identifier)要传送的报文有特征标识符(是数据帧和远程帧的一个域),它给出的不是目标节点地址,而是这个报文本身的特征。信息以广播方式在网络上发送,所有节点都可以接收到。节点通过标识符判定是否接收这帧信息。
can总线结构和原理 控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。该协议的健壮性使其用途延伸到其他自动化和工业应用。CAN协议的特性包括完整性的串行数据通讯、提供实时支持、传输速率高达1Mb/s、同时具有11位的寻址以及检错能力。CAN系统组成CAN总线用户接口简单,编程方便。网络拓扑结构采用总线式结构。这种网络结构简单、成本低,并且采用无源抽头连接,系统可靠性高。通过CAN总线连接各个网络节点,形成多主机控制器局域网(CAN)。信息的传输采用CAN通信协议,通过CAN控制器来完成。各网络节点一般为带有微控制器的智能节点完成现场的数据采集和基于CAN协议的数据传输,节点可以使用带有在片CAN控制器的微控制器,或选用一般的微控制器加上独立的CAN控制器来完成节点功能。传输介质可采用双绞线、同轴电缆或光纤。如果需要进一步提高系统的抗干扰能力,还可以在控制器和传输介质之间加接光电隔离,电源采用DC-DC变换器等措施。这样可方便构成实时分布式测控系统。微控制器,或选用一般的微控制器加上独立的CAN控制器来完成节点功能。传输介质可采用双绞线、同轴电缆或光纤。如果需要进一步提高系统的抗干扰能力,还可以在控制器和传输介质之间加接光电隔离,电源采用DC-DC变换器等措施。这样可方便构成实时分布式测控系统。 CAN总线的物理接口采用CAN收发器PCA82C250作为CAN控制器和物理总线之间的接口,提供向总线的差动发送能力和对CAN控制器的差动接收能力。 一般在驱动芯片和CAN控制器之间加入光电耦合器,增加抗干扰能力。CAN总线的速度将由光电耦合器的速度决定。比如:用4N27光耦,因为它的响应速度比较慢,CAN网络的位速度只能达到几十Kbit/s。如果采用6N137高速光电耦合器,CAN网络速度可以达到和电阻网络驱动时的速度一样。另外,物理层的设计要注意电缆的终端阻抗匹配,这直接影响了CAN总线能否正常工作和网络性能,一般在CAN总线两端并联120的电阻。
CAN总线原理及应用 摘要介绍了CAN总线的特点、工作原理和应用领域,并且对每个应用领域进行了描述和举例讲解。 关键字 CAN总线,汽车,现场控制系统,通信 1 引言 控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议由德国的Robert Bosch公司开发,用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。该协议的健壮性使其用途延伸到其他自动化和工业应用。CAN协议的特性包括完整性的串行数据通讯、提供实时支持、传输速率高达1Mb/s、同时具有11位的寻址以及检错能力。 CAN总线是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电子干扰性,并且能够检测出产生的任何错误。CAN总线可以应用于汽车电控制系统、电梯控制系统、安全监测系统、医疗仪器、纺织机械、船舶运输等领域。 2 CAN总线的特点 ●具有实时性强、传输距离较远、抗电磁干扰能力强、成本低等优点; ●采用双线串行通信方式,检错能力强,可在高噪声干扰环境中工作; ●具有优先权和仲裁功能,多个控制模块通过CAN 控制器挂到CAN-bus 上,形成多主机局部网络; ●可根据报文的ID决定接收或屏蔽该报文; ●可靠的错误处理和检错机制; ●发送的信息遭到破坏后,可自动重发; ●节点在错误严重的情况下具有自动退出总线的功能; ●报文不包含源地址或目标地址,仅用标志符来指示功能信息、优先级信息。 3 CAN总线的工作原理 CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。CAN与I2C总线的许多细节很类似,但也有一些明显的区别。 当CAN总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。对每个节点来说,无论数据是否是发给自己的,都对其进行接收。每组报文开头的11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。在同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文。当几个站同时竞争总线读取时,这种配置十分重要。 当一个站要向其它站发送数据时,该站的CPU将要发送的数据和自己的标识符传送给本站的CAN芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。CAN芯片将数据根据协议组织成一定的报文格式发出,这时网上的其它站处于接收状态。每个处于接收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。
CAN总线协议 控制器局域网总线(CAN,Controller Area Network)是一种用于实时应用的串行通讯协议总线,它可以使用双绞线来传输信号,是世界上应用最广泛的现场总线之一。CAN协议用于汽车中各种不同元件之间的通信,以此取代昂贵而笨重的配电线束。该协议的健壮性使其用途延伸到其他自动化和工业应用。CAN协议的特性包括完整性的串行数据通讯、提供实时支持、传输速率高达1Mb/s、同时具有11位的寻址以及检错能力。 CAN总线发展 控制器局域网CAN( Controller Area Network)属于现场总线的范畴,是一种有效支持分布式控制系统的串行通信网络。是由德国博世公司在20世纪80年代专门为汽车行业开发的一种串行通信总线。而且能够检测出产生的任何错误。当信号传输距离达到10km时,CAN仍可提供高达50kbit/s的数据传输速率。 CAN总线的工作原理 CAN总线使用串行数据传输方式,可以1Mb/s的速率在40m的双绞线上运行,也可以使用光缆连接,而且在这种总线上总线协议支持多主控制器。[1]CAN与I2C总线的许多细节很类似,但也有一些明显的区别。当CAN总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。对每个节点来说,无论数据是否是发给自己的,都对其进行接收。每组报文开头的11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。在同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文。当几个站同时竞争总线读取时,这种配置十分重要。 当一个站要向其它站发送数据时,该站的CPU将要发送的数据和自己的标识符传送给本站的CAN芯片,并处于准备状态;当它收到总线分配时,转为发送报文状态。CAN芯片将数据根据协议组织成一定的报文格式发出,这时网上的其它站处于接收状态。每个处于接收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。由于CAN总线是一种面向内容的编址方案,因此很容易建立高水准的控制系统并灵活地进行配置。我们可以很容易地在CAN总线中加进一些新站而无需在硬件或软件上进行修改。当所提供的新站是纯数据接收设备时,数据传输协议不要求独立的部分有物理目的地址。它允许分布过程同步化,即总线上控制器需要测量数据时,可由网上获得,而无须每个控制器都有自己独立的传感器。 CAN总线在空闲(没有节点传输报文)时是一直处于隐性状态。当有节点传输报文时显性覆盖隐性,由于CAN总线是一种串行总线,也就是说报文是一位一位的传输的,而且是数字信号(0和1),1代表隐性,0代表显性。在传送报文的过程中是显隐交替的,就像二进制数字0101001等,这样就能把信息发送出去,而总线空闲的时候是一直处于隐性的。 CAN总线特征 (1)报文(Message)总线上的数据以不同报文格式发送,但长度受到限制。当总线空闲时,任何一个网络上的节点都可以发送报文。 (2)信息路由(Information Routing)在CAN中,节点不使用任何关于系统配置的报文,比如站地址,由接收节点根据报文本身特征判断是否接收这帧信息。因此系统扩展时,不用对应用层以及任何节点的软件和硬件作改变,可以直接在CAN中增加节点。 (3)标识符(Identifier) 要传送的报文有特征标识符(是数据帧和远程帧的一个域),它给出的不是目标节点地址,而是这个报文本身的特征。信息以广播方式在网络上发送,所有节点都可以接收到。节点通过标识符判定是否接收这帧信息。
电动轿车CAN总线系统的原理和工作状态1.CAN总线的特点及通信协议 电动轿车对通信系统的要求是: ①数据传输可靠、实时性高,传输速率高、误码率低;系统的可 靠; ②系统的可靠性高,即当节点或总线出现故障时对整车性能的影 响尽可能的小; ③系统的鲁棒性好,允许多主网络存在。 CAN总线作为一种有效支持分布式控制或实时控制的串行通信网络完全能够满足这些要求,其模型结构只有三层,即物理层、数据链路层和应用层。传输介质为双绞线,通信速率最高可达1Mbps/40m,直接传输距离最远可达10km/5kbps,可挂接设备数最多可达110个。CAN为多主工作方式,通信方式灵活,无需站地址等节点信息,采用非破坏性总线仲裁技术,满足实时要求。另外,CAN采用短帧结构传输信号,传输时间短,具有较强的抗干扰能力。 CAN通信协议规定了4种不同的帧格式,即数据帧、远程帧、错误帧和超载帧。基于下列5条基本规则进行通信协调: ①总线访问; ②仲裁; ③编码/解码; ④出错标注; ⑤超载标注。
SAE J1939协议在CAN总线通信协议2.OB之上具体实现了应用层,成为载货车和大客车广泛使用的通信标准。SAE J1939使用PDU 来实施和封装CAN的标准格式。 具体定义如下:协议数据单元PDU由优先权P、参数组号PGN、源地址SA和数据DATA组成。参数组号PGN又由保留位R、数据页DP、PDU格式PF和PDU特定域PS组成。J1939/71应用层文档定义了车辆控制的各种参数及命令的PGN。 2.系统原理框图 图1为电动轿车CAN总线系统原理框图,由中央控制器、电池管理系统、电机控制系统、制动控制系统、仪表控制系统组成。各个控制器之间通过CAN总线进行通信,以实现传感器测量数据的共享、控制指令的发送和接收等,并使各自的控制性能都有所提高,从而提高系统的控制性能。它们之间的通信与信息类型为信息类和命令类。信息类主要是发送一些信息,如传感器信号、诊断信息、系统的状态。命令类则主要是发送给其他执行器的命令。通信有以下主要内容。
一汽宝来轿车CAN数据传输系统的原理与故障诊断 CAN数据传输系统的原理与故障诊断 一汽-大众汽车生产的宝来(Bora)轿车,已于2001年12月9日上市,该车融合了许多高新技术,在动力传动系统和舒服系统中装用了两套CAN数据传输系统(图1),本文将对此系统加以介绍。 图1 两套CAN数据传输系统 1—发动机操纵单元;2—ABS操纵单元;3、5、7、8—车门操纵单元; 4—自动变速器操纵单元;6—中央操纵单元 1 CAN数据传输系统概述
(1)什么缘故要采纳数据总线 我们明白,汽车两块电脑之间的信息传递,有几个信号就要有几条信号传输线(信号传输线的接地端能够采纳公共回路),例如,宝来轿车发动机电控单元J220与自动变速器电控单元J217之间就需要有5条信号传输线。假如传递信号项目多还需要更多的信号传输线,如此会导致电控单元针脚数增加、线路复杂、故障率增多及修理困难。 (2)什么是数据总线 一辆汽车不管有多少块电控单元,不管信息容量有多大,每块电控单元都只需引出两条线共同接在两个节点上,这两条导线就称作数据总线。往常各电控单元之间好比有许多人骑着自行车来来往往,现在是这些人乘坐公共汽车,公共汽车能够运输大量乘客,故数据总线亦称BUS线。 (3)什么是CAN协议 电子运算机网络用电子语言来说话,各电控单元必须使用和解读相同的电子语言,这种语言称“协议”,汽车电脑网络常见的传输协议有数种。宝来车装用博世公司产品,数据总线采纳CAN协议,那个协议是由福持、Internet与博世公司共同开发的高速汽车通信协议。CAN 是Controller Area Network(操纵单元区域网络)的缩写,意思是操纵单元通过网络交换数据。 (4)CAN数据传输系统的优点 数据总线与其他部件组合在一起就成为数据传输系统,CAN数据传输系统的优点是:
一.CAN总线简介 1. CAN总线的发展历史 20世纪80年代初期,欧洲汽车工业的蓬勃发展,车辆电子信息化程度的也不断提高。当时,由于消费者对于汽车功能的要求越来越多,而这些功能的实现大多是基于电子操作的,这就使得电子装置之间的通讯越来越复杂,同时意味着需要更多的连接信号线,但是传统的线束式汽车电子系统已经不能满足车辆电子信息功能发展的需求。为了解决这一制约现代汽车电子信息化发展的瓶颈,德国Bosch公司设计了一个单一的网络总线,所有的外围器件可以被挂接在该总线上,经过试验,这一总线能够有效解决现代汽车中庞大的电子控制装置之间的通讯,并且能够减少不断增加的信号线。所以在1986年Bosch公司正式公布了这一总线,且命名为CAN总线。 CAN控制器局部网(CAN—Controller Area Network)属于现场总线的范畴,它是一种有效支持分布式控制或实时控制的串行通讯网络,它具有很高的网络安全性、通信可靠性和实时性,简单实用,网络成本低,特别适用于汽车计算机控制系统和环境恶劣、电磁辐射强和振动大的工业环境,因此CAN总线在诸多现场总线中独占鳌头,成为汽车总线的代名词,CAN总线开始进入快速发展时期:1987年Intel公司生产出了首枚CAN控制器(82526)。不久,Philips公司也推出了CAN 控制器82C200; 1991年,Bosch颁布CAN 2.0技术规范,CAN2.0包括A和B两个部分 为促进CAN以及CAN协议的发展,1992在欧洲成立了国际用户和厂商协会(CAN in Automation,简称CiA),在德国Erlangen注册,CiA总部位于Erlangen。CiA提供服务包括:发布CAN的各类技术规范,免费下载CAN文献资料,提供CANopen规范DeviceNet规范;发布CAN产品数据库,CANopen 产品指南;提供CANopen验证工具执行CANopen认证测试;开发CAN规范并发布为CiA标准。 1993 年CAN 成为国际标准ISO11898(高速应用)和ISO11519(低速应用); 1993年,ISO颁布CAN国际标准ISO-11898; 1994年,SAE颁布基于CA N的J1939标准;
CANBUS介绍及工作原理 什么是CANBUS? CANBUS即CAN总线技术,全称为“控制器局域网总线技术(Controller Area Network-BUS)”。CANBUS总线技术最早被用于飞机、坦克等武器电子系统的通讯联络上。将这种技术用于民用汽车最早起源于欧洲,在汽车上这种总线网络用于车上各种传感器数据的传递。 CANBUS的工作原理 大家知道当今车辆的电控系统是越来越多,例如电子燃油喷射装置、ABS装置、安全气囊装置、电动门窗、主动悬架等等。同时遍布于车身的各种传感器实时的监测车辆的状态信息,并将此信息发送至相对应的控制单元内。 『车身上各种控制单元的分布图』 通过上图我们可以看到车身上的各种控制单元,车越高级,车身上的控制单元也就越多,每个控制单元都可看做一台独立的电脑,它可以接受信息,同时能对各种信息进行处理、分析,然后发出一个指令。比如发动机控制单元会接受来自进气压力传感器、发动机温度传感器、油门踏板位置传感器、发动机转速传感器等等的信息,在经过分析和处理后会发送相应的指令来控制喷油嘴的喷油量、点火提前角等等,其它控制单元的工作原理也都类似。在这里可以给大家做一个比喻,车上的各种控制单元就好比一家公司各个部门的经理,每个部门的经理接受来自自己部门员工的工作汇报,经过分析作出决策,并命令该部门的员工去执行。 『控制单元』 车身上的这些控制单元并不是独立工作的,它们作为一个整体,需要信息的共享,那么这就存在一个信息传递的问题。比如发动机控制单元内的发动机转速与油门踏板位置这两个信号也需要传递给自动变速器的控制单元,然后自动变速器控制单元会据此来发出升档和降档的操作指令,那么两个控制单元之间又是如何进行通信的呢? 『每项信息都通过各自独立的数据线进行交换』 目前在车辆上应用的信息传递形式有两种。第一种是每项信息都通过各自独立的数据线进行交换。比如两个控制单元间有5种信息需要传递,那么则需要5根独立的数据线。也就是说信息的种类越多,数据线的数量和控制单元的针脚数也会相应增加。这些复杂繁多的线束无疑会增加车身重量,也为整车的布线带来一定困难。 『所有信息都通过两根数据线进行交换』 第二种方式是控制单元之间的所有信息都通过两根数据线进行交换,这种数据线也叫CAN数据总线。通过该种方式,所有的信息,不管信息容量的大小,都可以通过这两条数据线进行传递,这种方式充分的提高了整个系统的运行效率。我们常见的电脑键盘有104个按键,却可以发出数百种不同的指令,但键盘与电脑主机之间的数据连接线只有7根,键盘正是依靠这7根数据连接线上不同的编码信号来传递信息的。CAN数据总线的原理也正是如此。这种一线一用的专线制改为一线多用制,可以大大减少汽车上电线的数量,同时也简化了整
CAN BUS的工作原理 CAN的工作原理 当CAN总线上的一个节点(站)发送数据时,它以报文形式广播给网络中所有节点。对每个节点来说,无论数据是否是发给自己的,都对其进行接收。每组报文开头的11位字符为标识符,定义了报文的优先级,这种报文格式称为面向内容的编址方案。在同一系统中标识符是唯一的,不可能有两个站发送具有相同标识符的报文。当几个站同时竞争总线读取时,这种配置十分重要。当一个站要向其它站发送数据时,该站的CPU将要发送的数据和自己的标识符传送给本站的CAN芯片,并处于准备状态;当它收到总线分配时, 转为发送报文状态。CAN芯片将数据根据协议组织成一定的报文格式发出,这时网上的其它站处于接收状态。每个处于接收状态的站对接收到的报文进行检测,判断这些报文是否是发给自己的,以确定是否接收它。 由于CAN总线是一种面向内容的编址方案,因此很容易建立高水准的控制系统并灵活地进行配置。我们可以很容易地在CAN总线中加进一些新站而无需在硬件或软件上进行修改。当所提供的新站是纯数据接收设备时,数据传输协议不要求独立的部分有物理目的地址。它允许分布过程同步化,即总线上控制器需要测量数据时,可由网上获得,而无须每个控制器都有自己独立的传感器。 什么是CAN ? CAN,全称为“Controller Area Network”,即控制器局域网,是国际上应用最广泛的现场总线之一。最初,CAN被设计作为汽车环境中的微控制器通讯,在车载各电子控制装置ECU之间交换信息,形成汽车电子控制网络。比如:发动机管理系统、变速箱控制器、仪表装备、电子主干系统中,均嵌入CAN控制装置。 一个由CAN 总线构成的单一网络中,理论上可以挂接无数个节点。实际应用中,节点数目受网络硬件的电气特性所限制。例如,当使用Philips P82C250作为CAN收发器时,同一网络中允许挂接110个节点。CAN 可提供高达1Mbit/s的数据传输速率,这使实时控制变得非常容易。另外,硬件的错误检定特性也增强了CAN的抗电磁干扰能力。 CAN 是怎样发展起来的? CAN最初出现在80年代末的汽车工业中,由德国Bosch公司最先提出。当时,由于消费者对于汽车功能的要求越来越多,而这些功能的实现大多是基于电子操作的,这就使得电子装置之间的通讯越来越复杂,同时意味着需要更多的连接信号线。提出CAN总线的最初动机就是为了解决现代汽车中庞大的电子控制装置之间的通讯,减少不断增加的信号线。于是,他们设计了一个单一的网络总线,所有的外围器件可以被挂接在该总线上。1993年,CAN 已成为国际标准ISO11898(高速应用)和ISO11519(低速应用)。 CAN是一种多主方式的串行通讯总线,基本设计规范要求有高的位速率,高抗电磁干扰性,而且能够检测出产生的任何错误。当信号传输距离达到10Km时,CAN 仍可提供高达50Kbit/s的数据传输速率。 由于CAN总线具有很高的实时性能,因此,CAN已经在汽车工业、航空工业、工业控制、安全防护等领域中得到了广泛应用。 CAN 是怎样工作的? CAN通讯协议主要描述设备之间的信息传递方式。CAN层的定义与开放系统互连模型(OSI)一致。每一层与另一设备上相同的那一层通讯。实际的通讯发生在每一设备上相邻的两层,而设备只通过模型物理层的物理介质互连。CAN的规范定义了模型的最下面两层:数据链路层和物理层。下表中展示了OSI开放式互连模型的各层。应用层协议可以由CAN用户定义成适合特别工业领域的任何方案。已在工业控制和
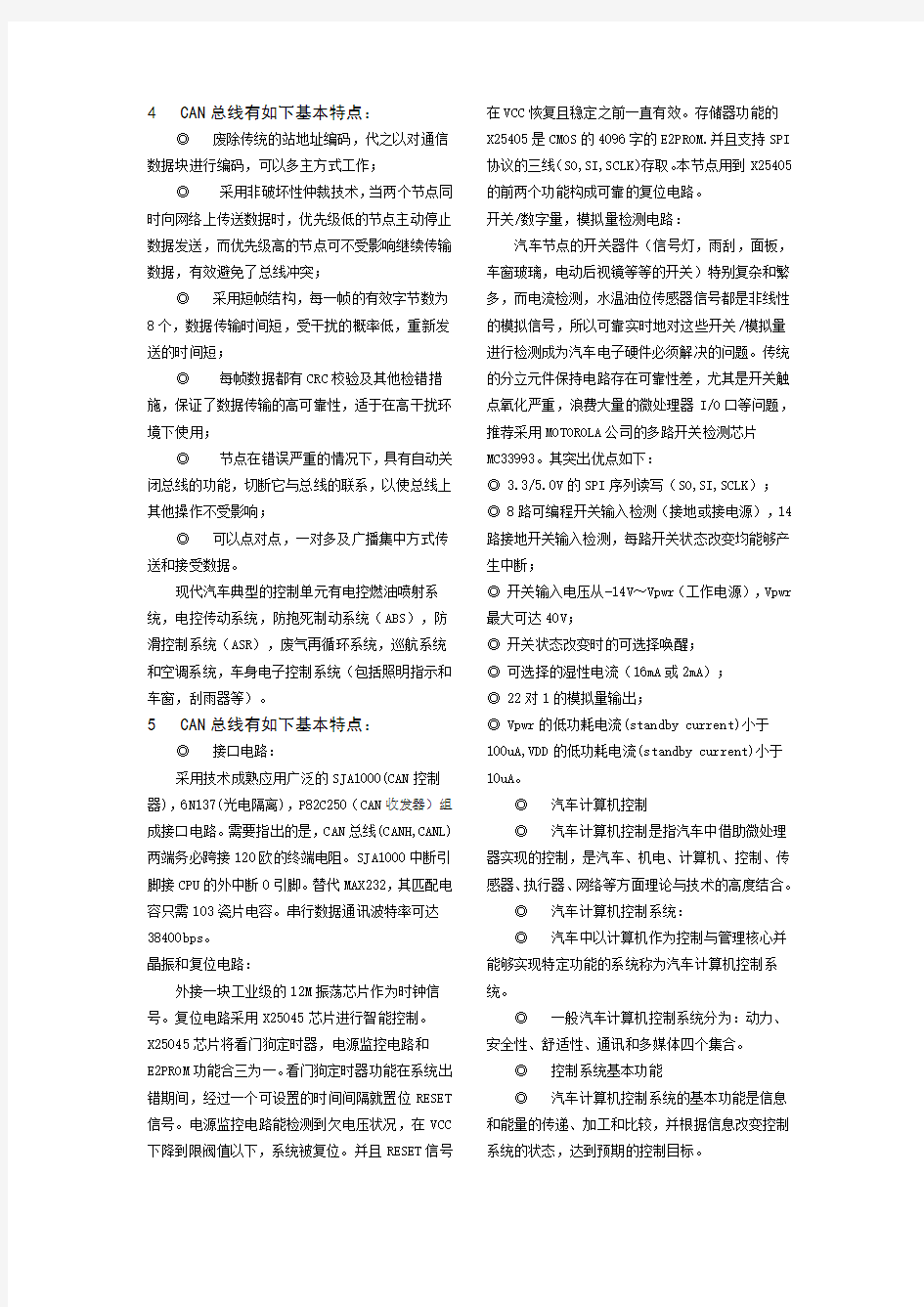
汽车CAN总线的结构原理与诊断分析 【摘要】 CAN总线(Controller Area Network,即控制器局域网)是汽车产业发展的一门新兴技术,可有效简化车辆电气线路、节约成本、提高车辆的可靠性。本文以CB311 AT系列车(以下简称“CB311”)采用的动力型线形CAN总线为例,介绍了CAN总线的总体结构、数据传输信号特征及故障的诊断分析方法。 【关键词】CAN总线故障诊断分析 1 前言 随着经济社会的发展和人类文明的进步,人们对汽车的安全性、舒适性、尾气排放及燃油经济性的要求越来越严格,汽车上的电子控制系统越来越多,在为人们带来安全、方便、舒适的同时,却使车内线束增多、运行可靠性降低、故障维修难度增大。为了简化线路,提高各电子控制系统之间的通信速度,降低故障频率,CAN总线应运而生。 CAN总线是由德国Bosch公司首先制订推出的针对汽车电子控制领域的总线式串行数据通讯网络。CAN总线可分为动力型(高速)、舒适型(低速)、信息娱乐型(低速);CAN总线的网络拓扑结构主要有线形结构、星形结构、环形结构。 2 CAN总线的总体结构 CAN总线由CAN控制器、CAN收发器、数据传输线、数据传输终端等组成。CB311的ECU(发动机控制单元)、TCU(变速器控制单元)、PEPS(无钥匙进入和无钥匙启动系统)、组合仪表四个电控单元通过CAN总线连接,CAN控制器、CAN收发器均集成在电控单元中。CB311 CAN总线的结构如图1所示。
图1 CB311 CAN总线的总体结构 2.1 CAN控制器 CAN控制器集成在电控单元内部,接收由控制单元微处理器传来的数据。CAN控制器对这些数据进行处理并将其传递给CAN收发器;同样CAN控制器也接收收发器传来的数据,处理后传递给控制单元微处理器。 2.2 CAN收发器 CAN收发器集成在电控单元内部,同时兼具接收、发送和转化数据信号的功能。它将CAN控制器发送来的电平信号数据转化为电压信号并通过数据传输线以广播方式发送出去。同时,它接收数据传输线发送来的电压信号并将电压信号转化为电平信号数据后,发送到CAN控制器。 2.3 数据传输线 为了减少干扰,CAN总线的数据传输线采用双绞线,其绞距为20mm,截面积为0.5mm2,称这两根线为CAN-高线 (CAN-H)和CAN-低线 (CAN-L),如图2所示。两根线上传输的数据相同,电压值互成镜像,这样,两根线的电压差保持一个常值,所产生的电磁场效应也会由于极性相反而互相抵消。通过该方法,数据传输线可免受外界辐射的干扰;同时,向外辐射时,实际上保持中性(即无辐射)。 图2 CAN总线数据传输线 2.4 数据传输终端 数据传输终端是一个电阻器,阻止数据在传输终了被反射回来破坏数据,一般数据传输终端为120Ω的电阻。CB311的数据传输终端为两个120Ω的电阻,分别集成在ECU和组合仪表中。 3 CAN总线的数据传输信号特征 CAN总线控制单元中传递的数据是二进制格式的电平信号,数据的每一位只有0或1两个值,其中0表示显性状态,1表示隐性状态。CAN总线数据传输线中传输的是电压信号,在隐性状态,CAN-H和CAN-L的对地电压均为2.5V左右,此时CAN总线未通讯;在显性状态,CAN-H的对地电压升至3.5V左右,CAN-L的对地电压降至为1.5V左右,此时CAN总线在通讯。
汽车can总线工作原理及测量方法详解 发表于2018-04-25 08:54:18 接口/总线/驱动 +关注 CAN总线的总体结构 CAN总线由CAN控制器、CAN收发器、数据传输线、数据传输终端等组成。CB311的ECU(发动机控制单元)、TCU(变速器控制单元)、FEPS (无钥匙进入和无钥匙启动系统)、组合仪表四个电控单元通过CAN总线连接,CAN控制器、CAN收发器均集成在电控单元中。CB311CAN总线的结构如图1所示。 图1 CB311 CAN总线的总体结构 1、CAN控制器
CAN控制器集成在电控单元内部,接收由控制单元微处理器传来的数据。CAN控制器对这些数据进行处理并将其传递给CAN收发器;同样CAN 控制器也接收收发器传来的数据,处理后传递给控制单元微处理器。 2、CAH收发器 CAN收发器集成在电控单元内部,同时兼具接收、发送和转化数据信号的功能。它将CAN控制器发送来的电平信号数据转化为电压信号并通过数据传输线以广播方式发送出去。同时,它接收数据传输线发送来的电压信号并将电压信号转化为电平信号数据后,发送到CAN控制器。 3、数据传输线 为了减少干扰,CN总线的数据传输线采用双绞线,其绞距为20mm,截面积为0.5m,称这两根线为CAN-高线(CAN-H)和CAN-低线(CAN-L),如图2所示。两根线上传输的数据相同,电压值互成镜像,这样,两根线的电压差保持一个常值,所产生的电磁场效应也会由于极性相反而互相抵消。通过该方法,数据传输线可免受外界辐射的干扰;同时,向外辐射时,实际上保持中性(即无辐射)。 4、数据传输终端 数据传输终端是一个电阻器,阻止数据在传输终了被反射回来破坏数据,一般数据传输终端为120Q的电阻。CB311的数据传输终端为两个1202的电阻,分别集成在BCU和组合仪表中。 汽车CAN总线数据传输系统构成及工作原理