第36卷增刊2008年9月
福州大学学报(自然科学版)
Journal of Fuzhou University(Natural Science)
Vol.36Supp.
Sep.2008
文章编号:1000-2243(2008)S0-S161-05惯性平台稳定回路的多环控制
周结华,彭侠夫,何栋炜
(厦门大学信息科学与技术学院,福建厦门 361005)
摘要:稳定回路在惯性平台工作过程中起着重要的作用,它的精度直接影响着惯性平台的精度.稳定回路是通
过控制直流力矩电机的工作来实现系统的控制,通常稳定回路都是通过在系统中加位置控制环的方式达到控
制的性能要求.本文采用多环控制的方式来设计稳定回路,并且针对实际工程应用的直流力矩电机,利用
MAT LAB进行仿真,验证了其设计的性能.
关键词:惯性稳定平台;稳定回路;多环控制;MAT LAB仿真
中图分类号:TP273 文献标识码:A
M ulti-loop con trol of i n erti a l pl a tform servo loop
Z HOU J ie-hua,PE NG Xia-fu,HE Dong-wei
(College of I nf or mati on Science and Technol ogy,Xia men University,Xia men,Fujian361005,China) Abstract:The servo l oop p lays i m portant r ole in the work p r ocess of inertial p latf or m,s o its accuracy
directly affects the accuracy of the inertial p latf or m.The servo l oop uses the direct current momentmo2 t or t o carry out the contr ol of the syste m,and it used t o add the positi on contr ol t o enhance the per2
f or mance of the syste m.The article uses multi-l oop contr ol t o design the servo l oop and makes use of
MAT LAB t o si m ulati on which verifies the perf or mance of the syste m.
Keywords:inertial stable p latfor m;servo l oop;multi-l oop contr ol;MAT LAB si m ulati on
惯性稳定平台在工作过程中,主要使平台跟踪地理坐标系[1].要使平台成功地跟踪地理坐标系,就需要给陀螺仪施加控制力矩使主轴随地理坐标系进动.而稳定回路的功能之一就是保证平台台体准确地跟踪陀螺仪主轴的进动,从而达到平台跟踪地理坐标系的目的.在惯性稳定平台工作过程中,稳定回路除了能实现可靠的跟踪功能,还必须实现稳定的功能,即稳定回路应该尽量减小各种干扰力矩对台体跟踪陀螺主轴的影响.所以对稳定回路的研究有利于提高惯性稳定平台的性能.
1 稳定回路的结构和数学模型
1.1 稳定回路结构
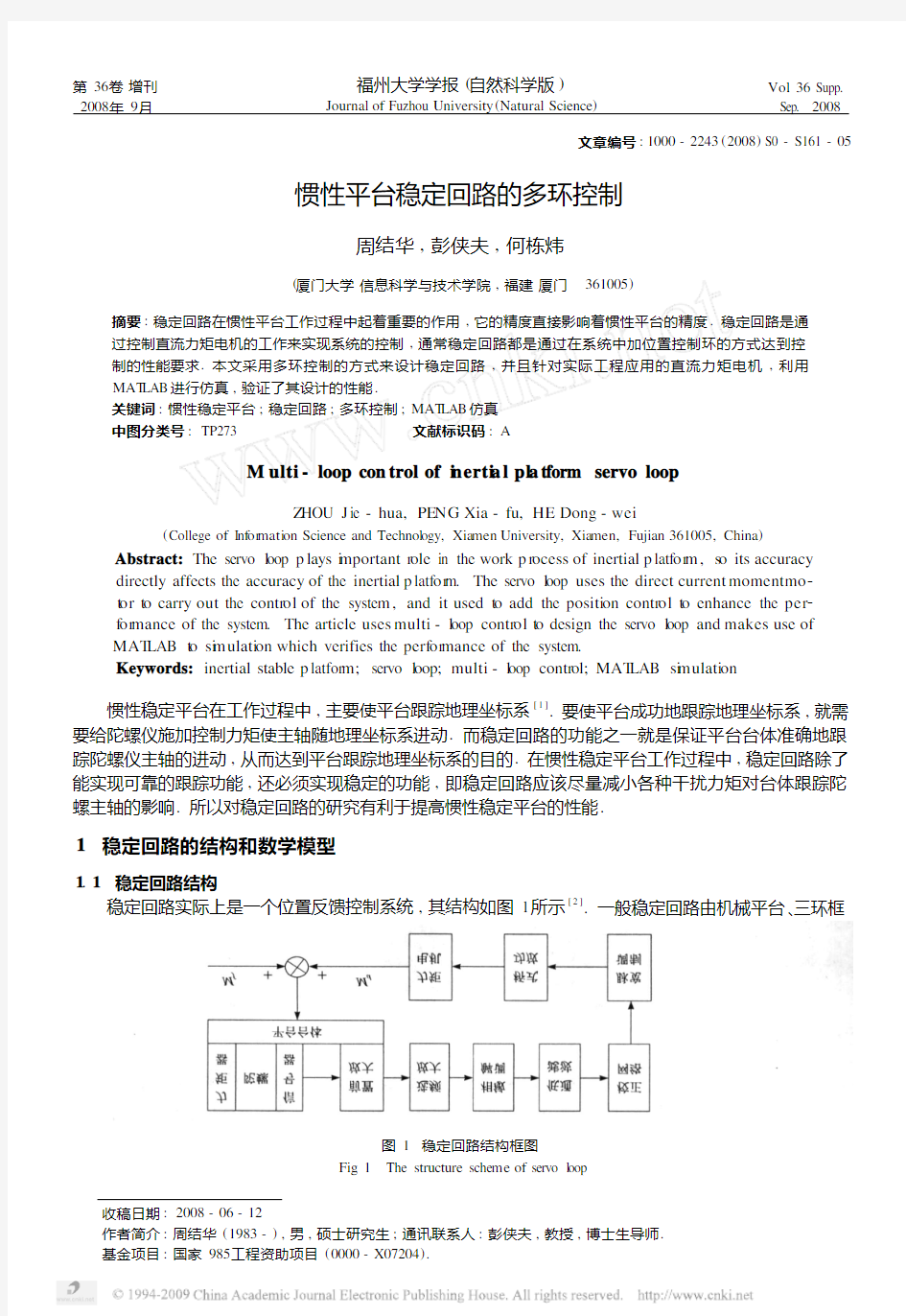
稳定回路实际上是一个位置反馈控制系统,其结构如图1所示[2].一般稳定回路由机械平台、三环框
图1 稳定回路结构框图
Fig.1 The structure sche me of servo l oop
收稿日期:2008-06-12
作者简介:周结华(1983-),男,硕士研究生;通讯联系人:彭侠夫,教授,博士生导师.
基金项目:国家985工程资助项目(0000-X07204).
福州大学学报(自然科学版)第36卷架和安装在平台上的陀螺仪、力矩电机、坐标变换器以及控制电路组成.机械平台是安装陀螺仪和加速度的载体,三环框架为其提供3个方向的转动自由度.陀螺仪是角度敏感元件,敏感平台与陀螺仪主轴之间的角度差.输出幅度与此角度差成比例的正弦信号,该正弦信号经前置放大环节放大,经线路传输给控制电路板,在控制电路板进行选频放大、带通滤波、全波相敏解调、低通滤波、校正、直流放大、P WM 调制、再经桥式功率放大后驱动力矩电机,使力矩电机带动各环转动相应的角度.
由于是三环结构,需要3条稳定回路,即方位稳定回路、横摇稳定回路、纵摇稳定回路.因此实际的平台动力学方程应该是三维向量方程.平台的控制量、干扰输入、平台输入输出等都是三维空间向量,所以在三维向量间存在交叉耦合.根据有关文献论述,这种交叉耦合作用通常不太显著,在实际设计时可以按单通道原理进行,而且通过实践证明也是可行的[3]
.为此,在本文中分析稳定回路时只分析方位稳定回路的情况,另外横摇稳定回路和纵摇稳定回路与方位稳定回路的设计思想类似.
1.2 稳定回路的数学模型及其经典控制方式
根据有关文献分析可知,在整个平台系统中除了直流力矩电机和校正网络外,其它所有环节均可看作比例环节,而且在稳定系统中,平台台体可以看作力矩电机的负载,它所影响的只是力矩电机的机电时间常数.因此稳定平台数学模型的推导主要依赖于对直流力矩电机数学模型的建立.通过有关文献分析
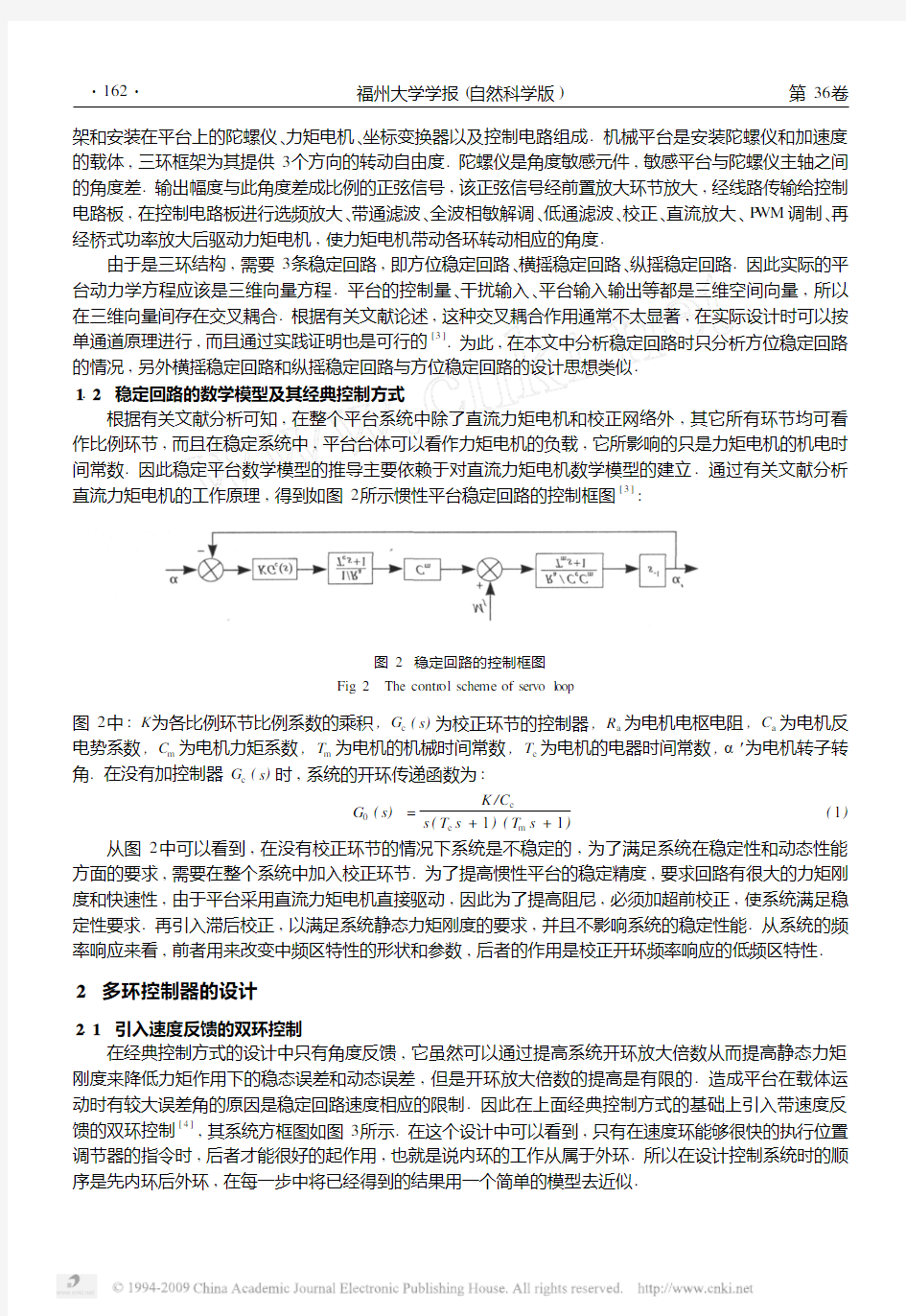
直流力矩电机的工作原理,得到如图2所示惯性平台稳定回路的控制框图[3]
:图2 稳定回路的控制框图
Fig .2 The contr ol sche me of servo l oop
图2中:K 为各比例环节比例系数的乘积,G c (s )为校正环节的控制器,R a 为电机电枢电阻,C a 为电机反电势系数,C m 为电机力矩系数,T m 为电机的机械时间常数,T e 为电机的电器时间常数,α′为电机转子转角.在没有加控制器G c (s )时,系统的开环传递函数为:
G 0(s )=K /C e
s (T e s +1)(T m s +1)(1)
从图2中可以看到,在没有校正环节的情况下系统是不稳定的,为了满足系统在稳定性和动态性能方面的要求,需要在整个系统中加入校正环节.为了提高惯性平台的稳定精度,要求回路有很大的力矩刚度和快速性,由于平台采用直流力矩电机直接驱动,因此为了提高阻尼,必须加超前校正,使系统满足稳定性要求.再引入滞后校正,以满足系统静态力矩刚度的要求,并且不影响系统的稳定性能.从系统的频率响应来看,前者用来改变中频区特性的形状和参数,后者的作用是校正开环频率响应的低频区特性.2 多环控制器的设计
2.1 引入速度反馈的双环控制
在经典控制方式的设计中只有角度反馈,它虽然可以通过提高系统开环放大倍数从而提高静态力矩刚度来降低力矩作用下的稳态误差和动态误差,但是开环放大倍数的提高是有限的.造成平台在载体运动时有较大误差角的原因是稳定回路速度相应的限制.因此在上面经典控制方式的基础上引入带速度反
馈的双环控制[4],其系统方框图如图3所示.在这个设计中可以看到,只有在速度环能够很快的执行位置
调节器的指令时,后者才能很好的起作用,也就是说内环的工作从属于外环.所以在设计控制系统时的顺序是先内环后外环,在每一步中将已经得到的结果用一个简单的模型去近似.
?261?
增刊周结华,等:
惯性平台稳定回路的多环控制图3
带速度反馈的双环控制系统框图
Fig .3 The scheme of double l oop contr ol
2.2 引入速度和功率反馈的多环控制
在单环位置反馈的基础上增加了测速负反馈,形成了双环控制.为了更好的抑制噪声对功率放大环节的干扰,对P WM 功放级采用局部负反馈的措施,这样就是本文所讨论的多环控制,其结构框图如图4所示.
这种多环路结构只能在下述假设下发挥其功能,即越到内环,频带越宽.功率反馈环的响应最快,位置环的响应最慢.很显然,只有在测速环能够很快的执行位置调节器的指令时,后者才能很好的起作用,也就是说每一个内环的工作都从属于外环.设计控制系统时的顺序也是先内环后外环,在每一步中将已经得到的结果用一个简单的模型去近似
.
图4 多环控制系统框图
Fig .4 The sche me of multi -l oop contr ol
3 系统仿真
惯性平台稳定回路要求在1000g ?c m 的常值干扰力矩作用下平台偏差角小于5.5″.超调量小于30%,调节时间小于0.2s,振荡次数小于2次.根据实际所使用的直流力矩电机得到它的主要参数如下:R a =14.36Ω;C e =0.480(V ?rad /s )
-1;C m =4081g ?cm ?A -1;T e =0.96m s ;T m =1.10s.所以航向环的静态力矩刚度大于5×107g ?c m /rad .
引入超前滞后校正环节后控制系统的闭环传递函数为:
G 0(s )=1.995×103s 2+6.783×104s +3.93×1052.376×10-5s 5+0.041s 4+16.54s 3+2.011×103s 2+6.783×104s +3.93×105(2) 利用MAT LAB 仿真[5]得到单环控制系统的阶越响应如图5(a )所示;在1000g ?c m 的常值干扰力矩
作用下的响应,如图5(b )所示.单环控制系统的性能参数如下:超调为21%,调节时间为0.0828s (±
2%),振荡1次;最大动态误差为1.402×10-3rad,即289.2″;稳态误差为2.621×10-5rad,即5.4″;趋
于稳定的时间为0.8055s .
引入速度反馈的双环控制系统的闭环传递函数:
G (1)0(s )=6.69×1051.056×10-3s 2+1.101s +6.693×105(3)
?
361?
福州大学学报(自然科学版)第
36
卷 利用MAT LAB 仿真得到双环控制系统的阶越响应如图6(a )所示和在1000g ?c m 的常值干扰力矩作用下的响应如图6(b )所示.双环控制系统的性能参数如下:超调为19%,调节时间为0.1222s (±2%),
振荡1次;最大动态误差为2.449×10-4rad,即50.5″;稳态误差为1.166×10-5rad,即2.4″;趋于稳定
的时间为0.1755s .
引入速度和功率反馈的多环控制系统的闭环传递函数:
G (2)0(s )=2.506×103s +1.856×1051.584×10-6s 3+2.707×10-3s +2.535×103s +1.877×105(4)利用MAT LAB 仿真得到多环控制系统的阶越响应如图7(a )和在1000g ?c m 的常值干扰力矩作用下的响应如图7(b )所示.多环控制系统的性能参数如下:超调为8%,调节时间为0.08581s (±2%),振荡
1次;最大动态误差为1.29×10-5rad,即2.66″;稳态误差为1.8×10-6rad,即0.37″;趋于稳定的时间为
0.25s
.
?461?
增刊周结华,等:
惯性平台稳定回路的多环控制4 小结利用MAT LAB 对3种控制方式的性能进行了仿真,通过上面的仿真效果可以看到,采用多环控制方式比前面2种控制方式的控制性能要好.多环控制不但提高了系统的抗干扰能力,同时在保证稳定的前提下使系统也获得了很好的跟随性能.
参考文献:
[1]黄德鸣,张树侠,孙枫.平台罗经[M ].北京:国防工业出版社,1990.
[2]黄忠霖.控制系统MAT LAB 计算及仿真[M ].北京:国防工业出版社,2001.
[3]刘军,孟祥忠.电力拖动运动控制系统[M ].北京:机械工业出版社,2007.
[4]黄卫权.舰船用平台式惯导系统测控技术研究[D ].哈尔滨:哈尔滨工程大学,2006.
[5]黄德鸣,程禄.惯性导航系统[M ].哈尔滨:哈尔滨工程大学,1999.
(责任编辑:王阿军)?561?
技术论文学校:南京理工大学队伍:7046 指导老师:李军 成员1:雷杨成员2:陈舒思成员3:邝平作品名称:高精度稳定平台控制系统
摘要 稳定平台能够隔离载体角运动,在载体机动状态下建立稳定基准面,使安装在平台上的光电设备不会因载体运动产生的抖动和滚动而丢失目标,保证光电设备准确瞄准和跟踪目标,因此广泛应用于民用和军事领域。 设计的高精度稳定平台控制系统是以动力调谐陀螺仪为速度敏感元件,旋转变压器为角度测量元件,DSP控制器TMS320F28335为主控芯片,直流力矩电机为被控对象的闭环控制系统。根据所需关键器件的选型设计了系统的硬件电路,包括速度和角度信号采样电路、电机驱动电路、通信电路等。采用电流环和位置环的双闭环控制方式实现系统载体静止时的伺服控制;采用电流环、速度环和位置环的三闭环控制方式实现系统在载体运动时的稳定控制。以上两种控制模式下的角度控制精度都能够达到0.05mrad,载体运动时系统稳定控制模式下隔离扰动效果很好。 实测结果表明,该系统硬件结构简单,稳定性好,实时性强,具有良好的稳态和动态性能,能够满足稳定平台系统的性能要求。 关键词:稳定平台DSP 陀螺仪伺服控制
目录 1. 作品创意 (1) 2. 方案设计与论证 (1) 2.1 主控芯片的选择与论证 (2) 2.2陀螺的选择与论证 (3) 2.3 力矩电机的选择与论证 (3) 2.4 位置检测元件的选择与论证 (3) 3. 系统硬件与原理图设计 (4) 3.1 最小系统外围电路 (4) 3.2 旋转变压器-数字转换器电路 (5) 3.3 滤波采样电路 (6) 3.4 电机驱动电路 (7) 3.5 通信电路 (8) 3.6 闭锁电路 (9) 3.7 电源隔离电路 (9) 4. 软件设计与流程 (10) 4.1 主程序框架 (10) 4.2中断程序设计 (10) 5. 系统测试与分析 (13) 5.1 系统调试环境 (13) 5.2 系统静止状态下伺服控制调试结果 (13) 5.3 系统运动状态下稳定控制调试结果 (15) 6.作品难点与创新 (18) 6.1难点 (18) 6.2创新点 (18)
全方位移动平台控制系统设计 全方位移动平台可实现二维平面内任意方向的移动功能,可实现在狭小空间运送集装物资和长大物资,以及对大件零部件精确定位与安装、装配维修等应用目的。本文提出一种全方位移动平台控制系统方案,使其灵活应用在空间有限、机动性要求高的场合。 1 控制系统整体设计方案 控制系统由手持遥控器和平台控制器两大部分组成,致力于操作者与移动平台的人机交互控制,遥控器加平台控制器的局部自主系统组成完整的控制系统。遥控器和平台控制器均选用*****07系列微处理器为控制核心,控制系统整体框架如图1所示。 系统选用Zigbee网络技术进行无线通讯传输,它是一种新型的短距离无线接入技术,与Wi-Fi、Bluerooth无线技术相比,Zigbee技术具有低成本、低复杂度、低功耗、时延短、组网方便、网络容量大、安全玎靠优势。 针对全方位移动平台在平面上可三自由度运动的移动特性,遥控器端选取通过操纵三轴工业手柄来对应前后、左右平移、中心转向及其复合运动。遥控器端搭载OLED屏用来显示信息,OLED屏相对于LED屏具有抗震性能更好,响应时间短,发光效率高,能耗低等特点。遥控器通过AD采集获取三轴工业手柄模拟量数值,进行均值滤波、模数转换等处理获取当前控制信息,以扫描方式读取遥控器的开关获得当前运行模式、速度等级等控制状态,将相应数据内容同首尾字节、校验码封装成帧,通过串口发送到無线通信模块,将其转发给平台控制器;同时将当前状态发送到遥控器OLED显示屏。 平台控制器的无线通信模块将接收到的信息通过串口转发给控制器,控制器收到的一帧完整、无错误指令后,根据制定的通信协议内容,执行相应功能,同时运算出各电机转速,及电机转向,将其通过CAN总线网络分别发送给相应电机驱动器,驱动电机来完成车体
哈尔滨理工大学实验报告 控制系统仿真 专业:自动化12-1 学号:1230130101 姓名:
一.分析系统性能 课程名称控制系统仿真实验名称分析系统性能时间8.29 地点3# 姓名蔡庆刚学号1230130101 班级自动化12-1 一.实验目的及内容: 1. 熟悉MATLAB软件的操作过程; 2. 熟悉闭环系统稳定性的判断方法; 3. 熟悉闭环系统阶跃响应性能指标的求取。 二.实验用设备仪器及材料: PC, Matlab 软件平台 三、实验步骤 1. 编写MATLAB程序代码; 2. 在MATLAT中输入程序代码,运行程序; 3.分析结果。 四.实验结果分析: 1.程序截图
得到阶跃响应曲线 得到响应指标截图如下
2.求取零极点程序截图 得到零极点分布图 3.分析系统稳定性 根据稳定的充分必要条件判别线性系统的稳定性最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有系统不稳定。有零极点分布图可知系统稳定。
二.单容过程的阶跃响应 一、实验目的 1. 熟悉MATLAB软件的操作过程 2. 了解自衡单容过程的阶跃响应过程 3. 得出自衡单容过程的单位阶跃响应曲线 二、实验内容 已知两个单容过程的模型分别为 1 () 0.5 G s s =和5 1 () 51 s G s e s - = + ,试在 Simulink中建立模型,并求单位阶跃响应曲线。 三、实验步骤 1. 在Simulink中建立模型,得出实验原理图。 2. 运行模型后,双击Scope,得到的单位阶跃响应曲线。 四、实验结果 1.建立系统Simulink仿真模型图,其仿真模型为
《电机与电气控制》期末统考模拟试卷三 一、填空题(30×1分) 1.低压电器一般由,两部分组成。 2.接触器可用于频繁通断电路,又具有保护作用。 3.行程开关也称开关,可将信号转化为电信号,通过控制其它电器来控制运动部分的行程大小、运动方向或进行限位保护。 4.速度继电器是用来反映变化的自动电器。动作转速一般不低于300r/min,复位转速约在。 5.交轴电枢反应的后果是、。 6.直流电机的调速方法有、、。 7.直流电动机直接起动时起动电流过大带来的不良后果有 和。。 8.变压器空载运行时,一次绕组流过的电流(很大、很小)。带载运行时,电流 会(增加、减小),且次电流的大小决定着次电流的大小。 9.列举几个特殊变压器:、、。 10.改变交流电机的转向可以通过改变实现。 11.在异步电动机中,单相绕组通入单相交流电产生磁场;三相绕组通入三相交流电产生磁场。 。 二、判断题(10×2分) 2.使用并励电动机时,发现转向不对,应将接到电源的两根线对调以下即可。()3.并励电机在运行时断开励磁绕组对电机运行没有多大的影响。() 4.正在运行的三相异步电动机突然一相断路,电动机会立即停下来。() 止短路。() 7.绕线电机不能采用变级调速。() 8.转差率S是分析异步电动机运行性能的一个重要参数,当电动机转速越快时,则对应的转差率也就越大。() 9.异步是指转子转速与磁场转速存在差异。() 10.单相电机一般需借用电容分相方能起动。起动后电容可要可不要。() 三、简答题(4×5分) 1.三相异步电动机的定子绕组和转子绕组之间没有直接的联系,为什么输出负载转矩增加时,
定子电流和输入功率会自动增加? 2.三相异步电动机正常运行时,如果转子突然被卡住而不能转动,试问这时电动机的电流有何改变?对电动机有何影响? 3.旋转磁场的形成条件是什么?转动方向是由什么决定的?如何使三相异步电机反转? 4.交流电磁线圈误接入直流电源,直流电磁线圈误接入交流电源,会发生什么问题?为什么?线圈电压为220V的交流接触器,误接入380V交流电源,会发生什么问题?为什么? 四、分析与计算(2×10分) 1.一台并励直流电动机,P N=10KW,U N=220V,I f=1.17A,ηN=84.5%,n N=1500r/min,Ra=0.316Ω,电机拖动恒定不变的负载转矩且在额定运行情况下,调节励磁电阻使磁通减少15%,求:电动机进入新的稳态后的电枢电流和电机转速。 2.分析下图可逆运行能耗制动控制线路工作原理。 五、设计题(10分) 设计一台电机控制电路,要求:该电机能单向连续运行,并且能实现两地控制。有过载、短路保护。 《电机与电气控制》期末统考模拟试卷三答案 1.感受部件、执行部件 2.主电路、欠压保护 3.限位、机械位移 4.转速和转向、100r/min 5.气隙磁场发生畸变、对主磁场有去磁作用 6.改变电枢回路电阻、弱磁、改变电枢电压 7.换向恶化产生严重火花、对生产机械产生过大的冲击力
XX医院质量控制管理平台整体解决实施方 案1 XX医院质量控制管理平台整体解决方案 ————————————————————————————————作者:————————————————————————————————日期: XX医院医疗质量控制管理平台解决方案xx信息技术有限公司 XX医院医疗质量控制管理平台整体解决方案 xx信息技术有限公司 2016年08月28日 目录 1.概述0 1.1. ............................................................................................... ........................ 项目背景0 1.2. ............................................................................................... ........................ 现状分析1 1.2.1. ............................................................................................ ......... 普遍问题1
......... 医院现状3 2.建设目标及原则(7) 2.1. ............................................................................................... ........................ 建设目标7 2.2. ............................................................................................... ........................ 指导思想8 2.2.1. ............................................................................................ ......... 行业标准8 2.2.2. ............................................................................................ ......... 质控原则9 2.2. 3. .................................................................................................. ... 设计思想9 2.3. ............................................................................................... ........................ 管理范围11 2.4. ............................................................................................... ........................ 服务对象11 2.5. ............................................................................................... ........................ 规划原则12
银河航空航天大学 课程设计 (论文) 题目复杂过程控制系统设计与Simulink仿 真 班级 学号 学生姓名 指导教师
目录 0. 前言 (1) 1. 总体方案设计 (2) 2. 三种系统结构和原理 (3) 2.1 串级控制系统 (3) 2.2 前馈控制系统 (3) 2.3 解耦控制系统 (4) 3. 建立Simulink模型 (5) 3.1 串级 (5) 3.2 前馈 (5) 3.3 解耦 (7) 4. 课设小结及进一步思想 (15) 参考文献 (15) 附录设备清单 (16)
复杂过程控制系统设计与Simulink仿真 姬晓龙银河航空航天大学自动化分校 摘要:本文主要针对串级、前馈、解耦三种复杂过程控制系统进行设计,以此来深化对复杂过程控制系统的理解,体会复杂过程控制系统在工业生产中对提高产品产量、质量和生产效率的重要作用。建立Simulink模型,学习在工业过程中进行系统分析和参数整定的方法,为毕业设计对模型进行仿真分析及过程参数整定做准备。 关键字:串级;前馈;解耦;建模;Simulink。 0.前言 单回路控制系统解决了工业过程自动化中的大量的参数定制控制问题,在大多数情况下这种简单系统能满足生产工艺的要求。但随着现代工业生产过程的发展,对产品的产量、质量,对提高生产效率、降耗节能以及环境保护提出了更高的要求,这便使工业生产过程对操作条件要求更加严格、对工艺参数要求更加苛刻,从而对控制系统的精度和功能要求更高。为此,需要在单回路的基础上,采取其它措施,组成比单回路系统“复杂”一些的控制系统,如串级控制(双闭环控制)、前馈控制大滞后系统控制(补偿控制)、比值控制(特殊的多变量控制)、分程与选择控制(非线性切换控制)、多变量解耦控制(多输入多输出解耦控制)等等。从结构上看,这些控制系统由两个以上的回路构成,相比单回路系统要多一个以上的测量变送器或调节器,以便完成复杂的或特殊的控制任务。这类控制系统就称为“复杂过程控制系统”,以区别于单回路系统这样简单的过程控制系统。 计算机仿真是在计算机上建立仿真模型,模拟实际系统随时间变化的过程。通过对过程仿真的分析,得到被仿真系统的动态特性。过程控制系统计算机仿真,为流程工业控制系统的分析、设计、控制、优化和决策提供了依据。同时作为对先进控制策略的一种检验,仿真研究也是必不可少的步骤。控制系统的计算机仿真是一门涉及到控制理论、计算机数学与计算机技术的综合性学科。控制系统仿真是以控制系统的模型为基础,主要用数学模型代替实际控制系统,以计算机为工具,对控制系统进行实验和研究的一种方法。在进行计算机仿真时,十分耗费时间与精力的是编制与修改仿真程序。随着系统规模的越来越大,先进过程控制的出现,就需要行的功能强大的仿真平台Math Works公司为MATLAB提供了控制系统模型图形输入与仿真工具Simulink,这为过程控制系统设计与参数整定的计算与仿真提供了一个强有力的工具,使过程控制系统的设计与整定发生了革命性的变化。
信息发布控制管理软件 解决方案 1.1信息发布系统功能特性 1)系统是基于网络(有线、无线、3G、4G,局域网或互联网)的媒体发布系统。 2)系统管理软件可跨系统(Windows、linux)运行。系统基于B/S架构,管理者可 在网络上,通过浏览器登录系统,经过认证进入管理系统后就可进行相应权限的控制管理。 3)终端播放软件支持LINUX、Window7 、Android、嵌入式LINUX(Sigma8653)。 4)支持触摸导航节目制作。 5)提供专业化的节目制作工具,能够在同一界面实现多种分辨率的同比例放大与缩小, 为使用者提供全局化的布局方式 6)能够实现对接入终端的精确监控,主要包括终端内存、硬盘、cpu,下载进度及播 放内容,并提供图形化的直观展示效果,以方便管理 7)最少支持一机双屏异步或同步显示,方便系统后期扩展; 8)支持文件格式: a)支持多种视音频编码标准和图文格式。如:MPEG1/2/3/4、WMV 、WMA、 Real 、Flash、JPEG、BMP、GIF、TIFF、Word、Excel、PDF、PPT等; b)支持动画flash、SWF,无需转换,直接本地播放; c)支持MMS/ASF/WMV等流媒体格式 9)系统支持中文、英文多语言菜单; 10)支持中英文滚动字幕,多种显示模式供选择 11)支持实时天气、新闻、日期时间、基金股票信息播放 12)具有暂停、插播功能,具有定时下发节目内容,定时播放功能; 13)可发布不同的内容:通知、新闻、形象宣传、实时天气等,以及紧急通知及自然灾 害警告,如台风、地震等相关信息 14)同一播放终端的显示屏可同时发布不同内容形式,可兼容各类信息类型,如视频、 图片、滚动字幕等在同一屏幕分屏、分区播出,更加丰富多样化 15)支持显示屏界面内容分区显示,实时播放音视频、图片、文字、FLASH、PPT等组
自动控制原理及系统仿 真课程设计 学号:1030620227 姓名:李斌 指导老师:胡开明 学院:机械与电子工程学院
2013年11月
目录 一、设计要求 (1) 二、设计报告的要求 (1) 三、题目及要求 (1) (一)自动控制仿真训练 (1) (二)控制方法训练 (19) (三)控制系统的设计 (23) 四、心得体会 (27) 五、参考文献 (28)
自动控制原理及系统仿真课程设计 一:设计要求: 1、 完成给定题目中,要求完成题目的仿真调试,给出仿真程序和图形。 2、 自觉按规定时间进入实验室,做到不迟到,不早退,因事要请假。严格遵守实验室各项规章制度,实验期间保持实验室安静,不得大声喧哗,不得围坐在一起谈与课程设计无关的空话,若违规,则酌情扣分。 3、 课程设计是考查动手能力的基本平台,要求独立设计操作,指导老师只检查运行结果,原则上不对中途故障进行排查。 4、 加大考查力度,每个时间段均进行考勤,计入考勤分数,按照运行的要求给出操作分数。每个人均要全程参与设计,若有1/3时间不到或没有任何运行结果,视为不合格。 二:设计报告的要求: 1.理论分析与设计 2.题目的仿真调试,包括源程序和仿真图形。 3.设计中的心得体会及建议。 三:题目及要求 一)自动控制仿真训练 1.已知两个传递函数分别为:s s x G s x G +=+= 22132)(,131)(
①在MATLAB中分别用传递函数、零极点、和状态空间法表示; MATLAB代码: num=[1] den=[3 1] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) num=[2] den=[3 1 0] G=tf(num,den) [E F]=zero(G) [A B C D]=tf2ss(num,den) 仿真结果: num =2 den =3 1 0 Transfer function: 2 --------- 3 s^2 + s
TFSJ-Ⅱ用电负荷控制系统 一、概述 二、系统构成 三、系统功能 四、技术特点 五、系统通讯 六、控制终端
一、概述 电力负荷管理系统是集计算机技术、数据处理技术、通信技术、自动控制技术于一体的高新技术。充分利用供、负荷信息对提高管理水平、增加经济效益起着至关重要的作用。 当前城乡电网改造的不断深入发展,提高负荷管理自动化水平、提高电网运行的可靠性和安全性是各供电企业急需解决的问题。电力市场的运行除了供电企业制定出完善的管理机制外,还要从技术支持上建立一整套周密的保证体系,以此来作为管理的基础。如何对日益复杂的电网负荷进行调控、对纷繁复杂的电力设备进行科学管理,如何优化电度调度各个环节,使整个系统协调运转,都需要先进的技术作为基础。随着电力营销及需求侧管理技术的发展和管理创新,电力负荷管理系统已成为电力营销与客户服务工作的重要组成部分。 TFSJ-Ⅱ电力负荷控制管理系统主要实现对电力用户的负荷进行监控,实现限电不拉线和公平、合理、有序用电。实现远程抄表、催缴电费、计量监察等功能,为电力营销考核提供准确的数据。同时可以实现预购电,先交钱后用电,完善用电营销管理体制。该系统具有用户用电档案管理、负荷监控、系统管理、线损分析、报表与曲线输出、与其他系统接口功能。 随着电力负荷管理系统功能的日臻完善,不仅能对电力用户的负荷进行监控,实现限电不拉路的基本目标,而且能实现远程抄表、催缴电费、计量监察等功能,还能通过计算机联网实现数据共享。利用负控终端对大用户的用电负荷进行控制,实现有序用电、预购电和计量远程抄表管理。实现系统负荷预测, 为电力市场考核提供准确的数据。该系统具有用户用电档案管理、负荷监控、系统管理、线损分析、报表与曲线输出、与其他系统接口功能。 二、系统构成 系统主要是由负荷控制终端,监控中心计算机及控制管理软件三部分组成。负荷控制终端可以监测用户负荷参数和抄收计量数据,监控中心可通过CDMA/GPRS/GSM或230M无线数传电台实现对电力用户的负荷进行监控,将数据存入数据库,同时可完成对抄表数据的整理、计算、显示等工作。局域网中的终端电脑可通过权限查看中心服务器提供的各种数据及报表。 系统总体结构图如下:
龙源期刊网 https://www.doczj.com/doc/be11594807.html, 基于PLC的控制系统仿真平台的应用 作者:罗卫东 来源:《卷宗》2012年第02期 摘要:仿真软件在PLC设计中占有举足轻重的地位,因为对于PLC系统的新编程序来说实际操作会有很大的风险,PLC的一个错误指令就会造成设备和操作人员不可预计的伤害。在网络上,用户可以安装这种软件,从开放式的资料库中获取所需要的各种功能部件。本文就从仿真软件在网络以及PLC设计中的应用方面来进行探索。 关键词:仿真软件;网络应用;PLC设计 仿真软件是通过建立网络设备和网络链路达到网络应用的标准,这是种通过模拟网络流量就可以获取到网络设计中所需要的相关数据的仿真软件。现阶段,我国工业发展都朝着高速大型化和自动化的方向发展,重大生产设备的运用使得成本日益增高,对运行操作人员素质要求也日益提高。由于仿真系统可以近乎真实的贴近现场实际,同时因为不需要到现场实际节省了很大的操作空间,而快速提高了现场的调试效率,降低了用于调试系统的费用和风险。 一、仿真软件的功能 1、控制程序运行 在PLC设计中仿真软件可以仿真其过程映像的输入输出,在仿真窗口改变运行程序的输入变量的ON/OFF状态进行控制程序,观察输出的变量状态能否符合要求、程序运行能否达到正确运行的目标,起到监视程序运行结果的作用。 2、防止程序出错 在程序运行过程中,仿真软件会通过对程序的检测修改定时器、计数器等。也可以通过程序自动运行或手动复位定时器。这样的检测不仅能够发现程序中的错误和缺陷,还可以使PLC 设计更加的完美。也可以在PLC设计过程中使用软件来改变它的控制过程,而PLC使用者对程序的编写和调试是必不可少的。 3、拥有储存记忆功能 仿真软件模拟是针对软元件、缓冲存储器、外设输入/出的读写。它的这项功能既可以存储PLC内的软元件、存储器的缓冲存储器的数据,并可以将这种数据使用到以后的调试工作中。如果用户想要收集相关网络设备中的某些特殊代码时,可以通过层次上的编程来收集自己感兴趣的网络代码。但在网络信息相对复杂的环境下,使用者的程序必须进行现场调试,而在这个过程中往往会出现一些差错,使用者直接将程序应用到实际操作系统中进行控制调试的话,会被设备带来一定的未知风险。
分层式移动平台运动控制系统设计 为达到移动机器人可以实现对特殊环境进行高速、高精度稳定可靠的运行目标,基于分层式模式的移动机器人运动控制系统能够充分运用PC端,文章制定了PC+STM32的分层式移动控制机器人的总体设计方案,并完成了该运动控制系统的车体位姿求解算法。此外,文章完成了分层式人机界面操作系统设计,对样机进行了实验系统搭建,为移动、监控、自动化工厂等提供平台。就智能移动机器人系统控制的姿态求解进行实验测试,实验结果表明:所研制的远程操作车体具有控制系统可靠稳定、响应迅速、定位准确的特点。 标签:移动机器人;分层式;运动控制系统 Abstract:In order to achieve the goal of high speed,high precision,stability and reliability,the mobile robot can operate in special environment. The motion control system of mobile robot based on hierarchical mode can make full use of PC. In this paper,the overall design scheme of the hierarchical mobile control robot based on PC+STM32 is worked out,and the algorithm for solving the vehicle posture of the motion control system is completed. In addition,the paper completes the design of the layered man-machine interface operating system. The experimental system of the prototype is built,which provides a platform for mobile,monitoring,automation factory and so on. The attitude solution of intelligent mobile robot system is tested experimentally. The experimental results show that the control system is reliable and stable,the response is rapid and the positioning is accurate. Keywords:mobile robot;hierarchical;motion control system 1 智能移動机器人的控制系统体系架构设计 1.1 简介 移动机器人是一类能够通过传感器感知环境和自身状态,实现在有障碍物的环境中面向目标自主运动,从而完成一定功能的机器人系统[6],智能机器人所面向的环境是现实世界中复杂的动态环境,如何利用自身受限的感知和行为能力,引导机器人顺利完成复杂的任务,是智能机器人控制系统需要解决的主要问题[10],但在目前全自主移动机器人还大多处于实验阶段,进入实用的多为半自主移动机器人,通过人的干预在特定环境中执行各种任务,而遥控机器人则完全离不开人的干预[5],移动机器人是目前科学技术发展最活跃的领域之一。 针对移动机器人的结构特点和运动特性,车体结构采用轮式车体,主要包括车轮车架,传动装置和驱动电机等部分。为达到移动机器人可以实现对特殊环境进行高速、高精度稳定可靠的运行目标[9],智能移动机器人需要对操作控制系统、位姿反馈算法等展开阐述。本文主要集中于控制系统的设计,提出一套开放式的分布式运动控制系统,开放式机器人运动控制系统因具有可互操作性、可移
PLC自动升降机控制设计 摘要 自动升降机作为楼群建筑中垂直运行的交通工具已与人们的日常生活密不可分。实际上自动升降机是根据外部呼叫信号以及自身控制规律等运行的,而呼叫是随机的,自动升降机实际上是一个人机交互式的控制系统,单纯用顺序控制或逻辑控制是不能满足控制要求的,本论文采用可编程控制器(PLC)取代微机实现信号集选控制。 PLC可靠性高,程序设计方便灵活,抗干扰能力强、运行稳定、可靠性高等特点,所以现在的自动升降机控制系统广泛采用可编程控制器(PLC)来实现。在自动升降机控制系统中,采用PLC构成的系统,具有可靠性高,故障率低,维修方便等优点。本系统设计就是采用三菱PLC(FX-1s)作为自动升降机模型的控制装置。 实验证明,该系统能较直观地描述自动升降机的结构,将自动升降机的机械传动与电气控制有机地结合起来,较全面地演示自动升降机的使用功能;通过修改PLC控制程序,可在该模型上,实现多种自动升降机运行、控制方式,不仅可以作为实验设备,也可为自动升降机的科研提供了一个模拟平台。 关键词 PLC 自动升降机三菱PLC
Abstract The electric elevator is the means of transportation daily life interwovenness that the perpendicularity runs in building group building already with people. That the electric elevator is that the call sign waits to work according to the outside as well as oneself controls law in fact, but call for is random , the electric elevator is that one people machine is each other dyadic in fact control system , the selections controlling the be to be able to not be satisfied with controlling call for's , this thesis exclusively with sequential control or the logic adopt programming controller (PLC) to substitute PC realizing signal collection controls. PLC reliability height, programming goes to the lavatory nimbly , the anti-interference ability strong , runs stability , the advanced characteristic of reliability, adopt to come to come true programming controller (PLC) therefore lift control now system is broad. In electric elevator navar, adopt the system that PLC composes , have reliability height , malfunction rates low, be maintained waiting for merit conveniently. System designs the control device being to adopt Mitsubishi PLC (FX-1s) to be the electric elevator model. Demonstration , that system can describe the electric elevator structure more penetrating , combine electric elevator mechanical drive electric control organically demonstrate the electric elevator sigmatism function more all-round; By revising PLC under the control of procedure, may on that model, realize various electric elevator operation, under the control of way, not only being able to be experiment equipment, also may simulate platform for the electric elevator scientific research has provided one KEY WORD PLC Electric elevator Mitsubishi PLC
船舶稳定平台解决方案 陀螺稳定平台(gyroscope-stabilized platform)利用陀螺仪特性保持平台台体方位稳定的装置。简称陀螺平台、惯性平台。用来测量运动载体姿态,并为测量载体线加速度建立参考坐标系,或用于稳定载体上的某些设备。它是导弹、航天器、飞机和舰船等的惯性制导系统和惯性导航系统的主要装置。 稳定平台作为一种安放在运动物体上的设备,具有隔离运动物体扰动的功能。稳定平台在航空航天、工业控制、军用及商用船舶中都有比较广泛的用途,例如航拍、舰载导弹发射台、船载卫星接收天线等。船舶上工作面或者平台姿态检测,船载天线稳定平台系统,会应用倾角传感器定时(较长时间)读取数值,通过计算后,对稳定平台进行校正。平台的实际运动由单片机控制外部机械装置以达到对稳定水平平台进行修正,以保证其始终处于水平状态。某些倾角传感器作为船体液压调平系统中的反馈元件,提供高精度的倾角信号。既可用于水下钻进也可用于水下开采等。 在国外,陀螺稳定跟踪装置被广泛应用于地基、车载、舰载、机载、弹载以及各种航天设备中。20世纪40年代末,为了减少车体振动对行进间射击的影响,在坦克上开始安装火炮稳定器,从50年代起,双稳定器在坦克中得到了广泛的应用。在英、美等国的先进武器系统中,基于微惯性传感器的稳定跟踪平台得到了广泛的应用,如美国的M1坦克、英国“挑战者”坦克、俄罗斯T-82坦克、英国“标枪”导弹海上发射平台和“海枭”船用红外跟踪稳定平台等,都采用了不同类型的稳定跟踪平台。美国海军采用BEI电子公司生产的QRS-10型石英音叉陀螺,研制出WSC-6型卫星通讯系统的舰载天线稳定系统,工作12万小时尚未出现故障;Honeywell公司以红外传感器平台稳定为应用背景,研制的以GG1320环形激光陀螺为基础的惯性姿态控制装置,很好的满足了稳瞄跟踪系统的要求。美军配装的Honeywell公司采用激光陀螺技术研制的自行榴弹炮组件式方位位置惯性系统(MAPS6000) ,在工作时可连续提供高精度的方位基准、高程、纵摇、横摇、角速率、经度和纬度输出,性能大大高于美军MAPS系统规范的要求。在导弹制导方面,俄罗斯的X-29T、美国的“幼畜”AGM-65、以色列的“突眼”等成像制导导引头中,都采用了陀螺稳定跟踪平台。在机载设备中,陀螺稳定平台在机载光-电火控系统和机载光电侦察平台中也得到极其广泛的应用,美国、以色列、加拿大、南非、法国、英国、俄罗斯等国家都已研制出多种型号产品装备部队。如以色列的ESP-600C型无人机载光电侦察平台采用两轴平台,其方位转动范围360o×N、俯仰+10o----10o、最大角速度50o/s、最大角加速度60o/s2,其稳定精度达到15μrad,所达精度代表了国际先进水平。 国内对陀螺稳定平台的研究起步较晚,20世纪80年代开始研制瞄准具稳定平台,而90 年代初才开始陀螺稳定平台的研制。虽有不少单位,如北京电子3所、长春光机所、中科院成都光电所、西安应用光学研究所、华中光电技术研究所和清华大学等都在开展该应用领域的研究工作,但在稳定跟踪平台技术的研究上与国外相比仍有较大差距,由于惯性元件的技术不过关,成本较高,致使该项技术的研究始终没有取得突破性的进展。 一、船用红外/可见光陀螺稳定平台 近年来,随着精密机械、电子技术、数字信号处理技术和模式识别技术的飞速发展,陀螺伺服稳定跟踪系统的性能也有了很大的提高。陀螺伺服稳定跟踪系统,其主要任务是完成
实验总要求 1、封面必须注明实验名称、实验时间和实验地点,实验人员班级、学号(全号)和姓名等。 2、内容方面:注明实验所用设备、仪器及实验步骤方法;记录清楚实验所得的原始数据和图像,并按实验要求绘制相关图表、曲线或计算相关数据;认真分析所得实验结果,得出明确实验结论。 3、图形可以打印出来并剪贴上去,文字必须用标准试验纸手写。
实验一MATLAB绘图基础 一、实验目的 了解MATLAB常用命令和常见的内建函数使用。 熟悉矩阵基本运算以及点运算。 掌握MATLAB绘图的基本操作:向量初始化、向量基本运算、绘图命令plot,plot3,mesh,surf 使用、绘制多个图形的方法。 二、实验内容 建立并执行M文件multi_plot.m,使之画出如图的曲线。
三、实验方法(参考程序) 四、实验要求 1.分析给出的MA TLAB参考程序,理解MA TLAB程序设计的思维方法及其结构。 2.添加或更改程序中的指令和参数,预想其效果并验证,并对各语句做出详细注释。对不 熟悉的指令可通过HELP查看帮助文件了解其使用方法。达到熟悉MA TLAB画图操作的目的。 3.总结MATLAB中常用指令的作用及其调用格式。 五、实验思考 1、实现同时画出多图还有其它方法,请思考怎样实现,并给出一种实现方法。 (参考程序如下)
%hold on;hold off命令
2、思考三维曲线(plot3)与曲面(mesh, surf)的用法,(1)绘制参数方程 233,)3cos(,)3sin()(t z e t t y e t t t x t t ===--的三维曲线;(2)绘制二元函数 xy y x e x x y x f z ----==22)2(),(2 ,在XOY 平面内选择一个区域(-3:0.1:3,-2:0.1:2),然后绘 制出其三维表面图形。(以下给出PLOT3和SURF 的示例)
1 系统控制管理参数 我们可以将无线参数按照许多方法分类,为了便于叙述,可以按照传送的系统消息的内容进行分类,对于在同一个系统消息里发送的参数一起描述 1.1 网络号码、地址、识别参数 GSM网络中,移动台没有固定的位置,移动用户只要在服务区域内,无论移动到何处都应该可以顺利的识别网络以及它的小区配置情况以便实现位置更新、越区切换和自动漫游等性能。在GSM系统中,对每个移动用户都分配了一个唯一的国际移动用户识别码IMSI,IMSI 由MCC(移动国家码)、MNC(移动网号)、MSIN(移动用户识别码)组成。同样,对于在全球范围内的每一个小区,GSM也都规定了唯一的一个编号与之相对应,以达到以下目的: ? 移动台可以正确识别网络,使之在任何环境下可以选择接入合适的网络 ? 使网络实时了解移动台的位置,开展业务 ? 使移动台可以向网络正确报告邻小区状况,进行切换 网络的识别参数主要有位置区识别(LAI)小区全球识别(CGI)和基站识 别码(BSCI)几项。 位置区识别(LAI) 8 7 6 5 4 3 2 1 Location Area Identification IEI octet 1 octet 2 octet 3 octet 4 octet 5 octet 6 MCC digit 2 MCC digit 1 1 1 1 1 MCC digit 3 MNC digit 2 MNC digit 1 LAC LAC(continued) Location Area Identification information element 位置区识别由以下几部分组成: Structure of Location Area Identification ? MCC(mobile country code)--移动国家号,由3位数字组成,编码范围为十进制的000-999,与IMSI的MCC相同,在这儿表示GSM PLMN所属的国家,MCC的资源由国际电联(ITU)统一分配,中国的MCC为460。 ? MNC(mobile network code)--移动网号,与IMSI中的MNC一样由2个数字组成,编码范围为十进制的00-99,在这儿识别用户归属的移动通信网(PLMN),因为一个国家可能由多于一个的GSM PLMN 组成,MNC由国家有关电信管理部门统一分配,目前中国有两个GSM网络,中国电信与中国联通的MNC分别为00与01。 ? LAC(location area code)--位置区号,用于识别GSM移动通信网中的一个位置区,最多为2个字节长度的16进制编码,其中“0000”“FFFF”为保留值,一个位置区可以包含一个或多个小区。其大小由运行部门根据各个地区的PCH负荷情况及信令链路负荷情况去确定调整位置区的大小 小区识别(CI)全球小区识别(CGI) ? 小区识别CI(cell identity)用来唯一的表示PLMN中的每一个小区,CI由两个字节组
(19)中华人民共和国国家知识产权局 (12)发明专利申请 (10)申请公布号 (43)申请公布日 (21)申请号 201910155978.8 (22)申请日 2019.03.01 (71)申请人 武汉船用机械有限责任公司 地址 430084 湖北省武汉市青山区武东街 九号 (72)发明人 刘利明 田崇兴 江志钢 刘杰 阮长松 徐潇 (74)专利代理机构 北京三高永信知识产权代理 有限责任公司 11138 代理人 徐立 (51)Int.Cl. F15B 11/17(2006.01) E02B 17/08(2006.01) (54)发明名称 升降平台的液压控制系统 (57)摘要 本发明公开了一种升降平台的液压控制系 统,涉及升降平台领域。该液压控制系统包括油 箱、插销子系统、第一升降油缸子系统和第二升 降油缸子系统,第二升降油缸子系统的结构与第 一升降油缸子系统的结构相同,如果第一升降油 缸子系统故障导致第一升降油缸无法伸缩,则可 以关闭第一升降油缸子系统中的升降油缸换向 阀,使第一升降油缸始终保持固定长度,第一动 环梁就相当于变为了定环梁,第二动环梁还可以 继续带动升降平台升降。如果第二升降油缸子系 统故障导致第二升降油缸无法伸缩,则可以由第 一动环梁继续带动升降平台升降。只有当第一升 降油缸子系统和第二升降油缸子系统都故障时 升降平台才无法工作,从而提高量升降平台工作 的可靠性。权利要求书2页 说明书7页 附图4页CN 109973449 A 2019.07.05 C N 109973449 A
权 利 要 求 书1/2页CN 109973449 A 1.一种升降平台的液压控制系统,其特征在于,所述升降平台具有连接第一动环梁和固桩架的多个第一升降油缸、连接第二动环梁和所述固桩架的多个第二升降油缸,所述第一动环梁上和所述第二动环梁上均具有用于与桩腿上的插销孔配合的插销和驱动所述插销的插销油缸,所述液压控制系统包括油箱(40)、插销子系统、第一升降油缸子系统(50)和第二升降油缸子系统, 所述第一升降油缸子系统(50)包括第一液压泵(51)、第一换向阀(52)、第二换向阀(53)、第一泄压阀组(54)、第二泄压阀组(55)、升降油缸换向阀(56), 所述第一液压泵(51)的进油口与所述油箱(40)连通,所述第一液压泵(51)的出油口与所述第一换向阀(52)的第一油口连通,所述第一换向阀(52)的第二油口与所述升降油缸换向阀(56)的第一油口连通,所述第一液压泵(51)的出油口还与所述第二换向阀(53)的第一油口连通,所述第一泄压阀组(54)连通所述第一换向阀(52)的第二油口和所述油箱(40),所述第二泄压阀组(55)连通所述第二换向阀(53)的第二油口和所述油箱(40),所述第二升降油缸子系统的结构与所述第一升降油缸子系统(50)的结构相同, 所述第一升降油缸子系统(50)的所述升降油缸换向阀(56)的第二油口与所述第一升降油缸(31)的无杆腔连通,所述第一升降油缸子系统(50)的所述第二换向阀(53)的第二油口与所述第一升降油缸(31)的有杆腔连通, 所述第二升降油缸子系统的所述升降油缸换向阀(56)的第二油口与所述第二升降油缸(32)的无杆腔连通,所述第二升降油缸子系统的所述第二换向阀(53)的第二油口与所述第二升降油缸(32)的有杆腔连通, 所述插销子系统包括第二液压泵(61)、第一插销换向阀(62)、第二插销换向阀(63),所述第二液压泵(61)的进油口与所述油箱(40)连通,所述第二液压泵(61)的出油口与所述第一插销换向阀(62)的第一油口连通,所述第一插销换向阀(62)的第二油口与所述第一动环梁上的插销油缸的无杆腔连通,所述第一插销换向阀(62)的第三油口与所述第一动环梁上的插销油缸的有杆腔连通,所述第一插销换向阀(62)的第四油口与所述油箱(40)连通,所述第二液压泵(61)的出油口与所述第二插销换向阀(63)的第一油口连通,所述第二插销换向阀(63)的第二油口与所述第二动环梁上的插销油缸的无杆腔连通,所述第二插销换向阀(63)的第三油口与所述第二动环梁上的插销油缸的有杆腔连通,所述第二插销换向阀(63)的第四油口与所述油箱(40)连通。 2.根据权利要求1所述的液压控制系统,其特征在于,所述第一泄压阀组(54)包括第三换向阀(541)、第一背压阀(542)和第二背压阀(543), 所述第三换向阀(541)的第二油口与所述第一背压阀(542)的先导油口和进油口连通,所述第一背压阀(542)的出油口与所述第三换向阀(541)的第三油口连通,所述第三换向阀(541)的第四油口与所述油箱(40)连通,所述第三换向阀(541)的第二油口与所述第二背压阀(543)的出油口连通,所述第二背压阀(543)的先导油口和进油口与所述第三换向阀(541)的第三油口连通, 所述第二泄压阀组(55)的结构与所述第一泄压阀组(54)的结构相同,所述第一泄压阀组(54)的所述第三换向阀(541)的第一油口与所述第一换向阀(52)的第二油口连通,所述第二泄压阀组(55)的所述第三换向阀(541)的第一油口与所述第二换向阀(53)的第二油口连通。 2