第31卷第1期 辽宁石油化工大学学报 Vo l.31 No.1 2011年3月JO U RN A L O F L IA O NI NG SH IH U A U N IV ER SI T Y M ar.2011
文章编号:1672-6952(2011)01-0088-04
基于A RM A模型的中国城乡收入差距的预测
陈德艳
(辽宁石油化工大学理学院,辽宁抚顺113001)
摘 要: 随着我国经济快速增长,中国居民收入水平显著提高,但城乡收入差距水平也在不断加大,收入不均状况日益严重,引起社会的广泛关注。以我国1978 2008年的城乡人均收入差距数据为基础,根据其趋势图进行曲线拟合,然后对其残差序列建立时间序列的AR M A模型,并进行了模型参数的分析、识别、估计和检验,建立了适合我国城乡人均收入差距预测的模型。建模过程表明A RM A模型具有简单快捷,预测精度高,适应实际需要的特点;
同时预测结果也说明我国城乡居民收入差距在不断扩大,国家应采取积极对策加以控制,加大农业投入,保障农民权益,进而增加农民收入,维护社会稳定。
关键词: A RM A模型; 城乡收入差距; 预测
中图分类号:F12 文献标识码:A doi:10.3696/j.issn.1672-6952.2011.01.024
Prediction of Chinese U rban and Rural Income Gap Based on A RM A M odel
CH EN De-y an
(Colleg e of Sciences,Liaoning Shihua Univers ity,Fushun L iaoning113001,P.R.China)
Received21S ep tember2010;rev is ed20O ctober2010;accep ted5N ov ember2010
Abstract: W ith the r apid dev elo pment o f the eco no mic,the income of Chinese residents is incr eased sig nificantly,how ever the level of urban-rural income gap has a lso been increasing.Inco me inequality is g ro wing and it has already aro used ex tensiv e attent ion of the who le society.Based on the data o f inco me ga p per ca pit a betw een rura l and urban a reas fro m1978-2008in China,it fits the r eg r essiv e curv e by tr end gr aph and establishes an time ser ies model of A RM A by the r esidual sequence, fur thermor e analysis,identification,estimat ion and t est of the model par ameters wer e conducted to establish a suit able fo recast model of China's ur ban-r ural income gap.T he outcome pr ov es that the model takes o n the tr aits of simple shortcut,hig h forecasting pr ecision and adaptatio n to actual needs.T he pr ediction indicates t hat China's urban-r ural income ga p is widening, the state should take po sitiv e measures to contro l the situat ion.State sho uld increase investment in ag ricultur e,pr otect the interests of farmer s and raise the income of peasant s to maintain social stability.
Key words: AR M A mo del;U r ban-r ur al income g ap;Fo recast
Co rr esponding author.Tel.:+86-138********;e-mail:chendy0413@https://www.doczj.com/doc/b98721317.html,
自从改革开放以来,城乡发展不平衡情况日益显著,中国城乡收入差距水平在持续扩大,我国已经成为世界上收入不等状况较为严重的国家之一。随着农业、农村、农民等各种问题的不断凸显,缩小城乡差距,协调城乡发展,增加农民收入已经刻不容缓。同时国家也出台了许多新的政策措施,这些也都会影响到我国城乡收入差距未来的走势。随着国家支农力度的加大,相信我国城乡收入差距将会进一步缩小,国民收入将越来越趋于均衡。本文从实
收稿日期:2010-09-21
作者简介:陈德艳(1977-),女(蒙),辽宁丹东市,讲师,硕士。证角度出发,以1978-2008年的统计数据为研究对象,运用ARMA时间序列模型,对中国城乡收入差距的发展趋势进行了预测和分析,并提出相关建议。
1 ARM A模型
ARM A模型是有限参数线性模型,它是一种确定型时间序列模型预测方法,适于短期预测,其预测精度高于简单模型,其理论在平稳时间序列分析中已经十分成熟,同时在各个领域的应用也十分广泛[1]。建立ARMA模型主要是找出它的线性模型,它有以下三种形式:
1.1 自回归AR(p)模型
p阶自回归A R(p)模型的数学方程如下:
y t=c+ 1y t-1+ 2y t-2+ + p y t-p+ t
其中,c为常数;p为自回归模型的阶数; 1, 2, , p为自回归模型的系数; t为均值是0,方差是 2的白噪声。AR(p)模型主要是通过时间序列变量的自身历史数据观测值和当前随机扰动来反映预测目标的影响作用。
1.2 移动平均M A(q)模型
q阶移动平均M A(q)模型的数学方程如下:
y t= + t+ 1 t-1+ 2 t-2+ + q t-q
其中, 为常数;q为移动平均模型的阶数; 1, 2, , q为移动平均模型的系数;M A(q)模型主要是用各个时期的随机干扰的线性组合进行预测。
1.3 自回归移动平均ARM A(p,q)模型
将自回归与移动平均模型结合得到的自回归移动平均ARM A(p,q)模型的数学方程如下:
y t=c+ 1y t-1+ 2y t-2+ + p y t-p+ t+ 1 t-1 + 2 t-2+ + q t-q
2 建模与预测
2.1 我国城乡居民人均收入差距序列特点
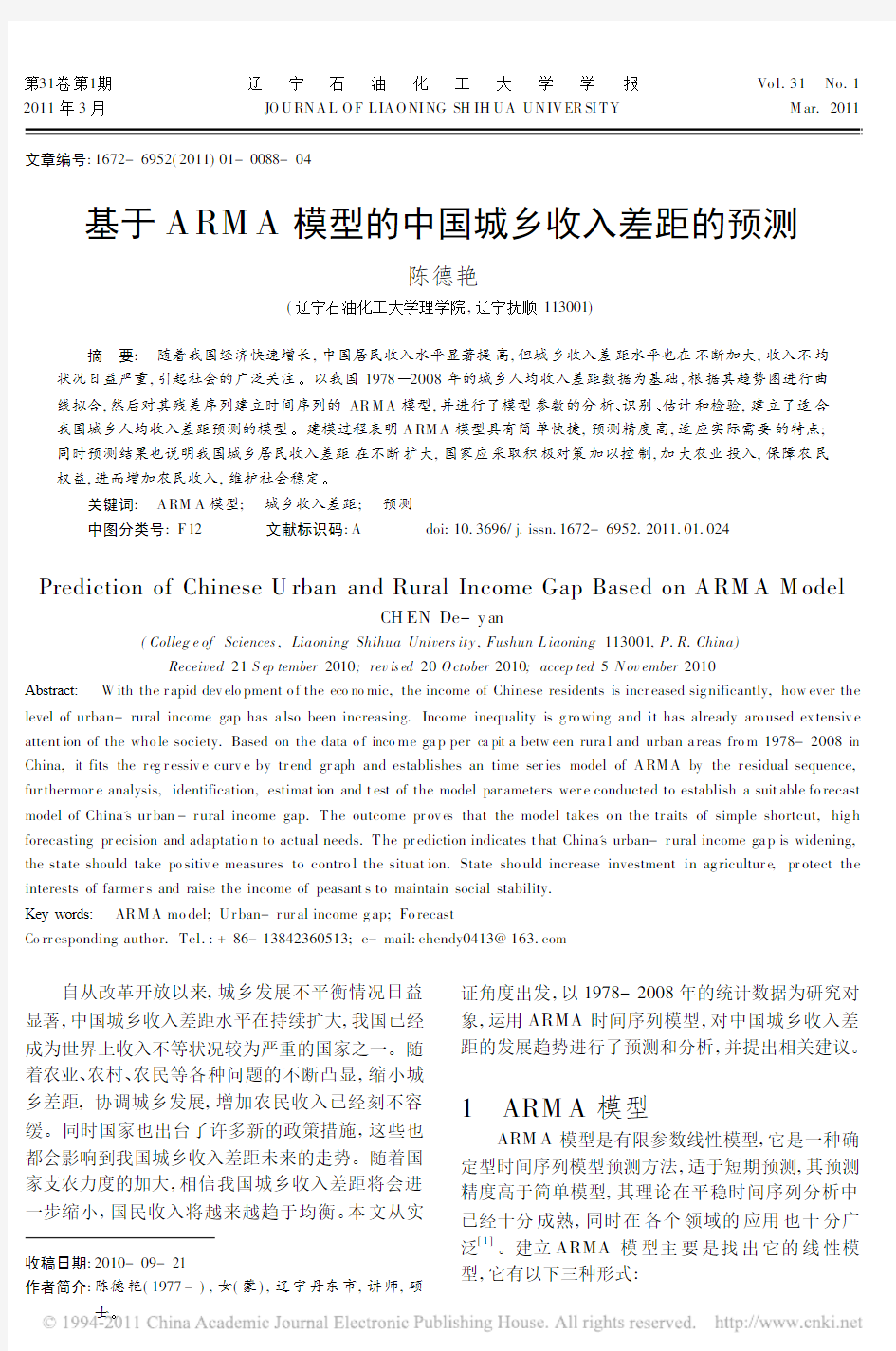
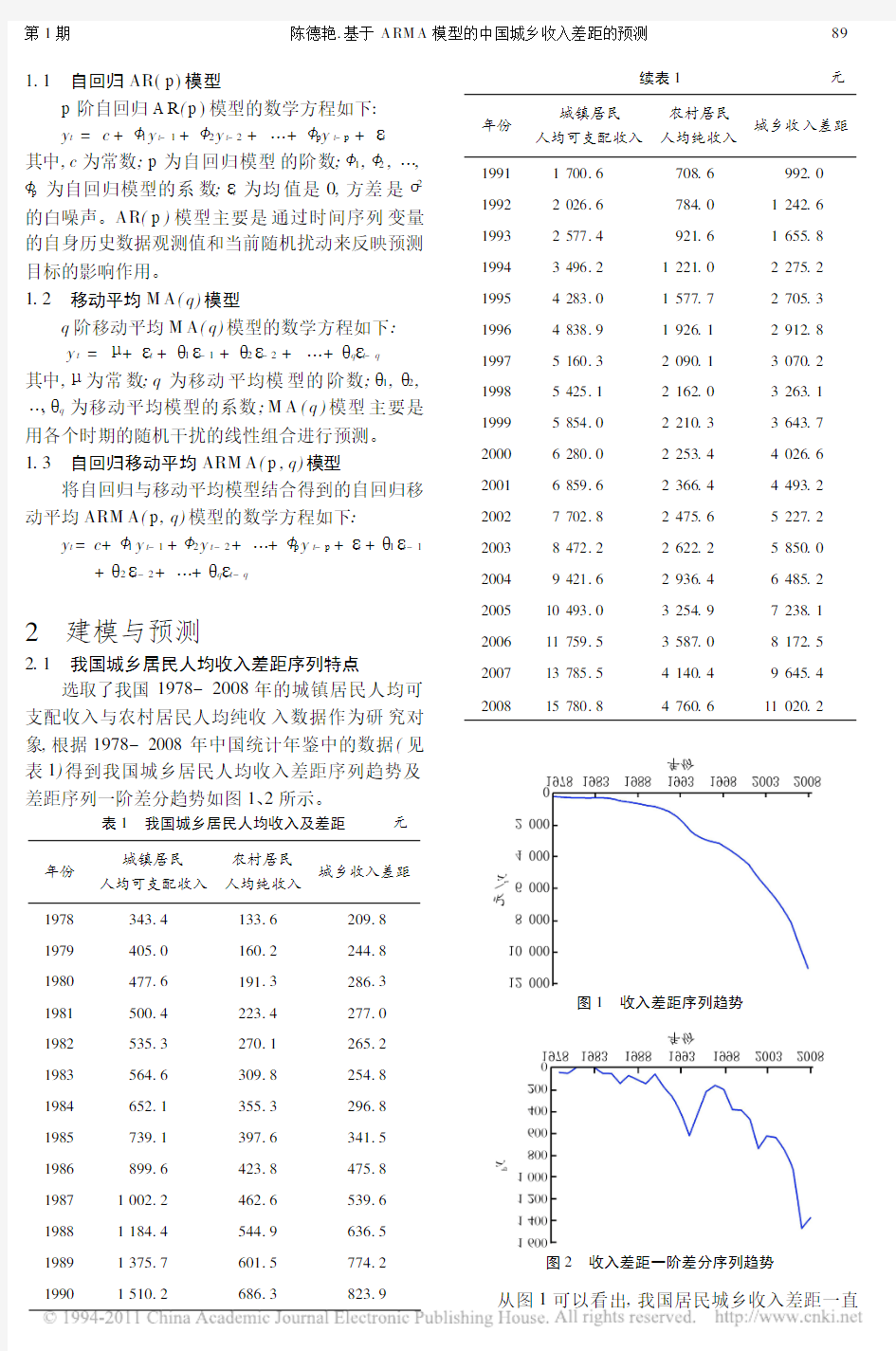
选取了我国1978-2008年的城镇居民人均可支配收入与农村居民人均纯收入数据作为研究对象,根据1978-2008年中国统计年鉴中的数据(见表1)得到我国城乡居民人均收入差距序列趋势及差距序列一阶差分趋势如图1、2所示。
表1 我国城乡居民人均收入及差距元
年份
城镇居民
人均可支配收入
农村居民
人均纯收入
城乡收入差距
1978343.4133.6209.8 1979405.0160.2244.8 1980477.6191.3286.3 1981500.4223.4277.0 1982535.3270.1265.2 1983564.6309.8254.8 1984652.1355.3296.8 1985739.1397.6341.5 1986899.6423.8475.8 19871002.2462.6539.6 19881184.4544.9636.5 19891375.7601.5774.2 19901510.2686.3823.9
续表1元年份
城镇居民
人均可支配收入
农村居民
人均纯收入
城乡收入差距19911700.6708.6992.0 19922026.6784.01242.6 19932577.4921.61655.8 19943496.21221.02275.2 19954283.01577.72705.3 19964838.91926.12912.8 19975160.32090.13070.2 19985425.12162.03263.1 19995854.02210.33643.7 20006280.02253.44026.6 20016859.62366.44493.2 20027702.82475.65227.2 20038472.22622.25850.0 20049421.62936.46485.2 200510493.03254.97238.1 200611759.53587.08172.5 200713785.54140.49645.4 200815780.84760.611020.
2
图1
收入差距序列趋势
图2 收入差距一阶差分序列趋势
可以看出,我国居民城乡收入差距一直
89第1期 陈德艳.基于A RM A模型的中国城乡收入差距的预测
呈上升趋势,近似为一条光滑递增曲线,其对应的模型含有明显的趋势项。从图1和图2还可看出,二者都具有明显的非平稳特征,同时更为准确的A DF 和PP检验结果(见表2、3)也可知两个序列均不平稳。
表2 城乡居民人均收入差距序列的A DF和PP检验结果
A D F p
不同置信水平的概率临界值1%5%10%
2.7260 1.0000-
3.6793-2.9677-2.6229
PP p
不同置信水平的概率临界值1%5%10%
10.65501.0000-3.6701-2.9677-2.6229
表3 城乡居民人均收入差距一阶差分序列的
A DF和PP检验结果
A DF p
不同置信水平的概率临界值1%5%10%
1.78140.9994-3.7529-
2.9980-2.6387
PP p
不同置信水平的概率临界值1%5%10%
1.75730.9995-3.6793-
2.9677-2.6229
2.2 人均收入差距序列的ARM A模型
由上可知虽然我国城乡居民人均收入差距一阶差分序列的状况有所缓和,但是仍不平稳,而高价差分方法存在明显缺点,它虽能消除某些序列的长期趋势而易于建模,但同时也消除了原序列的长期特征而造成信息损失[2-4]。观察原序列的趋势图可以看出具有明显的趋势变化,所以可以考虑先拟合趋势项,再拟合ARMA模型。综合考虑二次函数、对数函数等,最后选取了二次函数来拟合趋势项,其拟合结果如下:
y t=599.5747-153.2807t+14.9891t2
其中,可决系数为0.9918,调整可决系数为0.9913,方程系数在0.01
的显著性水平下都显著,拟合结果还是比较好的。但是从拟合一元二次方程的残差图(如图3所示)和残差序列的自相关图、偏自相关图可以看出,残差序列虽趋于平稳,但是还不是白噪声,残差序列存在相关性,不能通过卡方检验,残差序列不是独立的,故还应考虑建立残差序列的ARMA模型[5-6]。
图3 拟合一元二次方程的残差图
所以本文最终的模型形式为:
y t=c+bt+at2+ 1y t-1+ 2y t-2+ + p y t-p + t+ 1 t-1+ 2 t-2+ + q t-q
其中,残差的拟合尝试了AR(1)、MA(1)、ARMA(1,1)和AR(1,2)几个模型,再次拟合后的残差都为平稳白噪声,满足建模要求。根据A I C、S C最小的原则,综合考虑各种因素,最后确定了M A(1)模型。模型拟合的具体结果见表4、5。
表4 4个模型的参数估计结果
模型a b c 1 1 2
A R(1)15.0067-161.2186715.20960.5643
M A(1)14.0079-129.0666489.8175 0.9307
A RM A(1,1)13.8245-125.0644489.67300.11080.9060
A RM A(1,2)15.3048-176.8730854.66460.6574-0.0379-0.8707
表5 4个模型的检验结果
模型调整后的可决系数A IC SC回归系数显著性F
A R(1)0.994113.875814.0626b、 1不显著1636.140
M A(1)0.994613.780313.9654显著1843.003
A R M A(1,1)0.994213.883914.1174 1不显著1251.452
A R M A(1,2)0.994713.814014.0942 1不显著1102.475
90 辽宁石油化工大学学报 第31
卷
我国城乡居民人均收入差距的ARM A模型的最终形式为:
y t=489.8175-129.0666t+14.0079t2+ t+
0.9307 t-1
2.3 ARM A模型的预测分析
利用2.2节得到的最终模型对我国2009-2012年的城乡居民人均收入差距进行短期预测,所得的预测数据(见表6)、预测趋势如图4所示。
表6 我国2009-2012年城乡居民人均收入差距预测结果年份2009211020112012
预测值/元11485.2112294.6813132.1513997.
59
图4 预测趋势图
从预测残差图可以看出,预测曲线与实际曲线拟合的较好,说明模型的拟合结果可靠性较高。结果表明我国城乡收入差距将在未来的几年内进一步拉大,2009将达到11485.21元,2010年将达到12294.68元,2011年将达到13132.15,而2012年将达到13997.59元,这说明我国城乡收入差距大,地区发展不平衡问题日趋严重。
3 结束语
本文以我国1978-2008年的人均收入差距数据为基础,利用Ev iew s软件分析了我国居民城乡收入差距的数据的变化特征,给出了基于ARM A模型的提取趋势项的时间序列分析模型,并对我国居民城乡收入差距的未来发展趋势进行了短期预测。据有关数据显示2009年我国城镇居民人均可支配收入达到17175元,而农村居民人均纯收入也达到5177元,即城乡收入差距约为11998元,与模型中结果相比较,误差为4.27%,数据误差较小,与实际值大体上保持一致,说明模型的可靠性较高。随着预测结果的显示,我国居民城乡收入差距将进一步扩大,同时也反映了我国收入差距悬殊,城乡发展不平衡问题已经迫在眉睫,需要相关政策和措施的执行来缓和这一问题,从而促进各个地区的均衡发展。对此,国家应进一步完善增加农民收入的政策,加大对农业的投入,改善农民的生活环境。只有国家采取把解决 三农 问题作为全党工作重中之重的战略[7-8]。国家的政策导向和政策实施紧密结合,只有这样,我国未来的城乡收入差距才有可能缩小。
参考文献
[1] 何书元.应用时间序列分析[M].北京:北京大学出版社,2003.
[2] 王燕.应用时间序列分析[M].北京:中国人民大学出版社,2005.
[3] Brockwell P J,Dav is R A.Intro ductio n to time series and fo recasting[M].Beijing:Po sts and telecom press,2009.
[4] 易丹辉.数据分析与Eview s应用[M].北京:中国统计出版社,2002.
[5] 高铁梅.计量经济分析方法与建模:Ev iews应用及实例[M].北京:清华大学出版社,2005.
[6] 张大维,刘博,刘琪.Ev iew s数据统计与分析教程[M].北京:清华大学出版社,2009.
[7] 李云娥,周云波.中国城乡收入差距未来发展趋势的预测[J].山西财经大学学报,2007,29(10):14-18.
[8] 钱光明,陈德艳.非财务指标对我国上市公司财务预警的影响[J].辽宁石油化工大学学报,2010,30(2):89-92.
(Ed.:ZW,Z)91
第1期 陈德艳.基于A RM A模型的中国城乡收入差距的预测
城市交通拥阻的分析与治理 摘要 随着经济的高速发展和城市化进程的加快,机动车拥有量急剧增加。城市道路交通拥堵问题成为困扰世界各大城市的主要社会问题之一,严重影响着城市的可持续发展和人们的日常工作与生活。快速、准确地发现路网中发生的交通拥堵,并估计出拥挤在未来一段时间内的扩散范围和持续时间,对于制定合理有效的交通拥挤疏导策略具有重要意义。 本文通过调查洛阳市中州中路与定鼎路交叉口车流量与红绿灯的设置等情况,发现此路口南北方向的车辆主要是由关林与洛阳站方向的往返车辆,东西方向的车辆主要是由中央百货大楼与老城方向的往返车辆,且南北方向的车流量大于东西方向的车流量。 模型一,通过我们的调查发现,造成此路口交通拥堵的原因之一是黄灯时间较短,黄灯时间只有3秒,这样会造成有些车辆因来不及停车而越过十字路口的停车线, 又由于红灯亮了而过不了路口, 故而造成交通混乱。针对此问题,我们在力学与动力学原理的基础上,提出一种调整黄灯时间的模型,利用微分方程列出黄灯时间的求解公式,并计算出黄灯闪亮的最佳时间为7秒。 模型二,道路的增长速度跟不上车辆增长速度,这就导致了车辆静止平均密度逐年增大,结果花费了大量人力物力财力修路架桥,但换来的不是交通顺畅,而是越来越严重的交通拥挤。针对此现象,我们以交通工具为研究对象,运用线性规划方法并结合LINGO软件,得出人们出行选用自行车和大型机动车有利于缓解当前交通拥堵现象。 模型三,为了使交通部门有充分的时间来预防交通拥堵,应该在交通流高峰到来之前做出预测, 进而采取及时的措施并通过交通控制系统削减交通流高峰、避免拥堵的发生,我们采用径向基函数预测功能的神经网络[5],对十字路口的车流量进行实时预测,应用MATLAB软件编程[4]预测出交通高峰期可能通过每个路口的车流量,从而可以给交通部门提供数据,让他们有更充分的时间预防交通拥堵的发生。 关键词:微分方程;线性规划;神经网络; LINGO; MATLAB
MATLAB模型预测控制工具箱函数 8.2 系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2 模型建立与转换函数 8.2.1 模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型; ⑤MPC传递函数模型。
在上述5种模型格式中,前两种模型格式是MATLAB通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC状态空间模型和MPC传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC状态空间模型之间的转换 MPC状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动和采样周期的描述信息,函数ss2mod()和mod2ss()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC状态空间模型函数ss2mod() 该函数的调用格式为 pmod= ss2mod(A,B,C,D) pmod= ss2mod(A,B,C,D,minfo) pmod= ss2mod(A,B,C,D,minfo,x0,u0,y0,f0) 式中,A, B, C, D为通用状态空间矩阵; minfo为构成MPC状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆minfo(1)=dt,系统采样周期,默认值为1; ◆minfo(2)=n,系统阶次,默认值为系统矩阵A的阶次; ◆minfo(3)=nu,受控输入的个数,默认值为系统输入的维数; ◆minfo(4)=nd,测量扰的数目,默认值为0; ◆minfo(5)=nw,未测量扰动的数目,默认值为0; ◆minfo(6)=nym,测量输出的数目,默认值系统输出的维数; ◆minfo(7)=nyu,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o,则取默认值。 x0, u0, y0, f0为线性化条件,默认值均为0; pmod为系统的MPC状态空间模型格式。 例8-5将如下以传递函数表示的系统模型转换为MPC状态空间模型。 解:MATLAB命令如下:
交通流预测方法 随着社会经济和交通运输业的不断发展,交通拥挤等交通问题越来越凸现出来,成了全球共同关注的问题。那么对于交通流的预测不仅是城市交通控制与诱导的基础,还是解决道路拥堵问题的关键。如果能精确的预测交通网中各个支路上的汽车流量,那么我们可以运用规划方法对交通流进行合理的优化,从而使得道路的利用率达到最大,也可以解决部分拥堵问题。在新建道路的前期也需要对兴建道路的车流量进行一个长期的交通预测,从而对道路的经济效益进行评估,对论证道路修建的可行性研究提供依据。由此可见,对交通流的预测是必要的,在本课题中我对四公里立交车流作一个最优函数估计,旨在对四公里立交的车流进行精确预测。 交通流理论是研究交通随时间和空间变化规律的模型和方法体系。多年来交通流理论有了较快的发展,众多学者在这一研究方向做出了许多优秀的成果,将交通流理论运用于交通运输工程的许多研究领域,如交通规划、交通控制、道路与交通设施设计等。 预测方法从大体上可分为定性预测与定量预测。定性预测中主要有相关类比法、德尔菲法等;定性预测则分为因果分析、趋势分析智能模型。因果分析主要方法有线性回归、非线性回归等模型;趋势分析主要有时间序列模型、趋势回归模型等;智能模型主要包括神经网络模型和非参数回归模型。 短期交通流的预测方法较早期的有:自回归模型(AR)、滑动平均模型(MA)、自回归滑动平均模型(ARMA)、历史平均模型(HA)和Box-Cox法等,随着该领域的发展,预测方法不断趋于精确,在大批学者的共同努力下出现了许多更加复杂、精度更高的预测模型。大体来说可分为两类:一类是以数理统计和微积分等传统的数学方法为基础的预测模型,主要包括:时间序列模型、卡尔曼滤波模型、参数回归模型等;第二类是以现代科学技术和方法(如模拟技术、神经网络、模拟技术)为主要研究手段而形成的短期预测模型,该种方法不追求严格意义上的数学推导和明确的物理意义,更加重视与现实交通流量的拟合接近程度,该种方法主要包括非参数回归模型、KARIMA算法、基于小波理论的方法、谱分析和多种与神经网络相关的复合预测模型等。现阶段广泛应用的主要有以下四种模型。 历史平均模型Stepehanedes于1981年将此方法应用于城市交通控制系统中。其特点有算法简单,参数可用最小二乘法进行估计,操作简单,速度快,但其由于它是一种静态的预测方法,不能反映动态交通流基本的不确定性和非线性性,无法克服随即干扰因素的影响。 时间序列-ARIMA模型由Ahmed和Cook于1979年首次在交通领域提出。在大量连续数据的基础上,此模型没有较好的预测精度,但需要复杂的参数估计,且其对历史数据的依赖性较高,成本较高。该方法技术比较成熟,特别适用于稳定的交通流。该模型只是单纯从时间序列分析的角度进行预测,没有考虑上下游路段之间的流量关系。 神经网络模型人工神经网络诞生于20世纪40年代,Schin 于1992年用之于长期的交通预测,1993年1994年Dougherty 和Clark 分别将其应用于短期交通预测。该方法在一定程度上摆脱了建立精确数学模型的困扰,为研究工作开辟了新的思路。应用较广泛的有BP神经网络-误差反传神经网络模型、单元神经网络模型、基于谱分析的神经网络模型、高阶神经网络模型和模糊神经网络模型等方法 非参数回归模型,由Davis和Smith于1991年应用到交通预测领域,该预测方法是一种适合不确定性、非线性的动态系统的非参数建模方法。无需先验知识,只需足够的历史数据。 鉴于道路交通系统的非线性、复杂性和不确定性等特征,许多无模型的预测方法被应用到短期的交通流预测当中,且取得了良好的效果,研究发现,考虑上下游道路流量的关系的预测方法更能反映实际情况,比起单纯的时间序列预测方法更加贴合实际,有更大的发展空间。
第40卷第5期 2006年5月 上海交通大学学报 J OU RNAL OF SHAN GHA I J IAO TON G UNIV ERSIT Y Vol.40No.5 May 2006 收稿日期:2005206208 作者简介:周平方(19762),男,湖南常宁人,博士生,主要从事实时系统、计算机控制系统等研究,E 2mail :zhoupf @https://www.doczj.com/doc/b98721317.html,. 谢剑英(联系人),男,教授,博士生导师,电话(Tel.):021*********. 文章编号:100622467(2006)0520838205 实时控制系统一种基于模型预测控制的反馈调度 周平方, 谢剑英 (上海交通大学自动化系,上海200030) 摘 要:提出一种基于模型预测控制(M PC )的反馈调度算法(FS 2M PC ),可以在有限计算资源的 情况下改进实时控制系统的性能.将被控的实时调度过程模型化为受约束的任务集密度控制问题.在FS 2MPC 算法中,约束条件保证任务集在最早截止时限优先(EDF )算法下是可调度的;同时,M PC 的优化目标通过减小控制任务的截止时限使整个任务集的密度尽可能接近100%,从而提高控制任务的优先级,降低输出抖动.仿真结果表明,在有限计算资源的情况下,FS 2M PC 显著地降低了由调度过程引起的控制性能损失. 关键词:实时控制系统;反馈调度;模型预测控制;最早截止时限优先中图分类号:TP 273 文献标识码:A A Model Predictive Control 2Based Feedback Scheduling for Real 2T ime Control Systems Z HOU Pi ng 2f ang , X I E J i an 2y i ng (Dept.of Automation ,Shanghai Jiaotong Univ.,Shanghai 200030,China ) Abstract :A feedback scheduling based on model p redictive control (FS 2M PC )was presented to improve t he cont rol performance of real 2time control system subject to limited comp utational resource.The controlled real 2time scheduling is modelled as a const rained density cont rol p roblem of t he total task set.In t he FS 2M PC ,t he const raint s guarantee t hat t he task set is schedulable by EDF (earliest deadline first )algorit hm.At t he same time ,t he optimization goal of M PC (model p redictive cont rol )makes t he density of t he total task set as clo se to 1as po ssible t hrough shortening cont rol tasks ’deadlines.As a result ,t he cont rol tasks obtain higher p riorities and t he outp ut jitter is reduced.The simulation result s illust rate t hat t he schedu 2ling induced control performance lo ss is reduced greatly by t he FS 2M PC subject to limited comp utational resource. Key words :real 2time cont rol system ;feedback scheduling (FS );model p redictive control (M PC );earliest deadline first (EDF ) 现代实时控制系统(R TCS )通常是基于一个实时内核,多个闭环控制任务在内核的基础上竞争性地使用共享的处理器时间.因此,处理器的时间被当作是一种最重要的资源,需要一定的调度算法来将其分配给各个任务.这样就可能引起控制任务的抖动,尤其是当周期很短、处理器利用率很高的时候.
交通预测模型【对各种交通流预测模型的简要分析】 摘要:随着社会的发展,交通事故、交通堵塞、环境污染和能源消耗等问题日趋严重。多年来,世界各国的城市交通专家提出各种不同的方法,试图缓解交通拥堵问题。交通流预测在智能交通系统中一直是一个热门的研究领域,几十年来,专家和学者们用各种方法建立了许多相对精确的预测模型。本文在提出交通流短期预测模型应具备的特性的基础上,讨论了几类主要模型的结果和精确度。 关键词:交通流预测;模型;展望 20世纪80年代,我国公路建设项目交通量预测研究尚处于探索成长阶段,交通量预测主要采用个别推算法,又可分为直接法和间接法。直接法是直接以路段交通量作为研究对象;间接法则是以运输量作为研究对象,最后转换为路段交通量。 进入90年代后,我国的公路建设项目,特别是高速公路建设项目的交通量分析预测多采用“四阶段”预测,该法以机动车出行起讫点调查为基础,包括交通量的生成、交通分布、交通方式选择和交通量分配四个阶段。
几十年来,世界各国的专家和学者利用各学科领域的方法开发出了各种预测模型用于短时交通流预测,总结起来,大概可以分为六类模型:基于统计方法的模型、动态交通分配模型、交通仿真模型、非参数回归模型、神经网络模型、基于混沌理论的模型、综合模型等。这些模型各有优缺点,下面分别进行分析与评价。 一、基于统计方法的模型 这类模型是用数理统计的方法处理交通历史数据。一般来说统计模型使用历史数据进行预测,它假设未来预测的数据与过去的数据有相同的特性。研究较早的历史平均模型方法简单,但精度较差,虽然可以在一定程度内解决不同时间、不同时段里的交通流变化问题,但静态的预测有其先天性的不足,因为它不能解决非常规和突发的交通状况。线性回归模型方法比较成熟,用于交通流预测,所需的检测设备比较简单,数量较少,而且价格低廉,但缺点也很明显,主要是适用性差、实时性不强,单纯依据预先确定的回归方程,由测得的影响交通流的因素进行预测,只适用于特定路段的特定流量范围,且不能及时修正误差。当实际情况与参数标定时的交通状态相差较远时,
MATLAB工具箱介绍 软件Matlab由美国MathWorks, Inc.公司出品,它的前身是C1eveMoler教授(现为美国工程院院士,Mathworks公司首席科学家)为著名的数学软件包LINPACK和EISPACK所写的一个接口程序。经过近20年的发展,目前Matlab已经发展成一个系列产品,包括它的内核及多个可供选择的工具箱。Matlab的工具箱数目不断增加,功能不断改善,这里简要介绍其中的几个。MATLAB 的M文件、工具箱索引和网上资源,可以从https://www.doczj.com/doc/b98721317.html,处查找。 (1)通讯工具箱 (Communication ToolboX) ★提供100多个函数及150多个SIMULINK模块,用于系统的仿真和分析 ★可由结构图直接生成可应用的C语言源代码 (2)控制系统工具箱 (Control System Too1box) ★连续系统设计和离散系统设计 ★状态空间和传递函数 ★模型转换 ★频域响应:Bode图、Nyquist图、Nichols图 ★时域响应:冲击响应、阶跃响应、斜波响应等 ★根轨迹、极点配置、LQG (3)金融工具箱 (Financial Loo1boX) ★成本、利润分析,市场灵敏度分析 ★业务量分析及优化 ★偏差分析 ★资金流量估算 ★财务报表
(4)频率域系统辨识工具箱 (Frequency Domain System Identification Toolbox) ★辨识具有未知延迟的连续和离散系统 ★计算幅值/相位、零点/极点的置信区间 ★设计周期激励信号、最小峰值、最优能量谱等 (5)模糊逻辑工具箱 (Fuzzy Logic Too1box) ★友好的交互设计界面 ★自适应神经—模糊学习、聚类以及Sugeno推理 ★支持SIMULINK动态仿真 ★可生成C语言源代码用于实时应用 (6)高阶谱分析工具箱 (Higher—Order Spectral Analysis Toolbox) ★高阶谱估计 ★信号中非线性特征的检测和刻划 ★延时估计 ★幅值和相位重构 ★阵列信号处理 ★谐波重构 (7)图像处理工具箱 (Image Processing Toolbox) ★二维滤波器设计和滤波 ★图像恢复增强 ★色彩、集合及形态操作
M A T L A B模型预测控制工具箱函数 8.2系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2模型建立与转换函数 8.2.1模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型;
⑤MPC传递函数模型。 在上述5种模型格式中,前两种模型格式是MATLAB通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC状态空间模型和MPC传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC状态空间模型之间的转换 MPC状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动 和采样周期的描述信息,函数ss2mod()和mod2ss()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC状态空间模型函数ss2mod() 该函数的调用格式为 pmod=ss2mod(A,B,C,D) pmod=ss2mod(A,B,C,D,minfo) pmod=ss2mod(A,B,C,D,minfo,x0,u0,y0,f0) 式中,A,B,C,D为通用状态空间矩阵; minfo为构成MPC状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆minfo(1)=dt,系统采样周期,默认值为1; ◆minfo(2)=n,系统阶次,默认值为系统矩阵A的阶次; ◆minfo(3)=nu,受控输入的个数,默认值为系统输入的维数; ◆minfo(4)=nd,测量扰的数目,默认值为0; ◆minfo(5)=nw,未测量扰动的数目,默认值为0; ◆minfo(6)=nym,测量输出的数目,默认值系统输出的维数; ◆minfo(7)=nyu,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o,则取默认值。 x0,u0,y0,f0为线性化条件,默认值均为0; pmod为系统的MPC状态空间模型格式。 例8-5将如下以传递函数表示的系统模型转换为MPC状态空间模型。 解:MATLAB命令如下:
神经网络模型预测控制器 摘要:本文将神经网络控制器应用于受限非线性系统的优化模型预测控制中,控制规则用一个神经网络函数逼近器来表示,该网络是通过最小化一个与控制相关的代价函数来训练的。本文提出的方法可以用于构造任意结构的控制器,如减速优化控制器和分散控制器。 关键字:模型预测控制、神经网络、非线性控制 1.介绍 由于非线性控制问题的复杂性,通常用逼近方法来获得近似解。在本文中,提出了一种广泛应用的方法即模型预测控制(MPC),这可用于解决在线优化问题,另一种方法是函数逼近器,如人工神经网络,这可用于离线的优化控制规则。 在模型预测控制中,控制信号取决于在每个采样时刻时的想要在线最小化的代价函数,它已经广泛地应用于受限的多变量系统和非线性过程等工业控制中[3,11,22]。MPC方法一个潜在的弱点是优化问题必须能严格地按要求推算,尤其是在非线性系统中。模型预测控制已经广泛地应用于线性MPC问题中[5],但为了减小在线计算时的计算量,该部分的计算为离线。一个非常强大的函数逼近器为神经网络,它能很好地用于表示非线性模型或控制器,如文献[4,13,14]。基于模型跟踪控制的方法已经普遍地应用在神经网络控制,这种方法的一个局限性是它不适合于不稳定地逆系统,基此本文研究了基于优化控制技术的方法。 许多基于神经网络的方法已经提出了应用在优化控制问题方面,该优化控制的目标是最小化一个与控制相关的代价函数。一个方法是用一个神经网络来逼近与优化控制问题相关联的动态程式方程的解[6]。一个更直接地方法是模仿MPC方法,用通过最小化预测代价函数来训练神经网络控制器。为了达到精确的MPC技术,用神经网络来逼近模型预测控制策略,且通过离线计算[1,7.9,19]。用一个交替且更直接的方法即直接最小化代价函数训练网络控制器代替通过训练一个神经网络来逼近一个优化模型预测控制策略。这种方法目前已有许多版本,Parisini[20]和Zoppoli[24]等人研究了随机优化控制问题,其中控制器作为神经网络逼近器的输入输出的一个函数。Seong和Widrow[23]研究了一个初始状态为随机分配的优化控制问题,控制器为反馈状态,用一个神经网络来表示。在以上的研究中,应用了一个随机逼近器算法来训练网络。Al-dajani[2]和Nayeri等人[15]提出了一种相似的方法,即用最速下降法来训练神经网络控制器。 在许多应用中,设计一个控制器都涉及到一个特殊的结构。对于复杂的系统如减速控制器或分散控制系统,都需要许多输入与输出。在模型预测控制中,模型是用于预测系统未来的运动轨迹,优化控制信号是系统模型的系统的函数。因此,模型预测控制不能用于定结构控制问题。不同的是,基于神经网络函数逼近器的控制器可以应用于优化定结构控制问题。 在本文中,主要研究的是应用于非线性优化控制问题的结构受限的MPC类型[20,2,24,23,15]。控制规则用神经网络逼近器表示,最小化一个与控制相关的代价函数来离线训练神经网络。通过将神经网络控制的输入适当特殊化来完成优化低阶控制器的设计,分散和其它定结构神经网络控制器是通过对网络结构加入合适的限制构成的。通过一个数据例子来评价神经网络控制器的性能并与优化模型预测控制器进行比较。 2.问题表述 考虑一个离散非线性控制系统: 其中为控制器的输出,为输入,为状态矢量。控制
城市道路交通流预测 1交通流预测方法历程 在交通预测方法方面,上世纪60年代,国外就开始研究交通流预测模型,并逐渐将这些模型应用于短时交通流预测。早期的预测方法主要有时间序列法,自回归滑动平均模型(ARMA)、卡尔曼滤波预测模型等等。这些预测模型主要为线性模型,其考虑因素都较为简单,一般都用最小二乘法(LS)在线估计参数,利用历史数据线性变化趋势预测交通流参数。早期的方法具有计算简便,易于数据实时更新,便于数据量和规模较小的条件下应用的优点;但是由于这些模型不能体现交通流的非线性和随机性,很难克服随机因素对交通流量的干扰,所以随着预测时间隔的缩短,随机因素的作用也增强了,这些模型的预测精度和实时性也就变得达不到预期的效果。 伴随着交通流量预测研究的深入进行,学者们又提出了很多更复杂的、更高精度的预测方法和模型。从表现形式上大体可分成三类:第一类是早期以数理统计等传统数学方法为基础的线性预测模型;一类是以现代控制理论和科学技术(如模拟技术、神经网络、模糊控制)为主要方法和手段而形成的非线性预测模型,他们的特点是不需要精确的物理模型,在一定应用范围内却具有良好的鲁棒性、精确度;第三类主要是前两者的组合应用,第三类方法综合了的特性,克服前两者他们的缺点,使得前两者的优点互补,从而达到很好的预测效果。这类方法建模过程较为复杂,但为短时交通流预测研究开辟了新的路径,也是将来短时交通流预测方法的发展方向。 早在1994 年Hobeika, A. G 和Chang Kyun Kim 在文献中提出了根据截面历史数据、实时数据和上游交通流数据进行短时交通流预测。Brian L. Smith 和Miehael J. Demetsky(1997)在文献中对历史平均预测模型、时间序列预测模型、神经网络预测模型和非参数回归预测模型四种交通流预测模型进行了比较,结果非参数回归模型以其模型简单,精度高成为了小样本预测中最佳的
Toolbox工具箱 序号工具箱备注 一、数学、统计与优化 1 Symbolic Math Toolbox 符号数学工具箱 Symbolic Math Toolbox?提供用于求解和推演符号运算表达式以及执行可变精度算术的函数。您可以通过分析执行微分、积分、化简、转换以及方程求解。另外,还可以利用符号运算表达式为MATLAB?、Simulink?和Simscape?生成代码。 Symbolic Math Toolbox 包含MuPAD?语言,并已针对符号运算表达式的处理和执行进行优化。该工具箱备有MuPAD 函数库,其中包括普通数学领域的微积分和线性代数,以及专业领域的数论和组合论。此外,还可以使用MuPAD 语言编写自定义的符号函数和符号库。MuPAD 记事本支持使用嵌入式文本、图形和数学排版格式来记录符号运算推导。您可以采用HTML 或PDF 的格式分享带注释的推导。 2 Partial Differential Euqation Toolbox 偏微分方程工具箱 偏微分方程工具箱?提供了用于在2D,3D求解偏微分方程(PDE)以及一次使用有限元分析。它可以让你指定和网格二维和三维几何形状和制定边界条件和公式。你能解决静态,时域,频域和特征值问题在几何领域。功能进行后处理和绘图效果使您能够直观地探索解决方案。 你可以用偏微分方程工具箱,以解决从标准问题,如扩散,传热学,结构力学,静电,静磁学,和AC电源电磁学,以及自定义,偏微分方程的耦合系统偏微分方程。 3 Statistics Toolbox 统计学工具箱
4 Curve Fitting Toolbox 曲线拟合工具箱 Curve Fitting Toolbox?提供了用于拟合曲线和曲面数据的应用程序和函数。使用该工具箱可以执行探索性数据分析,预处理和后处理数据,比较候选模型,删除偏值。您可以使用随带的线性和非线性模型库进行回归分析,也可以指定您自行定义的方程式。该库提供了优化的解算参数和起始条件,以提高拟合质量。该工具箱还提供非参数建模方法,比如样条、插值和平滑。 在创建一个拟合之后,您可以运用多种后处理方法进行绘图、插值和外推,估计置信区间,计算积分和导数。 5 Optimization Toolbox 优化工具箱 Optimization Toolbox?提供了寻找最小化或最大化目标并同时满足限制条件的函数。工具箱中包括了线性规划、混合整型线性规划、二次规划、非线性优化、非线性最小二乘的求解器。您可以使用这些求解器寻找连续与离散优化问题的解决方案、执行折衷分析、以及将优化的方法结合到其算法和应用程序中。 6 Global Optimization Toolbox 全局优化工具箱 Global Optimization Toolbox 所提供的方法可为包含多个极大值或极小值的问题搜索全局解。它包含全局搜索、多初始点、模式搜索、遗传算法和模拟退火求解器。对于目标
M A T L A B模型预测控制 工具箱函数 TTA standardization office【TTA 5AB- TTAK 08- TTA 2C】
M A T L A B模型预测控制工具箱函数 系统模型建立与转换函数 前面读者论坛了利用系统输入/输出数据进行系统模型辨识的有关函数及使用方法,为时行模型预测控制器的设计,需要对系统模型进行进一步的处理和转换。MATLAB的模型预测控制工具箱中提供了一系列函数完成多种模型转换和复杂系统模型的建立功能。 在模型预测控制工具箱中使用了两种专用的系统模型格式,即MPC状态空间模型和MPC传递函数模型。这两种模型格式分别是状态空间模型和传递函数模型在模型预测控制工具箱中的特殊表达形式。这种模型格式化可以同时支持连续和离散系统模型的表达,在MPC传递函数模型中还增加了对纯时延的支持。表8-2列出了模型预测控制工具箱的模型建立与转换函数。 表8-2 模型建立与转换函数 模型转换 在MATLAB模型预测工具箱中支持多种系统模型格式。这些模型格式包括: ①通用状态空间模型; ②通用传递函数模型; ③MPC阶跃响应模型; ④MPC状态空间模型; ⑤MPC传递函数模型。
在上述5种模型格式中,前两种模型格式是MATLAB通用的模型格式,在其他控制类工具箱中,如控制系统工具箱、鲁棒控制工具等都予以支持;而后三种模型格式化则是模型预测控制工具箱特有的。其中,MPC状态空间模型和MPC传递函数模型是通用的状态空间模型和传递函数模型在模型预测控制工具箱中采用的增广格式。模型预测控制工具箱提供了若干函数,用于完成上述模型格式间的转换功能。下面对这些函数的用法加以介绍。 1.通用状态空间模型与MPC状态空间模型之间的转换 MPC状态空间模型在通用状态空间模型的基础上增加了对系统输入/输出扰动和采样周期的描述信息,函数ss2mod()和mod2ss()用于实现这两种模型格式之间的转换。 1)通用状态空间模型转换为MPC状态空间模型函数ss2mod() 该函数的调用格式为 pmod= ss2mod(A,B,C,D) pmod= ss2mod(A,B,C,D,minfo) pmod= ss2mod(A,B,C,D,minfo,x0,u0,y0,f0) 式中,A, B, C, D为通用状态空间矩阵; minfo为构成MPC状态空间模型的其他描述信息,为7个元素的向量,各元素分别定义为: ◆minfo(1)=dt,系统采样周期,默认值为1; ◆minfo(2)=n,系统阶次,默认值为系统矩阵A的阶次; ◆minfo(3)=nu,受控输入的个数,默认值为系统输入的维数; ◆minfo(4)=nd,测量扰的数目,默认值为0; ◆minfo(5)=nw,未测量扰动的数目,默认值为0; ◆minfo(6)=nym,测量输出的数目,默认值系统输出的维数; ◆minfo(7)=nyu,未测量输出的数目,默认值为0; 注:如果在输入参数中没有指定m i n f o,则取默认值。 x0, u0, y0, f0为线性化条件,默认值均为0; pmod为系统的MPC状态空间模型格式。 例8-5将如下以传递函数表示的系统模型转换为MPC状态空间模型。 解:MATLAB命令如下:
云南大学信息学院学生实验报告 课程名称:现代控制理论 实验题目:预测控制 小组成员:李博(12018000748) 金蒋彪(12018000747) 专业:2018级检测技术与自动化专业
1、实验目的 (3) 2、实验原理 (3) 2.1、预测控制特点 (3) 2.2、预测控制模型 (4) 2.3、在线滚动优化 (5) 2.4、反馈校正 (5) 2.5、预测控制分类 (6) 2.6、动态矩阵控制 (7) 3、MATLAB仿真实现 (9) 3.1、对比预测控制与PID控制效果 (9) 3.2、P的变化对控制效果的影响 (12) 3.3、M的变化对控制效果的影响 (13) 3.4、模型失配与未失配时的控制效果对比 (14) 4、总结 (15) 5、附录 (16) 5.1、预测控制与PID控制对比仿真代码 (16) 5.1.1、预测控制代码 (16) 5.1.2、PID控制代码 (17) 5.2、不同P值对比控制效果代码 (19) 5.3、不同M值对比控制效果代码 (20) 5.4、模型失配与未失配对比代码 (20)
1、实验目的 (1)、通过对预测控制原理的学习,掌握预测控制的知识点。 (2)、通过对动态矩阵控制(DMC)的MATLAB仿真,发现其对直接处理具有纯滞后、大惯性的对象,有良好的跟踪性和较强的鲁棒性,输入已 知的控制模型,通过对参数的选择,来获得较好的控制效果。 (3)、了解matlab编程。 2、实验原理 模型预测控制(Model Predictive Control,MPC)是20世纪70年代提出的一种计算机控制算法,最早应用于工业过程控制领域。预测控制的优点是对数学模型要求不高,能直接处理具有纯滞后的过程,具有良好的跟踪性能和较强的抗干扰能力,对模型误差具有较强的鲁棒性。因此,预测控制目前已在多个行业得以应用,如炼油、石化、造纸、冶金、汽车制造、航空和食品加工等,尤其是在复杂工业过程中得到了广泛的应用。在分类上,模型预测控制(MPC)属于先进过程控制,其基本出发点与传统PID控制不同。传统PID控制,是根据过程当前的和过去的输出测量值与设定值之间的偏差来确定当前的控制输入,以达到所要求的性能指标。而预测控制不但利用当前时刻的和过去时刻的偏差值,而且还利用预测模型来预估过程未来的偏差值,以滚动优化确定当前的最优输入策略。因此,从基本思想看,预测控制优于PID控制。 2.1、预测控制特点 首先,对于复杂的工业对象。由于辨识其最小化模型要花费很大的代价,往往给基于传递函数或状态方程的控制算法带来困难,多变量高维度复杂系统难以建立精确的数学模型工业过程的结构、参数以及环境具有不确定性、时变性、非线性、强耦合,最优控制难以实现。而预测控制所需要的模型只强调其预测功能,不苛求其结构形式,从而为系统建模带来了方便。在许多场合下,只需测定对象的阶跃或脉冲响应,便可直接得到预测模型,而不必进一步导出其传递函数或状
龙源期刊网 https://www.doczj.com/doc/b98721317.html, 公路交通拥堵现象的建模与分析 作者:陆睿得 来源:《科学家》2017年第11期 摘要公路交通的便利程度直接影响着社会经济的发展步伐,随着我国汽车保有量的增加,道路交通的拥堵问题日益严重。通过对交通拥堵现象的观察,本文对该问题进行了理论建模。相对于经典的模型,该理论模型的计算结果更加符合人们的日常经验。此外,我们还分析了车祸等因素对交通的影响,并根据计算结果提出了几种解决拥堵现象的可能方案。 关键词道路;拥堵;车流量;车祸 中图分类号 U4 文献标识码 A 文章编号 2095-6363(2017)11-0023-02 “要致富,先修路”的顺口溜说明了一个朴素的道理:公路交通的便利可以降低运输成本,促进不同地区之间的合作交流,吸引外来投资,并促进社会经济健康发展。近些年来,国家对于公路建设的重视程度不断提高,在高速公路建设方面尤为突出,比如,2016年全国新增高 速公路里程达到4 500千米,相当于北京到上海距离的3.7倍。 伴随着城市化进程的加快,城市人口的暴增引发了严重的交通问题。资料显示,我国市区的汽车行驶平均速度已经从60年代的25km/h~30km/h下降到了现在的10km/h~15km/h[1]。交通的拥堵不仅增加了人们出行的成本,制约了社会发展的步伐,降低了道路建设的效用,更带来了巨额的经济损失。只有深刻理解道路拥堵问题产生的原因,我们才能对症下药,提出合理的解决对策。因此,建立有效描述道路拥堵现象的理论模型是非常必要的。 通过观察车辆在道路上的运行规律,本文建立了道路拥堵的理论模型,并用该模型的结果与前人的经典理论进行了比对。基于本文的理论模型,还进一步分析了影响车流量的因素,提出了几种降低道路拥堵的可能方案。 1 拥堵现象的理论建模 为了描述道路拥堵现象,我们需要考虑总车流量Q,平均车流速度v和车流密度K这几个量之间的关系。根据车流现象的物理过程,我们有: (1) 当道路拥堵(即车流密度较大)时,车流速度v较慢;反之当道路车辆较少(即车流密度较小)时,车速较快。描述该现象的一个经典理论模型为Greenshield模型[2-3],它假设车流密度K与车流速度v之间存在线性关系,且当道路上车流密度K最大时,车行速度v为0。如图 1(a)所示,该关系可写为:
交通流预测模型综述 摘要: 随着社会的发展,交通事故、交通堵塞、环境污染和能源消耗等问题日趋严重。为了缓解交通压力,交通专家也提出了各种不同的方法。在交通网络越来越复杂的今天,交通流预测在智能交通系统中是个热门的研究领域,因为正确的交通流预测,可以进行实时交通信号控制,交通分配、路径诱导、自动导航,事故检测等。本文从交通流短期预测模型出发,分析常见预测模型的优缺点,得出综合模型进行预测将是交通流预测领域的发展趋势。 关键字:交通流预测,智能交通系统,综合模型 Traffic flow predictive models review Abstract: With the development of society, traffic accidents, traffic jams, environmental pollution and energy consumption problems become more and more serious. In order to alleviate traffic pressure, traffic experts also puts forward all kinds of different methods. In the traffic network is more and more complex today, traffic flow predictive in intelligent transportation system is a hot research fields, because the correct traffic flow predictive, can real-time traffic signal control, traffic distribution, route guidance, automatic navigation, accident detection, etc. This article from short-term prediction model of traffic flow, analyzes the advantages and disadvantages of common prediction model, it is concluded that predict comprehensive model will be traffic flow predictive areas of development trend. Keywords:Traffic flow predictive, Intelligent transportation system, integrated model 引言 目前,有关交通流预测方面的研究已取得大量的成果,建立了多种实时交通量预测的方法,其预测精度也达到了较高水平。本文先是通过研究分析不同交通流短期预测模型的优缺点,然后对具有优势的基于神经网络的综合模型进行模型的构建。 一、交通流预测概述 (一)交通流预测的必要性 随着人们生活水平的提高,私家车的数量、人们出行的次数等越来越多,使得交通事故、交通堵塞、环境污染和能源消耗等问题日趋严重。很多城市也陷入了“拥有最宽阔的马路,也拥有最宽阔的…停车场?”的困境,严重影响了城市的运转效率,客观上阻碍了社会、经济的快速发展。多年来,世界各国的城市交通专家提出各种不同的方法,试图通过先进的智能交通手段来缓解交通拥堵问题。而实现这些系统或方法的关键,不仅要有实时的道路检测数据,更重要的是,要获得实时、可靠、准确的预测信息。再利用动态路径诱导和交通信息系统为出行者提供实时有效的道路信息,实现动态路径诱导,达到节约出行者旅行时间,缓解道路拥堵,减少污染、节省能源等的目的。因此,准确、可靠的交通预测信息是动态路径诱导系统的基础和关键。
动态矩阵控制算法实验报告 院系:电子信学院 姓名:郝光杰 学号:172030039 专业:控制理论与控制工程 导师:俞孟蕻
MATLAB环境下动态矩阵控制实验 一、实验目的: 对于带有纯滞后、大惯性的研究对象,通过动态控制矩阵的MATLAB的直接处理与仿真实验,具有较强的鲁棒性和良好的跟踪性。输入已知的控制模型,通过对参数的选择,来取的良好的控制效果。 二、实验原理: 动态矩阵控制算法是一种基于被控对象非参数数学模型的控制算法,它是一种基于被控对象阶跃响应的预测控制算法,以对象的阶跃响应离散系统为模型,避免了系统的辨识,采用多步预估技术,解决时延问题,并按照预估输出与给定值偏差最小的二次性能指标实施控制,它适用于渐进稳定的线性对象,系统动态特性中存在非最小相位特性或纯滞后都不影响算法的直接使用。 三、实验环境: 计算机 MATLAB2016b 四、实验步骤: 影响控制效果的主要参数有: 1)采样周期T与模型长度N 在DMC中采样周期T与模型长度N的选择需要满足香农定理和被控对象的类型及其动态特性的要求,通常需要NT后的阶跃响应输出值接近稳定值。 2)预测时域长度P P对系统的快速性和稳定性具有重要影响。为使滚动优化有意义,应使P 包含对象的主要动态部分,P越小,快速性提高,稳定性变差;反之,P越大,系统实时性降低,系统响应过于缓慢。 3)控制时域长度M
M控制未来控制量的改变数目,及优化变量的个数,在P确定的情况下,M越小,越难保证输出在各采样点紧密跟踪期望输出值,系统响应速度缓慢, 可获得较好的鲁棒性,M越大,控制机动性越强,改善系统的动态性能,但是稳定性会变差。 五、实例仿真 (一)算法实现 设GP(s)=e-80s/(60s+1),采用DMC后的动态特性如图1所示,采样周期 T=20s,优化时域P=10,M=2,建模时域N=20。 MATLAB程序1: g=poly2tfd(1,[60 1],0,80);%通用传函转换为MPC模型 delt=20; %采样周期 nt=1; %输出稳定性向量 tfinal=1000; %截断时间 model=tfd2step(tfinal,delt,nt,g);%传函转换为阶跃响应模型 plant=model;%进行模型预测控制器设计 p=10; m=2; ywt=[];uwt=1;%设置输入约束和参考轨迹等控制器参数 kmpc=mpccon(plant,ywt,uwt,m,p);%模型预测控制器增益矩阵计算 tend=1000;r=1;%仿真时间 [y,u,yrn]=mpcsim(plant,model,kmpc,tend,r);%模型预测控制仿真 t=0:20:1000;%定义自变量t的取值数组 plot(t,y) xlabel(‘图一DMC控制动态响应曲线(time/s)’); ylabel(‘响应曲线’); 结果如下: Percent error in the last step response coefficient