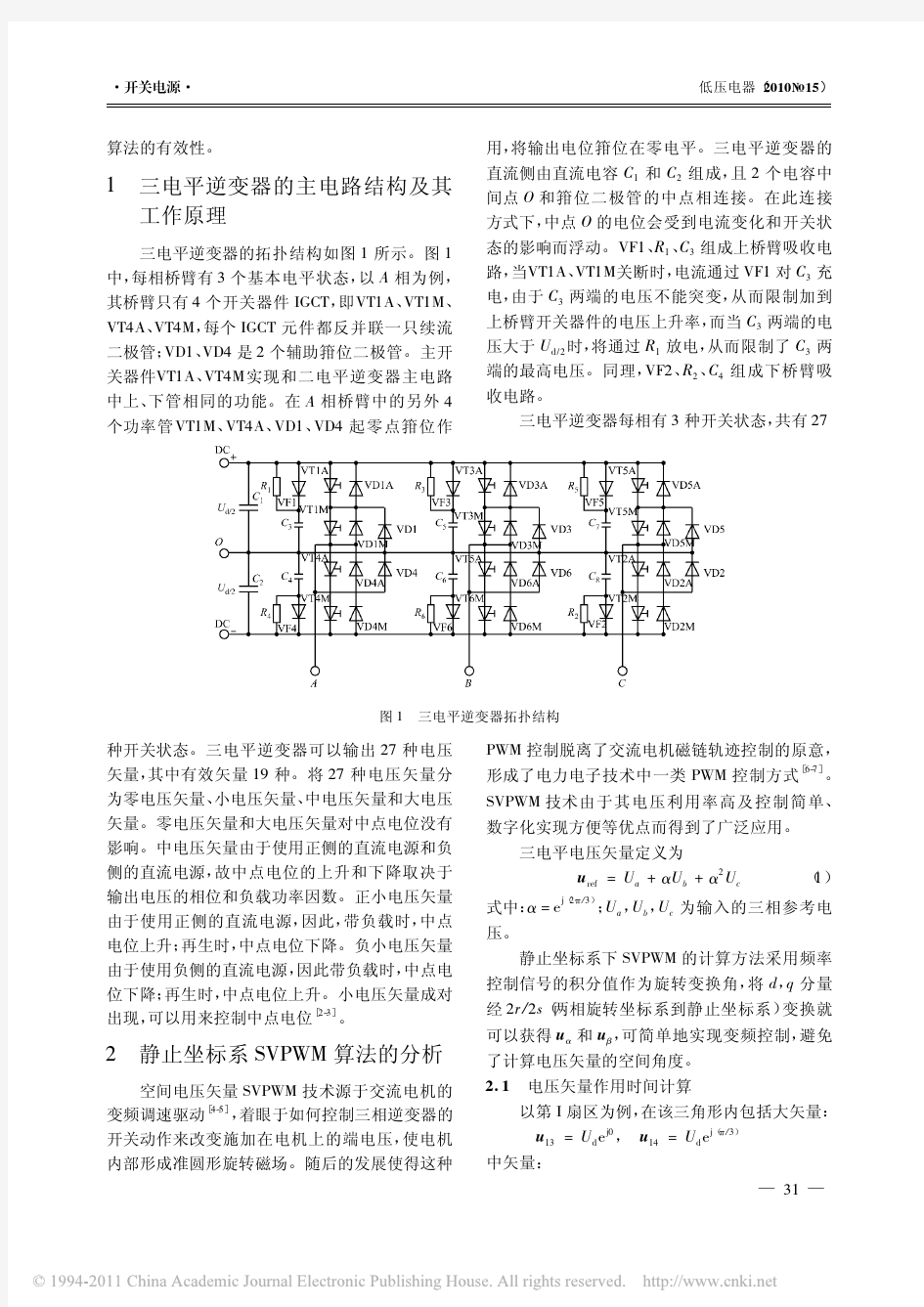
电压型逆变电路[浏览次数:约247次] ?电压型逆变电路是指由电压型直流电源供电的逆变电路。它的直流侧为电压源,或并联有大电容,相当于电压源,直流侧电压基本无脉动,直流回路呈现低阻抗。电压型 逆变电路主要应用于各种直流电源。 目录 ?电压型逆变电路种类 ?电压型逆变电路原理 ?电压型逆变电路特点 电压型逆变电路种类 ?1、单相电压型逆变电路 (1)单相半桥电压型逆变电路 优点:简单,使用器件少 缺点:交流电压幅值Ud/2,直流侧需两电容器串联,要控制两者电压均衡 (2)单相全桥电压型逆变电路,由两个半桥电路的组合,是单相逆变电路中应用最多的。 (3)带中心抽头变压器的逆变电路 2、三相电压型逆变电路 三个单相逆变电路可组合成一个三相逆变电路,应用最广的是三相桥式逆变电路。 电压型逆变电路原理 ?以三相电压型逆变电路为例:图1是一个三相电压型逆变电路的主电路。直流电源采用相控整流电路,由普通晶闸管组成。逆变电路由6个导电臂组成,每个导电臂均由具有自关断能力的全控型器件及反并联二极管组成,所以实际上也是一种全控型逆变电路。负载为感性,星形接法,在整流电路和逆变电路之间并联大电容Cd。由于Cd的作用,逆变入端电压平滑连续,直流电源具有电压源性质。
逆变电路中各全控器件控制极电压信号的时序如图2b所示。信号脉宽为180°,每隔60°有一次脉冲电平的变化,任何时刻有3个脉冲处于高电平。相应地在主电路中也有3个导电臂处于导通状态。 依此类推,可得uAO波形如图2c所示。其他两相uBO和uCO波形分别滞后于uAO120°和240°。根据uAB=uAO-uBO,可得uAB波形如图2e所示。由图可见,逆变电路输出电压uAB、uBC和uCA是分别互差120°的交变四阶梯波。该波形不随负载而
四桥臂三相逆变器的控制策略 阮新波严仰光 摘要提出了一种新型的三相四线逆变器,它有四个桥臂,第四个桥臂用来构成中点,从而省去了三相三桥臂逆变器中的中点形成变压器,减小了逆变器的体积和重量。针对这种逆变器,本文提出了一种电流调节器,它根据三相滤波电感电流和给定电流的误差值最大的那相选择逆变器的开关模态。为了消除输出相电压的静态误差,本文讨论 了一种基于PI调节器改进的电压调节方案。仿真结果表明,本文的思路是可行的。本 文为构造大功率、高效率的三相四线逆变器提供了可靠的理论基础。 关键词:三相逆变器控制策略 The Control Strategy for Three-Phase Inverter with Four Bridge Legs Ruan Xinbo Yan Yangguang (Nanjing University of Aeronaut ics & Astronautics 210016 China) Abstract A novel three phase inverter with four bridge legs i s presented in this paper.The inverter eliminates the neutral forming transforme r by adding a bridge leg to form neutral point to provide balanced voltages to a ny kinds of three phase loads.The principle of the inverter is analyzed,and a ne w current regulator,which chooses switching modes a ccording to the maximum cur rent error of filter inductance current and the reference current is proposed.Th e modified voltage regulator on the basis of PI regulator is proposed to elimina te output voltage static error under any load conditions. Keywords:Three-phase Inverters Control strategies 1 引言 三相逆变器一般是采用三个桥臂组成的拓扑结构,为了给不对称负载供电,必须在 输出端加入一个中点形成变压器(Neutral Formed Transformer,NFT),如图1所示。中点形成变压器是变比为1的自耦变压器,工作频率为输出交流电的频率,体积和重 量很大,而且体积和重量随着负载不对称的程度变化而变化,不对称度越大,NFT的体积重量也就越大。
电压空间矢量
电气空间矢量PWM 自动1202 熊立波 20121799 什么是电气空间矢量PWM ,以及怎样用于变频器V/F 控制? 空间矢量的定义:交流电动机绕组的电压、电流、磁链等物理量都是随时间变化的,分析时常用时间向量来表示,但如果考虑到他们所在的空间位置,也可以定义为空间矢量。 在图中,A ,B ,C 分别表示在空间静止的电动机定子三相绕组的轴线,它们在空间互差 120,三相定子正弦波相电压0A U 、0B U 、 C U 分别加在三相绕组上。可以定义三个定子 电压空间矢量0A u 、0B u 、0C u ,使它们的方向始终处于各相绕组的轴线上,而大小则随时 间按正弦规律波动,时间相位互相错开的角度也是0 120。 0s A B C u u u u =++ 当定子相电压为三相平衡正弦电压时,三相合成矢量 0s A B C u u u u =++ 1 1 2111224[cos()cos()cos()]333 23 j j m m m j t j t m s t t t U U e U e U e U e γγππωωωωω= +-+-== 合成空间矢量表示的定子电压方程式 s s s s d dt u i R ψ =+ 忽略定子电阻压降,定子合成电压与合成磁链空间矢量的近似关系为
s d dt ψ 或 s s dt u ψ ≈? 三相逆变电路每相上下桥臂开关动作相反,将上桥臂导通而下桥臂关断的状态记为1,反之记为0,则三相逆变电路共对应8种输出电压状态。 PWM 逆变器共有8种工作状态 当 (A S B S C S )=(1 0 0) (A u B u C u )=(2d U 2d U - 2d U -) 242331 22(1)(1) 32 32j j j j d d U U u e e e e ππ γγ = --=-- 224242 [(1cos cos )(sin sin )]323333 3d d j U U ππππ = ---+= 当 (A S B S C S )=(1 1 0) (A u B u C u )=(2d U 2d U 2d U - ) 2423 322(1)(1) 322j j j j d d U U u e e e e ππ γγ=+-=+- 22424[(1cos cos )(sin sin )]323333d j U ππππ = +-+- 322(13)323j d d j U U e π= += 依次类推,可得8个基本空间矢量。 6个有效工作矢量 1 u ~6 u
近年来,电机的空间矢量理论被引入到逆变器及其控制中,形成和发展了空间矢量 PWM(SVPWM)控制思想。其原理就是利用逆变器各桥臂开关控制信号的不同组合,使逆变器输出电压空间矢量的运行轨迹尽可能接近圆形。空间矢量脉宽调制技术,不仅使电机脉动降低,电流波形畸变减小,且与常规正弦脉宽调制(SP-WM)技术相比,直流电压利用率有很大提高,并更易于数字化实现。 1 电压空间矢量调制(SVPWM)算法 SVPWM是以磁链跟踪控制为目标,使逆变器瞬时输出三相脉冲电压合成的空间电压矢量与期望输出三相正弦波电压合成的空间电压矢量相等。对于三相电压型逆变器而言,它有8种工作状态,用矢量表示这8种空间状态,如图1所示。 介绍SVPWM工作原理的相关文献很多,这里不再细述,以下给出算法步骤: (1)判断参考电压矢量Vref所在扇区 引入三个中间变量A,B,C:
则扇区号:S=A+2B+4C。 (2)计算扇区的有效电压空间矢量和零矢量的作用时间Tx,Ty和T0 引入三个中间变量X,Y和Z: 对于不同的扇区,Tx,Ty按表1取值。 饱和判断:Tyout。
计算零电压矢量作用时间:T0=TPWM-Tx-Ty。 (3)开关切换时间分配 先定义空间矢量切换点分别为: 则根据空间矢量所处的扇区不同,晶体管的切换时间Tcm1,Tcm2,Tcm3分别如表2所示。
Simulink仿真环境下可以方便地利用模块和软件编程扩展进行仿真。根据上述实现方法,构造了如图2所示的Simulink仿真模型。
在模型中使用Repeating Sequence模块作为双向定时计数器,与SVPWM调制波进行比较,其输出作为滞环比较器的输入。Matlab语言编写的S函数则作为比较值的计算与分配单元。 2 仿真与分析 仿真对象:SVPWM与永磁同步电机。通过Matlab仿真得到的波形如图3所示。
变频器电压空间矢量脉宽调制(SVPWM)控制时间:2011-10-07 来源:未知编辑:电气自动化技术网点击:1071次字体设置: 大中小 经典的正弦脉宽调制(spwm)控制着眼于使变压变频器的输出电压尽量接近正弦波,并未顾及输出电流的波形如何,更未考虑电动机中产生的旋转磁场。然而交流电动机需要输入三相正弦波的最终目的是在电动机气隙形成圆形的旋转磁场,从而产生恒定的电磁转矩。如果对准这一目标,把逆变器和交流电动机视为一体,按照跟踪圆形旋转磁场来控制逆变器的工作,其效果应该更好。这种控制方法称作“磁链跟踪控制”,下面的讨论将表明,磁链轨迹是交替使用不同的电压空间矢量得到的,所以又称“电压空间矢量pwm(space vector pwm,简称svpwm)控制”。 4.1 电压空间矢量 随时间按正弦规律变化的物理量可在复平面上用时间相量表示,而在空间呈正弦分布的物理量也可在复平面上表示为一个空间矢量。图4-1a)绘出了异步电动机定子三相绕组接线图,图中箭头所指为相应物理量的给定正方向。在空间呈正弦分布的三相定子绕组磁动势可用空间矢量f a、f b、f c表示,见图4-1b),它们分别座落在代表三相定子绕组轴线空间位置的a、b、c轴上,而三相绕组合成磁动势的空间矢量为图中的f s。 f s=f a+f b+f c(4-1) 式中,f a、f b、f c的模均在各自的绕组轴线上按正弦规律作脉动变化,时间相位分别差2π/3。它们的合成磁动势空间矢量f s则绕定子参考坐标系的原点o以同步角频率旋转。当三相定子绕组电流为对称的三相正弦电流时,fs的幅值为常数,是各相磁动势幅值的3/2倍,矢量顶端的运动轨迹是一个圆,即通称的圆形旋转磁场。
电气空间矢量PWM 自动1202 熊立波 20121799 什么是电气空间矢量PWM ,以及怎样用于变频器V/F 控制? 空间矢量的定义:交流电动机绕组的电压、电流、磁链等物理量都是随时间变化的,分析时常用时间向量来表示,但如果考虑到他们所在的空间位置,也可以定义为空间矢量。 在图中,A ,B ,C 分别表示在空间静止的电动机定子三 相绕组的轴线,它们在空间互差0 120 ,三相定子正弦 波相电压0A U 、0B U 、0C U 分别加在三相绕组上。可以定义三个定子电压空间矢量 A u 、 B u 、 0C u ,使 它们的方向始终处于各相绕组的轴线上,而大小则随时间按正弦规律波动,时间相位互相错开的角度也是 120。 0s A B C u u u u =++ 当定子相电压为三相平衡正弦电压时,三相合成矢量 0s A B C u u u u =++ 112111224[cos()cos()cos()]33323 j j m m m j t j t m s t t t U U e U e U e U e γγππωωωωω=+-+-= = 合成空间矢量表示的定子电压方程式 s s s s d dt u i R ψ =+ 忽略定子电阻压降,定子合成电压与合成磁链空间矢量的近似关系为 s d dt ψ 或 s s dt u ψ ≈? 三相逆变电路每相上下桥臂开关动作相反,将上桥臂导通而下桥臂关断的状态记为1,反之 记为0,则三相逆变电路共对应8种输出电压状态。 PWM 逆变器共有8种工作状态 当 (A S B S C S )=(1 0 0) (A u B u C u )=(2d U 2d U - 2d U -)
逆变器控制策略: 逆变器的控制目标是提高逆变器输出电压的稳态和动态性能。稳态性能主要是指输出电 压的稳态精度和提高带不平衡负载的能力;动态性能主要是指输出电压的THD 和负载突变时的动态响应水平。在这些指标中输出电压THD 要求比较高,对于三相逆变器,一般要求阻性负载满载时THD 小于2%,非线性满载(整流性负载)的THD 小于5%。 1、离网逆变器的控制性能要求主要是使其输出电压具有良好的控制抗扰性。 离网逆变器采用输出电容电流内环和输出电压外环的双闭环控制。 电流调节器可以实现快速加减速和电流限幅作用,同时使系统的抗电源扰动和负载扰动 的能力增强。 电压调节器主要是控制输出电压的稳定。 2、基于LC 滤波器的离网型逆变器 图2 基于LC 滤波的电压型离网逆变器主电路 图3 基于LC 的VSI 输出电压单闭环控制结构 图5 基于电容电流反馈的单位调节器内环控制结构 1VD 3VD 5VD 2VD 6VD 4VD 1 V 3V 5V 4V 6V 2V U V W dc C C R L dc u + -L i o i C i L u C u i u 调节 器 PWM K 1sL R +-i u o i C *u C u L i -1sC -C i ? ? ?C u L u *Cq u cq u PI P PWM K 1sL sC 1iq u C *i C i ????oq i +----
图14 基于同步坐标系的LC-VSI 双环控制结构 PI PI P P Inv.Park Trans Inv.Clarke Trans SPWM Generator Clarke Trans Park Trans Clarke Trans Park Trans *q s U *sd U sd U q s U *sd I *q s I q s I d s I a s I βs I A U βs U a s U B U A I B I 1 1ov T s +11 e T s +1 1oi T s +PI 1Ls 1Cs P 11 oi T s +11 ov T s +*Cq u C *i iq u oq i cq u C i +-+- + -+ -电流内环
电压空间矢量脉宽调制技术的原理与特征分 析 收藏此信息打印该信息添加:袁登科陶生桂龚熙国来源:未知 1 引言 自从1964年德国a.schonung等学者率先提出了脉宽调制变频的思想—把通信系统的脉宽调制(pwm)技术应用于交流电气传动以来,至今已经出现了几十种不同的脉宽调制技术[1] [2]。脉宽调制技术控制的逆变器可以输出比传统方波逆变器性能好得多的电压波形,但它们各自的着眼点不同、各次谐波分量不同、引起电机的谐波损耗不同、对中间回路电压的利用率不同。其中电压空间矢量pwm技术中间直流回路电压的利用率较高、输出波形含有较少的谐波分量、引起的电流、转矩的脉动也较小,同时也非常有利于数字化实现,因此是非常有前途并且应用也非常广泛的一种pwm技术。本文对该脉宽调制技术的数学基础、原理、几何特征以及不同的调制区域进行了详细的分析,有助于加深对该技术的理解和对该技术的改进。 2 电压空间矢量的概念 电压空间矢量的定义式为: 由于公式中出现了虚数单位j,所以上式电压矢量是用复数表示的。可以求得其实部与虚部分别为:
根据其对应关系可以求出,采用电压矢量实部与虚部表示的三相电压为: 上面两式(2)与(3)也是在坐标变换中经常见到的3/2与2/3变换。当使用电压矢量来表示三相电压时,则有: 式中的re{z}表示取复数z的实部。 一般情况下,三相电压均是时间的变量。首先考虑某一时刻t=t0,那么此时电压矢量在空间内就是具有某一确定方向和长度的有向线段。在不同时刻,它就对应着不同方向或长度的有向线段。假定三相电压为正弦交流电,即 此时的电压空间矢量为: 可见此时的电压矢量的幅值是恒定的,与相电压峰值相等,而其幅角随时间线性增长,且速度为相电压电角频率。这即是说电压矢量端点的轨迹在空间内是一个圆。
电压控制逆变器 The voltage control inverter 为了获得高性能的逆变器,设计控制器的控制目标包括提高输出电压稳态和动态性能2个方面。目前,有关逆变器的控制方法除了工程应用成熟的PID控制[1-2]外,主要还有重复控制[3-4]、滑模控制[5-6]、无差拍控制[7-8]、模糊控制[9-10]及各种复合控制[11-14]等,这些控制方法在提高输出电压的稳态精度和负载变化时的动态响应方面,取得了一定的研究成果。然而以上控制方法主要从输出端考虑,很少考虑输入端对输出的影响,以电压源逆变器为例,以上控制方法在设计时一般都把直流输入电压看作恒定不变的。实际情况是,直流输入电压由于前级不可控整流或本身输入电压不稳定的影响并 不是恒定直流,另外负载电流中若含有谐波也会在直流输入电压上产生谐波电压[15]。此外,以上控制方法中除了PID控制,大部分 控制方法由于其复杂控制算法只能用数字控制来实现,且因条件限制不能很好地广泛应用于实践。为此,本文以常见的单相全桥逆变器为例,在传统电压模式基础上,提出了一种前馈型电压模式控制方案,控制原理上利用开关变换器稳态输入/输出占空比关系构造变换器 的控制方程,引入输入电压前馈使得其波动不会对输出电压产生影响,同时在无积分反馈环节下输出电压就能稳定跟踪参考信号,避免了PID控制中为提高稳态精度而引入积分环节造成系统稳定性下降和 动态性能滞后的影响。控制实现上采用输入电压积分电路来求解方程中的开关占空比,控制电路结构简单,便于用模拟电路实现。进行了
性能分析并与采用传统PID控制的逆变器模型进行比较,理论分析 表明前馈型电压模式控制逆变器具有稳态跟踪性能好、抗输入电压扰动以及对负载跳变动态响应好的优点。进行了仿真对比并设计了2种控制方法的模拟电路进行实验验证,结果表明理论分析的正确性和前馈型电压模式控制的有效性。 1前馈型电压模式控制逆变器原理 本文研究的对象为单相全桥电压源逆变器,如图1所示。4只功率开关管分为2组,其中VT1和VT4为一组,VT2和VT3为一组,输入直流电压ui经2组开关交替导通和关断,得到输出交流方波电压ud,再经LC低通滤波器后得到交流正弦输出电压uo。假设负载为纯电阻负载,同时忽略电感和电容的串联等效电阻。要使输出电压uo跟踪参考电压信号uref,最基本的控制方法是电压模式闭环反馈PID控制,一般需要引入积分环节来提高稳态精度,仅有比例环节很难实现输出电压稳定跟踪,但是引入积分环节又会带来一些问题,如降低系统稳定性和影响动态性能。此外,在输入端由于实际逆变器中直流输入电压并不是恒定不变的,在仅有反馈的情况下输出电压受输入电压波动的影响。为此,在传统电压模式结构基础上,考虑在无积分环节时仍能保证输出电压的稳态精度,同时引入输入电压前馈来消除其波动对输出电压的影响。本文所提前馈型电压模式控制原理如图2所示,在PWM时引入输入电压前馈,由于稳态时输入/输出电压在一个开关周期存在固有的占空比关系,因此由输入/输出电压可以利用PWM 比较器和积分复位电路得到稳态占空比,即稳态时可得d=g(ui,uo),
啊一直以来对SVPWM原理和实现方法困惑颇多,无奈现有资料或是模糊不清,或是错误百出。经查阅众多书籍论文,长期积累总结,去伪存真,总算对其略窥门径。未敢私藏,故公之于众。其中难免有误,请大家指正,谢谢! 此文的讲解是非常清楚,但是还是存在一些错误,本人做了一些修正,为了更好的理解整个推导过程,对部分过程进行分解,并加入加入7段和5段时调制区别。 1 空间电压矢量调制SVPWM 技术 SVPWM是近年发展的一种比较新颖的控制方法,是由三相功率逆变器的六个功率开关元件组成的特定开关模式产生的脉宽调制波,能够使输出电流波形尽可能接近于理想的正弦波形。空间电压矢量PWM与传统的正弦PWM不同,它是从三相输出电压的整体效果出发,着眼于如何使电机获得理想圆形磁链轨迹。SVPWM技术与SPWM相比较,绕组电流波形的谐波成分小,使得电机转矩脉动降低,旋转磁场更逼近圆形,而且使直流母线电压的利用率有了很大提高,且更易于实现数字化。下面将对该算法进行详细分析阐述。 1.1 SVPWM基本原理 SVPWM 的理论基础是平均值等效原理,即在一个开关周期内通过对基本电压矢量加以组合,使其平均值与给定电压矢量相等。在某个时刻,电压矢量旋转到某个区域中,可由组成这个区域的两个相邻的非零矢量和零矢量在时间上的不同组合来得到。两个矢量的作用时间在一个采样周期内分多次施加,从而控制各个电压矢量的作用时间,使电压空间矢量接近按圆轨迹旋转,通过逆变器的不同开关状态所产生的实际磁通去逼近理想磁通圆,并由两者的比较结果来决定逆变器的开关状态,从而形成PWM 波形。逆变电路如图2-8 示。设直流母线侧电压为Udc,逆变器输出的三相相电压为UA、UB、UC,其分别加在空间上互差120°的三相平面静止坐标系上,可以定义三个电压空间矢量UA(t)、UB(t)、UC(t),它们的方向始终在各相的轴线上,而大小则随时间按正弦规律做变化,时间相位互差120°。假设Um为相电压有效值,f为电源频率,则有: (2-27) 其中,,则三相电压空间矢量相加的合成空间矢量U(t)就可以表示为:(2-28) 可见U(t)是一个旋转的空间矢量,它的幅值为相电压峰值的1.5倍,Um为相电压峰值,且以角频率ω=2πf按逆时针方向匀速旋转的空间矢量,而空间矢量U(t)在三相坐标轴(a,b,c)上的投影就是对称的三相正弦量。 图2-8 逆变电路 由于逆变器三相桥臂共有6个开关管,为了研究各相上下桥臂不同开关组合时逆变器输出的空间电压矢量,特定义开关函数Sx ( x = a、b、c) 为: (2-30) (Sa、Sb、Sc)的全部可能组合共有八个,包括6个非零矢量Ul(001)、U2(010)、U3(011)、U4(100)、U5(101)、U6(110)、和两个零矢量 U0(000)、U7(111),下面以其中一种开关组合为例分析,假设Sx ( x=? a、b、c)= (100),此时 (2-30) 求解上述方程可得:Uan=2Ud /3、UbN=-U d/3、UcN=-Ud /3。同理可计算出其它各种组合下的空间电压矢量,列表如下: 表2-1 开关状态与相电压和线电压的对应关系
题目:光伏并网逆变器控制策略的研究
光伏并网逆变器控制策略的研究 摘要 世界环境的日益恶化和传统能源的日渐枯竭,促使了对新能源的开发和发展。具有可持续发展的太阳能资源受到了各国的重视,各国相继出台的新能源法对太阳能发展起到推波助澜的作用。其中,光伏并网发电具有深远的理论价值和现实意义,仅在过去五年,光伏并网电站安装总量已达到数千兆瓦。而连接光伏阵列和电网的光伏并网逆变器便是整个光伏并网发电系统的关键。 本文通过按主电路分类、按功率变换级数分类和按变压器分类的三大类划分逆变器的方法分别介绍了每个逆变器电路的拓扑结构。之后本文首先介绍了国内外并网逆变器的研究状况以及相关并网技术标准,比较了当前主流的控制技术。然后,详细的阐述了光伏并网发电逆变器系统的整体设计和各单元模块的设计,其中包括太阳能电池组、升压斩波电路、逆变电路和傅里叶变换。 在简要介绍了系统的结构拓扑和控制要求之后,论文重点研究了基于电流闭环的矢量控制策略,阐述了其拓扑结构、工作原理及运行模式。为了深入研究控制策略,分别建立了基于电网电压定向的矢量控制和基于虚拟磁链定向的矢量控制。最后,本文针对几种产生谐波的原因,对L、LC、LCL 三种滤波器进行了比较分析。 最后,本文对光伏并网的总系统进行了MATLAB仿真,由于时间的限制,只做出了通过间接控制电流从而达到控制有功无功公功率的仿真。 关键词:光伏并网,逆变器电路拓扑,电流矢量控制,谐波
PHOTOVOLTAIC (PV) GRID INVERTER CONTROL STRATEGY RESEARCH Abstract World deteriorating environment and the increasing depletion of traditional energy sources prompted the development of new energy and development. Solar energy resources for sustainable development has been national attention, solar countries have contributed to the severity of the introduction of the new energy law developments. Among them, the photovoltaic power generation has profound theoretical and practical significance, only in the past five years,the total installed photovoltaic power plant has reached thousands of megawatts. Connected PV array and grid PV grid-connected inverter is the whole key photovoltaic power generation system. Based classification by main circuit and the power level classification and Division of three categories classified by transformer inverter of methods each inverters circuit topologies are introduced.This article introduces the domestic and foreign research on grid-connected inverters and related technical standards for grid-connected, compared the current mainstream technology.Then detail a grid-connected photovoltaic inverter system design and the modular design, including solar arrays, chop-wave circuit, inverter circuits and Fourier transform. Briefly introduces the system topology and control requirements, this paper focuses on the current loop-based vector control strategies, describes the topological structure, working principle and its operating mode.In order to study the control strategies were established based on power system voltage oriented vector control based on virtual flux-oriented vector control.Finally, for several reasons for harmonic, l, LC, LCL compares and analyses the three types of filters. Keywords:Photovoltaic, inverters circuit topologies, current vector control, harmonic
https://www.doczj.com/doc/b77666662.html,/ 逆变电源广泛运用于各类:电力、通讯、工业设备、卫星通信设备、军用车载、医疗救护车、警车、船舶、太阳能及风能发电领域。 在电路中将直流电转换为交流电的过程称之为逆变,这种转换通常通过逆变电源来实现。这就涉及到在逆变过程中的控制算法问题。 只有掌握了逆变电源的控制算法,才能真正意义上的掌握逆变电源的原理和运行方式,从而方便设计。在本篇文章当中,将对逆变电源的控制算法进行总结,帮助大家进一步掌握逆变电源的相关知识。 逆变电源的算法主要有以下几种。 数字PID控制 PID控制是一种具有几十年应用经验的控制算法,控制算法简单,参数易于整定,设计过程中不过分依赖系统参数,可靠性高,是目前应用最广泛、最成熟的一种控制技术。它在模拟控制正弦波逆变电源系统中已经得到了广泛的应用。将其数字化以后,它克服了模拟PID控制器的许多不足和缺点,可以方便调整PID参数,具有很大的灵活性和适应性。与其它控制方法相比,数字PID具有以下优点:
https://www.doczj.com/doc/b77666662.html,/ PID算法蕴涵了动态控制过程中过去、现在和将来的主要信息,控制过程快速、准确、平稳,具有良好的控制效果。 PID控制在设计过程中不过分依赖系统参数,系统参数的变化对控制效果影响很小,控制的适应性好,具有较强的鲁棒性。 PID算法简单明了,便于单片机或DSP实现。 采用数字PID控制算法的局限性有两个方面。一方面是系统的采样量化误差降低了算法的控制精度;另一方面,采样和计算延时使得被控系统成为一个具有纯时间滞后的系统,造成PID控制器稳定域减少,增加了设计难度。 状态反馈控制 状态反馈控制可以任意配置闭环控制系统的极点,实现了逆变电源控制系统极点的优化配置,有利于改善系统输出的动态品质,具有良好的瞬态响应和较低的谐波畸变率。但在建立逆变器的状态模型时将负载的动态特性考虑在内,因此状态反馈控制只能针对空载和已知的负载进行建模。由于状态反馈控制对系统模型参数的依赖性很强,使得系统的参数在发生变化时易导致稳态误差的出现和以及动态特性的改变。例如对于非线性的整流负载,其控制效果就不是很理想。
三相三电平逆变器 空间电压矢量速记法 张庆范 山东大学 二极管中点箝位式NPC(Neutral Point Clamped)三相三电平逆变器,每相桥臂有四个电力电子器件T1、T2、T3、T4,四个续流二极管D1、D2、D3、D4,二个箝位二极管D5、D6。 每相桥臂可以安排三种开关状态,若用S a 、S b 、S c 表示A、B、C三相桥臂的开关状态,则S a 、S b 、S c应是三态开关变量。 用S a 变量表示A相桥臂开关状态。 若T1、T2断,T3、T4通,S a = 0,A接电源负端,V a0、=-V D/2 若T1、T4断,T2、T3通,S a = 0,A接电源0端,V a0、=0 若T3、T4断,T1、T2通,S a = 0,A接电源正端,V a0、=+V D/2 A相桥臂开关S a开关变量状态 a b c a b c 都有三种开关状态0、1、2(或N、O、P,-1、0、1)。 S a = 0、1、2 S b = 0、1、2 S c = 0、1、2
a S b S c)3,每一种开关状态(S a S b S c)都对应一组确定的电压V a0、V b0、 V c0,从而对应一个确定的空间电压矢量V。 对应的27个特定空间电压矢量是V0、V1、…、V26,定义矢量 (S a S b S c)的各个矢量为: V0(000),V1(001),V2(002),V3(010),V4(011),V5(012),V6(020),V7(021) ,V8(022),V9(100),V10(101),V11(102),V12(110),V13(111),V14(112),V15( 120),V16(121),V17(122),V18(200),V19(201),V20(202),V21(210),V22(211 ), V24(220), V25(212),V26(221),V27(222)。 以上用文字叙述的方法记住这27种空间电压矢量,确实是件不 容易的事,不如发明一种新的快速记忆方法——空间电压矢量速记 法。 空间电压矢量速记法 C相3列9行0、1、2 B相9行3列0、1、2 A相9行3列0、1、2。
采用空间矢量脉宽调制(SVPWM )的开环 VVVF 调速系统的综合实训 一、实验目的 1、理解电压空间矢量脉宽调制(SVPWM )控制的基本原理。 2、熟悉MCKV 电机控制系统的CPU 模块、IPM 模块和机组各部分硬件模块,并确认工作正常。 3、了解SVPWM 变频器运行参数和特性。 二、实验内容: 1、熟悉CCS 编程环境,并在CCS 下编译、下载、运行DSP 软件工程。 2、观察并记录定子磁链周期和频率,并分析他们之间的关系。 3、观测并记录启动时电机定子电流和电机速度波形)(t f i v =与)(t f n =; 三、实验预习要求 1、阅读并掌握三相交流异步电机VVVF 调速系统工作原理。 2、了解电压空间矢量脉宽调制(SVPWM )控制的基本原理。 3、阅读本次实验指导书和实验程序,写好实验预习报告。 4、在MATLAB/Simulinlk 环境中搭好仿真模型,结合本程序LEVEL1功能框图,完成电流速度双闭环系统交流异步电机矢量控制仿真。 四、实验原理 当用三相平衡的正弦电压向交流电动机供电时,电动机的定子磁链空间矢量幅值恒定,并以恒速旋转,磁链矢量的运动轨迹形成圆形的空间旋转矢量(磁链圆)。SVPWM 就是着眼于使形成的磁链轨迹跟踪由理想三相平衡正弦波电压源供电时所形成的基准磁链圆,使逆变电路能向交流电动机提供可变频电源,实现交流电动机的变频调速。 现在以实验系统中用的电压源型逆变器为例说明SVPWM 的工作原理。三相逆变器由直流电源和6个开关元件( MOSFET) 组成。图1是电压源型逆变器的示意图。 图1 电压源型逆变器示意图
对于每个桥臂而言,它的上下开关元件不能同时打开,否则会因短路而烧毁元器件。其中A 、B 、C 代表3 个桥臂的开关状态,当上桥臂开关元件为开而下桥臂开关元件为关时定义其状态为1 ,当下桥臂开关元件为开而上桥臂开关元件为关时定义其状态为0。这样A 、 B 、 C 有000 、001 、010 、011 、100 、101 、110 、111共 8种状态。逆变器每种开关状态对应不同的电压矢量,根据相位角不同分别命名为U 0(000)、U 1(100)、U 2(110)、U 3(010)、U 4(011)、U 5(001)、U 6(101)、U 7(111)如图2所示。 图2 基本电压空间矢量 其中U 0(000)和U 7(111)称为零矢量,位于坐标的原点,其他的称为非零矢量,它们幅值相等,相邻的矢量之间相隔60°。如果按照一定顺序选择这六个非零矢量的电压空间矢量进行输出,会形成正六边形的定子磁链,距离要求的圆形磁链还有很大差距,只有选择更多的非零矢量才会使磁链更接近圆形。 SVPWM 的关键在于用8个基本电压空间矢量的不同时间组合来逼近所给定的参考空间电压矢量。在图3中对于给定的输出电压U ,用它所在扇区的一对相邻基本电压x U 和60 x U 来等效。此外当逆变器单独输出零矢量时,电动机的定子磁链矢量是不动的。根据这个特点,可以在载波周期内插入零矢量,调整角频率,从而达到变频目的。 图3 电压空间的线性组合
三维空间矢量原理说明 0 引言 以往有很多关于不同脉宽调制技术的研究,如正弦波PWM 、跟踪型PWM 和空间矢量调制技术等。但这些只局限在αβ二维,而二维调制技术是无法解决三相四线系统中的中线电流问题。随着用户电力技术的发展,应用于三相四线系统中的UPS 和电能质量补偿器将会得到更多的重视。 本文基于中点引出式三桥臂逆变器,提出一种三维空间矢量脉宽调制(3D SVPWM )方法。这种方法不但可以使中点引出式三桥臂逆变器在应用于三相四线系统时能同时补偿三相谐波和中线电流,还具有开关频率低、补偿效果好等优点。 1 三维空间电压矢量的分布 图1所示是一个并联在三相四线系统中的中点引出式三相电压逆变器。 图1所示逆变器其直流侧零线与系统中线相连接。本文所有关于三维空间适量的讨论都将基于这种中点引出式的三桥臂逆变器结构。 图1中,同一桥臂的2个开关的导通与关断是互补的。若用1表示上半桥臂开关导通,-1表示下半桥臂导通,则可定义开关函数为: ?? ?-=下半桥臂导通 上半桥臂导通1 1j S (1) 假定上半桥臂和下半桥臂的直流电压值相等,dc dc2dc1V V V ==, 此时,每个桥臂的输出电压可以表示为: j dc S V =0U (2) 三维αβ0坐标系中的瞬时电压矢量可以利用下式给出的α-β-0变换得到:
????????????????????-- - =???? ??????c b a v v v v v v 212 12 123232 12 1001 32βα (3) 由此,αβ0座标下的瞬时电压矢量可以表示为: ()00312132dc V v n S n S n S ++=ββα α (4) 式中:2/2/c b a S S S S --=α,c b S S S -=β,c b a S S S S ++=0 表1中列出了三维系统中的电压矢量以及经过αβ0变换后在其直角坐标中的参数。 从图2所示的三维视图中可以更清楚地看出电压矢量的分布。其中矢量},,{642V V V 和},,{531V V V 分别处于不同的水平面上,而2个零矢量分别指向零轴的正方向和负方向。图3是三维空间电压矢量在αβ平面上的分布,可以看出它与传统的二维空间电压矢量的分布是一样的。 2 二维和三维电压矢量的比较 二维的αβ变换实际上是对于三维αβ0变换在不考虑零序分量时的一种简化,可以推想二维的电压脉宽调制也是一种对三维调制的简化。根据表1所给的参数和图2、图3, 传统的二维坐标系中的电压矢量分布应该就是三维电压分布的俯
任务2:两电平电压源逆变器空间矢量调制方案 周乐明 学号:S1******* 电气2班 摘要 提出了三相两电平逆变器的空间矢量调制方法,详细讨论了两 电平逆变器的工作原理及空间矢量调制的基本原理,并给出一个具体的仿真实例,通过仿真 ,可以得出实际运行中的电压、电流的波形,而且在文中给出了实例的电路原理图,使得对 于空间矢量调制的原理得以更加清楚的认识。 1. 两电平电压源逆变器空间矢量调制 1.1 结构试图 三相电压型逆变器电路原理图如图2.1所示。定义开关量a ,b ,c 和a ',b ',c '表示6个功率开关管的开关状态。当a ,b 或c 为1时,逆变桥的上桥臂开关管开通,其下桥臂开关管关断(即a ',b '或c '为0);反之,当a ,b 或c 为0时,上桥臂开关管关断而下桥臂开关管开通(即a ',b '或c '为1)。由于同一桥臂上下开关管不能同时导通,则上述的逆变器三路逆变桥的组态一共有8种。对于不同的开关状态组合(abc ),可以得到8个基本电压空间矢量。各矢量为: 22j j dc 33out 2()3 U U a be ce ππ-=++ (2-1) 则相电压V an 、V bn 、V cn ,线电压V ab 、V bc 、V ca 以及out ()U abc 的值如下表2-1所示(其中U dc 为直流母线电压)。 a c' b' a'b c U dc A B C N Z 图2.1 三相电压型逆变器原理图 表2-1 开关组态与电压的关系 a b c V an V bn V cn V ab V bc V ca out U 0 0 0 0 0 0 0 0 0 0 1 2U dc /3 -U dc /3 -U dc /3 U dc -U dc dc 23 U
摘要:阐述了一种小功率光伏并网逆变器的控制系统。该光伏并网逆变器由DC/DC变换器与DC/AC变换器两部分组成,其中DC/DC变换器采用芯片SG3525来控制,DC/AC变换器采用数字信号处理器TMS320F240来控制。由于DSP实时处理能力极强,采用合适的算法能确保逆变电源的输出功率因数非常接近1,输出电流为正弦波形。该控制方案已经在实验室得到验证。 1 引言 21世纪,人类将面临着实现经济和社会可持续发展的重大挑战。在有限资源和保护环境的双重制约下能源问题将更加突出,这主要体现在:①能源短缺;②环境污染;③温室效应。因此,人类在解决能源问题,实现可持续发展时,只能依靠科技进步,大规模地开发利用可再生洁净能源。太阳能具有储量大、普遍存在、利用经济、清洁环保等优点,因此太阳能的利用越来越受到人们的广泛重视,成为理想的替代能源。文中阐述的功率为200W太阳能光伏并网逆变器,将太阳能电池板产生的直流电直接转换为220V/50Hz的工频正弦交流电输出至电网。 2 系统工作原理及其控制方案 2.1 光伏并网逆变器电路原理 太阳能光伏并网逆变器的主电路原理图如图1所示。在本系统中,太阳能电池板输出的额定电压为62V的直流电,通过DC/DC变换器被转换为400V直流电,接着经过DC/AC 逆变后就得到220V/50Hz的交流电。系统保证并网逆变器输出的220V/50Hz正弦电流与电网的相电压同步。 图1 电路原理框图 2.2 系统控制方案 图2为光伏并网逆变器的主电路拓扑图,此系统由前级的DC/DC变换器和后级的DC/AC逆变器组成。DC/DC变换器的逆变电路可选择的型式有半桥式、全桥式、推挽式。考虑到输入电压较低,如采用半桥式则开关管电流变大,而采用全桥式则控制复杂、开关管功耗增大,因此这里采用推挽式电路。DC/DC变换器由推挽逆变电路、高频变压器、整流电路和滤波电感构成,它将太阳能电池板输出的62V的直流电压转换成400V的直流电压。 图2 主电路拓扑图