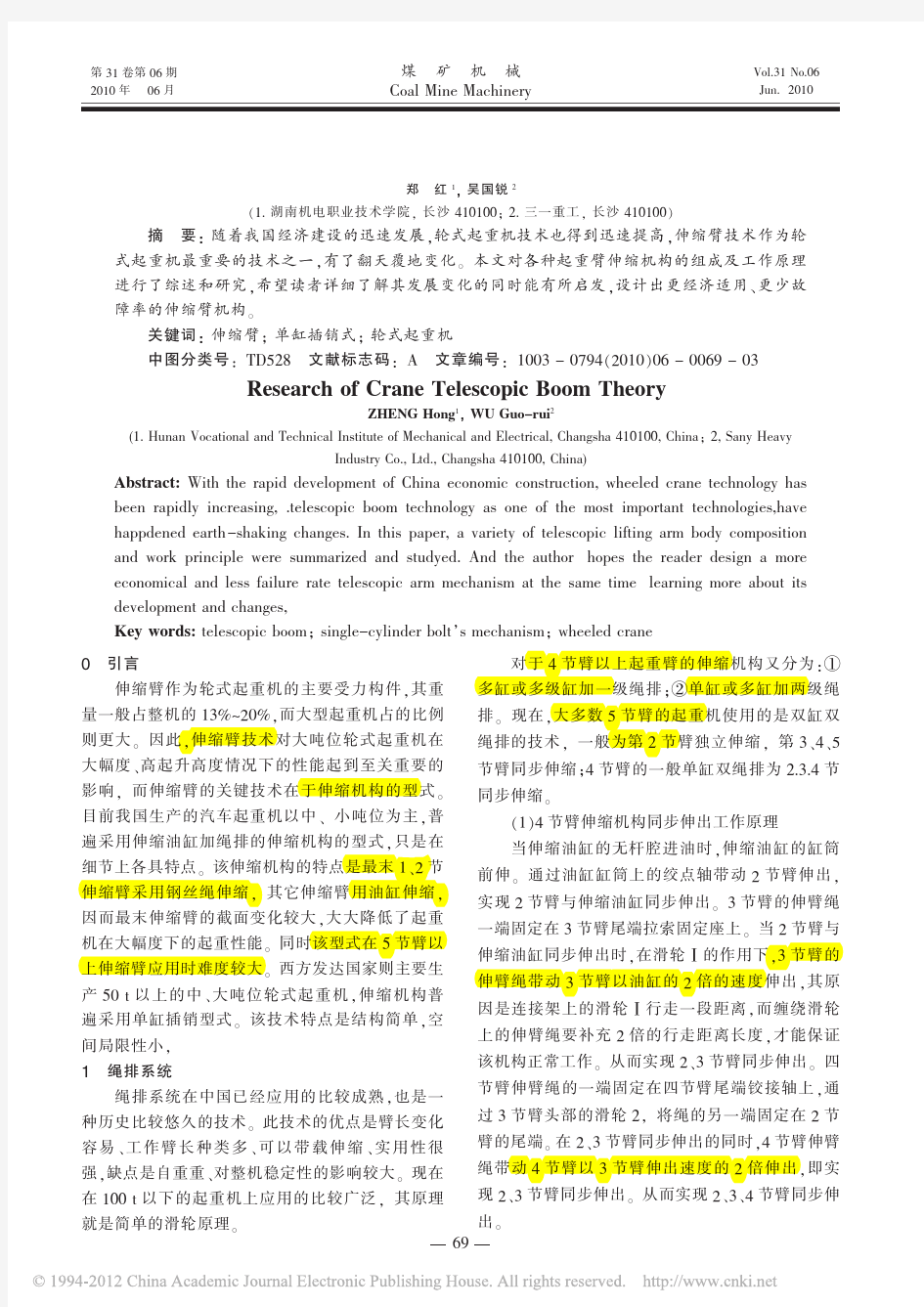
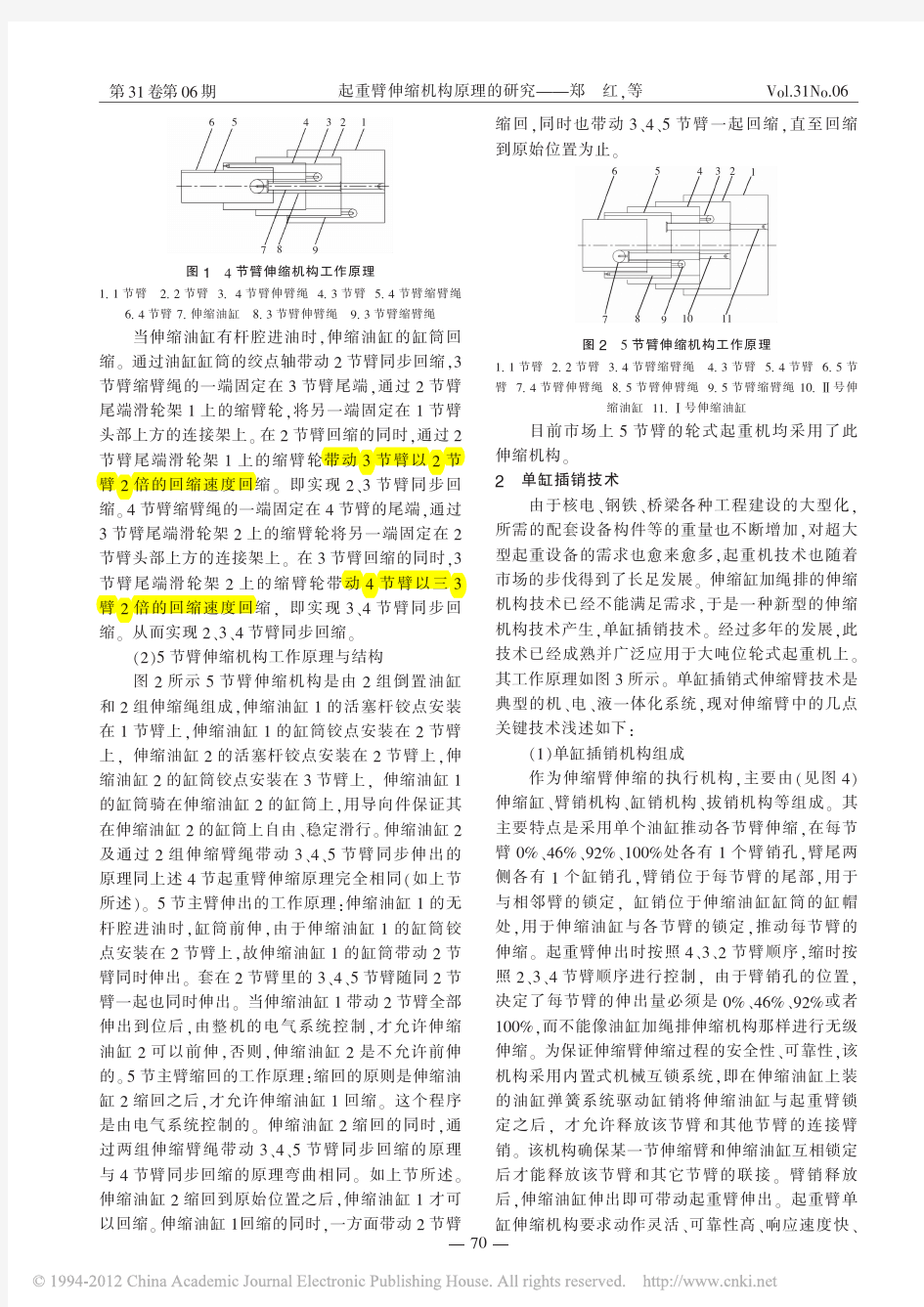
起重机伸缩臂的结构原理 起重机是利用吊臂顶端的滑轮组支承卷扬钢丝绳悬挂重物,利用吊臂的长度和倾角的变化改变起升高度和工作半径,汽车起重机的吊臂是起重机最重要的部分。虽然吊臂的作用都是悬挂和搬运物体,但是不同的吊臂结构和技术,使起重机的性能和效率有很大的不同。 汽车起重机的吊臂一般包括主臂和副臂两部分。主吊臂主要有两种类型,一种是由型材和管材焊接而成的桁架结构吊臂,一种是有各种断面的箱型结构吊臂。随着汽车起重机的发展,现在大部分的汽车起重机主吊臂都是箱型结构,只有少部分是桁架结构。副臂的作用是,当主臂的高度不能满足需要时,可以在主臂的末端连接副臂,达到往高处提升物体的目的。副臂只能提升较轻的物体。副臂一般只有一节臂,也有两节以上的折叠式副臂或伸缩式副臂,其中以折叠式的桁架结构副臂最为常见。 汽车起重机的吊臂伸缩形式有以下几种: 1、顺序伸缩机构–伸缩臂的各节臂以一定的先后次序逐节伸缩。 2、同步伸缩机构–伸缩臂的各节臂以相同的相对速度进行伸缩。 3、独立伸缩机构–各节臂能独立进行伸缩的机构。 4、组合伸缩机构–当伸缩臂超过三节时,可以同时采用上列的任意两种伸缩方式进行伸缩的机构。 无销全液压伸缩机构的优点是臂长变化容易,工作臂长种类多,实用性很强。缺点是自重大,对整机稳定性的影响较大。 无销全液压伸缩机构有不同的组合形式,可以是多液压缸加一级绳排,可以是单液压缸或多液压缸加两级绳排。 多液压缸加一级绳排的特点是最末一节伸缩臂采用钢丝绳伸缩,其它伸缩臂采用多级缸或多个单级缸或多级缸和单级缸套用等方式直接用油缸伸缩。因而最末伸缩臂的截面变化较大,其它臂节截面的变化较小。 1.绳排系统 绳排系统在中国已经应用的比较成熟,也是一种历史比较悠久的技术。此技术的优点是臂长变化容易、工作臂长种类多、可以带载伸缩、实用性很强,缺点是自重重、对整机稳定性的影响较大。现在在100吨以下的起重机上应用的比较广泛,其原理如图,就是简单的滑轮原理。对于四节臂以上起重臂的伸缩机构又分为以下两种:多缸或多级缸加一级绳排、单缸或多缸加两级绳排。DEMAG和TADANO部分产品采用第一种伸缩机构,这种伸缩机构的特点是最末一节伸缩臂采用钢丝绳伸缩,其它伸缩臂采用多级缸或多个单级缸或多级缸和单级缸套用等方式直接用液压缸伸缩。因而最末伸缩臂的截面变化较大,其它臂节截面的变化较小。在过去,徐重、浦沅、长起跟随LIEBHERR技术多年,普遍使用第二种伸缩机构,使用单缸或双缸加绳排实现四节或五节臂的伸缩。这种伸缩方式在国内最先进,但解决五节臂以上起重臂的伸缩难度很大。北起、泰起、锦重等厂家采用第一种伸缩机构(多个单级缸加一级绳排),但由于技术落后,第二缸、第三缸的进回油依靠软管卷筒输送。现在,大多数5节臂的起重机使用的是双缸双绳排的技术,一般为第2节臂独立伸缩,第3.4.5节臂同步伸缩;4节臂的一般单缸双绳排为2.3.4节同步伸缩。其局限性在于最末一、二节伸缩臂采用钢丝绳伸缩,其它伸缩臂用油缸伸缩,因而最末伸缩臂的截面变化较大,大大降低了起重机在大幅度下的起重性能;同时,对于大吨位的起重机,对钢丝绳的要求也非常高,符合要求钢丝绳非常难加工。虽然有些日本企业有将绳排技术发展到6节甚至更多,但是对于中大吨位起重机,一般企业还是优先考虑单缸插销技术。 2.单缸插销系统 单缸插销式伸缩臂技术是典型的机、电、液一体化系统.以较典型的德国利勃海尔为例,作为伸缩臂伸缩的执行机构,主要由(见图)1.伸缩缸、2.拔销机构、3.缸销等组成,为保证伸缩臂伸缩过程的安全性、可靠性,该机构采用内置式互锁系统即在伸缩油缸上装的弹簧驱动缸销销定伸缩臂后,才机械释放该节臂和其他节臂的连接。该方式确保某一节伸缩臂和伸缩油缸互相锁定后才能释放该节臂和其它节臂的联接。利勃海尔将拔销装置置于伸缩机构上方,其优点是结构简单,自锁性强,便于实现;格鲁夫GROVE、德马格(DEMAG)、多田野(TADANO&FAUN)将拔销装置置于伸缩机构两侧,结构布置上比较困难,对加工、装配精度要求高,插拔销难度相对较大。缸销则都布置在伸缩机构的侧方。单缸伸缩机构要求动作灵活、可靠性高、响应速度快、互锁性好,否则,很难实现吊臂的可靠伸缩。此技术采用单缸、互锁的缸销和臂销、精确测长电子技术,优点是重量最轻,对整机稳定性的影响最小,但技术难度大、成本较高、臂长种类少、伸缩时间长、臂长变化时麻烦。现在,徐重和浦沅等国内企业也成功研制出了此项技术,采用的是和LIEBHERR相似的拔销装置置于伸缩机构上方的形式。由于此技术对于电液的要求较高,尤其是在自动伸缩的PLC控制和伸缩系统的液压回路的设计上,国内企业的技术还不是太成熟,可靠性还不是太高,还有较长的路去走。 这里有个单缸插销系统的动画演示,是TADANO的,可以看一看,
论文 论文题目:汽车起重机伸缩臂系统综述 姓名 学号 学院 班级 专业
汽车起重机伸缩臂系统综述 摘要:随着经济建设的迅速发展,我国的基础建设力度正逐渐加大,道路交通,机场,港口,水利水电,市政建设等基础设施的建设规模也越来越大,市场汽车起重机的需求也随之增加。汽车起重机为安装在标准式或特制汽车底盘上的起重设备。而臂架是起重机的主要承载构件。起重机通过臂架直接吊载,实现大的作业高度与幅度。臂架的强度决定了最大起重量时整机起重性能,其自重直接影响整机倾覆稳定性,因而臂架结构设计的优劣,将直接影响整机的性能,如整机重量、整机重心高度和整机稳定性等。所以要在保证臂架安全工作的条件下尽量减轻臂架的重量,这对提高整机质量和经济性具有很大的现实意义。针对徐工50t汽车起重机伸缩机构的分析和研究,从而改进汽车起重机的整机性能,降低成本,同时提高了起重机的作业能力及使用经济性。目前伸缩臂机构有两种形式,绳排系统和单缸插销式。绳排系统在中国已经应用的比较成熟,也是一种历史比较悠久的技术。此技术的优点是臂长变化容易、工作臂长种类多、可以带载伸缩、实用性很强,缺点是自重重、对整机稳定性的影响较大。 关键词:伸缩臂;液压缸;臂架结构 Abstract:Boom is the main host of crane components. Directly through the jib crane hanging load, to achieve great height and range operations. Arm strength determines the maximum time from the weight lifting machine performance, its weight directly affect the machine overturning stability, structural design and therefore merits of boom, will directly affect the overall performance, such as the weight of the whole machine center of gravity height and machine stability. Thus, to ensure safe working conditions of boom to minimize the weight of boom, which improves overall quality and economy of great practical significance. Keywords:Telescopic boom; hydraulic cylinder; Structure of boom . 1.1QY40全液压起重机主要技术参数 整机主要性能参数 最大起重量*幅度 40t*3m 最大起升高度 46 m 滑轮组倍率 11 主臂长 11-33.5m(4节) 主臂全程伸缩时间 162Sec 主臂变幅范围 -2-80degree 主臂变幅时间 60Sec 主卷扬单绳速度 0-110 m/min 副卷扬单绳速度 >40 m/min M最大起升力矩 1401 kN.m 最大回转速度 0-2.0 r/min 最高行驶速度 68 km/h 最大爬坡度 37%
起重机伸缩臂绳排伸缩机构伸缩原理 主臂的伸缩机构很多,可以从两种角度进行分类,即按驱动形式的不同,以及各节臂间的伸缩次序关系不同进行分类。 按驱动形式的不同,可分为液压、液压—机械和人力三种。采用液压驱动时,执行元件选用液压油缸,利用缸体和活塞杆的相对运动推动,推动下节臂的伸缩,在设计三节臂伸缩机构时,为了减轻重量,还可以利用吊臂之间的伸缩比例,采用钢丝绳和滑轮组实现第三节臂的伸缩,以实现第三节臂的伸缩,这就形成了液压机械驱动。在某些情况下可以取消伸缩机构,代之采用人力驱动,或采用推杆和绳索的器件,而辅之以人工安装插销等方法伸缩吊臂,这就形成了人力驱动。这几种方法往往在小于等于三节臂的情况下使用。 对于拥有三节或三节以上的吊臂来讲,各节臂的伸缩方式可以由不同的选择,但是,由前面提到的大致可以分为三类。 (1)顺序伸缩:指吊臂在伸缩过程中,各节伸缩臂必须按一定先后顺序,完成伸缩动作。 (2)同步伸缩:指吊臂在伸缩过程中,各节伸缩臂同时以相同的形成比例进行伸缩。(3)独立伸缩:指吊臂在伸缩过程中,各节臂均能独立进行伸缩。显然,独立伸缩构,同样也可以完成顺序伸缩或同步伸缩的动作。 在现实中,三节伸缩臂或三节以上的伸缩机构,往往式上述几种伸缩机构的中和,而很少单独采用某一种伸缩机构。在三节伸缩臂时,基本上采用一个液压缸加一个滑轮组的同步伸缩机构。超过三节臂时,常用两个液压缸加一个滑轮组的伸缩机构,或采用三个液压缸的伸缩机构,五节臂时为两个液压缸加两个滑轮组,或最后一节的伸缩可用手动的或简单的插销式伸缩机构。 本次设计的四节臂伸缩,采用后种方法过于落后,顾采用第一种方法。即,用一个液压缸加两个滑轮组的伸缩方式。传动方案如图3.1
履带伸缩臂吊车多少钱 随着科技水平的发展,履带伸缩臂吊车生产厂家也是多种多样,不同的生产厂家具有不同的生产技术、不同的材质,使得产品的价格也参差不齐。小编建议选择性价比高的产品,而非仅仅价格便宜的产品。 底盘是履带式底盘,上装是轮式伸缩臂起重机(吊车),这种新型起重机越来越受到国内吊装公司的青睐,它叫“伸缩臂履带起重
机”,90年代起源于欧洲,目的仅仅用于野外风电设别吊装,但随着技术的不断完善,应用范围越来越广,其无可比拟的优点越来越被人们所熟知而在国外迅速流行。 这款起重机(吊车)目前在国外很流行,但在国内还基本处于空白。伸缩臂履带起重机作为特种起重机械,在山地、湿地、沼泽、沙漠、森林、油田、建筑工地、桥梁工地、公路铁路工地等作业场地松软、凹凸不平、空间狭窄的场合使用,也能用于常规吊装作业。 而现在,在桥梁建设、工厂内作业、服务作业、输送机的组装和电力输送线的建设、机场、高速公路和铁路建设对伸缩臂履带起重机(吊车)的需求也在极速增长。 伸缩臂履带起重机与轮式起重机比相较最大的优点是起重作业
时不用打支腿,不论什么地方作业,遇到反复移动机位的情况时,它可以带载行走,同时履带还能进行变轨,在狭窄的工况中都能游刃有余,大大节约时间,提高生产率。 与履带起重机相比,它不必在工地上组装和架设臂架,同时吊臂根据施工需要可自由变化长度,安装方便快捷,便于运输,而且运输成本极低。 河南斯派特机械设备有限公司创立于2015年,由德国HXC集团参与投资和研发,是一家集研发,生产,销售微型履带起重机于一体的专业性公司。SPT品牌充分注重产品的安全性,实用性,功能性。该公司系列产品SPT299,SPT499一经推出就受到了广大客户的一致好评。 同类型的产品比质量,同质量的产品比价格,同样的价格比服务。河南斯派特机械设备有限公司为您提供出厂的价格,高质量的产品,让您买的放心、用的安心。
汽车起重机吊臂结构与伸缩原理 发布日期:2012-05-03 来源:网络我要评论(0) 核心提示:汽车起重机的吊臂是起重机最重要的部分,起重机是利用吊臂顶端的滑轮组支承卷扬钢丝绳悬挂重物,利用吊臂的长度和倾角的变化改变起升高度和工作半径。虽然吊臂的作用都是悬挂和搬运物体,但是不同的吊臂结构和技术,使起重机的性能和效率有很大的不同。 汽车起重机的吊臂是起重机最重要的部分,起重机是利用吊臂顶端的滑轮组支承卷扬钢丝绳悬挂重物,利用吊臂的长度和倾角的变化改变起升高度和工作半径。虽然吊臂的作用都是悬挂和搬运物体,但是不同的吊臂结构和技术,使起重机的性能和效率有很大的不同。 一、汽车起重机的吊臂结构 汽车起重机的吊臂一般包括主臂和副臂两部分。汽车起重机主吊臂主要有两种类型,一种是由型材和管材焊接而成的桁架结构吊臂,一种是有各种断面的箱型结构吊臂。随着汽车起重机的发展,现在大部分的汽车起重机主吊臂都是箱型结构,只有少部分是桁架结构。 汽车起重机副臂的作用是,当主臂的高度不能满足需要时,可以在主臂的末端连接副臂,达到往高处提升物体的目的。副臂只能提升较轻的物体。副臂一般只有一节臂,也有两节以上的折叠式副臂或伸缩式副臂,其中以折叠式的桁架结构副臂最为常见。 二、汽车起重机的吊臂伸缩原理 (一)汽车起重机的吊臂伸缩形式有以下几种: 1、顺序伸缩机构--伸缩臂的各节臂以一定的先后次序逐节伸缩。 2、同步伸缩机构--伸缩臂的各节臂以相同的相对速度进行伸缩。 3、独立伸缩机构--各节臂能独立进行伸缩的机构。 4、组合伸缩机构--当伸缩臂超过三节时,可以同时采用上列的任意两种伸缩方式进行伸缩的机构。 (二)汽车起重机按伸缩机构的技术分,可以分为无销全液压伸缩机构和自动插销式伸缩机构。
伸缩臂式履带起重机抗倾覆稳定性研究 通过对伸缩臂式履带起重机的抗倾覆稳定性进行分析,得出试验前抗倾覆稳定性的校核计算方法,总结出整机抗倾覆稳定性试验方法,在实际生产中将校核计算结果和试验方法进行验证。 标签:履带起重机;抗倾覆稳定性;载荷;试验方法 伸缩臂式履带起重机(以下简称伸缩臂起重机)作为流动式起重机的一种,是将伸缩臂式汽车起重机的伸缩臂部分与桁架式履带起重机的履带式行走装置部分结合的产物,以其臂长转换快捷、可实现带载行走的优点被市场广泛认识并接受。 伸缩臂起重机的抗倾覆稳定性是指起重机在自重和外载荷的作用下抵抗倾覆的能力,是影响起重机使用性能、保证安全使用的重要指标,也是保证伸缩臂起重机安全工作的充要条件之一。 为确保伸缩臂起重机的安全使用,不仅需要在试验前通过校核计算确保其抗倾翻稳定性合格,同时也要在通过试验对其抗倾覆稳定性进行校核。 1 抗倾覆稳定性校核计算条件、试验条件及要求 伸缩臂起重机抗倾覆稳定性校核计算、试验条件及要求如下: (1)起重机在整机指定位置处必须安装上设计规定的工作状态时的全部工作装置; (2)环境温度范围-20℃~+40℃,工作场地海拔高度不超过1000m; (3)抗倾覆稳定性试验时,风速不大于8.3m/s; (4)工作场地地面应水平、坚实、平整,地面倾斜度不大于1%,地面及支撑面的承载能力必须大于起重机工作时所产生的接地比压; (5)试验载荷应标定准确,垂直载荷相对标定值允差为±0.5%,水平载荷相对标准值允差为±1.5% 2 抗倾覆稳定性校核计算方法 伸缩臂起重机再进行抗倾覆实验之前,为确保试验安全、有效的进行,需要对伸缩臂起重机起升性能表的额定载荷的抗倾覆能力进行校核计算。 2.1 抗倾覆稳定性条件
起重机伸缩臂绳排伸缩原理
起重机伸缩臂绳排伸缩机构伸缩原理 主臂的伸缩机构很多,可以从两种角度进行分类,即按驱动形式的不同,以及各节臂间的伸缩次序关系不同进行分类。 按驱动形式的不同,可分为液压、液压—机械和人力三种。采用液压驱动时,执行元件选用液压油缸,利用缸体和活塞杆的相对运动推动,推动下节臂的伸缩,在设计三节臂伸缩机构时,为了减轻重量,还可以利用吊臂之间的伸缩比例,采用钢丝绳和滑轮组实现第三节臂的伸缩,以实现第三节臂的伸缩,这就形成了液压机械驱动。在某些情况下可以取消伸缩机构,代之采用人力驱动,或采用推杆和绳索的器件,而辅之以人工安装插销等方法伸缩吊臂,这就形成了人力驱动。这几种方法往往在小于等于三节臂的情况下使用。 对于拥有三节或三节以上的吊臂来讲,各节臂的伸缩方式可以由不同的选择,但是,由前面提到的大致可以分为三类。 (1)顺序伸缩:指吊臂在伸缩过程中,各节伸缩臂必须按一定先后顺序,完成伸缩动作。 (2)同步伸缩:指吊臂在伸缩过程中,各节伸缩臂同时以相同的形成比例进行伸缩。(3)独立伸缩:指吊臂在伸缩过程中,各节臂均能独立进行伸缩。显然,独立伸缩构,同样也可以完成顺序伸缩或同步伸缩的动作。 在现实中,三节伸缩臂或三节以上的伸缩机构,往往式上述几种伸缩机构的中和,而很少单独采用某一种伸缩机构。在三节伸缩臂时,基本上采用一个液压缸加一个滑轮组的同步伸缩机构。超过三节臂时,常用两个液压缸加一个滑轮组的伸缩机构,或采用三个液压缸的伸缩机构,五节臂时为两个液压缸加两个滑轮组,或最后一节的伸缩可用手动的或简单的插销式伸缩机构。 本次设计的四节臂伸缩,采用后种方法过于落后,顾采用第一种方法。即,用一个液压缸加两个滑轮组的伸缩方式。传动方案如图3.1
汽车起重机伸缩臂系统综述
————————————————————————————————作者:————————————————————————————————日期:
论文 论文题目:汽车起重机伸缩臂系统综述 姓名 学号 学院 班级 专业
汽车起重机伸缩臂系统综述 摘要:随着经济建设的迅速发展,我国的基础建设力度正逐渐加大,道路交通,机场,港口,水利水电,市政建设等基础设施的建设规模也越来越大,市场汽车起重机的需求也随之增加。汽车起重机为安装在标准式或特制汽车底盘上的起重设备。而臂架是起重机的主要承载构件。起重机通过臂架直接吊载,实现大的作业高度与幅度。臂架的强度决定了最大起重量时整机起重性能,其自重直接影响整机倾覆稳定性,因而臂架结构设计的优劣,将直接影响整机的性能,如整机重量、整机重心高度和整机稳定性等。所以要在保证臂架安全工作的条件下尽量减轻臂架的重量,这对提高整机质量和经济性具有很大的现实意义。针对徐工50t汽车起重机伸缩机构的分析和研究,从而改进汽车起重机的整机性能,降低成本,同时提高了起重机的作业能力及使用经济性。目前伸缩臂机构有两种形式,绳排系统和单缸插销式。绳排系统在中国已经应用的比较成熟,也是一种历史比较悠久的技术。此技术的优点是臂长变化容易、工作臂长种类多、可以带载伸缩、实用性很强,缺点是自重重、对整机稳定性的影响较大。 关键词:伸缩臂;液压缸;臂架结构 Abstract:Boom is the main host of crane components. Directly through the jib crane hanging load, to achieve great height and range operations. Arm strength determines the maximum time from the weight lifting machine performance, its weight directly affect the machine overturning stability, structural design and therefore merits of boom, will directly affect the overall performance, such as the weight of the whole machine center of gravity height and machine stability. Thus, to ensure safe working conditions of boom to minimize the weight of boom, which improves overall quality and economy of great practical significance. Keywords:Telescopic boom; hydraulic cylinder; Structure of boom . 1.1QY40全液压起重机主要技术参数 整机主要性能参数 最大起重量*幅度 40t*3m 最大起升高度 46 m 滑轮组倍率 11 主臂长 11-33.5m(4节) 主臂全程伸缩时间 162Sec 主臂变幅范围 -2-80degree 主臂变幅时间 60Sec 主卷扬单绳速度 0-110 m/min 副卷扬单绳速度 >40 m/min M最大起升力矩 1401 kN.m 最大回转速度 0-2.0 r/min 最高行驶速度 68 km/h
伸缩臂汽车式起重机型号QAY200 最大额定起重量:200t 最大起升力矩:6774kN.m 整机长度:16130mm 整机宽度:3000mm 整机高度:4000mm 整机总重:71000kg(行驶状态) 一、起重机底盘部分 徐工自行设计并专业化制造的带全宽驾驶室的6桥底盘,最高行驶速度为70km/h; 驱动/转向:12×6×10; 行驶车速:71km/h; 爬坡度:48%。 1.1、车架 徐工自行设计并专业化制造,优化重量比,防扭转箱型结构,进口高强度钢材制造。支腿收缩在特制箱体中,箱体位于1桥和2桥之间以及车架后端。并且具有前后牵引挂钩。 1.2、底盘发动机 制造商:德国奔驰(型号OM502LA.Ⅲ/3); 型式:电控、V形八缸、水冷却、增压中冷、电喷、柴油发动机; 输出功率:390kw/1800rpm; 最大扭矩:2400Nm/1080rpm; 环保性:排放符合欧洲III标准; 燃料箱容量:约400L。 1.3、动力传动系统 1.3.1 变速箱 德国ZF公司的16AS2602变速箱。具有16个前进档和2个倒档,速比范围大,即可满足低速场地和爬坡行驶又可满足高速行驶。机械变速箱自动控制,操纵可自动和手动选择,自动显示当前档位和手动操纵需要更换的档位。 1.3.2 分动箱 分动箱采取大输入扭矩。额定扭矩高达30000N.m。带差速锁气缸。 1.3.3 车桥 1、3轴为转向从动轴, 2、6轴为转向驱动轴,4轴非驱动转向轴,5轴为转向贯通驱动轴,2、6轴带轮间差速器及差速锁,5轴带轴间差速器及差速锁。
1.3.4 传动轴 优化的传动轴布置,传动轴传动平稳、可靠。最优化力传输,采用端面齿联结传动轴,传递扭矩较大,最大可达43500Nm。 1.4、桥悬架 油气悬挂,每根桥承担载荷相当,不高于12t。液压系统调平,底盘可以升高或降低150mm。通过能力强。 1.5、转向 采用德国ZF公司的ZF7421转向器,液压助力系统,保障转向轻便灵活。转向形式为12X10,1、2、3、5、6轴转向。 1.6、轮胎 12.00,进口法国米其林,适用于重型载重车辆。 1.7、制动 行车制动:双回路气压制动,作用于所有车轮; 驻车制动:弹簧贮能制动,作用于3-6轴车轮; 辅助制动:采用发动机辅助制动,安全可靠,延长制动摩擦片使用寿命。 1.8、底盘驾驶室 新型钢结构驾驶室,减震性和封闭性优良,两侧外开式车门。全宽驾驶室视野开阔,空间宽敞。内饰精良舒适,配置安全玻璃,3只雨刷器,大视野后视镜,电控洗窗器,电子门窗升降器,配高级CD音响。驾驶员和副驾驶员航空座椅,可调多种位置。控制仪器和仪表齐全,布置符合人机工程方案。左位方向盘可调节高度和角度,杂物箱,灭火器。 空调:由发动机供热的加热器,除霜风挡。制冷空调。 1.9、液压系统 定量泵通过取力器联接至发动机,以控制转向和液压支腿。 1.10、液压支腿 4点支撑,水平和垂直支腿全液压操纵,电控操纵控制台安装在底盘两侧,控制台装夜光水平仪用于调平起重机,并有照明灯和增速按钮。水平支腿为两级伸缩方式,支腿的支脚用滑动装置收存垂直支腿下。支腿设计用于抬起整个起重机身以使起重机在各种工况条件更好地作业。(不需要第五支腿的情况下可以完成全圆周360度作业); 支撑区域:纵向约9.625m,横向约8.7m。 1.11、电气设备 采用24V直流;电气系统具有国标规定的完整的汽车照明系统;车辆的动作,如油门、支腿操纵等都是通过电气控制实现的,使动作轻便、快捷;电气系统有很强的检测、逻辑、运算等能力,具有故障自诊断、集中显示及自我保护功能;
履带伸缩臂起重机有限元模态对比分析 摘要:针对履带式伸缩臂起重机,建立了整机三维模型,提出了模型简化方案。利用ABAQUS软件对起重机在额定工况下有吊载和无吊载的整机模型进行了模态 分析,得出了10阶共振频率和振型。对两个模型的模态进行对比分析,得出了 起重机起吊后的模态变化,为避免共振现象的发生提供了理论依据。 关键词:履带式伸缩臂起重机、模态分析、有限元法、整机 0.引言 履带式伸缩臂起重机不仅拥有履带式底盘附着力大、转换方便、带载行走的 特点,还结合了伸缩臂架自由调节长度的优点,在当今施工领域具有广泛的应用 市场。为提高公司自主研发的ZTCC550履带式伸缩臂起重机的产品质量,提高产 品的安全性能,本文应用ABAQUS软件对起重机进行了计算模态分析,对比了有 吊载和无吊载情况下起重机整机模态,为起重机在极限工况下避免共振提供了帮助。 1. 有限元模型建立和简化 本文的研究对象为为我公司所设计的ZTCC550履带式伸缩臂起重机的整机模型,基本结构如图1所示[1]。 图1 ZTCC550起重机结构简图 起重机的最大额定载荷为55t,整车整备重量为63t;伸缩臂由5节臂组成, 为U型截面,全伸臂长40.3m;采用履带式底盘,履带架可自由展开,搭载自卸 式配重,可360回转。 本文主要分析最大起重量工况下的起重机模态:主臂全缩,吊臂仰角为74°,起吊载重为55吨。 为了得到更加准确的模态分析结果,对模型进行简化是一个重要环节[2]。本 文针对履带起重机的结构特点对其进行了模型简化: ①钢丝绳和吊钩省略,主臂上不受力的辅助件省略,3、4、5节臂受力等效 作用在各滑轮上; ②两组卷扬卷筒在安装位置(大致的几何中心,可选择卷筒轴线的中点)施 加刚性拉力(适当考虑钢丝绳质量); ③所有原动/驱动部件总成均简化成集中质量,如发动机、油泵等。 ④各液压缸简化成一维刚性单元或高刚度单向弹簧单元(据长度、等效截面积、推力确定刚度),两端由铰接或安装位置而定,等效质量在一维单元两端分 布施加; ⑤驾驶室、上下车配重装置简化成集中质量等效作用在铰接点处; ⑥控制系统、液压小元件及管路省略,小型小质量标准件省略; ⑦各焊接部位需要对焊缝进行处理,填平各坡口,保证焊接部位的连续性。 关键部位(主臂、回转台、底座、履带架等)需要增加角焊缝对连接部位进行强化。 本文为了对比在最大起重量工况下有吊载和无吊载的起重机模态,仅在臂架 头加载不同集中质量以示区别:对于无吊载的工况,臂头仅加载吊钩载荷1.1t; 对于有吊载的工况,臂头加载55t。 起重机优化后的整机模型如图2所示。
五节伸缩臂的结构原理
1.绳排系统 绳排系统在中国已经应用的比较成熟,也是一种历史比较悠久的技术。 此技术的优点是臂长变化容易、工作臂长种类多、可以带载伸缩、实用性很强,缺点是自重重、对整机稳定性的影响较大。 现在在100吨以下的起重机上应用的比较广泛,其原理如图,就是简单的滑轮原理。 对于四节臂以上起重臂的伸缩机构又分为以下两种: 多缸或多级缸加一级绳排、单缸或多缸加两级绳排。 DEMAG和TADANO部分产品采用第一种伸缩机构,这种伸缩机构的特点是最末一节伸缩臂采用钢丝绳伸缩,其它伸缩臂采用多级缸或多个单级缸或多级缸和单级缸套用等方式直接用液压缸伸缩。因而最末伸缩臂的截面变化较大,其它臂节截面的变化较小。 在过去,徐重、浦沅、长起跟随LIEBHERR技术多年,普遍使用第二种伸缩机构,使用单缸或双缸加绳排实现四节或五节臂的伸缩。 这种伸缩方式在国内最先进,但解决五节臂以上起重臂的伸缩难度很大。 北起、泰起、锦重等厂家采用第一种伸缩机构(多个单级缸加一级绳排),但由于技术落后,第二缸、第三缸的进回油依靠软管卷筒输送。 现在,大多数5节臂的起重机使用的是双缸双绳排的技术,一般为第2节臂独立伸缩,第3.4.5节臂同步伸缩;4节臂的一般单缸双绳排为2.3.4节同步伸缩。 其局限性在于最末一、二节伸缩臂采用钢丝绳伸缩,其它伸缩臂用油缸伸缩,因而最末伸缩臂的截面变化较大,大大降低了起重机在大幅度下的起重性能; 同时,对于大吨位的起重机,对钢丝绳的要求也非常高,符合要求钢丝绳非常难加工。 虽然有些日本企业有将绳排技术发展到6节甚至更多,但是对于中大吨位起重机,一般企业还是优先考虑单缸插销技术。 2.单缸插销系统 单缸插销式伸缩臂技术是典型的机、电、液一体化系统.以较典型的德国利勃海尔为例,作为伸缩臂伸缩的执行机构,主要由(见图)1.伸缩缸、2.拔销机构、3.缸销等组成,为保证伸缩臂伸缩过程的安全性、可靠性,该机构采用内置式互锁系统即在伸缩油缸上装的弹簧驱动缸销销定伸缩臂后,才机械释放该节臂和其他节臂的连接。 该方式确保某一节伸缩臂和伸缩油缸互相锁定后才能释放该节臂和其它节臂的联接。 利勃海尔将拔销装置置于伸缩机构上方,其优点是结构简单,自锁性强,便于实现;
目录 摘要---------------------------------------------------------------------------------------------1 前言---------------------------------------------------------------------------------------------2 1. 概述------------------------------------------------------------------------------------------6 1.1 随车起重机用途和特点--------------------------------------------------------------6 1.2 型号意义--------------------------------------------------------------------------------6 1.3 术语解释--------------------------------------------------------------------------------6 1.4 结构原理--------------------------------------------------------------------------------6 2. 伸缩臂架的计算----------------------------------------------------------------------------7 2.1 伸缩臂架的作用载荷及分析---------------------------------------------------------7 2.2 伸缩臂架的临界力的计算------------------------------------------------------------9 2.3 伸缩臂架的刚度校核------------------------------------------------------------------9 2.4 伸缩臂架的强度校核-----------------------------------------------------------------13 2.5 伸缩臂局部稳定性校核--------------------------------------------------------------17 2.6 伸缩臂的整体稳定性校核-----------------------------------------------------------19 3. 回转机构的选型---------------------------------------------------------------------------21 3.1 回转支承的受载情况-----------------------------------------------------------------21 3.2 回转支承选型所需技术参数--------------------------------------------------------21 4. 液压系统的设计计算---------------------------------------------------------------------26 4.1概述---------------------------------------------------------------------------------------26 4.2工作原理---------------------------------------------------------------------------------26 4.3 性能分析--------------------------------------------------------------------------------29 4.4 液压缸主要尺寸的确定--------------------------------------------------------------29 4.5 液压泵的选择--------------------------------------------------------------------------31 4.6 油箱的选择-----------------------------------------------------------------------------32 4.7 管件--------------------------------------------------------------------------------------33 5. 结论与展望---------------------------------------------------------------------------------35 5.1 结论--------------------------------------------------------------------------------------35 5.2 随车起重机的发展趋势--------------------------------------------------------------36 6. 毕业设计总结------------------------------------------------------------------------------38 7. 致谢------------------------------------------------------------------------------------------39 8. 参考文献------------------------------------------------------------------------------------40
开题报告 题目汽车起重机伸缩臂系统设计 1.课题来源 近年来,随着社会的发展,社会生活中对起重机的需求越来越大,所以起重机的研发越来越紧迫,由于汽车式起重机转场灵活,从而方便快捷,所以进几年我国的汽车式起重机发展很快。但是,与国外汽车式起重机相比,国外汽车式起重机技术得到了飞速发展,为了降低整机成本,提高性能,整机质量越来越小,在起重性能相同的情况下,自重约比十年前降低了20%左右,由于车辆自重的减小,使车辆采用尽可能少的轴数(尤其是大吨位起重机),这样,大大简化了车辆的结构,成本降低,同时提高了起重机的作业能力及使用经济性,所以,同等吨位的销售价较前十年有大幅下降,对中国国内市场造成了很大冲击,因此,对我国的汽车式起重机的生产者来说是一个严峻的考验。臂架是起重机的主要承载构件。起重机通过臂架直接吊载,实现大的作业高度与幅度。臂架的强度决定了最大起重量时整机起重性能,其自重直接影响整机倾覆稳定性,因而臂架结构设计的优劣,将直接影响整机的性能,如整机重量、整机重心高度和整机稳定
性等。所以要在保证臂架安全工作的条件下尽量减轻臂架的重量,这对提高整机质量和经济性具有很大的现实意义。 2. 研究目的和意义 臂架是起重机的主要承载构件。起重机通过臂架直接吊载,实现大的作业高度与幅度。臂架的强度决定了最大起重量时整机起重性能,其自重直接影响整机倾覆稳定性,因而臂架结构设计的优劣,将直接影响整机的性能,如整机重量、整机重心高度和整机稳定性等。所以要在保证臂架安全工作的条件下尽量减轻臂架的重量,这对提高整机质量和经济性具有很大的现实意义。 3.国内外现状及发展趋势 中国的汽车式起重机诞生于上世纪的10年代,经过了近30年的发展,期间有过3次主要的技术改进,分别为70年代引进苏联的技术,80年代引进日本的技术,90年代引进德国的技术。但是总体来说,中国的汽车式起重机产业始终走着自主创新的道路,有着自己清晰的发展脉络,尤其是进几年,中国的汽车式起重机产业取得了长足的发展,虽然与国外相比还有一定的差距,但是这个差距正在逐渐的缩小。而且我国目前在中小吨位的汽车式起重机的性能已经完好,能够满足现实生产的要求。在不久的将来,我国的汽车式起重机行业一定会发展成为一个发展稳定,市场化程度高的成熟产业。 许多专家认为,高速发展的市场,是中国汽车式起重机产业各个厂商有利的技术创新基础和环境。近几年,中国汽车式起重机产业除了一家较小的公司与日本起重机品牌厂家合资以外,其余厂家一直在追赶国外先进水平的进程中,一直坚持自主的技术创新道路,基本上没有整体引进国外技术的做法,也使的中国汽车式起重机产业在达到和接近国际先进水平的同时,在产品技术上有明显的中国特质。 中国汽车式起重机已经大量使用PLC可编程集成控制技术,带有总线接口的 液压阀块,液压马达,油泵等控制和执行元件已较为成熟,液压和电器已实现了紧密的结合。可通过软件实现控制性能的调整,大幅度简化控制系统,减少液压元件,提高系统的稳定性,具备了实现故障自动诊断,远程控制的能力。 当前我国新一代汽车起重机产品,起重作业的操作方式,大面积应用先导比例控制,具有良好的微调性能和精控性能,操作力小,不易疲劳。通过先导比例手柄实现比例输送多种负荷的无级调速,有效防止起重作业时的二次下滑现象,极大的提高了起重作业的安全性、可靠性和作业效率。
国内履带起重机产品现状及发展趋势 穆永峰 天津山河装备开发有限公司300400 近年来,我国的电力、铁路、公路、石化、化工、冶金、造船、市政、建筑和汽车等工业投资发力,建设规模空前高涨,建设速度屡攀新高。由于各种工程建设项目大型化发展的趋势,其所需要吊装的配套设备、构件质量等也不断提高,对超大型起重设备的需求也越来越高,市场的需求带动了国产履带式起重机的迅速发展。履带式起重机具有起重量大、可以带载行走、接地比压小、作业灵活等优势,一直是工程吊装施工中不可替代的起重机械。 国内履带起重机产品发展势头迅猛,取得了令世人惊叹的进步。2006年5月,上海三一科技的SCC4000(400吨)成功下线,成为了“神州第一吊”,这个记录半年后即被中联浦沅打破。2009年至2010年,徐工、中联重科、三一科技和抚挖重工的产品全部突破千吨级,实现了中国企业的集体跨越。2011年至2012年,中联重科ZCC3200NP(3200吨)、三一科技SCC86000TM(3600吨)和徐工XGC88000(3600吨)三个世界上最大吨位履带起重机的相继成功下线,打破了国外对于3000吨级履带起重机的垄断,标志着中国履带起重机技术水平上升到了一个前所未有的高度,走在了世界的最前沿。2012年7月17日,国际标准化组织起重机技术委员会(ISO/TC96)秘书处落户中国的中联重科,这是对中国起重机人的肯定,也将使我国更多的起重机械标准提案上升为国际标准,使我国进入了起重机卖标准的时代,极大的推动我国起重机的发展。2012年9月26日最新发布的全球移动式起重机制造十强企业中的第一、第四、第七和第十分别由我国的徐工、中联重科、三一科技和抚挖夺得,标志着我国的起重机行业由制造大国向制造强国的成功转变。 履带起重机是一个拥有高技术含量的产品,国内外的生产企业都是技术实力和资金实力雄厚的知名企业。国内履带起重机研发一般走两条路线,一条是完全自主研发,这方面的优秀企业是上海三一科技;另一条是走企业和高校进行合作,联合研发,国内很多企业都是走的这条路线。在起步阶段,一般都是和大连理工大学联合开发。目前我国生产履带起重机的企业主要有天津山河、上海三一科技、中联重科、徐工建机、抚挖重工、宇通重工、中国南车、福田雷萨、虎霸等。以下是国内主要履带起重机厂家生产的主要机型: 1、天津山河 常规桁架臂产品系列有:QUY55、QUY160。 伸缩臂系列有:SWTC05、SWTC12、SWTC16、SWTC25、SWTC35、SWTC50、SWTC75。强夯机系列有:SWQH320、SWQH500。 2、上海三一科技 常规桁架臂产品系列有:SCC500E、SCC600C、SCC700、SCC750、SCC800C、SCC1000C、SCC1000HD、SCC1250、SCC1500D、SCC1800、SCC2000、SCC2500D、SCC3200、SCC4000、SCC4500、SCC6500、SCC7500、SCC10000D、SCC16000、SCC86000TM。 风电系列产品有:SCC3000WE、SCC5000WE、SCC6500WE。 8系列产品有:SCC8100、SCC8150、SCC8200、SCC8300。 强夯机系列有:SQH320、SQH400。 3、中联重科 常规桁架臂产品系列有:QUY50、QUY70、QUY80、QUY100、QUY160、QUY180、QUY200、QUY260、QUY350、QUY400、QUY450、QUY500W、QUY550、QUY650、QUY800、QUY1000、NCC3200NP。 强夯机系列有:ZTM300、ZTM500。 4、徐工建机 常规桁架臂产品系列有:QUY35-Ⅰ、QUY50、QUY55、QUY70、QUY75、QUY80、QUY100、
毕业设计(论文)题目汽车起重机伸缩臂系统设计 学生姓名肖文涛学号2006105334 专业机械设计制造及自动化班级20061052 指导教师谭宗柒 评阅教师 完成日期2010 年月日
三峡大学学位论文原创性声明 本人郑重声明:所呈交的学士学位论文,是本人在导师的指导下,独立进行研究工作所取得的成果,除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果,对本文的研究做出重要贡献的个人和集体均已在文中以明确方式标明。本人拥有自主知识产权,没有抄袭、剽窃他人成果,由此造成的知识产权纠纷由本人负责。 学位论文作者签名: 日期:2010-5-29 学位论文版权使用受权书 本学位论文作者完全了解学校有关保障、使用学位论文的规定,同意学校保留 并向有关学位论文管理部门或机构送交论文的复印件和电子版,允许论文被查阅和 借阅。本人授权省级优秀学士学位论文评选机构将本学位论文的全部或部分内容编 入有关数据进行检索‘可以采用影印、缩印或扫描等复制手段保存和汇编学位论文。 本学位论文属于: 1、保密□,在年解密后适用本书授权。 2、不保密□。 (请在以上相应方框内打“√”)
目录 前言 (1) 摘要 (2) 1 绪论 (2) 1.1国内外汽车起重机发展概况及趋势 (2) 1.2伸缩臂结构发展现状 (4) 1.3伸缩臂机构形式介绍 (6) 1.4本课题内容及重要意义 (7) 2 QAY50汽车起重机主要技术参数和工作级别 (7) 2.1QAY50起重机主要技术参数 (7) 2.2QAY50汽车起重机的工作级别 (9) 3伸缩臂传动方案和臂架截面的确定 (12) 3.1伸缩臂传动方案的确定 (12) 3.2伸缩臂架截面的确定 (14) 4伸缩臂设计计算 (17) 4.1起重机伸缩臂尺寸的确定 (17) 4.2臂架伸缩液压缸的计算及选择 (22) 4.3伸缩臂受力计算 (25) 5伸缩臂有限元分析 (31) 5.1伸缩吊臂有限元模型建立 (32) 5.2计算结果与分析 (34) 总结 (37) 致谢 (38) 参考文献 (39)