Wear253(2002)
124–129
Friction control between wheel and rail by means of on-board lubrication
Masao Tomeoka a,?,Naoji Kabe a,Masuhisa Tanimoto b,Eiji Miyauchi b,1,Machi Nakata c,2
a Rolling Stock Department,Teito Rapid Transit Authority,3-19-6Higashi Ueno,Taito-ku,Tokyo110-0015,Japan
b Rolling Stock Testing Section,Sumitomo Metal Technology Inc.,1-109,5-Chome,Shimaya,Konohana-ku,Osaka554-8555,Japan
c Sumitomo Metal Industries Ltd.,1-109,5-Chome,Shimaya,Konohana-ku,Osaka554-8555,Japan
Abstract
The purpose of this study is to demonstrate the friction control between wheel and rail can solve wheel/rail contact problems,such as wheel-slipping,rail corrugation,squeak noises,wheel/rail wear and so on.Firstly,fundamental tests with two-roller-rigs were carried out to evaluate the friction performances of several types of friction modi?ers.Then,for the purpose of realizing the friction control with them, authors developed an on-board system,which sprayed friction modi?er from a bogie to the top of rail accurately.This method is very advantageous to control friction between wheel and rail.As a result of track tests,it was found that one type of friction modi?er,which had proper coef?cient of friction(COF)and positive creep characteristics,was very effective to reduce the lateral force and the squeak noises.?2002Elsevier Science B.V.All rights reserved.
Keywords:Friction control;Adhesion;Two-roller-rig;Lubrication;Friction modi?er;Wheel/rail contact mechanics
1.Introduction
Friction conditions between wheel and rail play important roles in car dynamic behavior because the forces generated by contact of wheel and rail depend on the friction(or creep force)characteristics.For example,high coef?cient of fric-tion(COF)is required for climbing a slope or braking near a station.On the other hand,high COF is not preferable for a car running through a tight curve,because this brings about an increase in lateral force squeak noises,and rail corrugation.
These problems relating to friction between wheel and rail can be solved by optimizing friction condition.
The idea of friction control between wheel and rail has been utilized for many years;spraying sand for a locomotive to climb mountains,using grease lubricant in tight curves to prevent corrugation or wheel-?ange wear and so on.But, even though utilizing these methods,COF can be selected high or low just step-like.Too low COF or too high COF leads to wheel or rail troubles,such as skid at braking, over-run at a station,wheel/rail wear,and corrugation for example.
The authors have formed a project to manage the wheel/rail friction in the service line utilizing a friction
?Corresponding author.Tel.:+81-3-3837-7089;fax:+81-3-3837-7169. E-mail address:m.tomeoka@tokyometro.go.jp(M.Tomeoka).
1Tel.:+81-6-6466-6195;fax:+81-6-6466-6278.
2Tel.:+8l-6-6466-6132;fax:+81-6-6466-6219.modi?er that was developed recently.In this paper,results of the fundamental study on friction control and some track test results will be presented.
2.Friction modi?er
The authors examined water based special friction modi-?ers,which were developed by Kelsan Technologies Corp., Canada,recently[1,2].There are three types of friction prop-erties,low coef?cient of friction(LCF),high positive fric-tion(HPF)and very HPF(VHPF),have been already used in service in North America and Europe.Generally,COF between wheel and rail is saturated from low slip region, independent of contact conditions(dry,wet or lubricated). However,since this special friction modi?er has positive creep characteristics the COF becomes high with an increase in the slip-rate.In this study,HPF was evaluated intensively.
3.Fundamental tests
3.1.Two-roller-rig testing machine
The two-roller-rig testing machine(Fig.1)was developed to evaluate the creep characteristics under various contact conditions between wheel and rail,such as dry,wet and lu-bricated by conventional grease.The creep force character-istics of special friction modi?er were also investigated.
0043-1648/02/$–see front matter?2002Elsevier Science B.V.All rights reserved. PII:S0043-1648(02)00091-1
M.Tomeoka et al./Wear 253(2002)124–129
125
Fig.1.Two-roller-rig text machine.
The testing machine can produce slip accurately between two rollers and measure the creep force generated by the slip.The diameters of both two rollers are 172mm.Pro-?le of wheel-roller is cylindrical and that of rail-roller has 100mm convex single arc.These pro?les of two rollers are designed taking the contact face ellipse and the con-tact pressure to simulate the actual wheel/rail contact into consideration.
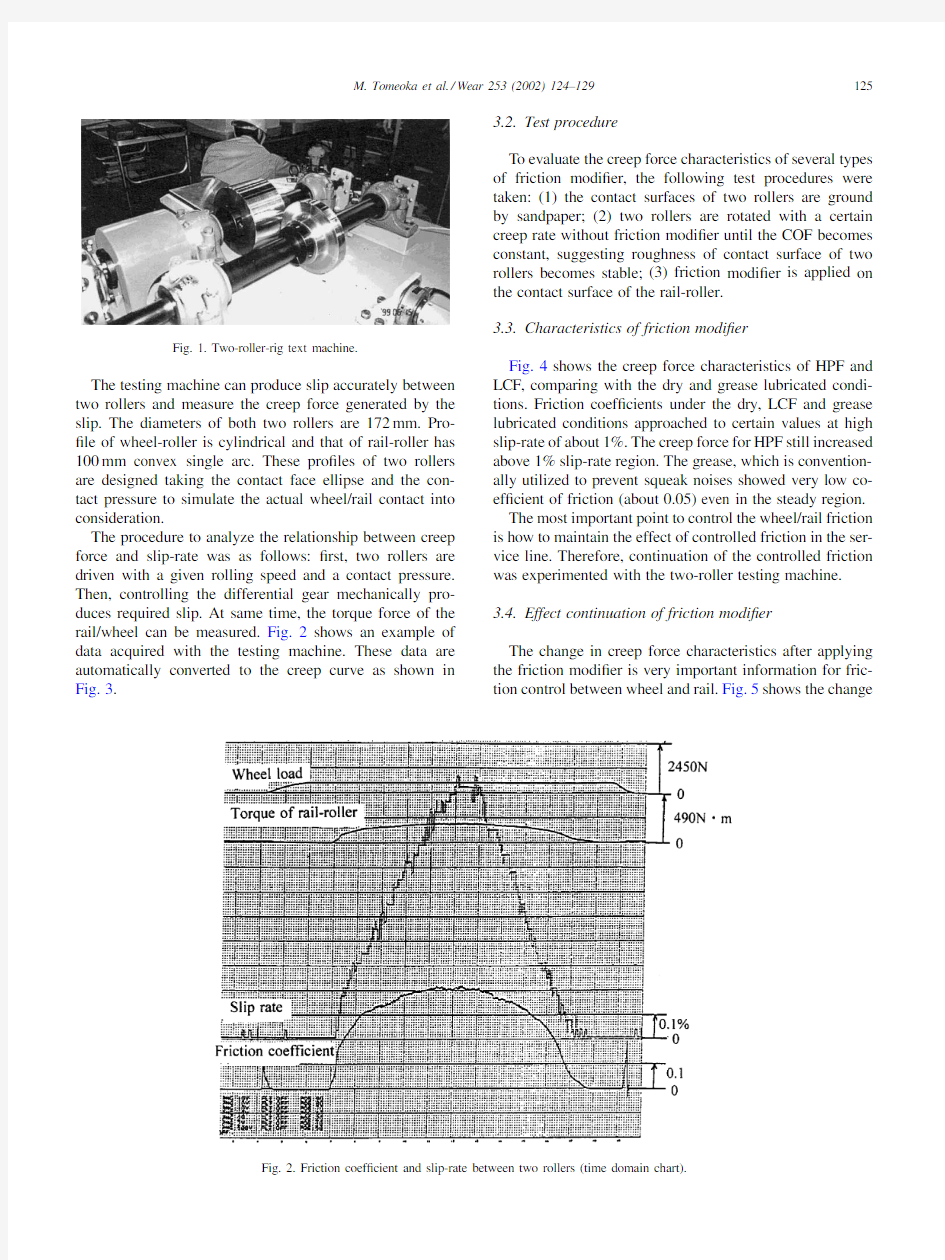
The procedure to analyze the relationship between creep force and slip-rate was as follows:?rst,two rollers are driven with a given rolling speed and a contact pressure.Then,controlling the differential gear mechanically pro-duces required slip.At same time,the torque force of the rail/wheel can be measured.Fig.2shows an example of data acquired with the testing machine.These data are automatically converted to the creep curve as shown in Fig.3
.
Fig.2.Friction coef?cient and slip-rate between two rollers (time domain chart).
3.2.Test procedure
To evaluate the creep force characteristics of several types of friction modi?er,the following test procedures were taken:(1)the contact surfaces of two rollers are ground by sandpaper;(2)two rollers are rotated with a certain creep rate without friction modi?er until the COF becomes constant,suggesting roughness of contact surface of two rollers becomes stable;(3)friction modi?er is applied on the contact surface of the rail-roller.3.3.Characteristics of friction modi?er
Fig.4shows the creep force characteristics of HPF and LCF,comparing with the dry and grease lubricated condi-tions.Friction coef?cients under the dry,LCF and grease lubricated conditions approached to certain values at high slip-rate of about 1%.The creep force for HPF still increased above 1%slip-rate region.The grease,which is convention-ally utilized to prevent squeak noises showed very low co-ef?cient of friction (about 0.05)even in the steady region.The most important point to control the wheel/rail friction is how to maintain the effect of controlled friction in the ser-vice line.Therefore,continuation of the controlled friction was experimented with the two-roller testing machine.3.4.Effect continuation of friction modi?er
The change in creep force characteristics after applying the friction modi?er is very important information for fric-tion control between wheel and rail.Fig.5shows the change
Fig.3.Creep force characteristics(dry condition).
Fig.4.Creep force characteristics.
Fig.5.Effect continuation of HPF friction modi?er.
M.Tomeoka et al./Wear 253(2002)124–129
127
Fig.6.Schematic of distributed friction modi?er in the contact region.
of creep characteristics with the test cycle after applying HPF.The creep rate was increased from 0%to 1%in one cycle.Both rollers rotated about 300revolutions per cycle.Though COF was low just after applying the HPF,positive friction characteristics and proper COF are observed from second to seventh test.Creep characteristics after nine cycles were similar to that in dry condition.3.5.Performance of sprayed friction modi?er
Just after applying the HPF,COF was about 0.1according to the test result shown in Fig.5.This friction level seems to be too low for braking without skidding.To acquire enough adhesion after applying the HPF,we tried to distribute HPF particles on the contact surface.Fig.6shows a schematic drawing for the concept of this method to control friction by distributing particles of the friction modi?er in the contact face.The iron/iron contact region will capture adhesion.To obtain proper COF,the fraction of iron/iron contact region is to be controlled.For the purpose of obtaining particles of the modi?er,the authors chose a method of spraying friction modi?er as mist from a bogie to the top of
rail.
Fig.7.Creep characteristics of distributed HPF in contact
surface.
Fig.8.Particles of friction modi?er in the contact surface.
Two-roller tests,in which HPF was sprayed to the rail-roller,were performed to verify the idea before tests with actual bogie.The tests were repeated until the creep characteristics became stable.Fig.7shows the result of the tests.Fig.8shows the continuously sprayed HPF on the contact region of the rail-roller.According to the result of the test,continuous spraying of the HPF is effective to obtain the stable creep characteristics between wheel and rail.
4.Development of on-board friction control system It is conventional way that grease lubricant,which is ap-plied by track-side lubricator,is applied to the shoulder of high rail to prevent wheel-?ange and rail wear and applied to the top of low rail to reduce the squeak noises and rail corrugation.Since the LCF of grease lubricant leads to skid,
128M.Tomeoka et al./Wear 253(2002)
124–129
Fig.9.Friction management to the railway.
oil lubrication cannot be applied actively in braking sec-tion.Additionally,supplying oil to lubricators,which stud whole of the service line,is burden for maintainer.That is the reason why that the on-board lubrication system is ad-vantageous to manage the friction between wheel and rail by spraying speci?c friction modi?er to the speci?c position of the service line.Fig.9shows a schematic representation of friction management by the system.4.1.On-board friction control system
The most important function of this system is to spray friction modi?er to the top of rail on speci?c track from the bogie.
The nozzles were equipped at the last bogie of trains,so that the next train could pass through the lubricated rail after HPF became stable.
Fig.10shows the spray nozzle for the HPF equipped on the cow-catcher of the actual bogie.Because it has
been
Fig.10.Spray nozzle for HPF friction modi?er.
veri?ed that a wheel of the trailing axle runs almost on the center of rail head in tight curve [3],and the cow-catcher is the best position to mount the nozzle to spray on the top of the rail precisely.Additionally,misty HPF is advantageous for quick drying to get suf?cient adhesion.
Transmitter set on track-side is utilized to send a signals of start or stop position for spraying.This system also has devices which controls volume of spraying proportional to the car velocity.
4.2.The results of the tests with actual car
The HPF was sprayed from the bogie to the top of rail as shown in Fig.11.The HPF was sprayed on either the tangent track or a tight curve with an 80m radius.The sprayed RPF was dried quickly.The HPF showed a positive creep characteristics in the wide range of creep rate as expected.After HPF was sprayed on the top of low rail,both lateral and tangential force were decreased less than half of the
M.Tomeoka et al./Wear253(2002)124–129
129
Fig.11.Spraying HPF.
Table1
Tangential force of wheel with or without HPF
Curve A Curve B
F P F/P F P F/P Without lubrication 1.08 5.900.31 1.35 5.950.23 With lubrication0.66 4.950.130.39 5.250.07
F:tangential force;P:wheel load.
one in the dry condition.Table1shows tangential force in wheels with HPF compared to the one without HPF.The reduction of noise level became more than20dB with HPF [4].5.Conclusions
In this study,creep force characteristics of several types of friction modi?er was evaluated by the two-roller-rig test-ing machine to realize the friction control between wheel and rail in the service line.The test results revealed that friction control over the wide range of COF was possible by selecting proper friction modi?er.Adequate and stable fric-tion was obtained by spraying HPF.The on-board friction control system was developed originally by the authors.The system is advantageous to manage friction between wheel and rail by spraying the speci?c friction modi?er to the speci?c position.The system worked excellent at the track test,showing the expected performance of the sprayed HPF with a decreased wheel/rail force and squeak noises. References
[1]J.Kalousek,K.L.Johnson,An investigation of short pitch wheel
and rail corrugations on the Vancouver mass transit system,in: Proceedings of the Institution of Mechanical Engineers,V ol.206, 1992.
[2]D.T.Eadie,J.Kalousek,K.C.Chiddick,The roll of high positive
friction(HPF)modi?er in the control of short pitch corrugations and related phenomena,in:Proceedings of the Fifth International Conference of Contact Mechanics and Wear of Rail/Wheel Systems (CM2000),2000,p.42.
[3]A.Matumoto,Y.Sato,et al.,Observation of the attitude of bogie
and wheelset in sharply curved track,in:Proceedings of the JSME, J-RAIL’94Symposium,1994,pp.199–202.
[4]M.Tomeoka,M.Koresawa,et al.,Experimental study on the formation
mechanism of wheel?at,in:Proceedings of the Fourth International Conference on Railway Bogie and Running Gears,SSME,1998/1999, pp.333–341.
赛区评阅编号(由赛区组委会填写): 2016年高教社杯全国大学生数学建模竞赛 承诺书 我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下载)。 料 我们的报名参赛队号(12位数字全国统一编号): 参赛学校(完整的学校全称,不含院系名): 参赛队员 (打印并签名) :1. 2.
3. 指导教师或指导教师组负责人 (打印并签名): (指导教师签名意味着对参赛队的行为和论文的真实性负责) 日期:年月日 送全国评阅统一编号(赛区组委会填写): 全国评阅随机编号(全国组委会填写): (请勿改动此页内容和格式。此编号专用页仅供赛区和全国评阅使用,参赛队打印后装订到纸质论文的第二页上。注意电子版论文中不得出现此页。)
系泊系统的设计和探究 摘要 本文利用牛顿力学定律,力矩平衡原理、非线性规划、循环遍历法等方法对系泊系统进行了设计与探究。通过对系泊系统各组件和浮标运用牛顿经典力学体系进行分析,得到了各个情况下的钢桶倾斜角度、锚链状态、浮标吃水深度和游动区域。 ?, 。当风 对于第二问,求解当海面风速为36m/s时,浮标的吃水深度和游动区域、钢桶以及钢管的倾斜角度和锚链形态。利用第一问中的力学方程和程序,求得钢桶的倾角为19.5951?和四节钢管的倾斜角度依次为19.756?、19.755?、19.916?、20.076?。浮标的游动区域为以锚在海面上的投影为圆心,半径为18.8828m的圆。由于部分数据与问题二中钢桶的倾斜角度不超过5?,锚链在锚点与海床的夹角不超过16?的要求不符,所以通过调节重物球的质量使钢桶的倾斜角度和锚链在锚点与海床的夹角处在要求的范围之内。借助MATLAB程序中的循环遍历法,可以求得重物球的质量3770kg。
智能家居系统设计方案 2014 年 12 月
目录 一、智能家居系统的概述 ...................................... 错误 !未定义书签。 二、智能化家居代表未来趋势 ................................... 错误 !未定义书签。 三、设计原则依据 ............................................ 错误 !未定义书签。 四、建设目标 ................................................ 错误 !未定义书签。 五、系统介绍 ................................................ 错误 !未定义书签。 1 、智能灯光系统 . ............................................... 错误 !未定义书签。 2 、空调系统 . ................................................... 错误 !未定义书签。 3 、安防及对讲系统 .............................................. 错误 !未定义书签。 4 、家庭影音系统 . ............................................... 错误 !未定义书签。 5 、电动窗帘、电动遮阳蓬系统.................................... 错误 !未定义书签。 6 、远程网络遥控系统 ............................................ 错误 !未定义书签。 六、灯光控制示例 ............................................ 错误 !未定义书签。 七、结论、案例分享 .......................................... 错误 !未定义书签。
智能家居控制系统技术方案 一、功能需求分析 如果说建筑是凝固的音乐,那么完美的智能家居控制系统则是这首乐曲上绝 妙的音符。在科技发达、物质富庶的今天,自控系统已不单纯是实现室内基本安 防、照明、采暖的工具,而且是建筑装饰的一种实用艺术品,是自动化技术与建 筑艺术的统一体。完善的控制系统集装饰、照明、安防及节能于一身,尽力达到 完美与和谐的统一,充分利用科学与艺术的搭配,光与影的组合以及安防与空调 的自动控制来创造各种舒适、优雅的环境,以加强室内空间效果的气氛。我们在选择一个系统的同时,要切实考虑的主要是:系统的稳定性、系统的安全性、 功能的实用性、后期的维护和扩展、外观的高度艺术和操作的人性化。 1.1智能系统设计范围 设计应包含的系统:智能门锁、安防报警、可视对讲、灯光、空调、电视、电动窗帘、背景音乐、家庭影院、视频监视、集中控制等。并且,以上所有系统 都不是独立的,而是和其他系统相互联系,融合为一个统一的整体,并相互响应,做到真正意义上的智能。 应选用优秀成熟且性能稳定的智能家居控制系统,打造智能豪宅,技术上 将应用先进的全分布控制和集中式控制相结合,利用其强大的功能,保证和满足各个子系统的功能要求的基础上,突出整体、系统的功能,使智能化的各个系统互联为一个有机体,为顶级豪宅创造一个安全、舒适、便捷、高雅、轻松、写意的家居生活空间,具有无比的稳定性和卓越的开放性。 1.2智能系统设计的原则 需考虑用户操作方便,功能实用,外观美观大方的智能家居系统。系统要有吸引来宾的外观和功能,能体现用户高人一等的生活品位。同时要化繁为简、高 度人性、注重健康、娱乐生活、保护私密。
系泊系统的设计 摘要 对于问题一,建立模型一,已知题目给出的锚链长度与其单位长度的质量,得到悬链共210环。对各节锚链,钢桶,四节钢管受力分析得出静力平衡方程,使用分段外推法,可以得到静力平衡下的迭代方程。其中锚对锚链的拉力大小方向为输入变量,迭代的输出变量为浮标的位置和对钢管的拉力,在给定的风速下,输入和输出满足关系2)2(25.1cos 水v h T -=α,αθcos cos 11T T =,通过多层搜索算法得出最符合的输入输出值,即可得到给定风速下浮标的吃水深度,浮标拉力、锚链与海床夹角。利用MATLAB 软件编程求解模型得到:风力12m/s 时,钢桶与竖直方向上的角度1.9863度,从下往上四节钢管与竖直方向夹角为1.9652度、1.9592度、1.9532度、1.9472度,浮标吃水0.7173m ,以锚为圆心浮标的游动区域16.5125m ,锚链末端切线与海床的夹角3.8268度。风力24m/s 时,锚链形状,钢桶与竖直方向上的夹角3.9835度,从下往上四节钢管与竖直方向夹角为3.9420度、3.9301度、3.9183度、3.9066度,浮标吃水0.7244m ,以锚为圆心浮标的游动区域18.3175m 。锚链末端切线与海床夹角15.9175度。 对于问题二的第一小问,使用模型一求解,当风速36m/s 时,锚链末端切线与海床夹角26.3339度,浮标吃水0.7482m ,浮标游动区域为以锚为圆心半径为18.9578m 的圆形区域,从下往上四节钢管与竖直方向倾斜角度为8.4463度、8.4225度、8.3989度、8.3753度,钢桶与竖直方向倾斜角度为8.5294度。为满足问题二的要求,在模型一的基础上把重物球质量作为变量,建立模型二,将钢桶倾斜角小于5度和锚链前端夹角小于16度当做两个约束条件,通过MATLAB 编程求解得到满足约束条件要求的重物球质量取值范围为3700kg 到5320kg 。 对于问题三,首先取不同水深、水速、风速三种情况,建立模型三,即在模型一的基础上增加水流对系统产生的影响。在三种情况下,找到合适的锚链型号、锚链长度,重物球质量,对吃水深度、游动区域、钢桶的倾斜角三个目标进行优化达到最小。通过MATLAB 编程实现该模型三得到结果:选用Ⅲ型锚链,锚链长度为27.24m ,重物球质量为2580kg 。 关键词:平面静力系分析 多层搜索算法 遗传算法 逐步外推法 多目标优化
智能家居系统设计方案 2014年12月
目录 一、智能家居系统的概述 ...................................... 错误!未定义书签。 二、智能化家居代表未来趋势................................... 错误!未定义书签。 三、设计原则依据 ............................................ 错误!未定义书签。 四、建设目标 ................................................ 错误!未定义书签。 五、系统介绍 ................................................ 错误!未定义书签。 1、智能灯光系统................................................ 错误!未定义书签。 2、空调系统.................................................... 错误!未定义书签。 3、安防及对讲系统.............................................. 错误!未定义书签。 4、家庭影音系统................................................ 错误!未定义书签。 5、电动窗帘、电动遮阳蓬系统.................................... 错误!未定义书签。 6、远程网络遥控系统............................................ 错误!未定义书签。 六、灯光控制示例 ............................................ 错误!未定义书签。 七、结论、案例分享 .......................................... 错误!未定义书签。
物联网智能家居应用方案 1、智能家居背景简介 智能家居概念的起源很早, 但一直未有具体的建筑案例出现, 直到1984年美国联合科技公司( United Techno1ogies Building System) 将建筑设备信息化、整合化概念应用于美国康乃迪克 州( Conneticut)哈特佛市( Hartford) 的CityPlaceBuilding时, 才 从此也揭开了全世界争相建造智能出现了首栋的”智能型建筑”, 家居的序幕。 经过多年的需求累积, 当前一般把智能家居定义为利用计算机、网络和综合布线技术, 经过家庭信息管理平台将与家居生 活有关的各种子系统有机地组合成一个系统。具体来说, 就是首先在一个家居中建立一个通讯网络, 为家庭信息提供必要的 通路, 在家庭网络操作系统的控制下, 经过相应的硬件和执行 机构, 实现对所有家庭网络上的家电和设备的控制和监测。其 次, 它们都要经过一定的网络平台, 构成与外界的通讯通道, 以实现与家庭以外的世界沟通信息, 满足远程控制、监测和交换信息的需求。最终达到满足人们对安全、舒适、方便和绿色环保的需求。 随着社会经济结构、家庭人口结构以及信息技术的的发展变化以及人类对家居环境的安全性、舒适性、效率性要求的提高, 造成家居智能化的需求大大增加, 同时越来越多的家庭
要求智能家居产品不但要满足一些基本的需求, 更要求智能家居系统在功能扩展、外延甚至服务方面能够做到简单、方便、安全。 2、常见智能家居技术介绍及比较 虽然智能家居的概念很早就出现, 市场需求也一直存在, 但长期以来智能家居的发展由于受制于相关技术的突破, 一直没有得到大规模的应用普及。当前市场存在的智能家居技术介绍 如下: 1.有线方式 这种方式所有的控制信号必须经过有线方式连接, 控制器端的信号线更是多得吓人, 一但遇到问题排查也相当困难。有线 方式缺点非常突出, 布线繁杂、工作量大、成本高、维护困难、不易组网。这些缺点最终导致有线方式的智能家居只停 留在概念和试点阶段, 无法大规模推广。 2.无线方式 用于智能家居的无线系统需要满足几个特性: 低功耗、稳定、易于扩展并网; 至于传输速度显然不是此类应用的重点。 当前几种可用于智能家居的无线方式 蓝牙: 是一种支持设备短距离通信( 一般10m内) 的无线电技术。能在包括移动电话、PDA、无线耳机、笔记本电脑、相关外设等众多设备之间进行无线信息交换。但这种技
比较全的一套智能家居设计方案 智能系统设计范围: 本设计包含的系统为:智能门锁、安防、可视对讲、厨房室内可视分机、灯光、空调、电动窗帘(百叶窗、气窗)、背景音乐、环境监测(红外亮度、然气感应)、视频监视、集中控制和远程WEB控制等。并且,以上所有系统都不是独立的,而是和其他系统相互联系,融合为一个统一的整体,并相互响应,做到真正意义上的智能。 智能系统设计的原则: 用户需要操作方便,功能实用,外观美观大方的智能家居系统。系统要有吸引来宾的外观和功能,能体现用户高人一等的生活品位。同时要化繁为简、高度人性、注重健康、娱乐生活、保护私密。 系统功能描述: 以下,我们跟据房型结构,设计的智能家居系统: 区域: 庭院 主楼负一层:影音娱乐室、储藏间、楼梯 主楼一层:大门、门厅、客厅、餐厅、厨房、客卧室、卫生间、楼梯 主楼二层: 二层休闲厅、主卧室及主卫、次卫、儿童房、书房及阳台. 负一层: 1、影视娱乐室 ①控制对象:灯光开关、灯光调光、电动窗帘、电视、AV播放设备、中央空调。 ②在入口安装1只“智能控制面板”,对以上设备进行智能化控制,设置6组常用场景模式:“准备”、“电影”、“中间休息”、“纯音乐”、“调光”、“离场”。 按下“准备”模式,灯光自动调亮,空调自动启动,人员入场,做准备工作。 按下“电影”模式,灯光逐渐暗下(过度时间2秒),只留有最后面的两个壁灯在5%的亮度,电动窗帘自动闭合,电视机自动打开。 按下“中间休息”模式,灯光渐亮,方便休息,喝点咖啡。 按下“纯音乐”模式,单独的音乐欣赏,灯光调节到一个温和的亮度。 按下“调光”模式,可对以上四个场景的灯光亮度做手动调节,以适合不同人的要求。
系泊系统的设计和探究 This model paper was revised by the Standardization Office on December 10, 2020
赛区评阅编号(由赛区组委会填写): 2016年高教社杯全国大学生数学建模竞赛 承诺书 我们仔细阅读了《全国大学生数学建模竞赛章程》和《全国大学生数学建模竞赛参赛规则》(以下简称为“竞赛章程和参赛规则”,可从全国大学生数学建模竞赛网站下载)。 我们完全明白,在竞赛开始后参赛队员不能以任何方式(包括电话、电子邮件、网上咨询等)与队外的任何人(包括指导教师)研究、讨论与赛题有关的问题。 我们知道,抄袭别人的成果是违反竞赛章程和参赛规则的,如果引用别人的成果或资料(包括网上资料),必须按照规定的参考文献的表述方式列出,并在正文引用处予以标注。在网上交流和下载他人的论文是严重违规违纪行为。 我们以中国大学生名誉和诚信郑重承诺,严格遵守竞赛章程和参赛规则,以保证竞赛的公正、公平性。如有违反竞赛章程和参赛规则的行为,我们将受到严肃处理。 我们授权全国大学生数学建模竞赛组委会,可将我们的论文以任何形式进行公开展示(包括进行网上公示,在书籍、期刊和其他媒体进行正式或非正式发表等)。 我们参赛选择的题号(从A/B/C/D中选择一项填写): 我们的报名参赛队号(12位数字全国统一编号): 参赛学校(完整的学校全称,不含院系名): 参赛队员 (打印并签名) :1.
2. 3. 指导教师或指导教师组负责人 (打印并签名): (指导教师签名意味着对参赛队的行为和论文的真实性负责) 日期:年月日 (请勿改动此页内容和格式。此承诺书打印签名后作为纸质论文的封面,注意电子版论文中不得出现此页。以上内容请仔细核对,如填写错误,论文可能被取消评奖资格。) 赛区评阅编号(由赛区组委会填写): 2016年高教社杯全国大学生数学建模竞赛 编号专用页 赛区评阅记录(可供赛区评阅时使用): 送全国评阅统一编号(赛区组委会填写): 全国评阅随机编号(全国组委会填写):
xx家电控制系统设计说明 一、定义 智能家居又称智能住宅,在国外常用Smart Home表示。与智能家居含义近似的有家庭自动化(HomeAutomation)、电子家庭(ElecctronicHome、E-home)、数字家园(DigitalFamily)、家庭网络(Home Net/Networks for ome)、网络家居(Network Home)、智能家庭/建筑 (IntelligentHome/Building),在我国香港和台湾等地区,还有数码家庭、数码家居等称法。 智能家居是以住宅为平台,利用综合布线技术、网络通信技术、安全防范技术、自动控制技术、音视频技术将家居生活有关的设施集成,构建高效的住宅设施与家庭日程事务的管理系统,提升家居安全性、便利性、舒适性、艺术性,并实现环保节能的居住环境。 智能家居是一个居住环境,是以住宅为平台安装有智能家居系统的居住环境,实施智能家居系统的过程就称为智能家居集成。 智能家居集成是利用综合布线技术、网络通信技术、安全防范技术、自动控制技术、音视频技术将家居生活有关的设施集成。由于智能家居采用的技术标准与协议的不同,大多数智能家居系统都采用综合布线方式,但少数系统可能并不采用综合布线技术,如电力载波,不论哪一种情况,都一定有对应的网络通信技术来完成所需的信号传输任务,因此网络通信技术是智能家居集成中关键的技术之一。安全防范技术是智能家居系统中必不可少的技术,在小区及户内可视对讲、家庭监控、家庭防盗报警、与家庭有关的小区一卡通等领域都有广泛应用。自动控制技术是智能家居系统中必不可少的技术,广泛应用在智能家居控制中心、家居设备自动控制模块中,对于家庭能源的科学管理、家庭设备的日程管理都有十分重要的作用。音视频技术是实现家庭环境舒适性、艺术性的重要技术,体现在音视频集中分配、背景音乐、家庭影院等方面。 二、表述 智能家居其实有两种表述的语意,定义中描述的,以及我们通常所指的都是智能家居这一住宅环境,既包括单个住宅中的智能家居,也包括在房地产小
全方位智能家居系统解决方案 Smart Home 三木
目录第一章、引言 第二章、方案设计原则 第三章、设计依据 第四章、设计需求 第五章、产品功能概述 第六章、主要产品详述
引言 智能家居为的是什么?其实就是为人们提供一个安全、舒适、高效和方便的生活环境。对于智能家居的产品来说智能就是实用性…… 时下,在智能家居成为流行趋势进入普通家庭旺季,许多居民开始忙碌起来。如果家装修不安装智能家居,那就真的落伍了,弄不好会被亲朋好友戏称为“老土”。怎么样才能尽量花少许的预算,科学合理地安装颇具高新技术含量的智能家居,倒是让不少家庭破费一番脑筋。为此,启冠智能凭借多年智能制造和研发的优势,对原有智能家居系统进行全新升级,推出全方位智能家居系统解决方案 SG-home。 全方位智能家居系统解决方案是采 用具有自主知识产权的家庭控制总线技术 开发的。系统采用多种通信手段实现住宅 区域联网,采用模块化结构,根据用户的 不同需要进行组合,从而建立一个由家庭 智能控制系统、网络服务系统和家庭自动 化系统组成的家庭综合服务与管理集成系 统,从而实现全面的智能交互、便利的通 讯网络以及舒适的居住环境的家庭住宅。 系统可以提供的主要功能包括:家居智能 控制(灯光照明控制、空调通风,电器控制)、信息服务、图像存储、系统状态监测。既是一种智能控制网络技术,又指一类采用该技术设计的、能够互相兼容和直接互连的智能化家居产品。这类产品在技术上保证了产品的模块化、系列化和可升级性。 全方位智能家居系统广泛用于家居电器的控制,其主要功能为灯光控制、场景设定、空调控制、电动窗帘、背景音乐、门禁系统、家电控制以及远程视频 监控。系统主要由智能面板 开关和执行模块两部分组 成,智能面板开关一般安装 在卧室、餐厅、客厅、书房、 视听室、厨房及卫生间中, 您可以使用智能面板控制灯 光开关、调光、电动窗帘、 空调等,执行模块则内置集 成在智能开关中,负责执行 面板开关发出的命令,对灯 光、窗帘等进行控制。 1、方案概述
智能家居系统设计方案 一、智能家居概述 智能家居是以住宅为平台,利用综合布线技术、网络通信技术、安全防范技术、自动控制技术、音视频技术等,将家居生活有关的家用电器设备和住宅设施监控集成,构建高效的家用电器日程事务管理系统,提升了家居安全性、便利性、舒适性、艺术性,并可实现节能环保的居住环境。通常我们把实施智能家居系统的过程称为智能家居集成。 二、智能家居系统范围 智能家居系统的主要子系统有:家居布线系统、家庭网络系统、智能家居集成控制管理系统、家居照明控制系统、住宅安防系统,这些是智能家居配置的必备系统,还有家庭影音系统、家庭环境控制系统,家庭门窗窗帘自动控制系统、家庭宠物喂养控制系统、家庭智能单品电器等是智能家居系统配置的可选系统。三、智能家居系统功能介绍 本方案针对别墅三层智能家居系统规划有可视对讲门禁系统、远程访问控制系统、定时控制系统、远程监控及安防报警系统、
灯光控制系统、家电控制系统等六大子系统。以下针对各系统作系统功能组成说明: 1.可视对讲门禁系统 访客来访,您在家时的情境 (1)访客可直接透过别墅门口机呼叫室内机做可视对讲,确认访客身份开门。 (2)当呼叫时,您不在室内主机旁,您不用再急急忙忙地跑到对讲管理主机接听,只要拿起家用的电信分机即可与来访客人对讲/开门。 (3)您也可以使用室内对讲分机,做访客呼叫对讲/开门。 (4)您也可以拿起专用的遥控器控制开门。 访客来访,您不在家时的情境 (1)当您外出时,可于智能控制管理主机设定外出转接,当客人来访时,系统会作呼叫转移,您可以用手机与来访客作对讲。 (2)若是您的家人忘了带锁匙时,可直接于手机上透过3G网络做远程控制开门。或者使用短消息发送关键词密码方式,经系统辨识确认后,也可以开门。 (3)当您外出时,可于智能控制管理主机设定外出转接,当客人来访时,系统会作呼叫转移,您可以直接用手机与门口访客做对讲。 主人回到家时的情境
智能家居酒店解决方案 篇一:至爱物联智能家居酒店解决方案 一、为酒店服务业创造巨大价值! 1提高酒店用户满意度 订房、入住、续房、退房,全部通过手机完成;客户温度、湿度及空气质量自动智能调节,时刻保持清新客房。2降低运营成本 自助服务、预约服务,前台人员节约50%,客房服务人员节约25%,降低能耗,大幅降低酒店运营成本。 3创造新的利润增长点 个性化客房,提高客房单价;APP订房、入住、续房,提升时租房周转率;体验式购物,新的利润增长点。 4用户大数据 拥有用户的大数据信息,根据数据判断市场需求,促进酒店健康绿色升级。 5自媒体社交 在酒店平台内客户相互沟通,打发出差无聊的时光,同时可以提供咖啡、小吃、茶点增值服务。 二、为用户创造极致尊贵体验! 1自助订房 从手机APP上直接下单预定房间号,入住不经过前台,直接进入房间
2个性化入住体验 客户订房可通过手机APP很直观的感受房间内空气质量指数, 可根据室内空气质量,提前预设房间的空调、热水器、窗户、窗帘、打开,在入住前达到自己想要的温度和环境舒适度。 3手机开锁 不经过前台办理登记,付款后即可获取开锁权限,保障客户的隐私安全。 4健康睡眠 睡眠监测系统,监测到客人入睡,自动关闭电视、窗户、窗帘,并将灯光、温度调整到睡眠模式。同时客户可以从自己一晚上心率、呼吸率、翻身、起夜得知自己的身体健康状况,提醒您保持健康。 5自然唤醒 客户如需叫醒服务,可自主设置定时自然唤醒,窗帘慢慢打开,清晨的光线照进来,背景音乐缓缓响起,空调将温度调节到舒适的状态,塑造一个舒适的起床环境。 中斗科技至爱物联引领智能酒店新风潮! 篇二:酒店客房智能家居装修方案-单人间 云海物联智能家居酒店单人间产品装修方 案 云海物联智能家居解决方案
智能家居设计方案 说明
楼宇智能家居设计方案说明 智能家居又称智能住宅,它是融合了自动化控制系统、计算机网络系统和网络通讯技术于一体的网络化智能化的家居控制系统。衡量一个住宅小区智能化系统的成功与否,并非仅仅取决于智能化系统的多少、系统的先进性或集成度,而是取决于系统的设计和配置是否经济合理而且系统能否成功运行,系统的使用、管理和维护是否方便,系统或产品的技术是否成熟适用,换句话说,就是如何以最少的投入、最简便的实现途径来换取最大的功效,实现便捷高质量的生活。 为了实现上述目标,智能家居系统设计遵循以下原则:一、方法、步骤实用性便利性;
智能家居最基本的目标是为人们提供一个舒适、安全、方便和高效的生活环境。对智能家居产品来说,最重要的是以实用为核心,摒弃掉那些华而不实,只能充作摆设的功能,产品以实用性、易用性和人性化为主。 在设计智能家居系统时,根据用户对智能家居功能的需求,整合以下最实用最基本的家居控制功能:包括智能家电控制、智能灯光控制、电动窗帘控制、防盗报警、门禁对讲、煤气泄露等,同时还能够拓展诸如三表抄送、视频点播等服务增值功能。对很多个性化智能家居的控制方式也是丰富多样,比如:本地控制、遥控控制、集中控制、手机远程控制、感应控制、网络控制、定时控制等等,其本意是让人们摆脱繁琐的事务,提高效率,不至于使操作过程和程序设置过于繁琐,让用户产生排斥心理。因此在智能家居设计时要充分考虑到用户体验,注重操作的便利化和直观性,采用图形图像化的控制界面,让操作所见即所得。考虑到整个建筑的各个智能化子系统二十四小时运转,以及系统的安全性、可靠性和容错能力予以高度重视。对各个子系统,以电源、系统备份等方面采取相应的容错措施,保证系统正常安全使用、质量、性能良好,具备应付各种复杂环境变化的能力。 智能家居设计系统方案依照国家和地区的有关标准进行,确保系统的扩充性和扩展性,在系统传输上采用标准的TCP/IP协议网络技术,保证不同产商之间系统能够兼容与互联。系统的前端
智 能 家 居 方 案 老师:施泽全老师 姓名:陆文龙 班级:物联网131班 时间:2014年12月20日
前言 随着人们生活水平的提高和科技的发展,家庭智能化已成为一种必然趋势而深入千家万户。家庭智能化即智能化家居(Smart Home),亦称数字家园(Digital Family)、家庭自动化(Home Automation)、电子家庭(E-home)、智能化住宅(Intelligent Home)、网络家居(Network Home)、智能屋(Wise House,WH)、智能建筑(Intelligent Building)等。它是利用计算机、通信、网络、电力自动化、信息、结构化布线、无线等技术将所有不同的设备应用和综合功能互连于一体的系统。它以住宅为平台,兼备建筑、网络家电、通信、家电设备自动化、远程医疗、家庭办公、娱乐等功能,集系统、结构、服务、管理为一体的安全、便利、舒适、节能、娱乐、高效、环保的居住环境。其从控制层次来分,一般由中央控制中心、家居智能控制终端、小区智能控制系统、家庭网关和外部网络几部分组成。 1、智能家居系统体系结构 家居系统主要由智能灯光控制、智能家电控制、智能安防报警、智能娱乐系统、可视对讲系统、远程监控系统、远程医疗监护系统等组成,框图如图1所示。
图1 智能家居系统结构框图 2、系统主要模块设计 2.1 照明及设备控制 智能家居控制系统的总体目标是通过采用计算机、网络、自动控制和集成技术建立一个由家庭到小区乃至整个城市的综合信息服务和管理系统。系统中照明及设备控制可以通过智能总线开关来控制。本系统主要采用交互式通信控制方式,分为主从机两大模块,当主机触发后,通过CPU将信号发送,进行编码后通过总线传输到从模块,进行解码后通过CPU触发响应模块。因为主机模块与从机模块完全相同,所以从机模块也可以进行相反操作控制主机模块实现交互式通信。系统主框图如图2所示,系统主从模块的程序流程图如图3所示。其中主机相当于网络的服务器,主要负责整个系统的协调工作。
物联网传感器-家庭安保系统解决方案-智能家居编辑:唐勤强物联传感 房屋的安全保障永远是不可忽视的问题,所以 WULIANCG 有多种保障您家安全的解决方案,简单安装,不给您带来任何不便。不同于传统的安防系统,WULIANCG 确保在您回家的路上或是外出度假时家中的灯能点亮;如果车库门忘了锁,监视感应器、IP 摄像头能立马给您短信通知;甚至还能让您了解孩子离家的行踪,以确保他们在某些时间段里呆在应该在的地方。下面让我们看看 WULIANCG 保障家中安全的部分办法。 WULIANCG——回家时永不黑暗 当车库门或前门打开时,家中主要的灯或走廊灯会自动亮起。当您从一个房间走到另一个房间时,感应器会根据您的进入或离开自动控制不同房间灯光的开与关……尤其是您抱着睡着的孩子或是拿着一堆东西腾不开手时。 产品推荐: · WULIANCG 控制主机 · 门感应器 · 无线开关和调光器 · 感应器
WULIANCG——无时无刻照看您的家 您是否有过这样的经历,上班的时候突然想起车库的门似乎忘了锁?有了 WULIANCG,就再也不用担心,如果车库的门没有锁好,系统会自动发邮件给您。您只需上网登录家庭系统,就能远程遥控把门锁上,保护家里安全。 产品推荐: · WULIANCG 控制主机 · 4Sight 远程控制软件 · 门触发器 当您外出度假或有个一年只去住几个月放松身心的别墅时,最不愿操心、的事就是担心家中是否安全。WULIANCG 能时刻帮您控制家中气温,防止结冰,还能在漏水时自动提醒您,安防系统能让您通过 IP 摄像头和网络随时查看家中状况。您甚至还能远程操控家中的灯,让您不在家时家中的灯也能跟您在家时一样亮起。 产品推荐: · WULIANCG 控制主机
智能生活智慧人生智能家居控制系统解决方案 广东领航者科技有限公司
一、概述 本方案设计采用witlife智能家居控制系统。 维德莱夫品牌源自澳大利亚,始创于1989年, Witlife维德莱夫—智能生活·智慧人生,系智能化酒店,智能化家居的领航者,在大洋洲和大中华地区设有研发和业务机构。在全球40多个国家和地区设有经销商和代表处。为智能化生活的进一步发展奠定了厚实的基础,为智能化领航起到了决定性作用。公司自创立以来始终不变的核心理念:为智能生活,提供人性化、专业化的全程智能服务,实现超乎客户满意的惊喜。 Witlife维德莱夫大中华地区总部成立于2010年,Wit life维德莱夫是一家专业从事家庭智能化控制产品与解决方案的研发、生产、销售和服务的全球知名企业,是全球知名的智能家居公司。 Witlife维德莱夫智能家居系统,是采用自动化控制系统、计算机网络系统、网络通讯技术、无线射频(RF)技术于一体的智能控制系统。具有实时显示、即时控制、预设控制、远程控制等功能,可以用家用电脑、手机、平板电脑、RF遥控器、触控面板等多种方式进行控制。通过网络可以完全掌控家庭、酒店所有的灯光、空调、电视、音响、热水器、饮水机、电饭煲、房门、窗帘、供养、浇花等。 Witlife维德莱夫,智能生活,智慧人生,一切尽在掌握之中。 推出的世界上最先进的网络家居控制系统,广泛应用于现代住宅中的安防监控、灯光窗帘、温度湿度、音乐影院等智能控制,并能无
缝接入小区网络对讲、家庭物联网。 二、网络家居控制系统的设计标准 本设计方案主要参照以下设计标准: 1、JGJ/T16-92 (民用建筑电气设计规范) 2、EN50090 (欧洲电工标准) 三、智能家居系统结构原理 智能家居控制系统采用目前最先进的网络架构,分散控制各个子系统,最适合现代家居的应用,其结构如下: 智能家居控制系统结构 智能家居控制系统的基本构成是网络点,网络点通过网络线接入路由器构成的家庭局域网。可以高速双向传输控制、信息、视频、音频等。 由上图可看出,智能家居控制系统平台能够搭载各种控制子系统,除了继电器控制信号,它能控制任何控制协议,传输任何音频、视频、信息数据,并能双向反馈。 智能家居控制系统具有: ?居家安防控制 ?居家监控系统 ?灯光智能控制
智能家居解决方案 编辑:薛慧南京物联传感技术 一、智能家居带您进入梦幻生活 当您下班回家时,随着门锁打开,家中的安防系统自动解除警戒,廊灯缓缓点亮,空调、通风系统自动启动,动听的背景交响乐轻轻奏起; 当您坐在家中沙发上,手拿一个外观精美的遥控器,就能控制家中所有的电器。晚上,您上床休息,在他躺下的一刻,所有的窗帘都自动关闭,入睡前,床头边的面板上,“晚安”的灯光按钮亮起,所有需要关闭的灯光和电器设备自动关闭,同时安防系统自动开启处于警戒状态; 当您外出的时候,只要按一个键就可以关闭家中所有的灯和电器; …… (智能家居带来的理想生活,着实令人神往) 在科技高速发展的今天,这已经不仅仅是在科幻电影中看到的情景了。随着智能家居逐渐走进大众生活,这样的场景将在您的身边变成现实。其实,现代科技进入家居的带来的变化令人啧啧称奇,给人们的家居生活带来了极大的便利。刚刚描绘的场景,都是是智能家居将要带给您的“神奇”体验,不过是智能家居控制系统能为您做的事情中的一小部分。 二、智能家居性概念和内涵 通常认为,智能家居就是以住宅为平台,兼备建筑、网络通信、信息家电、设备自动化,集系统、结构、服务、管理为一体的高效、舒适、安全、便利、环保的居住环境。智能家居系统可以为您提供家电控制、照明控制、窗帘控制、电话远程控制、室内外遥控、防盗报警、以及可编程定时控制等多种功能和手段,使您的生活更加舒适、便利和安全。 与普通家居相比,智能家居不仅具有传统的居住功能,提供舒适安全、高品位且宜人的
家庭生活空间,还由原来的被动静止结构转变为具有能动智慧的工具,提供全方位的信息交换功能,帮助家庭与外部保持信息交流畅通,优化人们的生活方式,帮助人们有效安排时间,增强家居生活的安全性,甚至为各种能源费用节约资金。 当前,国家电网公司正在积极推进智能小区建设,很多类似于上文的智能家居方案也正在逐步实践中,相信不久的将来,更多的市民能够享受到这种智能家居带来的方便、舒适、安全和乐趣。 (图为:手机操控智能家居的流程) 实现智能化的家居,可以给您的生活带来以下便利: 节省费用:不需要时,家中能源消耗设备可以自动关闭,这样可以降低您的生活费用。 使用方便:智能化系统提供远程遥控接口,在您外出时,还可以通过手机或上网来调整和控制家电设备。 安全性高:套家庭智能化系统在紧急情况时可以防御坏人侵入并及时报警,有效保证您的家居安全。 改变生活方式:你可以在家办公,在家炒股、炒汇、做期货以及进行远程会议、在家购物、在家培训等。 三、远拓智能家居应用实例 新一代智能家居整体解决方案致力于打造舒适、便捷的现代家居生活体验,是南京远拓科技有限公司近年来自主创新之路的杰出成果。 该款智能家居整体解决方案将智能灯光窗帘控制系统、电器控制系统、远程控制系统、影音娱乐系统、可视对讲系统、背景音乐系统、3G智能安防系统、社区信息管理系统等多
摘要 本题要求观测近海观测网的组成,建立模型对其中系泊系统进行设计,在不同风速和水流的情况下确定锚链,重物球,钢管及浮标等的状态,从而使通讯设备的工作效果最佳。求解的具体流程如下: 针对问题一,分别对系统中的受力物体在水平方向和竖直方向上的力进行分析,找出锚链对锚无拉力时的临界风速,运用力矩平衡求出钢管与钢桶的倾斜角度。对于锚链,将其等效为悬链线模型,根据风速不同判断锚链的状态,从而求出结果。 ?时能够正常工针对问题二,需要调节重物球的质量,使通讯设备在36m m 作。为了确定重物球的质量,首先将实际风速与临界风速进行比较,判断此时系统中各物体的状态,与题目中已知数据进行比较。在钢桶倾斜角度达到临界角度时,计算锚链与海床的夹角并于题中数据进行比较,计算重物球的质量。在浮标完全没入海面时,计算相应条件下重物球的质量,从而确定满足条件的重物球的质量范围。 针对问题三,要求在不同条件下,求出系泊系统中各物体的状态。以型号I 锚链为例,当水流方向与风速方向相同时,系统条件最差,分析在不同水深条件下的系泊系统设计。由题中已知条件确定系统设计的限制条件,对系统各物体进行受力分析,以使整体结果最小,即可得出最优的系泊系统设计。 # 》 关键词:悬链线多目标非线性规划 @
一、问题重述 近浅海观测网的传输节点由浮标系统、系泊系统和水声通讯系统组成(如图1所示)。某型传输节点的浮标系统可简化为底面直径2m、高2m的圆柱体,浮标的质量为1000kg。系泊系统由钢管、钢桶、重物球、电焊锚链和特制的抗拖移锚组成。锚的质量为600kg,锚链选用无档普通链环,近浅海观测网的常用型号及其参数在附表中列出。钢管共4节,每节长度1m,直径为50mm,每节钢管的质量为10kg。要求锚链末端与锚的链接处的切线方向与海床的夹角不超过16度,否则锚会被拖行,致使节点移位丢失。水声通讯系统安装在一个长1m、外径30cm 的密封圆柱形钢桶内,设备和钢桶总质量为100kg。钢桶上接第4节钢管,下接电焊锚链。钢桶竖直时,水声通讯设备的工作效果最佳。若钢桶倾斜,则影响设备的工作效果。钢桶的倾斜角度(钢桶与竖直线的夹角)超过5度时,设备的工作效果较差。为了控制钢桶的倾斜角度,钢桶与电焊锚链链接处可悬挂重物球。 系泊系统的设计问题就是确定锚链的型号、长度和重物球的质量,使得浮标的吃水深度和游动区域及钢桶的倾斜角度尽可能小。 问题1某型传输节点选用II型电焊锚链,选用的重物球的质量为1200kg。现将该型传输节点布放在水深18m、海床平坦、海水密度为×103kg/m3的海域。若海水静止,分别计算海面风速为12m/s和24m/s时钢桶和各节钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。 | 问题2在问题1的假设下,计算海面风速为36m/s时钢桶和各节钢管的倾斜角度、锚链形状和浮标的游动区域。请调节重物球的质量,使得钢桶的倾斜角度不超过5度,锚链在锚点与海床的夹角不超过16度。 问题3 由于潮汐等因素的影响,布放海域的实测水深介于16m~20m之间。布放点的海水速度最大可达到s、风速最大可达到36m/s。请给出考虑风力、水流力和水深情况下的系泊系统设计,分析不同情况下钢桶、钢管的倾斜角度、锚链形状、浮标的吃水深度和游动区域。 二、模型假设 1.不考虑流体对锚链的作用,忽略锚链本身的伸长,锚链沿长度均匀分布; 2.假设风是二维的,只存在平行于水平面的风速,不存在垂直方向上的分量;
智能家居控制系统 技术方案
智能家居控制系统技术方案 一、功能需求分析 如果说建筑是凝固的音乐,那么完美的智能家居控制系统则是这首乐曲上绝妙的音符。在科技发达、物质富庶的今天,自控系统已不单纯是实现室内基本安防、照明、采暖的工具,而且是建筑装饰的一种实用艺术品,是自动化技术与建筑艺术的统一体。完善的控制系统集装饰、照明、安防及节能于一身,尽力达到完美与和谐的统一,充分利用科学与艺术的搭配,光与影的组合以及安防与空调的自动控制来创造各种舒适、优雅的环境,以加强室内空间效果的气氛。我们在选择一个系统的同时,要切实考虑的主要是:系统的稳定性、系统的安全性、功能的实用性、后期的维护和扩展、外观的高度艺术和操作的人性化。 1.1智能系统设计范围 设计应包含的系统:智能门锁、安防报警、可视对讲、灯光、空调、电视、电动窗帘、背景音乐、家庭影院、视频监视、集中控制等。而且,以上所有系统都不是独立的,而是和其它系统相互联系,融合为一个统一的整体,并相互响应,做到真正意义上的智能。 应选用优秀成熟且性能稳定的智能家居控制系统,打造智能豪宅,技术上将应用先进的全分布控制和集中式控制相结合,利
用其强大的功能,保证和满足各个子系统的功能要求的基础上,突出整体、系统的功能,使智能化的各个系统互联为一个有机体,为顶级豪宅创造一个安全、舒适、便捷、高雅、轻松、写意的家居生活空间,具有无比的稳定性和卓越的开放性。 1.2智能系统设计的原则 需考虑用户操作方便,功能实用,外观美观大方的智能家居系统。系统要有吸引来宾的外观和功能,能体现用户高人一等的生活品位。同时要化繁为简、高度人性、注重健康、娱乐生活、保护私密。 二、设计方案 2.1 系统功能描述 下面对重点区域进行详细功能说明: 2.1.1、庭院 功能描述: ①室外模拟高清高速球把庭院的视像传送到网络服务器,以方便 主人能够经过电视、触摸屏、Internet、手机随时随地观察庭院周围的影像,并记录保存20天;
家庭安保系统解决方案-无线智能家居
物联网传感器-家庭安保系统解决方案-智能家居 编辑:唐勤强物联传感 房屋的安全保障永远是不可忽视的问题,所以WULIANCG 有多种保障您家安全的解决方案,简单安装,不给您带来任何不便。不同于传统的安防系统,WULIANCG 确保在您回家的路上或是外出度假时家中的灯能点亮;如果车库门忘了锁,监视感应器、IP 摄像头能立马给您短信通知;甚至还能让您了解孩子离家的行踪,以确保他们在某些时间段里呆在应该在的地方。下面让我们看看WULIANCG 保障家中安全的部分办法。 WULIANCG——回家时永不黑暗 当车库门或前门打开时,家中主要的灯或走廊灯会自动亮起。当您从一个房间走到另一个房间时,感应器会根据您的进入或离开自动控制不同房间灯光的开与关……尤其是您抱着睡着的孩子或是拿着一堆东西腾不开手时。 产品推荐: · WULIANCG 控制主机 ·门感应器 ·无线开关和调光器 ·感应器
WULIANCG——无时无刻照看您的家 您是否有过这样的经历,上班的时候突然想起车库的门似乎忘了锁?有了WULIANCG,就再也不用担心,如果车库的门没有锁好,系统会自动发邮件给您。您只需上网登录家庭系统,就能远程遥控把门锁上,保护家里安全。 产品推荐: · WULIANCG 控制主机 · 4Sight 远程控制软件 ·门触发器 当您外出度假或有个一年只去住几个月放松身心的别墅时,最不愿操心、的事就是担心家中是否安全。WULIANCG 能时刻帮您控制家中气温,防止结冰,还能在漏水时自动提醒您,安防系统能让您通过IP 摄像头和网络随时查看家中状况。您甚至还能远程操控家中的灯,让您不在家时家中的灯也能跟您在家时一样亮起。 产品推荐: · WULIANCG 控制主机
智能家居设计方案文档 随着近来住宅宽带网的迅速发展和普及,现代家庭内的电话线、电视线、网络线、音响线、防盗报警信号线等线路也越来越多,纷繁复杂,不一而足,因此家庭布线成为迫切的需求。现在家居弱电布线系统——家用弱电总管理箱已渐渐被广大消费者接受。然而,怎样才能建设一个适合自己的智能家居呢?据相关专家介绍,家庭智能化建设应该本着“实用为主,适当超前”的原则,根据自己的需求和消费能力,选择不同的解决方案: 1)、基础型:在主要厅、房内安装电话、网络、有线电视和影音出口;2)、扩展型:在居室所有房间内安装电话、网络出口,在主要厅、房内安装有线电视和影音出口、家庭灯光自动控制、和安防接口布置(门磁、煤气泄露、烟雾报警、微波红外探测报警、可视/非可视对讲等)。 3)、豪华型:在居室内所有需要和可能的位置安装电话、网络、有线电视和影音出口、家庭灯光自动控制以及安防接口布置(门磁、煤气泄露、烟雾报警、微波红外探测报警、可视/非可视对讲、网络监控、家电远程控制等)。 如果预算不够宽裕,可以先安装一个标准型“智能家居分线箱”,并规划、铺设好足够的线路,组建起基础的“智能家居布线系统”,这样既可以马上应用,将来还可以方便地更换、配置功能更强大的智能分线箱。(本文由耐格空间设计搜集整理) 弱电综合布线工程实例:
广州某住宅区一180平方米的复式结构住宅 弱电信息点设计方案: 有线电视点:客厅、客卧、儿童房、主卧、餐厅和主卫 卫星电视点:客厅和主卧(单独布线,其它房间可以通过AV分配共享卫星节目)AV系统:客厅、客卧、儿童房、主卧、餐厅和主卫 电话点:客厅、客卧、书房、儿童房、主卧、餐厅、厨房、主卫和客卫 宽带点:客厅(两处)、客卧、书房、儿童房、主卧、厨房、主卫 背景音乐:主卧、客卧、儿童房、餐厅、厨房、主卫和客卫(每个房间可单独控制音量大小) 窗磁:阳台3个, 门磁:入口1个 煤气泄露:1个 烟雾报警:3个 红外报警探头:客厅、客卧、书房、儿童房、主卧5个 幕帘式红外报警探头:阳台1个 紧急按钮:4个